A Fast and Noise Tolerable Binarization Method for Automatic License Plate Recognition in the Open Environment in Taiwan


Abstract
1. Introduction
2. Related Works
2.1. License Plate Detection
2.2. Character Segmentation
2.3. Character Recognition
2.4. Image Binarization
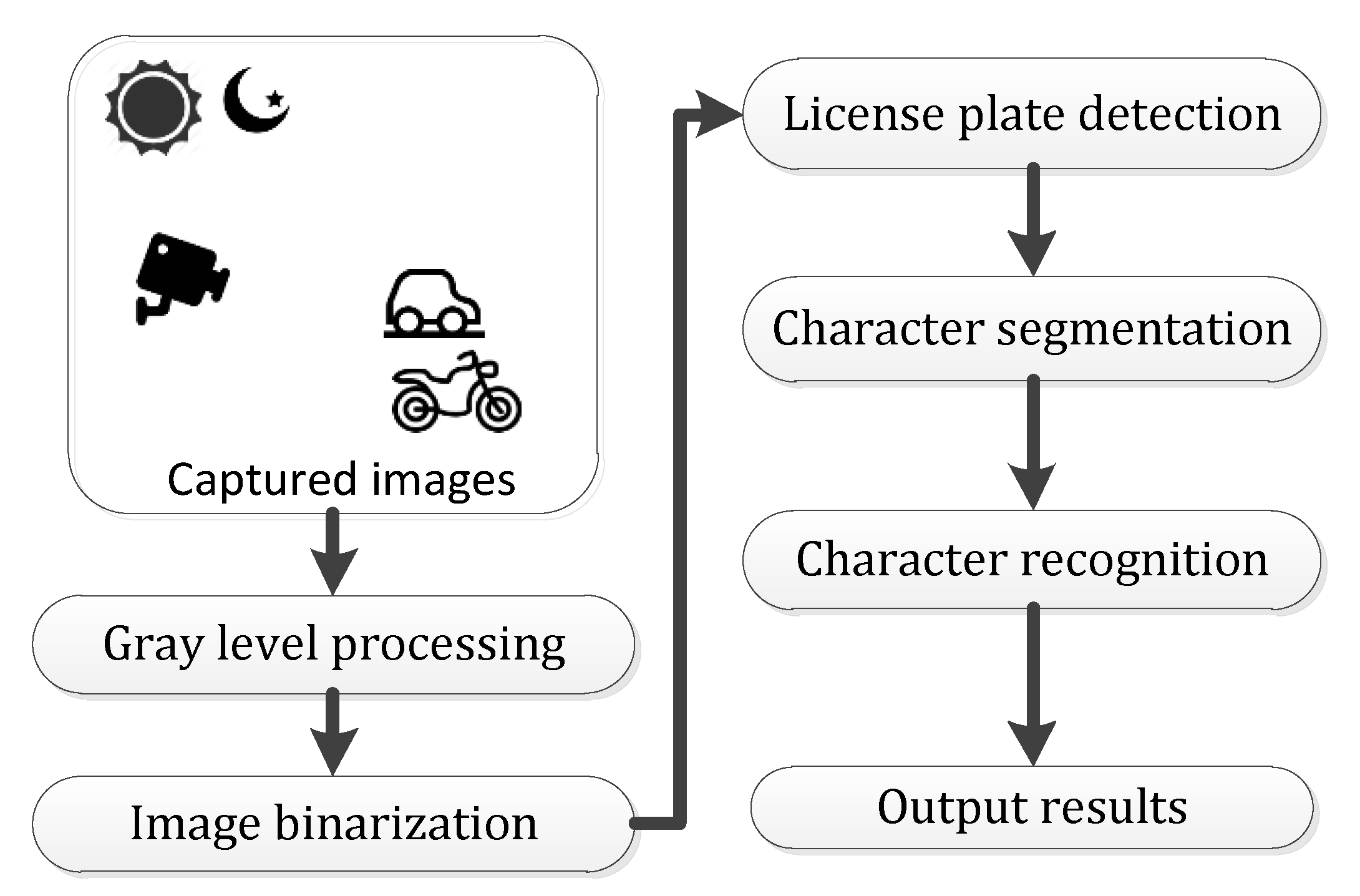
3. Proposed System
3.1. Gray Level Processing
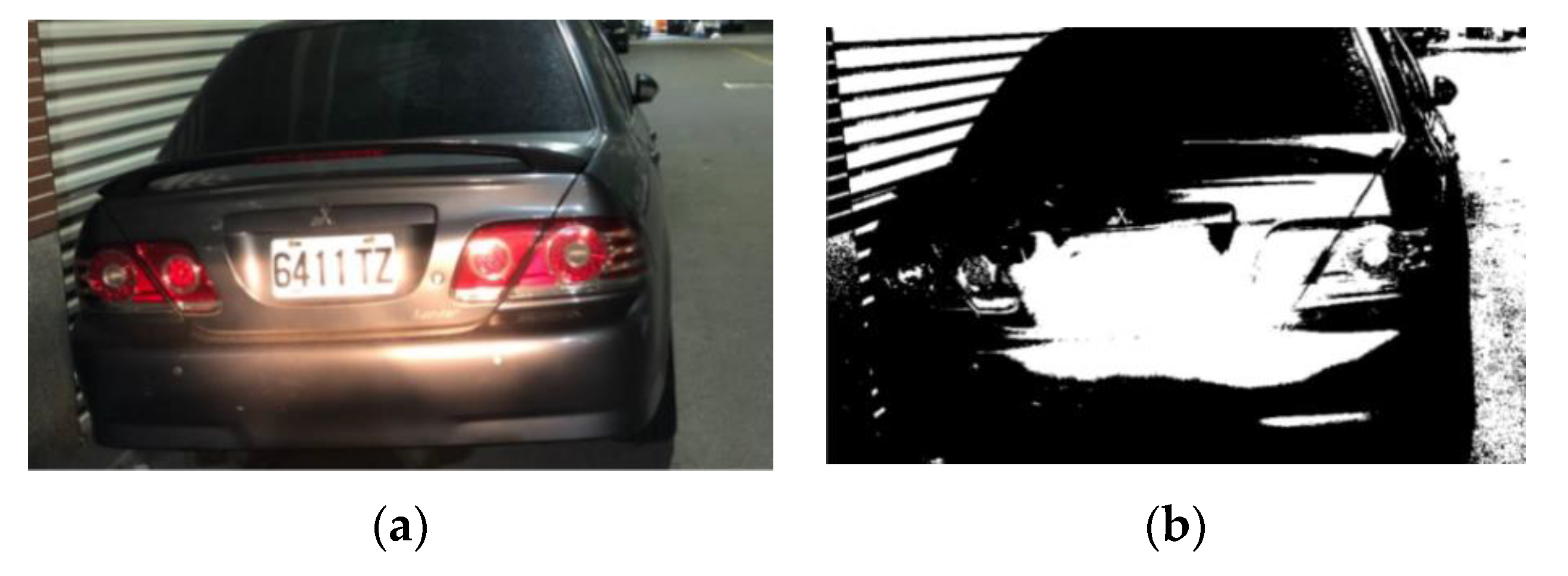
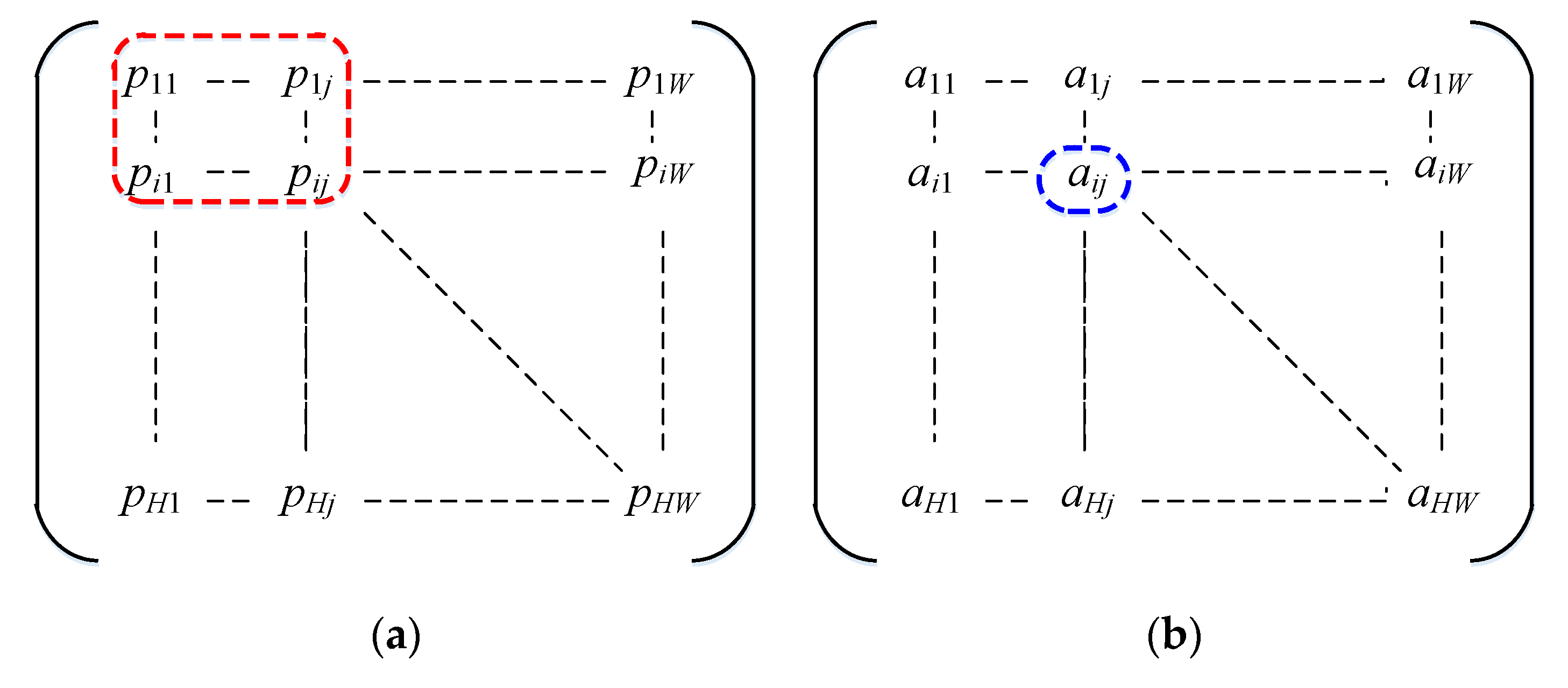
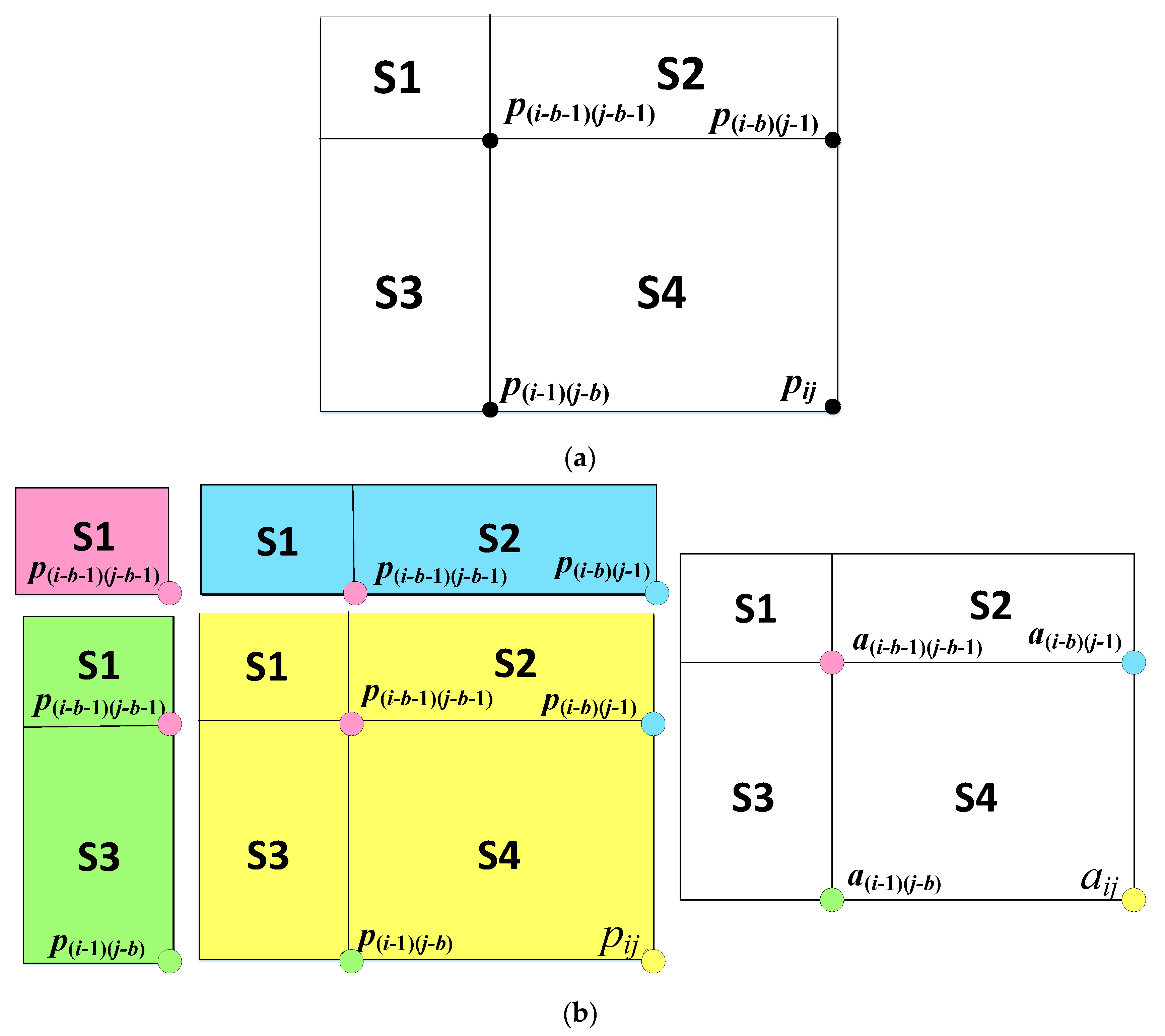
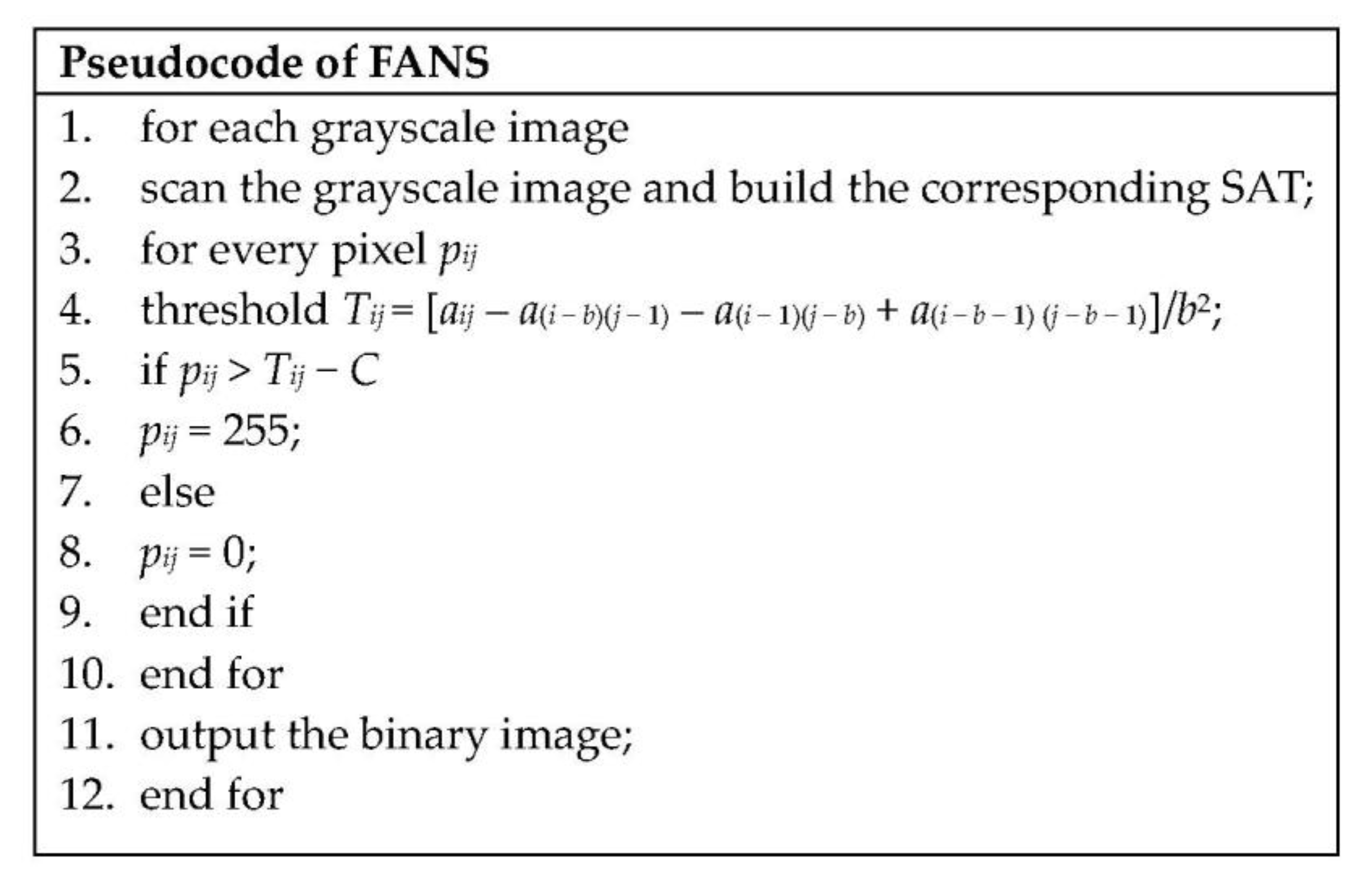
3.2. Fast and Noise Tolerable Binarization Algorithm
3.3. License Plate Detection and Character Segmentation
3.4. Character Recognition
4. Experimental Results and Discussions
4.1. Experimental Environment and Data
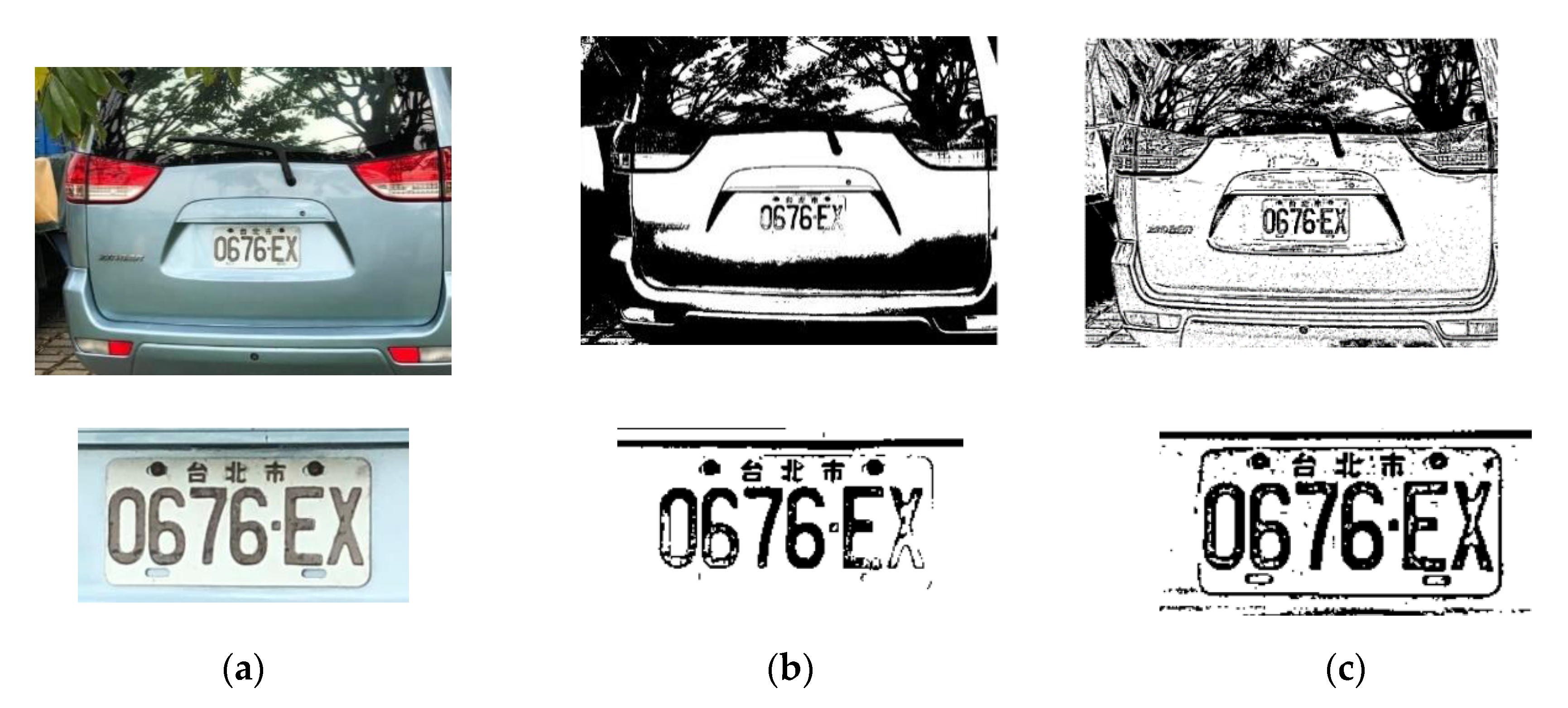
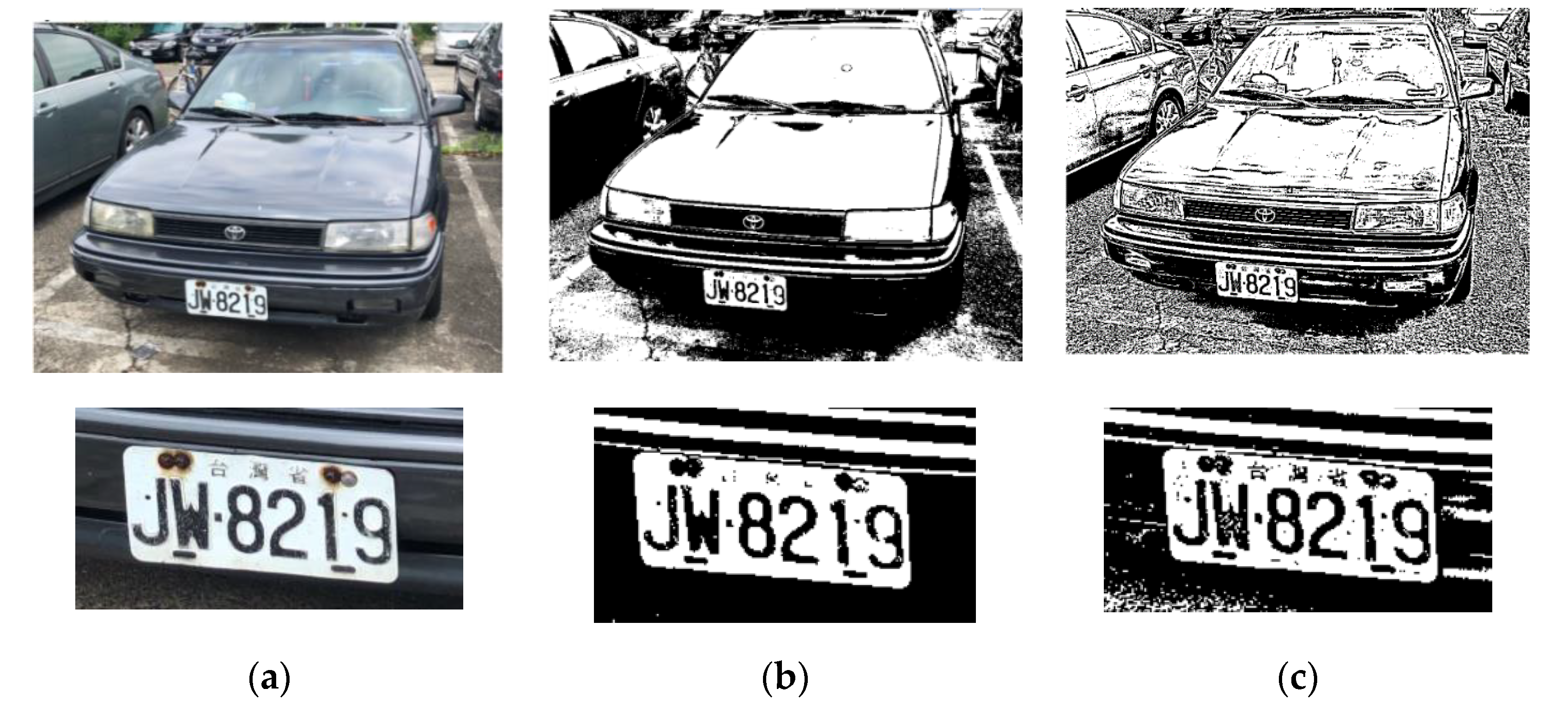
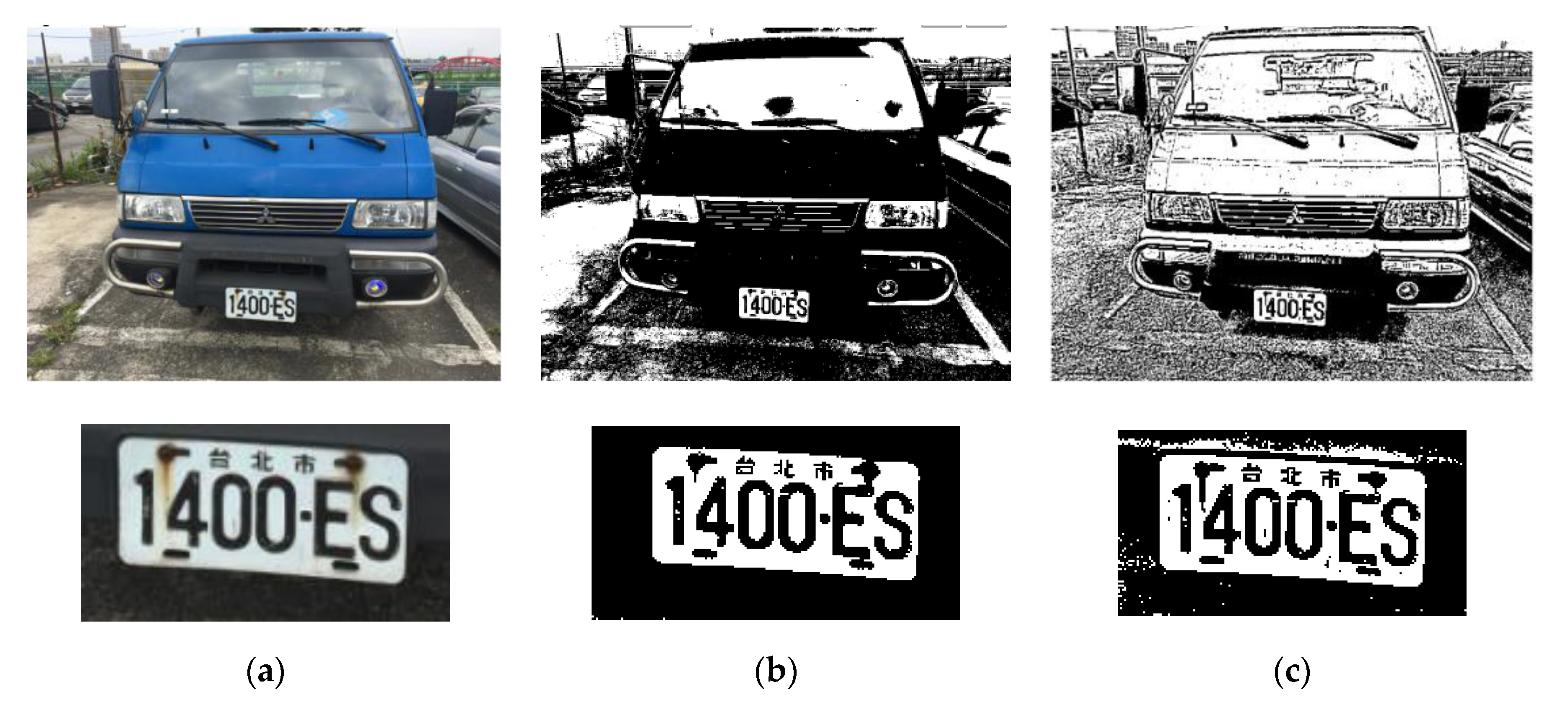
4.2. Comparisons between FANS and Otsu in the Daytime
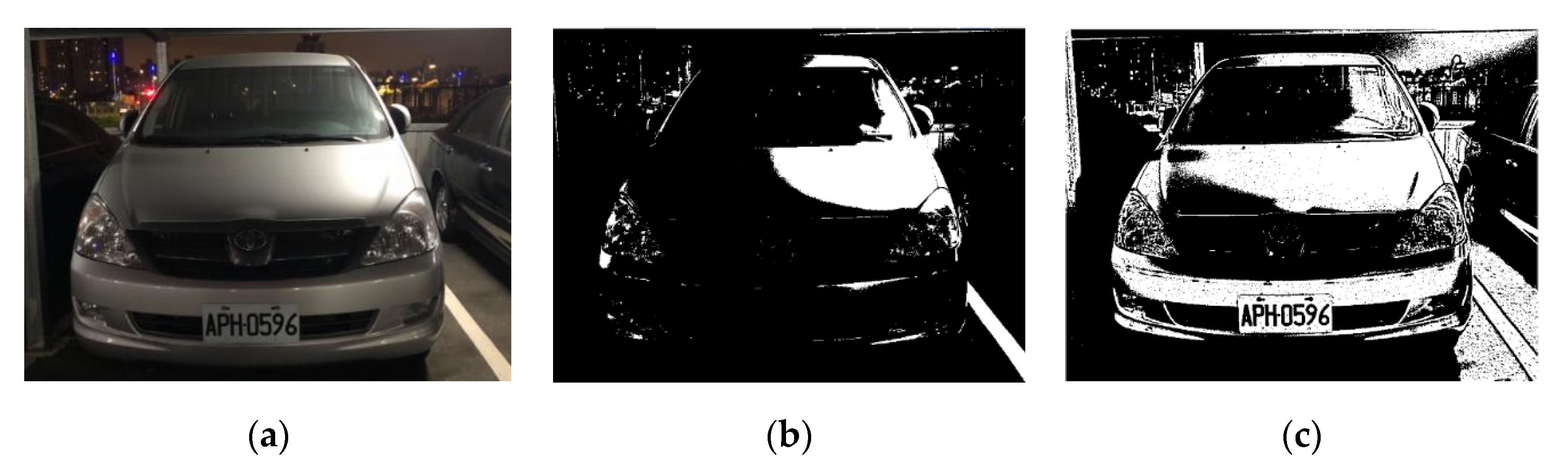
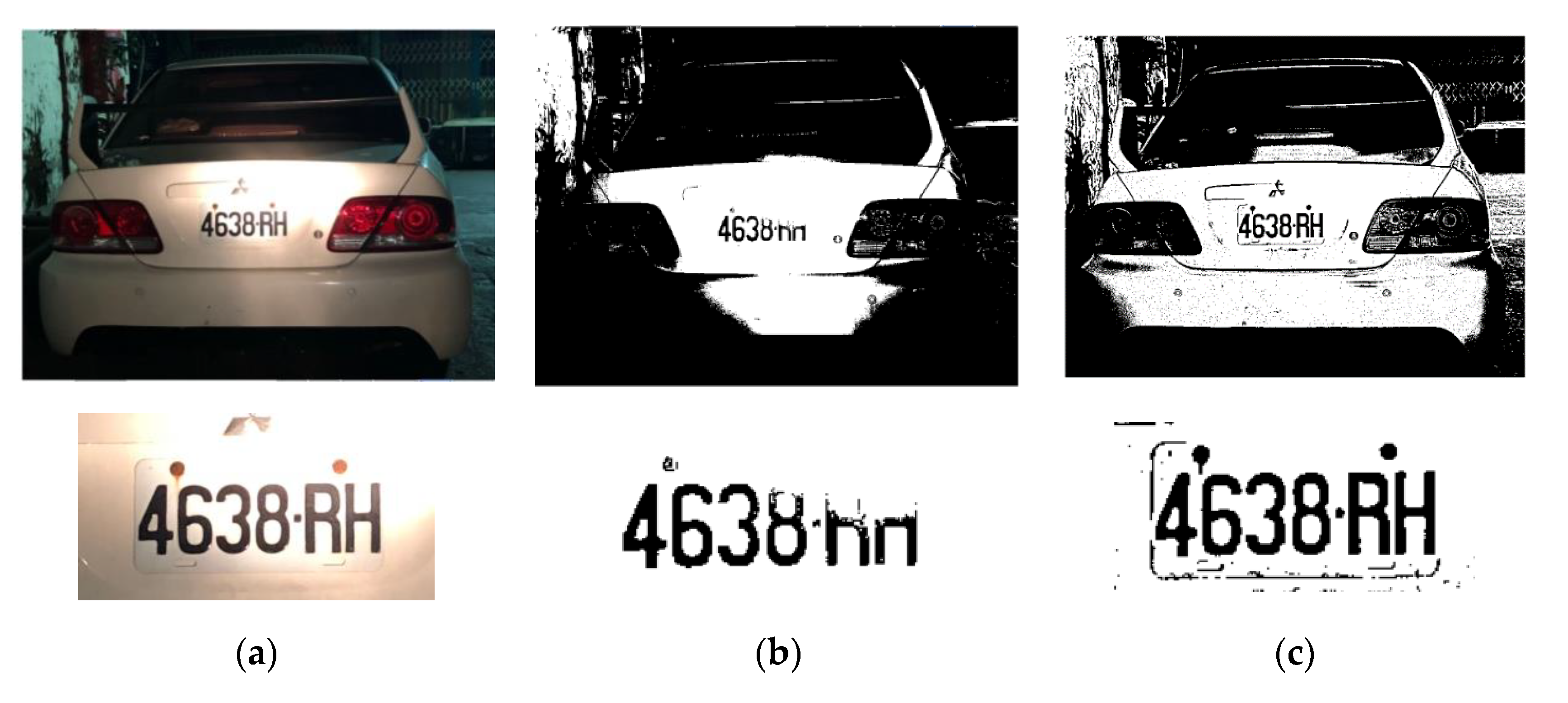
4.3. Comparisons between FANS and Otsu in the Nighttime
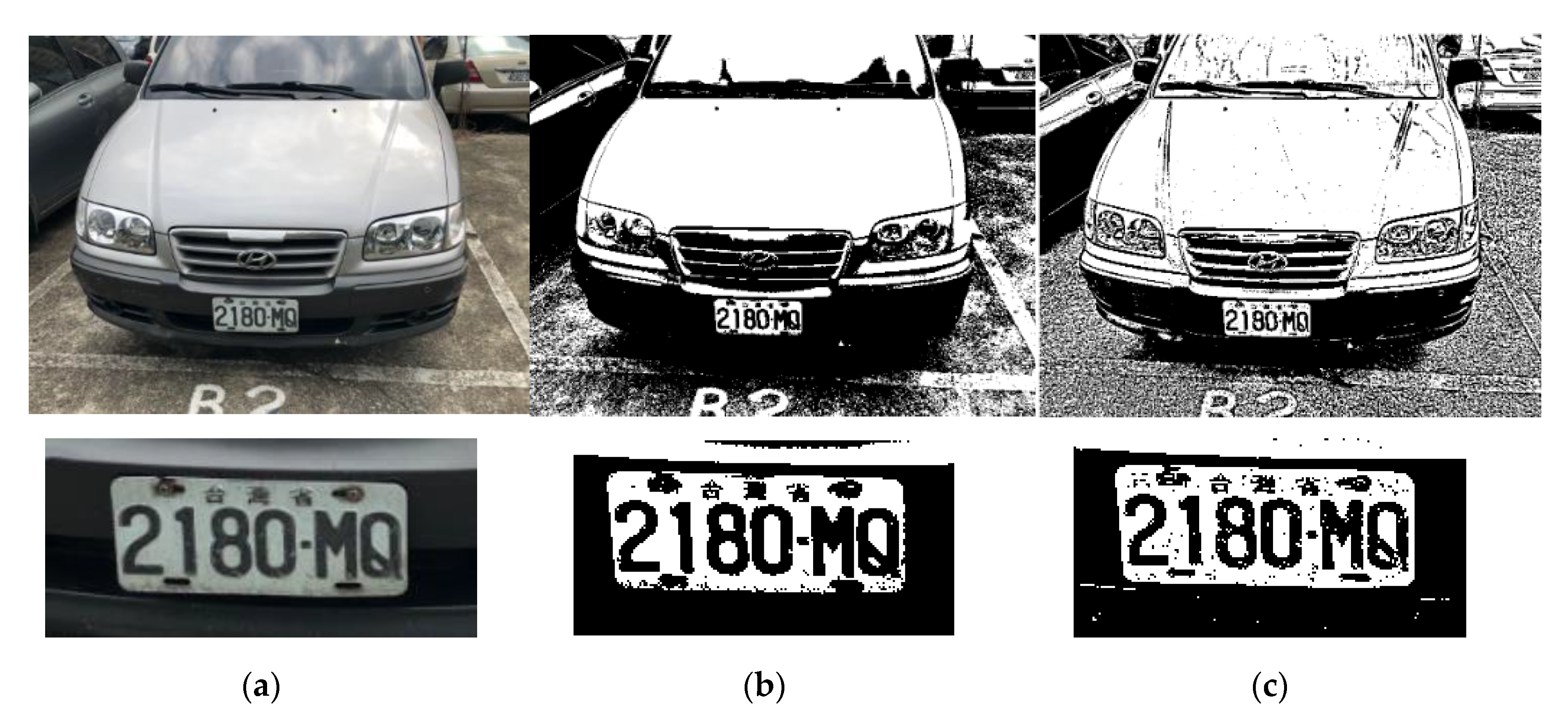
4.4. Comparisons between FANS and Otsu in Dealing with Dirty License Plates
4.5. Summary and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Deb, K.; Chae, H.-U.; Jo, K. Vehicle License Plate Detection Method Based on Sliding Concentric Windows and Histogram. J. Comput. 2009, 4, 771–777. [Google Scholar] [CrossRef]
- Kim, M.-K. Adaptive Thresholding Technique for Binarization of License Plate Images. J. Opt. Soc. Korea 2010, 14, 368–375. [Google Scholar] [CrossRef]
- Izidio, D.M.F.; Ferreira, A.P.A.; Medeiros, H.R.; Barros, E.N. An embedded automatic license plate recognition system using deep learning. Des. Autom. Embed. Syst. 2019, 24, 23–43. [Google Scholar] [CrossRef]
