

Street View-Enabled Explainable Machine Learning for Spatial Optimization of Non-Motorized Transportation-Oriented Urban Design



Abstract
1. Introduction
2. Data and Methods
2.1. Study Area
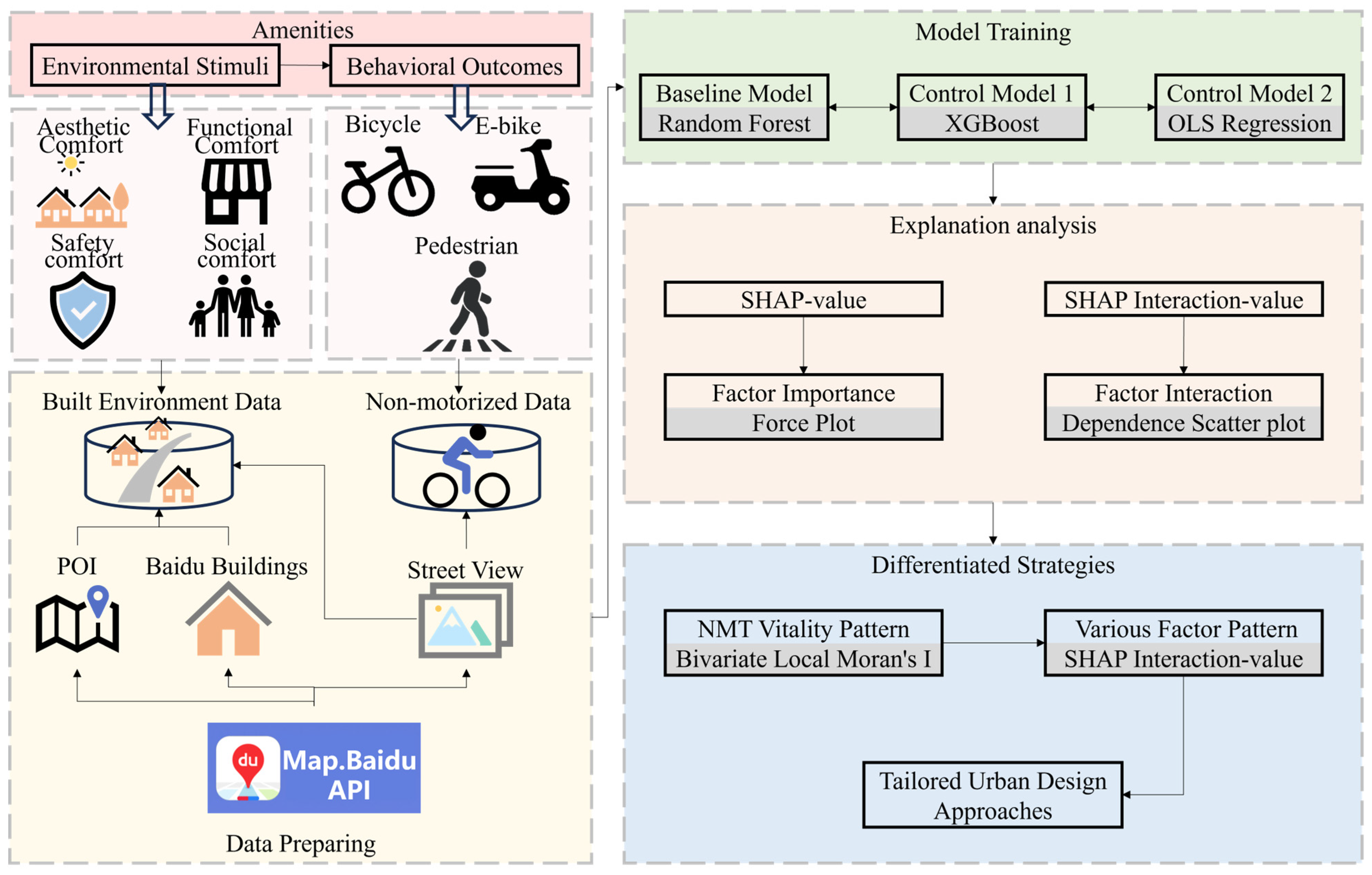
2.2. Research Framework
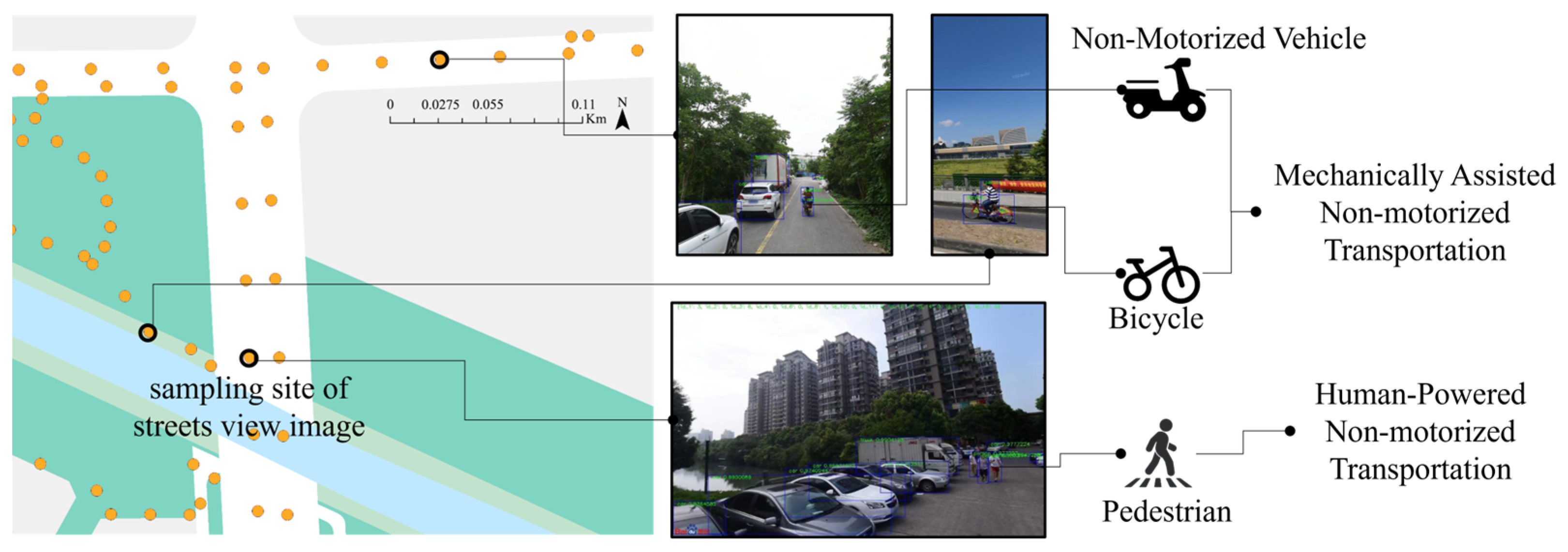
2.3. Object Detection for Non-Motorized Transportation via Street View Images
2.4. Quantifying the Nonlinear Influences of the Built Environment
2.4.1. Built Environment Factors
2.4.2. Regression Model Construction
2.4.3. Nonlinear Influences Interpretation
3. Results
3.1. NMT Target Objects and BE Factors in the Study Area
3.2. Regression Model Optimization and Comparative Analysis
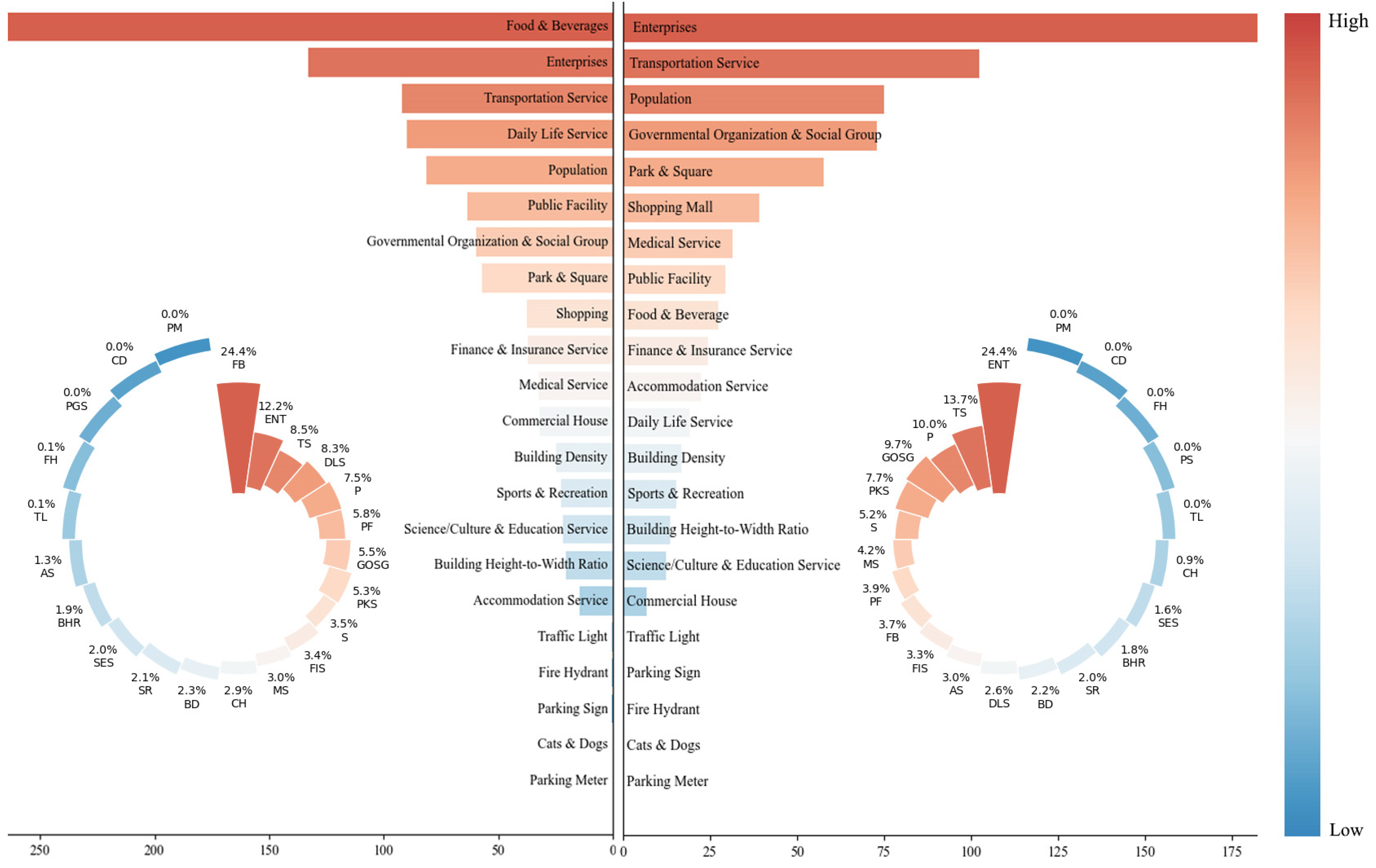
3.3. Influence of BE Factors on NMT Vitality
3.4. Interaction of BE Factors for NMT Vitality
4. Discussion
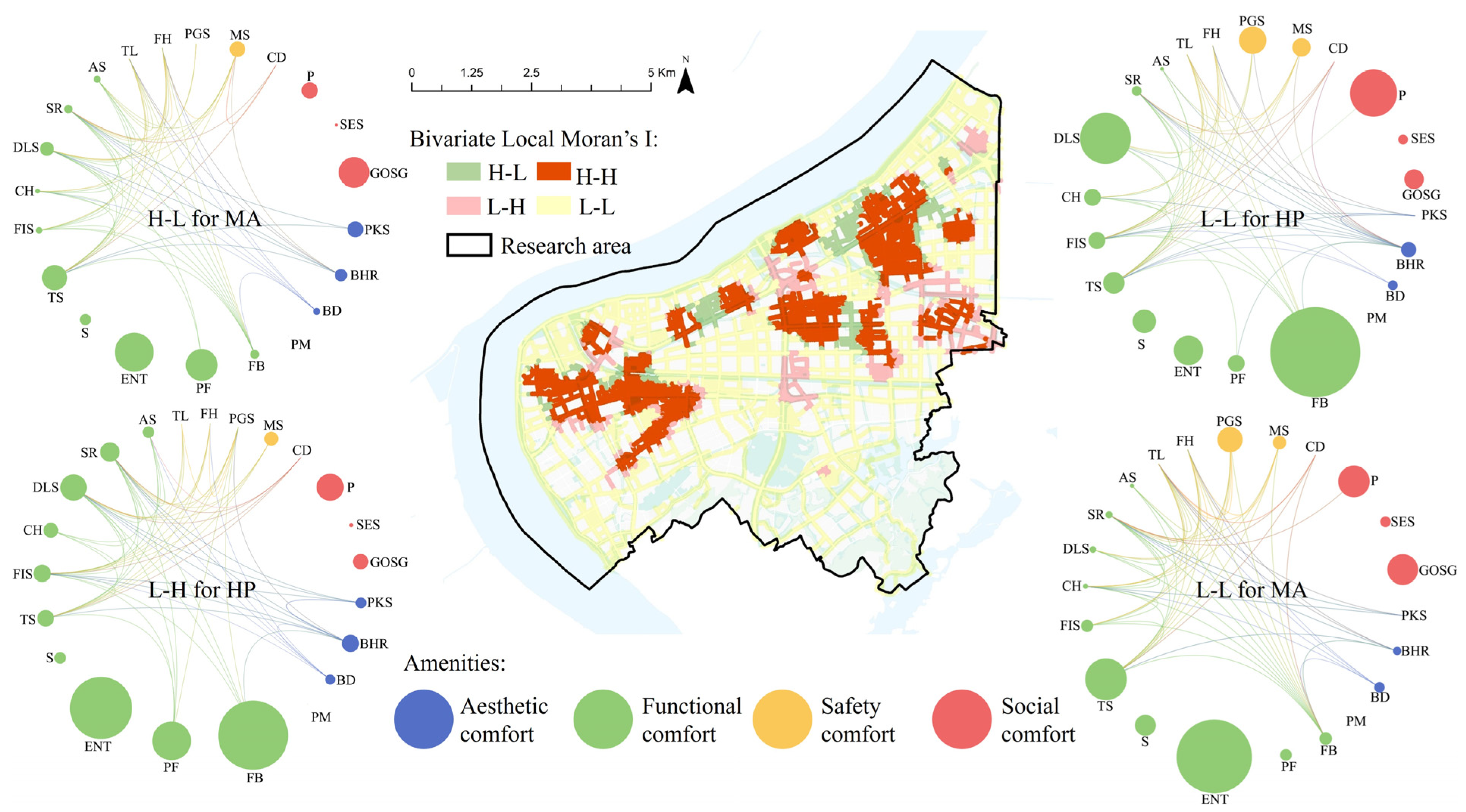
4.1. Bivariate Local Moran’s I and Strategies
4.1.1. H-L Clusters
4.1.2. L-H Clusters
4.1.3. L-L Clusters
4.2. Nonlinear Relationships Between BE Factors and NMT Vitality
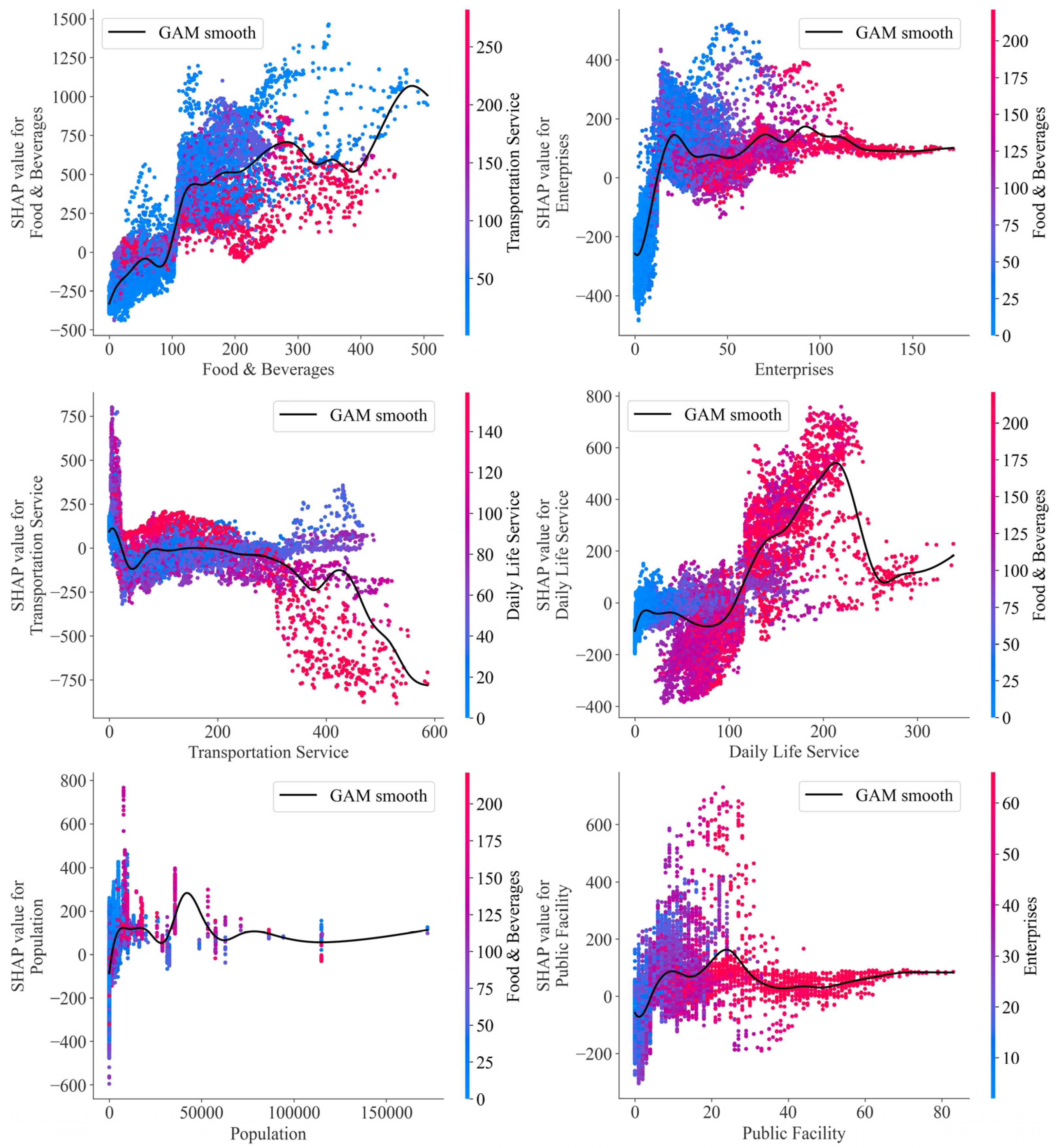
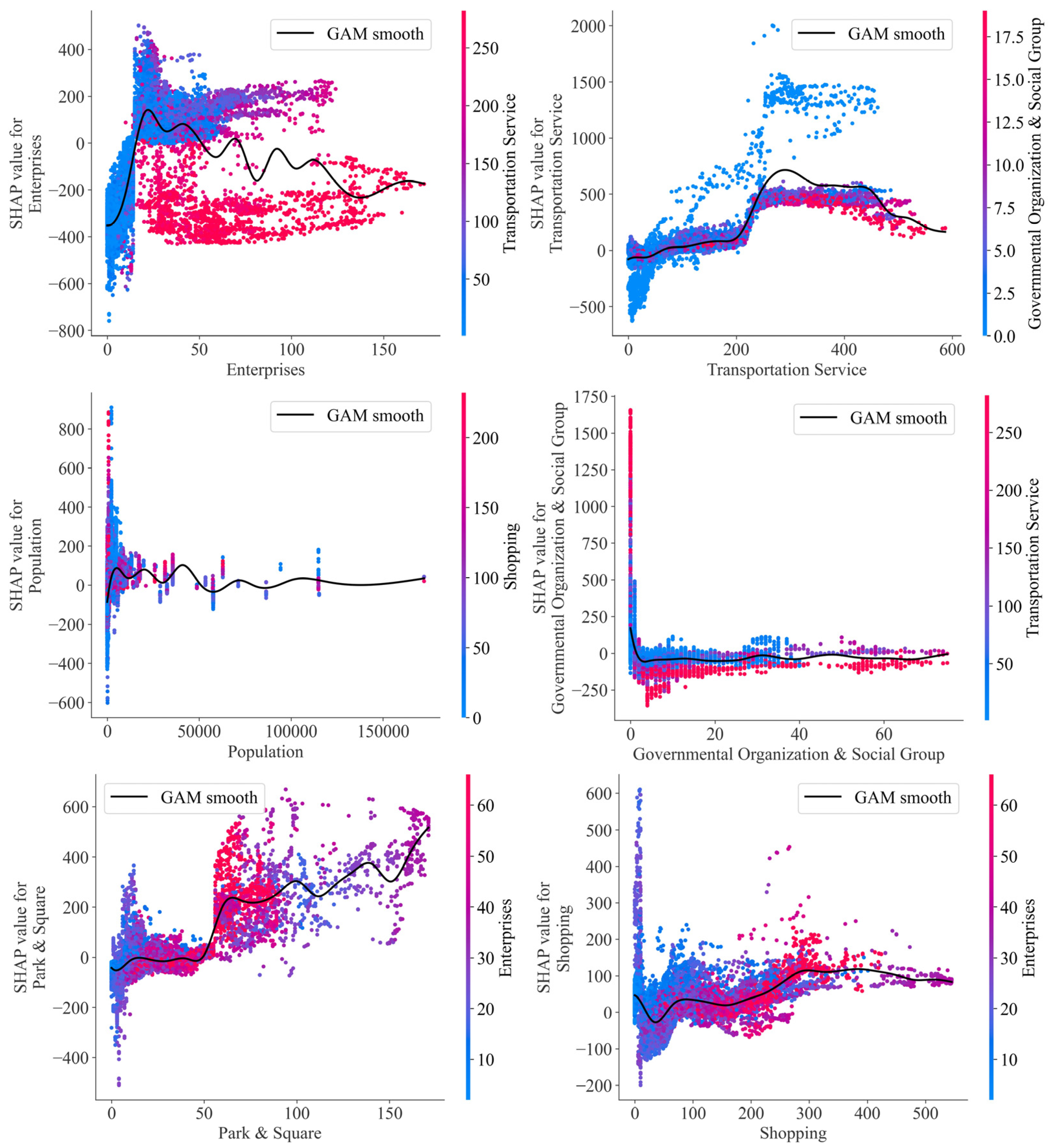
4.2.1. Threshold Effects
4.2.2. Synergistic Effects
4.2.3. Spatial Clustering Effects
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
| 1 | The threshold of 100 stores per analysis unit corresponds to ≈2 stores per hectare (stores/ha), calculated based on the standard area of the analysis unit (4002π m2 ≈ 0.0503 ha). Subsequent references to facility density will report values exclusively in stores/ha. |
References
- Balsas, C. Blending Individual Tenacity with Government’s Responsibility in the Implementation of US Non-Motorized Transportation Planning (NMT). Plan. Pract. Res. 2017, 32, 197–211. [Google Scholar] [CrossRef]
- Mansoor, U.; Kashifi, M.T.; Safi, F.R.; Rahman, S.M. A Review of Factors and Benefits of Non-Motorized Transport: A Way Forward for Developing Countries. Environ. Dev. Sustain. 2022, 24, 1560–1582. [Google Scholar] [CrossRef]
- Næss, P. Built Environment, Causality and Travel. Transp. Rev. 2015, 35, 275–291. [Google Scholar] [CrossRef]
