Design and Control of a Wall Cleaning Robot with Adhesion-Awareness



Abstract
1. Introduction
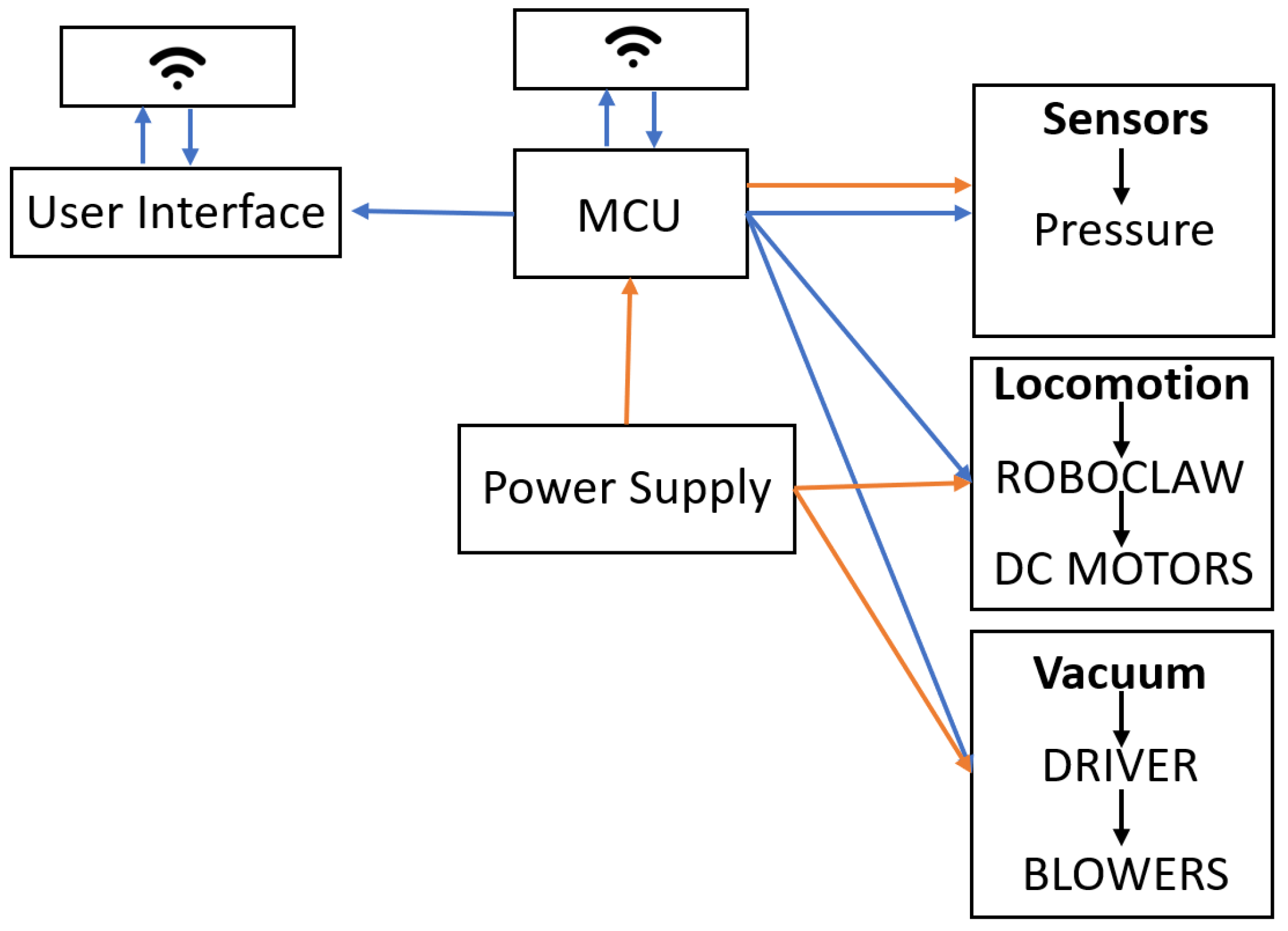
2. Design of Wall-C
3. Improving Safety and Reliability Based on Adhesion-Awareness
3.1. Rationale behind Controlling Adhesion
3.2. An Adhesion-Awareness Based Control Strategy to Improve Safety and Reliability
4. Results and Discussion
4.1. Experimental Setup
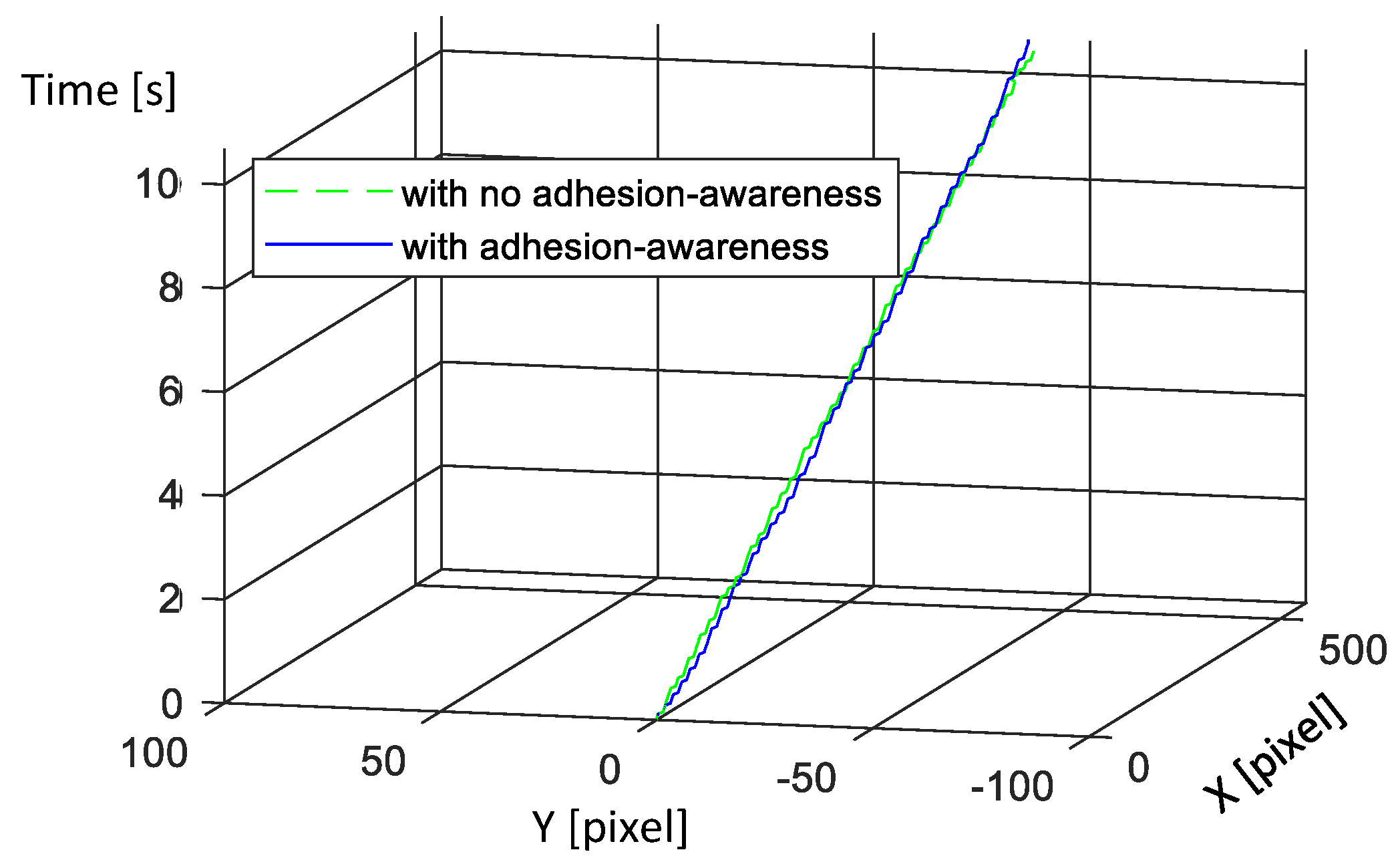
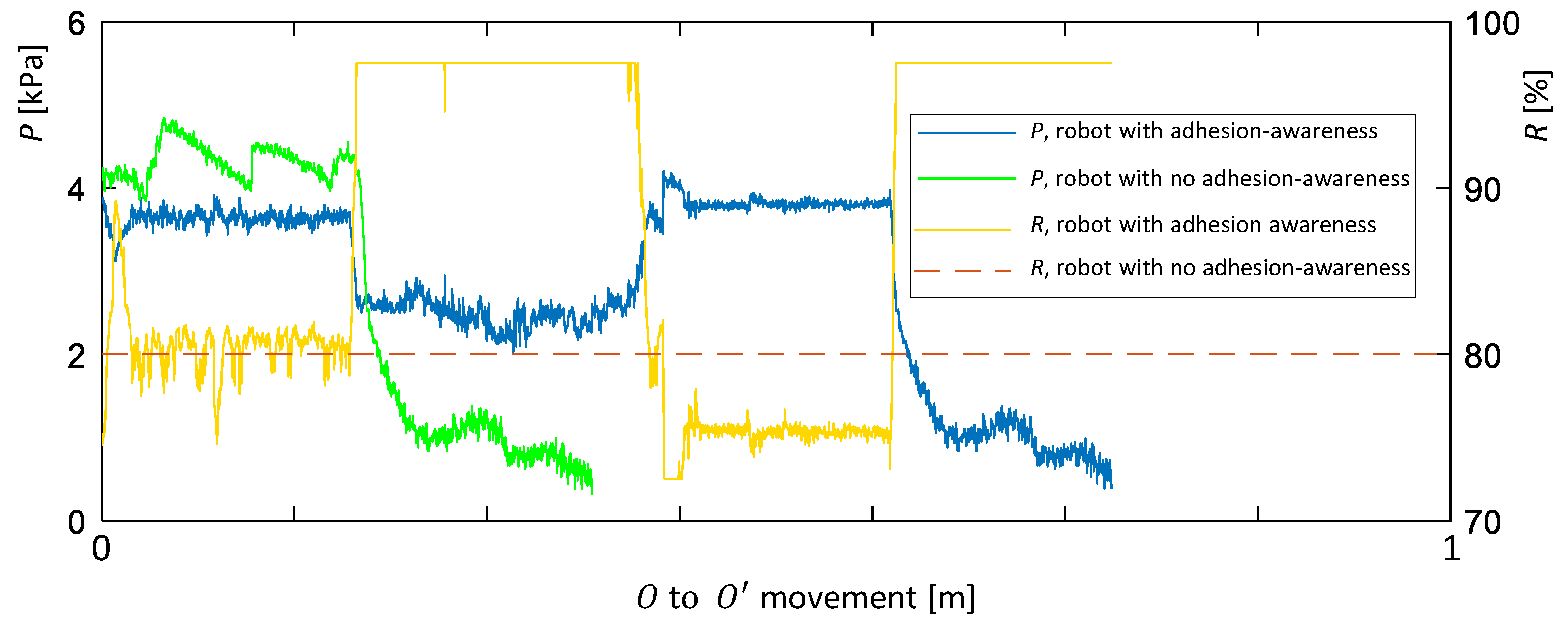
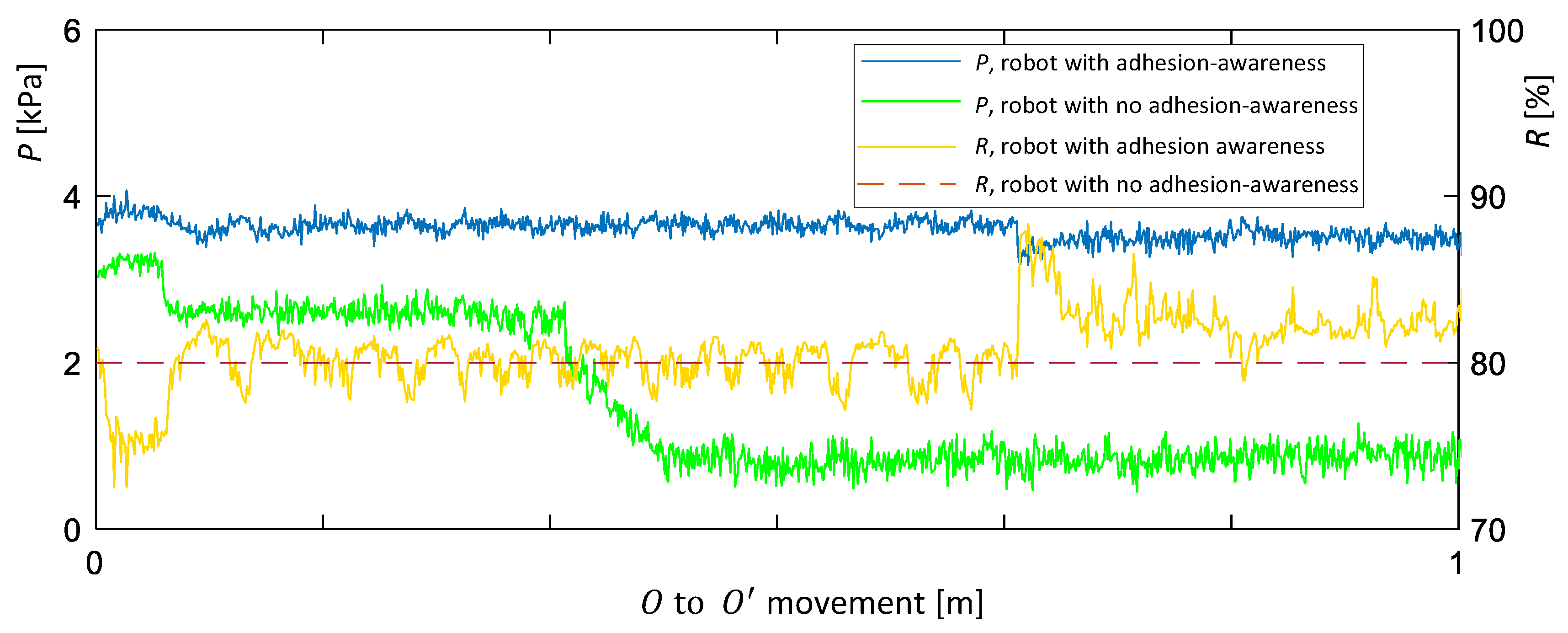
4.2. Experiment and Results
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Aboulnaga, M.M. High-Rise Buildings in Context of Sustainability; Urban Metaphors of Greater Cairo, Egypt: A Case Study on Sustainability and Strategic Environmental Assessment. In Sustainable High Rise Buildings in Urban Zones; Springer: Cham, Switzerland, 2017; pp. 163–217. [Google Scholar]
- Ahlfeldt, G.M.; McMillen, D.P. Tall buildings and land values: Height and construction cost elasticities in Chicago, 1870–2010. Rev. Econ. Stat. 2018, 100, 861–875. [Google Scholar] [CrossRef]
- Wordsworth, P.; Lee, R. Lee’s Building Maintenance Management; Blackwell Science: London, UK, 2001. [Google Scholar]
- Tun, T.T.; Huang, L.; Mohan, R.E.; Matthew, S.G.H. Four-wheel steering and driving mechanism for a reconfigurable floor cleaning robot. Autom. Constr. 2019, 106, 102796. [Google Scholar] [CrossRef]
- Bai, J.; Lian, S.; Liu, Z.; Wang, K.; Liu, D. Deep learning based robot for automatically picking up garbage on the grass. IEEE Trans. Consum. Electron. 2018, 64, 382–389. [Google Scholar] [CrossRef]
