An Analysis of the Dynamical Behaviour of Systems with Fractional Damping for Mechanical Engineering Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Theoretical Background: A 1 DOF System with Fractional Damping
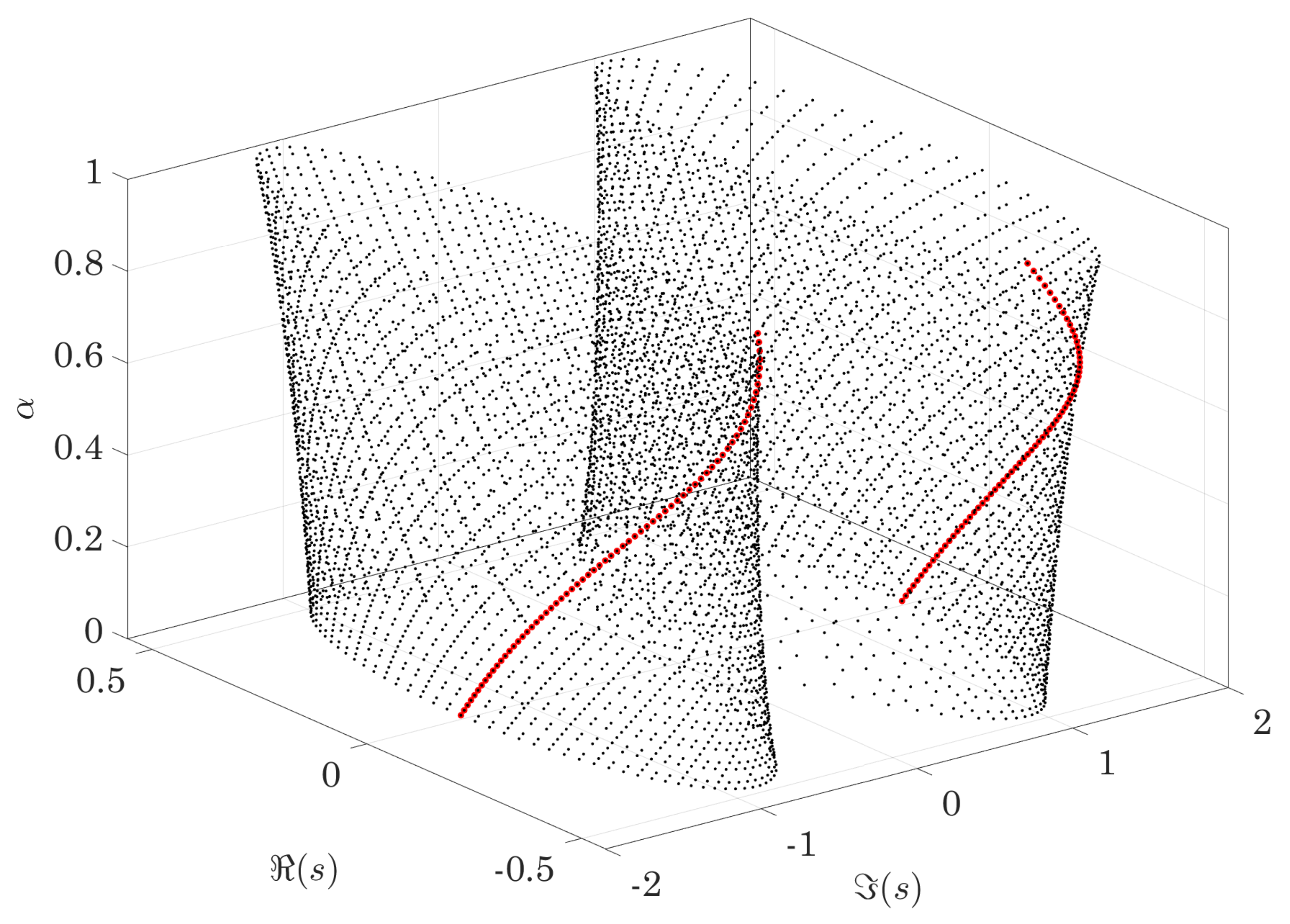
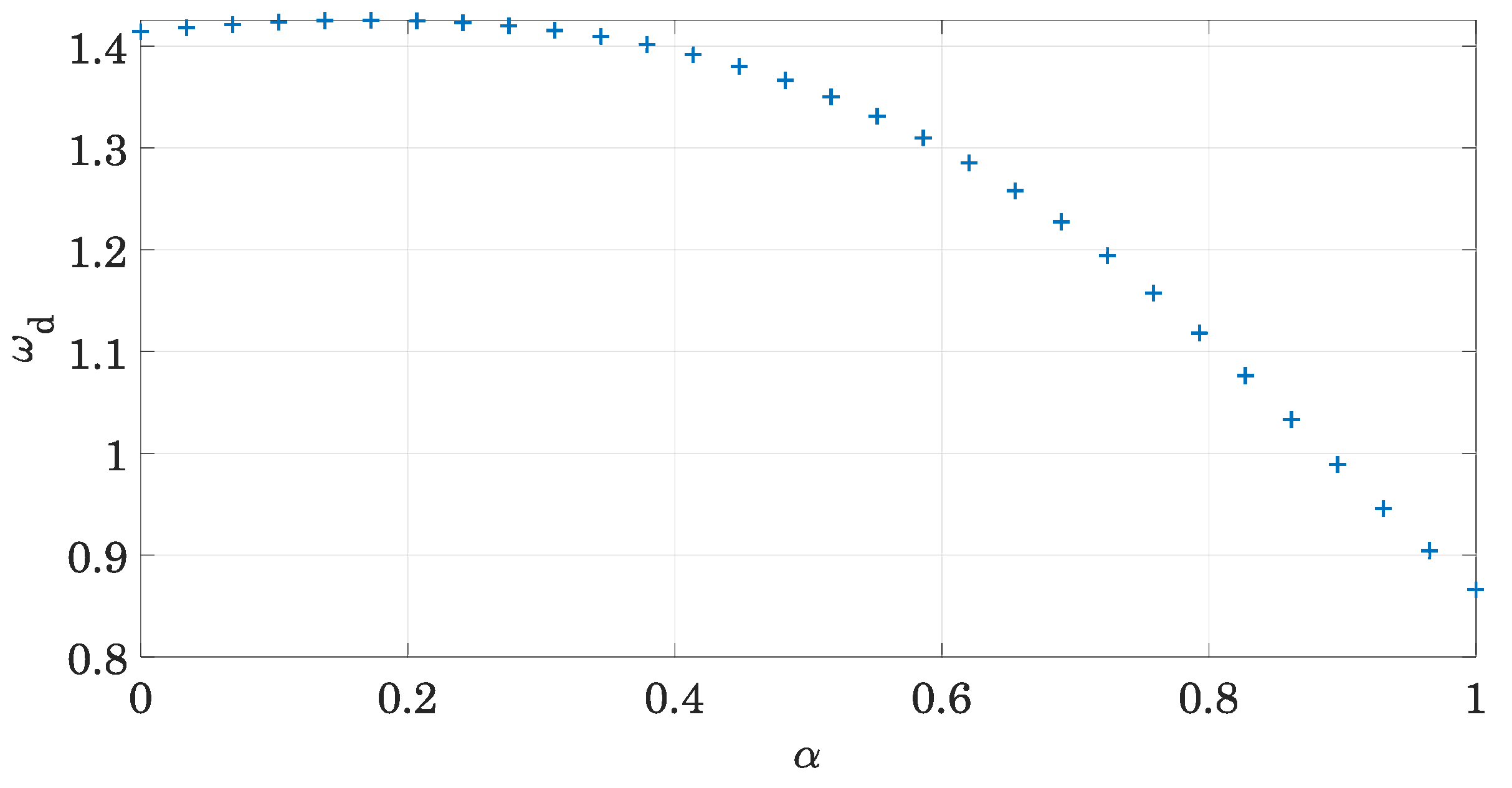
2.1. Poles of the System