- Nag, D.; Sen, J.; Goswami, A.K. Measuring Connectivity of Pedestrian Street Networks in the Built Environment for Walking: A Space-Syntax Approach. Transp. Dev. Econ. 2022, 8, 34. [Google Scholar] [CrossRef]
- Miranda-Moreno, L.F.; Morency, P.; El-Geneidy, A.M. The Link between Built Environment, Pedestrian Activity and Pedestrian–Vehicle Collision Occurrence at Signalized Intersections. Accid. Anal. Prev. 2011, 43, 1624–1634. [Google Scholar] [CrossRef] [PubMed]
- Mirzakhani, A.; Behzadfar, M.; Turró, M. Pedestrian Movement Patterns in Historical Urban Fabrics. GeoJournal 2023, 88, 6483–6506. [Google Scholar] [CrossRef]
- Cao, X. (Jason); Mokhtarian, P.L.; Handy, S.L. The Relationship between the Built Environment and Nonwork Travel: A Case Study of Northern California. Transp. Res. Part A Policy Pract. 2009, 43, 548–559. [Google Scholar] [CrossRef]
- Liu, C.; Shen, Q. An Empirical Analysis of the Influence of Urban Form on Household Travel and Energy Consumption. Comput. Environ. Urban Syst. 2011, 35, 347–357. [Google Scholar] [CrossRef]
- Ewing, R.; Cervero, R. Travel and the Built Environment: A Meta-Analysis. J. Am. Plan. Assoc. 2010, 76, 265–294. [Google Scholar] [CrossRef]
- Lanzini, P.; Stocchetti, A. From Techno-Centrism to Socio-Centrism: The Evolution of Principles for Urban Sustainable Mobility. Int. J. Sustain. Transp. 2021, 15, 815–825. [Google Scholar] [CrossRef]
- Rahul, T.M.; Verma, A. Study of Impact of Various Influencing Factors on NMT Mode Choice. Procedia—Soc. Behav. Sci. 2013, 104, 1112–1119. [Google Scholar] [CrossRef]
- Bautista-Hernández, D.A. Mode Choice in Commuting and the Built Environment in México City. Is There a Chance for Non-Motorized Travel? J. Transp. Geogr. 2021, 92, 103024. [Google Scholar] [CrossRef]
- Gehrke, S.R.; Wang, L. Operationalizing the Neighborhood Effects of the Built Environment on Travel Behavior. J. Transp. Geogr. 2020, 82, 102561. [Google Scholar] [CrossRef]
- Khan, M.; Kockelman, K.M.; Xiong, X. Models for Anticipating Non-Motorized Travel Choices, and the Role of the Built Environment. Transp. Policy 2014, 35, 117–126. [Google Scholar] [CrossRef]
