1. Introduction
Ad-hoc wireless sensor network (WSN) is a core technology of Internet of Things (IoT) with a wide range of applications including smart home networking and industrial internet of things (IIoT) [
1,
2]. In IoT environments, the WSNs have large area with many sensor nodes compared with conventional application specific sensor networks. We need more sophisticated energy-efficient routing protocols than conventional ones targeted for relatively small-area WSNs.
WSN is a collection of large numbers of sensor nodes deployed over a large area with a central base station (BS) that collects sensing data. Sensor nodes are characterized by limited sensing, computing and communication capabilities. Moreover, in WSN based IoT environments, several hundreds or thousands of sensor nodes are randomly deployed with limited battery power, which are difficult to be recharged. To overcome limitations from these characteristics, a great emphasis is placed on scalability and efficient energy consumption of WSN in every design aspects including routing protocols, network topology, security key management, etc.
Based on the deployment of nodes, routing protocols can be divided into two types: flat routing and hierarchical routing, which is also called cluster-based routing. In flat routing protocols, all sensor nodes play identical roles in conveying sensing data to the BS. Cluster-based or hierarchical routing protocols refer to routing protocols in which the nodes are grouped into clusters, where a cluster is composed of a cluster head (CH) and one or more member nodes. Cluster-based routing protocols take advantage of load balancing and reducing communication volume in a distributed manner to prolong the network lifespan of WSN. Low Energy Adaptive Clustering Hierarchy (LEACH) [
3] is a most widely adopted cluster-based routing protocol for WSN, by virtue of its simplicity and energy efficiency as a fully decentralized scheme.
There has been a lot of research work related to energy consumption in cluster-based routing protocols. In single hop communication, the CH collects data from its member nodes and directly sends these data to the BS, as in LEACH [
3]. If the network area is small, then the entire sensor field can be covered by the transmission range of any node in the field, and single hop protocols are advantageous due to minimum overhead and minimum delay. However, cluster-based routing protocols with single hop protocols [
4,
5,
6,
7,
8,
9] are not suitable for IoT environments based on large-area WNS, due to their short lifespan.
Multi-hop communication is more energy efficient approach to routing protocols for large-area sensor networks. In multi-hop cluster-based routing protocols, the CH sends its data via some intermediate nodes to the BS, if necessary. In LEACH-D protocol [
10], connectivity density factor and energy factor are considered in computing the threshold value for the CH selection phase. Although it shows improvement in terms of scalability and energy consumption, it still has hotspot problem with difference in cluster sizes. This hotspot problem is addressed in FZ-LEACH protocol [
11] to enhance the lifespan of the network. However, the main drawback of FZ-LEACH is non-optimality in the selection of zone heads. This drawback is improved in IFZ-LEACH [
12], in which CH divides the sensor field intofar zone and non-far zone to select the zone head from the far zone based on maximum residual energy. However, it suffers from scalability and network complexity. In DL-LEACH [
13], the network is divided into several layers and the nodes in lower layers make distance-base determine whether they are to transmit data via CHs or to send data to the BS directly. It has achieved a good improvement in energy consumption with moderate-size sensor networks. However, it suffers from short node lifespan in large-scale or large-area networks. In CL-LEACH [
14], the node with residual energy greater than the threshold value performs the tasks of a relay node for multi-hop communication. Broken links are detected by route maintenance and substituted by some new paths in the existing route. The main drawbacks of this protocol are message overheads and complexity. In P-LEACH [
15], a mobile base station (BS) is considered instead of a fixed BS. It uses a cluster-based prediction by activating a small number of nodes during the tracking of the mobile BS in the field, which is divided into three regions: partition cluster, communication quadrangle, and four-partition-cluster structure.
Aside from data routing protocol issues, the authors of [
16] presented a survey on cluster-based group key agreement (GKA) protocols for WSN security issues, and assessed and measured the efficiency of each GKA protocol in terms of its energy consumption.
