Improved Sparse Coding Algorithm with Device-Free Localization Technique for Intrusion Detection and Monitoring




Abstract
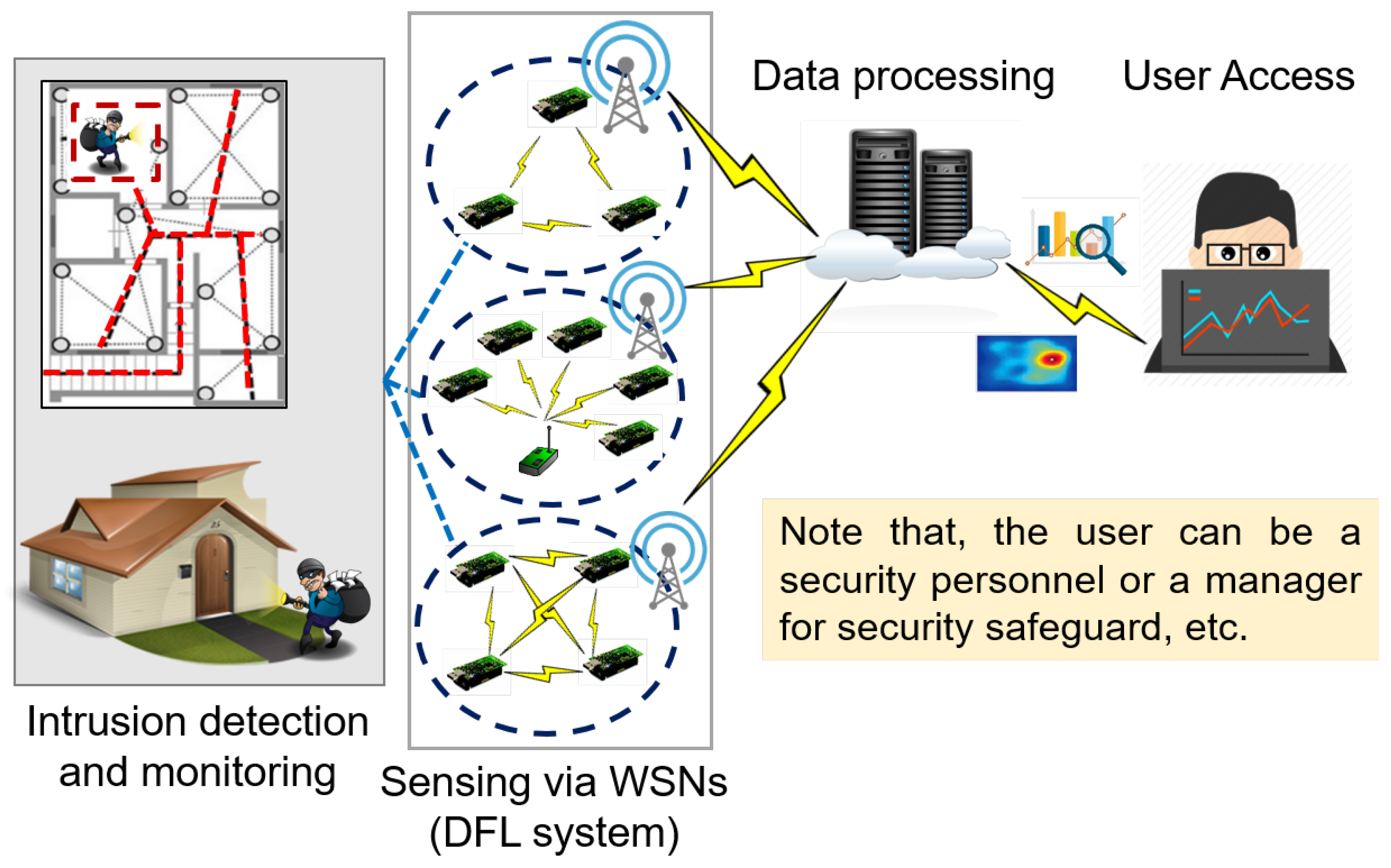
:1. Introduction
- This paper proposes a block-group regularizer to extend the theory of the previous sparse-representation-based frameworks for DFL.
- We propose an improved sparse coding algorithm to achieve the robust DFL. Especially, through a modification on the objective function, we exploit the effective optimization process with the proximal operator for localizing target.
- For evaluating the localization performance and robustness of the proposed method, we establish the testbeds of indoor DFL system. Our experimental results show that the proposed method is more effective than the state-of-the-art sparse coding algorithms for DFL, especially in noisy cases.