- Omar, N.; Sengur, A.; Al-Ali, S.G.S. Cascaded deep learning-based efficient approach for license plate detection and recognition. Expert Syst. Appl. 2020, 149, 113280. [Google Scholar] [CrossRef]
- Eslami, H.; Raie, A.A.; Faez, K. Precise Vehicle Speed Measurement Based on a Hierarchical Homographic Transform Estimation for Law Enforcement Applications. IEICE Trans. Inf. Syst. 2016, 99, 1635–1644. [Google Scholar] [CrossRef]
- Ahmed, R.E. GPark: Vehicle parking management system using smart glass. J. Sens. 2016. [Google Scholar] [CrossRef]
- Rajput, H.; Som, T.; Kar, S.; Hitesh, R. An Automated Vehicle License Plate Recognition System. Computer 2015, 48, 56–61. [Google Scholar] [CrossRef]
- Ashtari, A.H.; Nordin, J.; Fathy, M. An Iranian License Plate Recognition System Based on Color Features. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1690–1705. [Google Scholar] [CrossRef]
- Türkyılmaz, I.; Kaçan, K. License Plate Recognition System Using Artificial Neural Networks. ETRI J. 2017, 39, 163–172. [Google Scholar] [CrossRef]
- Al-Ghaili, A.M.; Mashohor, S.; Ramli, A.R.; Ismail, A. Vertical-Edge-Based Car-License-Plate Detection Method. IEEE Trans. Veh. Technol. 2012, 62, 26–38. [Google Scholar] [CrossRef]
- Du, S.; Ibrahim, M.; Shehata, M.; Badawy, W. Automatic License Plate Recognition (ALPR): A State-of-the-Art Review. IEEE Trans. Circuits Syst. Video Technol. 2012, 23, 311–325. [Google Scholar] [CrossRef]
- Ye, S.-Y.; Choi, J.-Y.; Nam, K.-G. The Detection of Rectangular Shape Objects Using Matching Schema. Trans. Electr. Electron. Mater. 2016, 17, 363–368. [Google Scholar] [CrossRef][Green Version]
- Gou, C.; Wang, K.; Yao, Y.; Li, Z. Vehicle License Plate Recognition Based on Extremal Regions and Restricted Boltzmann Machines. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1096–1107. [Google Scholar] [CrossRef]
