Finite-Time Control for Nonlinear Systems with Time-Varying Delay and Exogenous Disturbance

Abstract
1. Introduction
2. Problem Formulation
3. Main Results
3.1. Finite-Time Boundedness Analysis
3.2. Controller Design
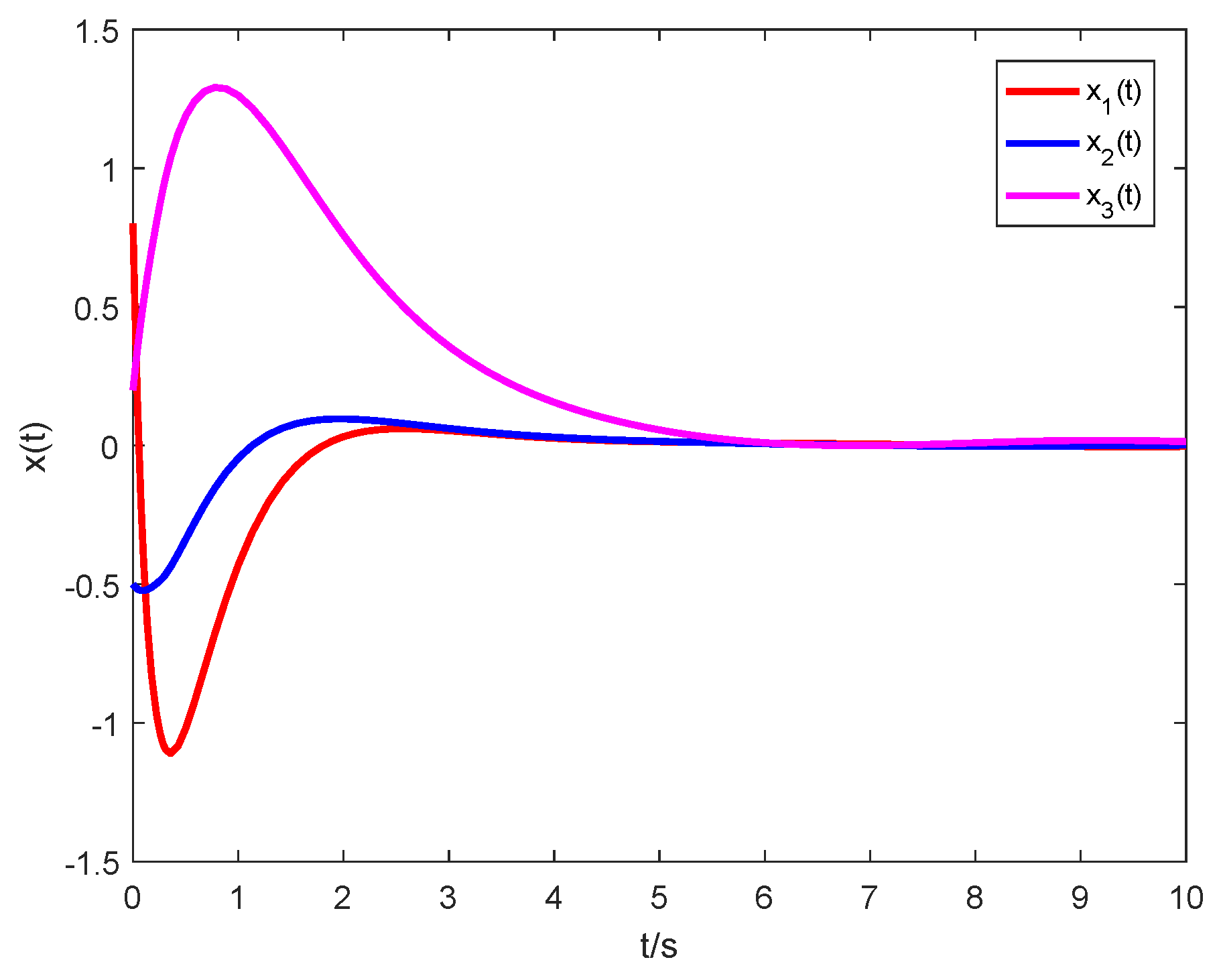
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, H.Q.; Liu, P.X.; Li, S.; Wang, D. Adaptive neural output-feedback control for a class of nonlower triangular nonlinear systems with unmodeled dynamics. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 3658–3668. [Google Scholar]
- Zhao, X.D.; Wang, X.Y.; Zhang, S.; Zong, G.D. Adaptive neural backstepping control design for a class of nonsmooth nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1820–1831. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N. Adaptive sliding mode control of a class of nonlinear systems with artificial delay. J. Frankl. Inst. 2017, 354, 8156–8179. [Google Scholar] [CrossRef]
- Qiu, J.B.; Sun, K.K.; Wang, T.; Gao, H.J. Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Trans. Fuzzy Syst. 2019, 27, 2152–2162. [Google Scholar] [CrossRef]
- Vrabel, R. Eigenvalue based approach for assessment of global robustness of nonlinear dynamical systems. Symmetry 2019, 11, 569. [Google Scholar] [CrossRef]
- Li, X.; Zhu, Z.C.; Rui, G.C.; Cheng, D.; Shen, G.; Tang, Y. Force loading tracking control of an electro-hydraulic actuator based on a nonlinear adaptive fuzzy backstepping control scheme. Symmetry 2018, 10, 155. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Syst. Man Cybern. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Zheng, W.; Wang, H.B.; Wang, H.R.; Wen, S.H. Stability analysis and dynamic output feedback controller design of T-S fuzzy systems with time-varying delays and external disturbances. J. Comput. Appl. Math. 2019, 358, 111–135. [Google Scholar] [CrossRef]
- Tan, J.Y.; Dian, S.Y.; Zhao, T.; Chen, L. Stability and stabilization of T-S fuzzy systems with time delay via Wirtinger-based double integral inequality. Neurocomputing 2018, 275, 1063–1071. [Google Scholar] [CrossRef]
- Seuret, A.; Gouaisbaut, F. Wirtinger-based integral inequality: Application to time-delay systems. Automatica 2013, 49, 2860–2866. [Google Scholar] [CrossRef]
- Zhao, T.; Huang, M.B.; Dian, S.Y. Stability and stabilization of T-S fuzzy systems with two additive time-varying delays. Inform. Sci. 2019, 494, 174–192. [Google Scholar] [CrossRef]
- Benzaouia, A.; Hajjaji, A.E. Conditions of stabilization of positive continuous Takagi-Sugeno fuzzy systems with delay. Int. J. Fuzzy Syst. 2018, 20, 750–758. [Google Scholar] [CrossRef]
- Lian, Z.; He, Y.; Zhang, C.K.; Wu, M. Further robust stability analysis for uncertain Takagi-Sugeno fuzzy systems with time-varying delay via relaxed integral inequality. Inform. Sci. 2017, 409–410, 139–150. [Google Scholar] [CrossRef]