2. Related Work
3. Problem Formulation
3.1. Preliminary on System Model
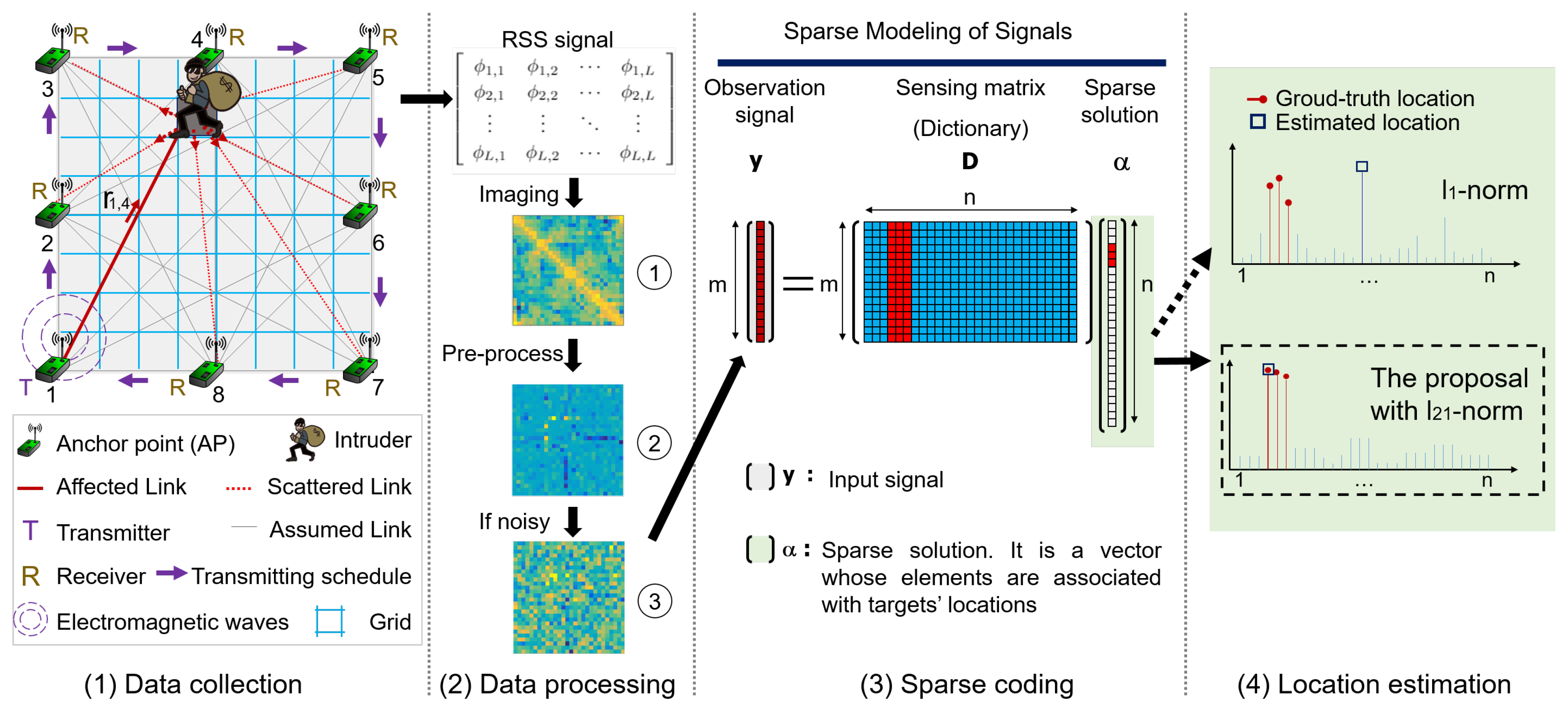
3.2. Sparse Representation Model of DFL
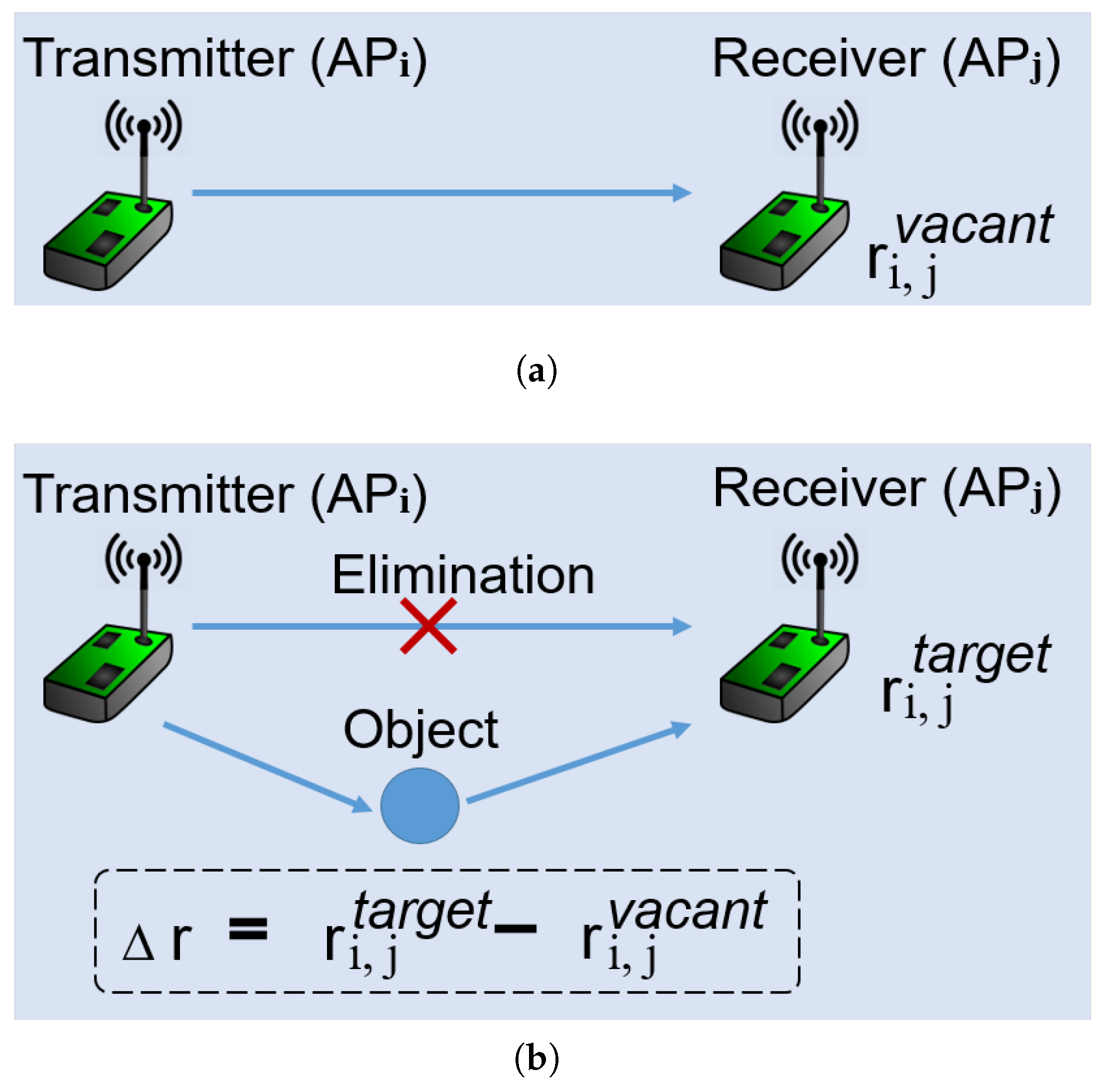
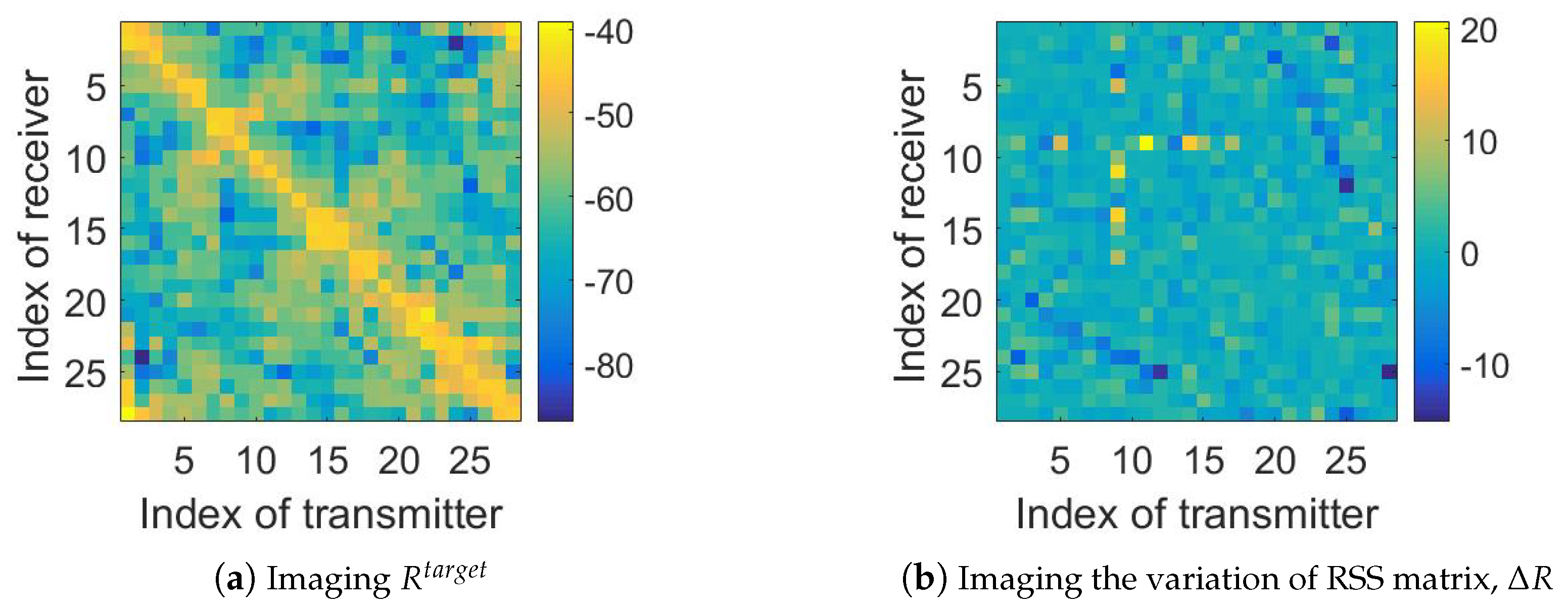
3.2.1. Data Collection and Process of Background Elimination
3.2.2. Dataset Construction
3.2.3. Sparse Representation of Testing Signal
4. Approach
4.1. Proposed Solver
4.1.1. Sparse Coding
4.1.2. Objective Function
4.2. Localization Algorithm with Improved Sparse Coding
4.2.1. Fundamental Sparse Coding Algorithms via Proximal Operator
4.2.2. Improved Sparse Coding Algorithm via Proximal Operator
4.2.3. Target Localization Based on the Improved Sparse Solution
| Algorithm 1 improved Sparse Coding with Proximal Operator (ISCPO). |
| Require:, , Ensure: or {, …, } 1: for do 2: 3: 4: Until convergence or reach the maxiteration number. 5: end for 6: 7: if Single-target localization then 8: Target is located at the -th grid according to (16) 9: 10: end if |
5. Performance Evaluation
5.1. Configuration of Experiment
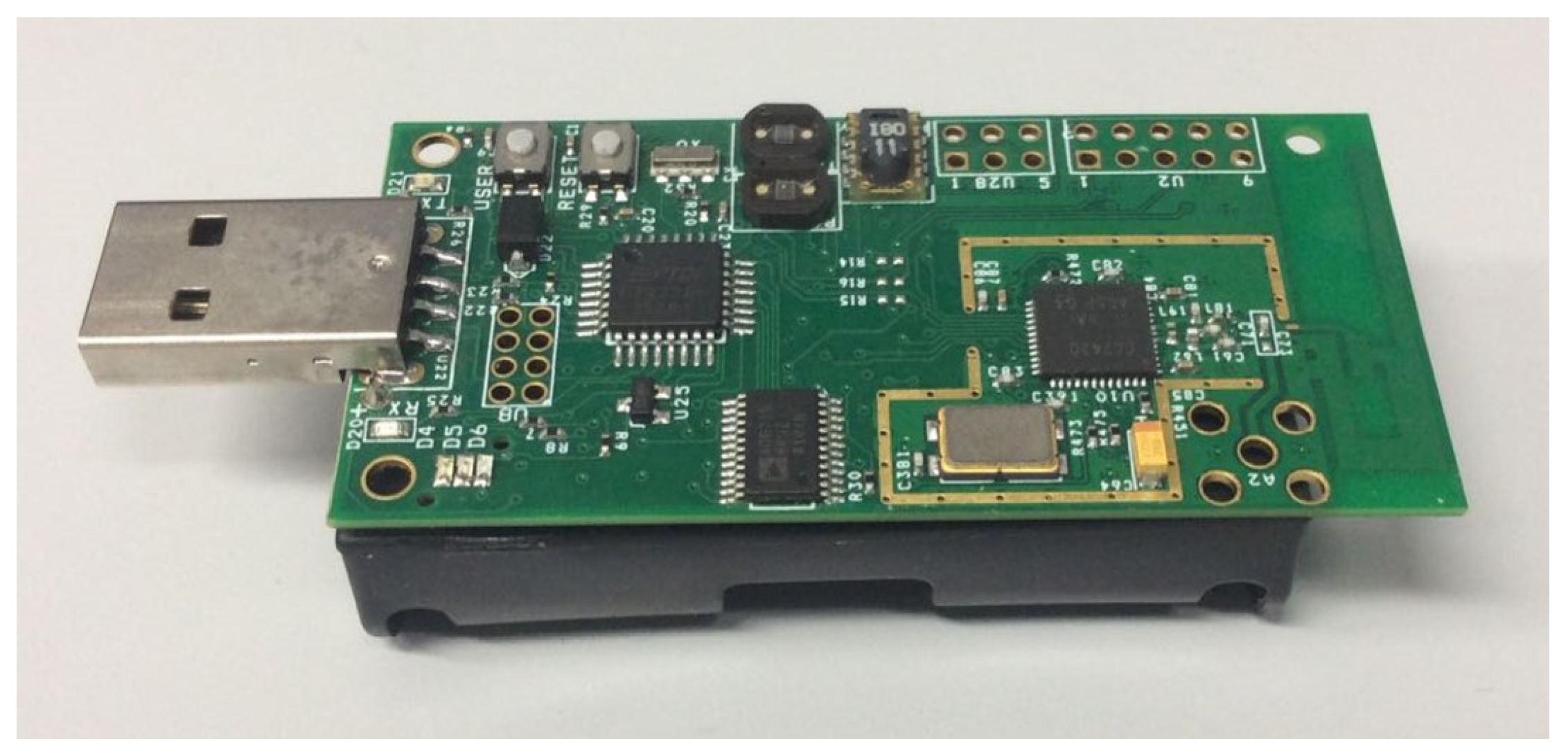
5.1.1. Hardware
5.1.2. Data Pre-Process of Background Elimination
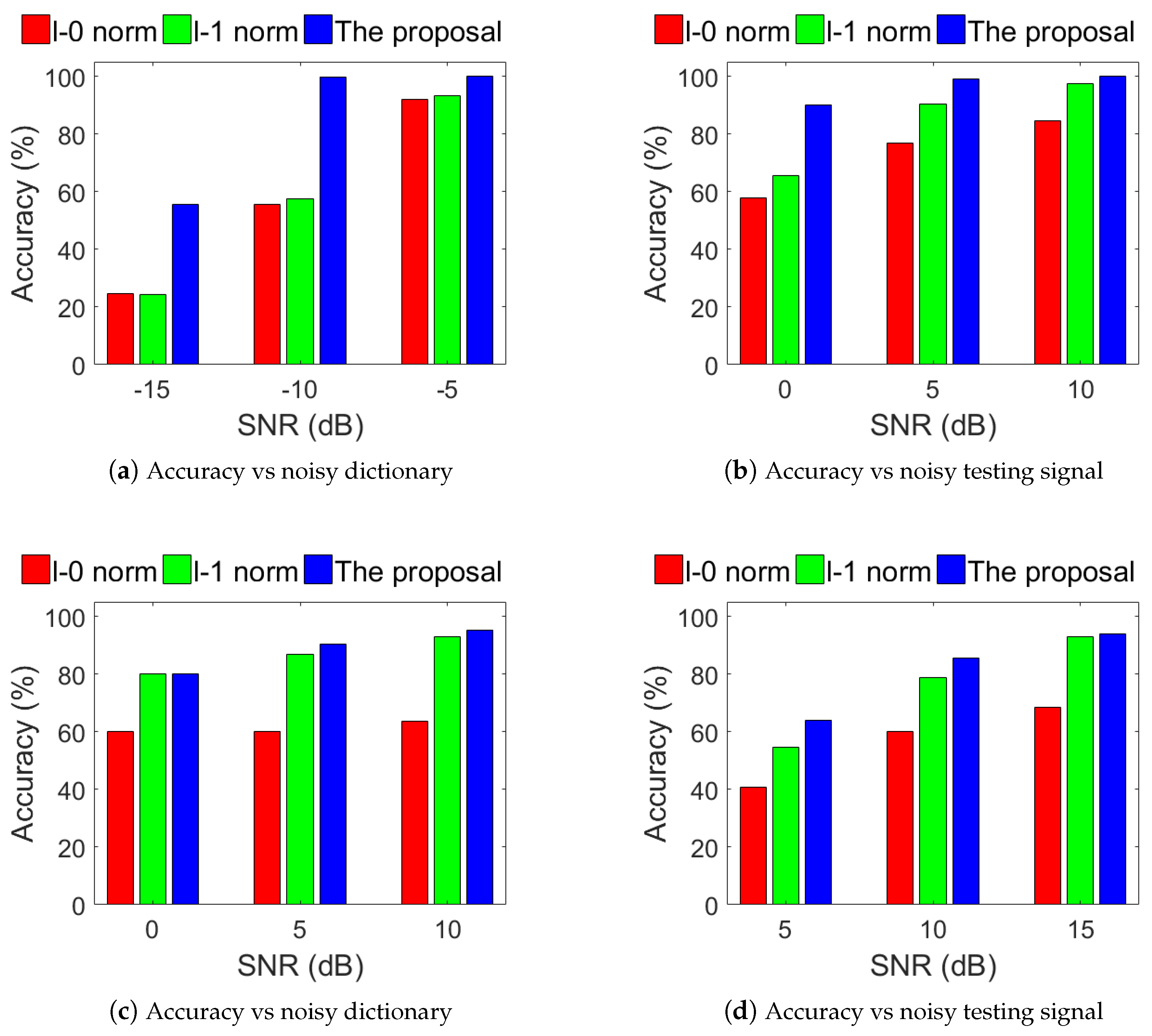
5.1.3. Compared Approaches