- Tian, J.; Wang, G.; Liu, J.; Xia, Y. License plate detection in an open environment by density-based boundary clustering. J. Electron. Imag. 2017, 26, 33017. [Google Scholar] [CrossRef]
- Azam, S.; Islam, M. Automatic license plate detection in hazardous condition. J. Vis. Commun. Image Represent 2016, 36, 172–186. [Google Scholar] [CrossRef]
- Khare, V.; Shivakumara, P.; Chan, C.S.; Lu, T.; Meng, L.K.; Woon, H.H.; Blumenstein, M. A novel character segmentation-reconstruction approach for license plate recognition. Expert Syst. Appl. 2019, 131, 219–239. [Google Scholar] [CrossRef]
- Khan, M.; Sharif, M.; Javed, M.Y.; Akram, T.; Yasmin, M.; Saba, T. License number plate recognition system using entropy-based features selection approach with SVM. IET Image Process. 2018, 12, 200–209. [Google Scholar] [CrossRef]
- Gazcón, N.F.; Chesñevar, C.; Castro, S.M. Automatic vehicle identification for Argentinean license plates using intelligent template matching. Pattern Recognit. Lett. 2012, 33, 1066–1074. [Google Scholar] [CrossRef]
- Ridler, T.W.; Calvard, S. Picture thresholding using an iterative selection method. IEEE Trans. Syst. Man Cybern. 1978, 8, 630–632. [Google Scholar]
- Sezan, M.I. A peak detection algorithm and its application to histogram-based image data reduction. Comput. Vis. Graph. Image Process. 1990, 49, 36–51. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Sankur, B.; Sezgin, M. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imag. 2004, 13, 146–166. [Google Scholar] [CrossRef]
- Xue, J.H.; Titterington, D.M. t-tests, F-tests and Otsu’s Methods for image thresholding. IEEE Trans. Image Process. 2011, 20, 2392–2396. [Google Scholar] [PubMed]
