Investigation of Position and Velocity Stability of the Nanometer Resolution Linear Motor Stage with Air Bearings by Shaping of Controller Transfer Function

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
- (1)
- No friction forces appear in the moving LMS parts;
- (2)
- All parts of the LMS are absolutely rigid. That is, only the rigid body dynamics is considered in the present investigation;
- (3)
- There is no backlash in the connections of the moving LMS parts;
- (4)
- The motion of the all moving LMS parts is straight-linear;
- (5)
- The displacements of all the moving LMS parts are identical;
- (6)
- The current amplifier is considered as linear after tuning of the PI controller in the current control loop;
- (7)
- The moving mass is constant and the amplifier bus voltage is constant;
- (8)
- The environmental conditions are constant and well-controlled.
3. Modeling and Identification
3.1. Governing Equations
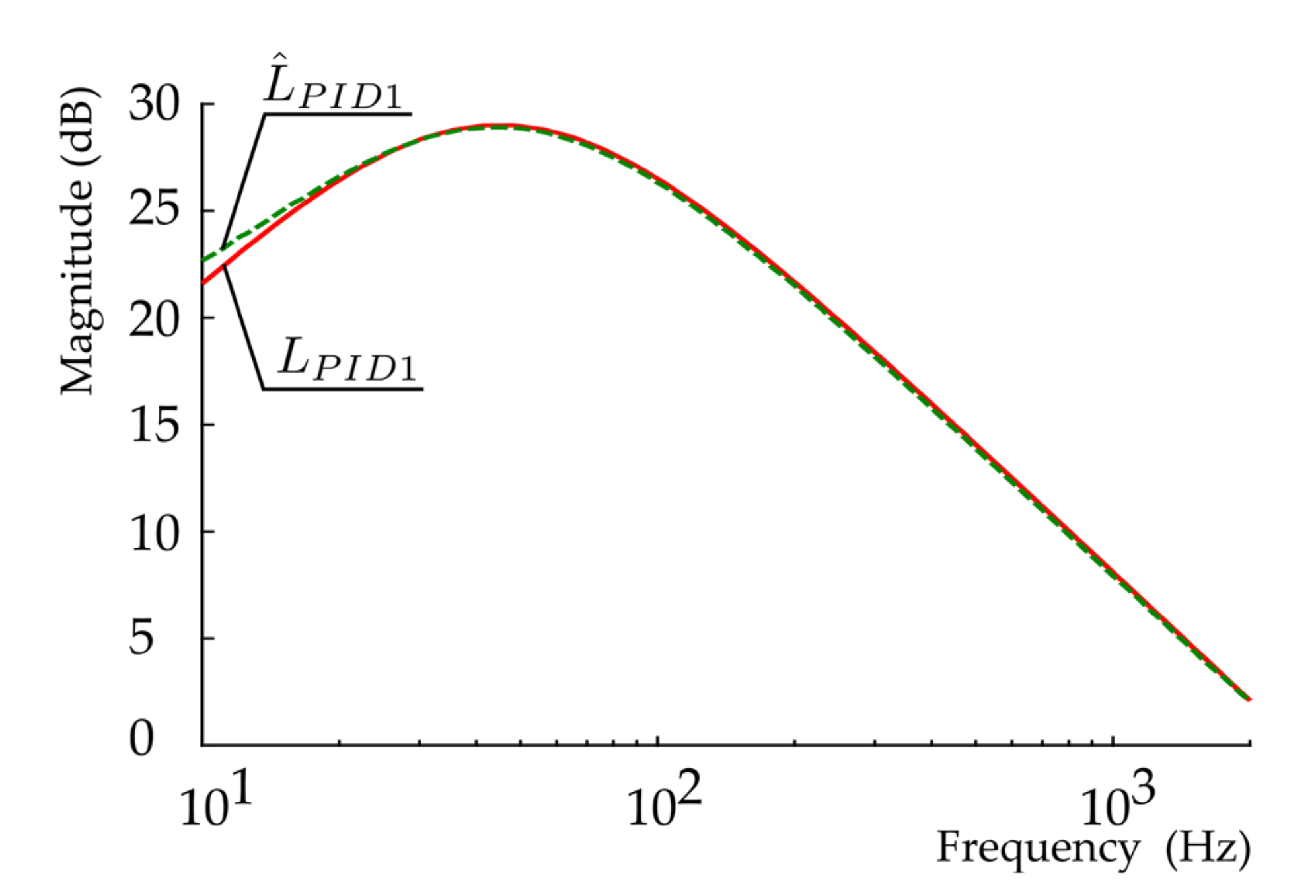
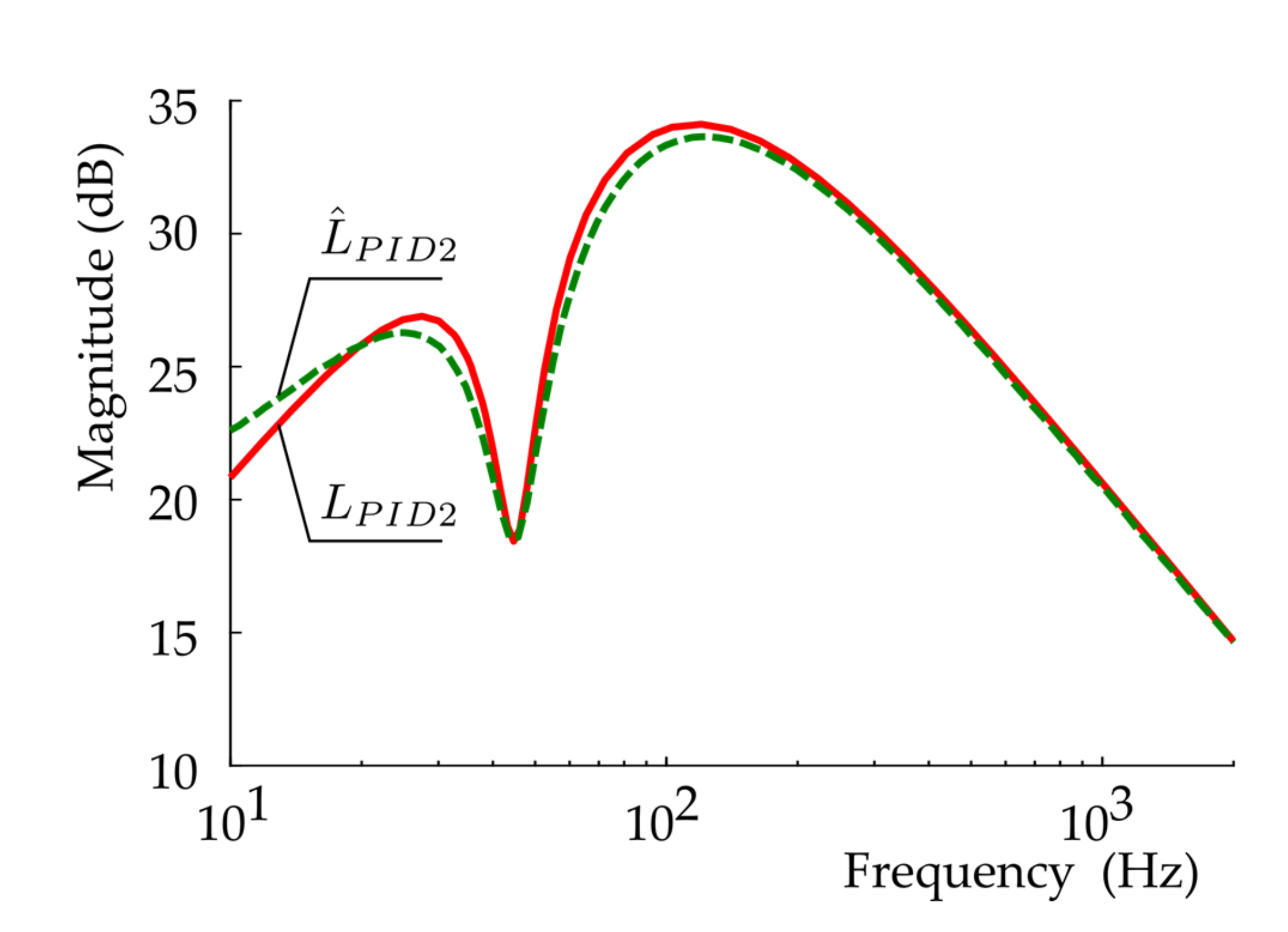
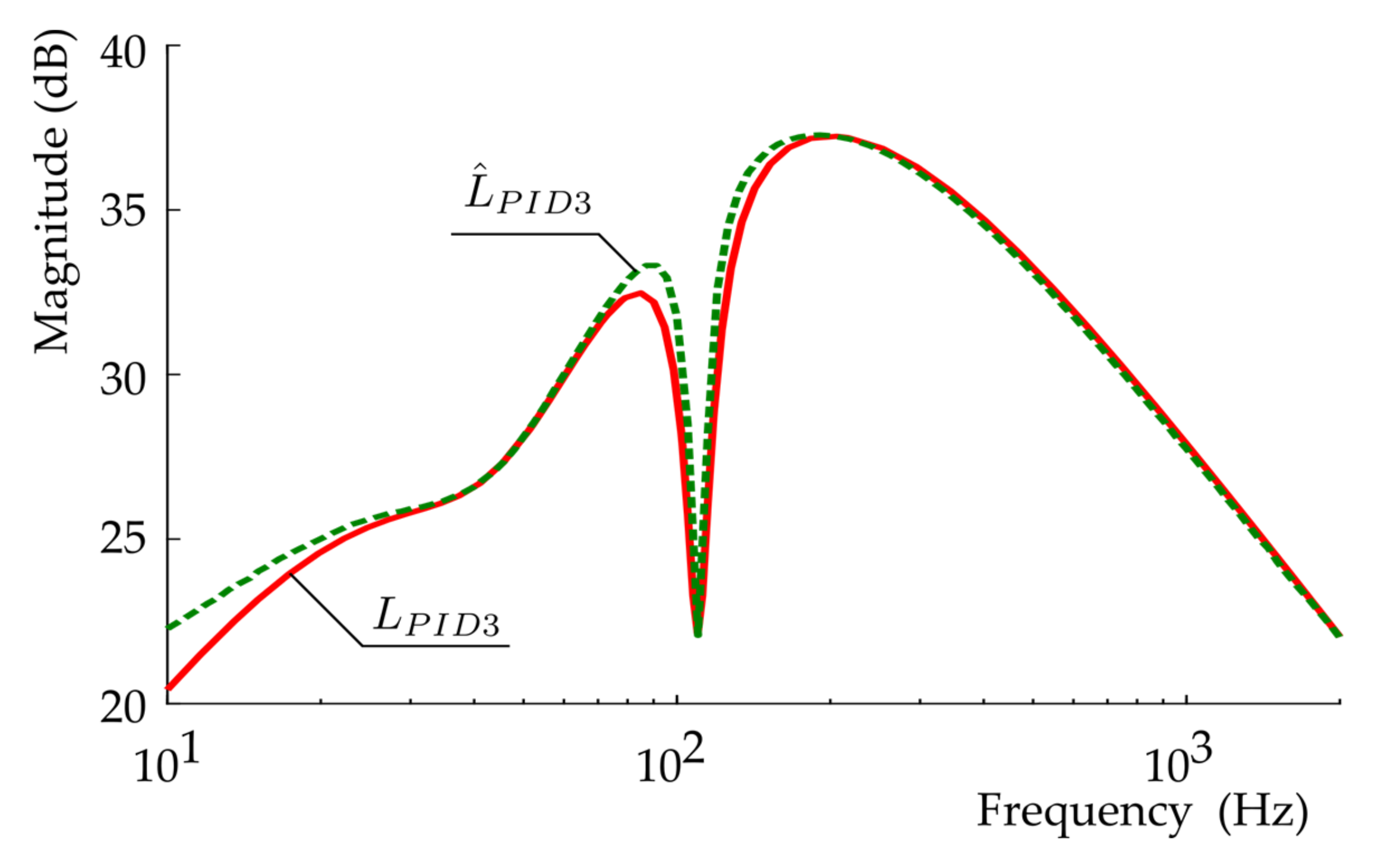
3.2. Theoretical Transfer Functions, Their Frequency Response Functions and a Comparison with the Experimentally Identified Frequency Response Functions
4. Results and Discussion
- (1)
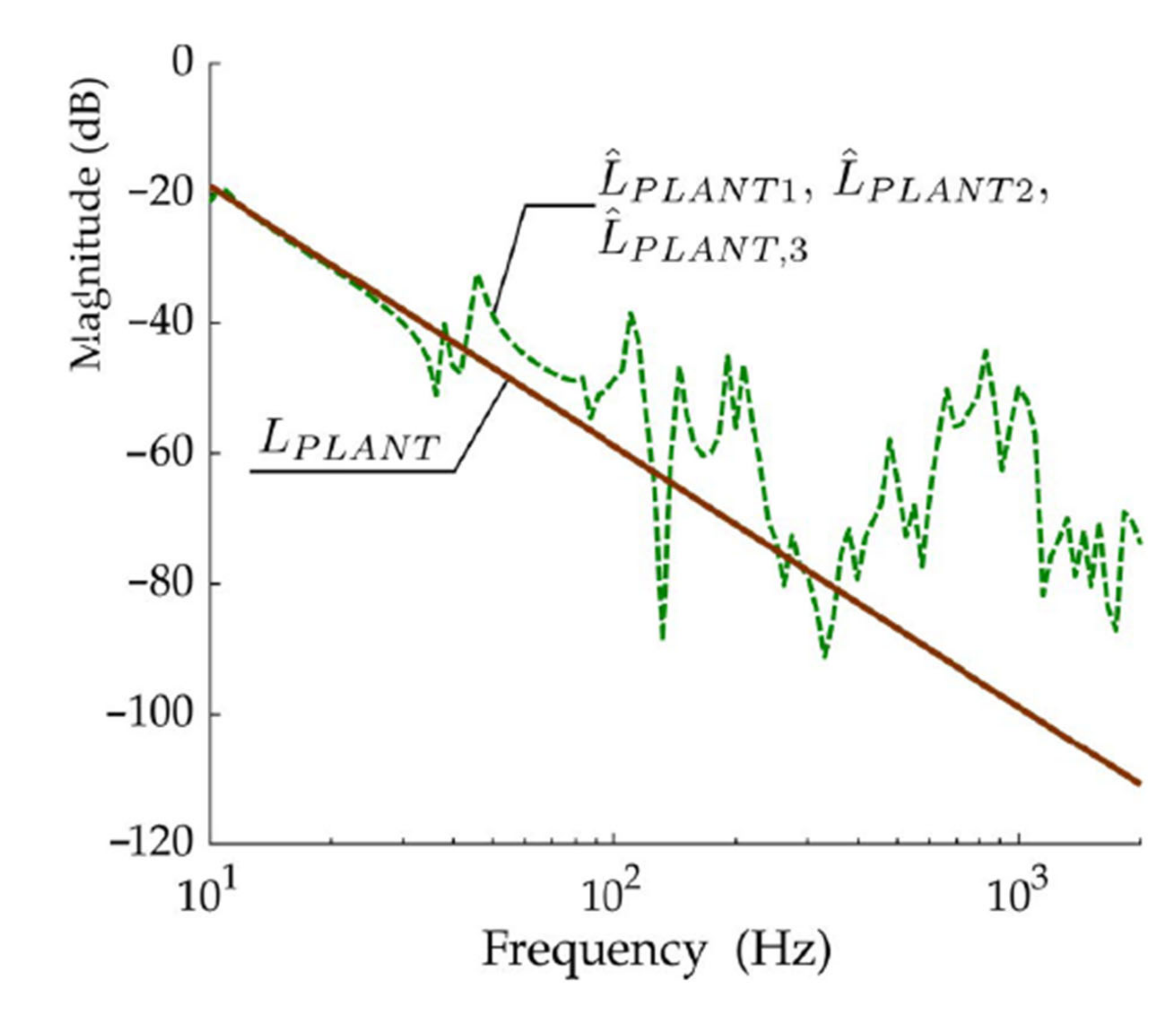