5.1.4. Other Settings and Metrics
- Assume that is the total number of testing samples and is the number of samples that are correctly located. Then the localization accuracy is defined by
5.2. Experimental Result of Indoor Localization
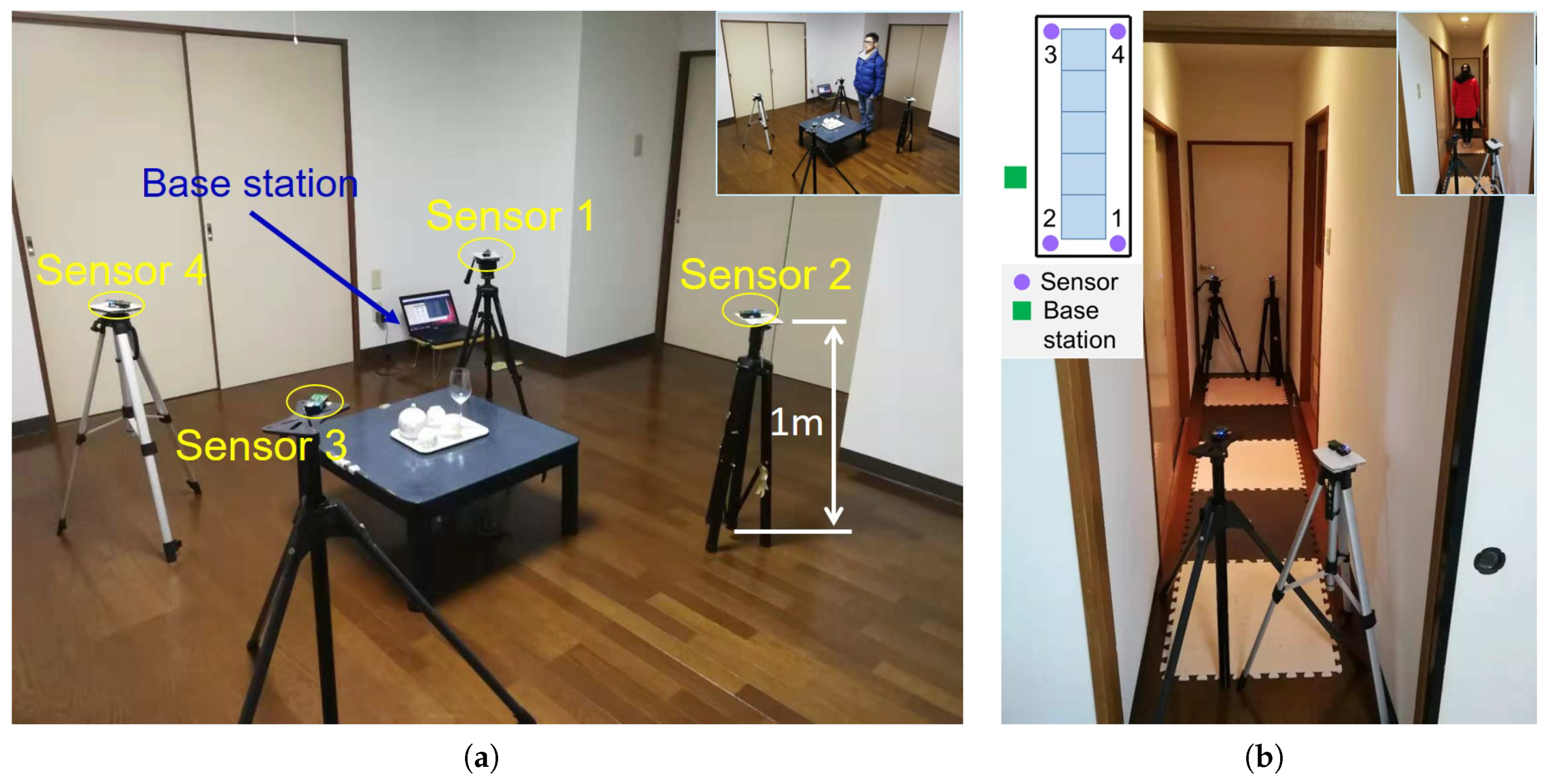
5.2.1. Experimental Setup of Indoor DFL System
5.2.2. Localization Performance of the Proposed Approach and the Comparisons for Indoor DFL
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kolias, C.; Kambourakis, G.; Stavrou, A.; Gritzalis, S. Intrusion detection in 802.11 networks: Empirical evaluation of threats and a public dataset. IEEE Commun. Surv. Tutor. 2016, 18, 184–208. [Google Scholar] [CrossRef]
- Kolias, C.; Kambourakis, G.; Maragoudakis, M. Swarm intelligence in intrusion detection: A survey. Comput. Secur. 2011, 30, 625–642. [Google Scholar] [CrossRef]
- Kaltiokallio, O.; Yigitler, H.; Jantti, R. A three-state received signal strength model for device-free localization. IEEE Trans. Veh. Technol. 2017, 66, 9226–9240. [Google Scholar] [CrossRef]
- Meng, W.; Tischhauser, E.W.; Wang, Q.; Wang, Y.; Han, J. When intrusion detection meets blockchain technology: A review. IEEE Access 2018, 6, 10179–10188. [Google Scholar] [CrossRef]