- Abramson, S.; Levin, A.; Levin, S.; Gur, D. Window Cleaning Robot. US Patent 10,383,492, 20 August 2019. [Google Scholar]
- Ilyas, M.; Yuyao, S.; Mohan, R.E.; Devarassu, M.; Kalimuthu, M. Design of sTetro: A modular, reconfigurable, and autonomous staircase cleaning robot. J. Sens. 2018, 2018, 8190802. [Google Scholar] [CrossRef]
- Kim, J.; Mishra, A.K.; Limosani, R.; Scafuro, M.; Cauli, N.; Santos-Victor, J.; Mazzolai, B.; Cavallo, F. Control strategies for cleaning robots in domestic applications: A comprehensive review. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Hon, C.K.; Chan, A.P. Safety management in repair, maintenance, minor alteration, and addition works: Knowledge management perspective. J. Manag. Eng. 2013, 30, 04014026. [Google Scholar] [CrossRef]
- Cardini, E.; Sohn, E.C. Above and Beyond: Access Techniques for the Assessment of Buildings and Structures. In AEI 2013: Building Solutions for Architectural Engineering; American Society of Civil Engineers: Reston, VA, USA, 2013; pp. 306–320. [Google Scholar]
- Schmidt, D.; Berns, K. Climbing robots for maintenance and inspections of vertical structures—A survey of design aspects and technologies. Robot. Auton. Syst. 2013, 61, 1288–1305. [Google Scholar] [CrossRef]
- Nansai, S.; Elara, M.; Tun, T.; Veerajagadheswar, P.; Pathmakumar, T. A novel nested reconfigurable approach for a glass façade cleaning robot. Inventions 2017, 2, 18. [Google Scholar] [CrossRef]
