Trajectory Planning for Mechanical Systems Based on Time-Reversal Symmetry

 , , ,
, , ,  ,
,
Abstract
1. Introduction
Background to the Study
2. Materials and Methods
2.1. Motivational Case Study: Mass-Spring-Damper Model
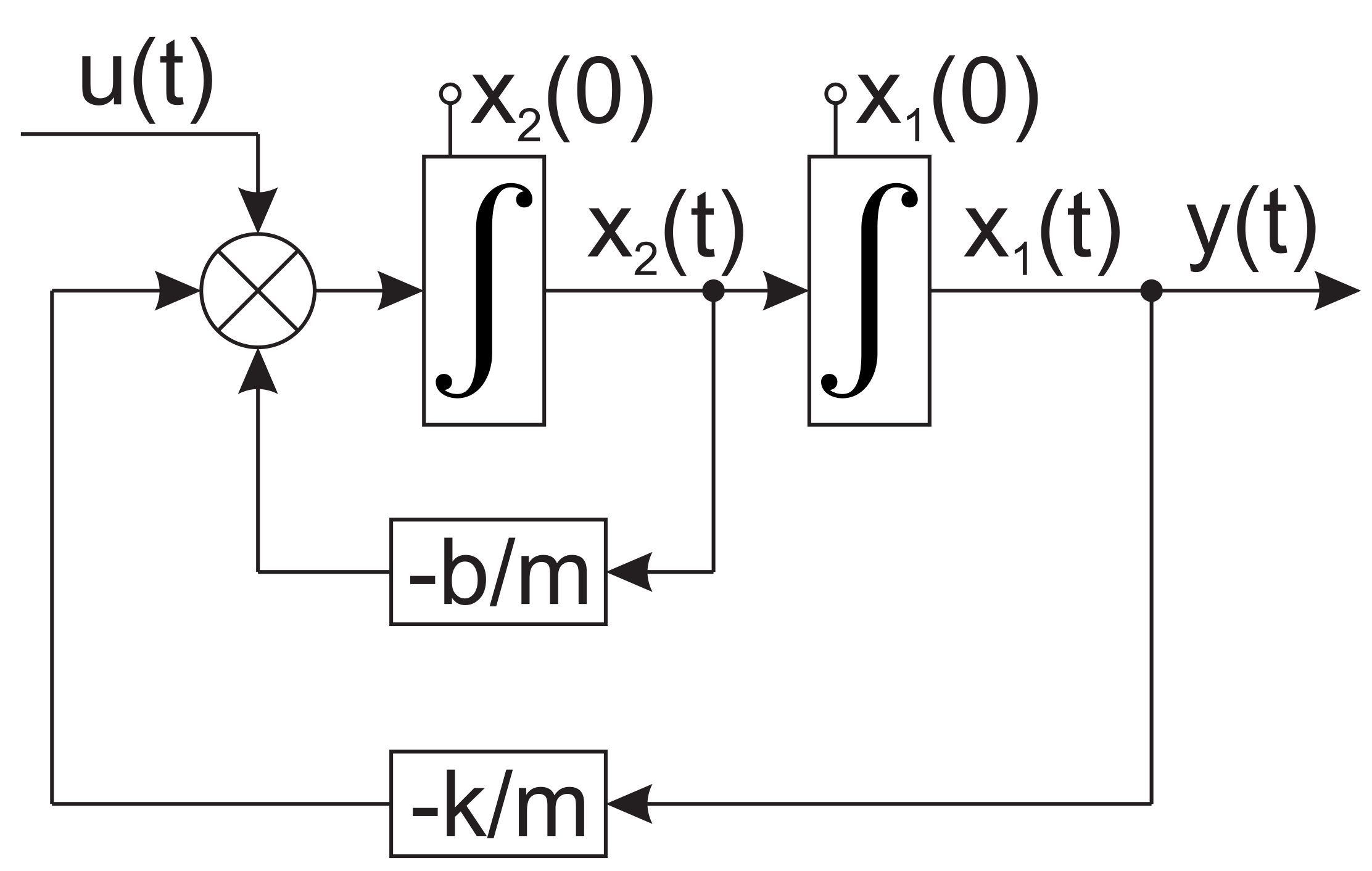
2.1.1. State-Space Description of Mass-Spring-Damper Model
2.1.2. Trajectory Planning for Mass-Spring-Damper Model
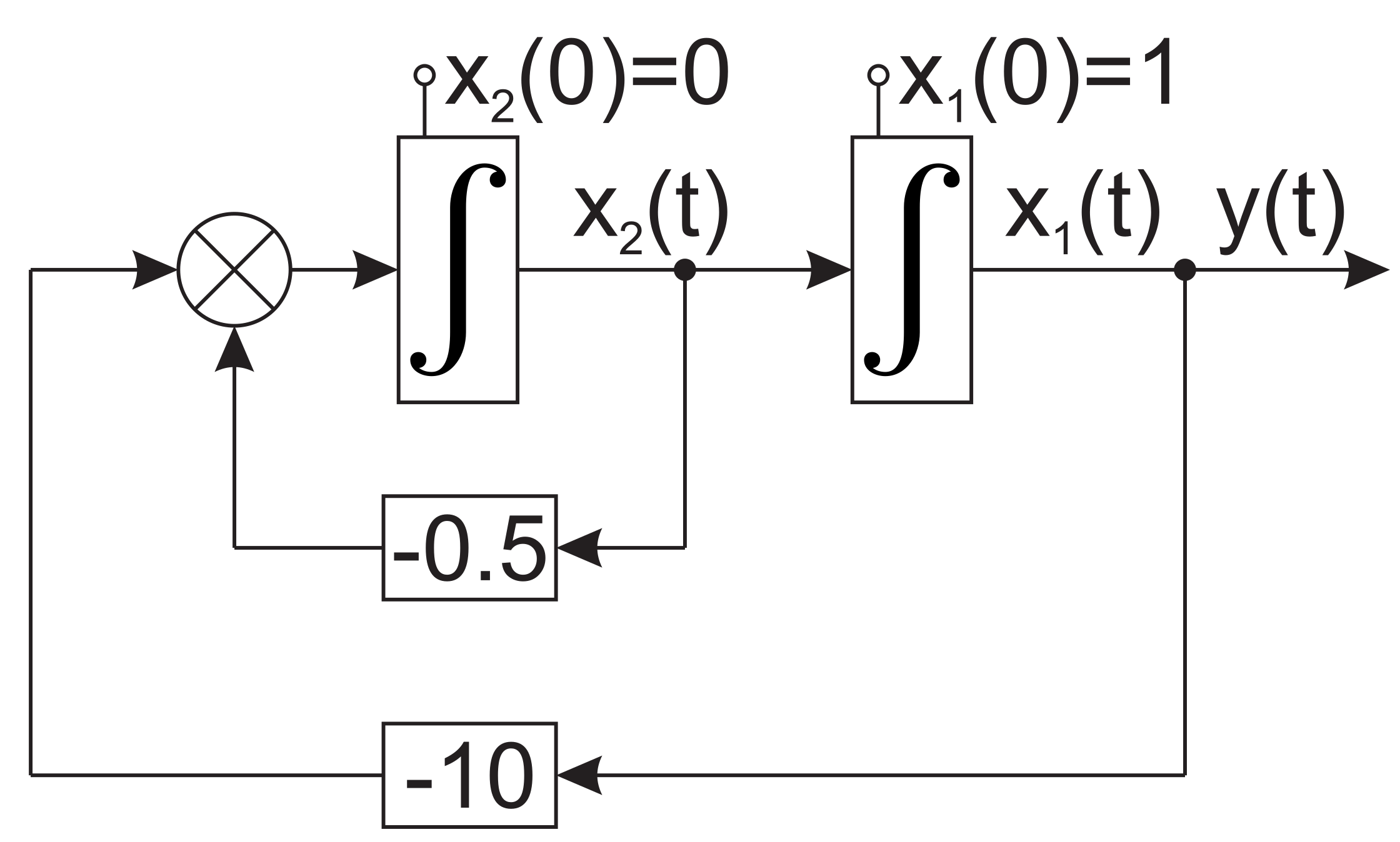
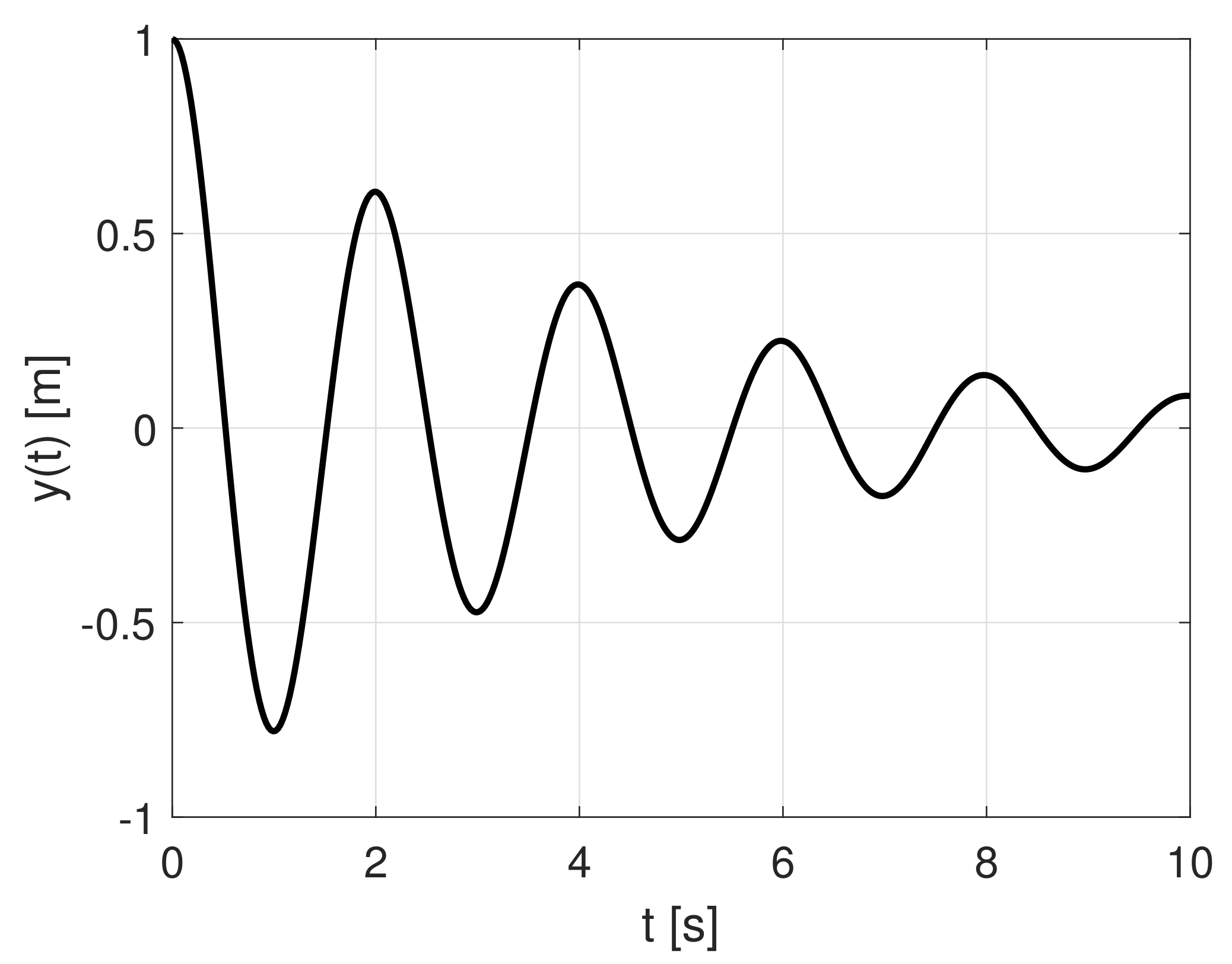
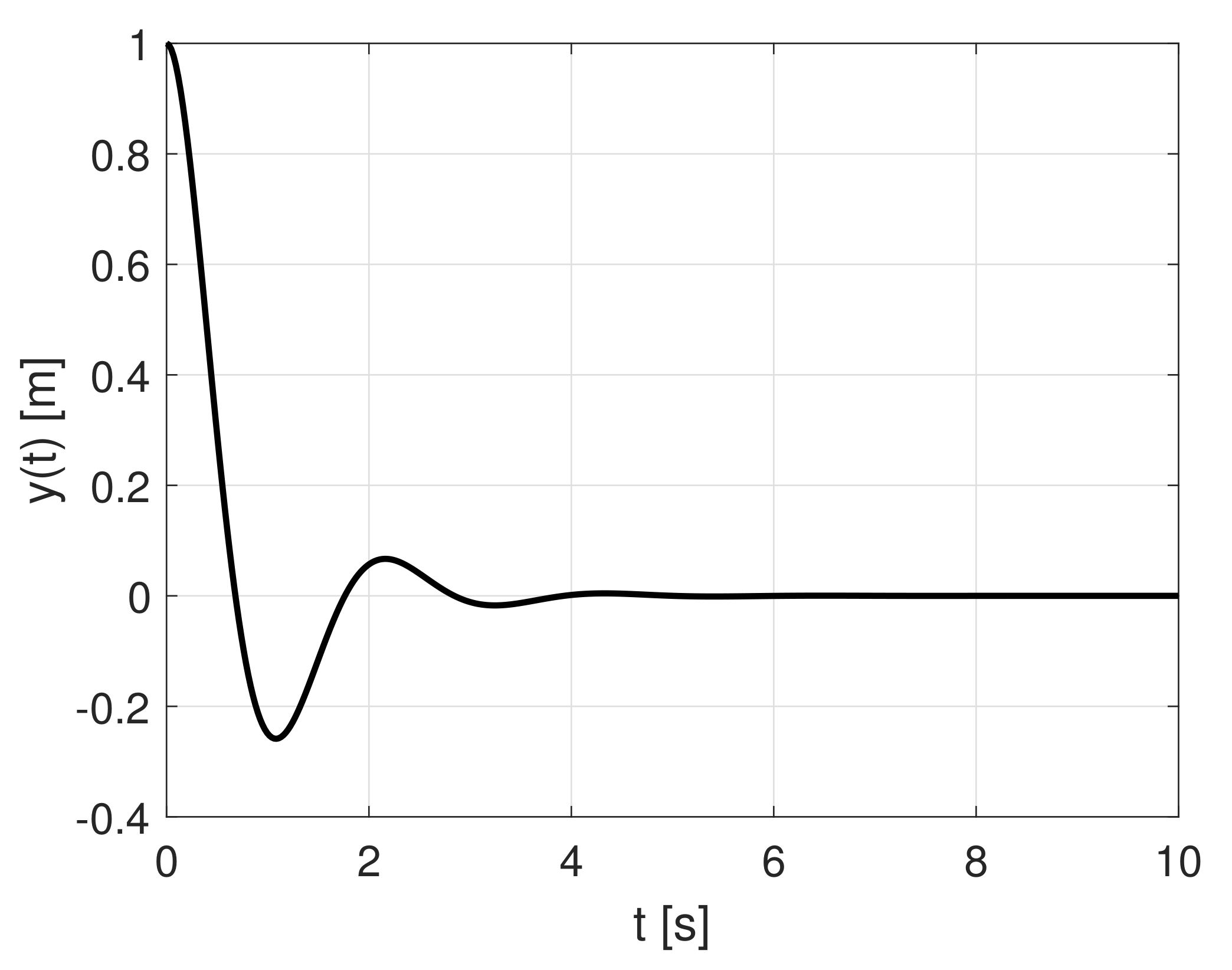
