Periodic, Quasi-Periodic, and Chaotic Motions to Diagnose a Crack on a Horizontally Supported Nonlinear Rotor System



Abstract
:1. Introduction
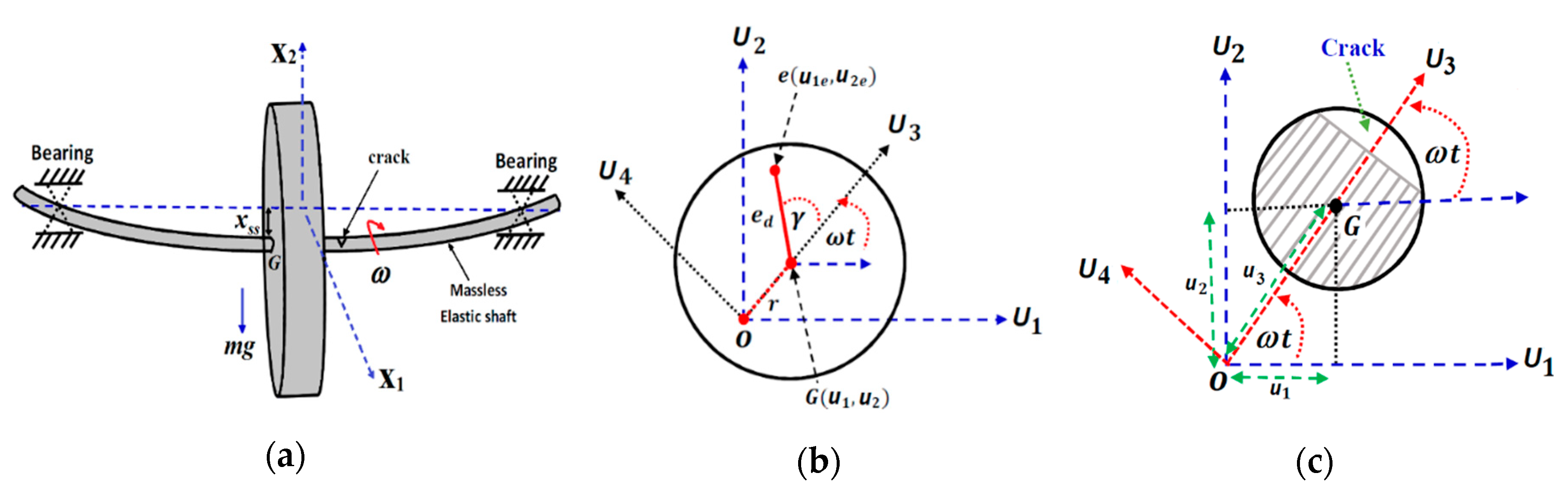
2. Mathematical Model
Crack-Breathing Mathematical Model
3. Numerical Analysis, Results, and Discussions
3.1. Horizontal Superharmonic Resonance ()
3.2. Vertical Superharmonic Resonance ()
3.3. Horizontal Subharmonic Resonance ()