Cluster-based routing protocols divide the sensor nodes into an average of
k clusters. In conventional WSN, we used the parameter
k as a sub-optimized fixed value by rule of thumb, which worked well enough with small-area sensor networks. In large-area WSNs,
k needs to be optimized with increased number of sensor nodes. Decentralized cluster-based routing protocols use control messages for cluster head advertisement, join request, message transmission scheduling, etc. In LEACH algorithm [
17] and most of its variants, nodes send control messages with maximum power to reach the entire network to ensure that the messages can be received by nodes farthest away in the sensor field. Using this non-optimized max-distance transmission range of
R for the control messages, together with another sub-optimized fixed value of
k, is one of the main causes of limited improvements in lifespan of large area sensor network in IoT [
18,
19].
Referring to a survey paper over a hundred of cluster-based routing protocols [
20], we found some approaches [
21,
22] to optimization of
k, without compromising decentralized-clustering features. In [
21], the authors investigated the optimization of
k using a genetic algorithm, in which, however, the improvement significantly degraded by increasing the size of sensor field from 50 m to 100 m, which are still not big enough to be applied in IoT. In [
22], uneven probabilities are applied to the election of CH nodes, while using suboptimal
k determined by rule of thumb. In general, we could hardly find cluster-based routing protocols with optimization of
R, the transmission range for control messages, or with joint optimization of
. In this paper, we investigate a joint optimization of
by in-depth analyses of energy consumption during clustering processes and data transmission in sensor nodes.
Table 1 is a list of symbols and notations used in this paper.
3. Energy Consumption Analysis
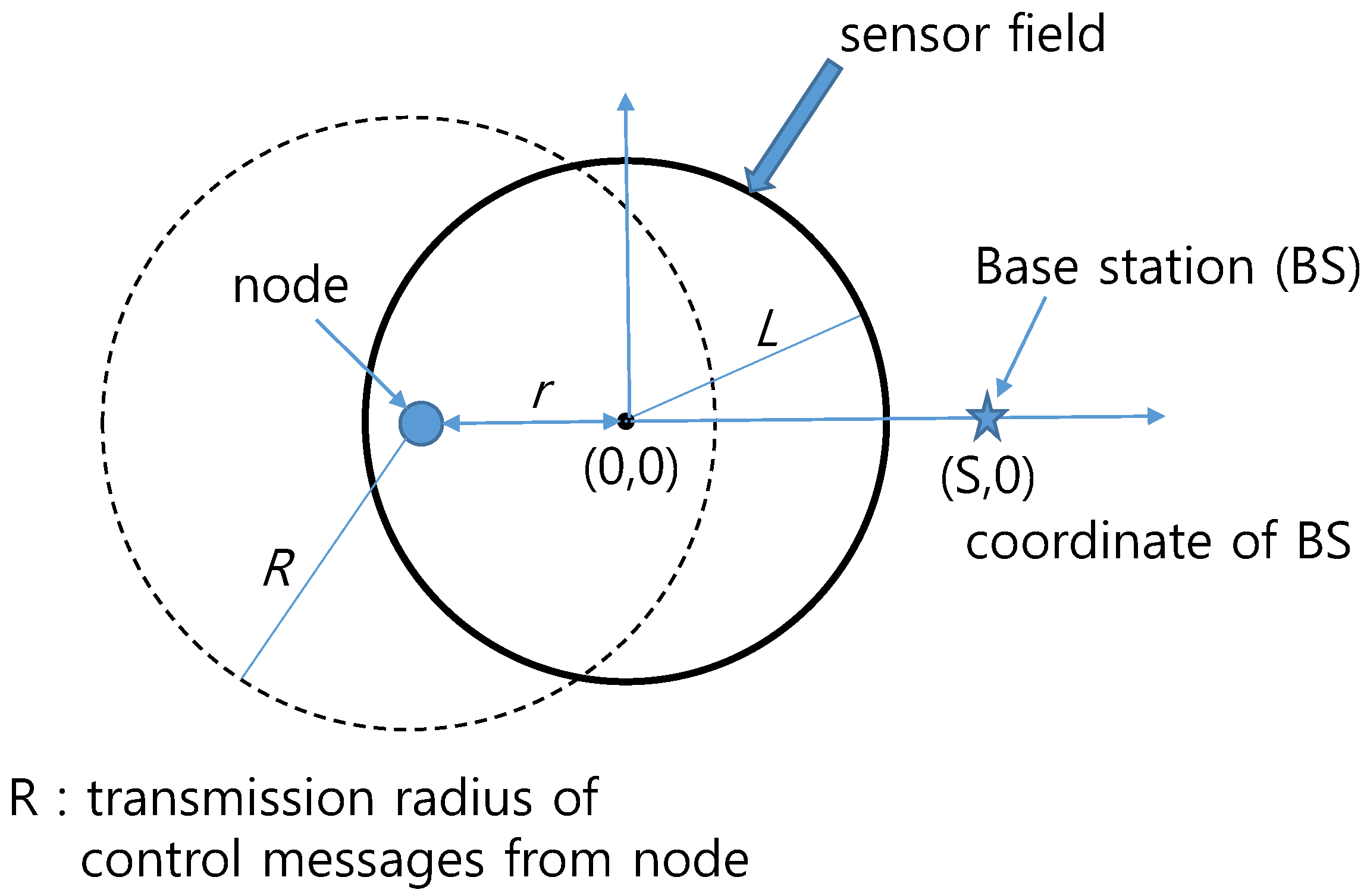
Consider the circular-shaped sensor field with radius of
L (m) in
Figure 1. The center of the sensor field is the origin (0, 0) of the coordinate system. Let
S denote distance of BS from the center of the sensor field. The base station (BS) is considered to be at the border or outside of the sensor field at coordinate (
S, 0). Within the sensor field, we have a node at
r (
) (m) away from the origin (0, 0). Each node has transmission radius
R (
) for control messages including ADV, Join-REQ, and TDMA messages.
Consider a node marked at
r (
) (m) away from the origin in
Figure 1. Using a dashed circle, we show the transmission radius