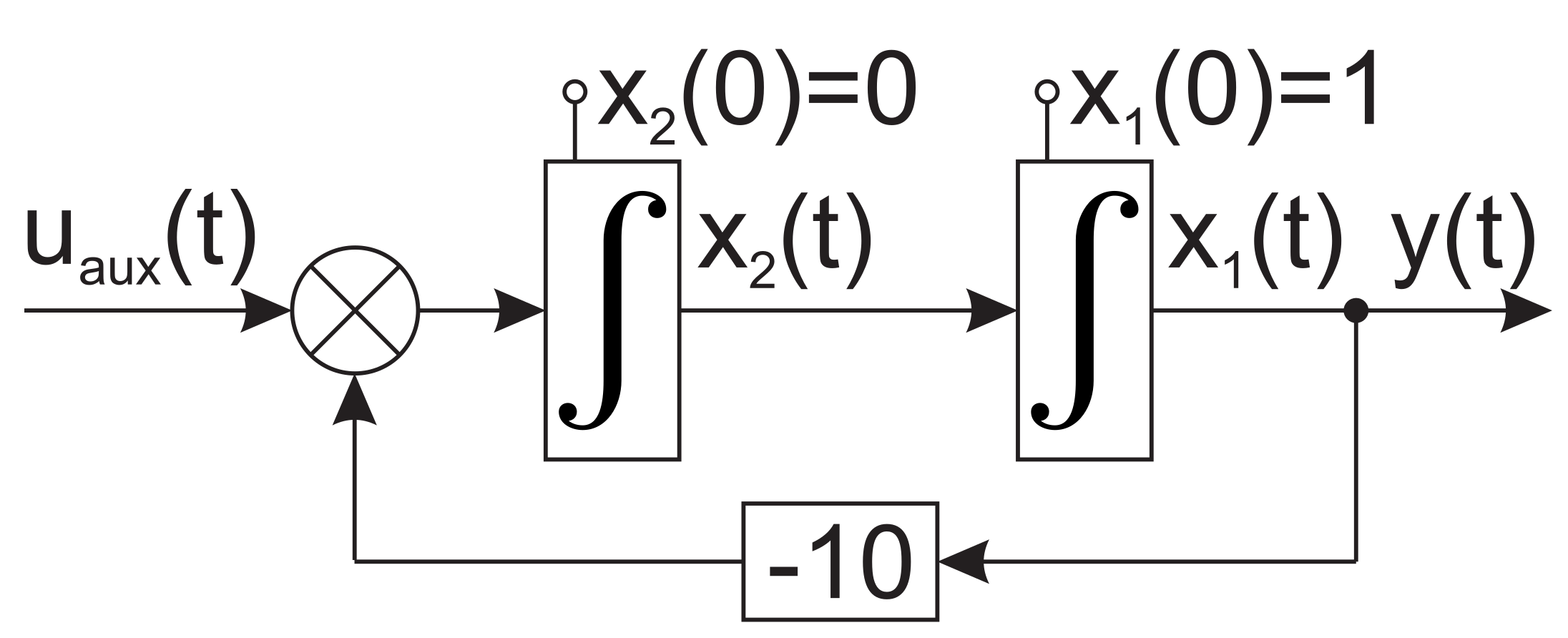
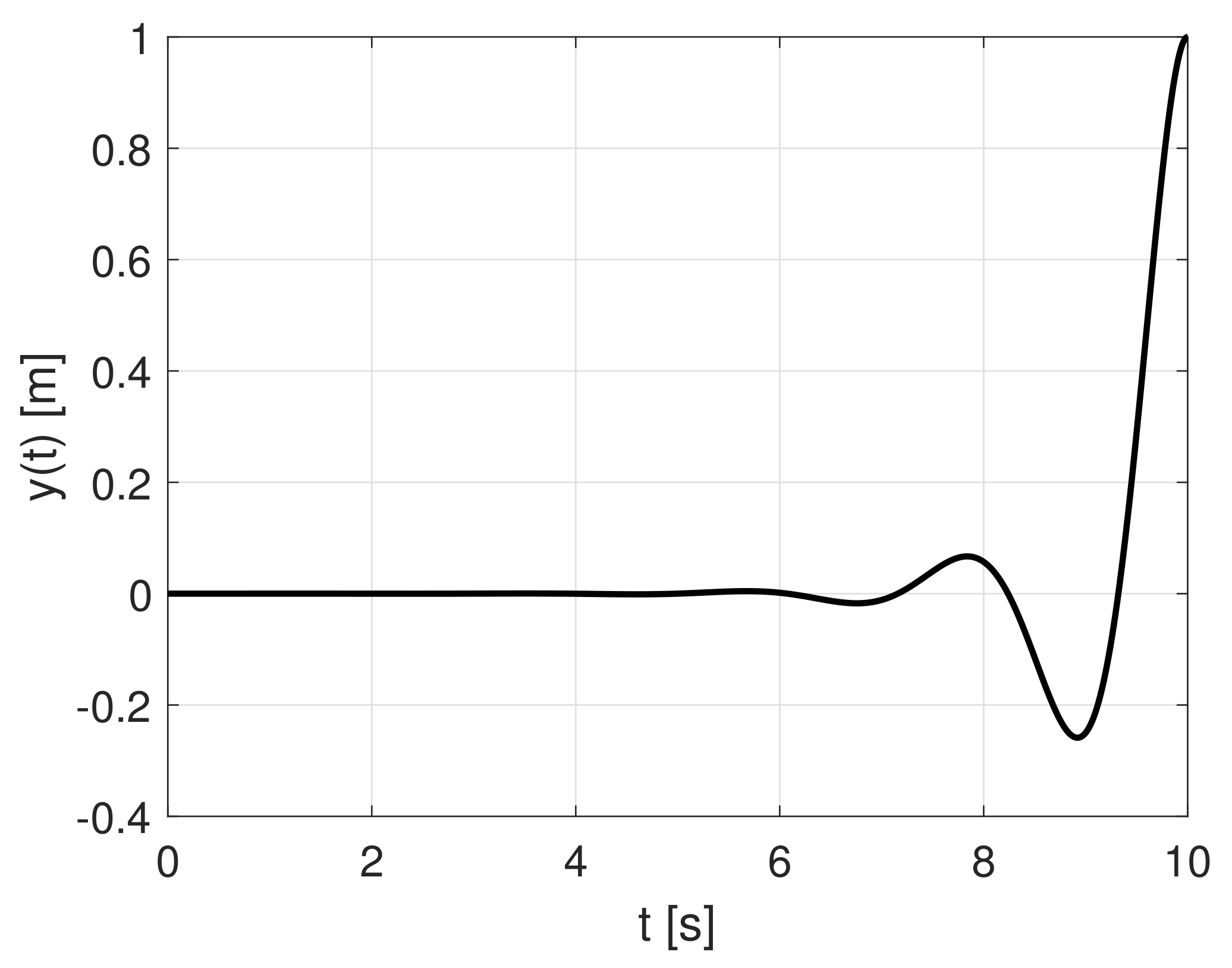
- Obtaining a response to initial conditions , whose values correspond to the predefined final state , are supposed to reach at time by application of so far unknown control signal brought to the input of the system according to Figure 2. Note that the input is absent at the moment. Resulting waveform is depicted in Figure 3.
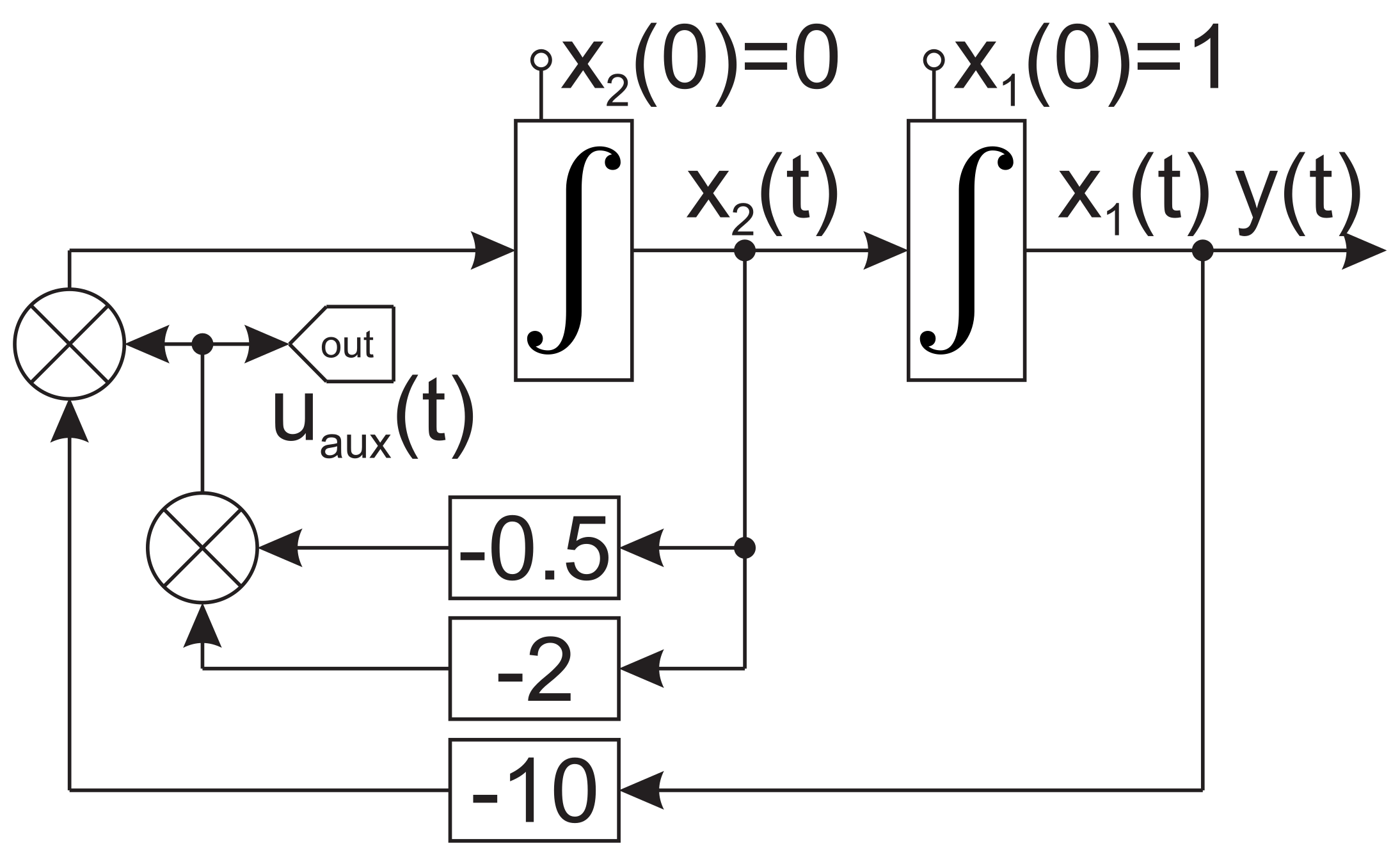
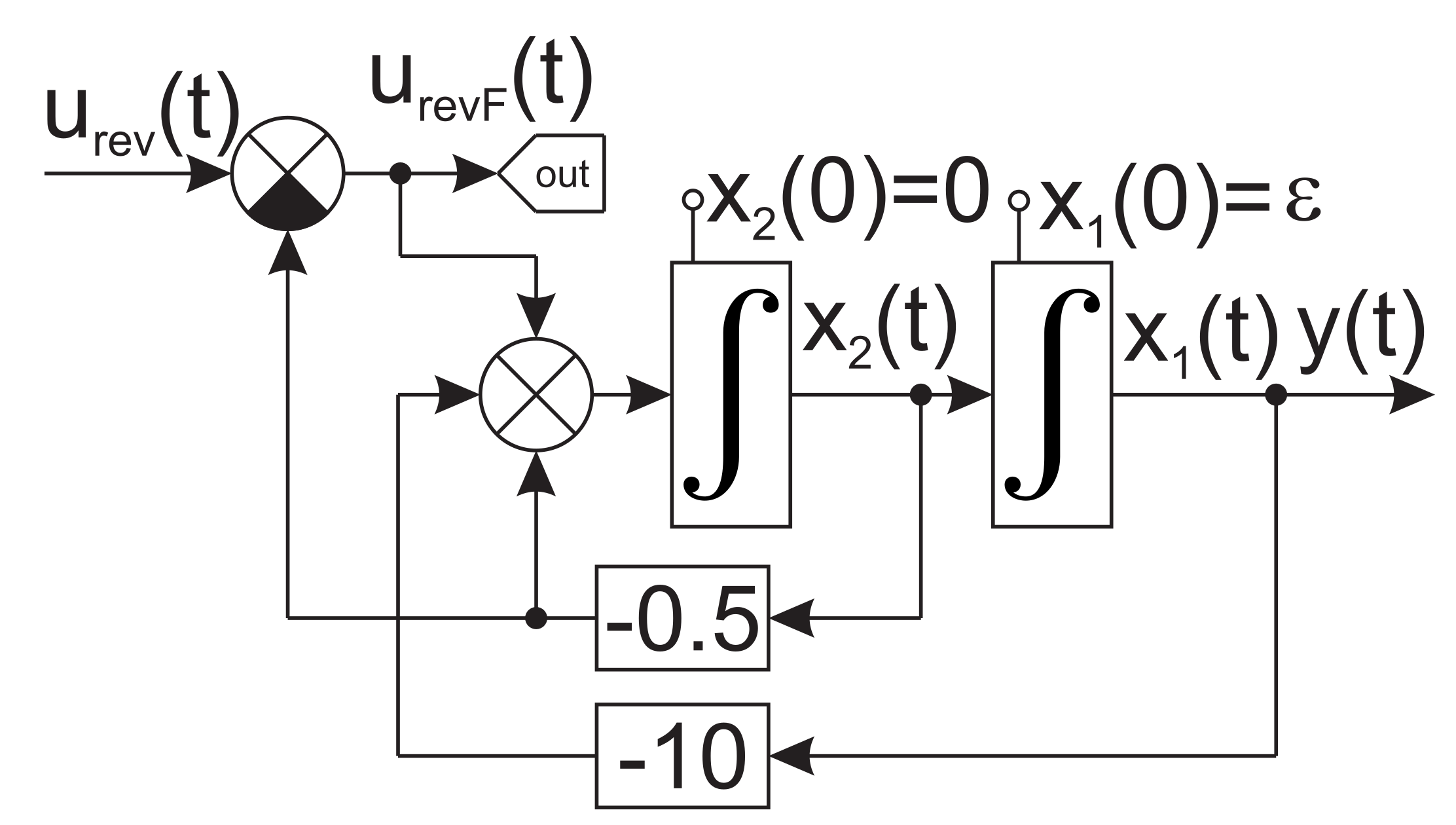
