4. A Detailed Examination of Sphicas [5]
We point out that there are twelve issues in Sphicas [
5] that will be examined in detail in this paper as follows:
The first issue: the partition of the feasible domain in Sphicas [
5] needs revision.
The second issue: We provide a proof for the assertion .
The third issue: We derive a proof to show that increases.
The fourth issue: the domain of in Proposition 1 needs revision, and only using , and , Proposition 2 fails.
The fifth issue: Proposition 3 is completely wrong.
The sixth issue: the expression of in Proposition 4 is tedious. In this paper, we provide a compact expression.
The seventh issue: Proposition 5 contains a typo and the intersection of
and
in the
Figure 1 at
is questionable.
The eighth issue: Comment 1 in
Section 4 with
contains questionable results.
The ninth issue: Comment 1 in
Section 4 with
contains questionable results.
The tenth issue: Comment 1 in
Section 4 with
contains questionable results.
The eleventh issue: Comment 2 in
Section 4 to claim Equation (16) is superior to Equation (9) contains questionable results.
The twelfth issue: the special cases in
Section 5 for
contain questionable results.
The first issue is related to the partition of the feasible domain in Sphicas [
5]. Sphicas [
5] referred to Sphicas [
2]. However, in Sphicas [
2], the partition was restricted as Case (A):
and Case (B):
.
In Sphicas [
5], the partition was set as Case (A):
and Case (C):
.
Sphicas [
5] claimed that for Case (A)
, the minimum solution occurs at
and
. For Case (C)
, backorders are attractive with
and
.
We must point out that his assertion for Case (C) needs revision. In Case (C), if
, then
and
, such that his assertion that “backorders are attractive” is questionable because
implies there are no backorders. Hence, for Case (C), the condition should be revised from
to
, that is, from Case (C) to Case (B). Therefore, we point out that the partition in Sphicas [
5] for the feasible domain contains questionable results.
For the second issue, we recall that Sphicas [
5] mentioned three inventory models:
,
and
as we introduced in Equations (1), (4), and (8), respectively.
Sphicas [
5] compared the optimal order quantities to mention that
and
Sphicas [
5] only mentioned properties of Equations (22) and (23). However, he did not provide any proof to support his observations. In the following, we will provide a patch to verify his assertions of Equations (22) and (23).
Under the restriction of Case (B) with
, we know that
On the other hand, examining being less than is a trivial task.
Now, we begin to discuss Equation (23), that is, Sphicas [
5] compared the optimal average cost to claim that
We know that
is equivalent to
For Case (A)
,
is reduced to
, then
. On the other hand, for Case (B):
, we know the left-hand side of Equation (26) is positive, such that we can square both sides to check whether or not
and then we simplify Equation (27) as
We can rewrite Equation (28) as a perfect square to show that Equation (28) is valid, in order to verify that .
In the following, we will show that his claim of is valid, providing analytical proof for his assertion.
We know that
is equivalent to
We square both sides of Equation (29) and cancel out the common term,
, and then cancel out the common factor,
, to yield
We divide into two conditions: (C1) and (C2) .
Under condition (C1), we know that Equation (30) is valid, and then is proven.
Under condition (C2), we rewrite Equation (30) as
and then we square both sides to simplify it as
and then we derive that
and we cancel out the common factor
, to yield
We summarize our findings in the next theorem.
Theorem 1. Under Case (B) and (C2): and , we show that is equivalent to .
We refer to the abbreviations proposed by Sphicas [
5] to assume that
and
. Under Case (B), we obtain
and then we rewrite our restriction of Equation (34) as
Because , we imply and , and we yield , such that we find that , in order to verify that the inequality of Equation (36) is valid.
Next, we consider Case (A) with . When , is degenerated to , such that the comparison between and becomes a trivial issue.
From the above discussion, therefore, we provide an analytic proof for the assertion of Sphicas [
5] to verify that
.