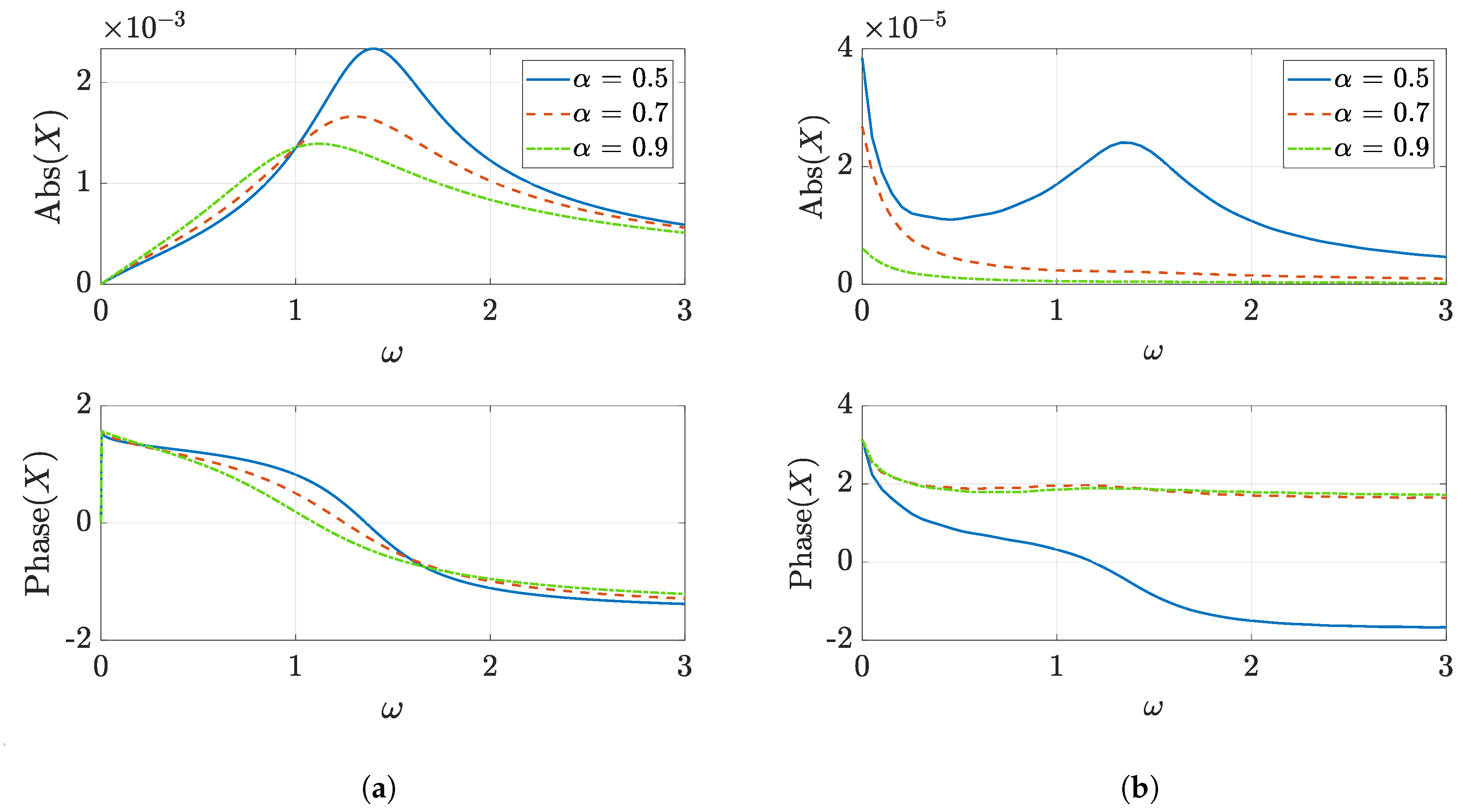
2.2. Dynamic Response
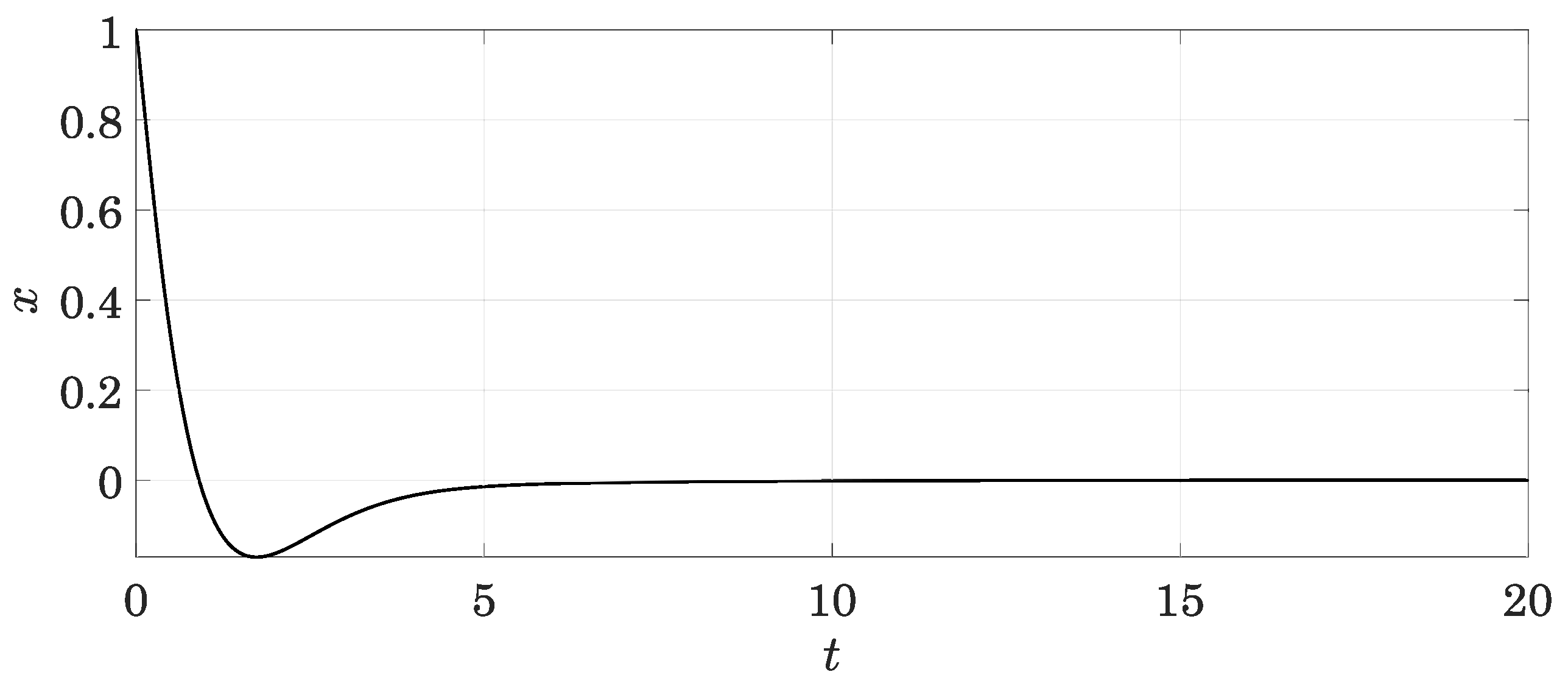
2.2.1. Response to Initial Conditions
2.2.2. Response to Impulse
2.2.3. Response to Step
3. Application: Bearing Support
3.1. Natural Frequencies and Mode Shapes
3.2. Dynamic Response
- Case 1: a viscous case ( 1) with low stiffness ( N/m) and low damping ( N s/m) that is used for reference, in which the rigid body movement prevails.
- Case 2: a viscous case ( 1) with low stiffness () and supercritical damping (), in which the shaft returns to the equilibrium position without oscillating.
- Case 3: a fractionally damped case ( 0.6) with low stiffness () and high damping () so that the system returns to its original position oscillating around a variable equilibrium position.
- Case 4: a fractionally damped case ( 0.6) with high stiffness () and low damping (), in which the movement is a combination of the rigid body motion and the first modes of the system.