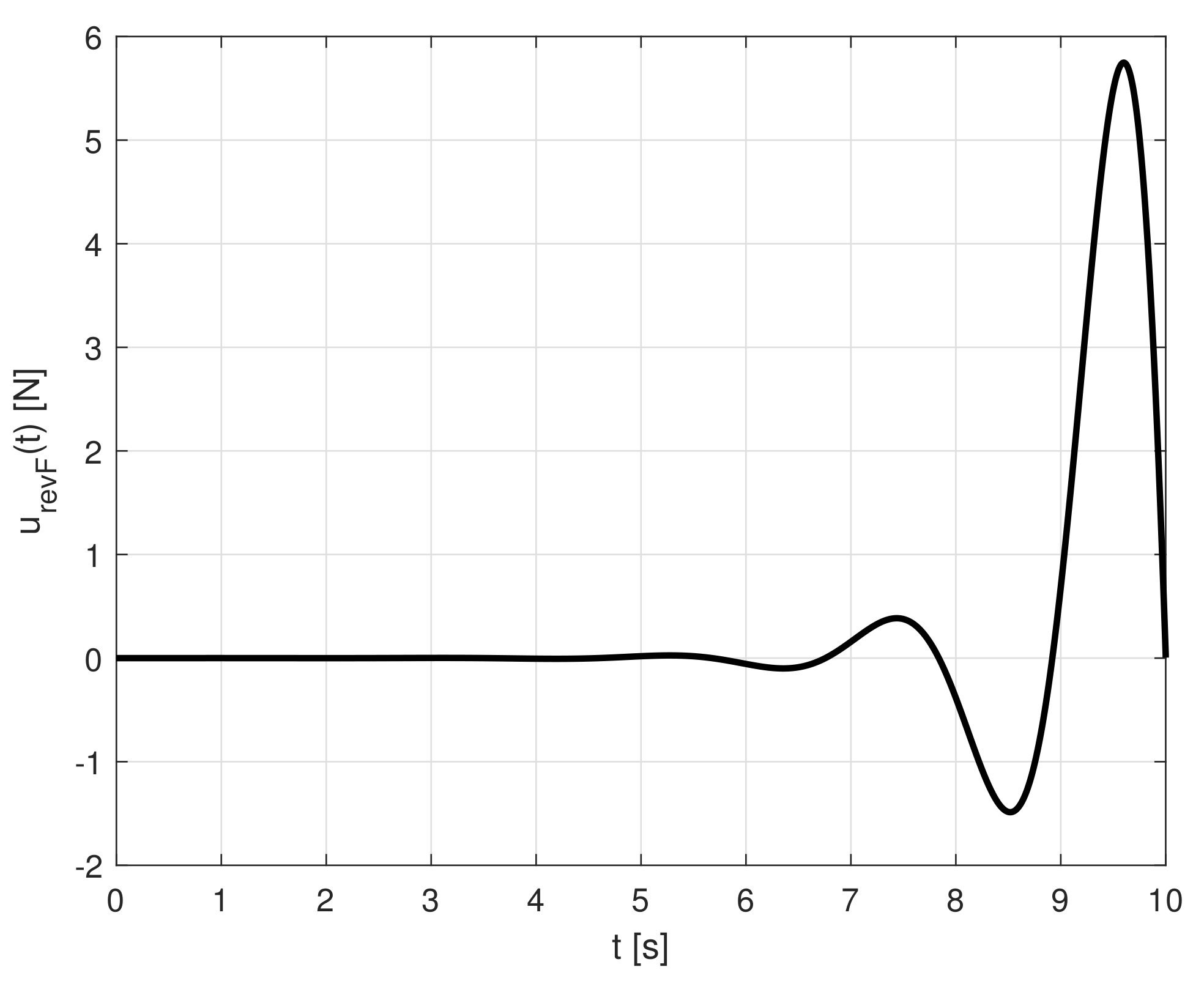
- As the output signal shown in Figure 3 is too oscillatory to represent a good candidate for a trajectory, the scheme depicted in Figure 2 is modified by adding an artificial damping to the system and stores the signal referred to as is provided, where . The value of the damping parameter was adjusted to keep the stability of the system and obtain the sufficient system’s response in time and frequency domains. This modified scheme is depicted in Figure 4 and its