1. Introduction
Transmission line equation is the other name known for the classical telegraph equation (TE) due to the reason of its origination because of the connection amongst voltage and the current waves on the transferral line. The common diffusion circumstance is explained well such an equation. However, in case of finite long transmits procedure, when the situation of abnormal diffusion happens (in presence of voltage wave or current wave), the classical TE does not completely explain well. FTE works well in such type of scenarios. Cascaval et al. [
1] analysed FTE happens to facilitate in improved understanding of diffusion process present in blood flow investigations. The FTE has been used into the modeling of reaction dissemination, signal analysis for transference, random walk of suspension flow, propagation of electrical signals etc.
Consider the nonlinear time fractional telegraph equation (FTE) [
2]
with initial conditions
where
,
g are a constant and suitable prescribed function of
s and
t respectively.
are real constants.
,
denote fractional derivative and bounded domain in real functions. Furthermore,
,
are Caputo fractional derivatives (CFD) and
. The CFD [
3] is interpreted as follows:
where
is the Euler’s Gamma function. The CFD allows traditional initial and boundary conditions to be involved in the formula of the modeled problem. Here, the CFD of a constant equals to zero [
4,
5].
Several numerical and analytical techniques have been developed to solve FTE. The Adomian decomposition method has been proposed for the analytical solution of FTE by Momani [
6]. In this article fractional derivatives have been used in Caputo sence. Yildirim [
7] investigated He’s homotopy technique for the solution of space-time FTE. The analytical solution has been calculated in the form of series solutions. Das et al. [
8] presented an analytical solution of time FTE using homotopy analysis method. A linear time FTE has been solved by Li and Cao [
9] via finite difference (FD) algorithm. Galerkin mixed finite element technique for the solution of time FTE has been proposed by Wang [
10]. A combination of Sumudu variational and iteration technique for solving FTE has been proposed by Alkahtani et al. [
11]. Asgari et al. [
12] solved time FTE using Bernstein ploynomials operational matrices. A combined method of a group preserving technique and the technique of line with CFD has been proposed by Hashemi and Baleanu [
13]. A collocation technique based on radial basis function for the numerical solution of nonlinear time FTE has been proposed by Sepehrian and Shamohammadi [
2]. Wang et al. [
14] discussed the reproducing kernel space algorithm with CFD for solving time FTE numerically. Wang and Mei [
15] presented a Legendre spectral Galerkin technique and generalized FD technique for solving time FTE. Liu [
16] presented difference approximations for solving time FTE via Grünwald formula and CFD.
B-splines functions have adaptability to estimate the solution with high order precision at any point in the domain. These basis functions have been used to obtain the solution of fractional differential equations (FDEs). Several researchers have been utilized B-splines to obtain the solution of FDEs but only short number of studies for the FTE. Furthermore, so far as we realise there is no such research on the use of B-spline for solving non-linear telegraph equation. Esen and Tasbozan [
17] solved the fractional Burgers equation using quadratic B-spline Galerkin approach. Sayevand et al. [
18] discussed a numerical technique for fractional diffusion problems via cubic B-spline (CBS). Pitolli [
19] presented the solutions of the Predator-Prey models using fractional B-spline technique. The FD algorithm via extended cubic B-spline (ECBS) has been proposed for the time fractional advection diffusion model by Mohyud-Din et al. [
20]. Ghalomian and Nadjafi [
21] presented the solution of integro-differential model using CBS approach. Akram et al. [
22,
23,
24] developed numerical techniques for the linear time fractional telegraph model and fractional diffusion models via ECBS functions and CFD. Khalid et al. [
25] discussed time fractional Allen–Cahn model using redefine CBS functions.
The collocation method with B-splines functions is shown to provide good results for FDEs. The main advantage of this method is that the obtained solution will be in approximate analytical form. Then the numerical solution can be established from the approximate analytical solution at any discrete point.
This paper is organised as follows: In
Section 2, a modified basis function is introduced. In
Section 3, a MECBS, Crank–Nicolson method and Caputo’s derivative are applied to solve nonlinear FTE.
