


Numerical Modeling of the Three-Dimensional Wave-Induced Current Field

Abstract
1. Introduction
2. Analytical Model
- Exclusion of higher-order interaction terms. All contributions of order higher than —including wave–current and current–current interaction terms—are omitted to ensure consistency and closure of the governing equations [23]. While this choice streamlines the analytical derivation, it may limit fidelity in highly energetic, non-linear surf zones. Future model extensions will explore the retention of selected higher-order coupling terms (e.g., third- and fourth-order Stokes expansions) to better represent momentum exchange under breaking-wave conditions.
- Linear wave theory. Wave motion is described by inviscid, irrotational Airy theory, neglecting viscosity, capillarity, and non-linear wave–wave interactions. Although standard for radiation-stress calculations, this assumption omits the mean products of orthogonal velocity components emphasized by Rivero and Arcilla [24], as well as the “roller”, defined as the water mass that travels between the trough and the crest of a breaking wave at the phase speed [25]—which is an attempt to incorporate wave non-linearity in the near-shore zone. It is important to highlight, however, that Svendsen and Lorenz [26] calculated that the roller accounts for approximately 9% of the total computed flow velocities, which supports the decision to exclude it from the prototype stage of the developing three-dimensional model. Incorporating higher-order or fully non-linear wave theories (e.g., Stokes series or Boussinesq-type formulations) could improve predictions in shallow, strongly non-linear zones.
