Computational Fluid Dynamics Study of Water Entry Impact Forces of an Airborne-Launched, Axisymmetric, Disk-Type Autonomous Underwater Hovering Vehicle


Abstract
:
1. Introduction
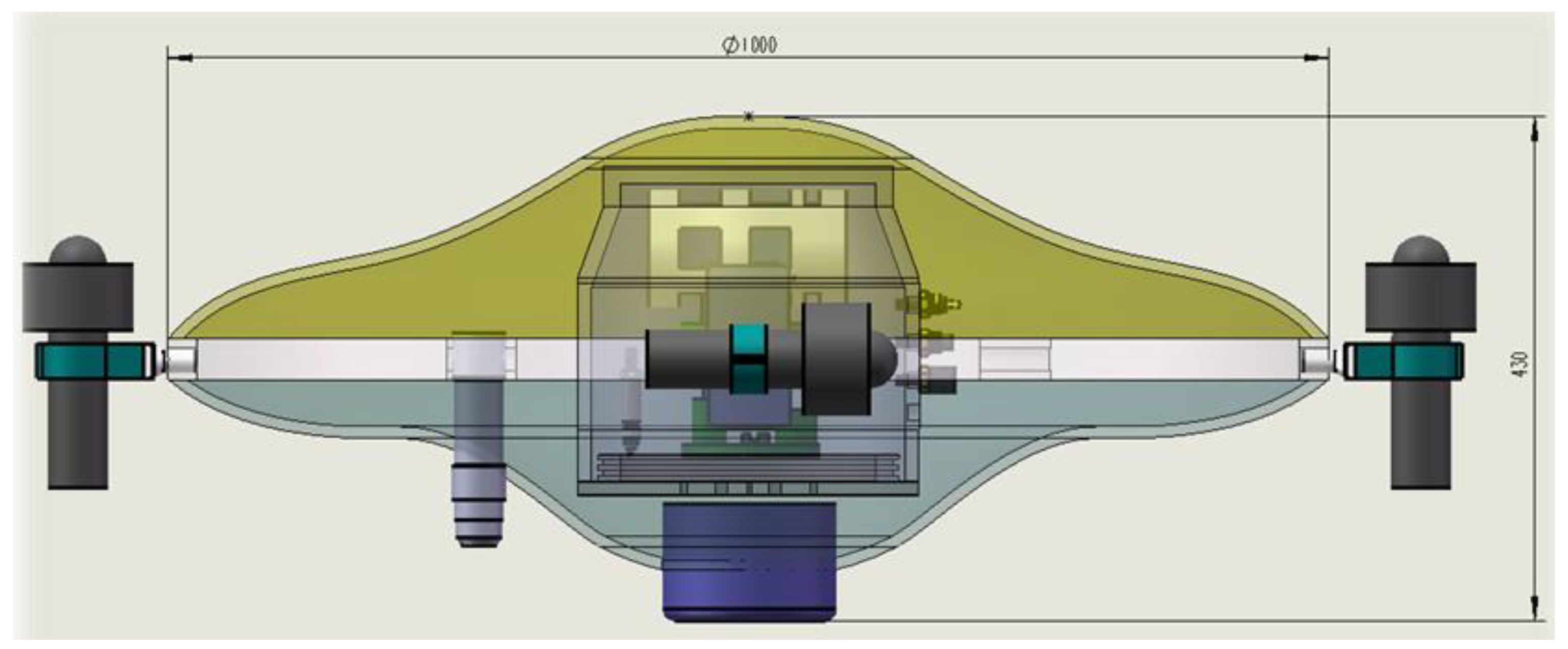
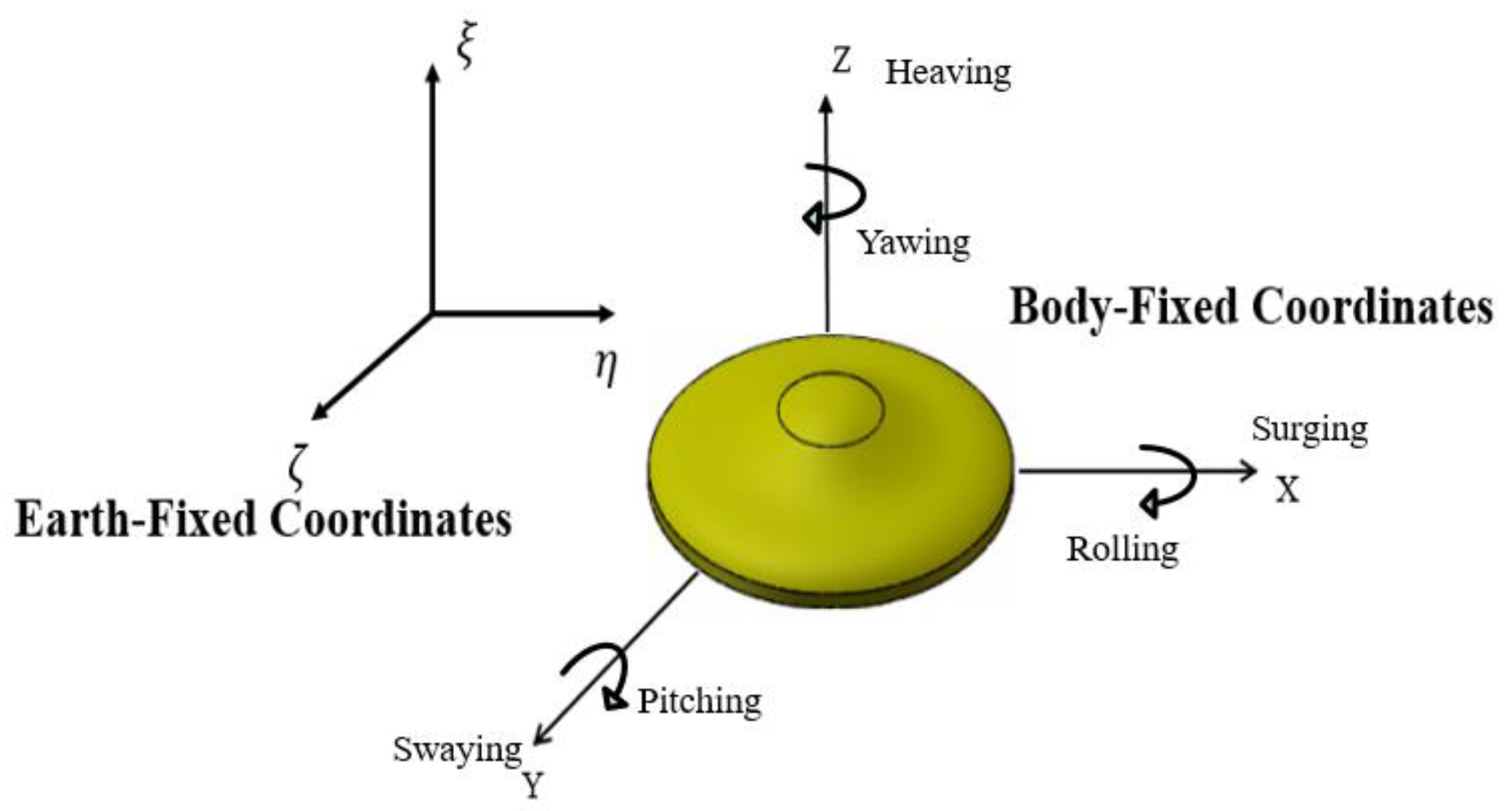
2. Configuration of the AUH
3. Numerical Simulation of the Impact on Water Entry
3.1. N-S Governing Equations and Turbulence Models
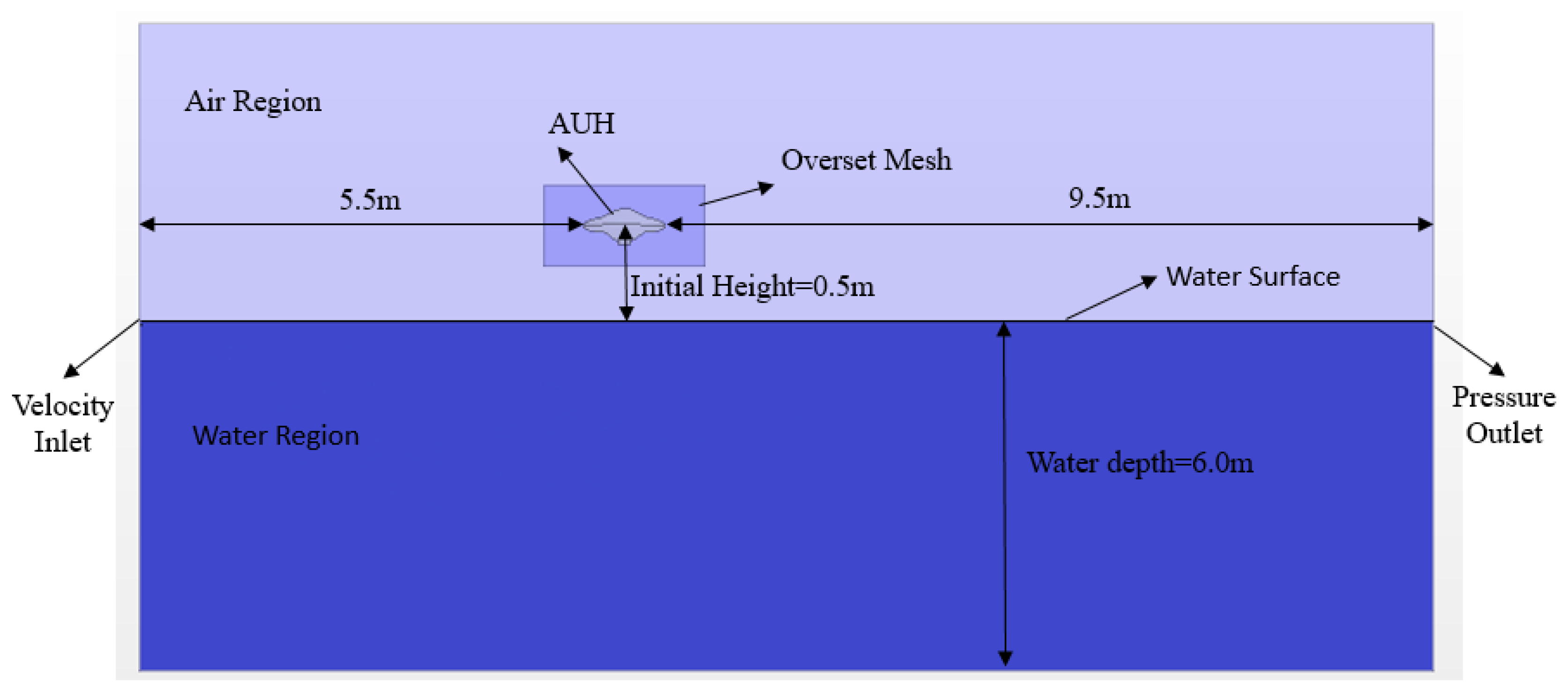
3.2. Boundary Conditions
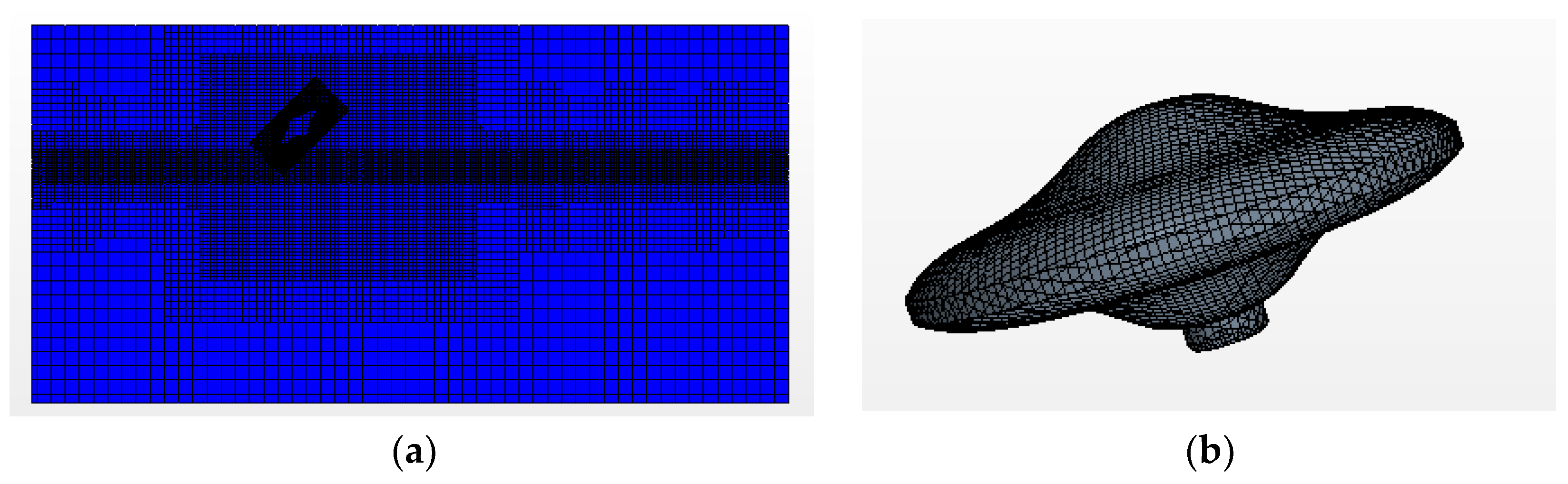
3.3. Meshing the Computational Domain
4. Simulation Results
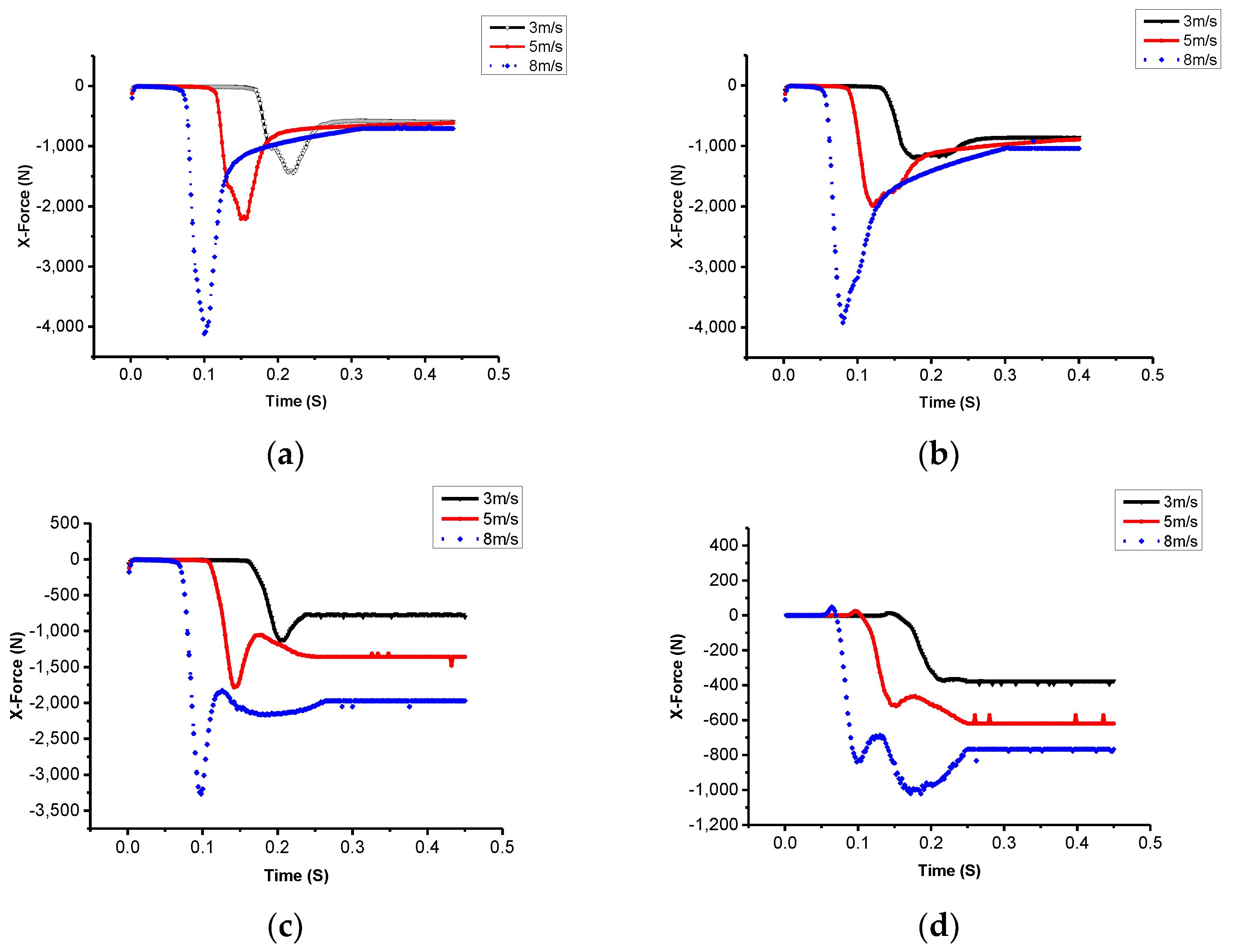
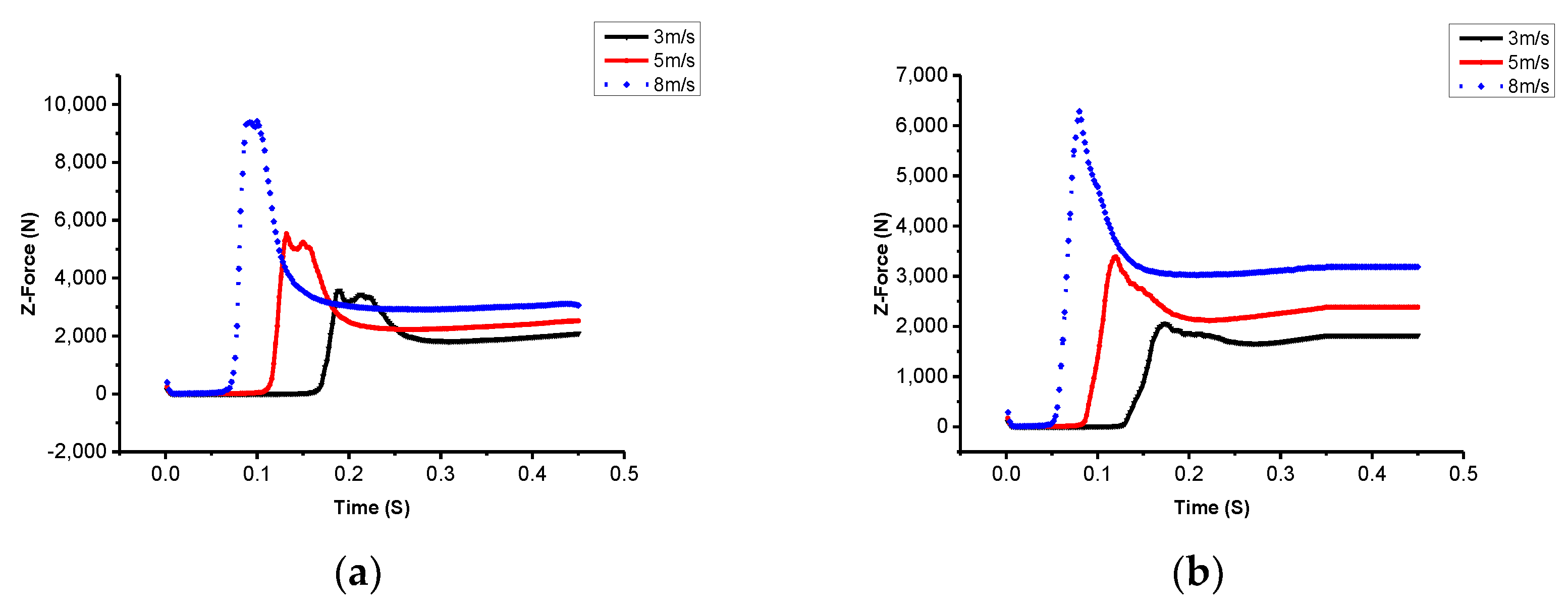
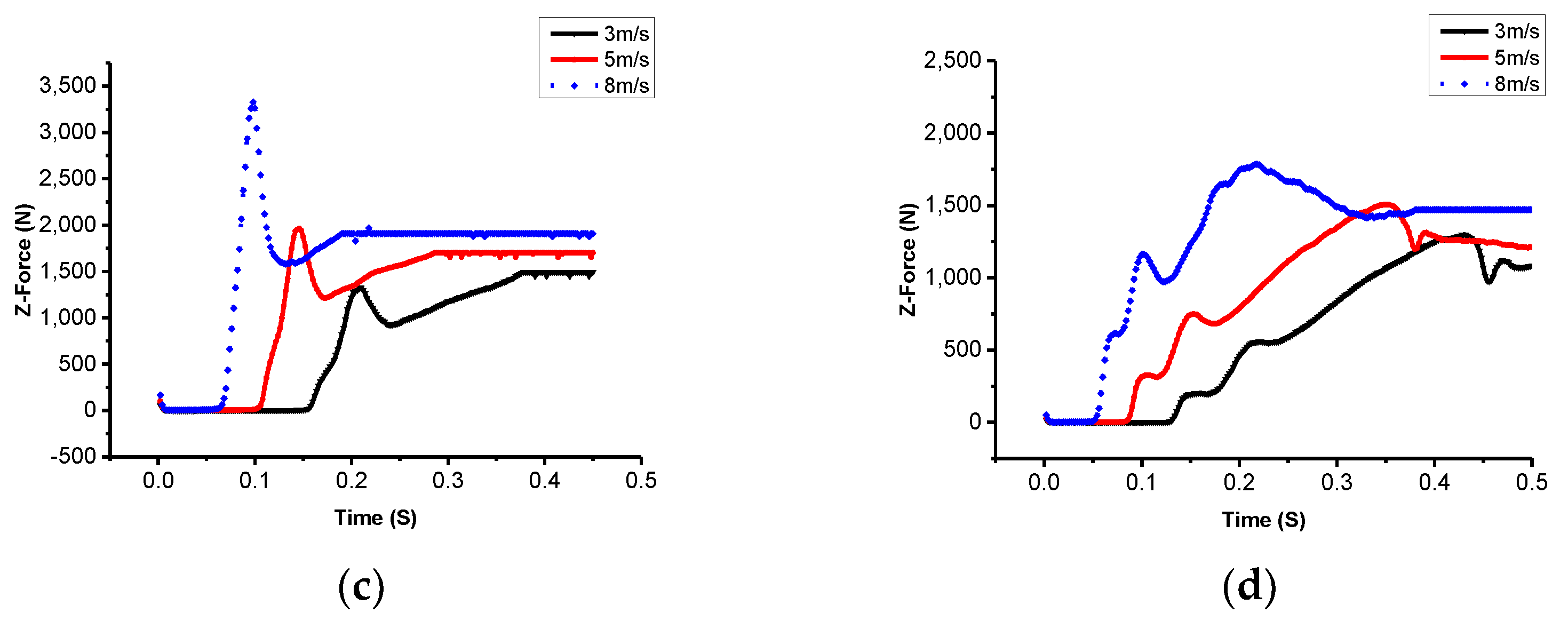
4.1. Impact Force Load of the Water Entry Process
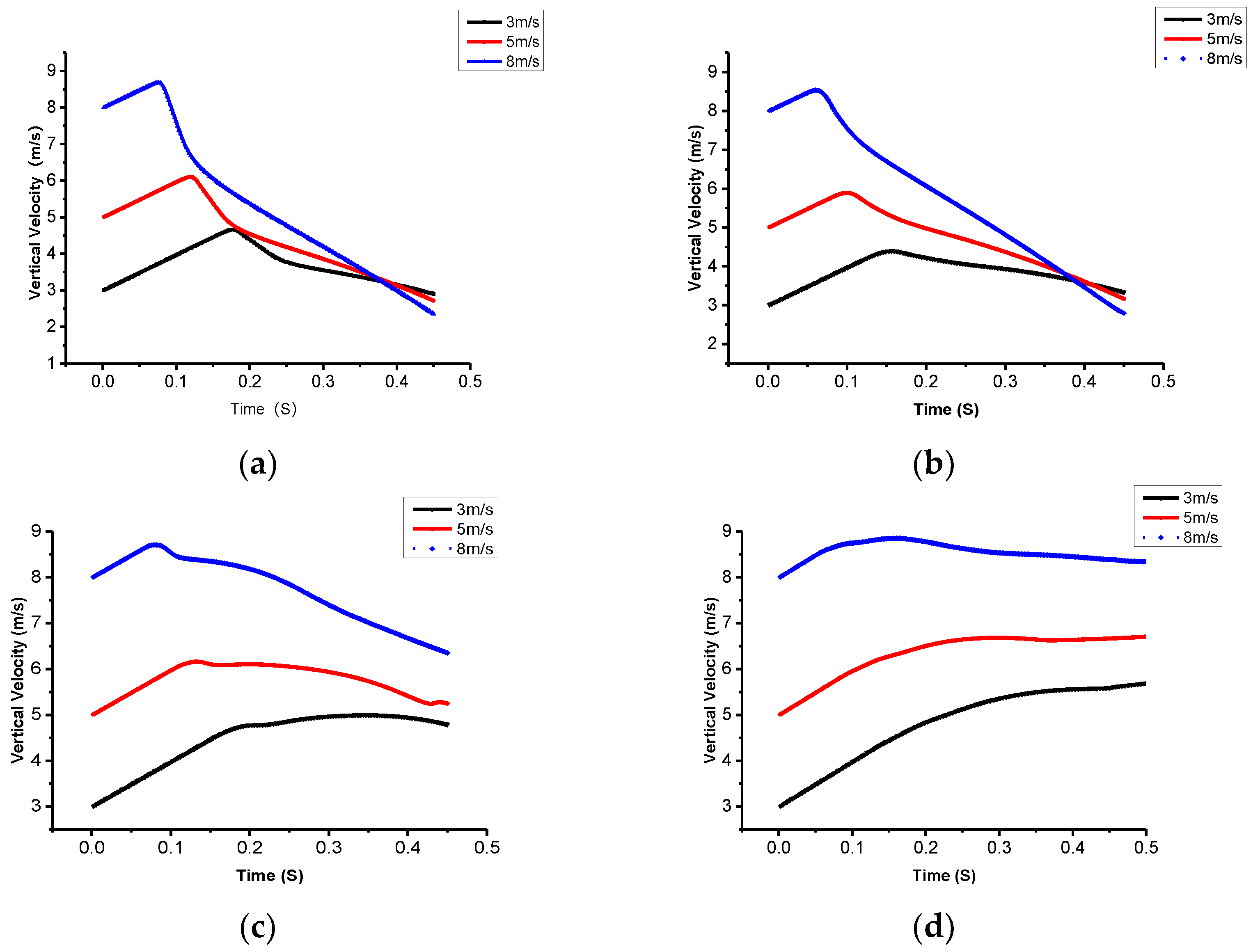
4.2. Variations of the AUH Water Entry Velocity
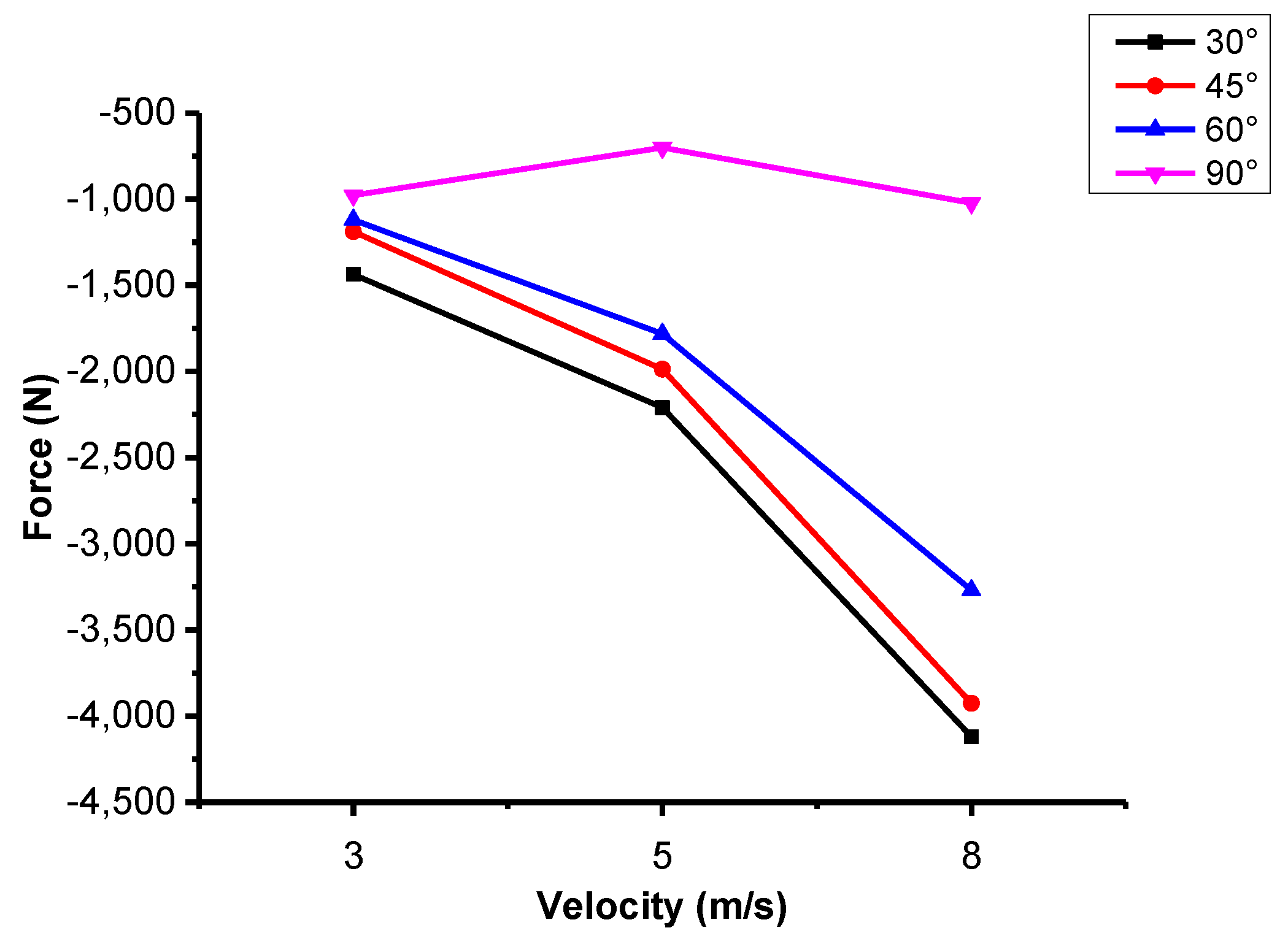
4.3. Maximum Load Analysis
5. Conclusions
- (1)
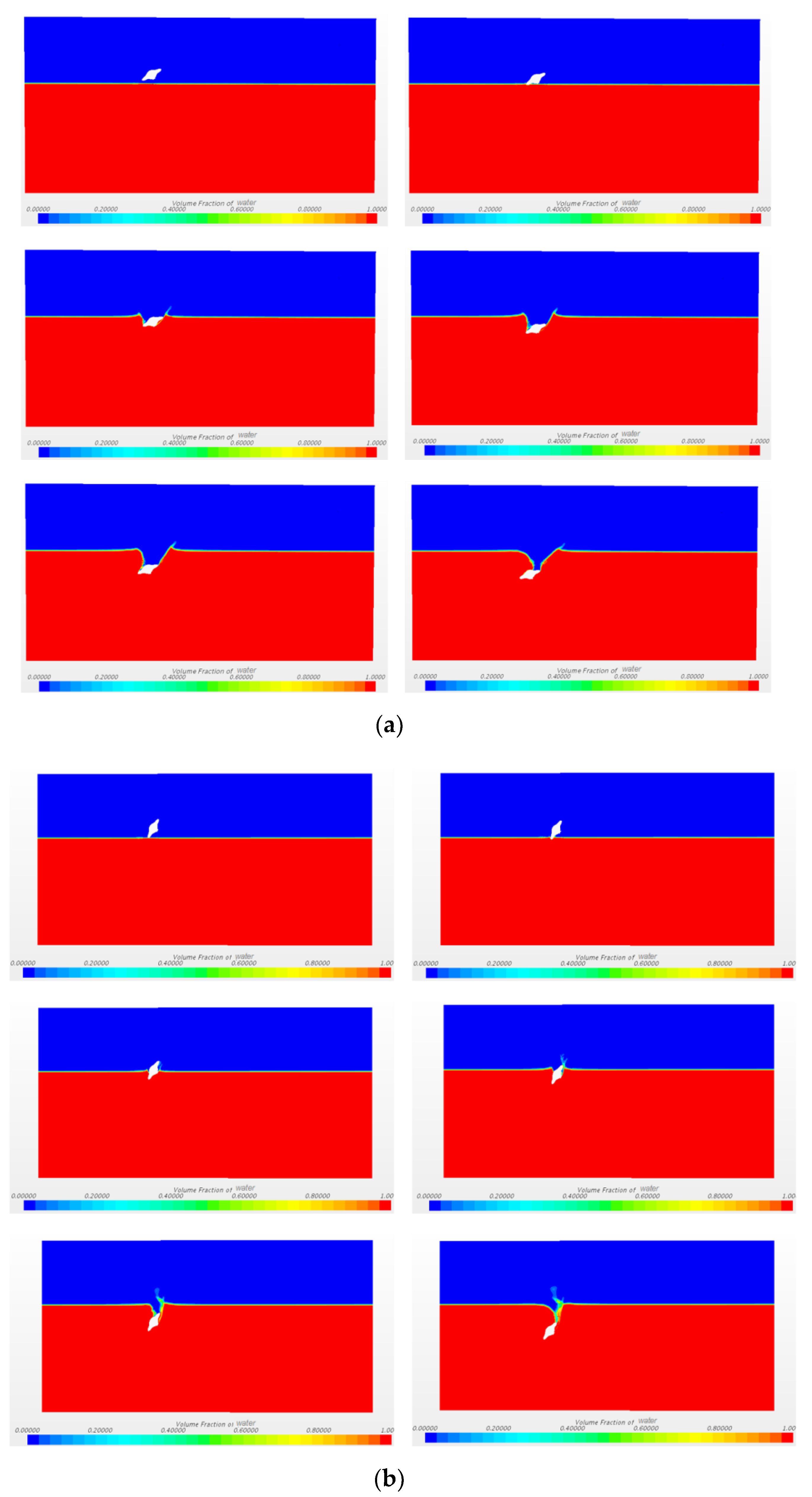
- The total process of the AUH, with a traditional single-arm suspension or air-launched into the water, is accompanied by some significant phenomena such as surface uplift, splashing, asymmetrical cavity