R (m) of control messages for the marked node. Inside of the sensor field, the area covered by the transmission range of the marked node is called
effective area of the marked node. In the case of
, the marked node is close to the center of the sensor field. In this case, the transmission range depicted by the dashed circle includes the entire sensor field as in
Figure 2a; and the effective area of the marked node is exactly the same as the entire sensor field. However, in the case of
, the sensor field is covered in part by the transmission range of the marked node as in
Figure 2b, and the effective area of the node is the intersection of the two partially overlapping circles.
By assuming symmetrical propagation channel between any two nodes, a node can hear ADV messages from other nodes which only reside in its
effective area. The effective area
of a node at
r (m)
away from the origin, with transmission range
R, is calculated by (see
Appendix A for its derivation)
where
is the intersection area of the two partially overlapped circles. The expectation,
, of the effective area is given by (see
Appendix B for its derivation)
It is noted that Equation (
5) is calculated by taking into account both the total inclusion and partial overlap cases to obtain the expectation of transmission range of an arbitrary node.
Given
k and
R, we consider the probability that a node hears ADV messages from
n CHs as the probability that a node has
n CHs in its effective area. We model this probability as the spatial Poisson process, which is a stationary two-dimensional Poisson point process successfully adopted in modeling wireless sensor networks [
23,
24,
25]:
where the density, the number of sensor nodes per unit area,
is the average number of CHs within unit area. A node can join a cluster if it has heard from one of more CHs. Therefore, the probability that a node fails to join a cluster for the current round is given by the probability of hearing zero ADV message:
The length of ADV, Join-REQ, TDMA, and DATA messages are denoted by
,
,
, and
, respectively (in bits). Among them, lengths
,
, and
are fixed. However, the length of a TDMA schedule message,
, depends on the number of member nodes in the current cluster, and the number of members, again, depends on
. The expected number of non-CH nodes which successfully join clusters is
which, after dividing by
k, gives the expected number of member nodes in a cluster. We have
where 16 is assumed to be the number of bits to represent each node ID. In the following subsections, we analyze the overall amounts of energy that are expended by the nodes in a round as a function of
k and
R.