- Boiangiu, C.A.; Tigora, A. Applying localized Otsu for watershed segmented images. Rom. J. Inf. Sci. Technol. 2014, 17, 219–229. [Google Scholar]
- Ieno, E.; Socarrás, L.M.G.; Cabrera, A.J.; Pimenta, T.C. Simple generation of threshold for images binarization on FPGA. Ing. Investig. 2015, 35, 69–75. [Google Scholar] [CrossRef]
- Crow, F.C. Summed-area tables for texture mapping. Comput. Graph. 1984, 18, 207–212. [Google Scholar] [CrossRef]
- Zhou, W.; Li, H.; Lu, Y.; Tian, Q. Principal Visual Word Discovery for Automatic License Plate Detection. IEEE Trans. Image Process. 2012, 21, 4269–4279. [Google Scholar] [CrossRef]
- Kamat, V.; Ganesan, S. An efficient implementation of the Hough transform for detecting vehicle license plates using DSP’S. In Proceedings of the Real-Time Technology and Applications Symposium, Chicago, IL, USA, 15–17 May 1995; pp. 58–59. [Google Scholar]
- Zheng, D.; Zhao, Y.; Wang, J. An efficient method of license plate location. Pattern Recognit. Lett. 2005, 26, 2431–2438. [Google Scholar] [CrossRef]
- Shi, X.; Zhao, W.; Shen, Y. Automatic license plate recognition system based on color image processing. In Proceedings of the International Conference on Computational Science and Its Applications, Singapore, 9–12 May 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 1159–1168. [Google Scholar]
- Yang, Y.Q.; Bai, J.; Tian, R.L.; Liu, N. A vehicle license plate recognition system based on fixed color collocation. In Proceedings of the IEEE Proceedings of 2005 International Conference on Machine Learning and Cybernetics, Guangzhou, China, 18–21 August 2005; pp. 5394–5397. [Google Scholar]
- Zhu, W.G.; Hou, G.J.; Xing, J. A study of locating vehicle license plate based on color feature and mathematical morphology. In Proceedings of the IEEE 6th International Conference on Signal Processing, Beijing, China, 26–30 August 2002; pp. 748–751. [Google Scholar]