formation, and so on. The numerical stress analysis and maximum peak impact loads of the vertical axisymmetric hull body is emphasized in this paper. The variations of surge and heave loads versus initial velocities of 3, 5, and 8 m/s at different immersion angles of 30°, 45°, 60°, and 90° over time was studied.
- (2)
- While the AUH with an improved single-arm suspension was immersed into the water, a peak impact load occurred. As the water depth increased, the impact decreased until a stable value was reached. The impact load of the AUH decreased with an increasing water entry angle, and the greater the initial falling velocity of the AUH was, the greater was the load that was experienced. In these simulations, the maximum peak impact loads on the AUH in surge and heave appeared at the initial velocity 8 m/s and immersion angle 30°, approaching 4000 N and N, respectively. These quantities shall be used as a reference for the structural strength design of the AUHs.
- (3)
- While the immersion angle of the air-launched AUH with a single-arm suspension immersed into the water decreased, the surge peak load increased. Thus, the dish-shaped AUH hull form should not have a small immersion angle into the water. Nevertheless, the silent phenomenon of acoustic transducers may appear when the water entry angle is 90°. In the trade-off study, these results suggest that the appropriate water entry immersion angle for the AUH should be 45°. The desired immersion angle will provide further design reference for air-launching transmitters of the AUHs.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yamazaki, T. Status of Development for Deep-sea Mineral Resources. J. Jpn. Inst. Energy 2009, 88, 569–576. [Google Scholar]
- Leonard, J.J.; Bahr, A. Autonomous Underwater Vehicle Navigation. J. Ocean. Eng. Technol. 2010, 35, 663–678. [Google Scholar]
- Yi, R.; Hu, Z.; Lin, Y.; Gu, H.; Ji, D.; Liu, J.; Wang, C. Maneuverability design and analysis of an autonomous underwater vehicle for deep-sea hydrothermal plume survey. In 2013 OCEANS—San Diego; IEEE: San Diego, CA, USA, 2013; pp. 1–5. [Google Scholar]
- Fossen, T.I. Marine Control System, Guidance, Navigation and Control of Ships, Rigs and Underwater; Marine Cybernetics: Trondheim, Norway, 2002; p. 586. [Google Scholar]