- Basu, N.; Oviedo-Trespalacios, O.; King, M.; Kamruzzaman, M.; Haque, M.M. The Influence of the Built Environment on Pedestrians’ Perceptions of Attractiveness, Safety and Security. Transp. Res. Part F Traffic Psychol. Behav. 2022, 87, 203–218. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Lin, J.-J. The Associations of Built Environments with Public Bike Use for Metro Commuters. Transp. Plan. Technol. 2024, 47, 903–921. [Google Scholar] [CrossRef]
- Zhang, Y.; Thomas, T.; Brussel, M.; van Maarseveen, M. Exploring the Impact of Built Environment Factors on the Use of Public Bikes at Bike Stations: Case Study in Zhongshan, China. J. Transp. Geogr. 2017, 58, 59–70. [Google Scholar] [CrossRef]
- Hu, Y.; Sobhani, A.; Ettema, D. To E-Bike or Not to e-Bike? A Study of the Impact of the Built Environment on Commute Mode Choice in Small Chinese City. JTLU 2021, 14, 479–497. [Google Scholar] [CrossRef]
- Yu, Y.; Jiang, Y.; Qiu, N.; Guo, H.; Han, X.; Guo, Y. Exploring Built Environment Factors on E-Bike Travel Behavior in Urban China: A Case Study of Jinan. Front. Public Health 2022, 10, 1013421. [Google Scholar] [CrossRef]
- Hankey, S.; Zhang, W.; Le, H.T.K.; Hystad, P.; James, P. Predicting Bicycling and Walking Traffic Using Street View Imagery and Destination Data. Transp. Res. Part D Transp. Environ. 2021, 90, 102651. [Google Scholar] [CrossRef]
- Larkin, A.; Hystad, P. Evaluating Street View Exposure Measures of Visible Green Space for Health Research. J. Expo. Sci. Environ. Epidemiol. 2019, 29, 447–456. [Google Scholar] [CrossRef] [PubMed]
- Ito, K.; Bansal, P.; Biljecki, F. Examining the Causal Impacts of the Built Environment on Cycling Activities Using Time-Series Street View Imagery. Transp. Res. Part A Policy Pract. 2024, 190, 104286. [Google Scholar] [CrossRef]
- Ito, K.; Zhu, Y.; Abdelrahman, M.; Liang, X.; Fan, Z.; Hou, Y.; Zhao, T.; Ma, R.; Fujiwara, K.; Ouyang, J.; et al. ZenSVI: An Open-Source Software for the Integrated Acquisition, Processing and Analysis of Street View Imagery towards Scalable Urban Science. Comput. Environ. Urban Syst. 2025, 119, 102283. [Google Scholar] [CrossRef]
