An Approach for the Global Stability of Mathematical Model of an Infectious Disease


 ,
,  , , ,
, , ,
Abstract
1. Introduction
2. The Mathematical Model
2.1. Equilibrium of the Model for Fixed Controls
2.2. Boundedness
3. Global Stability of the Endemic Equilibrium
- Step 1.
- It is obvious that .
- Step 2.
- By using (L2), we shall prove that the matrix is diagonal stable. From (5), we obtainObviously, and . It remains to show that :then we havetherefore is diagonal stable.
- Step 3.
- Now, we must show that is diagonal stable. Let us consider the as following:where,
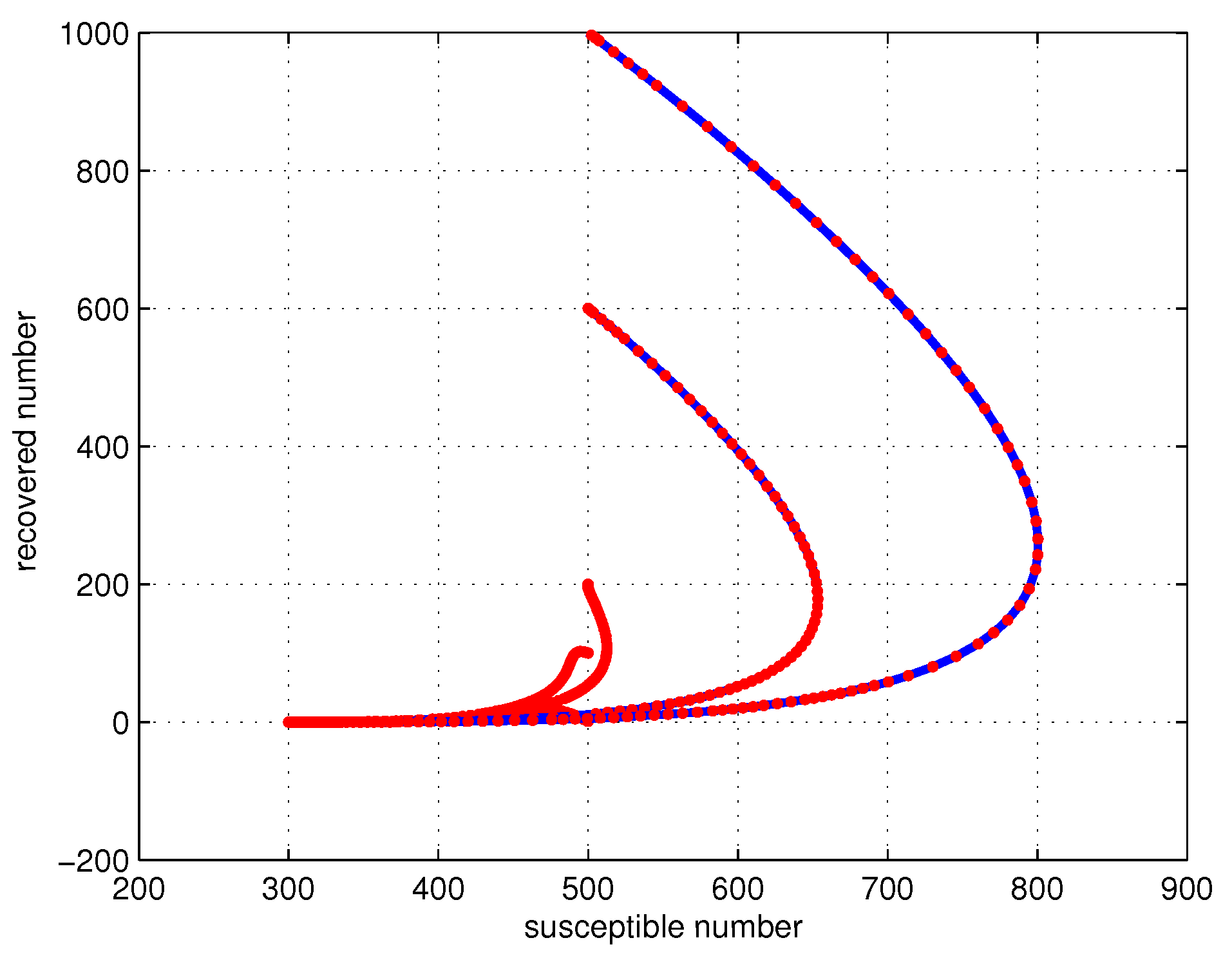
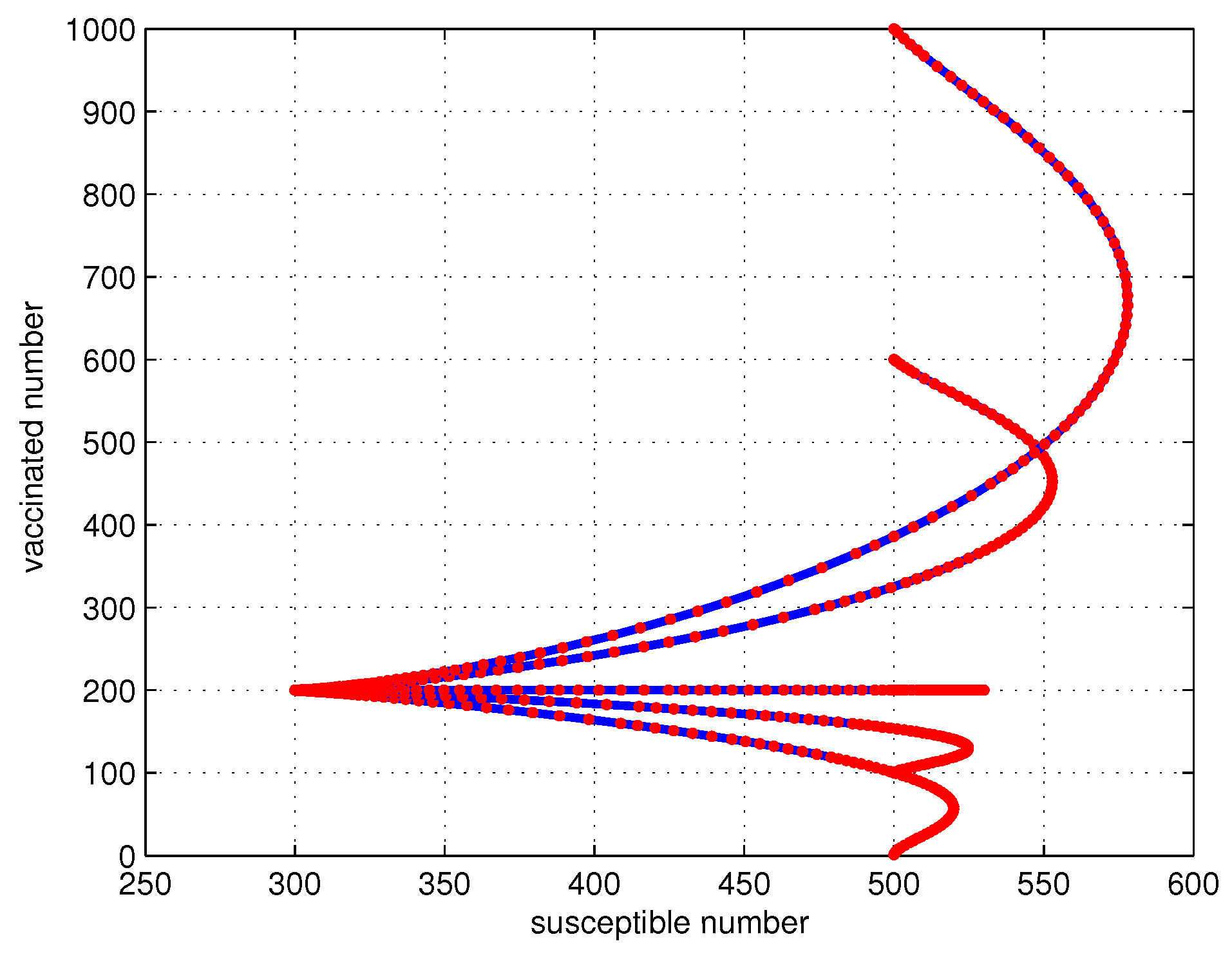
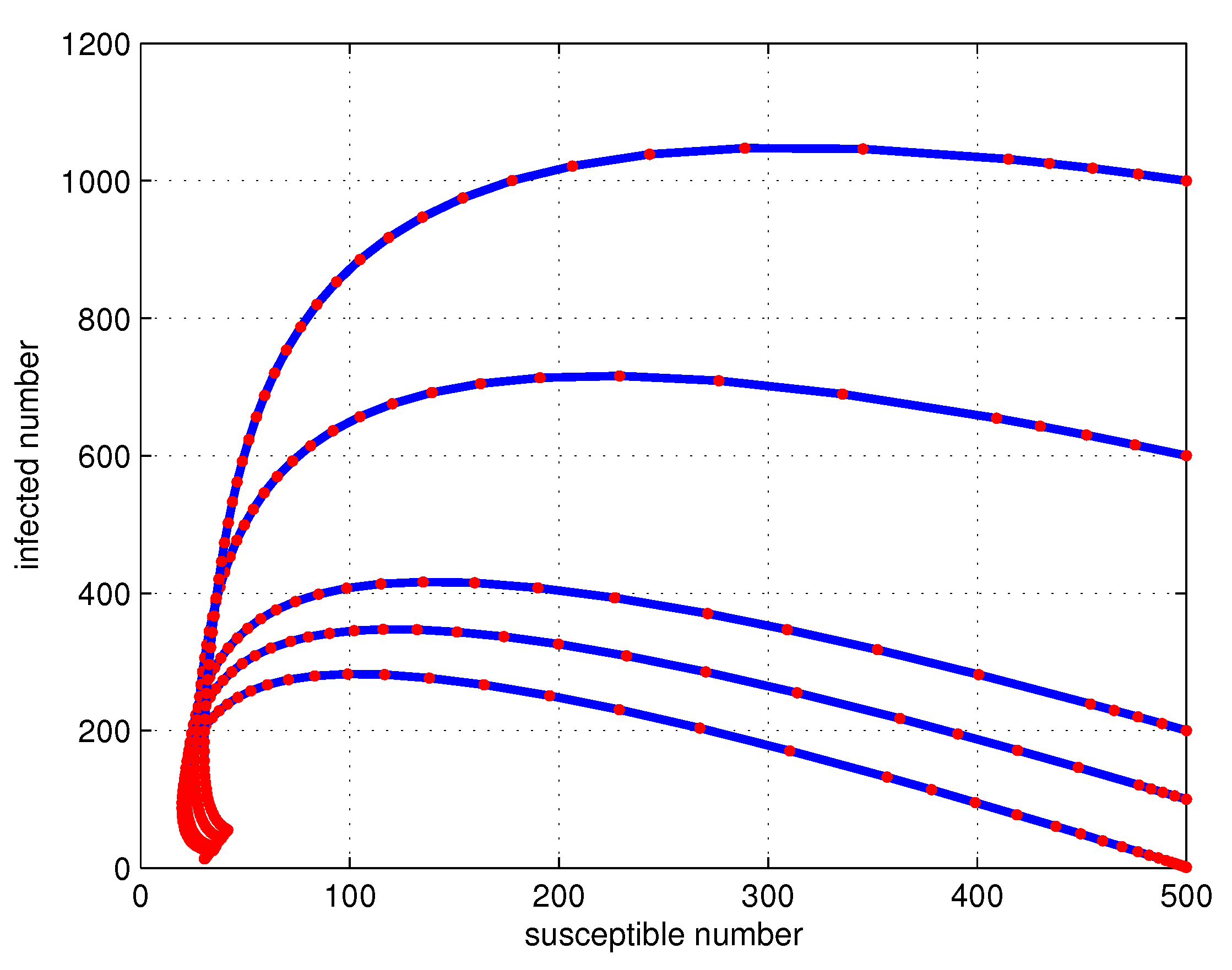
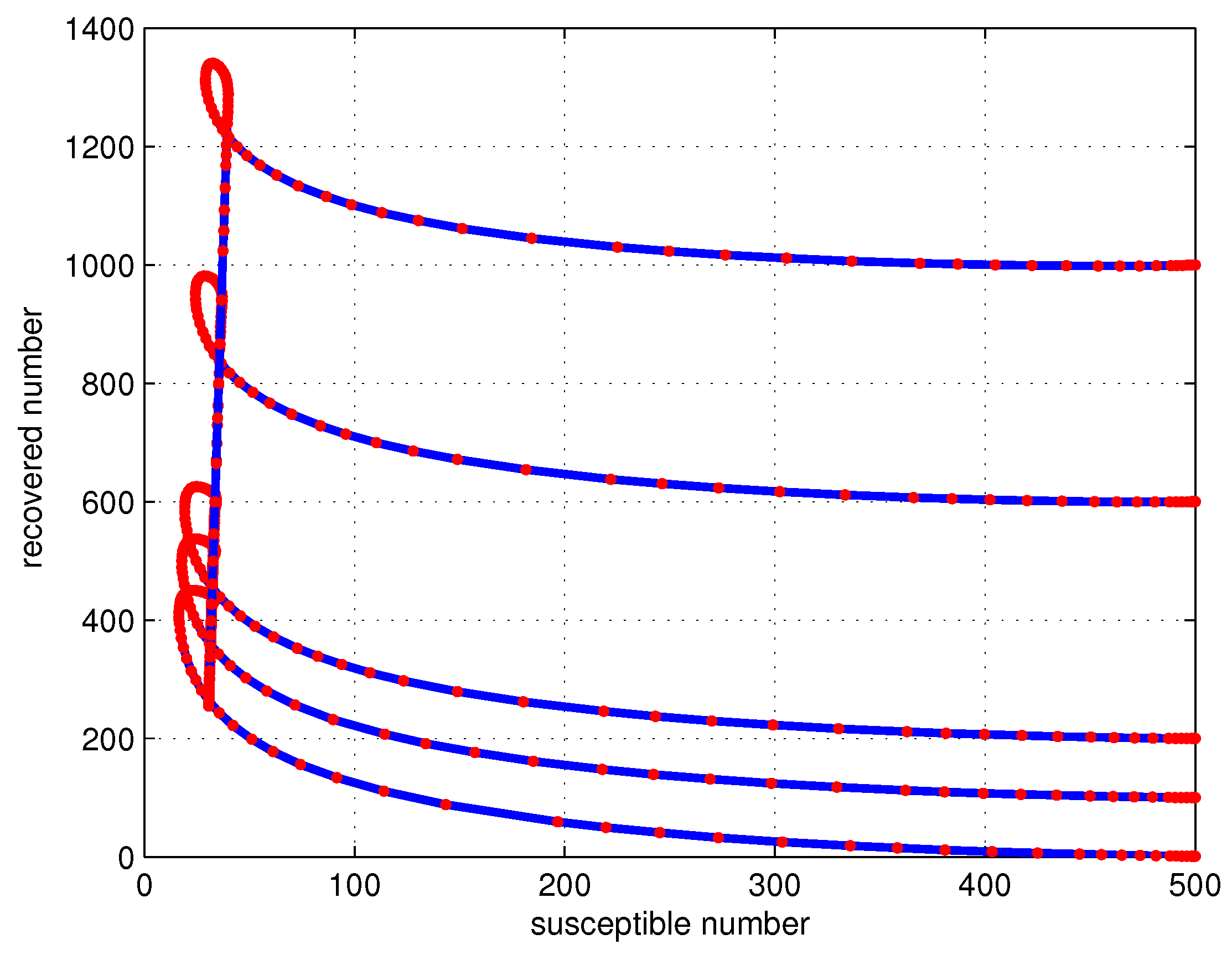
4. Numerical Simulations and Discussion
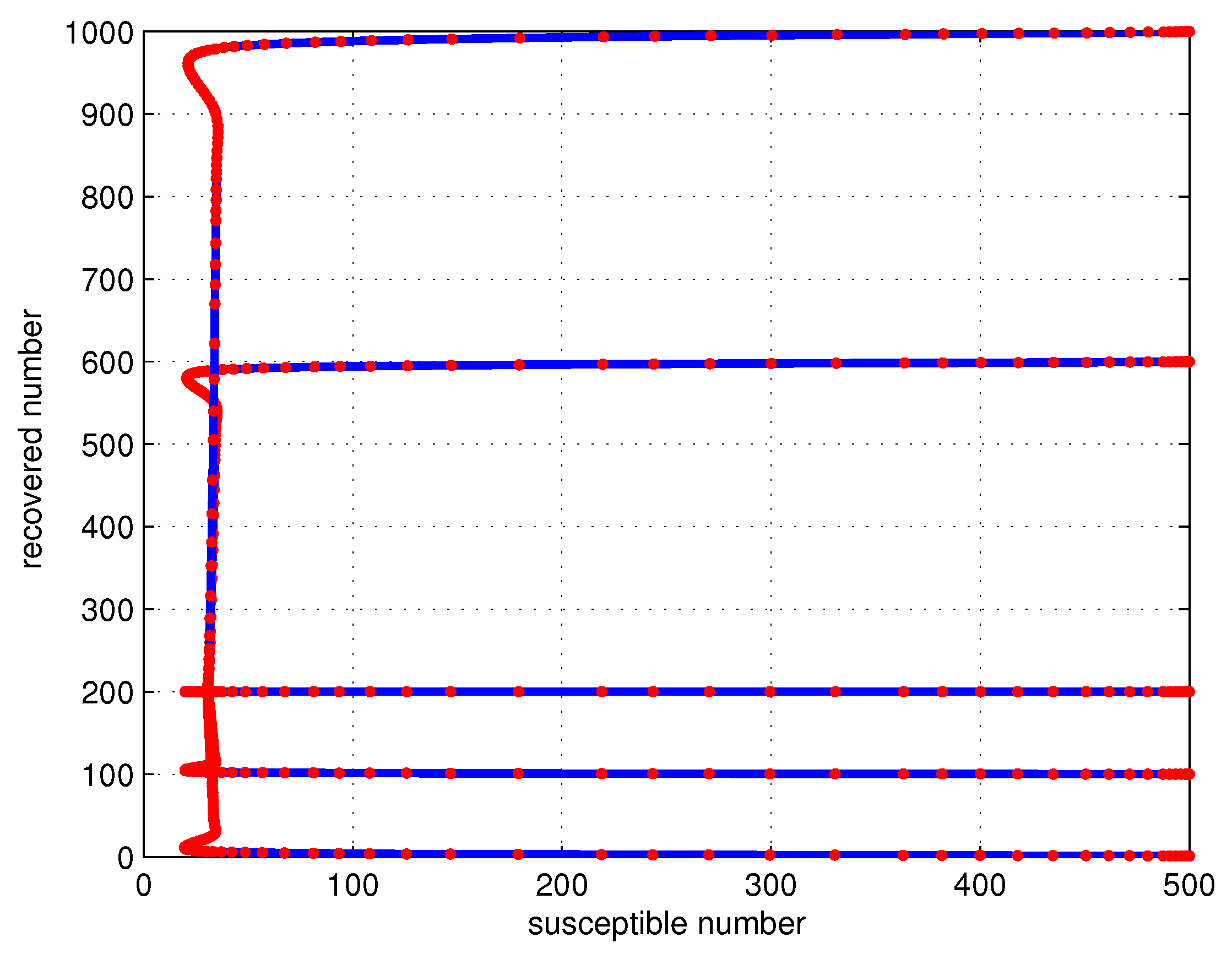
4.1. Simulations
4.2. Discussion
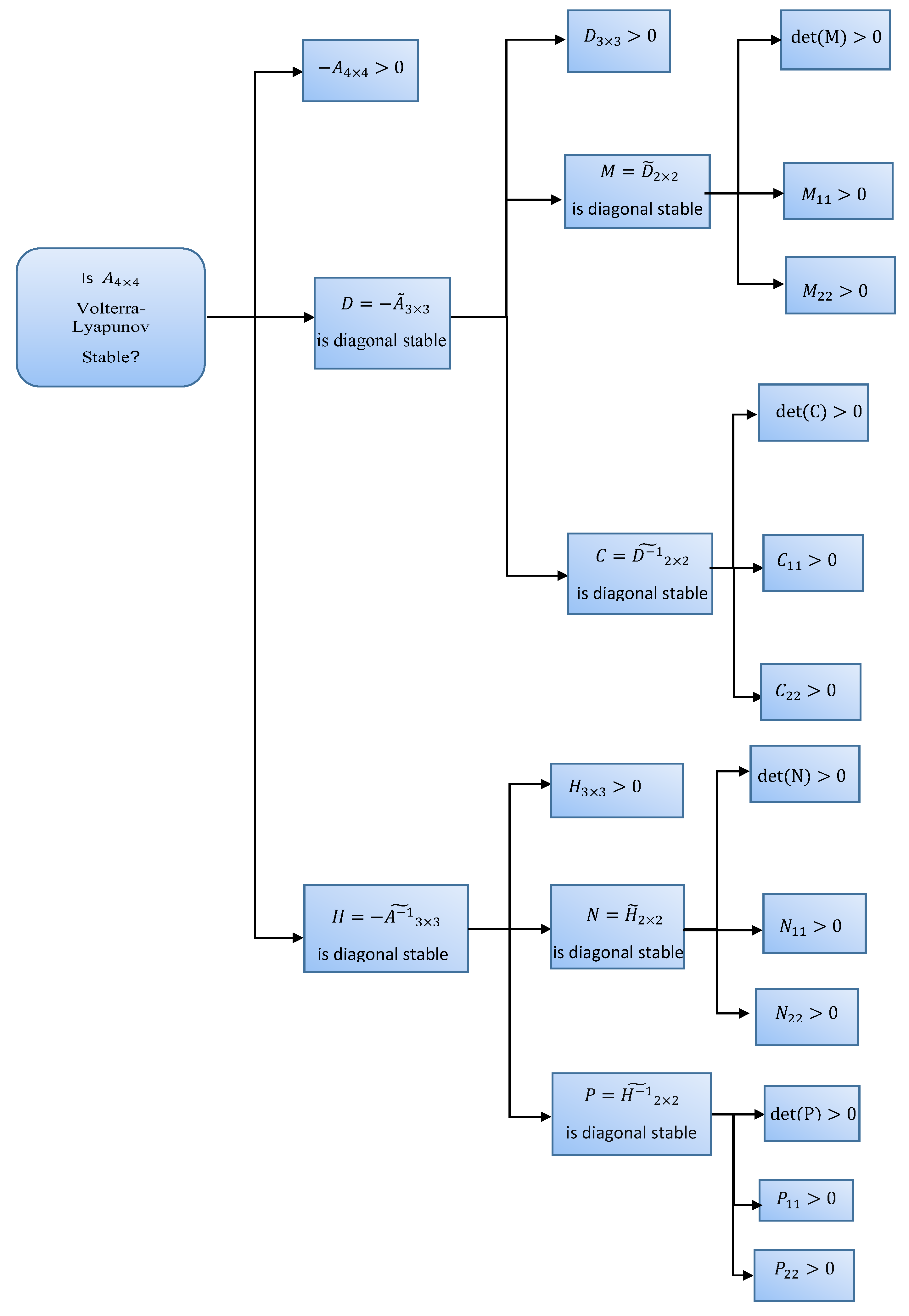
- Showing that E is stable, based on (L1).
- To prove that D is Volterra–Lyapunov stable, they performed another process. Definedwhere, is positive. Finally, by some algebraic and matrix manipulations, showed thatTo compare the results in this paper with the original method, the process of