- Meng, W. Intrusion detection in the era of IoT: Building trust via traffic filtering and sampling. Computer 2018, 51, 36–43. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, H.; Ding, S.; Li, X. An Accurate and Efficient Device-Free Localization Approach Based on Gaussian Bernoulli Restricted Boltzmann Machine. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Miyazaki, Japan, 7–10 October 2018; pp. 2323–2328. [Google Scholar]
- Bisio, I.; Delfino, A.; Lavagetto, F.; Sciarrone, A. Enabling IoT for in-home rehabilitation: Accelerometer signals classification methods for activity and movement recognition. IEEE Internet Things J. 2017, 4, 135–146. [Google Scholar] [CrossRef]
- Verma, P.; Sood, S.K. Fog Assisted-IoT Enabled Patient Health Monitoring in Smart Homes. IEEE Internet Things J. 2018, 5, 1789–1796. [Google Scholar] [CrossRef]
- Zhao, H.; Ding, S.; Li, X.; Huang, H. Deep Neural Network Structured Sparse Coding for Online Processing. IEEE Access 2018, 6, 74778–74791. [Google Scholar] [CrossRef]
- Huang, H.; Zhao, H.; Li, X.; Ding, S.; Zhao, L.; Li, Z. An Accurate and Efficient Device-Free Localization Approach Based on Sparse Coding in Subspace. IEEE Access 2018, 6, 61782–61799. [Google Scholar] [CrossRef]
