1. Introduction
Contemporary mathematical models of heat exchange processes describe not only their steady-state behavior but also their dynamic properties, which are relevant, e.g., to design effective control algorithms. The first, relatively simple attempt is the process representation as the
lumped parameter system (LPS), usually in the form of ordinary differential equations (ODEs) which can describe dynamically changing phenomena, such as temperature or flow variations in time. However, in the case where the spatial effects cannot be neglected or averaged without significant loss of model quality, it needs to be considered to be the
distributed parameter system (DPS). Such models are mostly described by partial differential equations (PDEs), and this approach is not uncommon for the phenomena taking place, e.g., inside different types of heat exchangers. Therefore, a lot of attention has been devoted so far in the literature to the PDE-based modeling of these thermal devices, which are often described by hyperbolic equations resulting from the balance laws of continuum physics. The development of the PDE-based phenomenological modeling methods progressed in two parallel directions, with the use of either analytical [
1,
2,
3,
4,
5,
6,
7,
8] or numerical [
9,
10,
11,
12,
13,
14,
15] approaches. The other approach consists of using data-based techniques, also known as
black-box modeling or process identification [
16,
17,
18], or even in using artificial neural networks [
19,
20,
21]. The so-called gray-box modeling approach, which combines qualitative prior knowledge with quantitative data, can also be used here [
22,
23,
24].
Although strictly based on the process phenomenology and thus very precise, PDE models have some practical drawbacks which makes them not very convenient, e.g., for the control system design. This is mainly due to the fact that they do not express directly the relationships between the output (controlled) and the input (manipulated) variables of the modeled system, which is of great importance from the control point of view. However, such features are typical of the transfer function representation, which is commonly used, e.g., within signal processing and control systems engineering. The main advantage of this method is that the knowledge of the transfer function of the system allows determining its steady-state, as well as frequency- and time-domain responses, focusing on the relationship between its input and output signals. Consequently, it constitutes a convenient starting point for computer-based implementation of different control algorithms.
Therefore, many works in the literature have been devoted so far to the transfer function-oriented modeling of heat exchange phenomena. These models are often expressed by the extremely simplified transfer functions, such as first or second order with time delay, which may, however, be useful for some applications such as control design [
25,
26,
27]. On the other hand, there are some papers where the more accurate, irrational transfer function models are considered which are derived from the PDE representation of the heat exchange processes [
28,
29,
30,
31,
32]. The author’s works [
33,
34] can also be included into this category. However, such irrational transfer functions, although accurately describe the spatio-temporal nature of the heat exchange process, bring some difficulties to the practical implementation. As stated in [
9], their complex transcendental form makes them inconvenient to use in standard control system design and simulation methods.