- Barbierato, E.; Bernetti, I.; Capecchi, I.; Saragosa, C. Integrating Remote Sensing and Street View Images to Quantify Urban Forest Ecosystem Services. Remote Sens. 2020, 12, 329. [Google Scholar] [CrossRef]
- Yue, H.; Xie, H.; Liu, L.; Chen, J. Detecting People on the Street and the Streetscape Physical Environment from Baidu Street View Images and Their Effects on Community-Level Street Crime in a Chinese City. IJGI 2022, 11, 151. [Google Scholar] [CrossRef]
- Wu, F.; Li, W.; Qiu, W. Examining Non-Linear Relationship between Streetscape Features and Propensity of Walking to School in Hong Kong Using Machine Learning Techniques. J. Transp. Geogr. 2023, 113, 103698. [Google Scholar] [CrossRef]
- Lei, Y.; Peng, D.; Zhang, P.; Ke, Q.; Li, H. Hierarchical Paired Channel Fusion Network for Street Scene Change Detection. IEEE Trans. Image Process. 2021, 30, 55–67. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, S.; Wang, X.; Huang, X.; Li, X.; Zhang, X.; Li, Z. Dynamic Visual Landscape Assessment of Disused Railway in Complex Terrain: A Study of Jingmen Railway. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 10877–10892. [Google Scholar] [CrossRef]
- Liu, C.; Huang, H.; Melack, J.M.; Tian, Y.; Jiang, J.; Fu, X.; Cao, Z.; Wang, S. Assessing Land Degradation and Restoration in Eastern China Grasslands from 1985 to 2018 Using Multitemporal Landsat Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 19328–19342. [Google Scholar] [CrossRef]
- Wu, C.; Kim, I.; Chung, H. The Effects of Built Environment Spatial Variation on Bike-Sharing Usage: A Case Study of Suzhou, China. Cities 2021, 110, 103063. [Google Scholar] [CrossRef]
- Sharma, T.; Jain, S. Nexus between Built Environment, Travel Behaviour and Human Health: An Integrated Framework to Reinform Transport System. J. Clean. Prod. 2023, 416, 137744. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, C.; Wang, C.; Cheng, Z. Human Perception Evaluation System for Urban Streetscapes Based on Computer Vision Algorithms with Attention Mechanisms. Trans. GIS 2022, 26, 2440–2454. [Google Scholar] [CrossRef]