Section 4 and
Section 5 are devoted to stability analysis and convergence analysis. In
Section 6, numerical examples are illustrated. Finally conclusion is demonstrated in
Section 7.
2. Modified Basis Function
Consider
be a equally spaced partitioning of a finite domain with
. Therefore, supposed interval is arranged into
M equal subintervals at the nodes as
, where
h is a step size. The ECBS functions [
26] at the
over the assumed interval is presented as follows;
where
,
is a free parameter in the closed interval
and
is a variable. For
, the CBS and ECBS basis hold same properties such as convex hull, symmetry, geometrical invariability. The CBS and ECBS basis functions are numerically stable due to the convex hull and symmetry properties. The ECBS transforms into CBS for
. For a smooth function
there is a unique
, that assures the determined conditions, such that
where time dependent unknown coefficients
’s are carried out by some specific restrictions. The ECBS functions (
4) and Equation (
5) produce the following relations
In this article, the modified basis function are defined as follows
The ECBS functions are modified in this way that the diagonally dominance property is hold [
27]. Now approximated solution of modified basis is described as follows
3. Derivation of the Method
In this part, we develop the numerical technique to solve the nonlinear time FTE using CFD. Take uniform partition of time interval as
with
,
. The discretization of
and
in CFD form [
28] are described as follows
where
. The truncation error
is given in [
29] as
Remark 1. For , the given telegraph model becomes first order in time direction. Therefore always .
And
where
. The truncation error of first order
is defined in [
30] as
where
C and
are constants.
The
,
satisfy the following conditions
Using
weighted technique and Equations (
11) and (
13) in Equation (
1), we obtain
It is perceived that the
will arise for
, where
. The central difference formula is used to obtain this term:
Nonlinear term is linearized [
31] as follow
here, if we choose
and 1, the above equation gives explicit, Crank–Nicolson and implicit method. Substituting
in (
15), we obtain Crank–Nicolson scheme as follows:
where
. Using (
16), (
17) in (
18), we have
Using (
10) in the above equation, for
we have
The above system have
, we can solve it uniquely. In order to begin the iteration on the above system, it is mandatory to obtain the initial vector, for this we will utilize initial conditions
The above system (
19) can be written as
where
. It is clearly observed that for
the matrix
A is strictly diagonally dominant. Therefore invertible by Gershgorin’s theorem [
32]. Therefore, the above system cab be solved easily by Wolfram Mathematica 12.
4. Stability Analysis
The idea of stability is related to the errors of computational method do not grow as the execution continues. We will employ Von Neumann technique to examine the stability analysis. Let
represents the growth factor in the form of Fourier mode and suppose
be the computed value. Therefore the error
at
mth time level is defined as
Consider the linearization [
31] of (
18) as
, we have the following error equation:
Suppose the modified basis difference equation in one Fourier mode as
where
,
,
,
h are the mode number, the Fourier coefficient and the element size respectively, then the expression (
20) takes the form
Using the basis function, Equation (
21) reduces to
Divide (
22) by
and incorporating the terms, we attain
Throughout divide by
, we achieve
where
for all
.
Proposition 1. If be the solution of (23), then . Proof. We determine this results by mathematical induction. Using in expression (23), we get Suppose that for
,
is true then we have
Hence , in order that . Consequently, The MECBS technique for model problem is unconditionally stable. □
6. Numerical Implementation
We will go through some numerical experiments for the MECBS method in this part. The theoretical claims are checked by error norms. All numerical tests are done in Mathematica. The norms
and
between numerical results and analytical results are determined as
The following formulation can be utilized to determine the order of convergence numerically [
20]:
where
and
are the maximum errors at partitioning
and
respectively.
Example 1. The following FTE takes into consideration withwhere and analytical solution is [2]. In
Table 1 comparison of
, RMSE are presented for various values of
M,
,
at
.
Table 2 shows the comparison of RMSE given by Sepehrian and Shamohammadi [
2] for
,
and various values of
. The CPU time is also presented. In
Table 3,
,
, RMSE and rate of convergence are presented for
,
at
.