Remark. For completeness, we point out that in Sphicas [5], page 144, left column, line 23, should be revised to , and on page 144, left column, line 25, should be revised to . For the third issue, Sphicas [
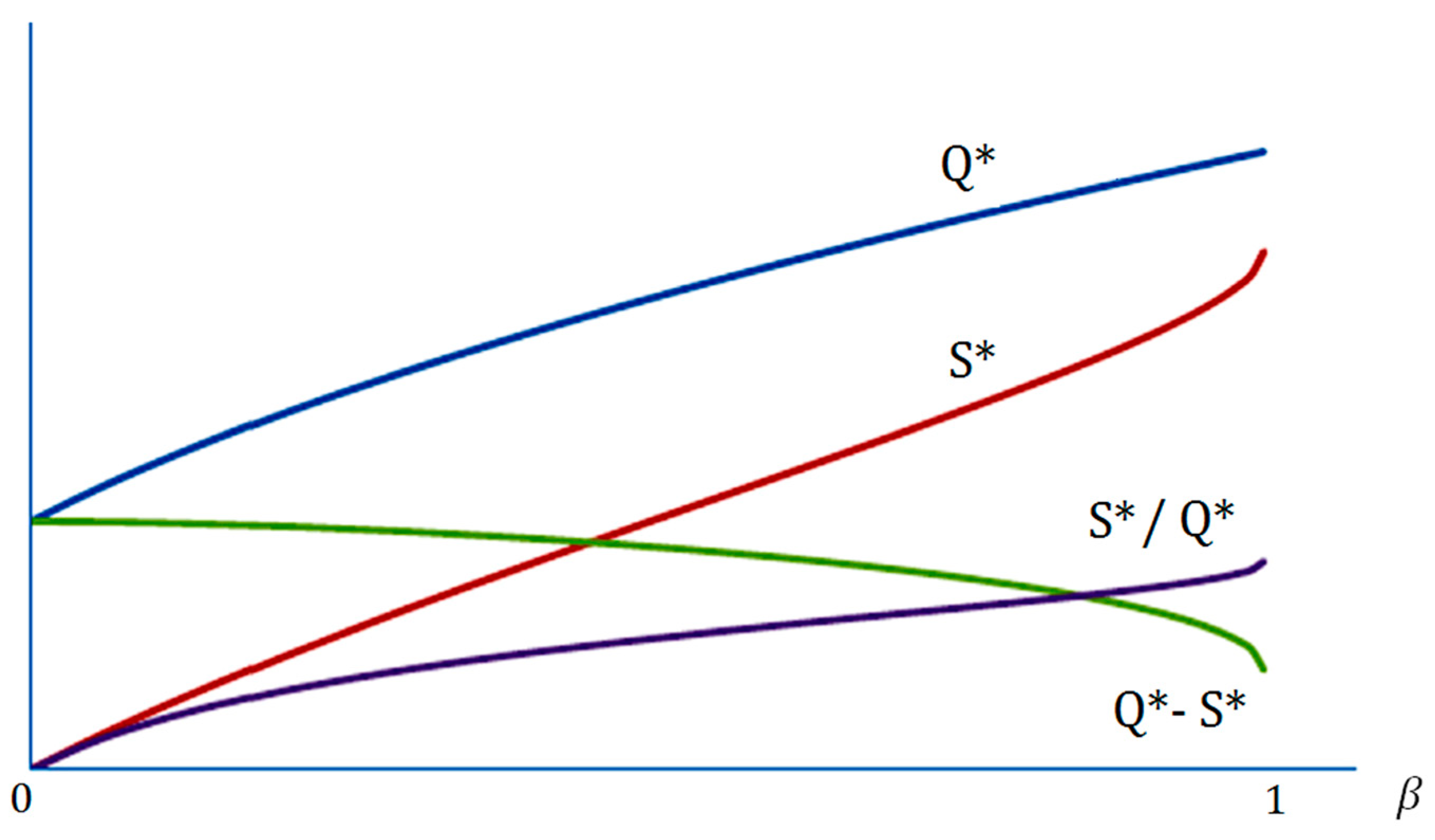
5] claimed that for a proper domain of
, then (a)
and (b)
decrease with
. On the other hand, (c)
and (d)
increase with
. Sphicas [
5] did not offer any explanation to support his assertions. In the following, we will provide analytic proofs for his four assertions. We know the proper domain of
in Case (B), with
, then
and
From Equation (37), we know that
is a decreasing function of
. Because
and
are both decreasing functions of
, then
is a decreasing function of
. From Equation (37), we derive that
Based on Equation (37), we show that
We verify that
is equivalent to
and then we can rewrite the inequality in Equation (41) as
which is Case (B). Therefore, under Case (B), we show that
is an increasing function of
.