- Feuillet, T.; Salze, P.; Charreire, H.; Menai, M.; Enaux, C.; Perchoux, C.; Hess, F.; Kesse-Guyot, E.; Hercberg, S.; Simon, C.; et al. Built Environment in Local Relation with Walking: Why Here and Not There? J. Transp. Health 2016, 3, 500–512. [Google Scholar] [CrossRef]
- Tao, T.; Wu, X.; Cao, J.; Fan, Y.; Das, K.; Ramaswami, A. Exploring the Nonlinear Relationship between the Built Environment and Active Travel in the Twin Cities. J. Plan. Educ. Res. 2023, 43, 637–652. [Google Scholar] [CrossRef]
- Qin, K.; Xu, Y.; Kang, C.; Kwan, M. A Graph Convolutional Network Model for Evaluating Potential Congestion Spots Based on Local Urban Built Environments. Trans. GIS 2020, 24, 1382–1401. [Google Scholar] [CrossRef]
- Xiao, W.; Wei, Y.D. Assess the Non-Linear Relationship between Built Environment and Active Travel around Light-Rail Transit Stations. Appl. Geogr. 2023, 151, 102862. [Google Scholar] [CrossRef]
- Ding, C.; Cao, X.; Dong, M.; Zhang, Y.; Yang, J. Non-Linear Relationships between Built Environment Characteristics and Electric-Bike Ownership in Zhongshan, China. Transp. Res. Part D Transp. Environ. 2019, 75, 286–296. [Google Scholar] [CrossRef]
- Xu, Y.; Yan, X.; Liu, X.; Zhao, X. Identifying Key Factors Associated with Ridesplitting Adoption Rate and Modeling Their Nonlinear Relationships. Transp. Res. Part A Policy Pract. 2021, 144, 170–188. [Google Scholar] [CrossRef]
- Rui, J.; Xu, Y. Beyond Built Environment: Unveiling the Interplay of Streetscape Perceptions and Cycling Behavior. Sustain. Cities Soc. 2024, 109, 105525. [Google Scholar] [CrossRef]
- Hatami, F.; Rahman, M.M.; Nikparvar, B.; Thill, J.-C. Non-Linear Associations Between the Urban Built Environment and Commuting Modal Split: A Random Forest Approach and SHAP Evaluation. IEEE Access 2023, 11, 12649–12662. [Google Scholar] [CrossRef]
- Bone, C.; Wulder, M.A.; White, J.C.; Robertson, C.; Nelson, T.A. A GIS-Based Risk Rating of Forest Insect Outbreaks Using Aerial Overview Surveys and the Local Moran’s I Statistic. Appl. Geogr. 2013, 40, 161–170. [Google Scholar] [CrossRef]