- Turbulence closure via eddy viscosity. Turbulent stresses are parameterized through a zero-equation model with distinct horizontal () and vertical () eddy viscosity coefficients under the Boussinesq hypothesis. This practical approach captures first-order mixing but may underrepresent the intense, localized variability of turbulence in stratified or near-breaking regions [27]. More advanced closures—such as k–, k–, or Reynolds-stress transport models—could dynamically adjust to local shear and buoyancy, thereby refining velocity and stress predictions in future implementations (see, e.g., [28,29]).
- Distribution-theory formulation of momentum transport. By employing the theory of distributions, we derive a quasi-turbulent stress tensor whose vertical integral recovers the classical radiation stresses of Longuet-Higgins and Stewart [30]. Concentrating the distributive terms at the free surface permits the use of standard partial-differential equations in the interior, with modified boundary conditions immediately above and below the mean water level.
- Volume transport equation:where , —horizontal vector of averaged velocity: , W—vertical component of averaged velocity.
- Momentum transport equation:where —water density, —internal radiation stress, Z—mean surface level, g—vertical component of gravitational acceleration, and:
3. Methods
3.1. Model Coefficients and Their Influence on Computations
3.1.1. Bottom Stress
3.1.2. Turbulent Stresses
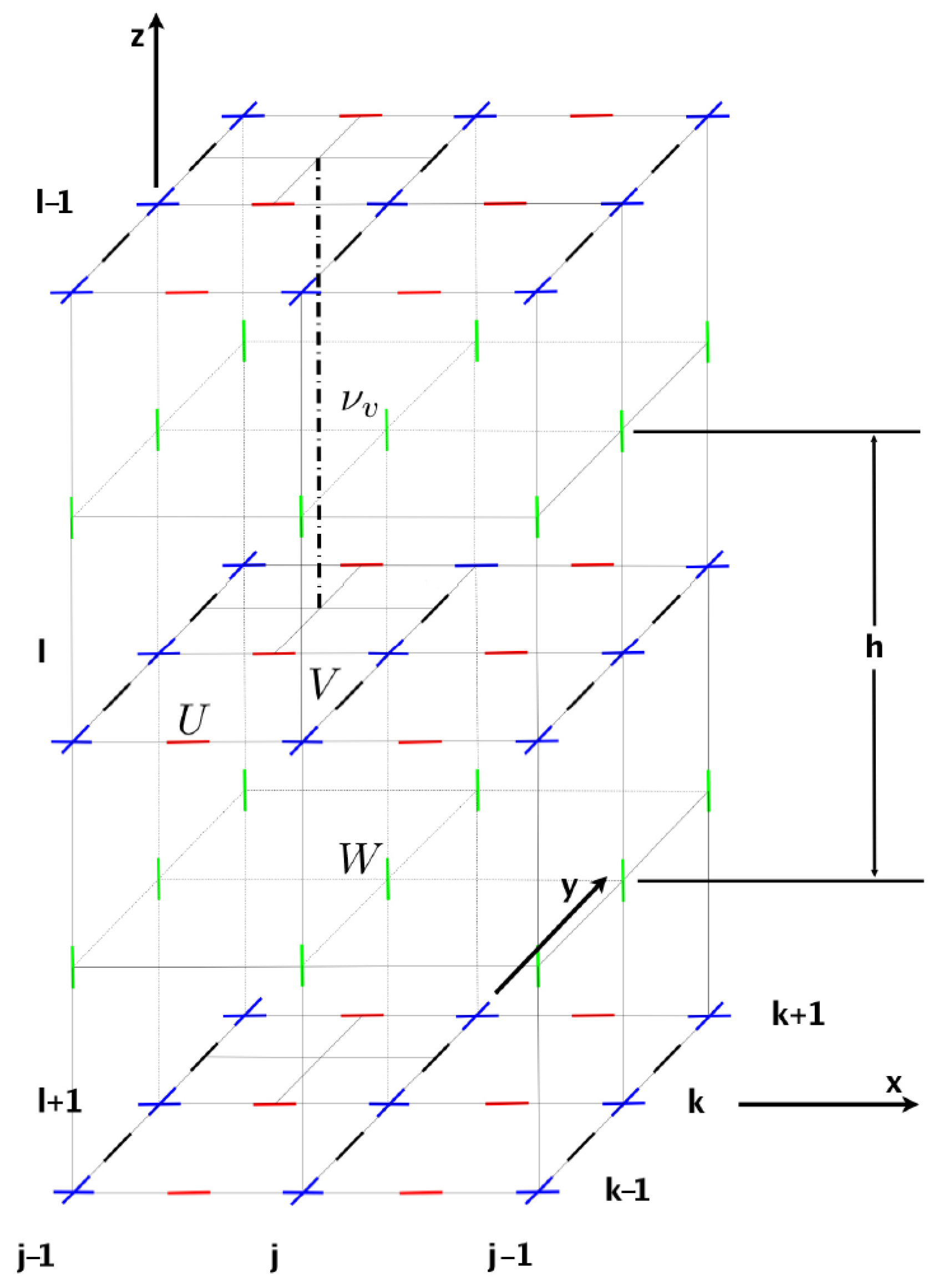
3.2. Numerical Grid
3.3. Sigma Coordinate System
3.4. Computation Algorithm
- At the shoreline:
- At other boundaries—no gradients in directions perpendicular to these boundaries.
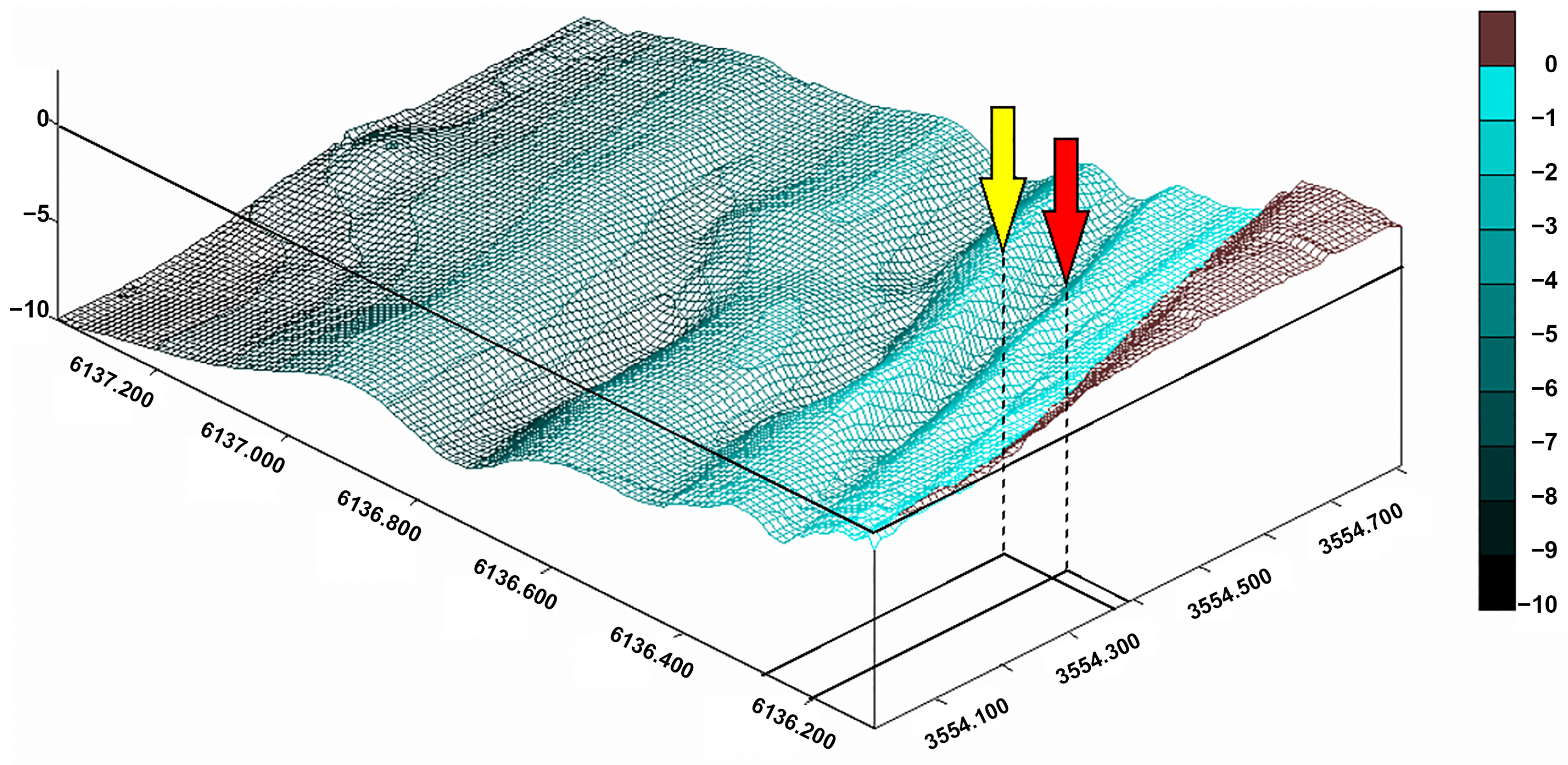
3.5. Input Data
- Bathymetric data measured during both field campaigns (in addition to depth values, these data also varied in their alongshore extent),
- Homogeneous wind fields measured at the shoreline, including both speed and direction, throughout the field campaigns.