- Kim, K.I.; Jung, K.; Kim, J.H. Color texture-based object detection: An application to license plate localization. In Pattern Recognition with Support Vector Machines. Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2002; Volume 2388, pp. 293–309. [Google Scholar]
- Porikli, F.; Kocak, T. Robust license plate detection using covariance descriptor in a neural network framework. In Proceedings of the IEEE International Conference on Video and Signal Based Surveillance, Sydney, Australia, 22–24 November 2006; p. 107. [Google Scholar]
- Castro-Zunti, R.D.; Yepez, J.; Ko, S.-B. License plate segmentation and recognition system using deep learning and OpenVINO. IET Intell. Transp. Syst. 2020, 14, 119–126. [Google Scholar] [CrossRef]
- Patel, C.; Shah, D.; Patel, A. Automatic Number Plate Recognition System (ANPR): A Survey. Int. J. Comput. Appl. 2013, 69, 21–33. [Google Scholar] [CrossRef]
- Nomura, S.; Yamanaka, K.; Katai, O.; Kawakami, H.; Shiose, T. A novel adaptive morphological approach for degraded character image segmentation. Pattern Recognit. 2005, 38, 1961–1975. [Google Scholar] [CrossRef]
- Rosenfeld, A.; De La Torre, P. Histogram concavity analysis as an aid in threshold selection. IEEE Trans. Syst. Man Cybern. 1983, 13, 231–235. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Hertz, L.; Schafer, R.W. Multilevel thresholding using edge matching. Comput. Vis. Graph. Image Process. 1988, 44, 279–295. [Google Scholar] [CrossRef]
- Chanda, B.; Majumder, D.D. A note on the use of the gray level co-occurrence matrix in threshold selection. Signal Process. 1988, 15, 149–167. [Google Scholar] [CrossRef]
