Nonlinear Consensus Protocol Modified from Doubly Stochastic Quadratic Operators in Networks of Dynamic Agents

 , ,
, ,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- To find the optimal decision of the group.
- To investigate simple mathematical nonlinear consensus protocol.
2. Background
3. Materials and Methods
- (i)
- The sum of all m matrices is a matrix with all entries as ones as follows:
- (ii)
- The sum of each row or column in each matrix is stochastic and the sum of all m matrices is a matrix with all entries as ones as follows:
- (iii)
- Triple stochastic matrix, where the sum of each row and column in each matrix is stochastic and the sum of all m matrices is a matrix with all entries as ones as follows:
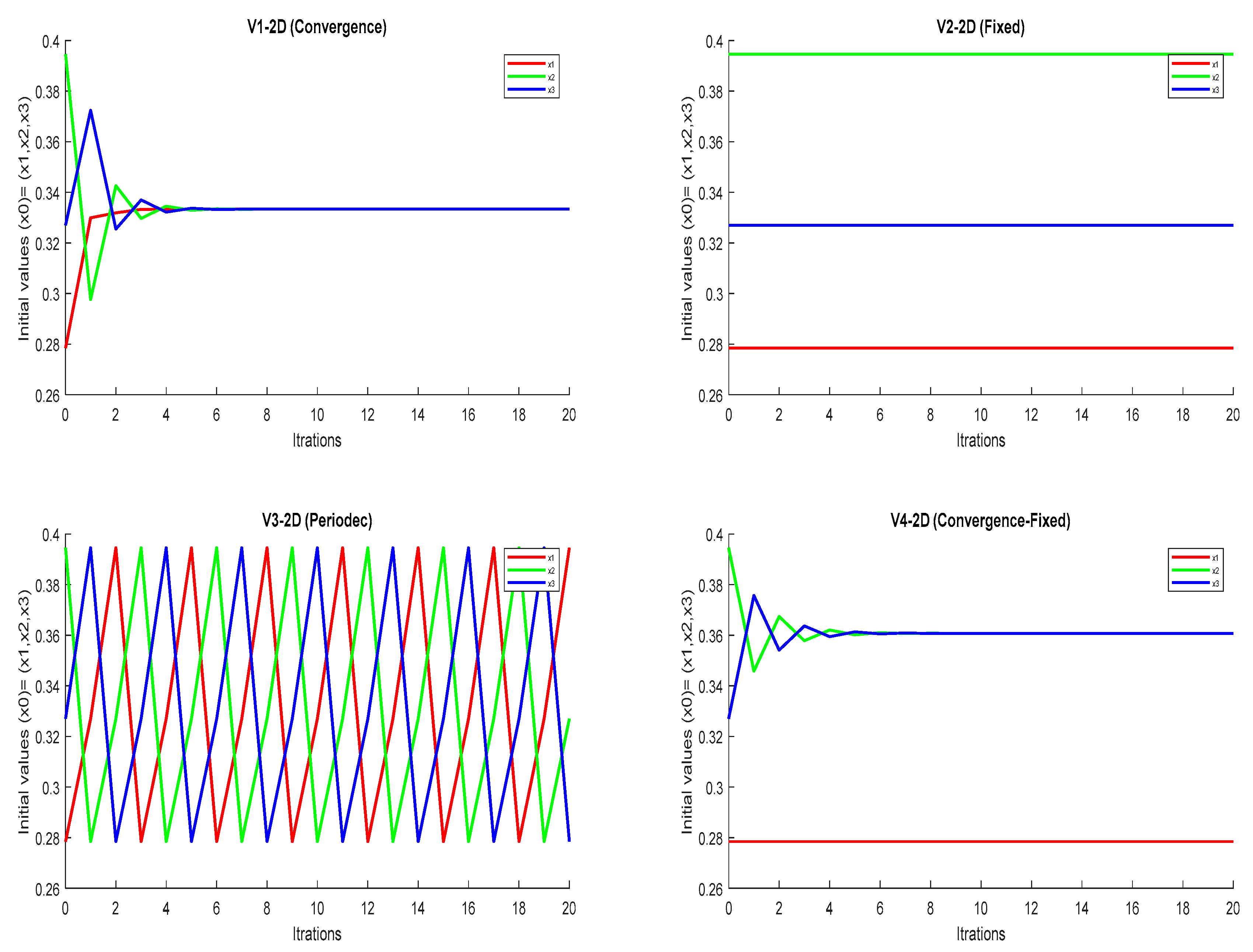
4. Results
5. Numerical Solution
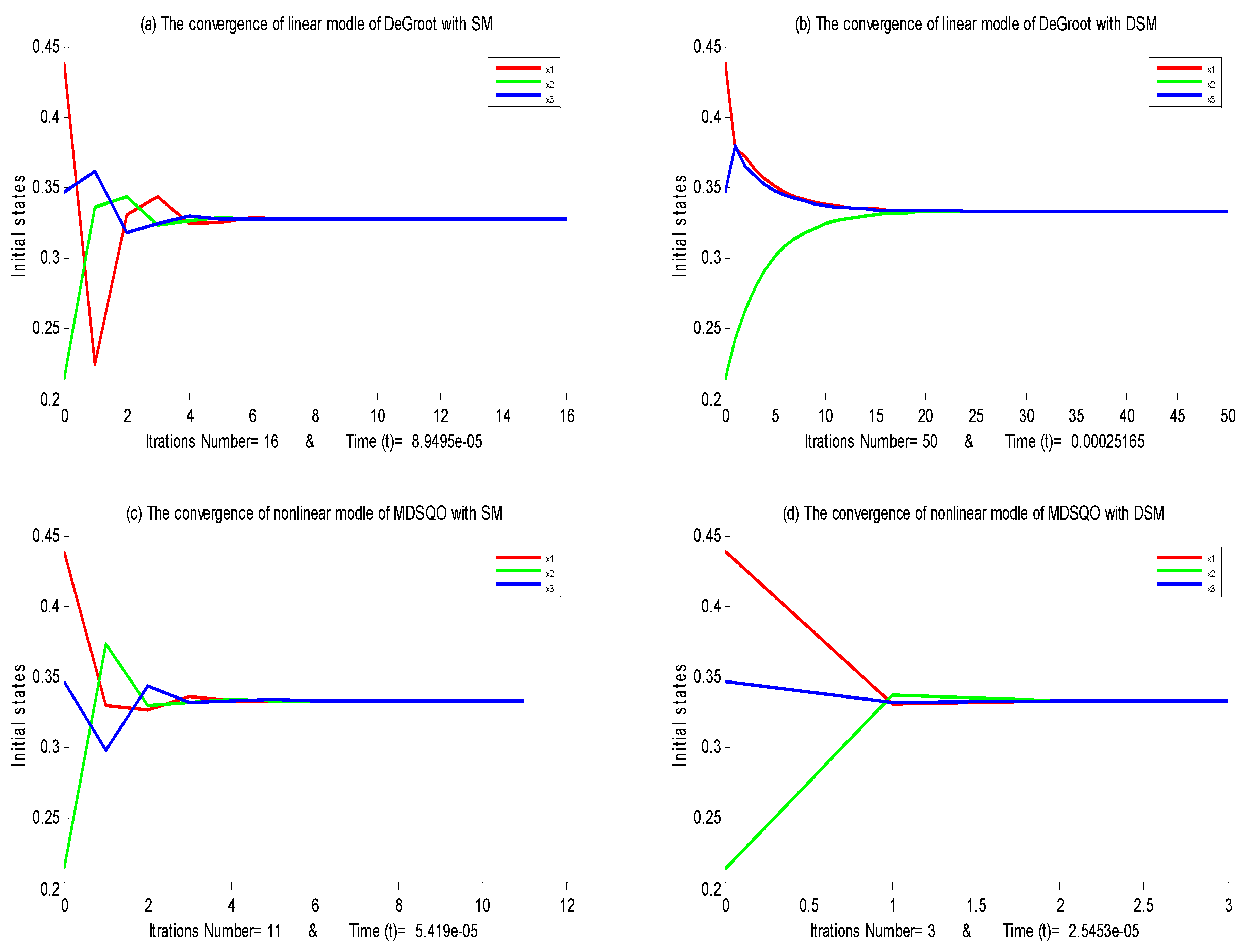
6. Comparison Study between the Nonlinear Model of MDSQO and DeGroot’s Linear Model
7. The Comparison of the Convergence of MDSQO with DSQO
8. Discussion and Critical Reflection of the Research
9. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- DeGroot, M.H. Reaching a consensus. J. Am. Stat. Assoc. 1974, 69, 118–121. [Google Scholar] [CrossRef]
- Wooldridge, M. Intelligent Agents. Multiagent Syst. 1999, 10, 51. [Google Scholar]
- Olfati-Saber, R.; Murray, R.M. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Automat. Contr. 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W.; Atkins, E.M. A survey of consensus problems in multi-agent coordination. In Proceedings of the 2005 American Control Conference; IEEE: Piscatway, NJ, USA, 2005; Volume 2005, pp. 1859–1864. [Google Scholar]
- Meng, D.; Jia, Y.; Du, J.; Zhang, J. On iterative learning algorithms for the formation control of nonlinear multi-agent systems. Automatica 2014, 50, 291–295. [Google Scholar] [CrossRef]
- Ding, D.; Wang, Z.; Shen, B.; Wei, G. Event-triggered consensus control for discrete-time stochastic multi-agent systems: The input-to-state stability in probability. Automatica 2015, 62, 284–291. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Abdullah, S.S.; Turaev, S.; Othman, M. An overview of the consensus problem in the control of multi-agent systems. Automatika 2018, 59, 143–157. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Turaev, S. Consensus of fractional nonlinear dynamics stochastic operators for multi-agent systems. Inf. Fusion 2018, 44, 1–21. [Google Scholar] [CrossRef]