In the current paper we consider transfer function representation for a typical double-pipe heat exchanger, which can be seen as an intermediate between both of the above-mentioned approaches. We start with the infinite-dimensional process representation in the form of symmetric hyperbolic PDEs, which are typical of engineering processes such as heat exchangers, gas absorbers, tubular reactors and irrigation canals [
35]. Next, we apply the so-called method of lines (MOL) which transforms the model to the high- but finite-dimensional representation in the form of ordinary differential equations (ODEs). Consequently, we obtain high-order rational transfer function model of the exchanger which is much more accurate than the simple first-order-with-delay transfer functions mentioned above. Such a model can approximate the dominant dynamic behavior of the original system while being accurate enough for control and analysis needs. As far as it is known to the author, only a few papers have analyzed rational transfer function models for heat exchangers in such way, i.e., starting from their PDE representation. One of these few is the work by [
36], wherein the rational transfer function model is obtained from the irrational one by rationalization of its irrational terms, and another is the paper [
37] where coupled linearized PDEs are reduced into low-order nominal process models using the so-called orthogonal collocation method.
The remainder of the paper is ordered as follows.
Section 2 recalls the results of our paper [
34] concerning mathematical models for a thick-walled double-pipe heat exchanger in the form of PDEs and resulting irrational transfer functions.
Section 3 presents the transformation of the PDE into the ODE representation using method of lines, and derivation of approximate rational transfer functions.
Section 4 compares the frequency-domain and steady-state responses evaluated based on the original transfer function representation and the approximate transfer function models of different orders. Finally,
Section 5 gives a conclusion and future work prospects.
2. Distributed Parameter Model of the Heat Exchanger
One of the most simple and applicable heat exchangers are the double-pipe ones. They are widely used in chemical, food, oil and gas industries [
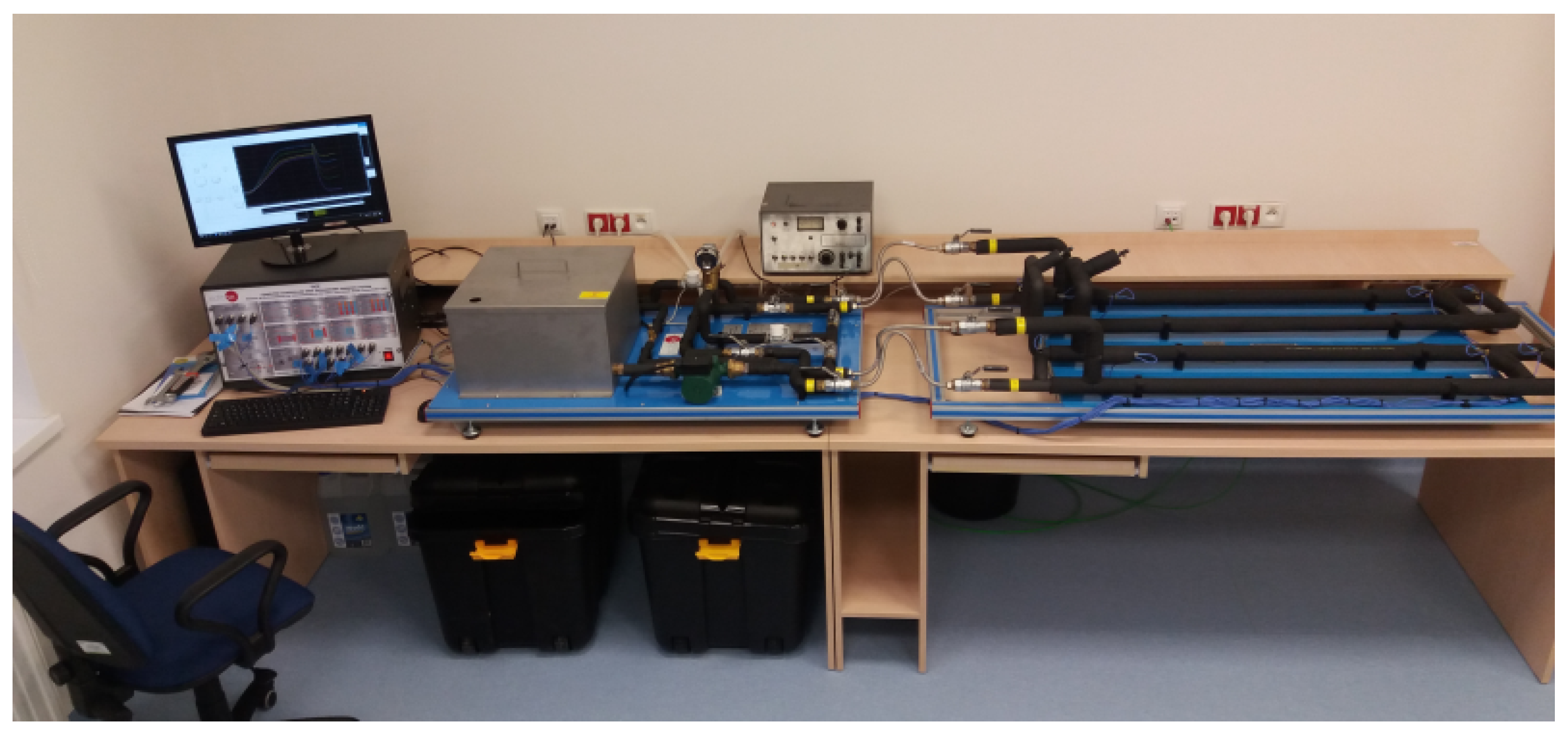
38]. Despite their simplicity and relatively low efficiency, double-pipe heat exchangers are very important also due to their educational value in teaching the basics of heat exchanger design and control (see
Figure 1). Besides, they form the structural basis for many more complex constructions, such as, e.g., shell-and-tube heat exchangers or steam generators [
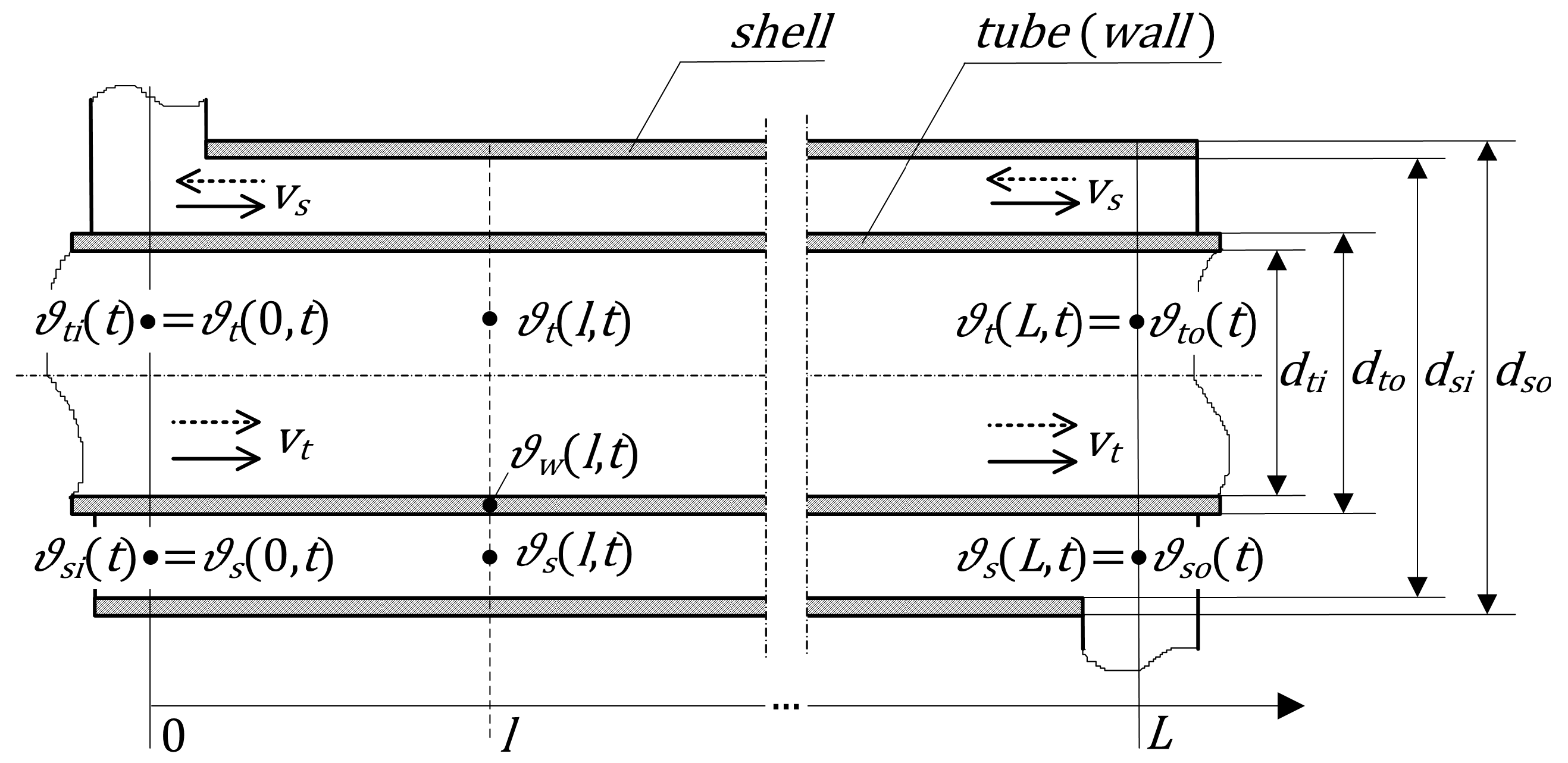
34]. This type of heat exchanger consists of two concentric tubes through which flow heat exchanging fluids, from the inlet of each tube towards its outlet (
Figure 2). Usually, hot process fluid flows through the inner pipe and transfers its heat to the cold one flowing in the outer pipe. To distinguish them from each other, the external tube will be referred as
shell and the internal—as
wall or simply as
tube. Depending on the flow directions, we can distinguish two exchanger operation modes. The parallel-flow (or co-current) configuration is when the flow of the two streams is in the same direction, and the counter-flow (or counter-current) one is when the flow of the streams run in opposite directions. In this paper, we focus on the first case.