- Zhang, X.; Li, W.; Zhang, F.; Liu, R.; Du, Z. Identifying Urban Functional Zones Using Public Bicycle Rental Records and Point-of-Interest Data. IJGI 2018, 7, 459. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Y.; Zhong, Y. Spatial and Temporal Characteristic Analysis of Imbalance Usage in the Hangzhou Public Bicycle System. IJGI 2021, 10, 637. [Google Scholar] [CrossRef]
- Zhu, H.; Nan, X.; Yang, F.; Bao, Z. Utilizing the Green View Index to Improve the Urban Street Greenery Index System: A Statistical Study Using Road Patterns and Vegetation Structures as Entry Points. Landsc. Urban Plan. 2023, 237, 104780. [Google Scholar] [CrossRef]
- Zhou, L.; Dang, X.; Sun, Q.; Wang, S. Multi-Scenario Simulation of Urban Land Change in Shanghai by Random Forest and CA-Markov Model. Sustain. Cities Soc. 2020, 55, 102045. [Google Scholar] [CrossRef]
- Ewing, R.; Handy, S. Measuring the Unmeasurable: Urban Design Qualities Related to Walkability. J. Urban Des. 2009, 14, 65–84. [Google Scholar] [CrossRef]
- Nasar, J.L. Urban Design Aesthetics: The Evaluative Qualities of Building Exteriors. Environ. Behav. 1994, 26, 377–401. [Google Scholar] [CrossRef]
- Salleh, B.S.; Rahmat, R.A.A.O.; Ismail, A. Research Article A Study on Non-Motorised (NMT) Activities for Urban Environment. Res. J. Appl. Sci. Eng. Technol. 2014, 7, 290–295. [Google Scholar] [CrossRef]
- Handy, S.L. Urban Form and Pedestrian Choices: Study of Austin Neighborhoods. Transp. Res. Rec. J. Transp. Res. Board 1996, 1552, 135–144. [Google Scholar] [CrossRef]
- Ewing, R.; Dumbaugh, E. The Built Environment and Traffic Safety: A Review of Empirical Evidence. J. Plan. Lit. 2009, 23, 347–367. [Google Scholar] [CrossRef]
- Arellana, J.; Saltarín, M.; Larrañaga, A.M.; Alvarez, V.; Henao, C.A. Urban Walkability Considering Pedestrians’ Perceptions of the Built Environment: A 10-Year Review and a Case Study in a Medium-Sized City in Latin America. Transp. Rev. 2020, 40, 183–203. [Google Scholar] [CrossRef]
- Alabi, R.O.; Elmusrati, M.; Leivo, I.; Almangush, A.; Mäkitie, A.A. Machine Learning Explainability in Nasopharyngeal Cancer Survival Using LIME and SHAP. Sci. Rep. 2023, 13, 8984. [Google Scholar] [CrossRef]