3.4. Vertical Subharmonic Resonance ()
3.5. Primary Resonance Cases ( and )
4. Conclusions
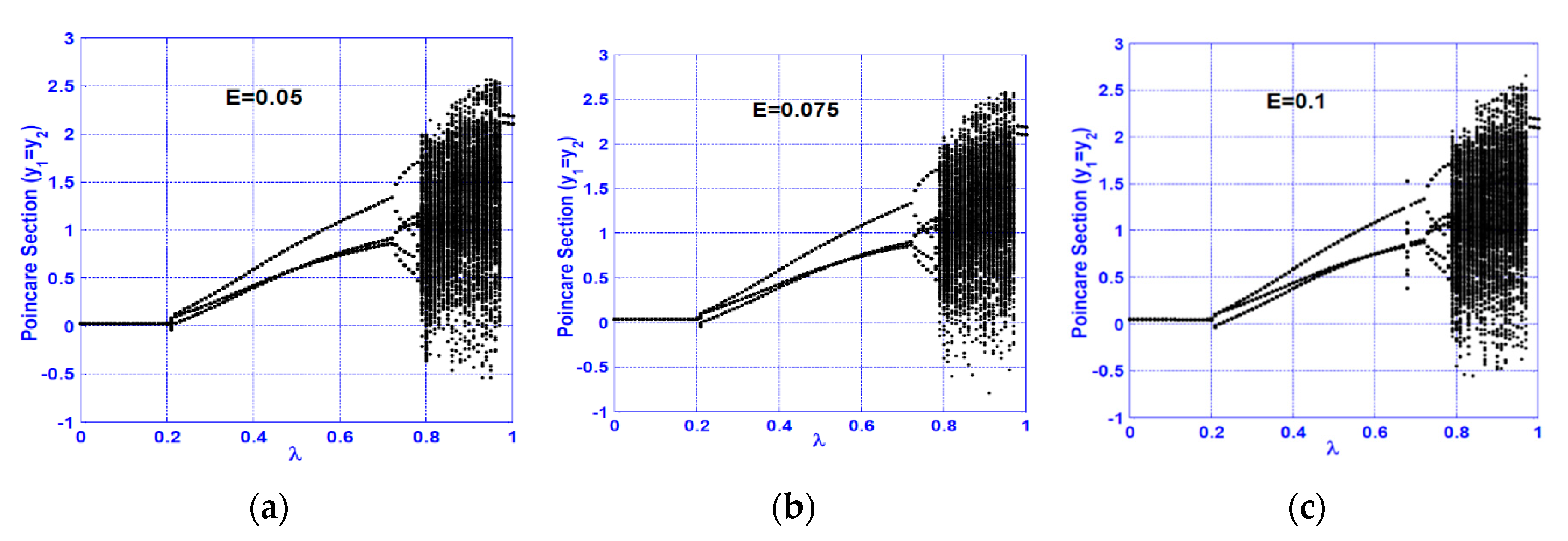
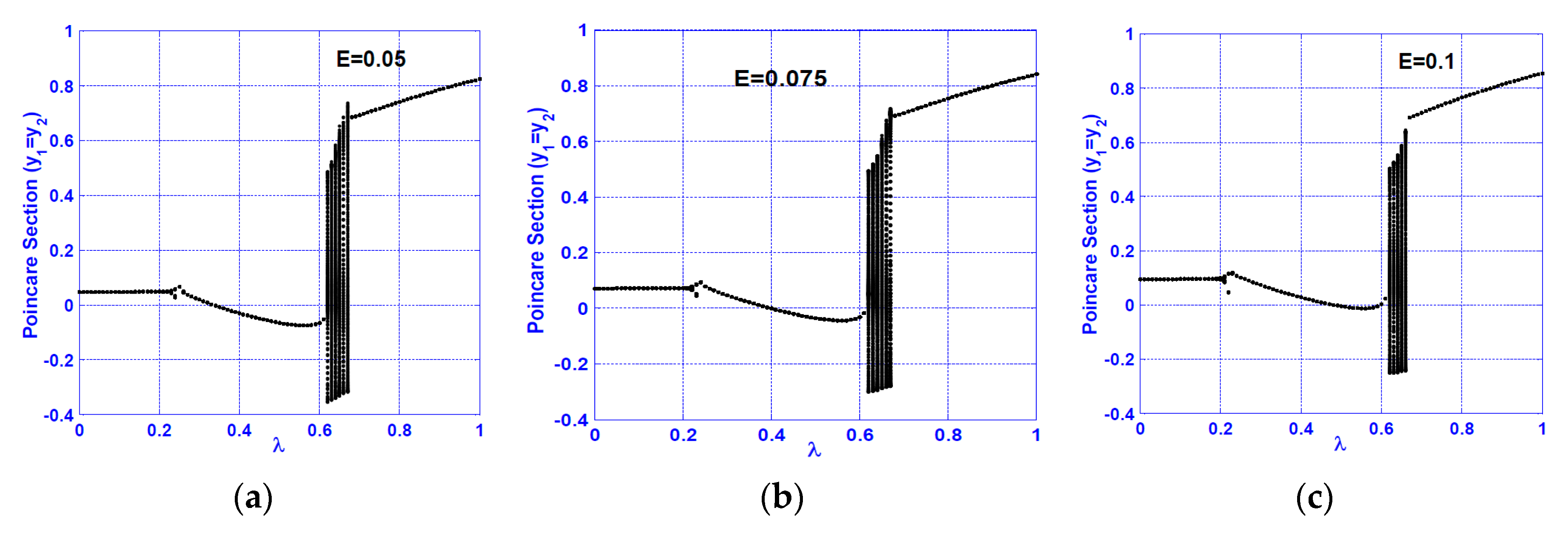
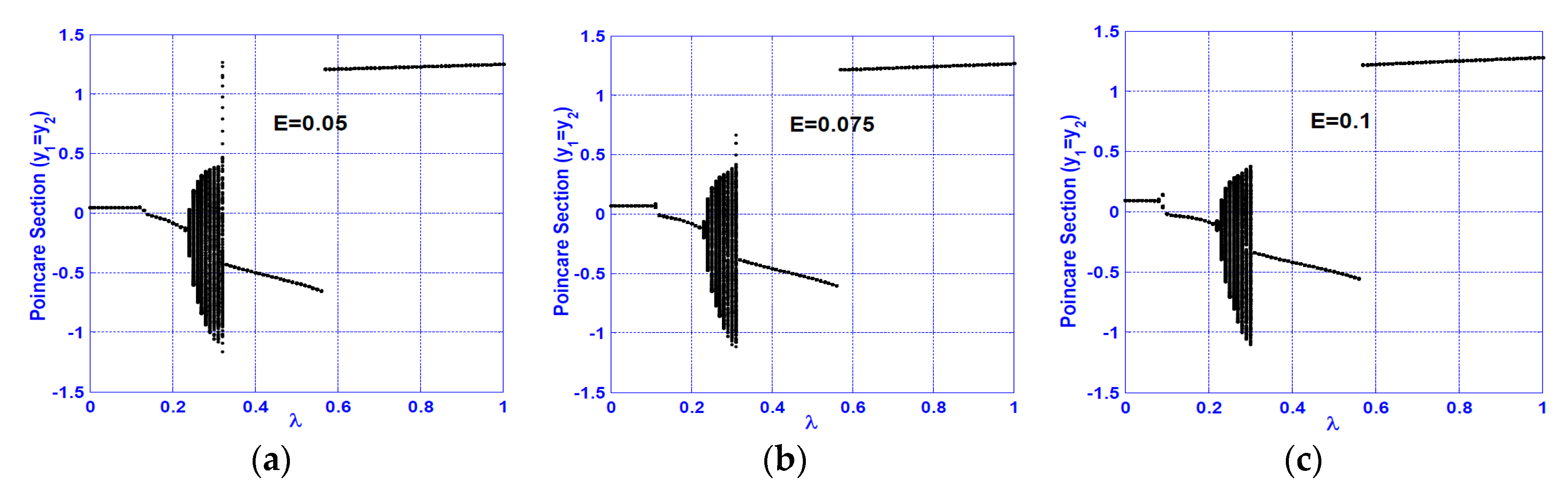
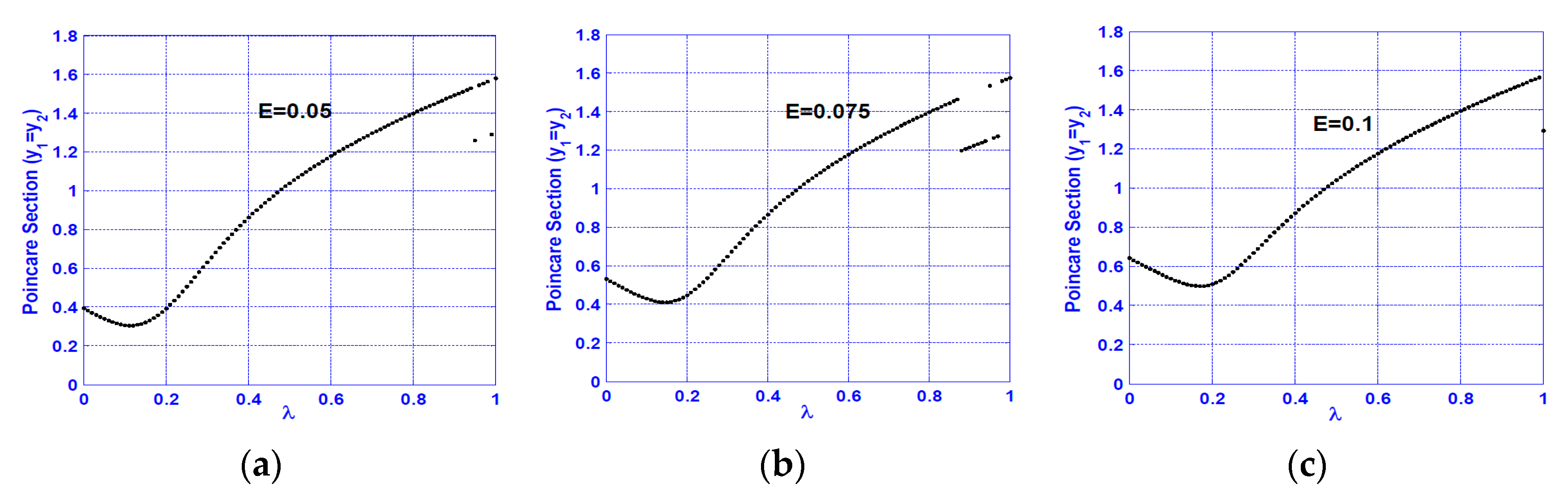
- Increasing the disk eccentricity does not influence the nature of the system motions at superharmonic and subharmonic