- Han, Y.; Feng, X.C.; Baciu, G.; Wang, W.W. Nonconvex sparse regularizer based speckle noise removal. Pattern Recognit. 2013, 46, 989–1001. [Google Scholar] [CrossRef]
- Micchelli, C.A.; Morales, J.M.; Pontil, M. Regularizers for structured sparsity. Adv. Comput. Math. 2013, 38, 455–489. [Google Scholar] [CrossRef]
- Li, Z.; Ding, S.; Li, Y.; Yang, Z.; Xie, S.; Chen, W. Manifold optimization-based analysis dictionary learning with an l1/2-norm regularizer. Neural Netw. 2018, 98, 212–222. [Google Scholar] [CrossRef]
- Li, X.; Ding, S.; Li, Z.; Tan, B. Device-free localization via dictionary learning with difference of convex programming. IEEE Sens. J. 2017, 17, 5599–5608. [Google Scholar] [CrossRef]
- Wang, H.; Leung, C.S.; So, H.C.; Liang, J.; Feng, R.; Han, Z. Robust MIMO Radar Target Localization based on Lagrange Programming Neural Network. arXiv 2018, arXiv:1805.12300. [Google Scholar]
- Wang, J.; Gao, Q.; Wang, H.; Cheng, P.; Xin, K. Device-free localization with multidimensional wireless link information. IEEE Trans. Veh. Technol. 2015, 64, 356–366. [Google Scholar] [CrossRef]
- Wang, D.; Guo, X.; Zou, Y. Accurate and robust device-free localization approach via sparse representation in presence of noise and outliers. In Proceedings of the IEEE International Conference on Digital Signal Processing (DSP), Beijing, China, 16–18 October 2016; pp. 199–203. [Google Scholar]