2.1. Governing PDEs
For the purpose of developing the mathematical model of the heat exchanger of
Figure 2, we use the energy balance equations with the following simplifying assumptions [
4,
28,
34,
39,
40]:
exchanger is perfectly insulated from the environment;
there are no internal thermal energy sources inside;
the flows are sufficiently turbulent to cause effective heat transfer;
only forced heat convection is considered (i.e., longitudinal heat conduction within the fluids and wall is neglected);
pressure drops of fluids along the shell and the tube are negligible;
the densities and heat capacities of the shell, tube and fluids are time and space invariant;
the convective heat transfer coefficients are constant and uniform over each surface.
Taking into account the above simplifications, the dynamical properties of the double-pipe heat exchanger depicted in
Figure 2 are governed by the following hyperbolic PDE system:
where
represents time,
is the space variable and
,
,
,
are constant parameters depending on the shell and tube diameters, physical parameters of the fluids and the material of the exchanger:
where
d is the diameter,
is the density,
c is the specific heat and
h is the heat transfer coefficient (subscripts as for the temperatures in
Figure 2). Since both matrices of coefficients on the left side of Equations (
1)–(3) are diagonal, and thus symmetric, the considered system can be classified as
symmetric hyperbolic system of balance laws [
35].
To provide a unique solution of the PDEs (
1)–(3), the appropriate
initial and
boundary conditions need to be specified. The initial conditions can be assumed by the following expressions:
where
are functions describing the initial temperature profiles along the exchanger.
Furthermore, the boundary conditions will depend here on one of the flow configurations shown in
Figure 2. In this paper, we consider parallel flow with
and
, for which the boundary conditions can be written in the following form:
where
and
represent the inlet temperatures of the tube- and the shell-side fluids, respectively, i.e., their temperatures measured at
. Therefore, from the control theory point of view, these inlet temperatures can be seen as the
boundary input signals to the heat exchanger system. Their variations in time affect the temperature distribution of both fluids along the exchanger, and, most importantly, their outflow temperatures at
,
which in turn, can be seen as the
boundary output signals.
The input signals given by Equation (
6) can be considered either as controls or disturbances. More precisely, the inlet temperature of the heating tube-side fluid
can be taken as the control signal, whereas the variations in the inlet temperature of the heated shell-side fluid
can be seen as disturbances. The typical control task is here to stabilize the outlet temperature of the heated shell-side fluid
given by (
7) on the desired setpoint, in the presence of disturbances caused by variations in
given by (
6).
2.2. Distributed Transfer Function Model
As follows from the comments in the introductory
Section 1 and at the end of
Section 2.1, it would be desirable to apply here some kind of mathematical representation of the input–output relationship between the boundary temperatures of the exchanger. Such a representation, expressed in the Laplace transform domain, is commonly used in the fields of signal processing and control theory and known as the
transfer function of a dynamical system. Below, we recall results on the transfer function representation of the considered double-pipe heat exchanger which were presented in our work [
34]. Since we are dealing with the distributed parameter system, we consider here the
distributed transfer functions , where the value of the transfer function depends not only of the complex variable
s, but also on the spatial position
l at which this transfer function is evaluated.
Distributed transfer functions of the heat exchanger working in the parallel-flow configuration with the boundary inputs given by Equation (
6) can be written in the following matrix form:
where
assuming zero initial conditions in Equation (
5). The symbol
in (
9) denotes the Laplace transform of the function
in the time-domain variable
t. We assume here that in the expression
the parameter
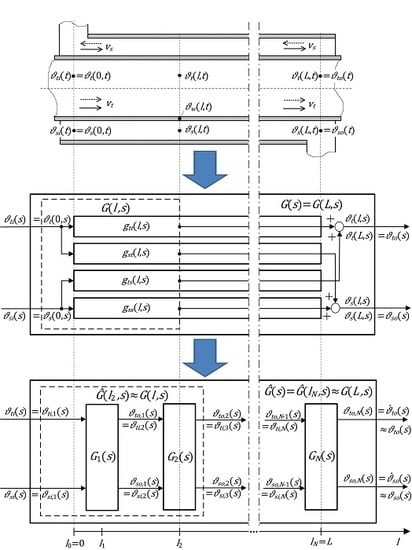
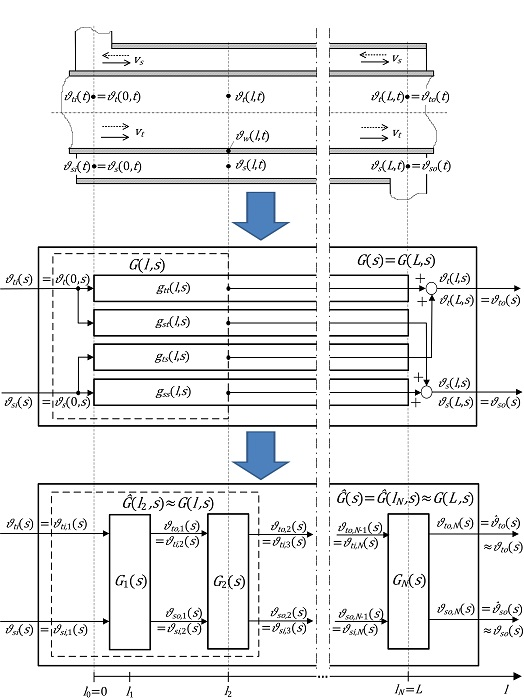
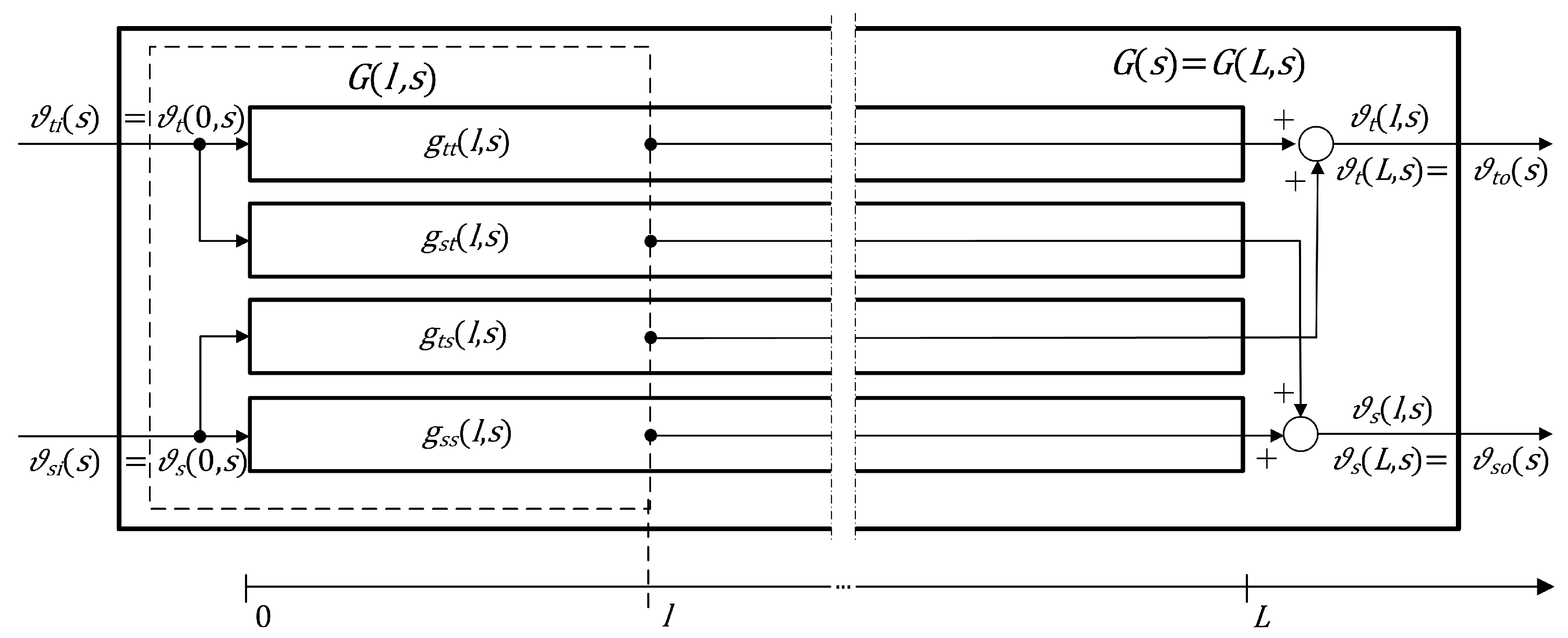
s alone indicates the Laplace transform. The block diagram of the distributed transfer function model for the considered parallel-flow double-pipe heat exchanger is presented in
Figure 3. As shown in the diagram, the temperature distribution of both fluids along the axis of the exchanger can be expressed in the Laplace transform domain, assuming zero initial conditions, by the following equations:
where
and
are the Laplace-transformed tube- and shell-side fluid inlet temperatures given by Equation (
6).
As shown in Section 3.1 of [
34], the individual transfer functions in (
9) take the following form:
where
and
with
The irrational form of the transfer functions given by Equations (
12)–(
18) is manifested by the exponential functions appearing therein, resulting from the heat convection taking place inside the pipes, as well as by the square root function in Equation (
18) which is typical, among others, of heat conduction phenomena. Therefore, these transfer functions can also be classified as the
fractional ones which have received increasing attention in the literature (see, e.g., [
41]).
Assuming
in Equations (
8)–(
15), we obtain the
boundary transfer functions of the heat exchanger, i.e., the transfer functions representing the relationships between the boundary inputs
,
in Equation (
6) and the boundary outputs
,
in Equation (
7)—see also
Figure 3.
Zero heat conduction. For this special case we have
in Equation (
4) and, consequently,
in Equations (
1)–(3). As a result, we get
in Equations (
16)–(
18), and, consequently,
which results in the transfer function matrix (
8) of the following simple form:
being the time delays of the tube- and shell-side fluids, respectively.
Therefore, the resulting dynamical system can be now seen as two separate pure time-delay subsystems with the time delays
and
given by (
20), representing two fluids “traveling” along the exchanger with unchanged inlet temperature profiles,
and
.
2.3. Frequency-Domain Responses
Frequency-domain analysis of a dynamical system shows how the energy of the input signal(s) is distributed inside the system over a range of frequencies. It is closely related to the transfer function representation of the system. To obtain the frequency responses of the considered heat exchanger, the operator variable
s in the expressions for the transfer functions presented in
Section 2.2 needs to be replaced with the expression
, where
is the angular frequency. This operation transforms the system representation from the Laplace transform domain to the Fourier transform domain, which, in turn, can be seen as the frequency-domain description of the system.
In the considered case of DPS, the graphical representation of its frequency responses can take the form of three-dimensional graphs, showing their dependence on both the angular frequency
and the space variable
l. Another possibility is their representation in the form of classical two-dimensional plots, determined for the fixed value of the space variable, e.g., for the exchanger outflow point
(see
Figure 2). These responses can be represented in several ways, of which two are most commonly used in control theory: Nyquist and Bode plots. The Bode plot is a combination of a magnitude plot, expressing the magnitude of the frequency response, and a phase plot, expressing the phase shift. The expressions for the logarithmic magnitude
and phase
take here the following form [
39]:
respectively, where the expressions for the modulus and argument of the frequency response are as follows:
In the case of the Nyquist plot, the real part of the transfer function is plotted on the X axis (assuming a fixed value of l, e.g., ), whereas the imaginary part is plotted on the Y axis.