- Fax, J.A.; Murray, R.M. Information flow and cooperative control of vehicle formations. IEEE Trans. Autom. Contr. 2004, 49, 1465–1476. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y. Average consensus in networks of multi-agents with both switching topology and coupling time-delay. Phys. A Stat. Mech. Appl. 2008, 387, 303–313. [Google Scholar] [CrossRef]
- Monshizadeh, N.; Trentelman, H.L.; Camlibel, M.K. Stability and synchronization preserving model reduction of multi-agent systems. Syst. Control Lett. 2013, 62, 1–10. [Google Scholar] [CrossRef]
- Trentelman, H.L.; Takaba, K.; Monshizadeh, N. Robust synchronization of uncertain linear multi-agent systems. IEEE Trans. Automat. Contr. 2013, 58, 1511–1523. [Google Scholar] [CrossRef]
- Yu-Mei, L.; Xin-Ping, G. Nonlinear consensus protocols for multi-agent systems based on centre manifold reduction. Chin. Phys. B 2009, 18, 3355–3366. [Google Scholar] [CrossRef]
- Sun, W.; Li, Y.; Li, C.; Chen, Y. Convergence speed of a fractional order consensus algorithm over undirected scale-free networks. Asian J. Control 2011, 13, 936–946. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, L. Distributed consensus of heterogeneous multi-agent systems with fixed and switching topologies. Int. J. Control 2012, 85, 1967–1976. [Google Scholar] [CrossRef]
- Systems, F.; Cao, Y.; Member, S.; Li, Y.; Ren, W. Distributed Coordination of Networked. Syst. Man. Cybern. Part B Cybern. IEEE Trans. 2010, 40, 362–370. [Google Scholar]
- Abdulghafor, R.; Turaev, S.; Tamrin, M. Nonlinear consensus for multi-agent systems using positive intractions of doubly stochastic quadratic operators. Int. J. Perceptive Cogn. Comput. 2016, 2, 19–22. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Turaev, S.; Zeki, A.; Al-Shaikhli, I. Reach a nonlinear consensus for MAS via doubly stochastic quadratic operators. Int. J. Control 2017, 91, 1431–1459. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Turaev, S.; Zeki, A.; Abubaker, A. Nonlinear convergence algorithm: Structural properties with doubly stochastic quadratic operators for multi-agent systems. J. Artif. Intell. Soft Comput. Res. 2018, 8, 49–61. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Abdullah, S.S.; Turaev, S.; Zeki, A.; Al-Shaikhli, I. Linear and nonlinear stochastic distribution for consensus problem in multi-agent systems. Neural Comput. Appl. 2018, 1–17. [Google Scholar] [CrossRef]
- Li, Y.; Voos, H.; Darouach, M.; Hua, C. Nonlinear protocols for distributed consensus in directed networks of dynamic agents. J. Franklin Inst. 2015, 352, 3645–3669. [Google Scholar] [CrossRef]