- Zhao, T.; Dian, S.Y. State feedback control for interval type-2 fuzzy systems with time-varying delay and unreliable communication links. IEEE Trans. Fuzzy Syst. 2018, 26, 951–966. [Google Scholar] [CrossRef]
- Liu, C.; Mao, X.; Xu, X.Z.; Zhang, H.B. Stability analysis of discrete-time switched T-S fuzzy systems with all subsystems unstable. IEEE Access 2019, 7, 50412–50418. [Google Scholar] [CrossRef]
- An, J.Y.; Lin, W.G. Improved stability criteria for time-varying delayed T-S fuzzy systems via delay partitioning approach. Fuzzy Sets Syst. 2011, 185, 83–94. [Google Scholar] [CrossRef]
- Yang, J.; Luo, W.P.; Wang, Y.H.; Duan, C.S. Improved stability criteria for T-S fuzzy systems with time-varying delay by delay-partitioning approach. Int. J. Control Autom. Syst. 2015, 13, 1521–1529. [Google Scholar] [CrossRef]
- Zeng, H.B.; Park, J.H.; Xia, J.W.; Xiao, S.P. Improved delay-dependent stability criteria for T-S fuzzy systems with time-varying delay. Appl. Math. Comput. 2014, 235, 492–501. [Google Scholar] [CrossRef]
- Kwon, O.M.; Park, M.J.; Lee, S.M.; Park, J.H. Augmented Lyapunov–Krasovskii functional approaches to robust stability criteria for uncertain Takagi-Sugeno fuzzy systems with time-varying delay. Fuzzy Sets Syst. 2012, 201, 1–19. [Google Scholar] [CrossRef]
- Wu, M.; He, Y.; She, J.H.; Liu, G.P. Delay-dependent criteria for robust stability of time-varying delay systems. Automatica 2004, 40, 1435–1439. [Google Scholar] [CrossRef]
- Gu, K.; Kharitonov, V.L.; Chen, J. Stability of Time-Delay Systems; Birkhauser: Basel, Switzerland, 2003. [Google Scholar]
- Park, P.G.; Ko, J.W.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 235–238. [Google Scholar] [CrossRef]
- Park, P.; Lee, W.; Lee, S.Y. Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. J. Frankl. Inst. 2015, 352, 1378–1396. [Google Scholar] [CrossRef]
- Zeng, H.B.; He, Y.; Wu, M.; She, J.H. Free-matrix-based integral inequality for stability analysis of systems with time-varying delay. IEEE Trans. Autom. Control 2015, 60, 2768–2772. [Google Scholar] [CrossRef]
- Liu, F.; Wu, M.; He, Y.; Yokoyamab, R. New delay-dependent stability criteria for T-S fuzzy systems with time-varying delay. Fuzzy Sets Syst. 2010, 161, 2033–2042. [Google Scholar] [CrossRef]
- Lian, Z.; He, Y.; Zhang, C.K.; Wu, M. Stability analysis for T-S fuzzy systems with time-varying delay via free-matrix-based integral inequality. Int. J. Control Autom. Syst. 2016, 14, 21–28. [Google Scholar] [CrossRef]
- Amato, F.; Ariola, M.; Dorato, P. Finite-time control of linear systems subject to parametric uncertainties and disturbances. Automatica 2001, 37, 1459–1463. [Google Scholar] [CrossRef]