- An excitation of the system with the harmonic signal of the constant amplitude to identify the transfer functions of the systems under investigation. This investigation gives the information concerning the frequency domain.
- (2)
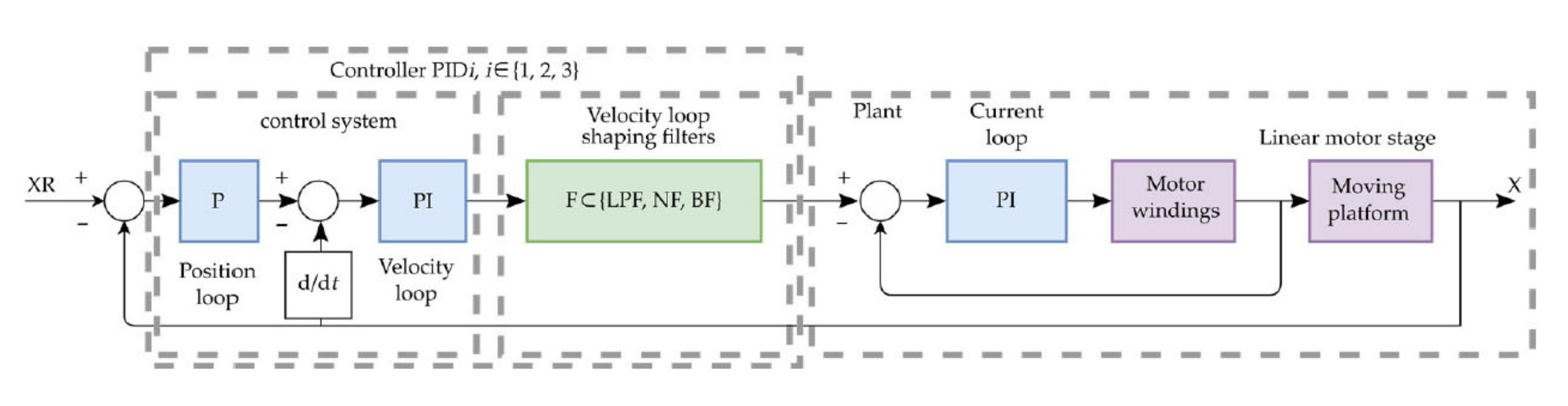
- Tuning of the system to adjust the velocity loop shaping filters.
- (3)
- Excitation of the moving part of LMS by different velocities.