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Adolfsson, K.; Enelund, M.; Olsson, P. On the fractional order model of viscoelasticity. Mech. Time Depend. Mater. 2005, 9, 15–34. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Spplications; Mathematics in Science and Engineering; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Torvik, P.J.; Bagley, R.L. On the Appearance of the Fractional Derivative in the Behavior of Real Materials. J. Appl. Mech. 1984, 51, 294–298. [Google Scholar] [CrossRef]
- Bagley, R.L.; Torvik, P.J. A theoretical basis for the application of fractional calculus to viscoelasticity. J. Rheol. 1983, 27, 201–210. [Google Scholar] [CrossRef]
- Di Paola, M.; Pirrotta, A.; Valenza, A. Visco-elastic behavior through fractional calculus: An easier method for best fitting experimental results. Mech. Mater. 2011, 43, 799–806. [Google Scholar] [CrossRef]
- Nutting, P.G. A new general law of deformation. J. Frankl. Inst. 1921, 191, 679–685. [Google Scholar] [CrossRef]
- Gemant, A. A method of analyzing experimental results obtained from elasto-viscous bodies. Physics 1936, 7, 311–317. [Google Scholar] [CrossRef]
- Pinnola, F.P.; Zavarise, G.; Prete, A.D.; Franchi, R. On the appearance of fractional operators in non-linear stress–strain relation of metals. Int. J. Non-Linear Mech. 2018, 105, 1–8. [Google Scholar] [CrossRef]
- Makris, N. Three-dimensional constitutive viscoelastic laws with fractional order time derivatives. J. Rheol. 1997, 41, 1007–1020. [Google Scholar] [CrossRef]
- Alotta, G.; Barrera, O.; Cocks, A.C.; Di Paola, M. On the behavior of a three-dimensional fractional viscoelastic constitutive model. Meccanica 2017, 52, 2127–2142. [Google Scholar] [CrossRef]
- Alotta, G.; Barrera, O.; Cocks, A.; Paola, M.D. The finite element implementation of 3D fractional viscoelastic constitutive models. Finite Elem. Anal. Des. 2018, 146, 28–41. [Google Scholar] [CrossRef]
- Heymans, N.; Podlubny, I. Physical interpretation of initial conditions for fractional differential equations with Riemann-Liouville fractional derivatives. Rheol. Acta 2006, 45, 765–771. [Google Scholar] [CrossRef]
- Di Paola, M.; Pinnola, F.P.; Zingales, M. A discrete mechanical model of fractional hereditary materials. Meccanica 2013, 48, 1573–1586. [Google Scholar] [CrossRef]
- Schiessel, H.; Metzler, R.; Blumen, A.; Nonnenmacher, T.F. Generalized viscoelastic models: their fractional equations with solutions. J. Phys. Math. Gen. 1995, 28, 6567. [Google Scholar] [CrossRef]
- Naber, M. Linear fractionally damped oscillator. Int. J. Differ. Equations 2010, 2010. [Google Scholar] [CrossRef]
- Achar, B.N.N.; Hanneken, J.W.; Enck, T.; Clarke, T. Dynamics of the fractional oscillator. Phys. Stat. Mech. Appl. 2001, 297, 361–367. [Google Scholar] [CrossRef]
- Achar, B.N.N.; Hanneken, J.W.; Clarke, T. Response characteristics of a fractional oscillator. Phys. Stat. Mech. Appl. 2002, 309, 275–288. [Google Scholar] [CrossRef]
- Achar, B.N.N.; Hanneken, J.W.; Clarke, T. Damping characteristics of a fractional oscillator. Phys. Stat. Mech. Appl. 2004, 339, 311–319. [Google Scholar] [CrossRef]
- Shokooh, A.; Suárez, L. A comparison of numerical methods applied to a fractional model of damping materials. J. Vib. Control. 1999, 5, 331–354. [Google Scholar] [CrossRef]
- Suarez, L.E.; Shokooh, A. An eigenvector expansion method for the solution of motion containing fractional derivatives. J. Appl. Mech. 1997, 64, 629–635. [Google Scholar] [CrossRef]
- Fenander, A. Modal synthesis when modeling damping by use of fractional derivatives. AIAA J. 1996, 34, 1051–1058. [Google Scholar] [CrossRef]