- Li, Z.; Wen, G.; Duan, Z.; Ren, W. Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs. IEEE Trans. Automat. Contr. 2015, 60, 1152–1157. [Google Scholar] [CrossRef]
- Andreasson, M.; Dimarogonas, D.V.; Johansson, K.H. Undamped nonlinear consensus using integral Lyapunov functions. Am. Control Conf. 2012, 2012, 6644–6649. [Google Scholar]
- Bauso, D.; Giarré, L.; Pesenti, R. Non-linear protocols for optimal distributed consensus in networks of dynamic agents. Syst. Control Lett. 2006, 55, 918–928. [Google Scholar] [CrossRef]
- Li, Z.; Ren, W.; Liu, X.; Fu, M. Consensus of multi-agent systems with general linear and Lipschitz nonlinear dynamics using distributed adaptive protocols. IEEE Trans. Automat. Contr. 2013, 58, 1786–1791. [Google Scholar] [CrossRef]
- Saber, R.O.; Murray, R.M. Consensus protocols for networks of dynamic agents. In Proceedings of the 2003 American Control Conference; IEEE: Piscatway, NJ, USA, 2003. [Google Scholar]
- Zhu, Y.-K.; Guan, X.-P.; Luo, X.-Y. Finite-time consensus for multi-agent systems via nonlinear control protocols. Int. J. Autom. Comput. 2013, 10, 455–462. [Google Scholar] [CrossRef][Green Version]
- Zuo, Z.Y.; Tie, L. A new class of finite-time nonlinear consensus protocols for multi-agent systems. Int. J. Control 2014, 87, 363–370. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, K.; You, Z.; Zheng, L. A nonlinear consensus protocol of multiagent systems considering measuring errors. Math. Probl. Eng. 2013, 2013, 8. [Google Scholar] [CrossRef]
- Li, Y.; Guan, X.; Hua, C. Nonlinear protocols for output performance value consensus of multi-agent systems. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 22–24 July 2011; pp. 4831–4834. [Google Scholar]
- Tang, Y.; Gao, H.; Zou, W.; Kurths, J. Distributed synchronization in networks of agent systems with nonlinearities and random switchings. IEEE Trans. Cybern. 2013, 43, 358–370. [Google Scholar] [CrossRef]
- Feng, Y.; Xu, S.; Lewis, F.L.; Zhang, B. Consensus of heterogeneous first-and second-order multi-agent systems with directed communication topologies. Int. J. Robust Nonlinear Control 2015, 25, 362–375. [Google Scholar] [CrossRef]
- Goodwine, B. Fractional-order dynamics in a random, approximately scale-free network of agents. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1581–1586. [Google Scholar]
- Li, H.; Chen, G.; Dong, Z.; Xia, D. Consensus analysis of multiagent systems with second-order nonlinear dynamics and general directed topology: An event-triggered scheme. Inf. Sci. 2016, 370, 598–622. [Google Scholar] [CrossRef]