- (4)
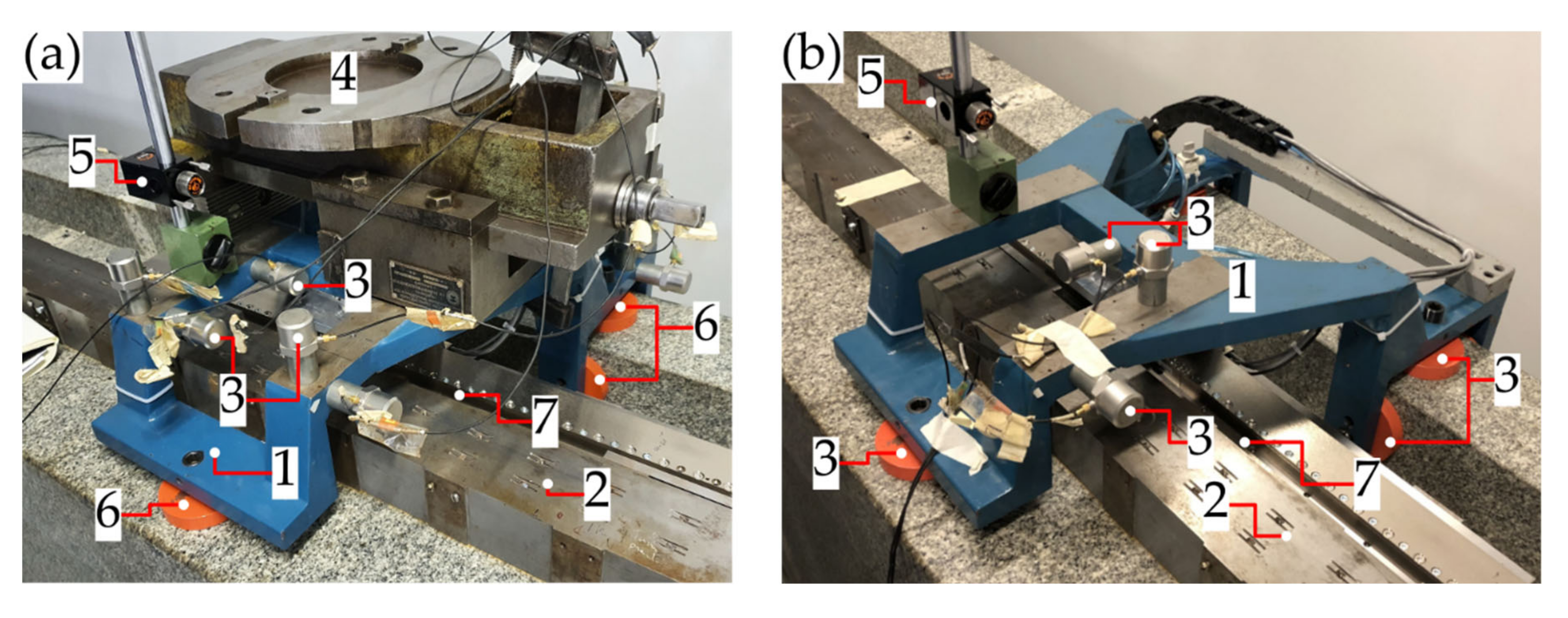
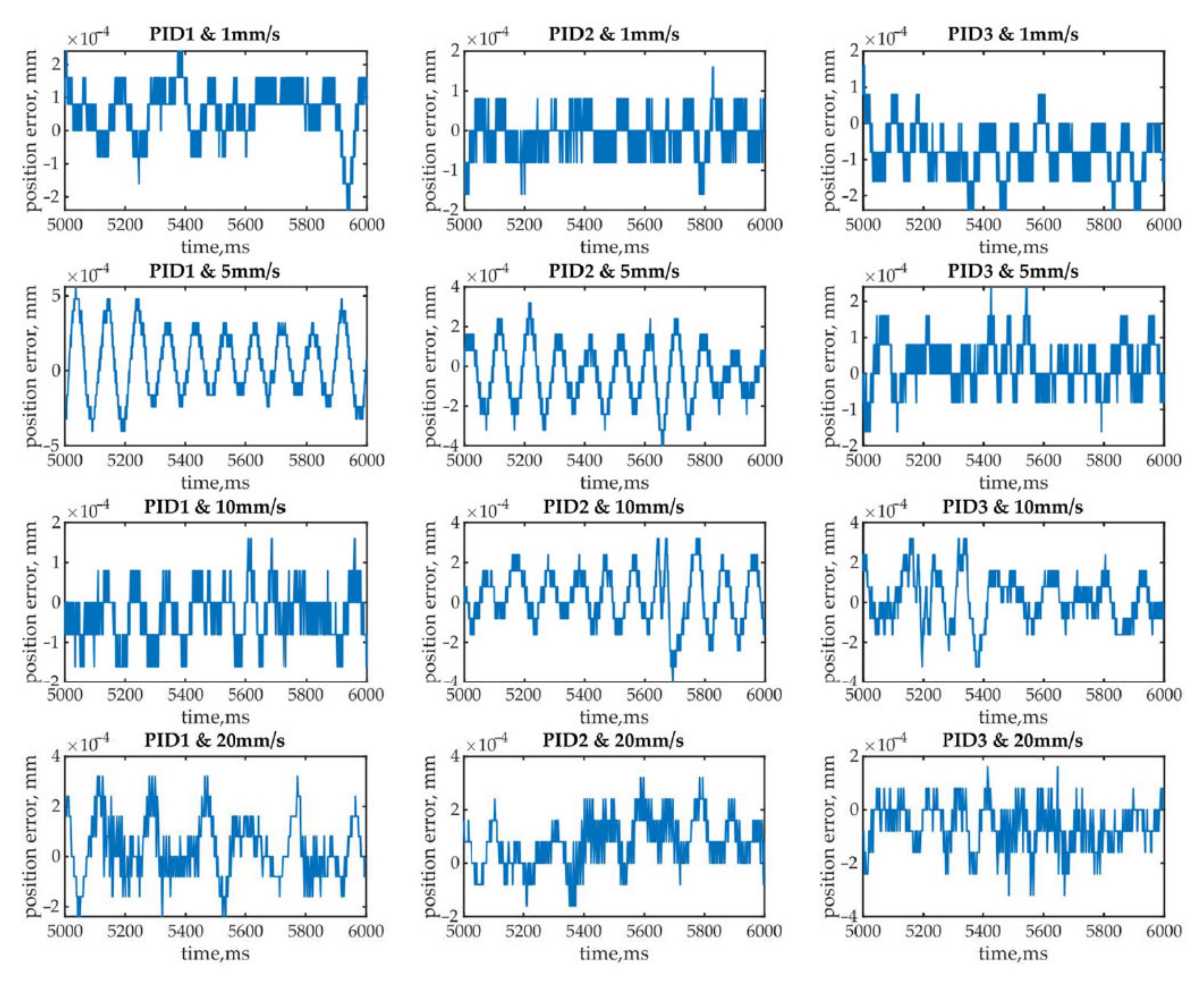
- Analysis of the time dependent displacement of the moving platform, see detail 1 in Figure 1, at steady dynamic process ( = 0) as a function of the different velocities mm/s and different controllers: PID1, PID2 and PID3, while the mass of load kg was constant.
- (1)
- When the velocity m/s, the LMS with controller PID2 attains both minimum values nm and nm.
- (2)
- When the velocity m/s, the LMS with controller PID3 attains both minimum values nm and nm.
- (3)
- When the velocity m/s, the LMS with controller PID3 attains minimum values of the estimated mean nm, while the LMS with PID1 attains the minimum estimated standard deviation: nm.
- (4)
- When the velocity m/s, the LMS with controller PID1 attains minimum values of the estimated mean nm, while the LMS with PID3 attains the minimum estimated standard deviation: nm.
5. Conclusions
- (1)
- To decrease the dynamic displacement error of the platform, the order of the polynomials of the transfer function of the considered long-travel linear motor stage should be increased with the decreased velocity of the displacements of the stage;
- (2)
- The transfer functions of the fourth order polynomials can be good enough to obtain an appropriate dynamic error of the displacement of the platform when the velocity of the platform is 10 mm/s and 20 mm/s;
- (3)
- The minimums of the estimated mean and the standard deviation of the dynamic displacement error of the platform were attained with the following controllers depending on the exciting velocity:
- At 1 mm/s exciting velocity, the best controller consists of low pass and notch filters (controller PID2); the absolute value of the estimated mean and the standard deviation are 14.2 nm and 50.6 nm, respectively;
- At 5 mm/s exciting velocity, the best controller consists of only one low pass filter (controller PID1); the estimated mean and the standard deviation are 21.1 nm and 63.3 nm, respectively;
- At 10 mm/s exciting velocity, according to the estimated standard deviation of the dynamic error, the best controller consists of one low pass filter (controller PID1); the standard deviation is 66.5 nm. However, according to the estimated mean, the best controller consists of a low pass filter, notch filter and second-order bi-quad filter (controller PID3); the estimated mean is 15.9 nm.