- Phillips, A.B.; Turnock, S.R.; Furlong, M. The use of computational fluid dynamics to aid cost-effective hydrodynamic design of autonomous underwater vehicles. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2010, 224, 239–254. [Google Scholar] [CrossRef]
- Chen, C.-W.; Jiang, Y.; Huang, H.-C.; Ji, D.-X.; Sun, G.-Q.; Yu, Z.; Chen, Y. Computational fluid dynamics study of the motion stability of an autonomous underwater helicopter. Ocean Eng. 2017, 143, 227–239. [Google Scholar] [CrossRef]
- Chen, C.-W.; Jiang, Y. Computational Fluid Dynamics Study of Magnus Force on an Axis-Symmetric, Disk-Type AUV with Symmetric Propulsion. Symmetry 2019, 11, 397. [Google Scholar] [CrossRef]
- Chen, Q.; Sun, R. Analysis of launch and recovery UUV model for submarine. Ship Sci. Technol. 2011, 33, 146–149. [Google Scholar]
- Zhang, H.L.; Deng, Z.Y.; Luo, Y.G. Development actuality of submarine launch and recovery system. Ship Sci. Technol. 2012, 34, 3–6. [Google Scholar]
- Sarda, E.I.; Dhanak, M.R. A USV-Based Automated Launch and Recovery System for AUVs. J. Ocean. Eng. Technol. 2017, 42, 37–55. [Google Scholar] [CrossRef]
