
Monitoring Slope Stability: A Comprehensive Review of UAV Applications in Open-Pit Mining


 ,
,
Abstract
1. Introduction
1.1. The Role of UAVs in Contemporary Mining
1.2. Multidisciplinary Integration for UAV-Based Slope Stability Research
1.3. The Ultimate Scope of UAV-Based Ground Displacement Monitoring
1.4. Research Trends (2014–2024) and Industry Benefits
1.5. Gaps in the Literature
- Standardized Methodologies: Current studies employ diverse workflows for flight planning, camera calibration, and data processing, making it difficult to compare outcomes across different mine sites [4,29,30]. Developing consistent, validated protocols—from determining the optimal flight altitude to defining uniform ground control point (GCP) distributions—would greatly enhance transferability and reproducibility.
- Long-Term Monitoring and Time-Series Analysis: Many investigations rely on single or short-term UAV campaigns [1,7]. While these confirm feasibility, they do not capture cumulative effects such as progressive slope deformation, seasonal cycles, or climate-related impacts [7,18]. Establishing continuous monitoring programs (e.g., routine flights every few weeks or months) could produce robust datasets that highlight subtle trends in slope behavior over extended timescales.
- Cost–Benefit and Life-Cycle Assessments: Although UAV deployments are frequently touted as cost-effective, comprehensive economic analyses linking capital expenses, operational savings, and risk reduction remain limited [12,19,29]. More transparent life-cycle studies, detailing the financial returns from averting slope failures and minimizing production downtime, would help justify larger-scale investments in UAV technologies.
- Bridging Micro-Displacement Detection and Geotechnical Action: While UAV-based methods excel at identifying micro displacements or low-level slope movements [7,9,10], a significant gap lies in translating these early warnings into immediate, site-specific geotechnical responses. Often, minimal slope changes remain unaddressed because no formal mechanism is in place to convert fine-scale remote sensing signals into actionable reinforcement measures or design modifications [13,18]. Developing integrated platforms that streamline this process, connecting data analytics to rapid engineering solutions, remains a crucial challenge.
- Mine Transition and Future Land Use: Much of the UAV literature centers on active mining operations. However, effective transition strategies involve ongoing evaluation of slope integrity and landform adaptation beyond peak extraction periods [5,6,13]. Planning for ultimate land uses, such as conservation zones or economic redevelopment, necessitates high-resolution monitoring to identify emerging stability concerns early, ensuring that any repurposing or co-purposing of the site proceeds safely and sustainably [29,31].
1.6. Study Aims and Structure
2. Materials and Methods
3. Thematic Review of UAV-Based Slope Stability Research
- Technological Debates: hardware constraints (traditional ground-based instruments vs. UAVs) and new application domains;
- Methodological Approaches: contrasting quantitative vs. qualitative designs; photogrammetric vs. LiDAR data capture; machine learning in data analysis;
- Critical Analysis: strengths, limitations, inconsistencies, and open debates regarding UAV usage.
3.1. Emergence of UAV Applications in Open-Pit Mines and Dumps
3.1.1. Traditional Monitoring vs. The UAV Paradigm
- UAV platforms equipped with high-resolution cameras or scanning devices can rapidly capture extensive datasets and offer DEMs with high spatial resolution [9,13,29,31]. Ground sampling distances of just a few centimeters per pixel enable the detection of fractures, cracks, or other micro-topographic features [2,3,6,11,17,18,23];
3.1.2. Application Domains
- Mine Waste Dumps: Mine waste is produced in immense volumes during surface extraction. Mine waste dumps require continuous stability monitoring due to their inherently loose structure, which makes them more prone to failure than excavation faces and mine slopes [29]. UAVs have been deployed to gauge slope geometry, detect self-heating zones in coal spoil, or track vegetation regrowth [9,12,36];
3.2. Key Methodological Themes
3.2.1. Photogrammetric Techniques and Workflow
- Advantages include relatively low cost, ease of data gathering, and sub-decimeter resolution. Yet, photogrammetry struggles if surfaces lack texture or color variation, e.g., uniform fine-grained tailings or dark coal surfaces [3,12]. Shadows or steep bench faces can also degrade tie-point matching. Despite these issues, photogrammetry remains the go-to method for volumetric computations, land cover classification, and general site mapping across numerous slope stability applications [1,7,22,29].