- White, J.M.; Rohrer, G.D. Image Thresholding for Optical Character Recognition and Other Applications Requiring Character Image Extraction. IBM J. Res. Dev. 1983, 27, 400–411. [Google Scholar] [CrossRef]
- Prabhakar, P.; Anupama, P. A novel design for vehicle license plate detection and recognition. In Proceedings of the IEEE 2nd International Conference on Current Trends in Engineering and Technology, Coimbatore, India, 8 July 2014; pp. 7–12. [Google Scholar]
- Sauvola, J.; Pietikäinen, M. Adaptive document image binarization. Pattern Recognit. 2000, 33, 225–236. [Google Scholar] [CrossRef]
- Niblack, W. An Introduction to Digital Image Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1986. [Google Scholar]
- Halabi, Y.S.; Sasa, Z.; Hamdan, F.; Yousef, K.H. Modeling adaptive degraded document image binarization and optical character system. Eur. J. Sci. Res. 2009, 28, 14–32. [Google Scholar]
- Phansalkar, N.; More, S.; Sabale, A.; Joshi, M. Adaptive local thresholding for detection of nuclei in diversely stained cytology images. In Proceedings of the IEEE international conference on communication and signal processing, Calicut, India, 10–12 February 2011; pp. 218–222. [Google Scholar]
- Saxena, L.P. An effective binarization method for readability improvement of stain-affected (degraded) palm leaf and other types of manuscripts. Curr. Sci. 2014, 107, 489–496. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Procedure | Computation |
|---|---|
| Generate the histogram | WH |
| Threshold calculation | 256 |
| Image binarization | WH |
| Total | 2WH + 256 |
| Procedure | Computation |
|---|---|
| Generate the SAT | WH |
| Threshold calculation and image binarization | WH |
| Total | 2WH |
| Value C | # of Images | # of Correct Detection | # of correct Recognition | Detection Rate | Recognition Rate |
|---|---|---|---|---|---|