- Yan, G.-X.; Pan, G.; Shi, Y.; Chao, L.-M.; Zhang, D. Experimental and numerical investigation of water impact on air-launched AUVs. Ocean Eng. 2018, 167, 156–168. [Google Scholar] [CrossRef]
- Techet, A.; Truscott, T. Water entry of spinning hydrophobic and hydrophilic spheres. J. Fluids Struct. 2011, 27, 716–726. [Google Scholar] [CrossRef]
- Truscott, T.T.; Epps, B.P.; Belden, J. Water Entry of Projectiles. Annu. Rev. Fluid Mech. 2014, 46, 355–378. [Google Scholar] [CrossRef]
- Zhao, C.; Wang, C.; Wei, Y.; Zhang, X.; Sun, T. Experimental study on oblique water entry of projectiles. Mod. Phys. Lett. B 2016, 30, 1650348. [Google Scholar] [CrossRef]
- Xia, W.; Wang, C.; Wei, Y.; Li, J. Experimental Study on Water Entry of Inclined Circular Cylinders with Horizontal Velocities. Int. J. Multiph. Flow 2019, 118, 37–49. [Google Scholar] [CrossRef]
- Nair, V.V.; Bhattacharyya, S. Water entry and exit of axisymmetric bodies by CFD approach. J. Ocean Eng. Sci. 2018, 3, 156–174. [Google Scholar] [CrossRef]
- WANG, Y.H.; SHI, X.H.; WANG, P.; WANG, S.W.; ZHAO, J.R. Modeling and Simulation of Oblique Water-Entry of Disk Ogive. Torpedo Technol. 2008, 16, 14–17. [Google Scholar]