- Li, H.; Liao, X.; Lei, X.; Huang, T.; Zhu, W. Second-order consensus seeking in multi-agent systems with nonlinear dynamics over random switching directed networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2013, 60, 1595–1607. [Google Scholar] [CrossRef]
- Proskurnikov, A. Consensus in switching networks with sectorial nonlinear couplings. Automatica 2013, 49, 488–495. [Google Scholar] [CrossRef]
- Su, Y.; Huang, J. Cooperative Global Output Regulation of Heterogenous Second-Order Nonlinear Uncertain Multi-Agent Systems. Automatica 2013, 49, 1–7. [Google Scholar] [CrossRef]
- Yu, S.; Long, X. Finite-time consensus for second-order multi-agent systems with disturbances by integral sliding mode. Automatica 2015, 54, 158–165. [Google Scholar] [CrossRef]
- Zhao, L.; Jia, Y. Finite-time consensus for second-order stochastic multi-agent systems with nonlinear dynamics. Appl. Math. Comput. 2015, 270, 278–290. [Google Scholar] [CrossRef]
- Bradley, R. Reaching a consensus. Soc. Choice Welfare 2007, 29, 609–632. [Google Scholar] [CrossRef]
- Hou, J.; Xiang, M.; Ding, Z. Group Information based Nonlinear Consensus for Multi-agent Systems. IEEE Access 2019, 7, 26551–26557. [Google Scholar] [CrossRef]
- Sun, F.; Turkoglu, K. Nonlinear consensus strategies for multi-agent networks under switching topologies: Real-time receding horizon approach. Aerosp. Sci. Technol. 2019, 87, 323–330. [Google Scholar] [CrossRef]
- Yang, S.; Wang, J.; Liu, Q. Consensus of Heterogeneous Nonlinear Multi-Agent Systems with Duplex Control Laws. IEEE Trans. Automat. Contr. 2019, 64, 5140–5147. [Google Scholar] [CrossRef]
- Shi, S.; Feng, H.; Liu, W.; Zhuang, G. Finite-time consensus of high-order heterogeneous multi-agent systems with mismatched disturbances and nonlinear dynamics. Nonlinear Dyn. 2019, 96, 1317–1333. [Google Scholar] [CrossRef]
- Wang, Z. Guaranteed Performance Consensus for Multi-Agent Systems. Multi Agent Syst. Control Spectr. 2019. [Google Scholar] [CrossRef]
- Moreau, L. Stability of multiagent systems with time-dependent communication links. IEEE Trans. Automat. Contr. 2005, 50, 169–182. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Cao, M.; Kurths, J. Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics. IEEE Trans. Syst. Man. Cybern. Part B 2010, 40, 881–891. [Google Scholar]
- Bishop, A.N.; Doucet, A. Consensus in the Wasserstein Metric Space of Probability Measures. arXiv 2014, arXiv:1404.0145. [Google Scholar]
- Hui, W.M.; Haddad, Q. Distributed nonlinear control algorithms for network consensus. Automatica 2008, 44, 2375–2381. [Google Scholar] [CrossRef]