3.2.2. UAV-Borne LiDAR and Multi-Sensor Fusion
- Independent of ambient lighting or color contrast;
- Able to filter ground vs. vegetation returns to produce more accurate bare-earth models;
- High point densities, often hundreds of points/m2, are beneficial in steep or irregular slopes [3].
3.2.3. Machine Learning and Automated Feature Extraction
- Deployment: Models are applied to new UAV flights for multi-temporal analyses or real-time hazard detection.
3.2.4. Monitoring Spatiotemporal Changes
- DEM Differencing: Subtract DEMs from subsequent surveys to identify volumetric changes (e.g., slump volumes and waste pile expansions).
- Feature Tracking: Tie-point matching across orthophotos to measure horizontal shifts or crack expansions.
- Researchers of an open-pit lignite project discovered a landslide by comparing LiDAR surveys from two different months, observing a large slip [3]. Another study used repeated UAV flights to track the thermal behavior of coal waste dumps, revealing how infiltration or rainfall can influence spontaneous combustion events [12]. The UAV-based methodologies are not real-time, since flights typically occur weekly, monthly, or ad hoc, but they vastly improve spatiotemporal coverage over older methods.
3.3. Critical Analysis of the Thematic Review Findings
4. Current Trends and Gaps
4.1. Key Thematic Trends
4.1.1. Trend 1: Photogrammetry as a Cost-Effective Standard
- Photogrammetry, especially using Structure from Motion (SfM) and Multi-View Stereo MVS, dominates UAV-based mapping in surface mining [2,19,27,30]. Thanks to improvements in off-the-shelf UAVs and open-source or commercial photogrammetry software, collecting hundreds or thousands of overlapping images (70–80% overlap) is technically straightforward [13,30,31]. The subsequent 3D point clouds and orthophotos achieve ground sampling distances of just a few centimeters, feasible with standard UAVs [36] and the integration of ground control points (GCPs) [2,35], enabling accurate volumetric calculations, slope angle assessments, and general site monitoring [16,24,27].
- Strength: Relatively low financial outlay compared to manned aerial surveys or expensive terrestrial scanners.
4.1.2. Trend 2: The Rise of UAV LiDAR in Complex Terrains
- Strength: Capable of extremely dense scans (hundreds of points/m2) that can highlight subtle cracks or displacements.
- Weakness: Hardware expense and integration complexities (IMU, GNSS, and flight planning).
- Implication: UAV LiDAR is still not as ubiquitous as photogrammetry, but for challenging sites—vegetation, deep shadow zones, and uniform tailings—LiDAR may be critical to high-fidelity topographic mapping.
4.1.3. Trend 3: Machine Learning and Deep Learning Integration
- Strength: Minimizes manual workload, reveals hidden patterns, and enables the near-automatic detection of anomalies or high-risk zones.
- Implication: Rapidly growing domain but lacking standard protocols. Inconsistent labeling or site specificity can hamper real-world adoption outside the original research context.
4.1.4. Trend 4: Expanding Focus on Dump Stability and Environmental Reclamation
- Strength: UAVs help map unstable or hazardous dumps that would be too dangerous for ground crews.
- Weakness: No universal guidelines exist for safe UAV flight over spontaneously combusting spoil, and data are typically acquired at discrete intervals rather than continuously.
- Implication: As open-pit operations produce larger dumps, UAV-based solutions become indispensable. Yet standardization, especially in ignition detection and 3D hazard modeling, is still lagging [12].
4.2. Key Gaps and Limitations
- Long-Term Monitoring Protocols: Frequent UAV flights are logistically challenging. Many studies rely on single flights or short-term or sporadic multi-temporal campaigns [3,8,16,29,36]. Sustained weekly or monthly UAV flights integrated with in situ sensors, especially to predict early deformations, remain relatively rare [9]. Moreover, real-time or near-real-time data integration with slope stability radars or GNSS networks is not fully addressed [13,15].
- Scalability and Automation: Most UAV-based solutions remain semi-manual—flight planning, GCP deployment, model calibration, and machine learning labeling. High labor demands limit scale in mega-mines or multi-bench environments [9,27,30]. True automation, such as autonomous recharge or drone swarms, is still experimental [13,14].
- Cost–Benefit Analyses: Though UAVs are reputed to be “cost-effective”, few publications provide lifecycle cost comparisons vs. ground-based laser scanning, slope stability radars, or manned aircraft [1,13,26,29]. Without objective analyses, site operators may hesitate to invest in advanced UAV LiDAR or multi-sensor payloads.