- Sun, G.; Li, X.; Li, P.; Yue, L.; Yu, Z.; Zhou, Y.; Liu, Y.H. Adaptive Vision-Based Control for Rope-Climbing Robot Manipulator. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1454–1459. [Google Scholar]
- Seo, K.; Cho, S.; Kim, T.; Kim, H.S.; Kim, J. Design and stability analysis of a novel wall-climbing robotic platform (ROPE RIDE). Mech. Mach. Theory 2013, 70, 189–208. [Google Scholar] [CrossRef]
- Jiang, J.-G.; Zhang, Y.; Shu, Z. Implementation of glass-curtain-wall cleaning robot driven by double flexible rope. Ind. Robot Int. J. 2014, 41, 429–438. [Google Scholar] [CrossRef]
- Moon, S.M.; Hong, D.; Kim, S.W.; Park, S. Building wall maintenance robot based on built-in guide rail. In Proceedings of the 2012 IEEE International Conference on Industrial Technology, Athens, Greece, 19–21 March 2012; pp. 498–503. [Google Scholar]
- Lee, Y.S.; Kim, S.H.; Gil, M.S.; Lee, S.H.; Kang, M.S.; Jang, S.H.; Yu, B.H.; Ryu, B.G.; Hong, D.; Han, C.S. The study on the integrated control system for curtain wall building façade cleaning robot. Autom. Constr. 2018, 94, 39–46. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Zong, G.; Wang, W.; Liu, R. Sky cleaner 3: A real pneumatic climbing robot for glass-wall cleaning. IEEE Robot. Autom. Mag. 2006, 13, 32–41. [Google Scholar] [CrossRef]
- Tun, T.T.; Elara, M.R.; Kalimuthu, M.; Vengadesh, A. Glass facade cleaning robot with passive suction cups and self-locking trapezoidal lead screw drive. Autom. Constr. 2018, 96, 180–188. [Google Scholar] [CrossRef]