3.1. Energy Dissipation by Non-CH Nodes
In this subsection, we analyze the expected amount of energy consumed by non-CH nodes in a round. First, consider sending Join-REQ messages with transmission radius of
R. Since we have
and assume
the expectation of energy dissipation
by a non-CH node sending a Join-REQ message is given by
Modeling each of
k clusters as a circle with the expectation of radius,
, we calculate the area of each cluster as
from which
If we have
then
and vice versa. Let
denote the distance from a member node to its CH. The expected amount of energy
consumed by a member node while sending a DATA message to its CH is calculated by
where, using Equation (
10),
and
We assume that the base station (BS) resides at coordinate
where
. A non-CH node, failing to join a cluster, sends a DATA message to the BS directly, consuming the amount of energy
. Let
denote the distance from a node to the BS. With large fields,
will be dominated by nodes with
, as follows.
where
The expectation of the number of CHs seen by a non-CH node is
The energy
consumed by a non-CH node while receiving ADV messages is
A non-CH node receives a TDMA scheduling message from its CH by expending energy
:
where
is given in Equation (
8).
Consequently, the expectation of total energy expended by all non-CH nodes in a round is given by
3.2. Energy Dissipation by CH Nodes
We now analyze the expected amount of energy expended by CH nodes in a round. First, consider sending ADV and TDMA messages with transmission radius of
R. Average amount of energy consumption by a CH node while transmitting ADV and TDMA messages are
and
respectively.
The average number of member nodes of a CH is
. The expected data-aggregation energy by a CH node is
A CH node sends aggregated data to the BS by expending
where
is calculated as in Equation (
13).
In LEACH-based clustering protocol, a CH node receives other CHs’ ADV messages, although they are just dumped; we ignore the energy related to this step. A CH node will hear Join-REQ messages from all non-CH nodes in its control-message range, to check if they are destined for itself or not. Therefore, while a CH node receives Join-REQ messages, it consumes
:
A CH requires energy
during receiving DATA from its member nodes as follows:
Consequently, the expectation of the total energy expended among all CH nodes in a round is given by
Finally, the expected amount of energy consumption in a round is
4. Optimization of
Our goal is to find the optimized
and
to minimize
as in:
We note that
can be calculated as a real number, which can be readily applied to the LEACH algorithm by using rounding off form
for the place of
in the cluster-selection probability (Equation (
3)).
Although
is high-order differentiable, getting gradients or Hessian matrix is expensive and complicated. Since
is observed to have convex-downward shape, as shown by the simulation presented below, we choose Nelder–Mead (N-M) Simplex algorithm [
26,
27], as a derivative-free optimization method. We suggest constructing the initial simplex as the following three vertices,
,
, and
:
where
and
are 5% value of
and
, respectively. In the first simplex
,
k is chosen to be 5 and
R is taken as the mid-point of interval
. Large-area sensor networks with large number of sensor nodes often show the optimum values of
, which are greater than
by conventional rule of thumb. Therefore, we suggest that both the second simplex
and the third,
, have
, instead of using conventional initialization with
for
and,
for
.
The N-M optimization algorithm starts with the three vertices
,
, and
. The function
takes on values
,
, and
. The function values are to be compared to determine the best vertex, second best vertex, and the worst vertex. For N-M simplex transformations, we have used the standard values, 1, 1/2, 1, and 1/2 for the reflection, expansion, contraction, and shrink transformation, respectively. According to the N-M implementation in [
27], we iteratively continue the ordering, centroid, and transformation steps of N-M algorithm with given termination tests to obtain the optimization value of
.