Table 4 demonstrates the errors and rate of convergence for various values of
M.
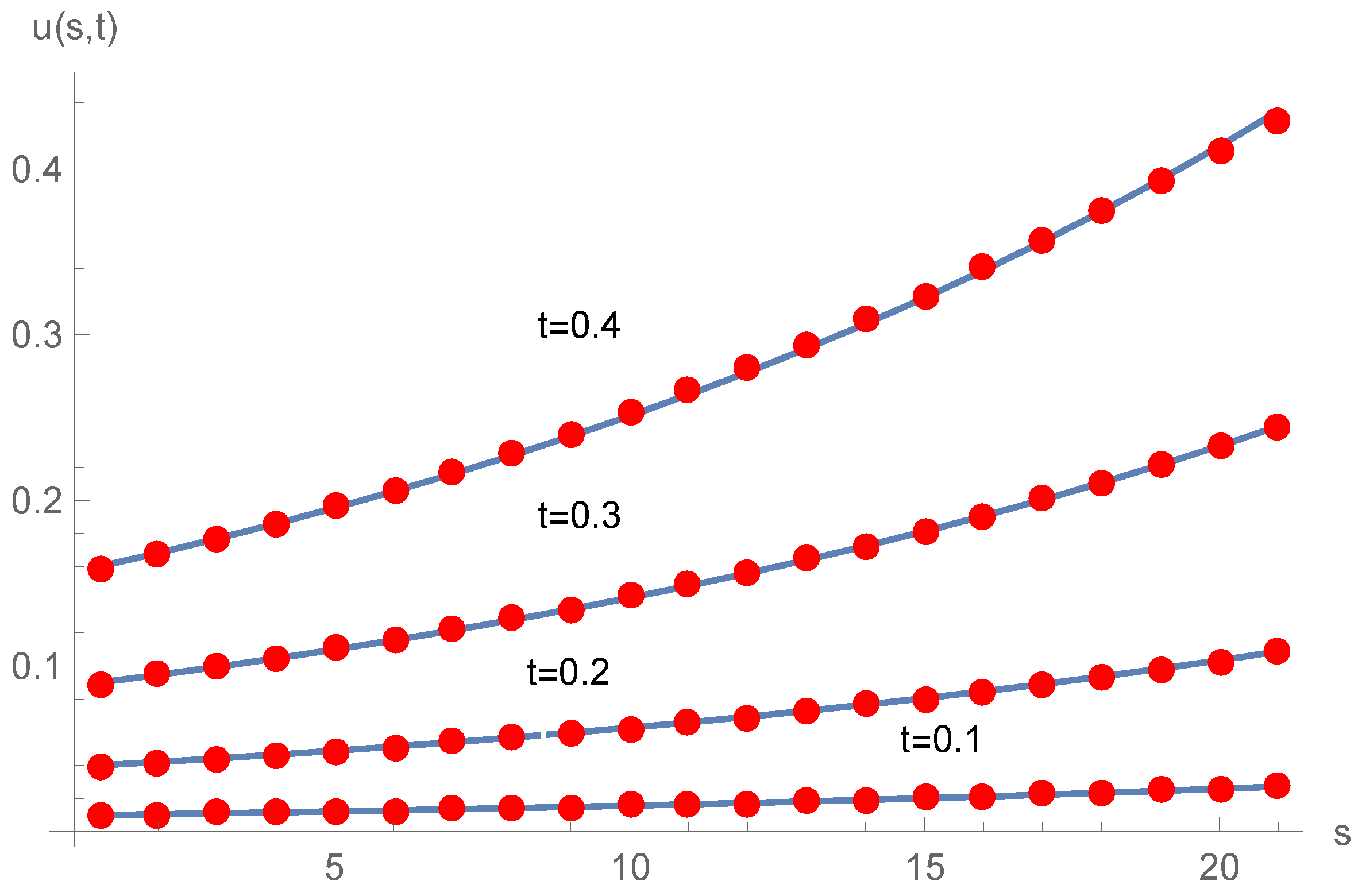
Figure 1 illustrates the graph of numerical and exact values for time levels