| 1 | 340 | 335 | 275 | 98.52% | 80.88% |
| 2 | 340 | 340 | 289 | 100% | 85.00% |
| 3 | 340 | 340 | 288 | 100% | 84.70% |
| 4 | 340 | 340 | 297 | 100% | 87.35% |
| 5 | 340 | 340 | 285 | 100% | 83.82% |
| 6 | 340 | 340 | 295 | 100% | 86.76% |
| 7 | 340 | 337 | 281 | 99.11% | 82.64% |
| 8 | 340 | 340 | 286 | 100% | 84.11% |
| 9 | 340 | 340 | 285 | 100% | 83.82% |
| 10 | 340 | 339 | 283 | 99.70% | 83.23% |
| 20 | 340 | 337 | 271 | 99.11% | 79.70% |
| 30 | 340 | 335 | 261 | 98.52% | 76.76% |
| 40 | 340 | 325 | 248 | 95.58% | 72.94% |
| 50 | 340 | 318 | 246 | 93.52% | 72.35% |
| Mask Size | # of Images | # of Correct Detection | # of Correct Recognition | Detection Rate | Recognition Rate |
|---|---|---|---|---|---|
| 3 × 3 | 340 | 317 | 220 | 93.23% | 64.70% |
| 5 × 5 | 340 | 306 | 219 | 90.00% | 64.11% |
| 7 × 7 | 340 | 336 | 271 | 98.82% | 79.70% |
| 9 × 9 | 340 | 340 | 297 | 100% | 87.35% |
| 11 × 11 | 340 | 340 | 272 | 100% | 80% |
| 13 × 13 | 340 | 338 | 283 | 99.41% | 83.23% |
| 15 × 15 | 340 | 340 | 278 | 100% | 81.76% |
| 17 × 17 | 340 | 340 | 269 | 100% | 79.11% |
| 19 × 19 | 340 | 340 | 273 | 100% | 80.29% |
| Method | # of Images | # of Correct Detection | # of Correct Recognition | Detection Rate | Recognition Rate |
|---|---|---|---|---|---|
| FANS | 170 | 170 | 158 | 100% | 92.94% |
| Otsu | 170 | 152 | 125 | 89.41% | 73.52% |
| Method | # of Images | # of Correct Detection | # of Correct Recognition | Detection Rate | Recognition Rate |
|---|---|---|---|---|---|
| FANS | 170 | 170 | 139 | 100% | 81.76% |
| Otsu | 170 | 138 | 103 | 81.17% | 60.58% |
| Method | # of Images | # of Correct Detection | # of Correct Recognition | Detection Rate | Recognition Rate |
|---|---|---|---|---|---|
| FANS | 44 | 44 | 41 | 100% | 93.18% |
| Otsu | 44 | 31 | 22 | 70.45% | 50.00% |