- At 20 mm/s exciting velocity, according to the estimated standard deviation of the dynamic error, the best controller consists of a low pass filter, notch filter and second-order bi-quad filter (controller PID3); the standard deviation is 85.3 nm. However, according to the estimated mean, the best controller consists only of a low pass filter (controller PID1); the estimated mean is 31.7 nm.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BF | second order bi-quad filter; |
| BLDC | brushless DC electric motor; |
| EMF | electromotive force; |
| FRF | frequency response function; |
| LMS | long travel linear motor stage with air bearings; |
| LPF | low pass filter; |
| plant | LMS with current amplifier, including the current control loop consisting of proportional-integral controller; |
| NF | notch filter; |
| HOLSYS | modelled transfer function of open loop system; |
| PID | proportional-integral-derivative controller; |
| OLSYS | open loop system; |
| transfer function; | |
| and | theoretically derived and experimentally identified frequency response functions; |
| and | dynamic error and amplitude of the dynamic error of the displacement of the stage of the long travel linear motor stage with air bearings; |
| and | excitation velocity and acceleration; |
| and | minimum and maximum of the dynamic error of the displacement of the stage; |
| and | estimated standard deviation and mean of the dynamic error of the displacement of the stage. |
References
- Fan, Y.; Shao, J.; Sun, G. Optimized PID Controller Based on Beetle Antennae Search Algorithm for Electro-Hydraulic Position Servo Control System. Sensors 2019, 19, 2727. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, B.; Shao, J.; Yang, X. A compound control strategy combining velocity compensation with ADRC of electro-hydraulic position servo control system. ISA Trans. 2014, 53, 1910–1918. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Zhong, W.; Li, C.; Fang, J.; Liu, F. Development of a Contactless Air Conveyor System for Transporting and Positioning Planar Objects. Micromachines 2018, 9, 487. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, Q.; Chen, W.; Lu, L.; Huo, D.; Cheng, K. Aerostatic bearings design and analysis with the application to precision engineering: State-of-the-art and future perspectives. Tribol. Int. 2019, 135, 1–17. [Google Scholar] [CrossRef]
- Nishio, U.; Somaya, K.; Yoshimoto, S. Numerical calculation and experimental verification of static and dynamic characteristics of aerostatic thrust bearings with small feedholes. Tribol. Int. 2011, 44, 1790–1795. [Google Scholar] [CrossRef]
- Sung, E.; Seo, C.-H.; Song, H.; Choi, B.; Jeon, Y.; Choi, Y.-M.; Kim, K.; Lee, M.G. Design and experiment of noncontact eddy current damping module in air bearing–guided linear motion system. Adv. Mech. Eng. 2019, 11, 168781401987142. [Google Scholar] [CrossRef] [Green Version]
- Chang, K.-M. Design of adaptive sliding mode controller for chaos synchronization. In Proceedings of the 2007 Mediterranean Conference on Control & Automation, Institute of Electrical and Electronics Engineers (IEEE), Athens, Greece, 27–29 June 2007; pp. 1–5. [Google Scholar]
- Rajagopal, K.; Laarem, G.; Karthikeyan, A.; Srinivasan, A.K. FPGA implementation of adaptive sliding mode control and genetically optimized PID control for fractional-order induction motor system with uncertain load. Adv. Differ. Eq. 2017, 2017, 273. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.; Liu, H.; Xiao, J.; Zhu, W.; Liu, Q.; Gong, G.; Huang, T. Continuous Friction Feedforward Sliding Mode Controller for a TriMule Hybrid Robot. IEEE/ASME Trans. Mechatron. 2018, 23, 1673–1683. [Google Scholar] [CrossRef]
- Jiang, W.; Wang, H.; Lu, J.; Cai, G.; Qin, W. Synchronization for chaotic systems via mixed-objective dynamic output feedback robust model predictive control. J. Frankl. Inst. 2017, 354, 4838–4860. [Google Scholar] [CrossRef]
- Taleb, M.; Plestan, F. Adaptive robust controller based on integral sliding mode concept. Int. J. Control. 2016, 89, 1788–1797. [Google Scholar] [CrossRef]
- Yan, X.; Estrada, A.; Plestan, F. Adaptive Pulse Output Feedback Controller Based on Second-Order Sliding Mode: Methodology and Application. IEEE Trans. Control. Syst. Technol. 2016, 24, 2233–2240. [Google Scholar] [CrossRef] [Green Version]