- Wang, W.; Wang, K.; Zong, G.H.; Li, D.Z. Principle and experiment of vibrating suction method for wall-climbing robot. Vacuum 2010, 85, 107–112. [Google Scholar] [CrossRef]
- Nansai, S.; Mohan, R.E. A survey of wall climbing robots: Recent advances and challenges. Robotics 2016, 5, 14. [Google Scholar] [CrossRef]
- Anand, T.; Kushwaha, S.K.; Roslin, S.E.; Nandhitha, N. Flux controlled BLDC motor for automated glass cleaning robot. In Proceedings of the 2017 Third International Conference on Science Technology Engineering & Management (ICONSTEM), Chennai, India, 23–24 March 2017; pp. 955–959. [Google Scholar]
- Wu, G.; Zhang, H.; Zhang, B.; Zhang, L. Research on Design of Glass Wall Cleaning Robot. In Proceedings of the 2018 5th International Conference on Information Science and Control Engineering (ICISCE), Zhengzhou, China, 20–22 July 2018; pp. 932–935. [Google Scholar]
- Lee, G.; Kim, H.; Seo, K.; Kim, J.; Kim, H.S. MultiTrack: A multi-linked track robot with suction adhesion for climbing and transition. Robot. Auton. Syst. 2015, 72, 207–216. [Google Scholar] [CrossRef]
- Vega-Heredia, M.; Mohan, R.E.; Wen, T.Y.; Siti’Aisyah, J.; Vengadesh, A.; Ghanta, S.; Vinu, S. Design and modelling of a modular window cleaning robot. Autom. Constr. 2019, 103, 268–278. [Google Scholar] [CrossRef]
- Miyake, T.; Ishihara, H.; Yoshimura, M. Basic studies on wet adhesion system for wall climbing robots. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 1920–1925. [Google Scholar]