proving the stability of matrix is shown in Figure 7. According to our investigations on different systems, and as the authors mentioned in Section 6 [27], the implementation of the method for the higher dimensions systems (in the second step proposed by the authors) is very difficult and complex. Therefore, the use of the modified method, can reduce the complexity of the calculations.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
References
- Anderson, R.M.; May, R.M. Infectious Diseases of Humans: Dynamics and Control; Oxford University Press: Oxford, UK, 1991. [Google Scholar]
- Hethcote, H.W. The mathematics of infectious diseases. SIAM Rev. 2000, 42, 599–653. [Google Scholar] [CrossRef]
- Korobeinikov, A. Global properties of basic virus dynamics models. Bull. Math. Biol. 2004, 66, 879–883. [Google Scholar] [CrossRef] [PubMed]
- Abouelkheir, I.; Kihal, F.E.; Rachik, M.; Elmouki, I. Time needed to control an epidemic with restricted resources in SIR model with short-term controlled population: A fixed point method for a free isoperimetric optimal control problem. Math. Comput. Appl. 2018, 23, 64. [Google Scholar] [CrossRef]
- Hethcote, H.W.; Van Den Driessche, P. Some epidemiological models with nonlinear incidence. J. Math. Biol. 1991, 29, 271–287. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Li, M.; Yuan, S. Analysis of Transmission and Control of Tuberculosis in Mainland China, 2005–2016, Based on the Age-Structure Mathematical Model. Int. J. Environ. Res. Public Health 2017, 14, 1192. [Google Scholar] [CrossRef]
- Agaba, G.O.; Kyrychko, Y.N.; Blyuss, K.B. Time-delayed SIS epidemic model with population awareness. Ecol. Complex. 2017, 31, 50–56. [Google Scholar] [CrossRef]
- Sen, M.D.; Ibeas, A.; Quesada, S.A.; Nistal, R. On a SIR model in a patchy environment under constant and feedback decentralized controls with asymmetric parameterizations. Symmetry 2019, 11, 430. [Google Scholar] [CrossRef]
- Bairagi, N.; Adak, D. Role of precautionary measures in HIV epidemics: A mathematical assessment. Int. J. Biomath. 2016, 9, 1650096. [Google Scholar] [CrossRef]
- Sayan, M.; Hıncal, E.; Sanlıdag, T.; Kaymakamzade, B.; Saad, F.T.; Baba, I.A. Dynamics of HIV/AIDS in Turkey from 1985 to 2016. Qual. Quant. 2018, 52, 711–723. [Google Scholar] [CrossRef]