- Zhu, M.; Martínez, S. Discrete-time dynamic average consensus. Automatica 2010, 46, 322–329. [Google Scholar] [CrossRef]
- Buşoniu, L.; Morărescu, I.C. Consensus for black-box nonlinear agents using optimistic optimization. Automatica 2014, 50, 1201–1208. [Google Scholar] [CrossRef]
- Ajorlou, A.; Momeni, A.; Aghdam, A.G. Sufficient conditions for the convergence of a class of nonlinear distributed consensus algorithms. Automatica 2011, 47, 625–629. [Google Scholar] [CrossRef]
- Berger, R.L. A necessary and sufficient condition for reaching a consensus using DeGroot’s method. J. Am. Stat. Assoc. 1981, 76, 415–418. [Google Scholar] [CrossRef]
- Enrico, S.L.; Zampieri, S. Performance metrics in the consensus problem: A survey? IFAC Proc. 2010, 36, 324–335. [Google Scholar]
- Shahidi, F.; Ganikhodzhaev, R.; Abdulghafor, R. The dynamics of some extreme doubly stochastic quadratic operators. Middle East J. Sci. Res. 2013, 13, 59–63. [Google Scholar]
- Abdulghafor, R.; Abdullah, S.S.; Turaev, S.; Hassan, R. The nonlinear limit control of EDSQOs on finite dimensional simplex. Automatika 2019, 60, 404–412. [Google Scholar] [CrossRef]
- Bernstein, S. Solution of a mathematical problem connected with the theory of heredity. Ann. Math. Stat. 1942, 13, 53–61. [Google Scholar] [CrossRef]
- Lyubich, Y.I.; Vulis, D.; Karpov, A.; Akin, E. Mathematical structures in population genetics. Biomathematics 1992, 22, 373. [Google Scholar]
- Ganikhodzhaev, R.N.; Rozikov, U.A. Quadratic stochastic operators: Results and open problems. arXiv 2009, arXiv:0902.4207. [Google Scholar] [CrossRef]
- Shahidi, F.A.; Osman, M.T.A. The limit behaviour of trajectories of dissipative quadratic stochastic operators on finite-dimensional simplex. J. Differ. Equ. Appl. 2013, 19, 357–371. [Google Scholar] [CrossRef]
- Lyubich, Y.I. Mathematical structures in Population Genetics. Biomathematics 1983, 22, 373. [Google Scholar]
- Vallander, S.S. On the limit behavior of iteration sequence of certain quadratic transformations. Sov. Math. Dokl. 1972, 13, 123–126. [Google Scholar]
- Ganikhodzhaev, R.N. On the definition of bistochastic quadratic operators. Russ. Math. Surv. 1993, 48, 244–246. [Google Scholar] [CrossRef]
- Shahidi, F. Necessary and sufficient conditions for doubly stochasticity of infinite-dimensional quadratic operators. Linear Algebra Appl. 2013, 438, 96–110. [Google Scholar] [CrossRef]
- Shahidi, F. On dissipative quadratic stochastic operators. arXiv 2007, arXiv:0708.1813. [Google Scholar]