Some specific examples of the frequency response plots for the considered parallel-flow heat exchanger are shown later in
Section 4. The “exact” frequency responses, i.e., the responses resulting from the irrational transfer functions introduced in
Section 2.2, are there compared to the frequency responses obtained from the approximate rational transfer functions derived later in
Section 3.
2.4. Steady-State Temperature Distribution
In the case of LPSs, where the spatial effects are neglected or averaged, their steady-state solutions provide information about the static input–output mappings of the system. For the DPSs which are usually mathematically described by PDEs, their steady-state solutions also contain information about the fixed distribution of the physical quantities inside their spatial domains. Therefore, for the double-pipe heat exchanger considered here, the steady-state solution provides not only information about the constant outlet temperatures and of both fluids in the thermodynamic equilibrium conditions, but it also describes constant temperature profiles , and along the axis of the exchanger, which may be of great importance, e.g., from a technological point of view.
As shown in our paper [
34], the constant steady-state solution for the considered heat exchanger can be obtained by assuming all time derivatives in Equations (
1)–(3) equal to zero, and solving the resulting boundary value problem with the boundary conditions (
6) representing constant inlet temperatures
and
of both fluids. An equivalent way to obtain this solution is based on the insight that the steady-state responses can be seen as the specific case of the frequency-domain responses evaluated for
. Therefore, they can be obtained by assuming
in the transfer functions presented in
Section 2.2. Following this idea, the steady-state temperature profiles
and
of the tube- and shell-side fluids, respectively, can be determined, based on Equations (
10) and (
11) with
and constant inlet temperatures
and
, from the following formulas:
where
are the steady-state versions of the transfer functions (
12)–(
15), with
,
,
,
and
given by (
16)–(
18).
Having determined the steady-state distribution of both fluids from Equations (
23)–(
25), it is possible to calculate also the steady-state temperature profile for the wall from the steady-state version of Equation (2) as
An example of the steady-state temperature distribution for the considered parallel-flow double-pipe heat exchanger is shown later in
Section 4, together with its approximation resulting from the rational transfer function model.
4. Results and Discussion
Since the considered double-pipe heat exchanger represents a typical DPS, the “exact” spatio-temporal representation of its dynamics is given by the PDEs introduced in
Section 2.1, and alternatively by the irrational transfer functions discussed in
Section 2.2. For the simulation purpose we assume the following parameter values in Equations (
1)–(
4):
= 1000
(water),
= 7800
(steel),
=
= 4200
(water),
= 500
(steel),
=
= 6000
,
= 0.09 m,
= 0.1 m,
= 0.15 m,
L = 5 m,
1 m/s,
= 0.1 m/s.
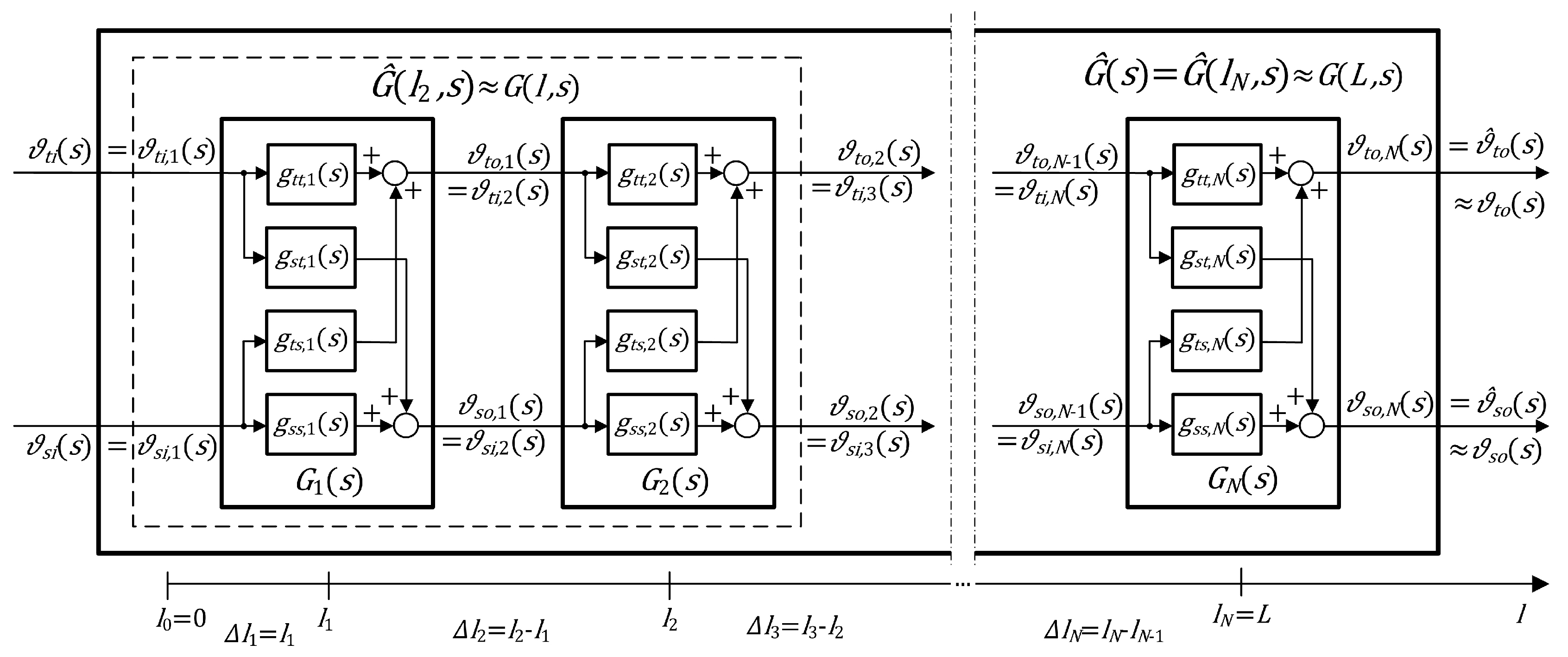
Turning to the approximation model introduced in
Section 3, we assume that the spatial domain
is divided, e.g., into
uniform sections. Consequently, we obtain the following spatial grid size:
and, for the parameter values assumed above, the following matrices of the state-space model in (
41):
with the following negative real eigenvalues of
:
implying that the single section represents an exponentially stable dynamical subsystem.