At last, for (d), which is that is an increasing function of , owing to Equation (11), we know that , such that is an increasing function of .
For the fourth issue, Sphicas [
5] tried to find a compact relation among
,
and
. We recall Equations (2) and (5), then
such that Sphicas [
5] assumed that
to simplify the expression.
For Case (A) ,
For Case (B)
, we can rewrite
as
Based on Equation (44), Sphicas [
5] assumed that
to combine the findings for both Cases (A) and (B) into one result as
to simplify the expression, and then Sphicas [
5] provided his Propositions 1 and 2. We cite his Proposition 1 in the following.
Proposition 1 of Sphicas [5]. With a fraction in defined as , Model has a unique solution with optimal size given by .
First, we point out that the range of
should be revised from
to
in Proposition 1 of Sphicas [
5].
Second, we must point out that his findings for
contain a typo. Based on Equation (11), it shows that
such that
of Equation (20) should be rewritten as
In Sphicas [
5], Proposition 2, he tried to express
as a multiple of
by an expression that only used
and
. Consequently, we show that the assertion in Proposition 2 of Sphicas [
5] with respect to
failed.
Next, for the fifth issue, we recall the Proposition 3 of Sphicas [
5]. After we revise
to the right expression of Equation (47), then the assertion of Proposition 3 of Sphicas [
5]; “Furthermore, the actual number of distinct parameter values needed to completely solve the model is basically reduced to three: The value
, the fraction value of
, and the ratio of costs
. All other parameter values, such as
,
,
,
and
are indirectly included in these three”, is invalid, because we point out that the expression of
contains
.
For the sixth issue, we recall the Proposition 4 of Sphicas [
5].
Sphicas [
5] mentioned that “it may be noted that with the earlier format of the results, such as presented in the previous papers cited in the introduction, there was no closed-form expression easily obtainable for this ratio.”
We disagree with the above remark from Sphicas [
5]. We recall that
which had appeared in Sphicas [
2]. Based on Equation (49), researchers can easily derive that
where we adopt
to compare our derivation with that of Sphicas [
5] at Equation (21). Now we compare Equations (21) with (50) to reveal that our findings of Equation (50) as
is compact and does not contain the square root. On the other hand, the results of Sphicas [
5] as
are tedious.
We admit that Sphicas [
5] finished his goal to express the result only in notation
and
.
We begin to demonstrate that researchers can easily derive the results of Equation (21) from the following. From our expressions
and
, we show that
which is the finding of Sphicas [
5] cited as Equation (21). We cannot expect that in the future, researchers will use the complicated expression of Equation (21) proposed by Sphicas [
5].
For the seventh issue, we recall the Proposition 5 of Sphicas [
5]. We must point out that in Proposition 5 of Sphicas [
5] “the lower
” is a typo. The revised version should be
.
Next, we begin to discuss the intersection of
and
in
Figure 1. We recall
and
We cite the following paragraphs from Sphicas [
5]; “Another comment on the graph: It is drawn showing the two curves,
and
, intersecting each other. This happens if and only if the value of
is
. When
is less than 1,
is always below
. The point of intersection of
and
occurs when
, provided
.”
We will divide this problem into three cases: Case (a) , Case (b) , and Case (c) .
For Case (a), with
, we derive that
such that
is below
as claimed by Sphicas [
5].
For Case (b), with
, we find that
if and only if
, that is
. In Sphicas [
5], he claimed that
. In our previous discussion of the fourth issue, for Proposition 1 of Sphicas [
5], we already revised the domain of
, from
to
. Hence, 1 is not in the domain of
. We conclude then that
; there is no intersection between
and
.