- Abdulghafor, R.; Turaev, S.; Zeki, A. Necessary and Sufficient Conditions for Complementary Stochastic Quadratic Operators of Finite-Dimensional Simplex. Sukkur IBA J. Comput. Math. Sci. 2017, 1, 22–27. [Google Scholar] [CrossRef]
- Ganikhodzhaev, R.; Shahidi, F. Doubly stochastic quadratic operators and Birkhoff’s problem. Linear Algebra Appl. 2010, 432, 24–35. [Google Scholar] [CrossRef][Green Version]
- Olkin, I.; Marshall, A.W. Inequalities: Theory of Majorization and Its Applications; Academic Press: Cambridge, MA, USA, 2016; Volume 143. [Google Scholar]
- Abdulghafor, R.; Shahidi, F.; Zeki, A.; Turaev, S. Dynamics of doubly stochastic quadratic operators on a finite-dimensional simplex. Open Math. 2016, 14, 509–519. [Google Scholar] [CrossRef]
- Abdulghafor, R.; Shahidi, F.; Zeki, A.; Turaev, S. Dynamics classifications of extreme doubly stochastic quadratic operators on 2d simplex. In Advanced Computer and Communication Engineering Technology; Springer: Cham, Switzerland, 2016; pp. 323–335. [Google Scholar]
- Abdulghafor, R.; Turaev, S.; Abubakar, A.; Zeki, A. The extreme doubly stochastic quadratic operators on two dimensional simplex. In Proceedings of the 2015 4th International Conference on Advanced Computer Science Applications and Technologies (ACSAT), Kuala Lumpur, Malaysia, 8–10 December 2015; pp. 192–197. [Google Scholar]
- Abdulghafor, R.; Turaev, S.; Zeki, A. The Convergence Consensus of Multi-agent Systems Controlled via Doubly Stochastic Quadratic Operators. Int. J. Control 2018, 22, 1–21. [Google Scholar]















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdulghafor, R.; Almotairi, S.; Almohamedh, H.; Turaev, S.; Almutairi, B. Nonlinear Consensus Protocol Modified from Doubly Stochastic Quadratic Operators in Networks of Dynamic Agents. Symmetry 2019, 11, 1519. https://doi.org/10.3390/sym11121519
Abdulghafor R, Almotairi S, Almohamedh H, Turaev S, Almutairi B. Nonlinear Consensus Protocol Modified from Doubly Stochastic Quadratic Operators in Networks of Dynamic Agents. Symmetry. 2019; 11(12):1519. https://doi.org/10.3390/sym11121519
Chicago/Turabian StyleAbdulghafor, Rawad, Sultan Almotairi, Hamad Almohamedh, Sherzod Turaev, and Badr Almutairi. 2019. "Nonlinear Consensus Protocol Modified from Doubly Stochastic Quadratic Operators in Networks of Dynamic Agents" Symmetry 11, no. 12: 1519. https://doi.org/10.3390/sym11121519
APA StyleAbdulghafor, R., Almotairi, S., Almohamedh, H., Turaev, S., & Almutairi, B. (2019). Nonlinear Consensus Protocol Modified from Doubly Stochastic Quadratic Operators in Networks of Dynamic Agents. Symmetry, 11(12), 1519. https://doi.org/10.3390/sym11121519