- Liu, X.; Takeuchi, Y.; Iwami, S. SVIR epidemic models with vaccination strategies. J. Theor. Biol. 2008, 253, 1–11. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, J.B.; Li, H. Global dynamics of an SIQR model with vaccination and elimination hybrid strategies. Mathematics 2018, 6, 328. [Google Scholar] [CrossRef]
- Upadhyay, R.K.; Pal, A.K.; Kumari, S.; Roy, P. Dynamics of an SEIR epidemic model with nonlinear incidence and treatment rates. Nonlinear Dyn. 2019, 96, 2351–2368. [Google Scholar] [CrossRef]
- Mwasa, A.; Tchuenche, J.M. Mathematical analysis of a cholera model with public health interventions. BioSystems 2011, 105, 190–200. [Google Scholar] [CrossRef]
- Wang, L.; Xu, R. Global stability of an SEIR epidemic model with vaccination. Int. J. Biomath. 2016, 9, 1650082. [Google Scholar] [CrossRef]
- Bentaleb, D.; Amine, S. Lyapunov function and global stability for a two-strain SEIR model with bilinear and nonmonotone incidence. Int. J. Biomath. 2019, 12, 1950021. [Google Scholar] [CrossRef]
- Chen, X.; Cao, J.; Park, J.H.; Qiu, J. Stability analysis and estimation of domain of attraction for the endemic equilibrium of an SEIQ epidemic model. Nonlinear Dyn. 2017, 87, 975–985. [Google Scholar] [CrossRef]