- Integration with Geotechnical Data: While the morphological detection of cracks or bulges is frequent, combining UAV morphological data with in situ geotechnical measurements like pore pressures, friction angles, or seismic velocity profiles remains minimal in the open literature [12,13,29]. This gap hinders a truly integrated approach to slope stability predictions.
- Mine Waste Dumps: While numerous references [22,29,36] highlight the significance of dumps, further studies on multi-sensor integration for spontaneously combusting or chemically reactive dumps are needed. Thermal or hyperspectral UAV sensors, combined with geoelectrical or magnetometric resistivity approaches [26,32], could yield comprehensive risk assessments.
4.3. Critical Reflections
5. Future Directions
5.1. Toward Fully Integrated Monitoring Frameworks
- Automated Hubs: Self-recharging stations would let UAVs land, recharge, and relaunch on pre-set schedules or triggered by alerts (e.g., from in situ sensors detecting micro-seismic events) [14].
5.2. Advances in Sensor Fusion and Multi-Sensor Payloads
- Ground Penetrating Radar or Magnetometric Devices: Potentially workable if the UAV lift capacity increases, enabling sub-surface anomaly detection or preferential flow path identification [32].
5.3. Evolving Machine Learning Methodologies
- Transfer Learning and Federated Models: Instead of training separate CNNs for each mine, a generalized “foundation model” could be fine-tuned to local conditions [14,15]. This demands well-structured, labeled datasets from diverse geology so that networks learn robust features (e.g., cracks, rock outcrops, and vegetation patterns).
5.4. Standardizing Protocols and Best Practices
5.5. Toward Real-Time Hazard Warning
- Onboard Processing: Although near-real-time photogrammetry or LiDAR data processing with GPU acceleration on UAVs or ground-based stations has begun to receive scholarly and manufacturing attention [40], current implementations remain at a rudimentary stage and demand further research and adaptation to reach their full potential [14,23].
5.6. Environmental Reclamation and Post-Mine Use
- Sustainability Metrics: Multispectral imagery helps gauge vegetation health (NDVI, etc.), while LiDAR identifies gully erosion. ML can classify plant species or detect invasive growth [2].
- Public Engagement: High-resolution UAV maps might be shared with local communities or regulators, enhancing transparency around mine reclamation progress.
5.7. Bridging Geotechnical Data and 4D Analysis
6. Conclusions
- High-resolution photogrammetric or LiDAR data for accurate modeling of terrain and bench geometry;
- Efficient and flexible deployment, often at a lower cost than manned aerial or extensive ground-based surveys;
- Machine learning tools for automated anomaly detection, from tension cracks to self-heating in spoil;
- Environmental insights that help gauge reclamation success and sustainability.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Söğütcü, G. Low cost deformation analysis of open pit mine by using Unmanned Aerial Vehicle (UAV) technology. Master’s Thesis, Middle East Technical University, Ankara, Turkey, 2024. [Google Scholar]
- Yadav, T.K.; Mahavik, N. Development of monitoring open-pit mine rehabilitation based on UAV photogrammetry and deep learning. Master’s Thesis, Naresuan University, Phitsanulok, Thailand, 2020. [Google Scholar]
- Coccia, S.; Al Heib, M.; Klein, E. Combination of UAV-borne LiDAR and UAV-borne photogrammetry to assess slope stability. In Proceedings of the 7th World Congress on Civil, Structural, and Environmental Engineering, Online, 10–12 April 2022. [Google Scholar]
- Hao, J.; Zhang, X.; Wang, C.; Wang, H.; Wang, H. Application of UAV Digital Photogrammetry in Geological Investigation and Stability Evaluation of High-Steep Mine Rock Slope. Drones 2023, 7, 198. [Google Scholar] [CrossRef]
- Padró, J.-C.; Cardozo, J.; Montero, P.; Ruiz-Carulla, R.; Alcañiz, J.M.; Serra, D.; Carabassa, V. Drone-based identification of erosive processes in open-pit mining restored areas. Land 2022, 11, 212. [Google Scholar] [CrossRef]