simulation leads to the waveform shown in Figure 5 which is now considered as an appropriate candidate for a state trajectory.
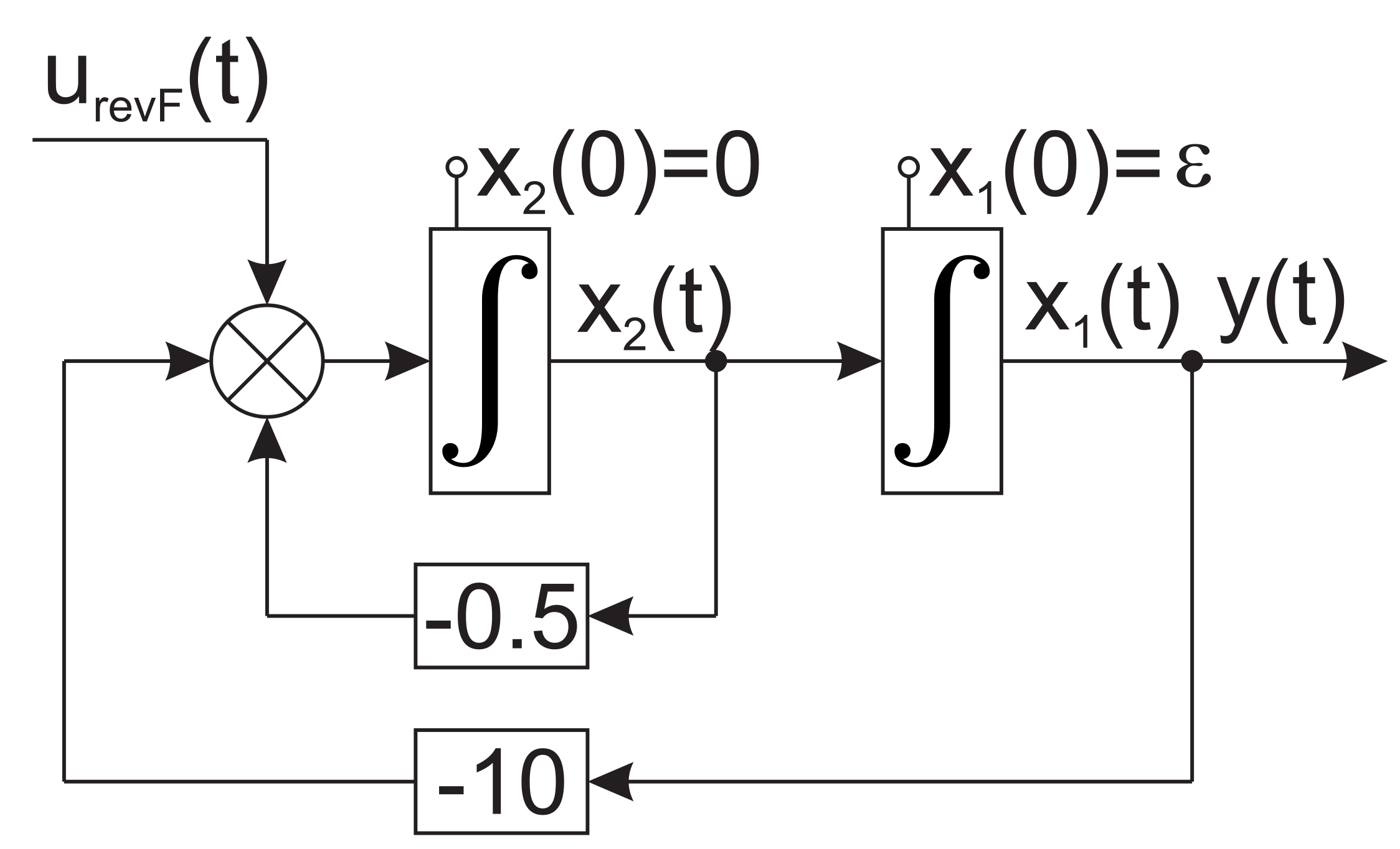
- The compensating damping is illustrated with the Figure 4 through an output drawn from to be stored in . This system is then simplified as presented with Figure 6 and continues to maintain time reversal symmetry. The simulation result from systems described in Figure 4 and Figure 6 give out identical waveform as shown in Figure 5.