The transformation given by Equation (
44) results in the transfer functions matrix
of the single section consisting of the following elements:
whose poles are equal to the eigenvalues given by Equation (
54).
The cascade interconnection of
N uniform sections, each described by the transfer function matrix
with the elements given by (
55), results in the stable approximation model given by the following approximate distributed transfer function matrix
, which can be obtained based on Equation (
48) as
Assuming
, and, consequently,
in Equation (
56), we obtain the approximate boundary transfer function matrix of the heat exchanger,
where
represents its original irrational boundary transfer function matrix discussed in
Section 2.2.
4.1. Frequency Responses
As mentioned in
Section 2.3, the frequency responses of the considered heat exchanger can be shown in the form of three-dimensional plots, expressing their dependence on both the angular frequency
and the space variable
l. Some examples of such 3D Bode plots are presented in our previous work [
34]. However, most useful from the practical point of view are the classical two-dimensional Bode and Nyquist plots evaluated at the system outputs, both situated for the considered parallel-flow configuration at
. The analysis below compares these plots obtained from the original irrational transfer functions discussed in
Section 2.2 and from their rational approximations of different order, introduced in
Section 3.2.
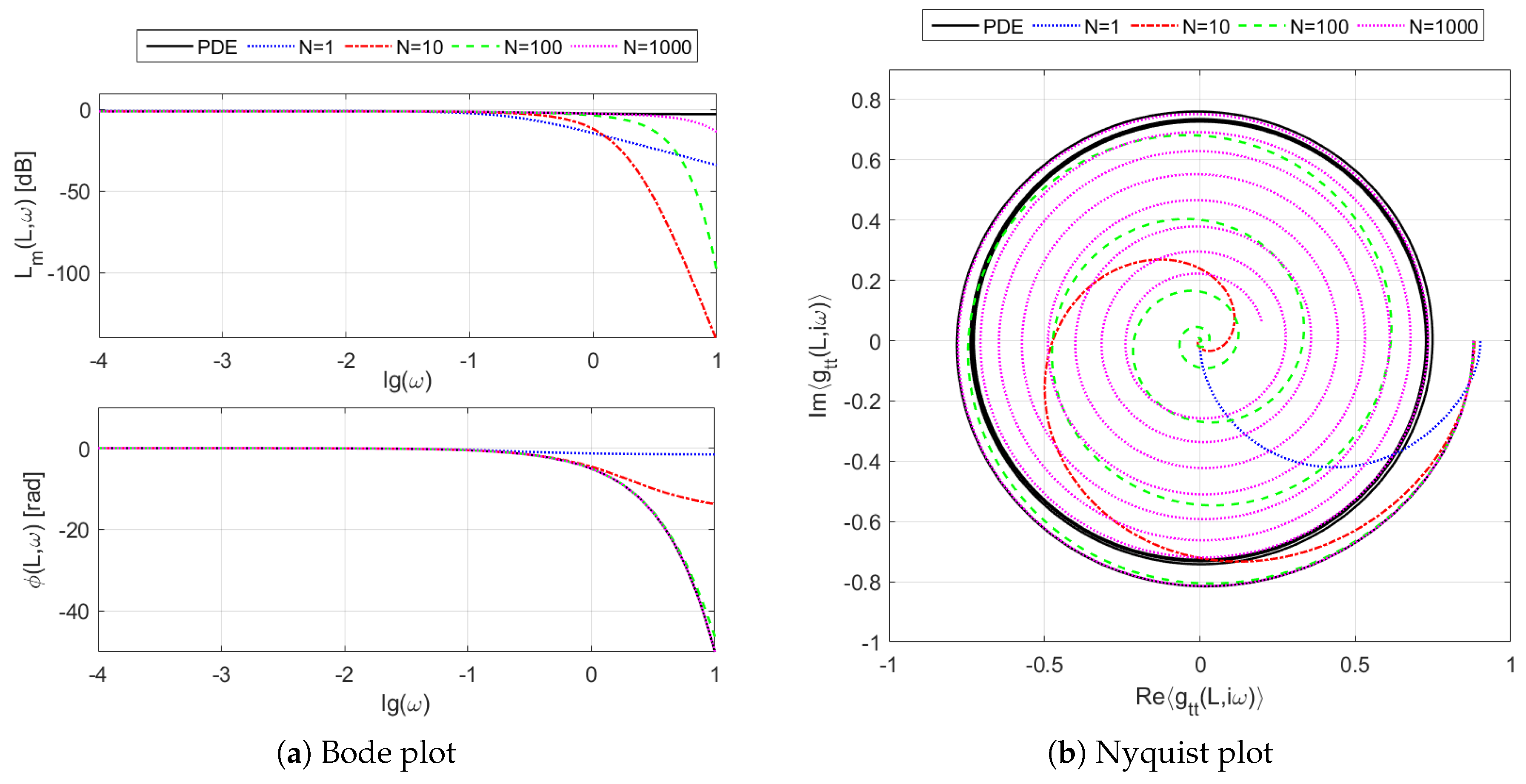
Figure 5 shows the Bode (5a) and Nyquist (5b) plots of the frequency responses evaluated from the boundary transfer function
of the considered heat exchanger. These plots contain both the original frequency response
obtained from Equations (
21) based on the irrational transfer function
given by Equation (
13), as well as the approximate frequency responses
resulting from the approximate rational transfer function
discussed in
Section 3.2.2.