resonances, but it can increase the oscillation amplitude at the primary resonance case only.
- The cracked system executes period-1 motions for different crack sizes for the horizontal primary resonance case, where there is no qualitative change for the system motion.
- The system motions are mostly period-1 for different crack sizes at the vertical primary resonance. However, the system may execute quasi-periodic motion at specific ranges of the crack size depending on the nonlinearity magnitude.
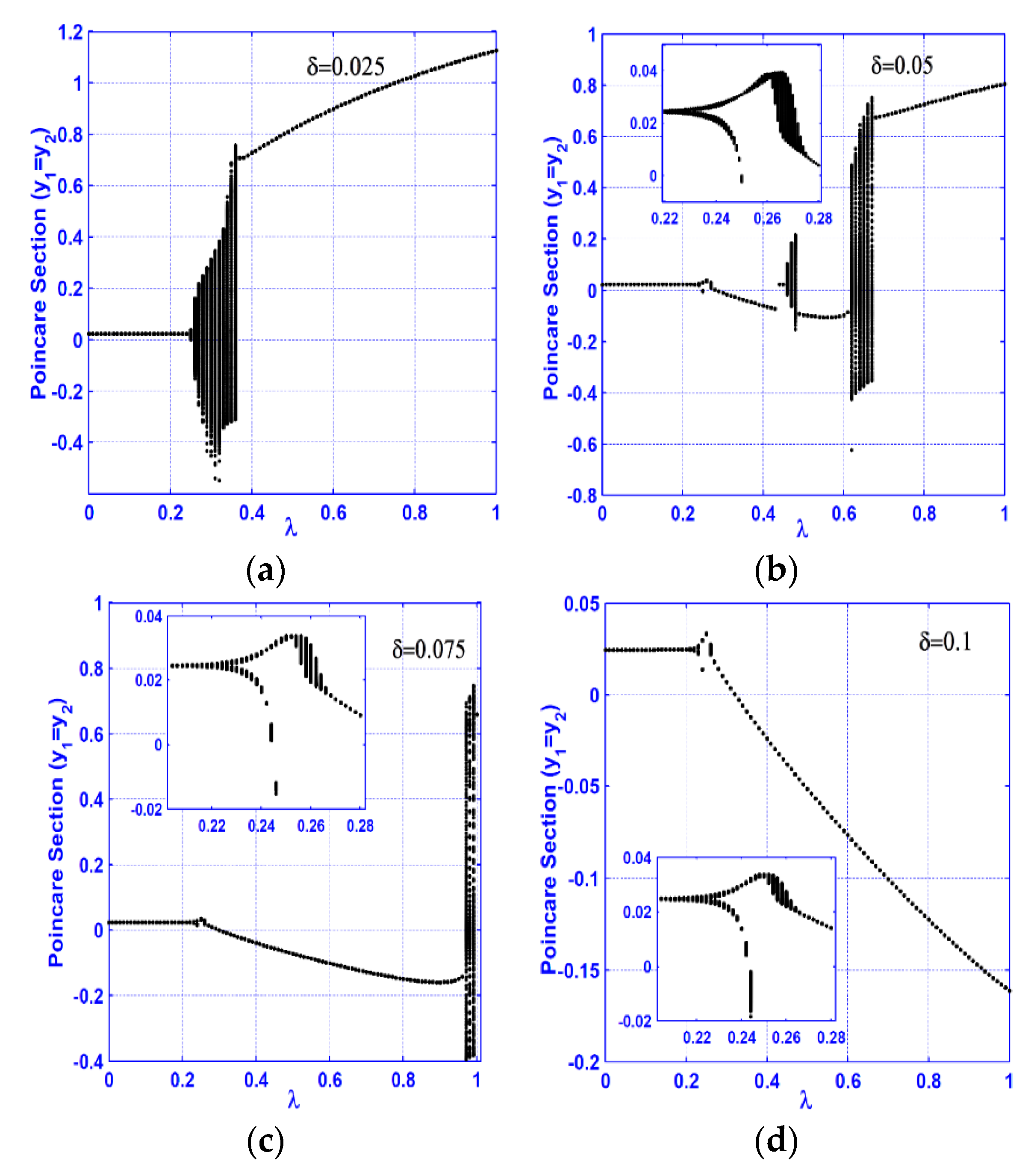
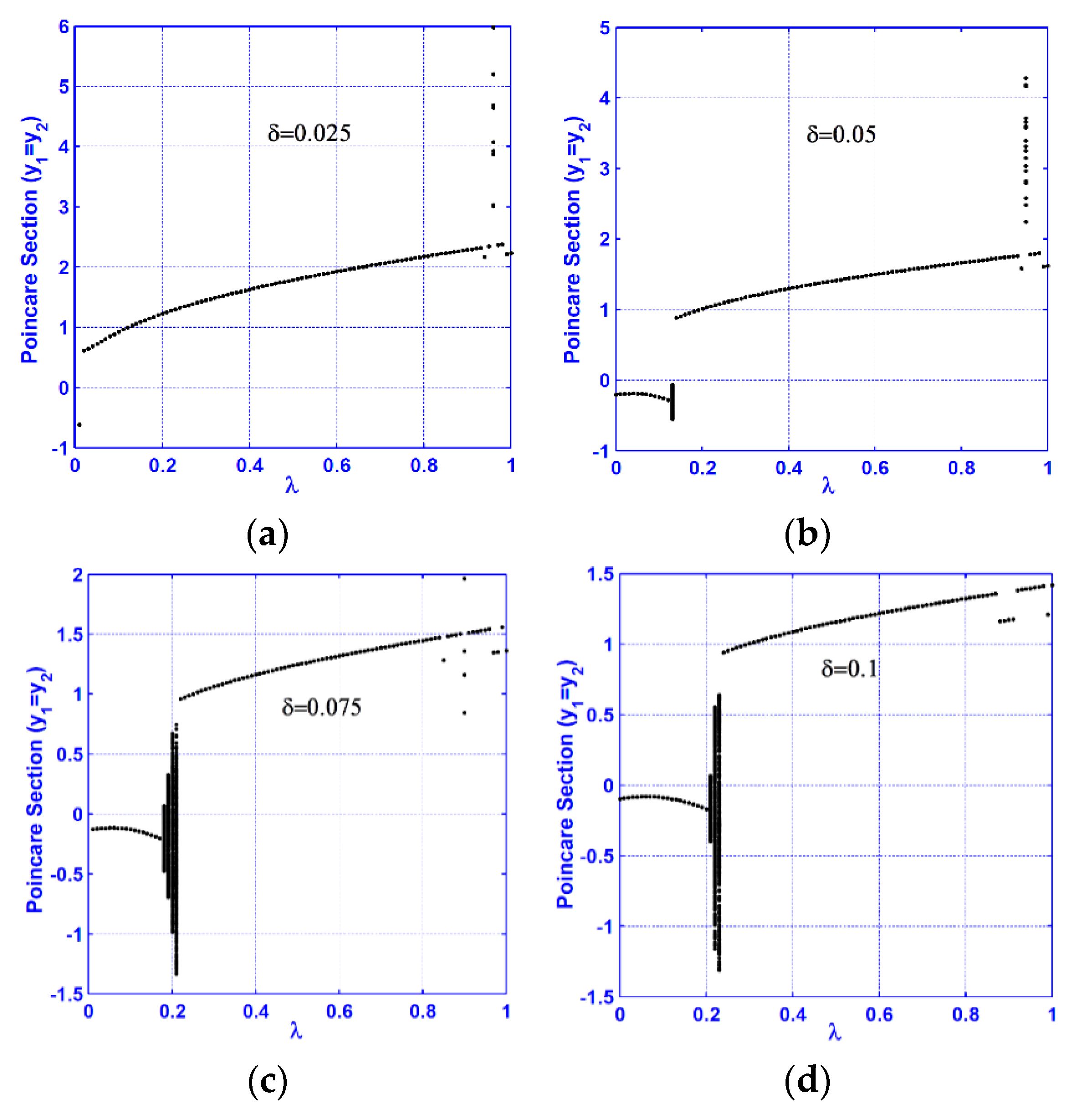
- In subharmonic resonance cases, the cracked system exhibits period-1 motion except at two isolated ranges of the crack size for which the system executes period-2 or quasi-periodic motion, depending on the nonlinearity magnitude.