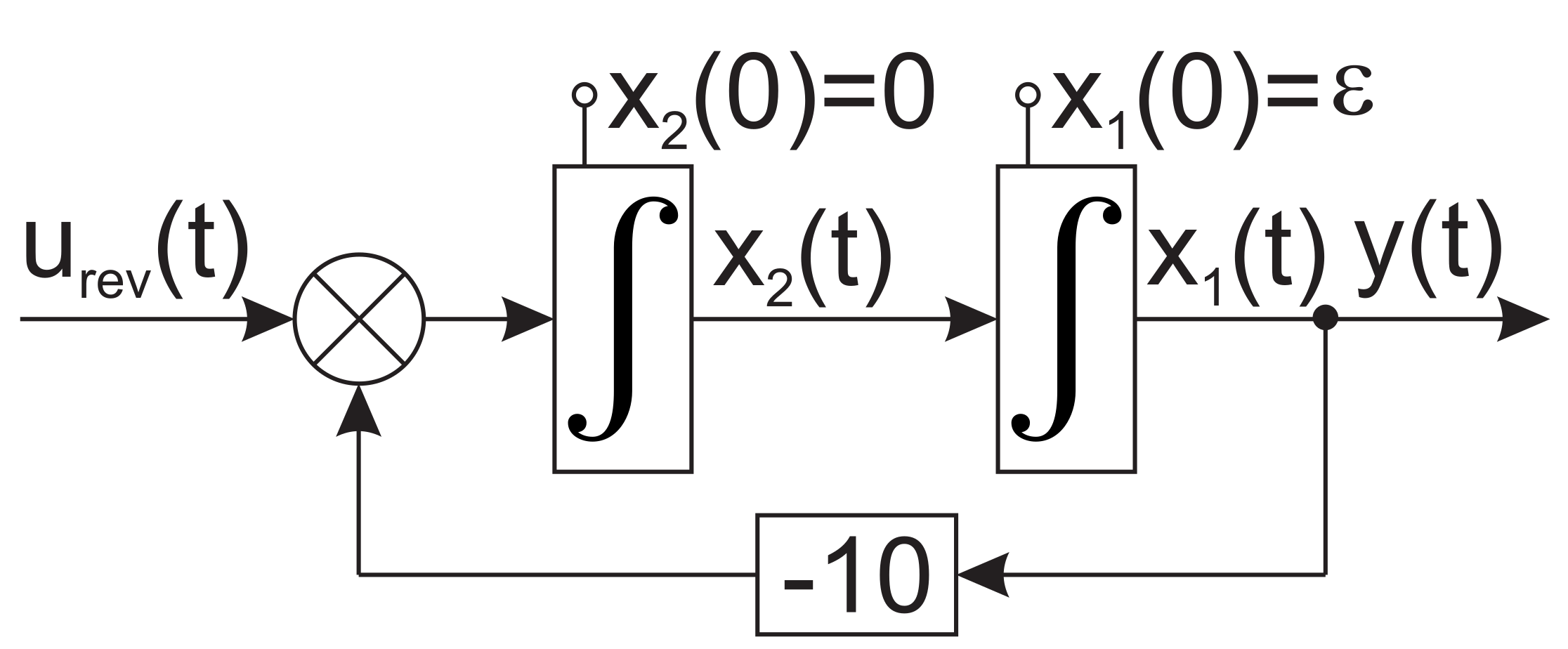
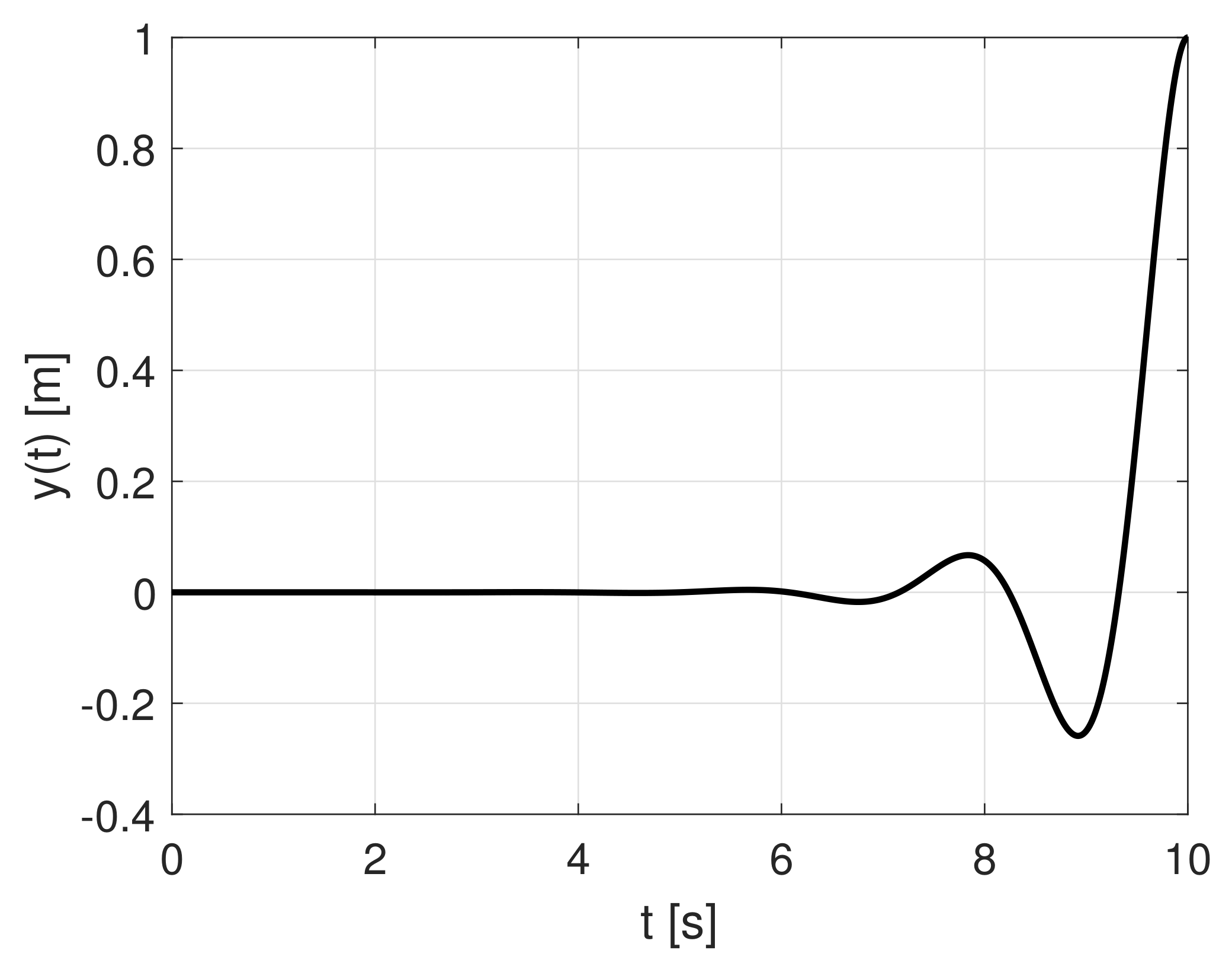
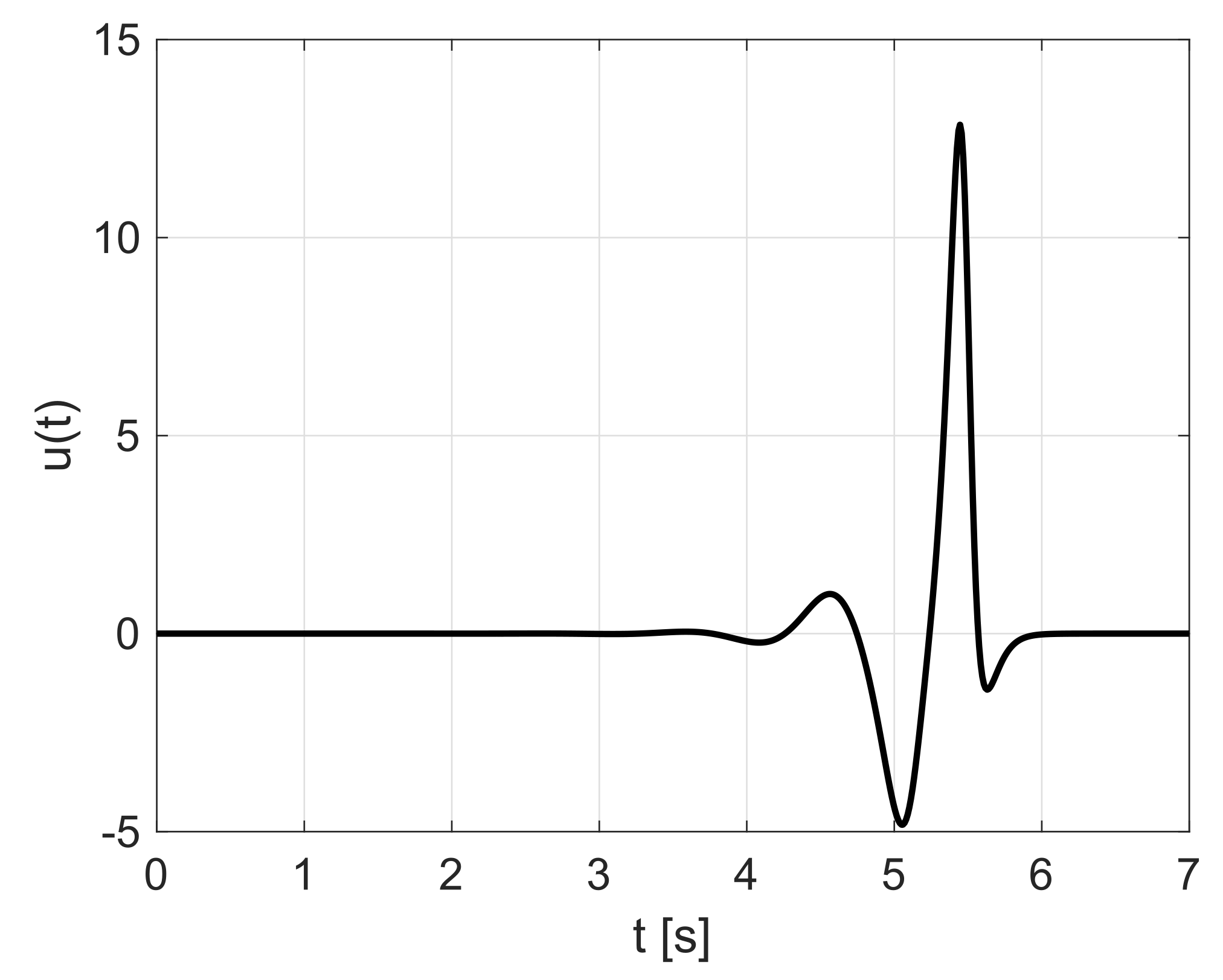
- Reversing the time flow of the control signal depicted in Figure 6 in time presented in Figure 7 into using the relation . The initial conditions applied in Figure 7 will correspond to the final values reached in previous phase at the time . Supposing adequate time range, in this case the values will be very close to zero, , , respectively. Resulting waveform is depicted in Figure 8.