- Baba, I.A.; Hincal, E. Global stability analysis of two-strain epidemic model with bilinear and non-monotone incidence rates. Eur. Phys. J. Plus 2017, 132, 208. [Google Scholar] [CrossRef]
- Geng, Y.; Xu, J. Stability preserving NSFD scheme for a multi-group SVIR epidemic model. Math. Methods Appl. Sci. 2017, 40, 4917–4927. [Google Scholar] [CrossRef]
- Zaman, G.; Kang, Y.H.; Jung, I.H. Stability analysis and optimal vaccination of an SIR epidemic model. BioSystems 2008, 93, 240–249. [Google Scholar] [CrossRef]
- Yi, L.; Liu, Y.; Yu, W. Combination of Improved OGY and Guiding Orbit Method for Chaos Control. J. Adv. Comput. Intell. Intell. Inf. 2019, 23, 847–855. [Google Scholar] [CrossRef]
- Wang, X.; Liu, X.; Xie, W.C.; Xu, W.; Xu, Y. Global stability and persistence of HIV models with switching parameters and pulse control. Math. Comput. Simul. 2016, 123, 53–67. [Google Scholar] [CrossRef]
- Hu, Z.; Ma, W.; Ruan, S. Analysis of SIR epidemic models with nonlinear incidence rate and treatment. Math. Biosci. 2012, 238, 12–20. [Google Scholar] [CrossRef]
- Misra, A.K.; Sharma, A.; Shukla, J.B. Stability analysis and optimal control of an epidemic model with awareness programs by media. BioSystems 2015, 138, 53–62. [Google Scholar] [CrossRef] [PubMed]