The oscillations visible in the Bode diagram of
Figure 5a, which can be also observed as the “loops” on the Nyquist plot of
Figure 5b, are closely associated with the resonance-like phenomena taking place inside the exchanger pipes. They can be observed both in theoretical models as well as in laboratory experiments—see, e.g., [
8]. It should be, however, emphasized that the “resonance” occurring in the considered heat exchangers means a periodic fluctuation in the magnitude and the phase of the frequency response and does not mean the resonance used, e.g., in the mechanics [
39,
44].
Turning to the approximation issue, it can be stated based on the results of
Figure 5 that the larger the order of the approximation model, the better the mapping of the original frequency response, together with the above-mentioned “loops” and oscillations. However, in order to correctly map these oscillations, a relatively high order rational model is needed which is able to approximate the high-frequency behavior of the original DPS.
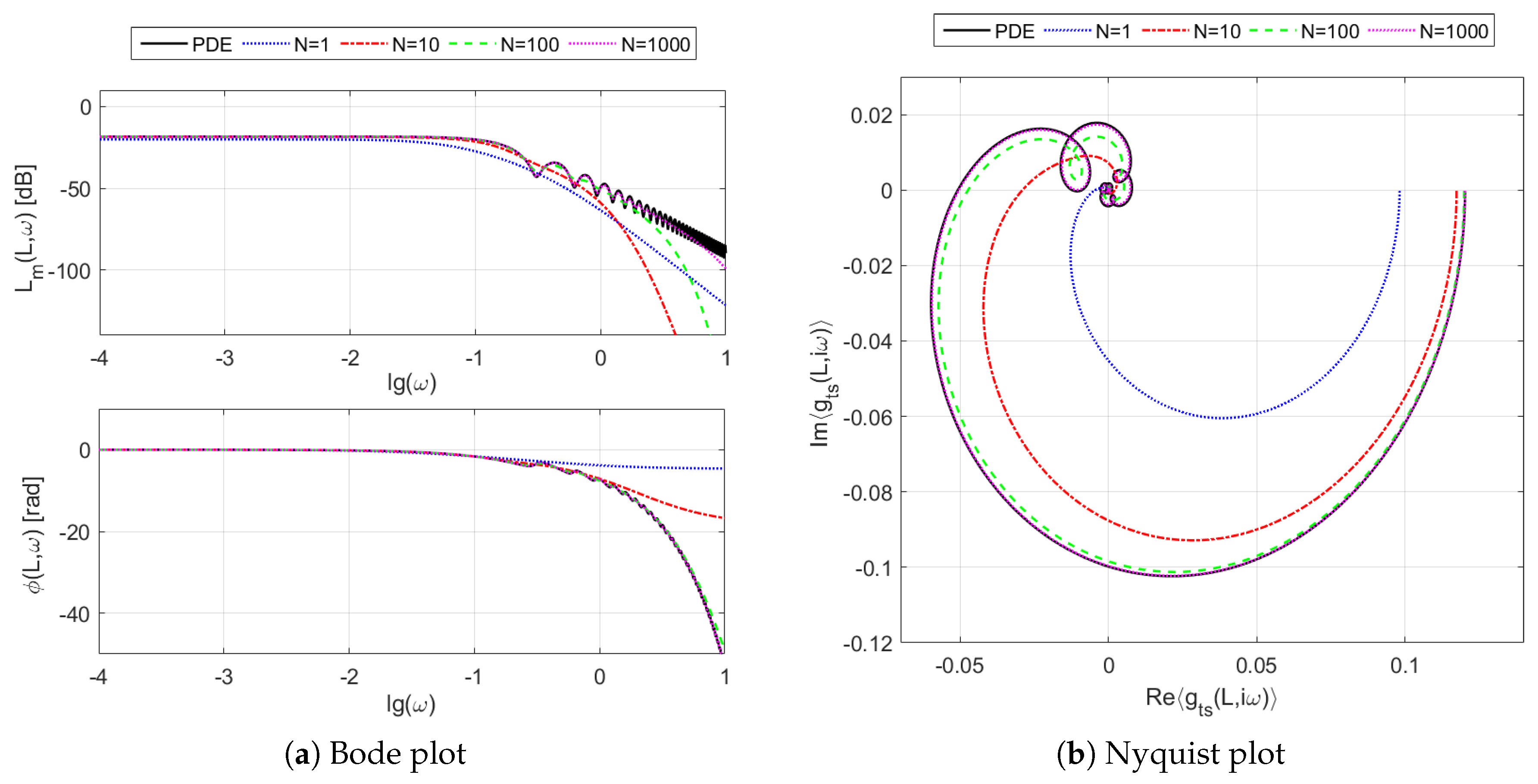
Figure 6 shows the corresponding plots obtained for the transfer function channel
. As one can see here, the approximation models of increasing orders try to fit the frequency responses of the original system. However, due to the dominating time-delay nature of this channel, which results in the original frequency response having no limit at infinity, the approximation task is much more difficult here than in the previous case.
The frequency responses of the two remaining transfer function channels, and , which are not shown here for space saving reasons, are similar, due to the symmetry of the system, to the ones obtained for and , respectively, together with their approximation properties.