- Shults, R.; Nurpeissova, M.; Burlibayeva, S.; Umirbayeva, A.; Turumbetov, T. Geomonitoring of the open pit mine slopes during subsoil development. Civ. Eng. J. Staveb. Obz. 2024, 33, 50–64. [Google Scholar] [CrossRef]
- Xiao, W.; Ren, H.; Sui, T.; Zhang, H.; Zhao, Y.; Hu, Z. A drone-and field-based investigation of the land degradation and soil erosion at opencast coal mine dumps after 5 years’ evolution of natural processes. Int. J. Coal Sci. Technol. 2022, 9, 42. [Google Scholar] [CrossRef]
- Wróblewska, M.; Kowalska, M.; Łupieżowiec, M. Slope stability analysis of post-mining dumps with the use of photogrammetric geometry measurements–a case study. Arch. Civ. Eng. 2023, 69, 171–185. [Google Scholar]
- Chand, K.; Koner, R. Failure zone identification and slope stability analysis of mine dump based on realistic 3D numerical modeling. Geotech. Geol. Eng. 2024, 42, 543–560. [Google Scholar] [CrossRef]
- Battulwar, R.; Valencia, J.; Winkelmaier, G.; Parvin, B.; Sattarvand, J. High-resolution modeling of open-pit slopes using UAV and photogrammetry. In Mining Goes Digital; CRC Press: Boca Raton, FL, USA, 2019; pp. 661–670. [Google Scholar]
- Saylan, A.A. Three-Dimensional Modeling and Monitoring of a Man Made Slope Using Images Taken from Unmanned Aerial Vehicle. Master’s Thesis, Dokuz Eylul Universitesi, Konak, Turkey, 2020. [Google Scholar]
- Layek, S.; Villuri, V.G.K.; Koner, R.; Chand, K. Rainfall & seismological dump slope stability analysis on active mine waste dump slope with UAV. Adv. Civ. Eng. 2022, 5858400. [Google Scholar]
- Vemulapalli, S.C.; Mesapam, S. Slope stability analysis for mine hazard assessment using UAV. J. Indian Soc. Remote Sens. 2021, 49, 1483–1491. [Google Scholar] [CrossRef]
- Battulwar, R.; Winkelmaier, G.; Valencia, J.; Naghadehi, M.Z.; Peik, B.; Abbasi, B.; Parvin, B.; Sattarvand, J. A practical methodology for generating high-resolution 3D models of open-pit slopes using UAVs: Flight path planning and optimization. Remote Sens. 2020, 12, 2283. [Google Scholar] [CrossRef]
- Shahbazi, M.; Sohn, G.; Theau, J.; Menard, P. UAV-based point cloud generation for open-pit mine modelling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-1/W4, 313–320. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef]
- Chand, K.; Koner, R. Internal mine dump slope stability and failure zone identification using 3D modelling. J. Min. Environ. 2023, 14, 1105–1119. [Google Scholar]
- Stalin, J.L.; Gnanaprakasam, R.C.P. Application of unmanned aerial vehicle for mapping and modeling of Indian mines. J. Indian Soc. Remote Sens. 2020, 48, 841–852. [Google Scholar] [CrossRef]
- Bar, N.; Kostadinovski, M.; Tucker, M.; Byng, G.; Rachmatullah, R.; Maldonado, A.; Pötsch, M.; Gaich, A.; McQuillan, A.; Yacoub, T. Rapid and robust slope failure appraisal using aerial photogrammetry and 3D slope stability models. Int. J. Min. Sci. Technol. 2020, 30, 651–658. [Google Scholar] [CrossRef]
- Chen, J.; Li, K.; Chang, K.-J.; Sofia, G.; Tarolli, P. Open-pit mining geomorphic feature characterisation. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 76–86. [Google Scholar] [CrossRef]
- Francioni, M.; Salvini, R.; Stead, D.; Giovannini, R.; Riccucci, S.; Vanneschi, C.; Gulli, D. An integrated remote sensing-GIS approach for the analysis of an open pit in the Carrara marble district, Italy: Slope stability assessment through kinematic and numerical methods. Comput. Geotech. 2015, 67, 46–63. [Google Scholar] [CrossRef]
- Partsinevelos, P.; Agioutantis, Z.; Tripolitisiotis, A.; Schaefer, N. A Review of Unmanned Aerial Vehicles, Citizen Science, and Interferometry Remote Sensing in Landslide Hazards: Applications in Transportation Routes and Mining Environments. In Remote Sensing of Hydrometeorological; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Wu, X.; Guo, Q.; Zhang, J. Application of double GPS multi-rotor UAV in the investigation of high slope perilous rock-mass in an open pit iron mine. Geotech. Geol. Eng. 2020, 38, 71–78. [Google Scholar] [CrossRef]