- Cortés, F.; Elejabarrieta, M.J. Finite element formulations for transient dynamic analysis in structural systems with viscoelastic treatments containing fractional derivative models. Int. J. Numer. Methods Eng. 2007, 69, 2173–2195. [Google Scholar] [CrossRef]
- Cortés, F.; Elejabarrieta, M.J. Homogenised finite element for transient dynamic analysis of unconstrained layer damping beams involving fractional derivative models. Comput. Mech. 2007, 40, 313–324. [Google Scholar] [CrossRef]
- Mendiguren, J.; Cortés, F.; Galdos, L. A generalised fractional derivative model to represent elastoplastic behaviour of metals. Int. J. Mech. Sci. 2012, 65, 12–17. [Google Scholar] [CrossRef]
- Oldham, K.; Spanier, J. The Fractional Calculus Theory and Applications of Differentiation and Integration to Arbitrary Order; Elsevier: Amsterdam, The Netherlands, 1974. [Google Scholar]
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; Wiley-Interscience: Hoboken, NJ, USA, 1993. [Google Scholar]
- Bagley, R.L.; Calico, R.A. Fractional order state equations for the control of viscoelasticallydamped structures. J. Guid. Control. Dyn. 1991, 14, 304–311. [Google Scholar] [CrossRef]
- Kilbas, A.A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science Limited: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Yuan, L.; Agrawal, O.P. A numerical scheme for dynamic systems containing fractional derivatives. Trans. Am. Soc. Mech. Eng. J. Vib. Acoust. 2002, 124, 321–324. [Google Scholar] [CrossRef]
- Pinnola, F.P. Statistical correlation of fractional oscillator response by complex spectral moments and state variable expansion. Commun. Nonlinear Sci. Numer. Simul. 2016, 39, 343–359. [Google Scholar] [CrossRef]
- Matsubara, M.; Rahnejat, H.; Gohar, R. Computational modelling of precision spindles supported by ball bearings. Int. J. Mach. Tools Manuf. 1988, 28, 429–442. [Google Scholar] [CrossRef]
- Cortés, F.; Elejabarrieta, M.J. Computational methods for complex eigenproblems in finite element analysis of structural systems with viscoelastic damping treatments. Comput. Methods Appl. Mech. Eng. 2006, 195, 6448–6462. [Google Scholar] [CrossRef]
- Cortés, F.; Elejabarrieta, M.J. An approximate numerical method for the complex eigenproblem in systems characterised by a structural damping matrix. J. Sound Vib. 2006, 296, 166–182. [Google Scholar] [CrossRef]
- Cortés, F.; Jesús Elejabarrieta, M. Finite element analysis of the seismic response of damped structural systems including fractional derivative models. J. Vib. Acoust. 2014, 136, 050901. [Google Scholar] [CrossRef]













© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zarraga, O.; Sarría, I.; García-Barruetabeña, J.; Cortés, F. An Analysis of the Dynamical Behaviour of Systems with Fractional Damping for Mechanical Engineering Applications. Symmetry 2019, 11, 1499. https://doi.org/10.3390/sym11121499
Zarraga O, Sarría I, García-Barruetabeña J, Cortés F. An Analysis of the Dynamical Behaviour of Systems with Fractional Damping for Mechanical Engineering Applications. Symmetry. 2019; 11(12):1499. https://doi.org/10.3390/sym11121499
Chicago/Turabian StyleZarraga, Ondiz, Imanol Sarría, Jon García-Barruetabeña, and Fernando Cortés. 2019. "An Analysis of the Dynamical Behaviour of Systems with Fractional Damping for Mechanical Engineering Applications" Symmetry 11, no. 12: 1499. https://doi.org/10.3390/sym11121499
APA StyleZarraga, O., Sarría, I., García-Barruetabeña, J., & Cortés, F. (2019). An Analysis of the Dynamical Behaviour of Systems with Fractional Damping for Mechanical Engineering Applications. Symmetry, 11(12), 1499. https://doi.org/10.3390/sym11121499