- Bourogaoui, M.; Sethom, H.B.A.; Belkhodja, I.S. Speed/position sensor fault tolerant control in adjustable speed drives—A review. ISA Trans. 2016, 64, 269–284. [Google Scholar] [CrossRef] [PubMed]
- Campa, R.; Kelly, R.; Santibáñez, V. Windows-based real-time control of direct-drive mechanisms: Platform description and experiments. Mechatronics 2004, 14, 1021–1036. [Google Scholar] [CrossRef]
- Gamazo-Real, J.C.; Vázquez-Sánchez, E.; Gomez-Gil, J. Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends. Sensors 2010, 10, 6901–6947. [Google Scholar] [CrossRef] [Green Version]
- Gan, M.-G.; Zhang, M.; Zheng, C.-Y.; Chen, J. An adaptive sliding mode observer over wide speed range for sensorless control of a brushless DC motor. Control. Eng. Proc. 2018, 77, 52–62. [Google Scholar] [CrossRef]
- Liu, X.; Liu, C.; Pong, P.W.T. Velocity Measurement Technique for Permanent Magnet Synchronous Motors Through External Stray Magnetic Field Sensing. IEEE Sens. J. 2018, 18, 4013–4021. [Google Scholar] [CrossRef]
- Malikan, M.; Eremeyev, V.A.; Żur, K.K. Effect of Axial Porosities on Flexomagnetic Response of In-Plane Compressed Piezomagnetic Nanobeams. Symmetry 2020, 12, 1935. [Google Scholar] [CrossRef]
- Lingling, Y.; Zhuo, M.; Jianqiu, B.; Yize, S. Non-Linear Dynamic Feature Analysis of a Multiple-Stage Closed-Loop Gear Transmission System for 3D Circular Braiding Machine. Symmetry 2020, 12, 1788. [Google Scholar]
- Cheng-Chi, W.; Chih-Jer, L. Bifurcation and Nonlinear Behavior Analysis of Dual-Directional Coupled Aerodynamic Bearing Systems. Symmetry 2020, 12, 1521. [Google Scholar]
- Das, S.; Nandi, D.; Neogi, B.; Sarkar, B. Nonlinear System Stability and Behavioral Analysis for Effective Implementation of Artificial Lower Limb. Symmetry 2020, 12, 1727. [Google Scholar] [CrossRef]
- Ammar, A.; Kheldoun, A.; Metidji, B.; Ameid, T.; Azzoug, Y. Feedback linearization based sensorless direct torque control using stator flux MRAS-sliding mode observer for induction motor drive. ISA Trans. 2020, 98, 382–392. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | |||
|---|---|---|---|
| LPF cut off frequency, Hz | 45 | 98 | 150 |
| NF central frequency, Hz | - | 45 | 110 |
| BF central frequency, Hz | - | - | 45 |
| BF type | - | - | Notch filter |
| Position loop P coefficient | 5 | 5 | 5 |
| Velocity loop P coefficient | 200 | 180 | 180 |
| Velocity loop I coefficient | 120 | 160 | 160 |
| Controller | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PID1 | PID2 | PID3 | ||||||||||
| Estimations of the dynamic displacement error, in nm | ||||||||||||
| Velocity, mm/s | min{Δe} | max{Δe} | min{Δe} | max{Δe} | min{Δe} | max{Δe} | ||||||
| 1 | −240.00 | 240.00 | 79.70 | 58.20 | −160.00 | 160.00 | 50.60 | −14.20 | −240.00 | 160.00 | 65.10 | −79.03 |
| 5 | −400.00 | 560.00 | 213.00 | 51.80 | −400.00 | 320.00 | 140.00 | −37.50 | −160.00 | 240.00 | 63.30 | 21.10 |
| 10 | −160.00 | 160.00 | 66.50 | −30.50 | −400.00 | 320.00 | 130.00 | 26.70 | −320.00 | 320.00 | 122.00 | 15.90 |
| 20 | −240.00 | 320.00 | 117.00 | 31.70 | −160.00 | 320.00 | 92.10 | 75.80 | −320.00 | 160.00 | 85.30 | −62.70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Piščalov, A.; Urbonas, E.; Višniakov, N.; Zabulionis, D.; Kilikevičius, A. Investigation of Position and Velocity Stability of the Nanometer Resolution Linear Motor Stage with Air Bearings by Shaping of Controller Transfer Function. Symmetry 2020, 12, 2062. https://doi.org/10.3390/sym12122062
Piščalov A, Urbonas E, Višniakov N, Zabulionis D, Kilikevičius A. Investigation of Position and Velocity Stability of the Nanometer Resolution Linear Motor Stage with Air Bearings by Shaping of Controller Transfer Function. Symmetry. 2020; 12(12):2062. https://doi.org/10.3390/sym12122062
Chicago/Turabian StylePiščalov, Artur, Edgaras Urbonas, Nikolaj Višniakov, Darius Zabulionis, and Artūras Kilikevičius. 2020. "Investigation of Position and Velocity Stability of the Nanometer Resolution Linear Motor Stage with Air Bearings by Shaping of Controller Transfer Function" Symmetry 12, no. 12: 2062. https://doi.org/10.3390/sym12122062
APA StylePiščalov, A., Urbonas, E., Višniakov, N., Zabulionis, D., & Kilikevičius, A. (2020). Investigation of Position and Velocity Stability of the Nanometer Resolution Linear Motor Stage with Air Bearings by Shaping of Controller Transfer Function. Symmetry, 12(12), 2062. https://doi.org/10.3390/sym12122062