- Lundberg, S.M.; Lee, S.-I. A Unified Approach to Interpreting Model Predictions. In Proceedings of the Advances in Neural Information Processing Systems; Guyon, I., Luxburg, U.V., Bengio, S., Wallach, H., Fergus, R., Vishwanathan, S., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2017; Volume 30, ISBN 9781510860964. [Google Scholar]
- Rao, J.; Ma, J.; Dong, G. How Mobility-Based Exposure to Green Space and Environmental Pollution Influence Individuals’ Wellbeing? A Structural Equation Analysis through the Lens of Environmental Justice. Landsc. Urban Plan. 2024, 252, 105199. [Google Scholar] [CrossRef]
- Xiao, L.; Lo, S.; Liu, J.; Zhou, J.; Li, Q. Nonlinear and Synergistic Effects of TOD on Urban Vibrancy: Applying Local Explanations for Gradient Boosting Decision Tree. Sustain. Cities Soc. 2021, 72, 103063. [Google Scholar] [CrossRef]
- Carlino, G.A.; Saiz, A. Beautiful City: Leisure Amenities and Urban Growth. J. Reg. Sci. 2019, 59, 369–408. [Google Scholar] [CrossRef]
- Clark, T.N.; Lloyd, R.; Wong, K.K.; Jain, P. Amenities Drive Urban Growth. J. Urban Aff. 2002, 24, 493–515. [Google Scholar] [CrossRef]
- Wang, M. Polycentric Urban Development and Urban Amenities: Evidence from Chinese Cities. Environ. Plan. B Urban Anal. City Sci. 2021, 48, 400–416. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Factors | Abbreviation | Data Source |
|---|---|---|---|
| Esthetic comfort | Park and Square | PKS | POI |
| Building Height-to-Width Ratio | BHR | Baidu buildings | |
| Building Density | BD | Baidu buildings | |
| Functional comfort | Parking Meter | PM | Street view |
| Food and Beverages | FB | POI | |
| Public Facility | PF | POI | |
| Enterprises | ENTs | POI | |
| Shopping | S | POI | |
| Transportation Service | TS | POI | |
| Finance and Insurance Service | FIS | POI | |
| Commercial House | CH | POI | |
| Daily Life Service | DLS | POI | |
| Sports and Recreation | SR | POI | |
| Accommodation Service | AS | POI | |
| Safety comfort | Traffic Light | TL | Street view |
| Fire Hydrant | FH | Street view | |
| Parking Sign | PGS | Street view | |
| Medical Service | MS | POI | |
| Social comfort | Cats and Dogs | CDs | Street view |
| Residents | Rs | Mobile data | |
| Employees | EMPs | Mobile data | |
| Science/Culture and Education Service | SES | POI | |