- QIU, H.Q.; YUAN, X.L.; WANG, Y.D.; LIU, C.L. Simulation on Impact Load and Cavity Shape in High Speed Vertical Water Entry for an Axisymmetric Body. Torpedo Technol. 2013, 21, 161–164. [Google Scholar]
- Qi, D.; Feng, J.; Xu, B.; Zhang, J.; Li, Y. Investigation of water entry impact forces on airborne-launched AUVs. Eng. Appl. Comput. Fluid Mech. 2016, 10, 475–486. [Google Scholar] [CrossRef]
- Shi, Y.; Pan, G.; Huang, Q. Water entry impact cushioning performance of mitigator for AUV. In Oceans 2017–Aberdeen; IEEE: Aberdeen, UK, 2017. [Google Scholar]
- Ma, Q.P.; He, C.T.; Wang, C.; Wei, Y.J.; Lu, Z.L.; Sun, J. Experimental investigation on vertical water-entry cavity of sphere. Explos. Shock. Waves 2014, 34, 174–180. [Google Scholar]
- Nouri, N.M.; Zeinali, M.; Jahangardy, Y. AUV hull shape design based on desired pressure distribution. J. Mar. Sci. Technol. 2016, 21, 203–215. [Google Scholar] [CrossRef]
- Sodja, J. Turbulence Models in CFD; University of Ljubljana: Ljubljana, Slovenia, 2007; pp. 1–18. [Google Scholar]
- Sakthivel, R.; Vengadesan, S.; Bhattacharyya, S.K. Application of non-linear k-e turbulence model in flow simulation over underwater axisymmetric hull at higher angle of attack. J. Nav. Arch. Mar. Eng. 2011, 8, 149–163. [Google Scholar] [CrossRef]