| Method | # of Images | # of Correct Detection | # of Correct Recognition | Detection Rate | Recognition Rate |
|---|---|---|---|---|---|
| Otsu (1979) [21] | 340 | 290 | 228 | 85.29% | 67.05% |
| Halabi et al. (2009) [46] | 340 | 340 | 292 | 100% | 85.88% |
| Phansalkar et al. (2011) [47] | 340 | 340 | 302 | 100% | 88.88% |
| Saxena (2014) [48] | 340 | 340 | 315 | 100% | 92.65% |
| FANS (2020) | 340 | 340 | 297 | 100% | 87.35% |
| Method | Average Execution Time (s) |
|---|---|
| Otsu (1979) [21] | 0.7066 |
| Halabi et al. (2009) [46] | 2.2984 |
| Phansalkar et al. (2011) [47] | 1.6467 |
| Saxena (2014) [48] | 3.1550 |
| FANS (2020) | 0.6817 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, C.-C.; Tsai, C.-J.; Chang, T.-Y.; Yeh, J.-Y.; Dai, H.; Tsai, M.-H. A Fast and Noise Tolerable Binarization Method for Automatic License Plate Recognition in the Open Environment in Taiwan. Symmetry 2020, 12, 1374. https://doi.org/10.3390/sym12081374
Peng C-C, Tsai C-J, Chang T-Y, Yeh J-Y, Dai H, Tsai M-H. A Fast and Noise Tolerable Binarization Method for Automatic License Plate Recognition in the Open Environment in Taiwan. Symmetry. 2020; 12(8):1374. https://doi.org/10.3390/sym12081374
Chicago/Turabian StylePeng, Chun-Cheng, Cheng-Jung Tsai, Ting-Yi Chang, Jen-Yuan Yeh, Hsun Dai, and Min-Hsiu Tsai. 2020. "A Fast and Noise Tolerable Binarization Method for Automatic License Plate Recognition in the Open Environment in Taiwan" Symmetry 12, no. 8: 1374. https://doi.org/10.3390/sym12081374
APA StylePeng, C.-C., Tsai, C.-J., Chang, T.-Y., Yeh, J.-Y., Dai, H., & Tsai, M.-H. (2020). A Fast and Noise Tolerable Binarization Method for Automatic License Plate Recognition in the Open Environment in Taiwan. Symmetry, 12(8), 1374. https://doi.org/10.3390/sym12081374