- Medinac, F.; Esmaeili, K. A Stochastic-Deterministic Discrete Fracture Network Model for Pit Slope Stability Analysis Using UAV Collected Structural Data. In Proceedings of the ARMA US Rock Mechanics/Geomechanics Symposium, Houston, TX, USA, 28 June–1 July 2020. [Google Scholar]
- Chand, K.; Mankar, A.K.; Koner, R.; Naresh, A.R.V.S. Dump slope change detection and displacement monitoring using UAV close-range photogrammetry. Sādhanā 2024, 49, 1–19. [Google Scholar] [CrossRef]
- Zhan, X.; Zhang, X.; Wang, X.; Diao, X.; Qi, L. Comparative analysis of surface deformation monitoring in a mining area based on UAV-lidar and UAV photogrammetry. Photogramm. Rec. 2024, 39, 373–391. [Google Scholar] [CrossRef]
- Gül, Y.; Hastaoğlu, K.Ö.; Poyraz, F. Using the GNSS method assisted with UAV photogrammetry to monitor and determine deformations of a dump site of three open-pit marble mines in Eliktekke region, Amasya province, Turkey. Environ. Earth Sci. 2020, 79, 1–20. [Google Scholar] [CrossRef]
- Duarte, J.; Rodrigues, M.F.; Baptista, J.S. Data digitalisation in the open-pit mining industry: A scoping review. Arch. Comput. Methods Eng. 2021, 28, 3167–3181. [Google Scholar] [CrossRef]
- Nguyen, B.D. Identifying the Potential Application of Unmanned Aerial Vehicle Technology in Mine Waste Dumps. Inżynieria Miner. 2023, 2, 163–172. [Google Scholar]
- Zapico, I.; Laronne, J.B.; Castillo, L.S.; Duque, J.F.M. Improvement of workflow for topographic surveys in long highwalls of open pit mines with an unmanned aerial vehicle and structure from motion. Remote Sens. 2021, 13, 3353. [Google Scholar] [CrossRef]
- Beregovoi, D.; Younes, J.; Mustafin, M. Monitoring of quarry slope deformations with the use of satellite positioning technology and unmanned aerial vehicles. Procedia Eng. 2017, 189, 737–743. [Google Scholar] [CrossRef]
- Thiruchittampalam, S.; Banerjee, B.P.; Glenn, N.F.; McQuillan, A.; Raval, S. Granular characterisation of coal spoil dump using unmanned aerial vehicle data to enhance stability analysis. J. Rock Mech. Geotech. Eng. 2024. [CrossRef]
- Eker, R.; Aydın, A.; Görüm, T. Tracking deformation velocity via PSI and SBAS as a sign of landslide failure: An open-pit mine-induced landslide in Himmetoğlu (Bolu, NW Turkey). Nat. Hazards 2024, 120, 7701–7724. [Google Scholar] [CrossRef]
- Tsachouridis, S.; Pavloudakis, F.; Pilalidis, K.; Myronidis, L.; Roumpos, C. Monitoring slope stability in surface mines: Are low-cost UAVs used for excavated rock volume calculations capable of early detection of displacements? MATEC Web Conf. 2022, 373, 00052. [Google Scholar] [CrossRef]
- Tong, X.; Liu, X.; Chen, P.; Liu, S.; Luan, K.; Li, L.; Liu, S.; Liu, X.; Xie, H.; Jin, Y.; et al. Integration of UAV-Based Photogrammetry and Terrestrial Laser Scanning for the Three-Dimensional Mapping and Monitoring of Open-Pit Mine Areas. Remote Sens. 2015, 7, 6635–6662. [Google Scholar] [CrossRef]
- Kumar, A.; Khanduri, A.; Jain, P.K. Design and development of an autonomous unmanned aerial vehicle for surface coalmines surveillance. J. Phys. Conf. Ser. 2023, 2601, 012003. [Google Scholar] [CrossRef]
- Ge, Y.; Wang, H.; Liu, G.; Chen, Q.; Tang, H. Automated Identification of Rock Discontinuities from 3D Point Clouds Using a Convolutional Neural Network. Rock Mech. Rock Eng. 2025, 58, 3683–3700. [Google Scholar] [CrossRef]
- Deliormanli, A.H.; Maerz, N.H.; Otoo, J. Using terrestrial 3D laser scanning and optical methods to determine orientations of discontinuities at a granite quarry. Int. J. Rock Mech. Min. Sci. 2014, 66, 41–48. [Google Scholar] [CrossRef]
- Chen, Q.; Ge, Y.; Tang, H. Rock discontinuities characterization from large-scale point clouds using a point-based deep learning method. Eng. Geol. 2024, 337, 107585. [Google Scholar] [CrossRef]
- DJI Enterprise. How the Matrice 4E Streamlined 3D Modeling for Heritage Protection, YouTube, Uploaded by DJI Enterprise. Available online: https://www.youtube.com/watch?v=C9jRliB46I8 (accessed on 21 February 2025).