- Liu, H.; Shi, P.; Karimi, H.R.; Chadli, M. Finite-time stability and stabilisation for a class of nonlinear systems with time-varying delay. Int. J. Syst. Sci. 2016, 47, 1433–1444. [Google Scholar] [CrossRef]
- Huang, X.P.; Wu, C.Y.; Liu, Y.P. Finite-time H∞ model reference control of SLPV systems and its application to aero-engines. IEEE Access 2019, 7, 43525–43533. [Google Scholar] [CrossRef]
- Ma, R.C.; Jiang, B.; Liu, Y. Finite-time stabilization with output-constraints of a class of high-order nonlinear systems. Int. J. Control Autom. Syst. 2018, 16, 945–952. [Google Scholar] [CrossRef]
- Sakthivel, R.; Saravanakumar, T.; Kaviarasan, B.; Lim, Y.D. Finite-time dissipative based fault-tolerant control of Takagi-Sugeno fuzzy systems in a network environment. J. Frankl. Inst. 2017, 354, 3430–3455. [Google Scholar] [CrossRef]
- Ren, C.C.; Ai, Q.L.; He, S.P. Finite-time non-fragile control of a class of uncertain linear positive systems. IEEE Access 2019, 7, 6319–6326. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Seuret, A.; Gouaisbaut, F. An improved reciprocally convex inequality and an augmented Lyapunov–Krasovskii functional for stability of linear systems with time-varying delay. Automatica 2017, 84, 221–226. [Google Scholar] [CrossRef]
- Cao, Y.Y.; Frank, P.M. Stability analysis and synthesis of nonlinear time-delay systems via linear Takagi-Sugeno fuzzy models. Fuzzy Sets Syst. 2001, 124, 213–229. [Google Scholar] [CrossRef]
- Han, L.; Qiu, C.Y.; Xiao, J. Finite-time H∞ control synthesis for nonlinear switched systems using T-S fuzzy model. Neurocomputing 2016, 171, 156–170. [Google Scholar] [CrossRef]
- Yan, H.C.; Wang, T.T.; Zhang, H.; Shi, H.B. Event-triggered H∞ control for uncertain networked T-S fuzzy systems with time delay. Neurocomputing 2015, 157, 273–279. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| h | 0.6 | 0.8 | 1.0 | 1.2 | 1.4 |
| 2.8830 | 3.6111 | 4.5002 | 5.7103 | 6.7601 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruan, Y.; Huang, T. Finite-Time Control for Nonlinear Systems with Time-Varying Delay and Exogenous Disturbance. Symmetry 2020, 12, 447. https://doi.org/10.3390/sym12030447
Ruan Y, Huang T. Finite-Time Control for Nonlinear Systems with Time-Varying Delay and Exogenous Disturbance. Symmetry. 2020; 12(3):447. https://doi.org/10.3390/sym12030447
Chicago/Turabian StyleRuan, Yanli, and Tianmin Huang. 2020. "Finite-Time Control for Nonlinear Systems with Time-Varying Delay and Exogenous Disturbance" Symmetry 12, no. 3: 447. https://doi.org/10.3390/sym12030447
APA StyleRuan, Y., & Huang, T. (2020). Finite-Time Control for Nonlinear Systems with Time-Varying Delay and Exogenous Disturbance. Symmetry, 12(3), 447. https://doi.org/10.3390/sym12030447