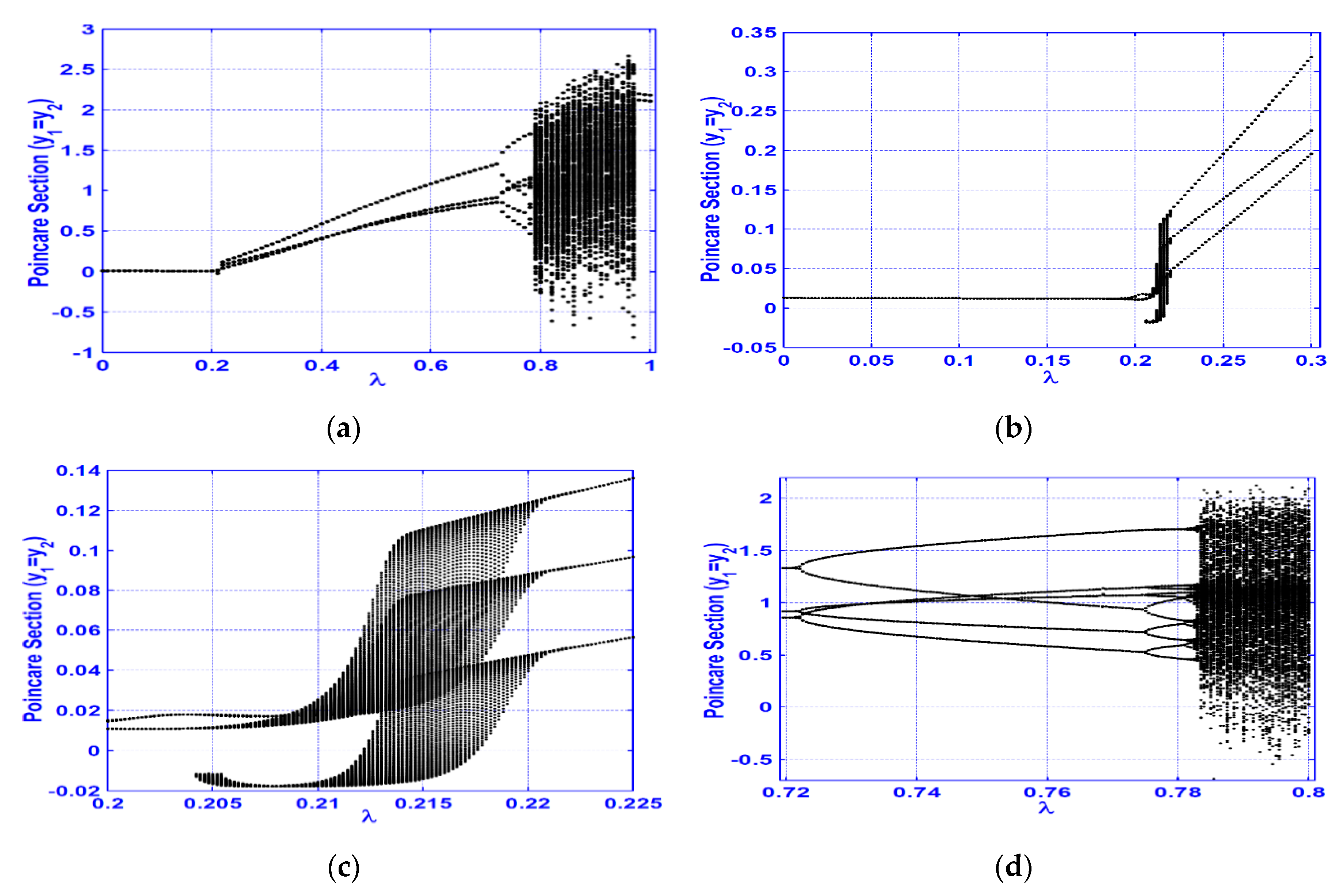
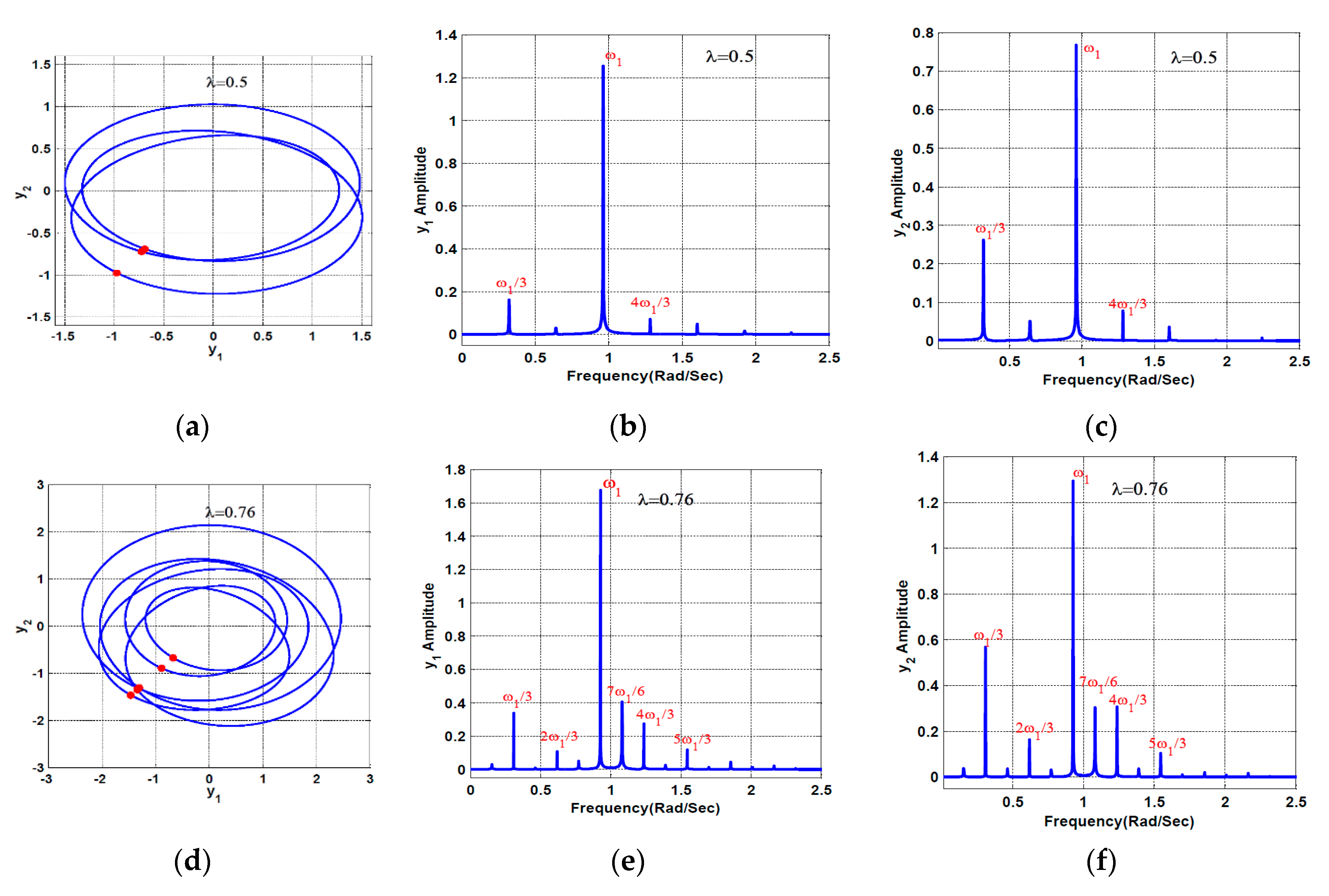
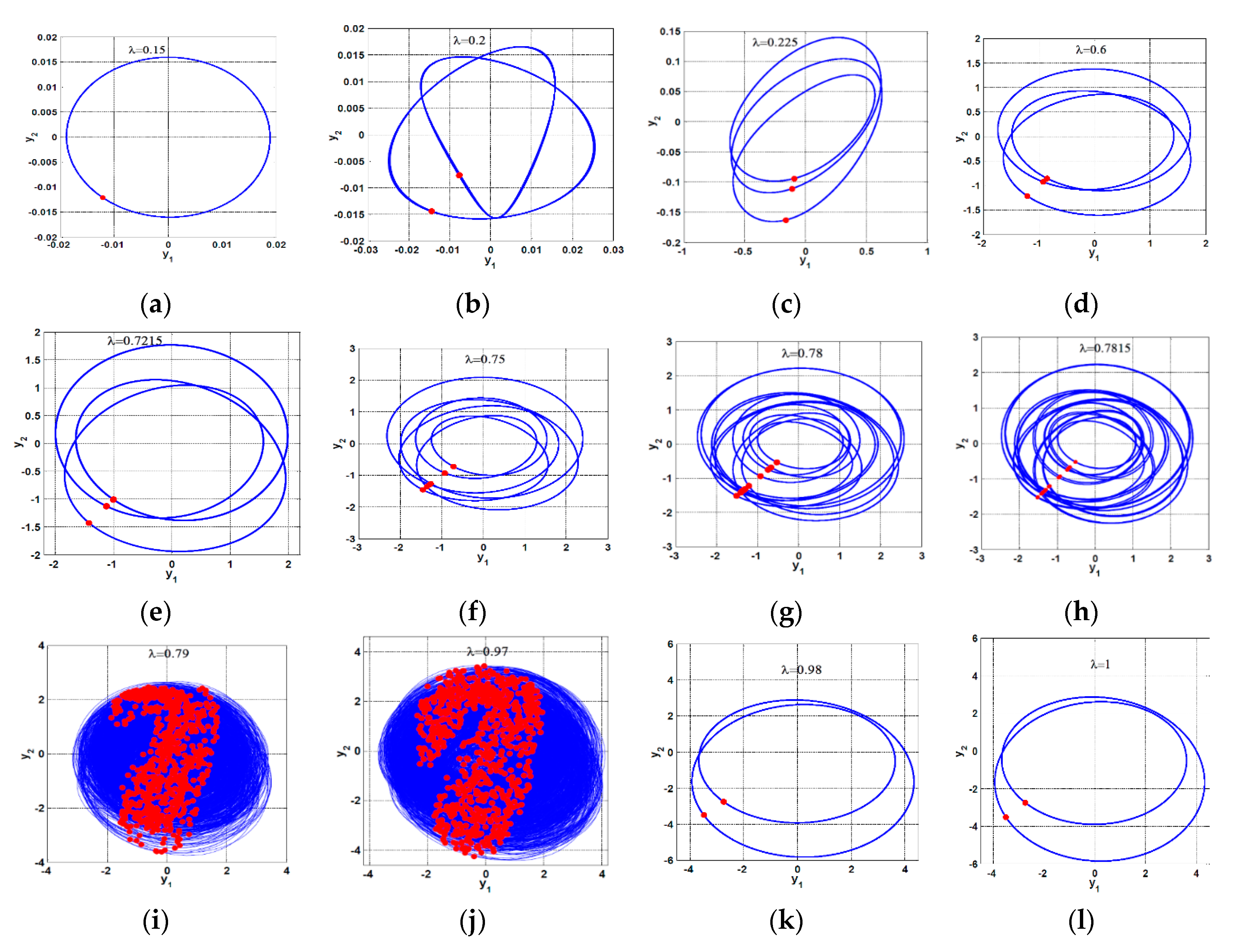
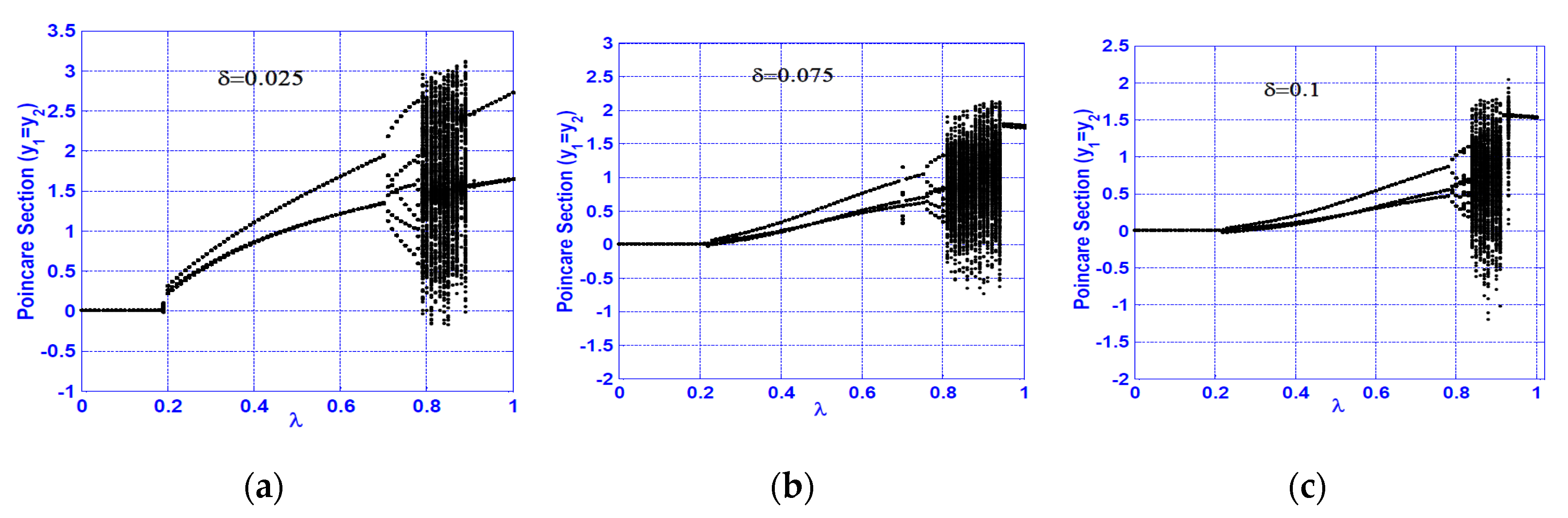
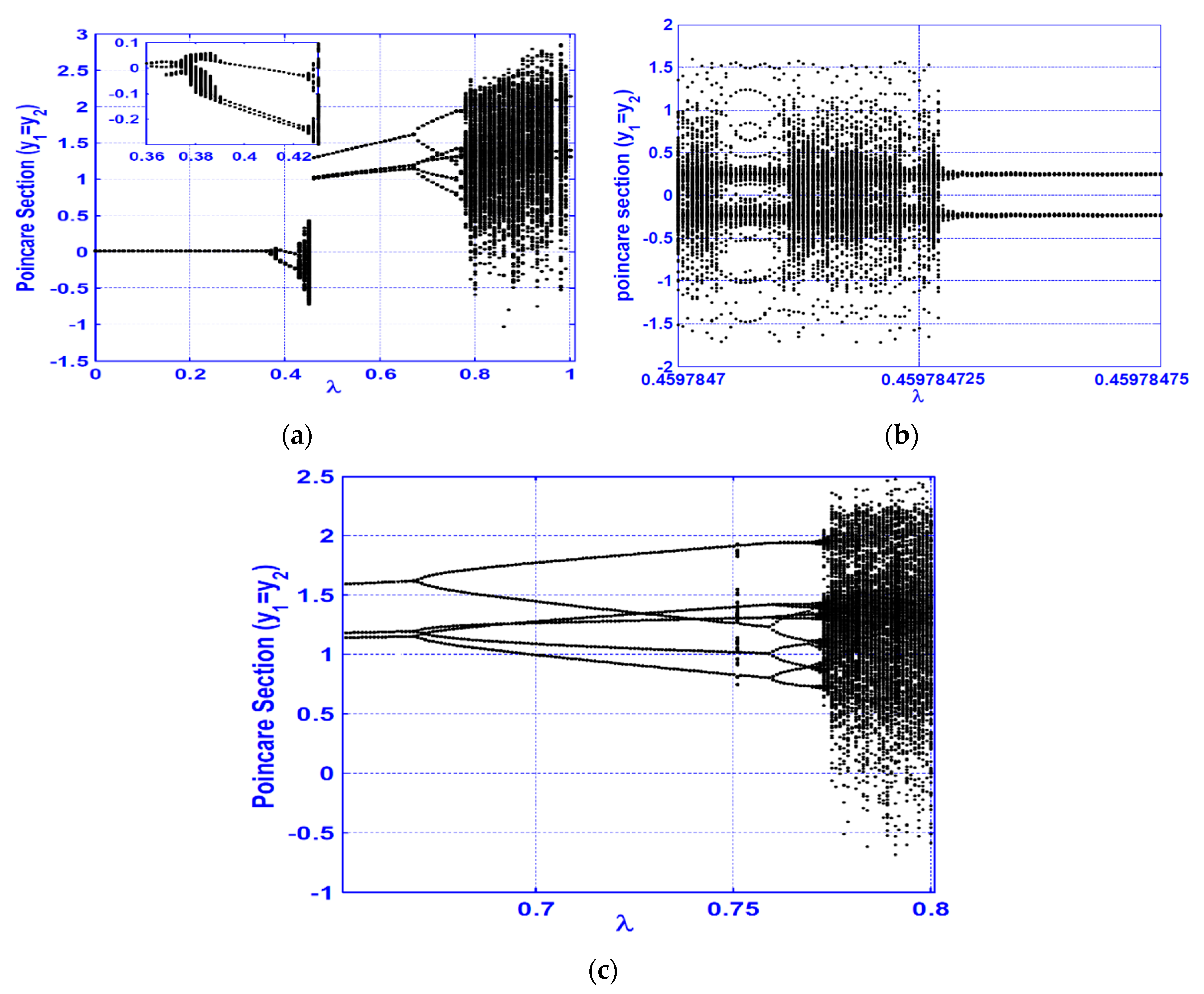
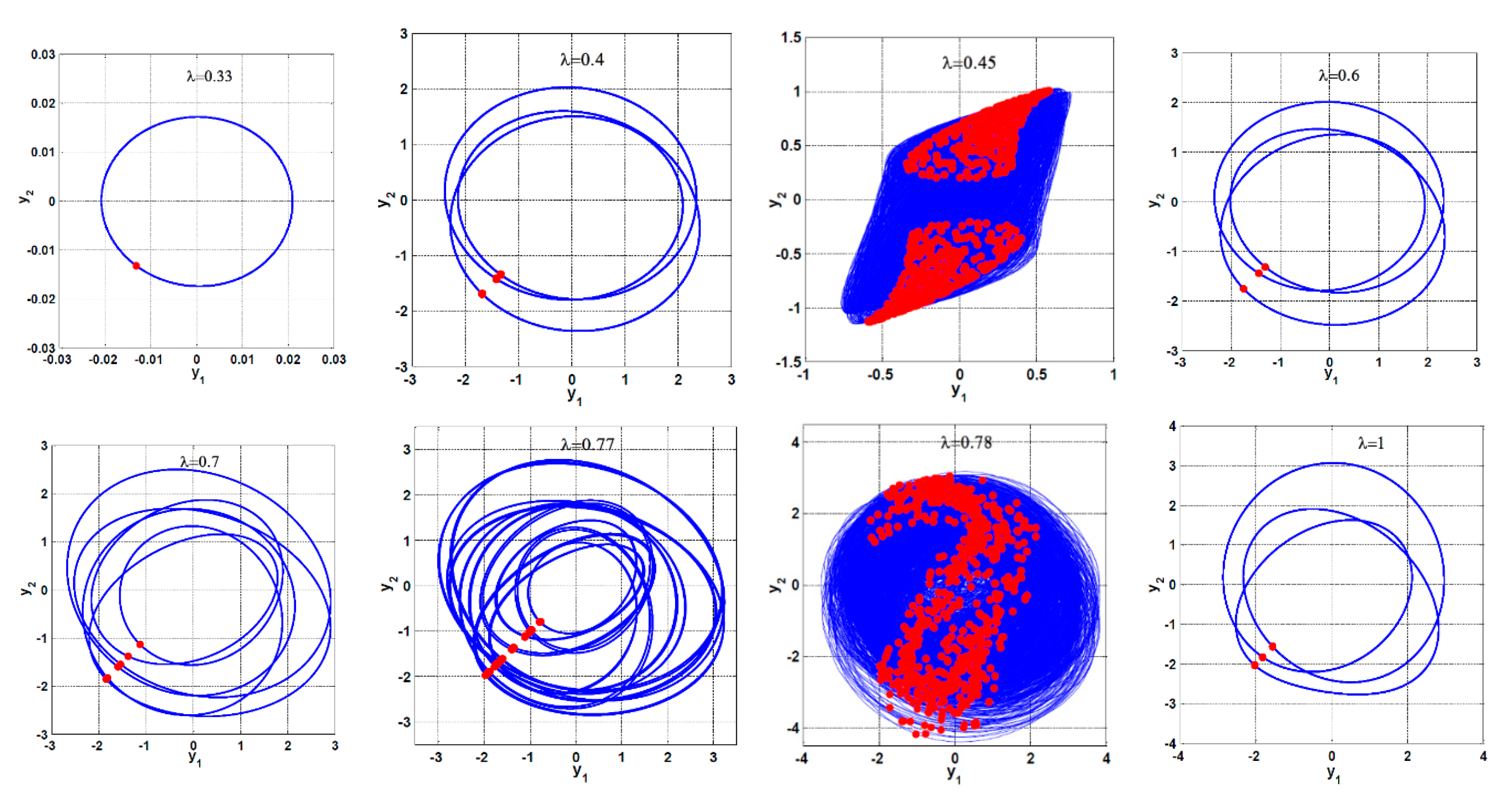
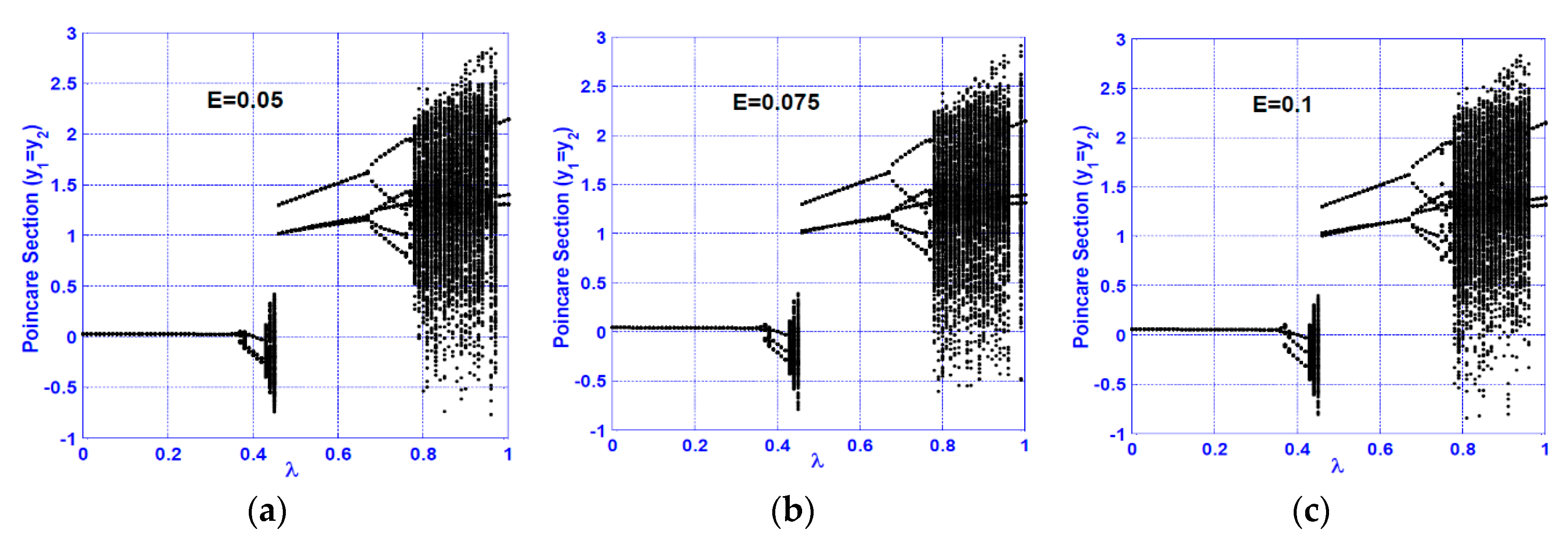
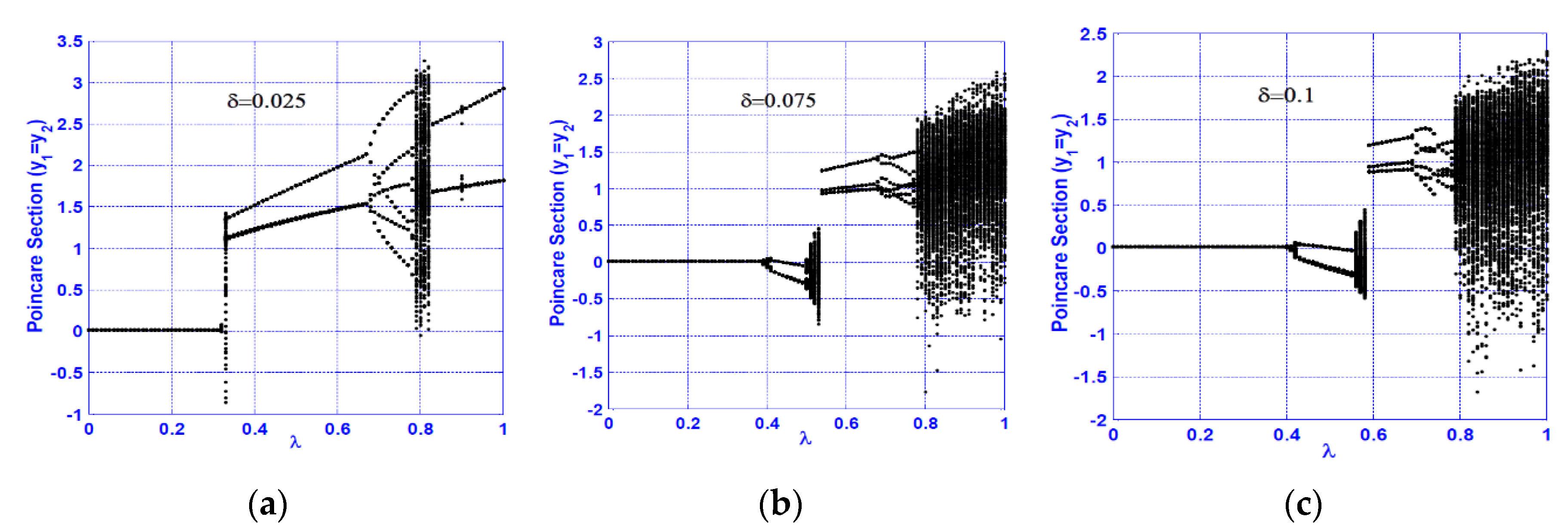
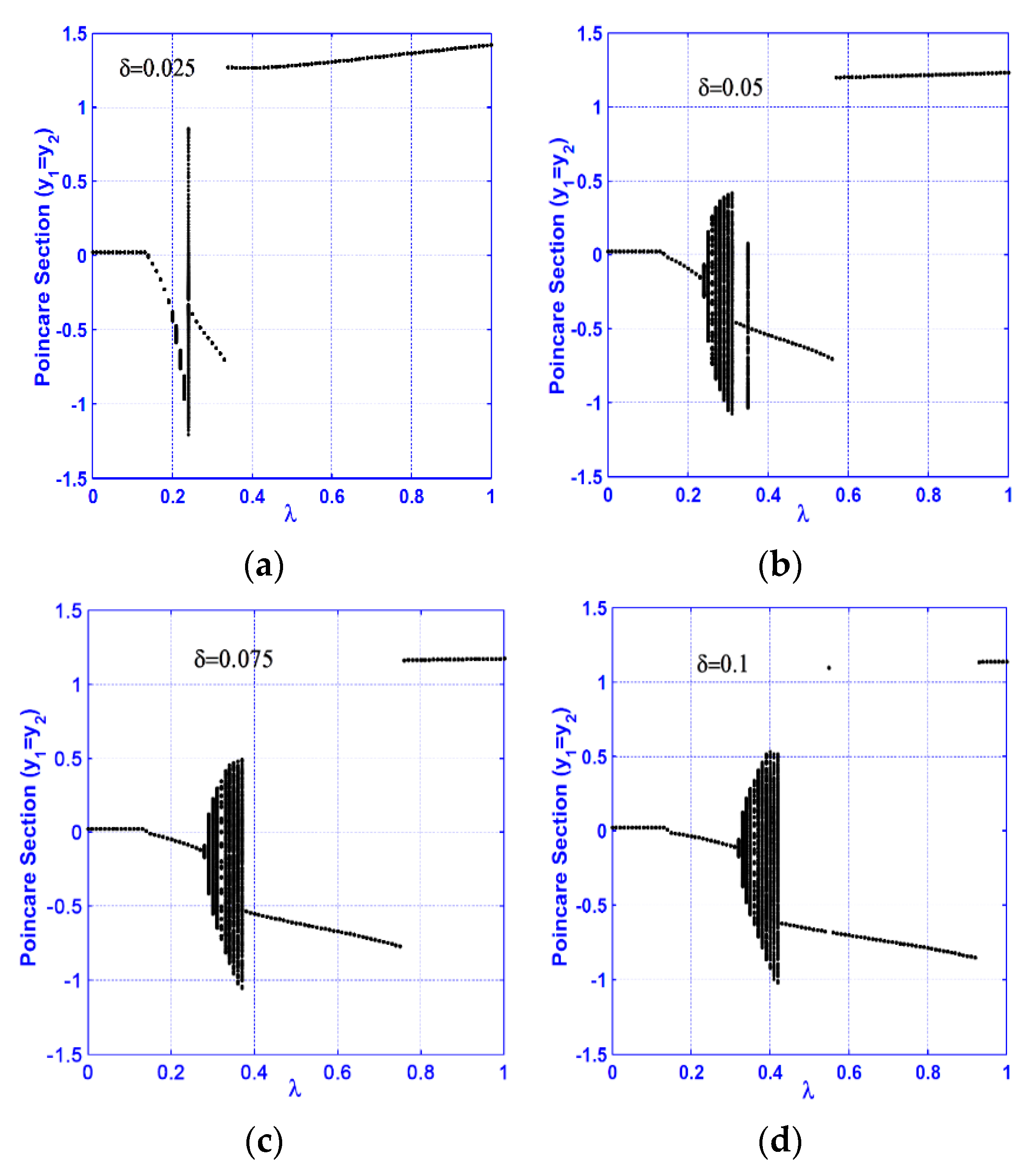
- A continuous qualitative change for the system motion is noticed as the crack size increases in the superharmonic resonance cases, where the system starts with period-1 motion, then exhibits period-2 followed by a quasi-periodic motion. The system exhibits period-3 motion followed by period-doubling bifurcation that led to a chaotic response, and finally, a sudden transition to the regular motion occurs.