- Thieme, H.R. Global stability of the endemic equilibrium in infinite dimension: Lyapunov functions and positive operators. J. Differ. Equ. 2011, 250, 3772–3801. [Google Scholar] [CrossRef]
- Kar, T.K.; Jana, S. A theoretical study on mathematical modelling of an infectious disease with application of optimal control. BioSystems 2013, 111, 37–50. [Google Scholar] [CrossRef] [PubMed]
- Liao, S.; Wang, J. Global stability analysis of epidemiological models based on Volterra-Lyapunov stable matrices. Chaos Solitons Fractals 2012, 45, 966–977. [Google Scholar] [CrossRef]
- Parsaei, M.R.; Javidan, R.; Shayegh Kargar, N.; Saberi Nik, H. On the global stability of an epidemic model of computer viruses. Theory Biosci. 2017, 136, 169–178. [Google Scholar] [CrossRef]
- Zahedi, M.S.; Kargar, N.S. The Volterra-Lyapunov matrix theory for global stability analysis of a model of the HIV/AIDS. Int. J. Biomath. 2016, 10, 1750002. [Google Scholar] [CrossRef]
- Tian, J.P.; Wang, J. Global stability for cholera epidemic models. Math. Biosci. 2011, 232, 31–41. [Google Scholar] [CrossRef]