- Pagouni, C.; Pavloudakis, F.; Kapageridis, I.; Yiannakou, A. Transitional and Post-Mining Land Uses: A Global Review of Regulatory Frameworks, Decision-Making Criteria, and Methods. Land 2024, 13, 1051. [Google Scholar] [CrossRef]

{kind=link}
| Reference | Location | Key Features |
|---|---|---|
| Söğütcü, G., 2024 [1] | Turkey | Open-pit gold mine, photogrammetric data, open-source software analysis |
| Yadav, T.K. & N. Mahavik, 2020 [2] | Thailand | Rehabilitation of an open-pit mine, deep learning implementation, land classification |
| Coccia, S. et al., 2022 [3] | Poland | Open-pit lignite mine, LiDAR and photogrammetry, slope stability assessment |
| Hao, J. et al., 2023 [4] | China | Iron mine slope stability research, photogrammetric methods |
| Padró, J.C. et al., 2022 [5] | Spain | Open-pit quarries, photogrammetry and GIS combination, water erosion identification |
| Shults, R. et al., 2024 [6] | Kazakhstan | Open-pit metal mines, slope collapse analysis, geodetic surveys |
| Xiao, W. et al., 2021 [7] | Mongolia | Coal mine dumps’ degradation and erosion, UAV photogrammetry implementation |
| Wróblewska, M. et al., 2023 [8] | Poland | Spoil dumps, UAV photogrammetry, slope failure research |
| Chand, K. & K. Radhakanta, 2024 [9] | India | Dump slope failure zones assessment, 3D numerical modeling, UAVs |
| Layek S. et al., 2022 [12] | India | Active coal waste dump, Photogrammetric UAV methods for slope stability assessment |
| Leo Stalin, J. & R.C.P. Gnanaprakasam, 2020 [18] | India | Multiple mining sites, integration of UAV technology and traditional survey methods for slope stability and geospatial analysis |
| Francioni, M. et al., 2015 [21] | Italy | GIS, digital photogrammetry and remote sensing integration for slope performance analysis |
| Wu, X. et al., 2020 [23] | China | Open-pit iron mine research, LiDAR method implementation, point cloud data categorization |
| Medinac, F. & E. Kamran, 2020 [24] | U.S.A. | Mining pits, UAV photogrammetric methods, and traditional topography integration for slope failure analysis |
| Chand, K. et al., 2024 [25] | India | Coal mine dump failures, UAV close range photogrammetry, cloud-to-cloud algorithm for land displacement monitoring |
| Zhan, X. et al., 2024 [26] | China | Surface monitoring research on UAV photogrammetry and LiDAR methods |
| Gül, Y. et al., 2020 [27] | Turkey | Marble open pits, GNSS, and UAV photogrammetry integration methods |
| Zapico, I. et al., 2021 [30] | Spain | Open pit mines, vertical UAV photogrammetry for steep slope analysis |
| Beregovoi, D.V. et al., 2017 [31] | Austria | UAV photogrammetry and satellite remote sensing integration, pit slope monitoring |
| Thiruchittampalam, S. et al., 2024 [32] | Australia | Spoil dump research, UAV photogrammetry, and soil characterization techniques |