- The system vibration for the horizontal superharmonic resonance case is more sensitive to small crack sizes than in the vertical superharmonic resonance.
- Based on the concluded points (1) to (6), the best resonance case that can be utilized to predict the crack size magnitude is the horizontal superharmonic resonance case (i.e., when ), in which when the crack size increases, the system executes period-1, period-2, quasi-periodic, period-3, period-doubling, chaotic, and period-2 motions, sequentially.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Displacement, velocity, and acceleration of the disk geometric center in the -direction. | |
| Displacement, velocity, and acceleration of the disk geometric center in the -direction. | |
| Linear damping coefficients in the and–directions, respectively. | |
| Linear natural frequencies of the horizontal and vertical directions, respectively. | |
| Quadratic and cubic nonlinearities coefficient. | |
| Disk spinning speed. | |
| Disk-eccentricity magnitude. | |
| A parameter representing the relative reduction of the shaft linear stiffness coefficient due to the crack. | |
| Orientation angle between the crack and imbalance directions |
Appendix A
References
- Ganesan, R. Dynamic response and stability of a rotor support system with non-symmetric bearing clearances. Mech. Mach. Theory 1996, 31, 781–798. [Google Scholar] [CrossRef]
- Kim, Y.; Noah, S. Quasi-periodic response and stability analysis for a non-linear Jeffcott rotor. J. Sound Vib. 1996, 190, 239–253. [Google Scholar] [CrossRef]
- Yabuno, H.; Kashimura, T.; Inoue, T.; Ishida, Y. Nonlinear normal modes and primary resonance of horizontally supported Jeffcott rotor. Nonlinear Dyn. 2011, 66, 377–387. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Gohary, H.A. On the nonlinear oscillations of a horizontally supported Jeffcott rotor with a nonlinear restoring force. Nonlinear Dyn. 2017, 88, 293–314. [Google Scholar] [CrossRef]
- Saeed, N.A. On vibration behavior and motion bifurcation of a nonlinear asymmetric rotating shaft. Arch. Appl. Mech. 2019, 89, 1899–1921. [Google Scholar] [CrossRef]
- Saeed, N.A. On the steady-state forward and backward whirling motion of asymmetric nonlinear rotor system. Eur. J. Mech. A Solids 2020, 80, 103878. [Google Scholar] [CrossRef]
- Huang, J.; Luo, A.C.J. Periodic Motions and Bifurcation Trees in a Buckled, Nonlinear Jeffcott Rotor System. Int. J. Bifurc. Chaos 2015, 25, 1550002. [Google Scholar] [CrossRef]
- Huang, J.; Luo, A.C.J. Analytical solutions of period-1 motions in a buckled, nonlinear Jeffcott rotor system. Int. J. Dyn. Control 2016, 4, 376–383. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Z.; Luo, A.C.J. On bifurcation trees of period-1 to period-2 motions in a nonlinear Jeffcott rotor system. Int. J. Mech. Sci. 2019, 160, 429–450. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Z.; Luo, A.C.J. An independent period-3 motion to chaos in a nonlinear flexible rotor system. Int. J. Dyn. Control 2020, 8, 337–351. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Z.; Luo, A.C.J. Period-1 Motion to Chaos in a Nonlinear Flexible Rotor System. Int. J. Bifurc. Chaos 2020, 30, 2050077. [Google Scholar] [CrossRef]
- Xu, Y.; Luo, A.C.J. Period-1 to period-8 motions in a nonlinear Jeffcott rotor system. J. Comput. Nonlinear Dyn. 2020, 15, 091012. [Google Scholar] [CrossRef]
- Ishida, Y.; Inoue, T. Vibration Suppression of nonlinear rotor systems using a dynamic damper. J. Vib. Control 2007, 13, 1127–1143. [Google Scholar] [CrossRef]
- Eissa, M.; Saeed, N.A.; El-Ganini, W.A. Saturation-based active controller for vibration suppression of a four-degree-of-freedom rotor–AMB system. Nonlinear Dyn. 2014, 76, 743–764. [Google Scholar] [CrossRef]
- Saeed, N.A.; Kamel, M. Nonlinear PD-controller to suppress the nonlinear oscillations of horizontally supported Jeffcott-rotor system. Int. J. NonLinear Mech. 2016, 87, 109–124. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Ganaini, W.A. Time-delayed control to suppress the nonlinear vibrations of a horizontally suspended Jeffcott-rotor system. Appl. Math. Model. 2017, 44, 523–539. [Google Scholar] [CrossRef]
- Saeed, N.A.; El-Ganaini, W.A. Utilizing time-delays to quench the nonlinear vibrations of a two-degree-of-freedom system. Meccanica 2017, 52, 2969–2990. [Google Scholar] [CrossRef]
- Saeed, N.A.; Kamel, M. Active magnetic bearing-based tuned controller to suppress lateral vibrations of a nonlinear Jeffcott-rotor system. Nonlinear Dyn. 2017, 90, 457–478. [Google Scholar] [CrossRef]
- Eissa, M.; Saeed, N.A. Nonlinear vibration control of a horizontally supported Jeffcott-rotor system. J. Vib. Control 2018, 24, 5898–5921. [Google Scholar] [CrossRef]
- Mobayen, S.; Ma, J. Robust finite-time composite nonlinear feedback control for synchronization of uncertain chaotic systems with nonlinearity and time-delay. Chaos Solitons Fractals 2018, 114, 46–54. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Khooban, M.H. Sliding mode disturbance observer control based on adaptive synchronization in a class of fractional-order chaotic systems. Int. J. Adapt Control Signal Process 2019, 33, 462–474. [Google Scholar] [CrossRef]
- Vaseghi, B.; Pourmina, M.A.; Mobayen, S. Finite-time chaos synchronization and its application in wireless sensor networks. Transact. Inst. Meas. Control 2018, 40, 3788–3799. [Google Scholar] [CrossRef]
- Mobayen, S.; Vaidyanathan, S.; Sambas, A.; Kaçar, S.; Çavusoglu, U. A Novel Chaotic System with Boomerang-Shaped Equilibrium, Its Circuit Implementation and Application to Sound Encryption. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 1–12. [Google Scholar] [CrossRef]
- Wauer, J. On the dynamics of cracked rotors: Literature survey. Appl. Mech. Rev. 1990, 43, 13–17. [Google Scholar] [CrossRef]
- Dimarogonas, A. Vibration of cracked structures: A state of the art review. Eng. Fract. Mech. 1996, 55, 831–857. [Google Scholar] [CrossRef]
- Gasch, R. A survey of the dynamic behavior of a simple rotating shaft with a transverse crack. J. Sound Vib. 1993, 160, 313–332. [Google Scholar] [CrossRef]
- Jun, O.S.; Eun, H.J.; Earmme, Y.Y.; Lee, C.W. Modelling and vibration analysis of a simple rotor with breathing crack. J. Sound Vib. 1992, 155, 273–290. [Google Scholar] [CrossRef]
- Sinou, J.-J.; Lees, A.W. The influence of cracks in rotating shafts. J. Sound Vib. 2005, 285, 1015–1037. [Google Scholar] [CrossRef] [Green Version]
- Sinou, J.-J. Effects of a crack on the stability of a non-linear rotor system. Int. J. Nonlinear Mech. 2007, 42, 959–972. [Google Scholar] [CrossRef] [Green Version]
- Sinou, J.-J.; Lees, A.W. A non-linear study of a cracked rotor. Eur. J. Mech. A Solids 2007, 26, 152–170. [Google Scholar] [CrossRef] [Green Version]
- Sinou, J.-J. Detection of cracks in rotor based on the 2× and 3× super-harmonic frequency components and the crack unbalance interactions. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 2024–2040. [Google Scholar] [CrossRef] [Green Version]
- Chen, C.; Dai, L.; Fu, Y. Nonlinear response and dynamic stability of a cracked rotor. Commun. Nonlinear Sci. Numer. Simul. 2007, 12, 1023–1037. [Google Scholar] [CrossRef]
- Han, Q.K.; Chu, F.L. Parametric instability of a rotor bearing system with two breathing transverse cracks. Eur. J. Mech. A Solids 2012, 36, 180–190. [Google Scholar] [CrossRef]