- Brusell, A.; Andrikopoulos, G.; Nikolakopoulos, G. Novel considerations on the negative pressure adhesion of electric ducted fans: An experimental study. In Proceedings of the 2017 25th Mediterranean Conference on Control and Automation (MED), Valletta, Malta, 3–6 July 2017; pp. 1404–1409. [Google Scholar]
- Xu, D.; Gao, X.; Wu, X.; Fan, N.; Li, K.; Kikuchi, K. Suction ability analyses of a novel wall climbing robot. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; pp. 1506–1511. [Google Scholar]
- Li, J.; Gao, X.; Fan, N.; Li, K.; Jiang, Z. BIT Climber: A centrifugal impeller-based wall climbing robot. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 4605–4609. [Google Scholar]
- Andrikopoulos, G.; Papadimitriou, A.; Brusell, A.; Nikolakopoulos, G. On Model-Based Adhesion Control of a Vortex Climbing Robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1460–1465. [Google Scholar]
- Muthugala, M.A.V.J.; Vega-Herdia, M.; Ayyalusami, V.; Sriharsha, G.; Elara, M.R. Design of an Adhesion-Aware Facade Cleaning Robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 1441–1447. [Google Scholar]
- Zadeh, L.A. Is there a need for fuzzy logic? Inf. Sci. 2008, 178, 2751–2779. [Google Scholar] [CrossRef]
- De Silva, C.W. Intelligent Control: Fuzzy Logic Applications; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Ross, T.J. Fuzzy Logic with Engineering Applications; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Lee, C.C. Fuzzy logic in control systems: Fuzzy logic controller. II. IEEE Trans. Syst. Man Cybern. 1990, 20, 419–435. [Google Scholar] [CrossRef]