For Case (c), with
, we compute the intersection between
and
, to imply that
We rewrite Equation (55) as
to square on both sides to yield
such that we obtain that when
, the intersection satisfies
Therefore, our finding of Equation (58) is a revision for the questionable assertion of Sphicas [
5] of
, provided
. We summarize our results in the next Theorem.
Theorem 2. When , the intersection of and occurs at .
For completeness, the assertion of Sphicas [
5], “this happens if and only if the value of
is
”, should be revised from
to
.
For the eighth issue, we recall the following assertion from Comment 1 of
Section 4 of Sphicas [
5]. We cite “Comment 1: The modified EOQ formula (4) (Equation (16) in this paper) can be viewed as a generalization of the two classical EOQ models. Mathematically, one could consider
as a combination of the two basic models, with
taking the role of a binary variable
or
and producing
or
, respectively.”
We must point out that in Proposition 1 of Sphicas [
5], he mentioned that
. In our fourth issue, we improve the domain of
as
. Hence, using
violates his definition of
.
The corrected expression should be improved as follows:
If we take the limit as , then .
For the ninth issue, we cite the following from Sphicas [
5]; “The other values,
,
, and
obviously also lie in-between the corresponding values of the two basic models, but no convenient linear combination form appears obtainable”, in Comment 1 of
Section 4.
We recall that Sphicas [
5] mentioned that
Motivated by Equation (59), we will show that there is a
such that
to reveal that the assertion of Sphicas [
5], in Comment 1 for
, as
lies in-between the corresponding values of
and
, contains questionable results.
We plug Equations (61–63) into Equation (60) to derive that
We simplify Equation (64) to yield that
to demonstrate that our goal of Equation (60) is derived.
For the tenth issue, we will show that there is a
such that
to reveal that the assertion of Sphicas [
5], in Comment 1 for
, as
lies in-between the corresponding values of
and
, contains questionable results.
We plug Equations (67)–(69) into Equation (66) to derive that
which is identical to Equation (64), except the variable is changed from
to
. Hence, we obtain
to demonstrate that our goal of Equation (66) is derived. Therefore, the assertion of Sphicas [
5], in Comment 1 with respect to
contains questionable results.
For the eleventh issue, we cite the following from Comment 2 of
Section 2; “Comment 2: A clear advantage of (4) [Equation (16) in this paper] over (1) [Equation (9) in this paper] is the absence of any negative terms under the square root. Although it is theoretically known that whenever (1) is valid it produces a real value, the reverse is not necessary true: (1) could produce a real value but not be valid, which was one of the points that were made in the earlier work cited here. In the new form (4) [Equation (16) in this paper], that observation can be rephrased as follows. If a negative
is inappropriately substituted in (3) [to the best of our knowledge, (3) is a typo, Sphicas should have typed (4); (3) of Sphicas [
5] is Equation (15), the definition of
], it could be small enough to keep
positive. That would produce a real value for the square root but it would be inappropriate and irrelevant”.
First, we point out that Equations (1) and (4) of Sphicas [
5] correspond to Equations (9) and (16) in this paper.
We must mention that researchers cannot directly compare Equations (9) and (16) in this paper. We recall that Equation (16) is the solution of , which is a combination of two cases: Case (A): and Case (B): .
For Case (A), with
,
and for Case (B), with
,
On the other hand, the result of Equation (9), is only suitable for Case (B), which is identical to Equation (73).
The findings of Equations (9) and (16) are suitable for two different domains, such that to compare them is meaningless.
In Equation (73), there is a negative term “
”. However, we can rewrite Equation (73) as follows:
to show that there is no negative term in Equation (74), as
.
Hence, Sphicas [
5] is criticized because Equation (73) containing a negative term is a false statement.
Second, there are many negative numbers, denoted as
, satisfying
. For example, we take
, then
to demonstrate that there are many negative values that can satisfy
.