- Kolias, C.; Kolias, V.; Kambourakis, G. TermID: A distributed swarm intelligence-based approach for wireless intrusion detection. Int. J. Inf. Secur. 2017, 16, 401–416. [Google Scholar] [CrossRef]
- Zhang, B.; Cheng, X.; Zhang, N.; Cui, Y.; Li, Y.; Liang, Q. Sparse target counting and localization in sensor networks based on compressive sensing. In Proceedings of the INFOCOM, 2011 Proceedings IEEE, Shanghai, China, 10–15 April 2011; pp. 2255–2263. [Google Scholar]
- Wang, J.; Gao, Q.; Wang, H.; Yu, Y.; Jin, M. Time-of-flight-based radio tomography for device free localization. IEEE Trans. Wirel. Commun. 2013, 12, 2355–2365. [Google Scholar] [CrossRef]
- Li, Z. Efficient Learning Algorithms for Overcomplete Dictionaries for Sparse Representation of Signal. Ph.D. Thesis, The University of Aizu, Aizu-Wakamatsu, Japan, 2015. [Google Scholar]
- Feng, C.; Au, W.S.A.; Valaee, S.; Tan, Z. Received-signal-strength-based indoor positioning using compressive sensing. IEEE Trans. Mob. Comput. 2012, 11, 1983–1993. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, H.; Li, X.; Ding, S.; Zhao, H.; Han, Z. An Accurate and Robust Approach of Device-Free Localization with Convolutional Autoencoder. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Wright, J.; Yang, A.Y.; Ganesh, A.; Sastry, S.S.; Ma, Y. Robust face recognition via sparse representation. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 210–227. [Google Scholar] [CrossRef]
- Zhu, X.; Li, X.; Zhang, S.; Ju, C.; Wu, X. Robust joint graph sparse coding for unsupervised spectral feature selection. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 1263–1275. [Google Scholar] [CrossRef] [PubMed]
- Figueiredo, M.A.; Bioucas-Dias, J.M.; Nowak, R.D. Majorization–minimization algorithms for wavelet-based image restoration. IEEE Trans. Image Process. 2007, 16, 2980–2991. [Google Scholar] [CrossRef]
- Selesnick, I.W. Sparse Signal Restoration. Available online: http://cnx.org/content/m32168/latest (accessed on 28 April 2019).
- Wilson, J.; Patwari, N. Radio tomographic imaging with wireless networks. IEEE Trans. Mob. Comput. 2010, 9, 621–632. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, X.; Gao, Q.; Yue, H.; Wang, H. Device-Free Wireless Localization and Activity Recognition: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2017, 66, 6258–6267. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Compared Terms | Regularizer | Formula | Sparse Pattern |