| Eker, R. et al., 2024 [33] | Turkey | Mapping of deformations using UAV photogrammetry, landslide assessments |
| Tsachouridis, S. et al., 2022 [34] | Greece | Open-pit coal mine, UAV photogrammetry, and traditional topography integration |
| Tong, X. et al., 2015 [35] | China | UAV photogrammetry and terrestrial scanning for open pit mine 3D monitoring |
| Feature | UAV Photogrammetry | UAV Lidar |
|---|---|---|
| Data Type | Overlapping 2D images True-Color Orthomosaics | 3D point clouds |
| Spatial Resolution | 5–20 cm GSD | 2–10 cm point spacing |
| Absolute Accuracy | H: 5–10 cm (with GCPs) | 2–5 cm |
| Environmental Sensitivity | Lighting, shadow, and texture dependencies | Robust in low lighting |
| Vegetation Penetration | Poor: Merges vegetation into the surface | Efficient: Captures distinctive vegetation features |
| Portability | High: Light equipment and rapid area coverage | Medium: Heavier equipment, shorter flight times |
| Cost | Low-cost implementation Average processing demands | Average to high-cost equipment, higher processing demands |
| Strength | Description |
|---|---|
| Fine-Scale Spatial Resolution | UAVs can map complex slopes in hours, achieving centimeter-level details unattainable by many satellite or manned aircraft systems [2,4,27,30]. |
| Rapid Coverage | UAVs enable fast deployment, reducing survey times in large areas [2,4,27,30]. |
| Enhanced Safety | Survey teams avoid unstable or combusting waste piles, limiting human exposure to hazards [22,29]. |
| Multi-Sensor Versatility | RGB, thermal, LiDAR, or hyperspectral payloads can handle slope stability, environmental, or operational tasks simultaneously [9,22,26,32]. |
| Long-Term Cost Savings | Once UAV hardware and training are in place, repeated flights become relatively low-cost, which is essential for ongoing monitoring [12,13,29]. |
| Weakness | Description |
|---|---|
| Regulatory Constraints | National aviation policies may cap flight altitudes, require line-of-sight operations, or complicate UAV usage near active mines [3,13,15]. |
| Weather Dependencies | Heavy wind, dust, or fog hamper UAV flights. Winter conditions delayed surveys in some lignite mines [3,23]. |
| Sensor Gaps | Photogrammetry fails in uniform or shadowed surfaces, LiDAR sees “no return” in water or extremely low-reflectivity zones [12]. |
| Inconsistent Standards | The lack of universal best practices for flight planning, accuracy thresholds, and machine learning validation complicate cross-site comparisons [7,13,22]. |
| Limited Flight Durations | Short flight durations limit the coverage area in large or complex mine sites. |
| Data Integration Challenges | There is difficulty in integrating UAV data with in situ sensors for real-time monitoring. |
| High Initial Costs | Despite claims of cost-effectiveness, the initial investment in UAV systems, especially with advanced sensors like LiDAR or thermal cameras, can be prohibitive for some operators. |