However,
of Equation (16) is developed by Sphicas [
5], under the restriction of
.
violates the definition of Sphicas [
5]. Hence, we cannot understand why Sphicas [
5] wanted to discuss the results with respect to
.
The advantage of (4) over (1) (that is Equation (16) and (9), in this paper) as mentioned in Comment 2 of
Section 2 in Sphicas [
5] is a misunderstanding, which we will show by the following.
In Equation (9), the optimal ordering quantity is derived as
to guarantee
, then the restriction
appears.
We recall Equation (13), for the optimal backorder quantity,
,
such that to guarantee
,
.
From
to a stronger condition
, the insufficient condition
is strengthened to the desired condition
Sphicas [
5] did not discuss the conditions of
and
.
We may predict that Sphicas [
5] tried to remind researchers that there are some order quantities that satisfy
(with
, in Equation (16)), but they cannot be accepted as an order quantity.
We consider the problem of checking
, that is
We concentrate on the restriction of
We rewrite Equation (79) as
and then we simplify the inequality of Equation (80) as
which is identical to our discussion of Equation (76) as we expect for
.
Based on our above derivation to check , we finally come to the restriction of Equation (76).
However, we must point out that the examination of is tedious. The easy approach is directly referred to as Equation (9), and then researchers directly derive the restriction of Equation (76).
From our above discussion, Sphicas [
5] not only forgot to check
, but also paid attention to a complicated expression of Equation (16). To check the positivity of Equation (16) is tedious. On the other hand, to check
by Equation (9) is straightforward.
Hence, we point out that the statement of Sphicas [
5], “it could be small enough to keep
positive. That would produce a real value for the square root but it would be inappropriate and irrelevant” is misleading and useless.
For the twelfth issue, we cite
Section 5, Special cases, “the usual special cases noted in the literature include extreme values, such as 0 or infinity for various parameters. Here
is fine, producing the
as a special case of
. Also admissible is the case of
, the situation of backordering everything for ever.”
If we plug
into Equation (8) to yield that
and then we take partial derivatives of Equation (81) and solve
and
, we derive that
and
Based on Equations (82) and (83), we consider
and
From Equations (84) and (85), we derive that
Consequently, we divide our solution procedure into two cases: (i) , and (ii) .
For case (i), under the condition , the first partial derivative system does not have a solution and the optimal solution will occur on the two boundaries: and .
For
and
, the inventory model reduces to
For
and
, the inventory model reduces to
From Equation (87), it is the with the minimum value . From Equation (88), the inferior value, , occurs at .
Based on the above discussion, we further divide case (i) into two sub-cases: case (i-1) , and case (i-2) .
For case (i-1), owing to , the minimum value occurs at .
For case (i-2), from
, we know that numbers exist, denoted as
, that satisfy
to yield that
. For example, if we take
then we derive that
then
is smaller than
.
Hence, the minimum value occurs along the boundary,
. From the mathematical point of view, the inferior value is
However, is not possible in the real world. Therefore, for a practical situation, the decision maker will take an ordering quantity that is as large as possible to decrease the total cost along the boundary, .
On the other hand, for case (ii), under the condition
, Equations (82) and (83) degenerate to Equation (83). Hence, we compute
, under the restriction of
. Then for the interior solution,
for any pair of
and
, satisfying
.
On the two boundaries, from Equation (87), and from Equation (88), the inferior value of .
Hence, for case (ii) with , the minimum value is , that is . We summarize our findings in the next theorem.
Theorem 3. For , with , there are three different results:
For case (i-1), with , then the minimum value ;
For case (i-2), with , then the inferior value is as and approaches infinity.
For case (ii), with , then the minimum value is that is attained for any pair of and , satisfying .
Therefore, when
, only for case (i-2), the assertion of Sphicas [
5] to backlog everything is true. On the other hand, for case (i-1), there is no shortage and then no backorders. Moreover, for case (ii), with the beginning inventory level,
, and any backorder quantity
, will attain the minimum value
.
Consequently, when
, we show that the intuitive assertion of Sphicas [
5] to backlog everything is invalid.



{kind=link}