It is noted that the computational procedure for our proposed optimization described in this paper is not carried out by the sensor nodes, but is carried out at the base station (BS) and/or at the management center, which are assumed to have enough computational capabilities being supplied with sufficient power. The optimized parameters calculated at the management center can be implemented as a design parameter during the firmware installation for sensor nodes. The optimized parameters calculated at the BS can be broadcast to the sensor nodes deployed in the field through the wireless channel.
5. Performance Evaluation
In the performance evaluation, we used the lengths of messages as in the LEACH code [
17]:
,
, and
(bits). We considered
or
. We carried extensive simulations with large sizes of sensor fields,
, compared with the typical size of 100 m considered in most existing WSN routing protocols [
3,
18,
19,
20,
21]. The unit of
L and
R is meters. We assumed
, i.e., the BS is on the boundary of the field.
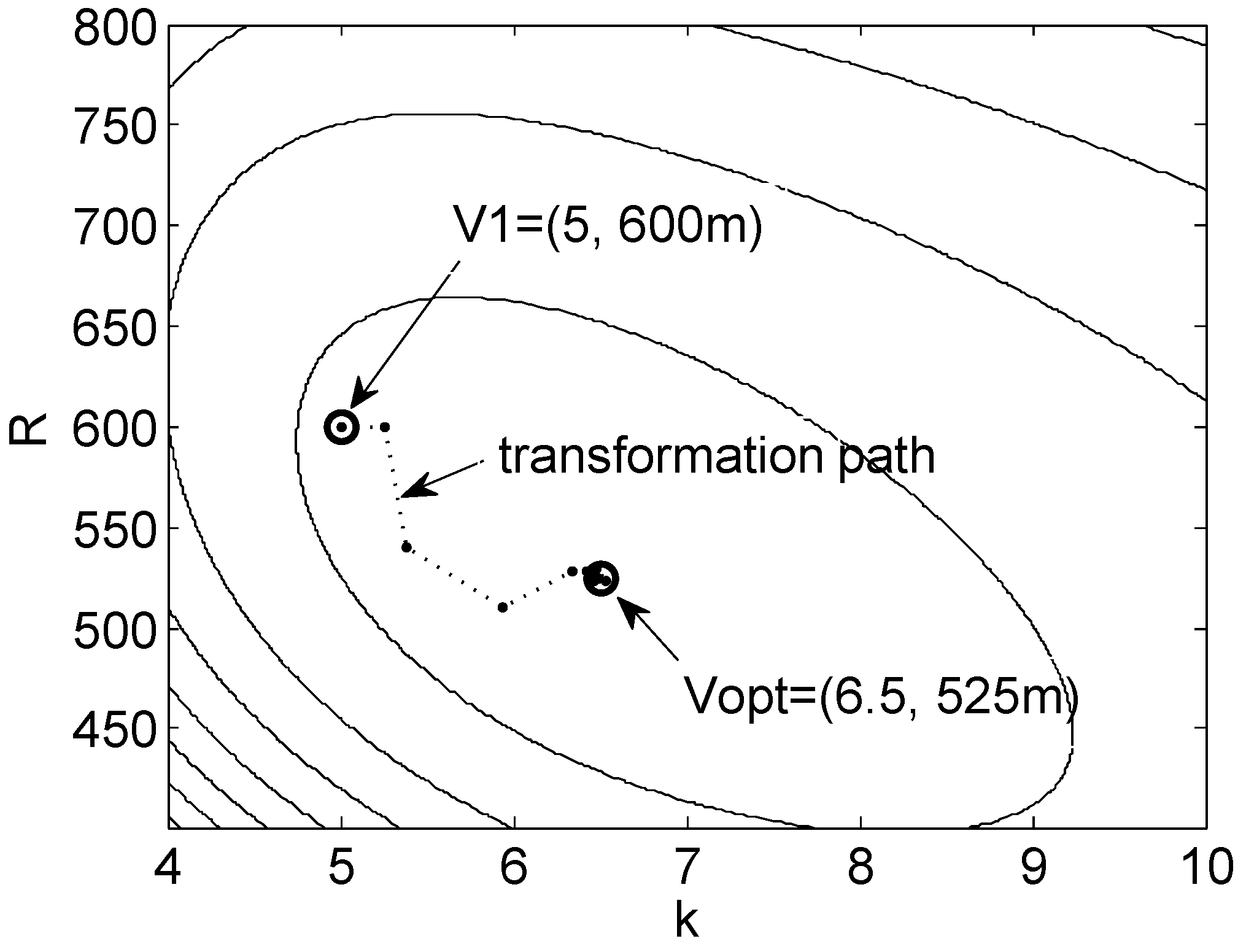
With our derived energy function
, Nelder–Mead Simplex algorithm converged in an average of 50 iterations taking around 50 ms on a CPU running at 3.10 GHz. In
Figure 3, we show a contour plot of