| Opportunity | Description |
|---|---|
| Scientific Integration | Different scientific areas could benefit from the research and fundamentally create multi-purpose tools for the mining industry based on data gathered from UAV applications. |
| AI and Machine Learning Integration | AI models can be developed for automatic data analysis, improving hazard detection and decision making. |
| Environmental Monitoring | UAVs can monitor post-mining reclamation, including vegetation health and acid mine drainage. |
| Threat | Description |
|---|---|
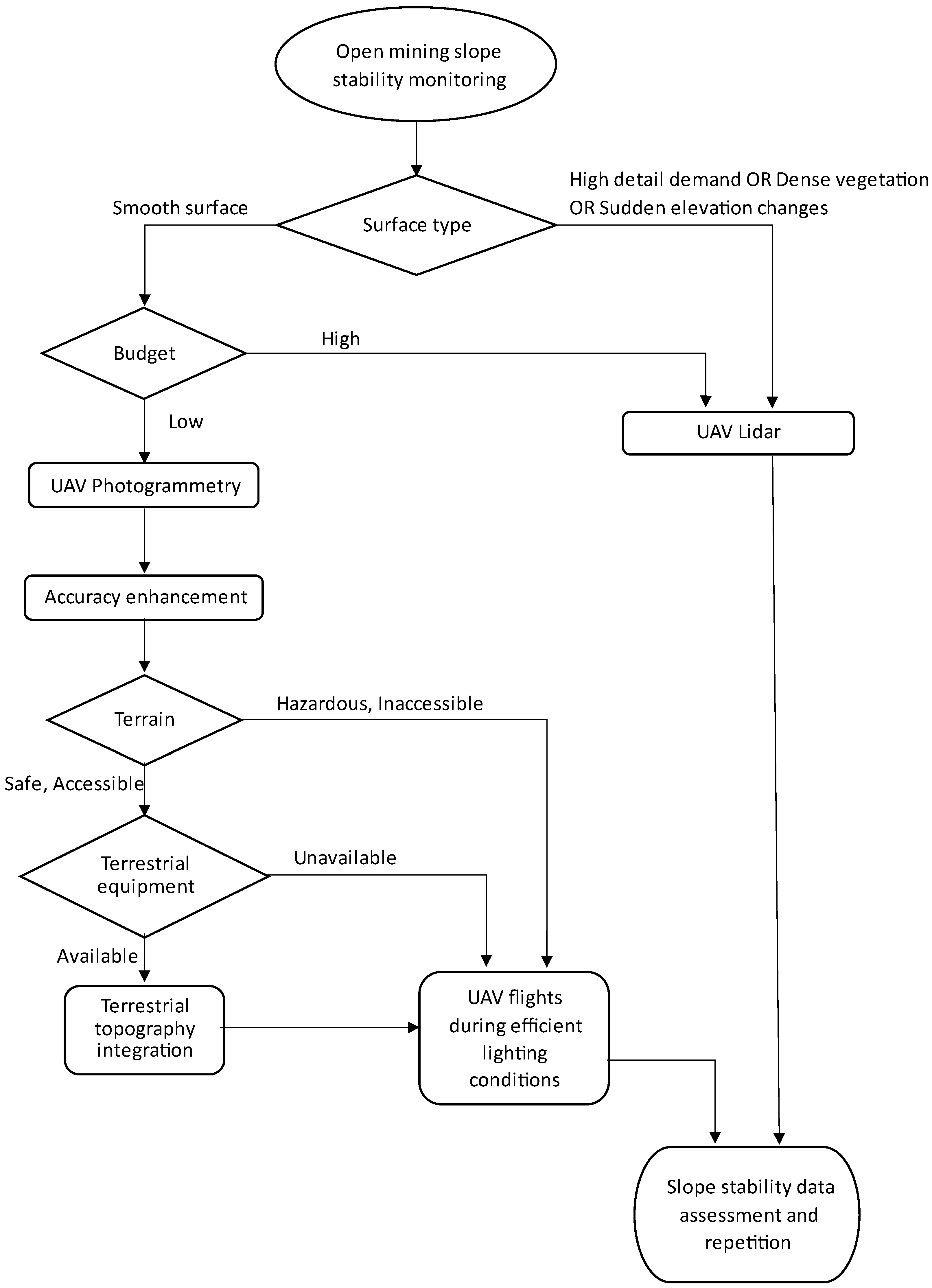
| Photogrammetry and LiDAR | Some studies champion LiDAR as superior for slope geometry, while others rely on cost-friendly photogrammetry [3,8,30,31]. Clear criteria, such as terrain characteristics, should be considered when deciding on the most appropriate method or their combined implementation. |
| Data Overload and Processing | Large volumes of imagery or LiDAR data demand powerful computing, specialized software, and robust training in photogrammetry or ML [1,2,32]. |
| Machine Learning Reliability | Although high accuracies are reported in controlled tests [3,9], real-world conditions may lower performance. Transferability across different geology or climate contexts remains underexplored [12,14]. |
| Monitoring Frequency | UAV surveys are typically discrete events, whereas slope failures can be sudden. Questions arise whether UAV data can be integrated into near-real-time hazard management frameworks [13,15]. |
| Technological Limitations | While UAVs are advancing, technical constraints such as payload capacity and battery life remain significant barriers in large-scale operations. |
| Regulatory Constraints | National aviation policies may cap flight altitudes, require line-of-sight operations, or complicate UAV usage near active mines [3,13,15]. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tsachouridis, S.; Pavloudakis, F.; Sachpazis, C.; Tsioukas, V. Monitoring Slope Stability: A Comprehensive Review of UAV Applications in Open-Pit Mining. Land 2025, 14, 1193. https://doi.org/10.3390/land14061193
Tsachouridis S, Pavloudakis F, Sachpazis C, Tsioukas V. Monitoring Slope Stability: A Comprehensive Review of UAV Applications in Open-Pit Mining. Land. 2025; 14(6):1193. https://doi.org/10.3390/land14061193
Chicago/Turabian StyleTsachouridis, Stephanos, Francis Pavloudakis, Constantinos Sachpazis, and Vassilios Tsioukas. 2025. "Monitoring Slope Stability: A Comprehensive Review of UAV Applications in Open-Pit Mining" Land 14, no. 6: 1193. https://doi.org/10.3390/land14061193
APA StyleTsachouridis, S., Pavloudakis, F., Sachpazis, C., & Tsioukas, V. (2025). Monitoring Slope Stability: A Comprehensive Review of UAV Applications in Open-Pit Mining. Land, 14(6), 1193. https://doi.org/10.3390/land14061193