,
,
and
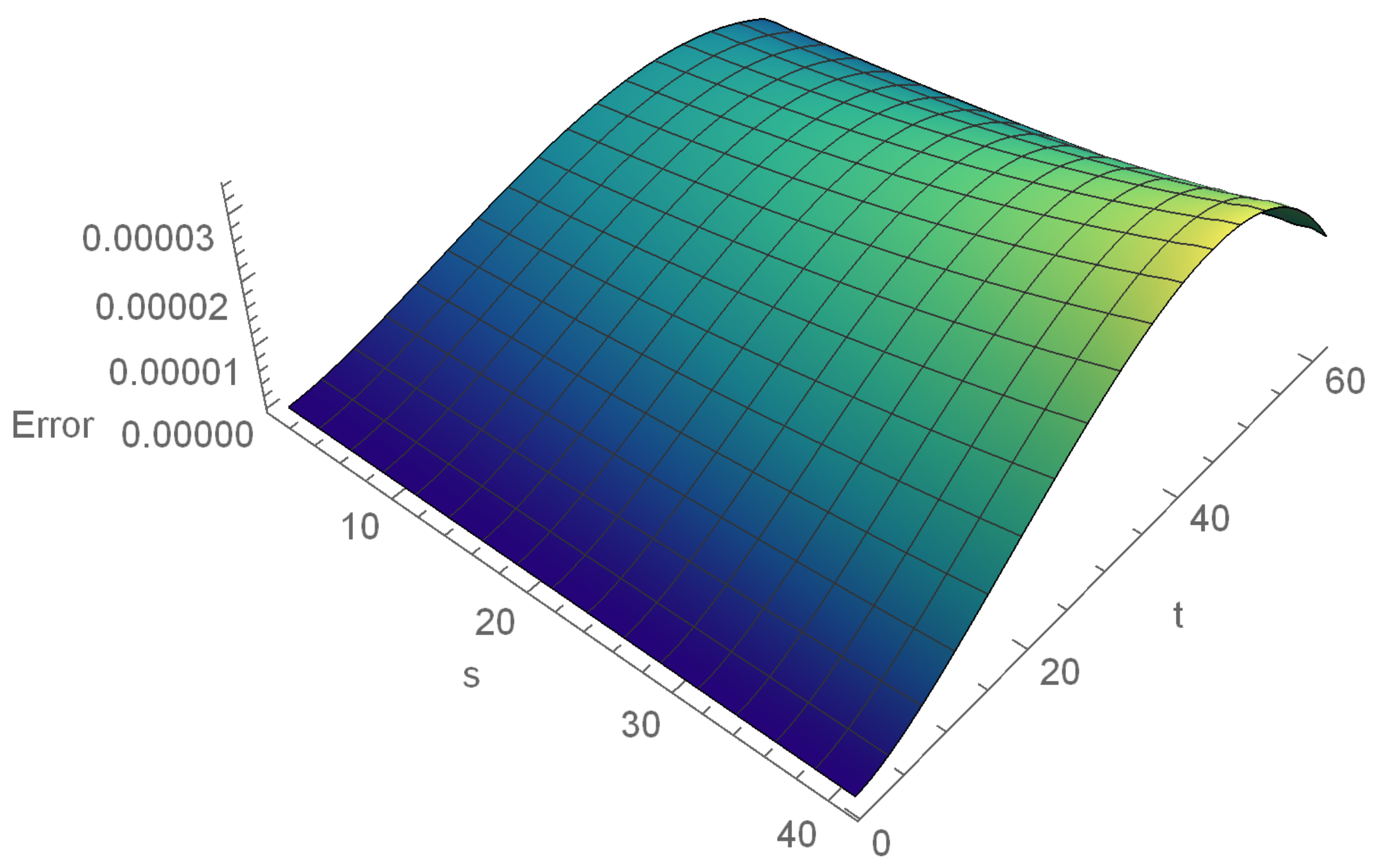
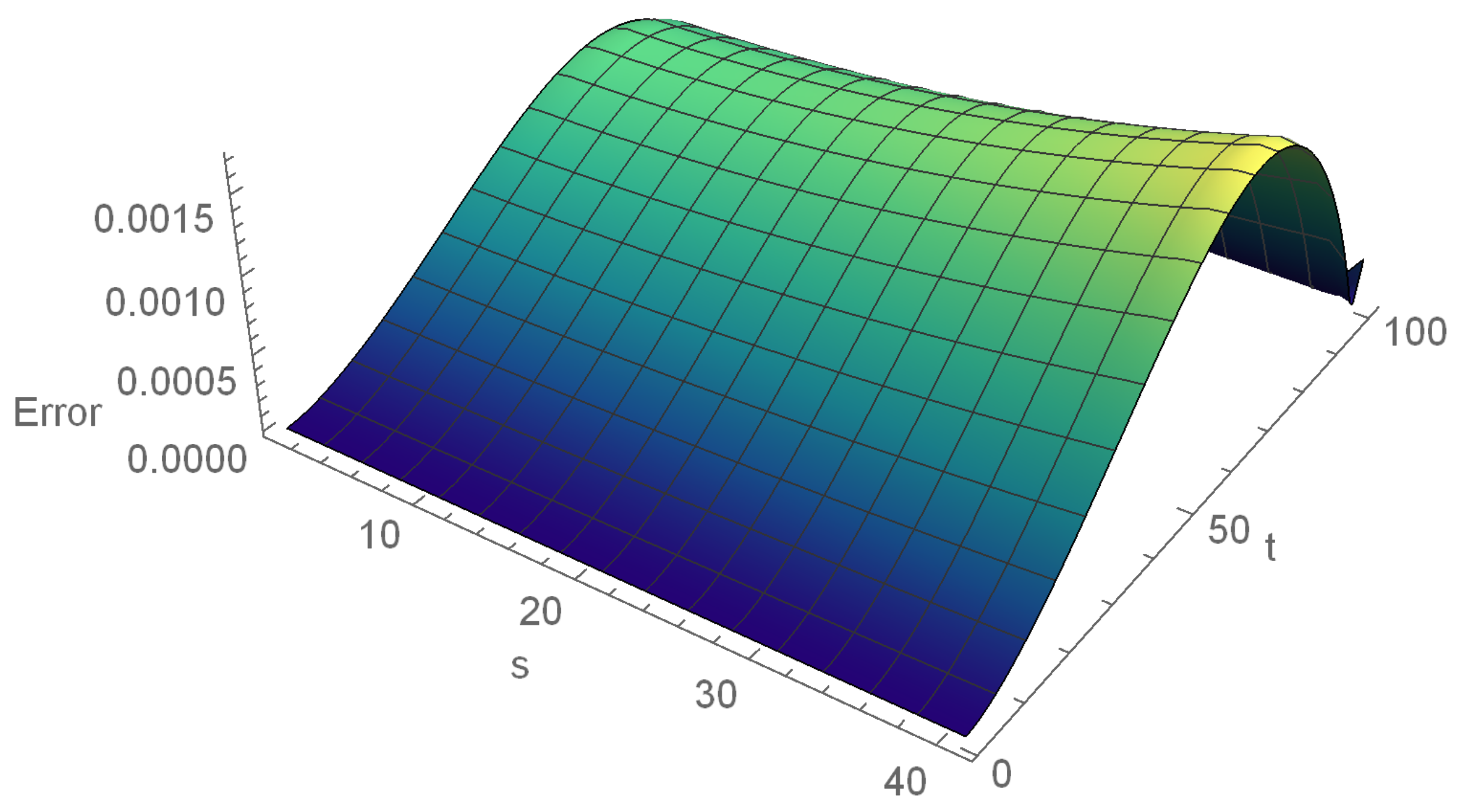
. Error graph for
,
, at
is plotted in
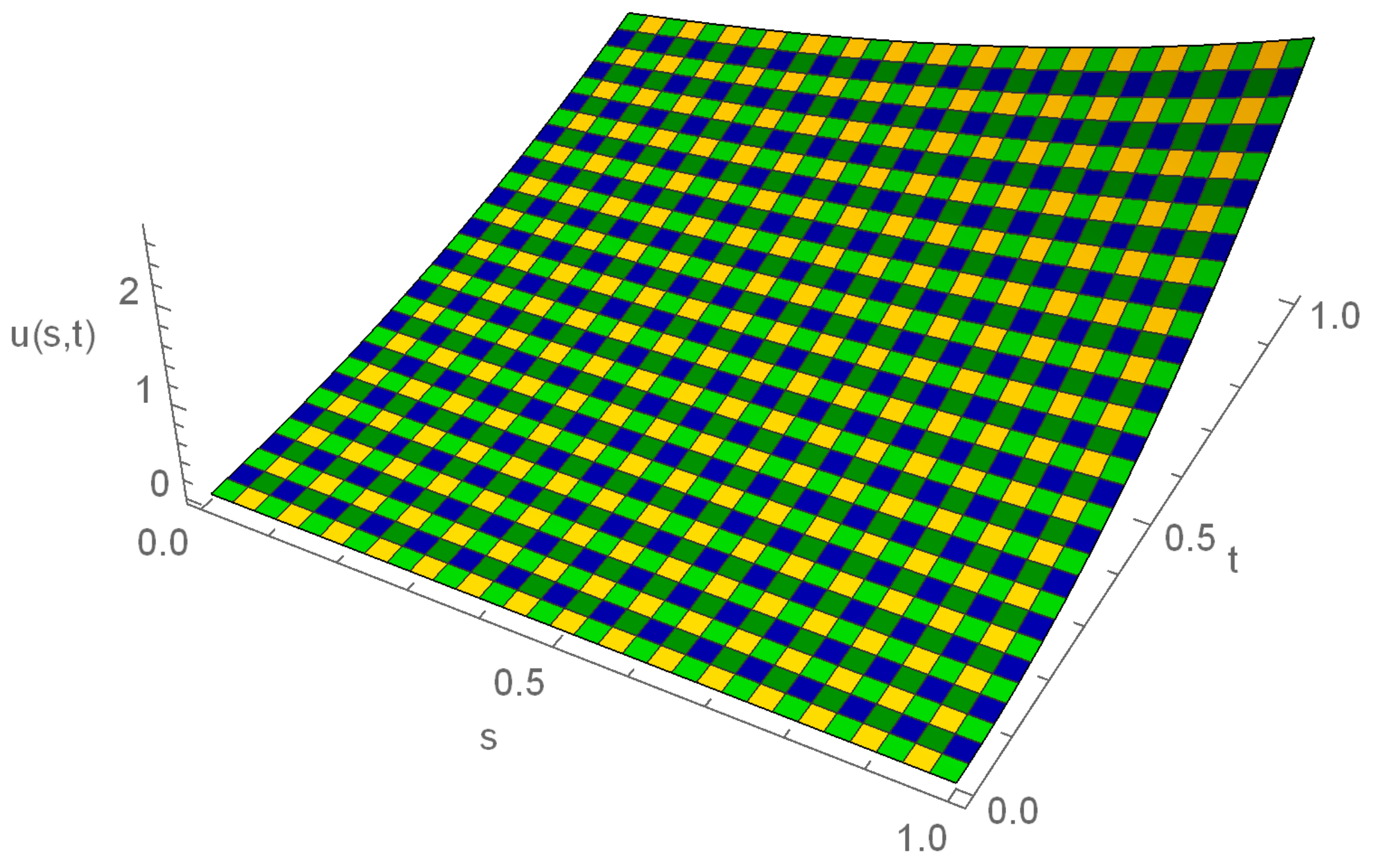
Figure 2. Numerical solutions given by MECBS is plotted in
Figure 3 corresponding
and
.
Example 2. The following form of FTEwithwhere and analytical solution is [2]. Table 5 presents the comparison of
and RMSE with CPU time for
,
and various values of
at
. In
Table 6,
,
, RMSE and rate of convergence are given for several values of
,
,
at
.