- Chen, C.; Modares, H.; Xie, K.; Lewis, F.L.; Wan, Y.; Xie, S. Reinforcement learning-based adaptive optimal exponential tracking control of linear systems with unknown dynamics. IEEE Trans. Autom. Control 2019, 64, 4423–4438. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | Rule |
|---|---|
| 1 | If (P is L) and (C is L) then (R is M) |
| 2 | If (P is L) and (C is M) then (R is H) |
| 3 | If (P is L) and (C is H) then (R is VH) |
| 4 | If (P is M) and (C is L) then (R is L) |
| 5 | If (P is M) and (C is M) then (R is M) |
| 6 | If (P is M) and (C is H) then (R is H) |
| 7 | If (P is H) and (C is L) then (R is VL) |
| 8 | If (P is H) and (C is M) then (R is L) |
| 9 | If (P is H) and (C is H) then (R is M) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muthugala, M.A.V.J.; Vega-Heredia, M.; Mohan, R.E.; Vishaal, S.R. Design and Control of a Wall Cleaning Robot with Adhesion-Awareness. Symmetry 2020, 12, 122. https://doi.org/10.3390/sym12010122
Muthugala MAVJ, Vega-Heredia M, Mohan RE, Vishaal SR. Design and Control of a Wall Cleaning Robot with Adhesion-Awareness. Symmetry. 2020; 12(1):122. https://doi.org/10.3390/sym12010122
Chicago/Turabian StyleMuthugala, M. A. Viraj J., Manuel Vega-Heredia, Rajesh Elara Mohan, and Suresh Raj Vishaal. 2020. "Design and Control of a Wall Cleaning Robot with Adhesion-Awareness" Symmetry 12, no. 1: 122. https://doi.org/10.3390/sym12010122
APA StyleMuthugala, M. A. V. J., Vega-Heredia, M., Mohan, R. E., & Vishaal, S. R. (2020). Design and Control of a Wall Cleaning Robot with Adhesion-Awareness. Symmetry, 12(1), 122. https://doi.org/10.3390/sym12010122