- Khorrami, H.; Rakheja, S.; Sedaghati, R. Vibration behavior of a two-crack shaft in a rotor disc-bearing system. Mech. Mach. Theory 2017, 113, 67–84. [Google Scholar] [CrossRef]
- Dai, L.M.; Chen, C.P. Dynamic stability analysis of a cracked nonlinear rotor system subjected to periodic excitations in machining. J. Vib. Control 2007, 13, 537–556. [Google Scholar] [CrossRef]
- Lin, Y.; Chu, F. Numerical and experimental investigations of flexural vibrations of a rotor system with transverse or slant crack. J. Sound Vib. 2009, 324, 107–125. [Google Scholar] [CrossRef]
- AL-Shudeifat, M.A.; Butcher, E.A.; Stern, C.R. General harmonic balance solution of a cracked rotor-bearing-disc system for harmonic and sub-harmonic analysis: Analytical and experimental approach. Int. J. Eng. Sci. 2010, 48, 921–935. [Google Scholar] [CrossRef]
- Yongcun, C.; Sier, D.; Wenhu, Z.; Guoding, C. The impact of roller dynamic unbalance of high-speed cylindrical roller bearing on the cage nonlinear dynamic characteristics. Mech. Mach. Theory 2017, 118, 65–83. [Google Scholar] [CrossRef]
- Gritli, H.; Belghith, S. Diversity in the nonlinear dynamic behavior of a one-degree-of-freedom impact mechanical oscillator under OGY-based state-feedback control law: Order, chaos and exhibition of the border-collision bifurcation. Mech. Mach. Theory 2018, 124, 1–41. [Google Scholar] [CrossRef]
- Tian, Q.; Flores, P.; Lankarani, H.M. A comprehensive survey of the analytical, numerical and experimental methodologies for dynamics of multibody mechanical systems with clearance or imperfect joints. Mech. Mach. Theory 2018, 122, 1–57. [Google Scholar] [CrossRef]
- Jun, O.S.; Gadala, M.S. Dynamic behavior analysis of cracked rotor. J. Sound Vib. 2008, 309, 210–245. [Google Scholar] [CrossRef]
- Jun, O.S. Dynamic behavior analysis of cracked rotor based on harmonic motion. Mech. Syst. Signal Process. 2012, 30, 186–203. [Google Scholar] [CrossRef]
- Ishida, Y. Cracked rotors Industrial machine case histories and nonlinear effects shown by simple Jeffcott rotor. Mech. Syst. Signal Process. 2008, 22, 805–817. [Google Scholar] [CrossRef]
- Hou, L.; Chen, Y.; Lu, Z.; Li, Z. Bifurcation analysis for 2:1 and 3:1 super-harmonic resonances of an aircraft cracked rotor system due to maneuver load. Nonlinear Dyn. 2015, 81, 531–547. [Google Scholar] [CrossRef]
- Cheng, L.; Li, N.; Chen, X.F.; He, Z.J. The influence of crack breathing and imbalance orientation angle on the characteristics of the critical speed of a cracked rotor. J. Sound Vib. 2011, 330, 2031–2048. [Google Scholar] [CrossRef]
- Saeed, N.A.; Eissa, M. Bifurcations of periodic motion of a horizontally supported nonlinear Jeffcott rotor system having transversely cracked shaft. Int. J. Nonlinear Mech. 2018, 101, 113–130. [Google Scholar] [CrossRef]
- Saeed, N.A.; Eissa, M. Bifurcation analysis of a transversely cracked nonlinear Jeffcott rotor system at different resonance cases. Int. J. Acoust. Vib. 2019, 24, 284–302. [Google Scholar] [CrossRef]
- Quinn, D.D.; Mani, G.; Kasarda, M.E.F.; Bash, T.; Inman, D.J.; Kirk, R.G. Damage detection of a rotating cracked shaft using an active magnetic bearing as a force actuator—analysis and experimental verification. IEEE/ASME Transact. Mech. 2005, 10, 640–647. [Google Scholar] [CrossRef]
- Hu, H.; Dong, G.; Peng, B.; Xing, J.; Song, W. Method for detecting micron cracks on a magnetic rotor surface based on a support vector machine. IEEE Access 2018, 6, 53141–53152. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, J.; Wang, Z.F.; Zhang, X.; Gao, Y.; Sui, Q.; Jiang, P. A Deep-learning-based multiple defect detection method for tunnel lining damages. IEEE Access 2019, 7, 182643–182657. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, X.; Jiang, H.; Zhou, J.; Qiao, S.; Wang, C.; Ma, T. Comparative study on dynamic characteristics of two-stage gear system with gear and shaft cracks considering the shaft flexibility. IEEE Access 2020, 8, 133681–133699. [Google Scholar] [CrossRef]
- Hou, L.; Chen, Y.; Cao, Q.; Lu, Z. Nonlinear vibration analysis of a cracked rotor-ball bearing system during flight maneuvers. Mech. Mach. Theory 2016, 105, 515–528. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Ramachandran, B. Applied Nonlinear Dynamics: Analytical, Computational, and Experimental Methods; Wiley-VCH: Weinheim, Germany, 2004. [Google Scholar]
- Chávez, J.P.; Hamaneh, V.V.; Wiercigroch, M. Modelling and experimental verification of an asymmetric Jeffcott rotor with radial clearance. J. Sound Vib. 2015, 334, 86–97. [Google Scholar]
- Chang-Jian, C.-W.; Chen, C.-K. Couple stress fluid improve rub-impact rotor-bearing system–Nonlinear dynamic analysis. Appl. Math. Model. 2010, 34, 1763–1778. [Google Scholar] [CrossRef]
- Karpenko, E.V.; Wiercigroch, M.; Pavlovskaia, E.E.; Neilson, R.D. Experimental verification of Jeffcott rotor model with preloaded snubber ring. J. Sound Vib. 2006, 298, 907–917. [Google Scholar] [CrossRef]
- Gritli, H.; Belghith, S. Displayed phenomena in the semi-passive torso-driven biped model under OGY based control method: Birth of atorus bifurcation. Appl. Math. Model. 2016, 40, 2946–2967. [Google Scholar] [CrossRef]
- Nayfeh, A. Resolving controversies in the application of the method of multiple scales and the generalized method of averaging. Nonlinear Dyn. 2005, 40, 61–102. [Google Scholar] [CrossRef]
- Nayfeh, A.; Mook, D. Nonlinear Oscillations; Wiley: New York, NY, USA, 1995. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Resonance Case | System Motion For Different Crack Size | Applicable for Cracks Diagnosis | Applicable for Crack Sizes Prediction |
|---|---|---|---|---|
| 1. | Horizontal superharmonic resonance () | Period-n, quasiperiodic, and chaotic motions | Yes | Yes |
| 2. | Vertical superharmonic resonance () | Period-n, quasiperiodic, and chaotic motions | Yes | No |
| 3. | Horizontal subharmonic resonance () | period-1, period-2, and quasi-periodic motions | No | No |
| 4. | Vertical subharmonic resonance () | period-1, period-2, and quasi-periodic motions | No | No |
| 5. | Horizontal Primary resonance () | period-1, and quasi-periodic motions | No | No |
| 6. | Vertical Primary resonance () | period-1, and quasi-periodic motions | No | No |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, N.A.; Mohamed, M.S.; Elagan, S.K. Periodic, Quasi-Periodic, and Chaotic Motions to Diagnose a Crack on a Horizontally Supported Nonlinear Rotor System. Symmetry 2020, 12, 2059. https://doi.org/10.3390/sym12122059
Saeed NA, Mohamed MS, Elagan SK. Periodic, Quasi-Periodic, and Chaotic Motions to Diagnose a Crack on a Horizontally Supported Nonlinear Rotor System. Symmetry. 2020; 12(12):2059. https://doi.org/10.3390/sym12122059
Chicago/Turabian StyleSaeed, Nasser A., Mohamed S. Mohamed, and Sayed K. Elagan. 2020. "Periodic, Quasi-Periodic, and Chaotic Motions to Diagnose a Crack on a Horizontally Supported Nonlinear Rotor System" Symmetry 12, no. 12: 2059. https://doi.org/10.3390/sym12122059
APA StyleSaeed, N. A., Mohamed, M. S., & Elagan, S. K. (2020). Periodic, Quasi-Periodic, and Chaotic Motions to Diagnose a Crack on a Horizontally Supported Nonlinear Rotor System. Symmetry, 12(12), 2059. https://doi.org/10.3390/sym12122059