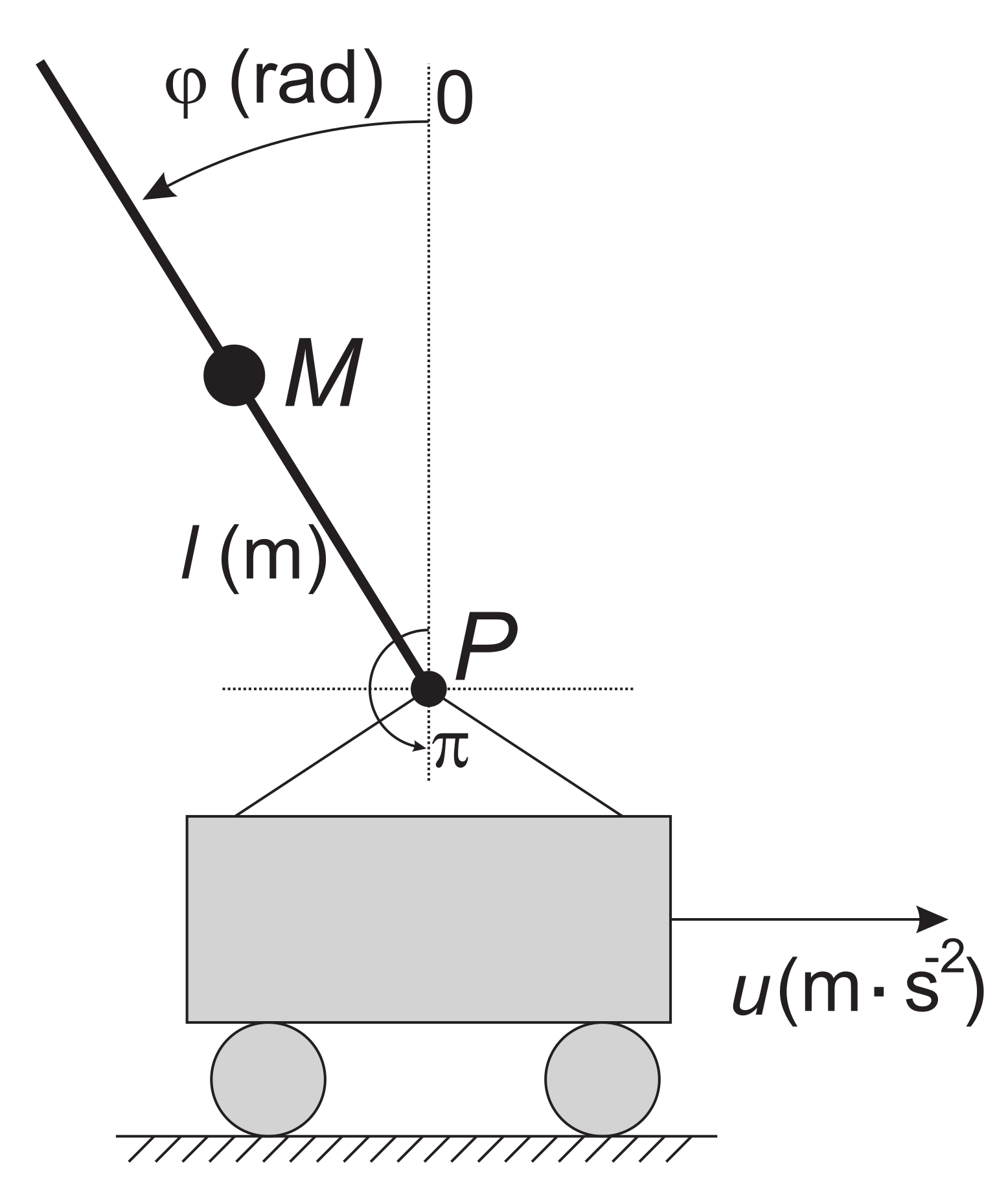
2.2. Primary Case Study: Swing-Up of the Inverted Pendulum on the Cart
Time-Reversal Symmetry (Reversibility) of the System
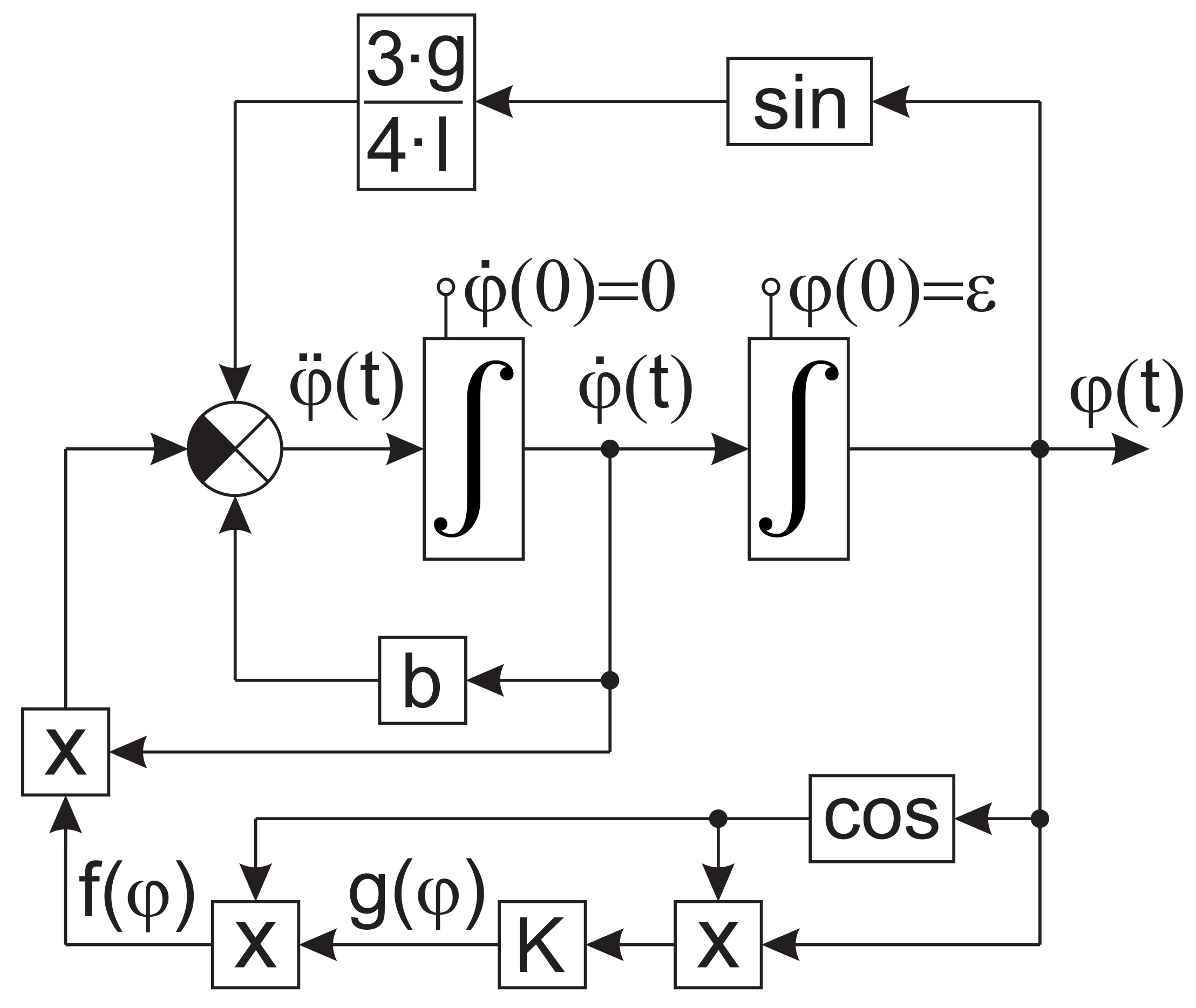
2.3. Methodology: Time-Reversal Symmetry Applied to the Inverted Pendulum Model
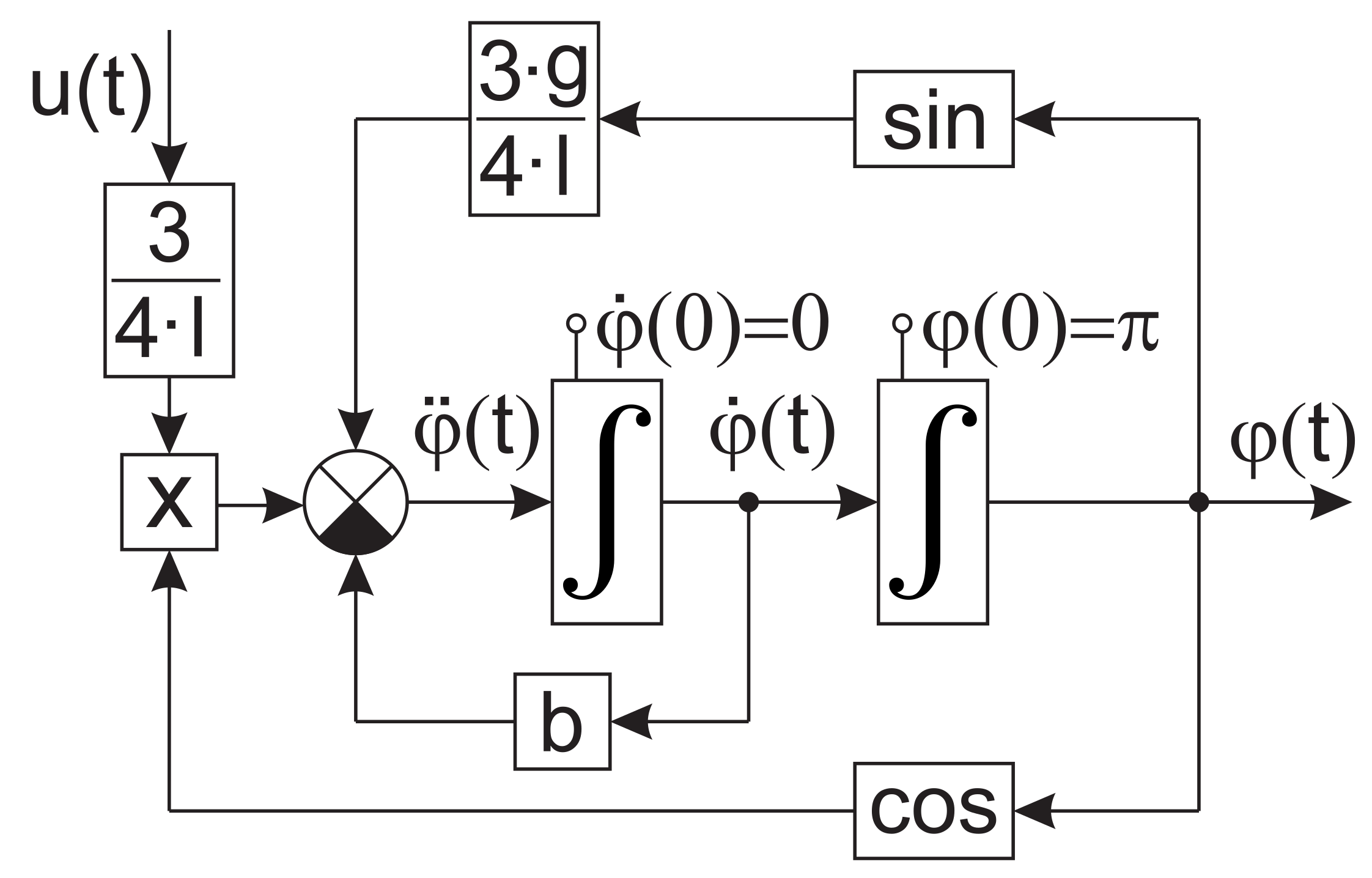
2.3.1. Expert Choice of Function
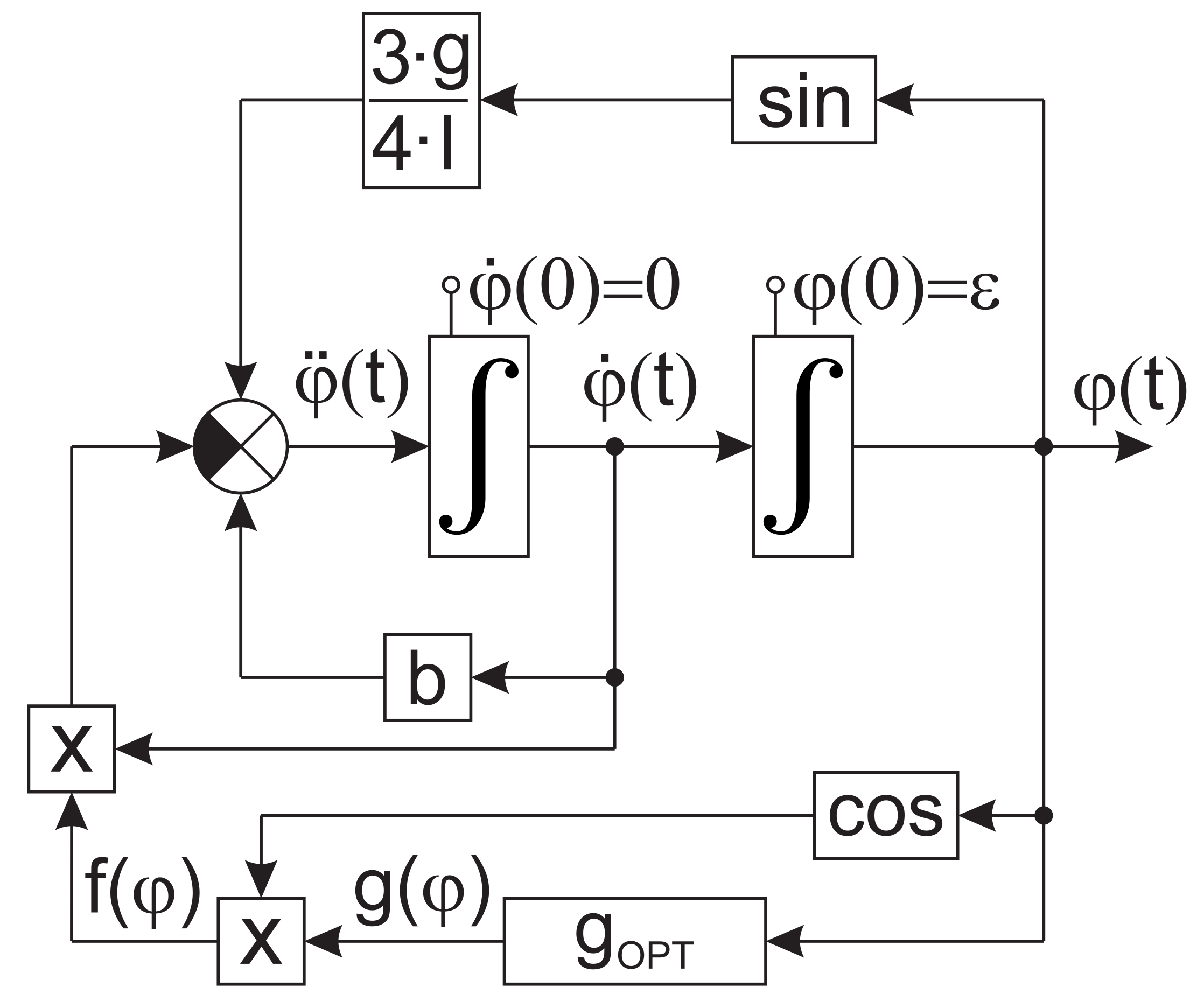
2.3.2. Calculation of Function Based on Numerical Optimization Procedure
- Term penalizes violation of basic constraints placed on state trajectories and control;
- Term penalizes error between actual trajectory and predefined state trajectory ;
- The other terms , , penalize error of actual trajectories and predefined zero values at the final point of time interval;
- The last term is a stabilizing term assuring a converging solution, it represents energy minimization.