| Governmental Organization and Social Group | GOSG | POI |
| Elements | Mean | Range | Median | Standard Deviation | Variable Type | Statistic Method |
|---|---|---|---|---|---|---|
| Pedestrian | 1243.87 | [0, 5000] | 994.13 | 979.24 | Y | kernel density |
| Bicycle | 443.78 | [0, 3828] | 274.82 | 547.80 | Y | kernel density |
| E-Bikes | 218.21 | [0, 868] | 218.21 | 166.24 | Y | kernel density |
| Traffic Light | 0.21 | [0, 8] | 0.00 | 0.66 | X | count |
| Fire Hydrant | 0.02 | [0, 3] | 0.00 | 0.14 | X | count |
| Parking Sign | 0.02 | [0, 2] | 0.00 | 0.13 | X | count |
| Parking Meter | 0.00 | [0, 1] | 0.00 | 0.03 | X | count |
| Cats and Dogs | 0.00 | [0, 1] | 0.00 | 0.04 | X | count |
| Model | Random Forest | XGBoost | OLS | ||||
|---|---|---|---|---|---|---|---|
| HP | MA | HP | MA | HP | MA | ||
| RMSE | Training Set | 55 | 42 | 125 | 86 | 617 | 522 |
| Test Set | 148 | 102 | 171 | 126 | 643 | 546 | |
| Adjusted R2 | Training Set | 0.996 | 0.995 | 0.978 | 0.978 | 0.459 | 0.216 |
| Test Set | 0.970 | 0.965 | 0.960 | 0.957 | 0.438 | 0.200 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruan, Y.; Zhang, X.; Wang, S.; Chen, X.; Chen, Q. Street View-Enabled Explainable Machine Learning for Spatial Optimization of Non-Motorized Transportation-Oriented Urban Design. Land 2025, 14, 1347. https://doi.org/10.3390/land14071347
Ruan Y, Zhang X, Wang S, Chen X, Chen Q. Street View-Enabled Explainable Machine Learning for Spatial Optimization of Non-Motorized Transportation-Oriented Urban Design. Land. 2025; 14(7):1347. https://doi.org/10.3390/land14071347
Chicago/Turabian StyleRuan, Yichen, Xiaoyi Zhang, Shaohua Wang, Xiuxiu Chen, and Qiuxiao Chen. 2025. "Street View-Enabled Explainable Machine Learning for Spatial Optimization of Non-Motorized Transportation-Oriented Urban Design" Land 14, no. 7: 1347. https://doi.org/10.3390/land14071347
APA StyleRuan, Y., Zhang, X., Wang, S., Chen, X., & Chen, Q. (2025). Street View-Enabled Explainable Machine Learning for Spatial Optimization of Non-Motorized Transportation-Oriented Urban Design. Land, 14(7), 1347. https://doi.org/10.3390/land14071347