- Driessche, V.D.; Watmough, J. Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 2002, 180, 29–48. [Google Scholar] [CrossRef]
- Cross, G.W. Three types of matrix stability. Linear Algebra Appl. 1978, 20, 253–263. [Google Scholar] [CrossRef]
- Rinaldi, F. Global stability results for epidemic models with latent period. IMA J. Math. Appl. Med. Biol. 1990, 7, 69–75. [Google Scholar] [CrossRef]
- Redheffer, R. Volterra multipliers I. SIAM J. Algebr. Discret. Methods 1985, 6, 592–611. [Google Scholar] [CrossRef]
- Redheffer, R. Volterra multipliers II. SIAM J. Algebr. Discret. Methods 1985, 6, 612–623. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| a | The total recruitment |
| The constant vaccination control | |
| Transmission rates from vaccinated to susceptible | |
| The reciprocal of half-saturation | |
| The infection force parameter | |
| The saturated infection rate | |
| m | Infected population rate that have recovered naturally |
| The portion recovered () | |
| The constant treatment control | |
| b | The effectiveness of the treatment |
| The rate by which the infected populations recovered | |
| The part of the recovered class becomes susceptible | |
| Recovered sections that go to recovery class () | |
| Death rate of infected people due to disease attack | |
| d | The natural death rate |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masoumnezhad, M.; Rajabi, M.; Chapnevis, A.; Dorofeev, A.; Shateyi, S.; Kargar, N.S.; Nik, H.S. An Approach for the Global Stability of Mathematical Model of an Infectious Disease. Symmetry 2020, 12, 1778. https://doi.org/10.3390/sym12111778
Masoumnezhad M, Rajabi M, Chapnevis A, Dorofeev A, Shateyi S, Kargar NS, Nik HS. An Approach for the Global Stability of Mathematical Model of an Infectious Disease. Symmetry. 2020; 12(11):1778. https://doi.org/10.3390/sym12111778
Chicago/Turabian StyleMasoumnezhad, Mojtaba, Maziar Rajabi, Amirahmad Chapnevis, Aleksei Dorofeev, Stanford Shateyi, Narges Shayegh Kargar, and Hassan Saberi Nik. 2020. "An Approach for the Global Stability of Mathematical Model of an Infectious Disease" Symmetry 12, no. 11: 1778. https://doi.org/10.3390/sym12111778
APA StyleMasoumnezhad, M., Rajabi, M., Chapnevis, A., Dorofeev, A., Shateyi, S., Kargar, N. S., & Nik, H. S. (2020). An Approach for the Global Stability of Mathematical Model of an Infectious Disease. Symmetry, 12(11), 1778. https://doi.org/10.3390/sym12111778