Table 7 and
Table 8 demonstrate that the numerical outcomes and exact values for
,
,
and
at several knots.
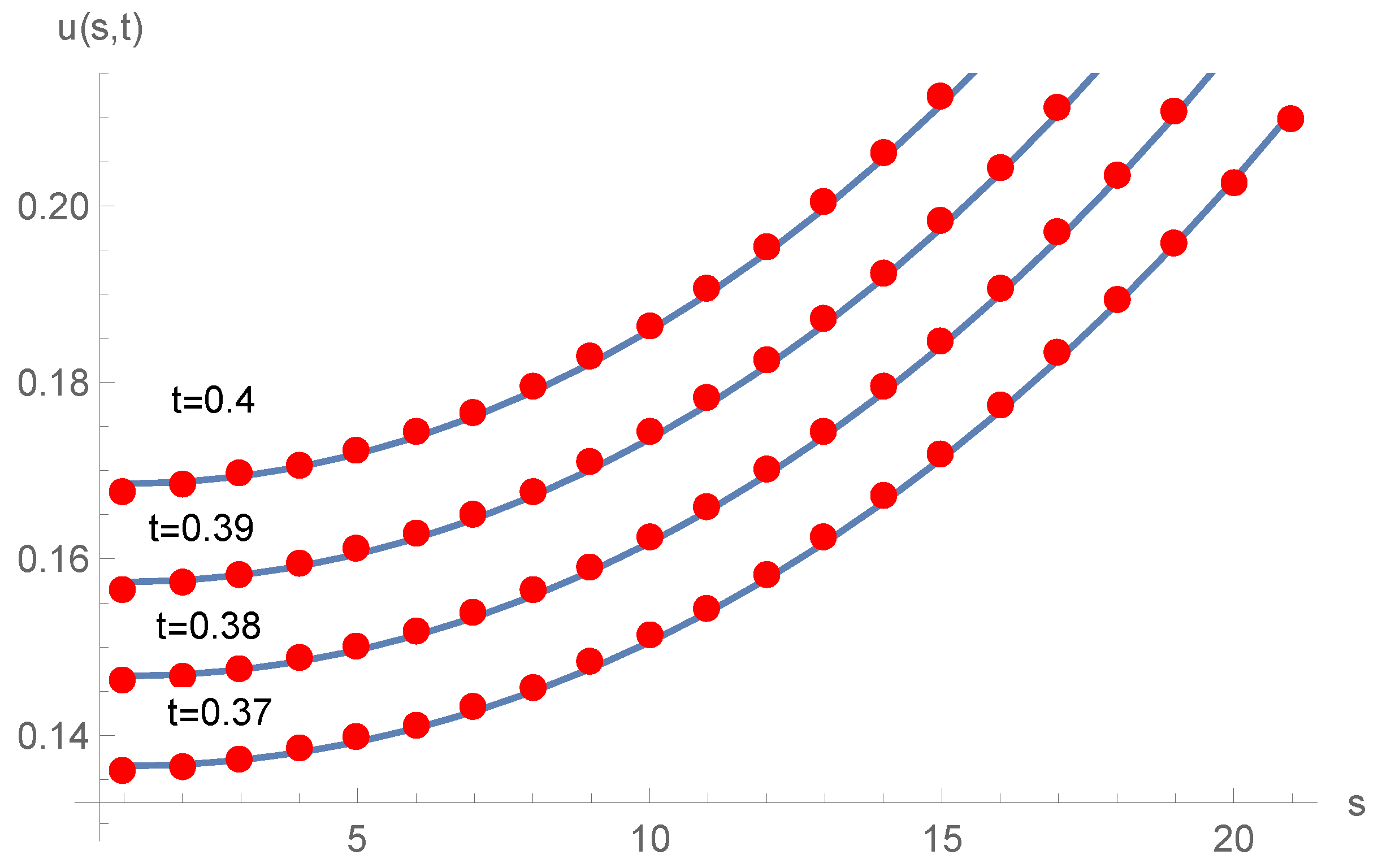
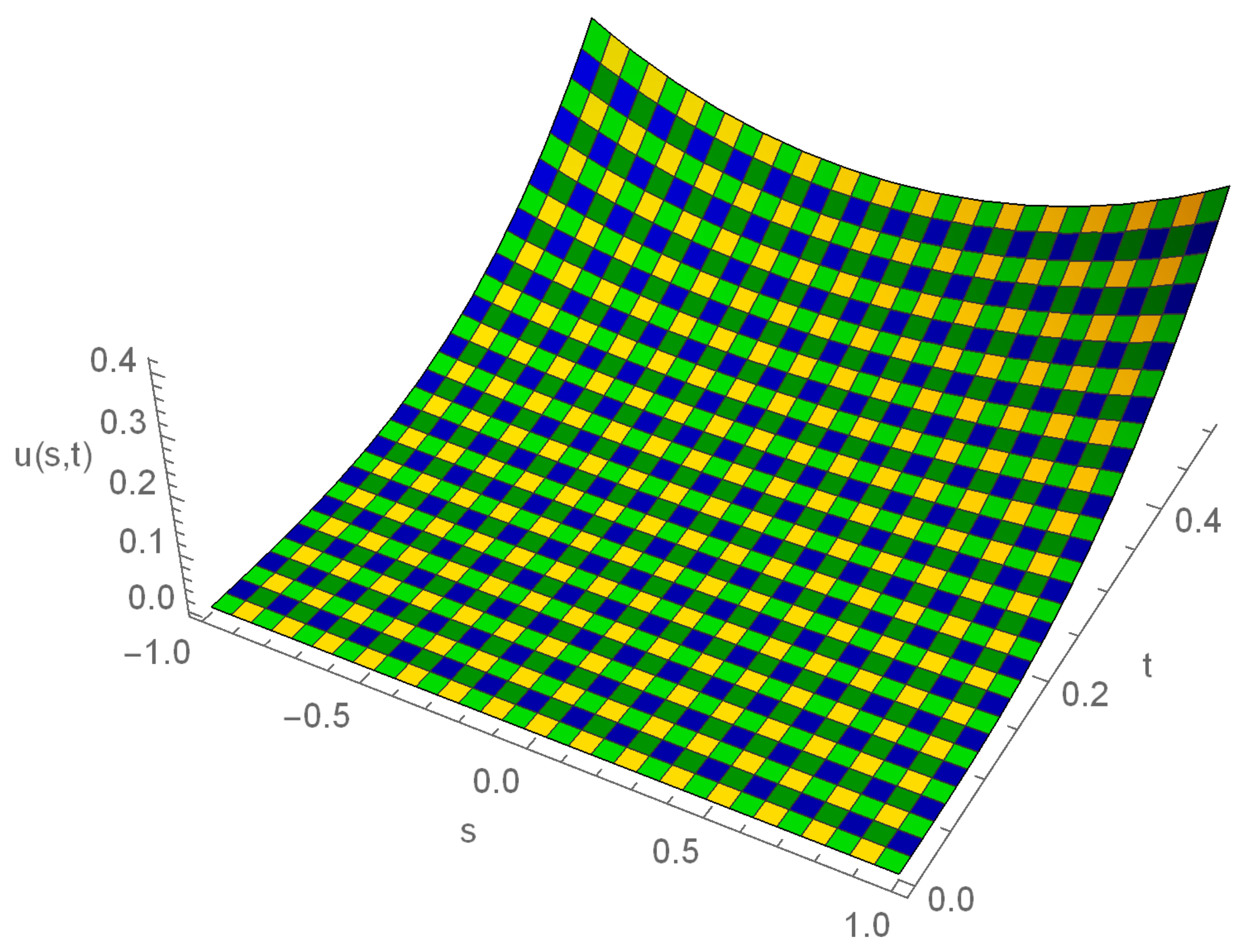
Figure 4 shows the computational outcomes and exact solutions for various time steps.
Figure 5 and
Figure 6 depict the error plot and space-time graph of Example 2 at
and
respectively.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}