with
and
. We also show the locations of initial simplex
and the final optimized simplex
after 54 iterations. The marks connected with dotted lines between
and
show the path of simplex transformations from the iterations of N-M optimization. A closer investigation on the convergence behavior of the N-M optimization process is shown in
Appendix C. We observed that the iterations have 3 expansions, 9 reflections, 6 outside-contractions, and 36 inside-contractions out of a total of 54 transformations. Overall, 66% of transformations are inside-contractions, which means the energy function
has a very good shape for optimization.
We evaluated our proposed optimization by simulation with the LEACH code [
17] from the originator, which runs on NS2 and has been verified in the literature, to obtain higher level of objectivity of our simulation results. For each scenario, we ran 100 simulations with different seed numbers to obtain narrow confidence intervals.
In
Table 2, we compare average energy consumption per node in a round with measure (mJ/node/round), between the original LEACH [
3] and the LEACH with our optimization. Each value was obtained from several hundreds of rounds with all
N nodes alive in the cluster-based routing algorithms. The larger are
N and
L, the higher is the percentage of energy savings. We also show the optimized parameters
in the table as compared with the fixed values of
in the existing LEACH-based algorithms. It was observed that the optimum number
k of clusters is dominated by
N. On the other hand,
R is mainly affected by the size,
L, of sensor field.
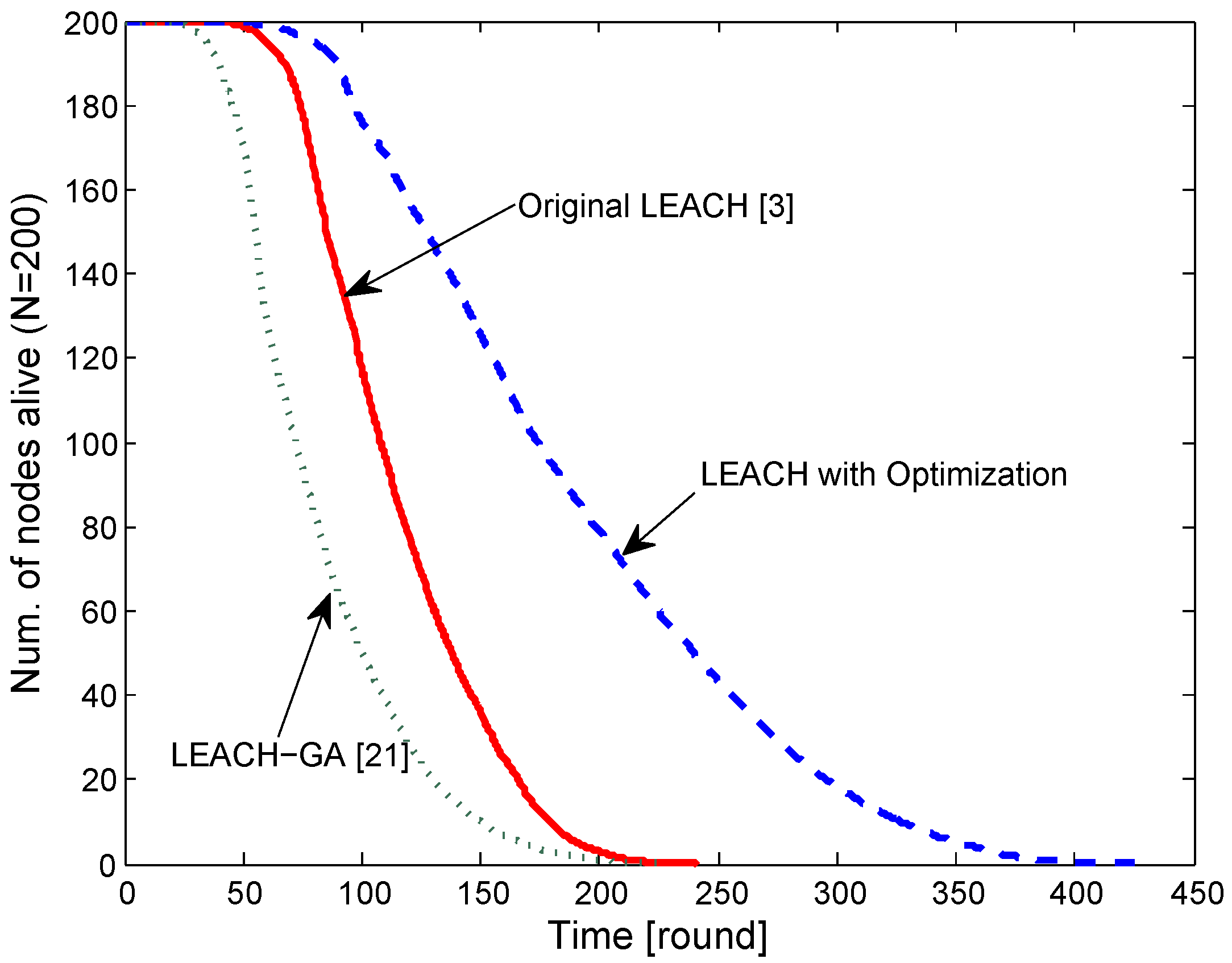
Figure 4 shows simulation results with
and
. Every node had an initial energy of 10 (J). The original LEACH [
3] takes
by rule of thumb, and
to make sure that the entire sensor field is covered by any sensor node. In the figure, we show the number of nodes alive over simulation time in rounds. In the original LEACH [
3], the average node lifespan is 110 rounds. Our proposed optimization, shown as “LEACH with Optimization”, takes
and
and outperforms the original, non-optimized LEACH [
3] with an average node lifespan of 178 rounds, which is an increment of 62%. A genetic algorithm based optimization, LEACH-GA [
21], does not take into account the energy dissipation for control messages, and yields an optimized value of
, which resulted in quick energy depletion in our simulation environment with large area sensor field.