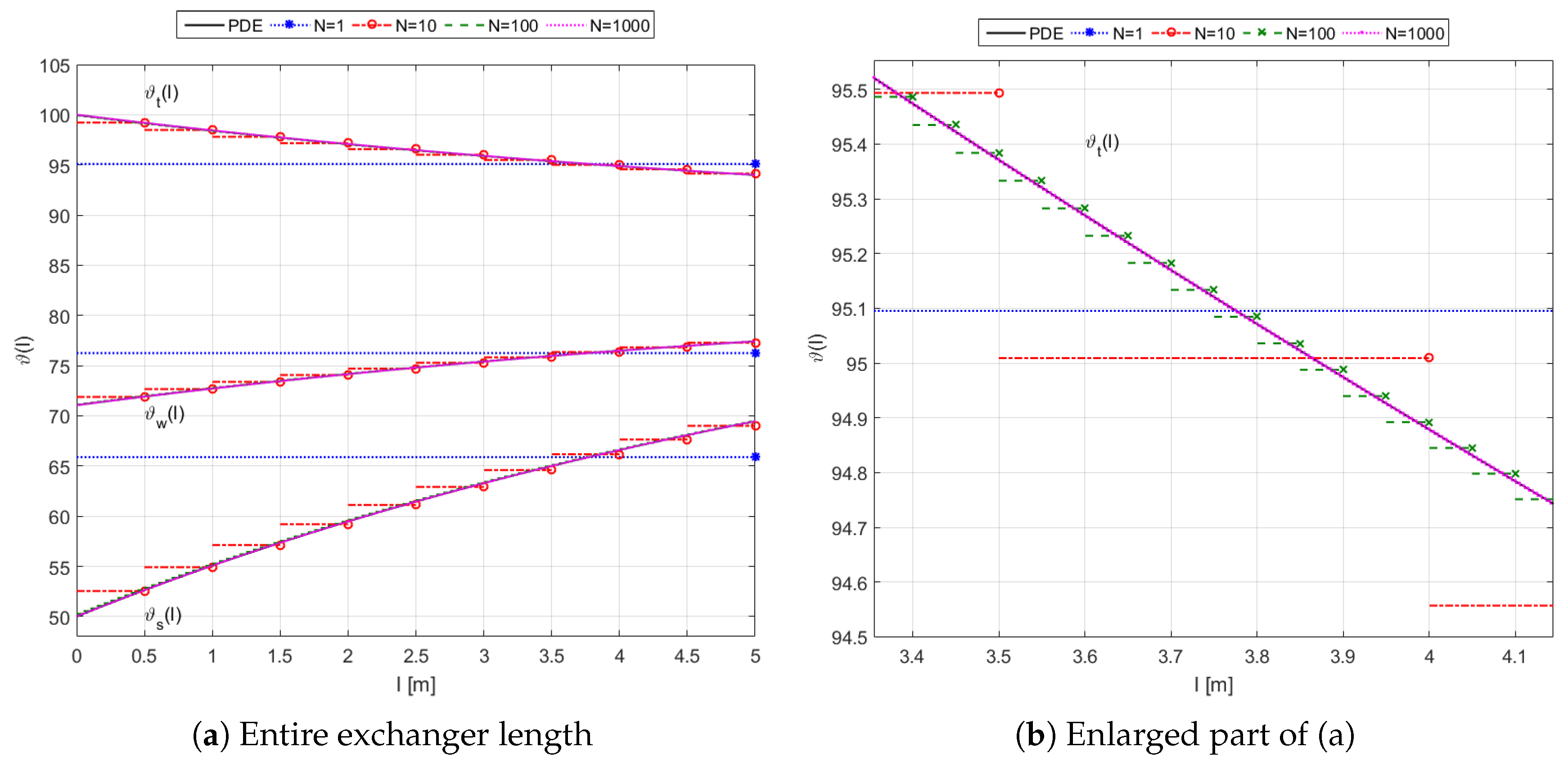
4.2. Steady-State Temperature Distribution
The steady-state temperature profiles of both fluids and the wall were calculated, for the original PDE-based model from Equations (
23)–(
26), and for the approximation model—from their approximate counterparts discussed in
Section 3.3. These profiles obtained for the following constant inlet fluid temperatures:
,
are presented in
Figure 7.
The most important information which can be read from the plot of
Figure 7a is the one about the outlet temperatures of both fluids involved in the heat exchange. In the considered example we have:
for the heating fluid and
for the heated fluid. However, it can be stated that the steady-state temperature distribution of the fluids and the wall obtained for the considered parallel-flow configuration is not so favorable as the one typical of the exchanger working in the counter-flow mode (see [
34]). In the latter case, the outlet temperature of the heated fluid can approach the inlet temperature of the heating one, and the more uniform difference between
and
has an effect of more uniform heat transfer rate. In addition, the uniform temperature difference between the two fluids prevents thermal stresses in the exchanger material.
Turning to the approximation results, it can be read from the plot of
Figure 7a that the larger the value of
N, the better is the mapping of the original steady-state profiles:
,
and
by their approximations:
,
and
, respectively. To show details of the plot for the high-order models, its enlarged part is shown in
Figure 7b.
5. Conclusions and Future Work
In this paper, we presented some results concerning the approximate rational transfer function model for the double-pipe heat exchanger working in the parallel-flow mode. This model can be used, e.g., to perform the controller design for the considered heat exchanger with use of conventional control algorithms, without recourse to complex control algorithms dedicated especially to DPSs. It was shown that within the same dynamical system can exist transfer functions with different approximation properties which strictly depend on the physical phenomena dominating in the given input–output channel. The disadvantage of the presented approach is that the resulting approximation model can be of very high order—even in thousands, as presented in the paper—especially for the channels where transport delay phenomena are dominating. In other words, the resulting rational transfer function model can contain many more parameters as compared to the original irrational transfer function. Therefore, the next step to be performed is to obtain a lower-order model, using the so-called model reduction methods which are able to generate a lower-dimensional approximation of the high-dimensional model while preserving its most important dynamical characteristics. Another option is to use a different approximation approach than the MOL-based strategy presented in the paper, e.g., one of the techniques which have been found effective in the approximation of time-delay systems, such as shift-based approximations or Fourier–Laguerre series.
The quality of the considered approximation models was evaluated in the paper by simple visual comparison of their frequency and steady-state responses with the corresponding responses of the original PDE model. However, in order to perform their quality assessment in a more formal, measurable way, the approximation errors need to be expressed by using, e.g., some of the frequency-domain norms, such as
- or
-norm. In this paper, we adopted the inlet temperatures of both fluids as the input variables of the transfer function model, assuming constant fluid velocities (flow rates). However, in practical applications, often the flow rate of the heating fluid is taken as the control variable in order to stabilize the outlet temperature of the heated fluid. Also the flow rate of the heated fluid can often vary, e.g., due to the variable heat demand. Therefore, development of transfer function models for this flow-forced case, in both irrational and approximate rational forms, would also be very useful. Future work shall also be carried out on developing similar approximate transfer function model for the double-pipe heat exchanger working in the
counter-flow configuration which is usually preferred. Finally, an important task still to be performed is the experimental validation of the considered models using, e.g., the laboratory setup presented in
Figure 1, which should include both parallel- and counter-flow configurations.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