|---|---|---|---|
| The previous works [10,16,17] | norm | Element-wise | |
| The proposed approach | norm | Joint elements (improved sparsity) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Han, Z.; Ding, S.; Su, C.; Zhao, L. Improved Sparse Coding Algorithm with Device-Free Localization Technique for Intrusion Detection and Monitoring. Symmetry 2019, 11, 637. https://doi.org/10.3390/sym11050637
Huang H, Han Z, Ding S, Su C, Zhao L. Improved Sparse Coding Algorithm with Device-Free Localization Technique for Intrusion Detection and Monitoring. Symmetry. 2019; 11(5):637. https://doi.org/10.3390/sym11050637
Chicago/Turabian StyleHuang, Huakun, Zhaoyang Han, Shuxue Ding, Chunhua Su, and Lingjun Zhao. 2019. "Improved Sparse Coding Algorithm with Device-Free Localization Technique for Intrusion Detection and Monitoring" Symmetry 11, no. 5: 637. https://doi.org/10.3390/sym11050637
APA StyleHuang, H., Han, Z., Ding, S., Su, C., & Zhao, L. (2019). Improved Sparse Coding Algorithm with Device-Free Localization Technique for Intrusion Detection and Monitoring. Symmetry, 11(5), 637. https://doi.org/10.3390/sym11050637