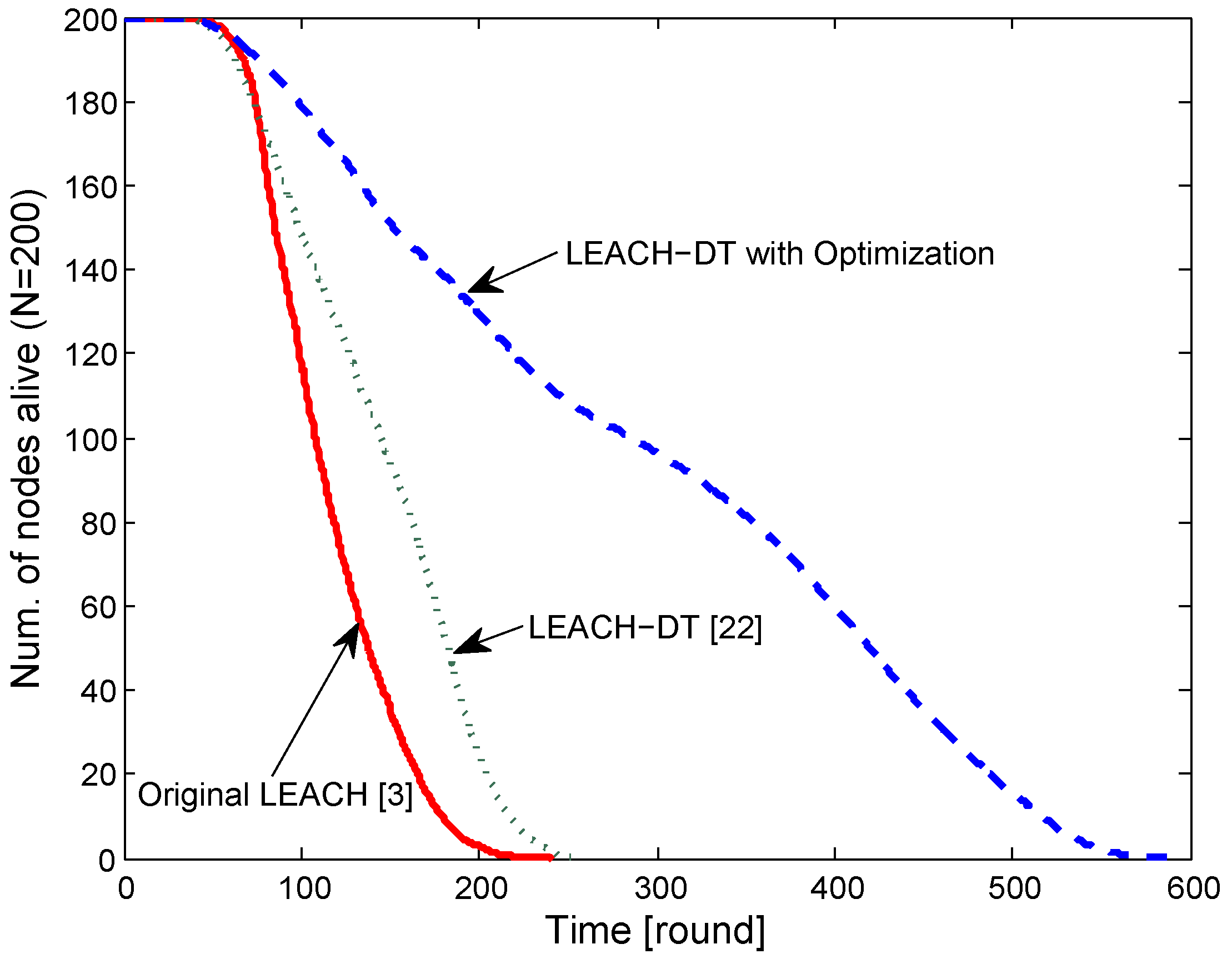
In
Figure 5, we show how much our optimization improves another LEACH-based algorithm, LEACH-DT [
22], which applies uneven probabilities to nodes in CH selection depending on the distance to the BS. LEACH-DT [
22] uses the same parameters
and
(m) as in the original LEACH. LEACH-DT itself outperforms the original LEACH, as shown in the figure. We could further improve LEACH-DT by running it with our optimized parameters
and
, i.e., we used uneven CH-selection probabilities while keeping the average of 6.5 CHs in each round and setting the transmission radius for control messages to be 525 m. This improved LEACH-DT significantly, as shown in the curve “LEACH-DT with Optimization”.
In
Table 3, we compare performance in terms of time to percentage-node-death in rounds among the schemes compared in
Figure 5. Our proposed optimization improved the network lifespan in terms of all criteria, 1–90%, in the table. We note that our optimization helps LEACH and LEACH-DT improve energy efficiency by increasing the lifespan dramatically with optimization. Consequently, our proposed optimization is expected to help existing cluster-based routing protocols to further improve in terms of network lifespan.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