- Nematollahi, A.; Dadvand, A.; Dawoodian, M. An axisymmetric underwater vehicle-free surface interaction: A numerical study. Ocean Eng. 2015, 96, 205–214. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Chow, P.; Cross, M.; Pericleous, K. A natural extension of the conventional finite volume method into polygonal unstructured meshes for CFD application. Appl. Math. Model. 1996, 20, 170–183. [Google Scholar] [CrossRef]
- Jinxin, Z.; Yumin, S.; Lei, J.; Jian, C. Hydrodynamic performance calculation and motion simulation of an AUV with appendages. In Proceedings of the 2011 International Conference on Electronic & Mechanical Engineering and Information Technology, Harbin, China, 12–14 August 2011; pp. 657–660. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Parameters | Symbol | Unit | Quantitative Values |
|---|---|---|---|
| Diameter of the hull | 1.0 | ||
| Height of the hull | 0.45 | ||
| Weight | W | Kg | 136.45 |
| Service speed | 0.5144~1.5432 | ||
| Density of fresh water | water | 1000.00 | |
| The viscosity coefficient of freshwater movement | Pa∙s | ||
| Density of air | air | 1.00 | |
| Aerodynamic viscosity | Pa∙s | ||
| Run length | 0.40 | ||
| Reynolds number | / |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.-W.; Lu, Y.-F. Computational Fluid Dynamics Study of Water Entry Impact Forces of an Airborne-Launched, Axisymmetric, Disk-Type Autonomous Underwater Hovering Vehicle. Symmetry 2019, 11, 1100. https://doi.org/10.3390/sym11091100
Chen C-W, Lu Y-F. Computational Fluid Dynamics Study of Water Entry Impact Forces of an Airborne-Launched, Axisymmetric, Disk-Type Autonomous Underwater Hovering Vehicle. Symmetry. 2019; 11(9):1100. https://doi.org/10.3390/sym11091100
Chicago/Turabian StyleChen, Chen-Wei, and Yi-Fan Lu. 2019. "Computational Fluid Dynamics Study of Water Entry Impact Forces of an Airborne-Launched, Axisymmetric, Disk-Type Autonomous Underwater Hovering Vehicle" Symmetry 11, no. 9: 1100. https://doi.org/10.3390/sym11091100
APA StyleChen, C.-W., & Lu, Y.-F. (2019). Computational Fluid Dynamics Study of Water Entry Impact Forces of an Airborne-Launched, Axisymmetric, Disk-Type Autonomous Underwater Hovering Vehicle. Symmetry, 11(9), 1100. https://doi.org/10.3390/sym11091100