3. Results for Primary Case Study
3.1. Results Based on Expert Choice of Function
3.2. Results Based on the Numerical Optimization Procedure for Function
- ;
- ;
- ;
- ;
- ;
- ;
- .
- ;
- ;
- ;
- ;
- .
4. Discussion
5. Conclusions
Further Research Plans
Author Contributions
Funding
Conflicts of Interest
References
- Betts, J.T. Survey of numerical methods for trajectory optimization. J. Control Guid. Dyn. 1998, 21, 193–207. [Google Scholar] [CrossRef]
- Powers, D.L. Boundary Value Problems; Harcourt Brace Jovanovich: San Diego, CA, USA, 1987. [Google Scholar]
- Keller, H. Numerical Methods for Two-Point Boundary Value Problems; Blaisdell Publishing Co.: Waltham, MA, USA, 1987. [Google Scholar]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes in C, the Art of Scientific Computing, 2nd ed.; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Guibout, V.; Scheeres, D.J. Solving two-point boundary value problems using generating functions: Theory and applications to astrodynamics. In Elsevier Astrodynamics Series; Gurfil, P., Ed.; Butterworth-Heinemann: Oxford, UK, 2006; Volume 1, pp. 53–105. [Google Scholar]
- Lamb, J.; Roberts, J. Time-reversal symmetry in dynamical systems: A survey. Phys. Nonlinear Phenom. 1998, 112, 1–39. [Google Scholar] [CrossRef]
- Contessa, G. Scientific models and fictional objects. Synthese 2010, 172, 215. [Google Scholar] [CrossRef]
- Nelson, R.A.; Olsson, M. The pendulum—Rich physics from a simple system. Am. J. Phys. 1986, 54, 112–121. [Google Scholar] [CrossRef]
- Furuta, K.; Iwase, M. Swing-up time analysis of pendulum. Bull. Pol. Acad. Sci. Tech. Sci. 2004, 52, 153–163. [Google Scholar]
- Birkhoff, G.D. The restricted problem of three bodies. Rendiconti del Circolo Matematico di Palermo (1884–1940) 2008, 39, 265. [Google Scholar] [CrossRef]
- DeVogelaere, R. On the structure of periodic solutions of conservative systems, with applications. In Contribution to the Theory of Nonlinear Oscil Lations; Lefschetz, S., Ed.; Princeton University Press: Princeton, NJ, USA, 1958; Volume 4, pp. 53–84. [Google Scholar]
- Heinbockel, J.; Struble, R. Periodic solutions for differential systems with symmetries. J. Soc. Industr. Appl. Math. 1965, 13, 425–440. [Google Scholar] [CrossRef]
- Moser, J. Convergent series expansions for quasi-periodic motions. Math. Annalen 1967, 169, 136–176. [Google Scholar] [CrossRef]
- Bibikov, Y.; Pliss, V. On the existence of invariant tori in a neighbourhood of the zero solution of a system of ordinary differential equations. Differ. Equ. 1967, 3, 967–976. [Google Scholar]
- Hale, J. Ordinary differential equations. In Pure and Applied Mathematics; Wiley-Interscience: New York, NY, USA, 1969; Volume 21. [Google Scholar]
- Devaney, R. Reversible diffeomorphisms and flows. Trans. Am. Math. Soc. 1976, 218, 89–113. [Google Scholar] [CrossRef]
- Arnol’d, V.; Sevryuk, M. Nonlinear phenomena in plasma physics and hydrodynamics. In Pure and Applied Mathematics; Sagdeev, R., Ed.; Mir: Moscow, Russia, 1986; Volume 21, pp. 31–64. [Google Scholar]
- Miller, D.J. Realism and time symmetry in quantum mechanics. Phys. Lett. 1996, 222, 31–36. [Google Scholar] [CrossRef]
- Aharonov, Y.; Tollaksen, J. New insights on time-symmetry in quantum mechanics. arXiv 2007, arXiv:0706.1232. [Google Scholar]
- Vlad, S.E. Boolean Functions: Topics in Asynchronicity, 1st ed.; Wiley: New York, NY, USA, 2019. [Google Scholar] [CrossRef]
- Knoll, C.; Röbenack, K. Trajectory planning for a non-flat mechanical system using time-reversal symmetry. PAMM 2011, 11, 819–820. [Google Scholar] [CrossRef]
- Stannarius, R. Time reversal of parametrical driving and the stability of the parametrically excited pendulum. Am. J. Phys. 2009, 77, 164–168. [Google Scholar] [CrossRef]
- Kerr, W.; Williams, M.; Bishop, A.; Fesser, K.; Lomdahl, P.; Trullinger, S. Symmetry and chaos in the motion of the damped driven pendulum. Z. FüR Phys. Condens. Matter 1985, 59, 103–110. [Google Scholar] [CrossRef]
- Roberts, J.; Quispel, G. Chaos and time-reversal symmetry. Order and chaos in reversible dynamical systems. Phys. Rep. 1992, 216, 63–177. [Google Scholar] [CrossRef]
- Kawala-Sterniuk, A.; Zolubak, M.; Ozana, S.; Siui, D.; Macek-Kaminska, K.; Grochowicz, B.; Pelc, M. Implementation of smoothing filtering methods for the purpose of improvement inverted pendulum’s trajectory. Prz. Elektrotech 2019. [Google Scholar] [CrossRef]
- Limebeer, D.J.N.; Massaro, M. Dynamics and Optimal Control of Road Vehicles; Oxford University Press: Oxford, UK, 2018. [Google Scholar]
- Hatano, N.; Ordonez, G. Time-reversal symmetry and arrow of time in quantum mechanics of open systems. Entropy 2019, 21, 380. [Google Scholar] [CrossRef]
- Yokoyama, J.; Mihara, K.; Suemitsu, H.; Matsuo, T. Swing-up control of a inverted pendulum by two step control strategy. In Proceedings of the 2011 IEEE/SICE International Symposium on System Integration (SII), Kyoto, Japan, 20–22 December 2011; pp. 1061–1066. [Google Scholar] [CrossRef]
- Ozana, S.; Schlegel, M. Computation of reference trajectories for inverted pendulum with the use of two-point BvP with free parameters. IFAC-PapersOnLine 2018, 51, 408–413. [Google Scholar] [CrossRef]
- Ozana, S. Swing-Up and Control of Linear Simple Inverted Pendulum. 2018. Available online: https://youtu.be/Sqhr8fYhMfg (accessed on 5 May 2020).
- Kelly, M. An introduction to trajectory optimization: How to do your own direct collocation. SIAM Rev. 2017, 59, 849–904. [Google Scholar] [CrossRef]
- Houska, B.; Ferreau, H.; Diehl, M. ACADO Toolkit – an open source framework for automatic control and dynamic optimization. Optim. Control. Appl. Methods 2011, 32, 298–312. [Google Scholar] [CrossRef]
- Kunze, A. Pytrajectory’s Documentation. 2005. Available online: https://pytrajectory.readthedocs.io (accessed on 5 May 2020).
- Graichen, K.; Hagenmeyer, V.; Zeitz, M. A new approach to inversion-based feedforward control design for nonlinear systems. Automatica 2005, 41, 2033–2041. [Google Scholar] [CrossRef]
- Dwivedi, P.; Pandey, S.; Junghare, A.S. Stabilization of unstable equilibrium point of rotary inverted pendulum using fractional controller. J. Frankl. Inst. 2017, 354, 7732–7766. [Google Scholar] [CrossRef]
- Mandić, P.D.; Lazarević, M.P.; Šekara, T.B. Stabilization of inverted pendulum by fractional order PD controller with experimental validation: D-decomposition approach. In Proceedings of the International Conference on Robotics in Alpe-Adria Danube Region, Belgrade, Serbia, 30 June–2 July 2016; pp. 29–37. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozana, S.; Docekal, T.; Kawala-Sterniuk, A.; Mozaryn, J.; Schlegel, M.; Raj, A. Trajectory Planning for Mechanical Systems Based on Time-Reversal Symmetry. Symmetry 2020, 12, 792. https://doi.org/10.3390/sym12050792
Ozana S, Docekal T, Kawala-Sterniuk A, Mozaryn J, Schlegel M, Raj A. Trajectory Planning for Mechanical Systems Based on Time-Reversal Symmetry. Symmetry. 2020; 12(5):792. https://doi.org/10.3390/sym12050792
Chicago/Turabian StyleOzana, Stepan, Tomas Docekal, Aleksandra Kawala-Sterniuk, Jakub Mozaryn, Milos Schlegel, and Akshaya Raj. 2020. "Trajectory Planning for Mechanical Systems Based on Time-Reversal Symmetry" Symmetry 12, no. 5: 792. https://doi.org/10.3390/sym12050792
APA StyleOzana, S., Docekal, T., Kawala-Sterniuk, A., Mozaryn, J., Schlegel, M., & Raj, A. (2020). Trajectory Planning for Mechanical Systems Based on Time-Reversal Symmetry. Symmetry, 12(5), 792. https://doi.org/10.3390/sym12050792