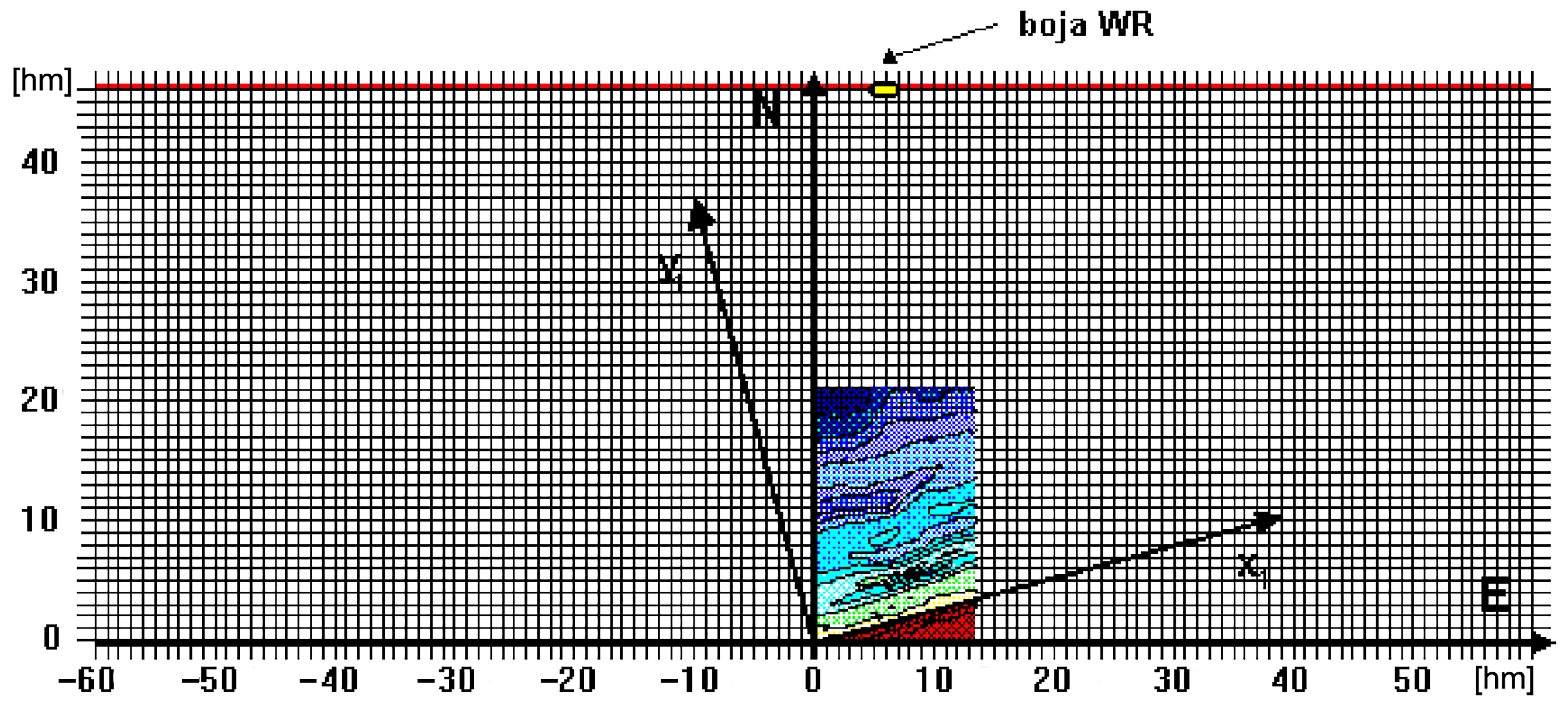
- Using an external grid with a spatial resolution of 100 m × 100 m, spanning a 4600 meter-wide area for the “Lubiatowo 2002” campaign or a 1850 meter-wide area for the “Lubiatowo 2006” campaign, characterized by a flat seabed with a uniform slope,
- Using an internal (smaller) grid with a spatial resolution of 10 m × 10 m, covering the region with detailed seabed topography (cases I–III).
4. Results and Discussion
4.1. Key Notations
- Uppercase letters A–D denote the individual cases of deep-water wave conditions considered in this study.
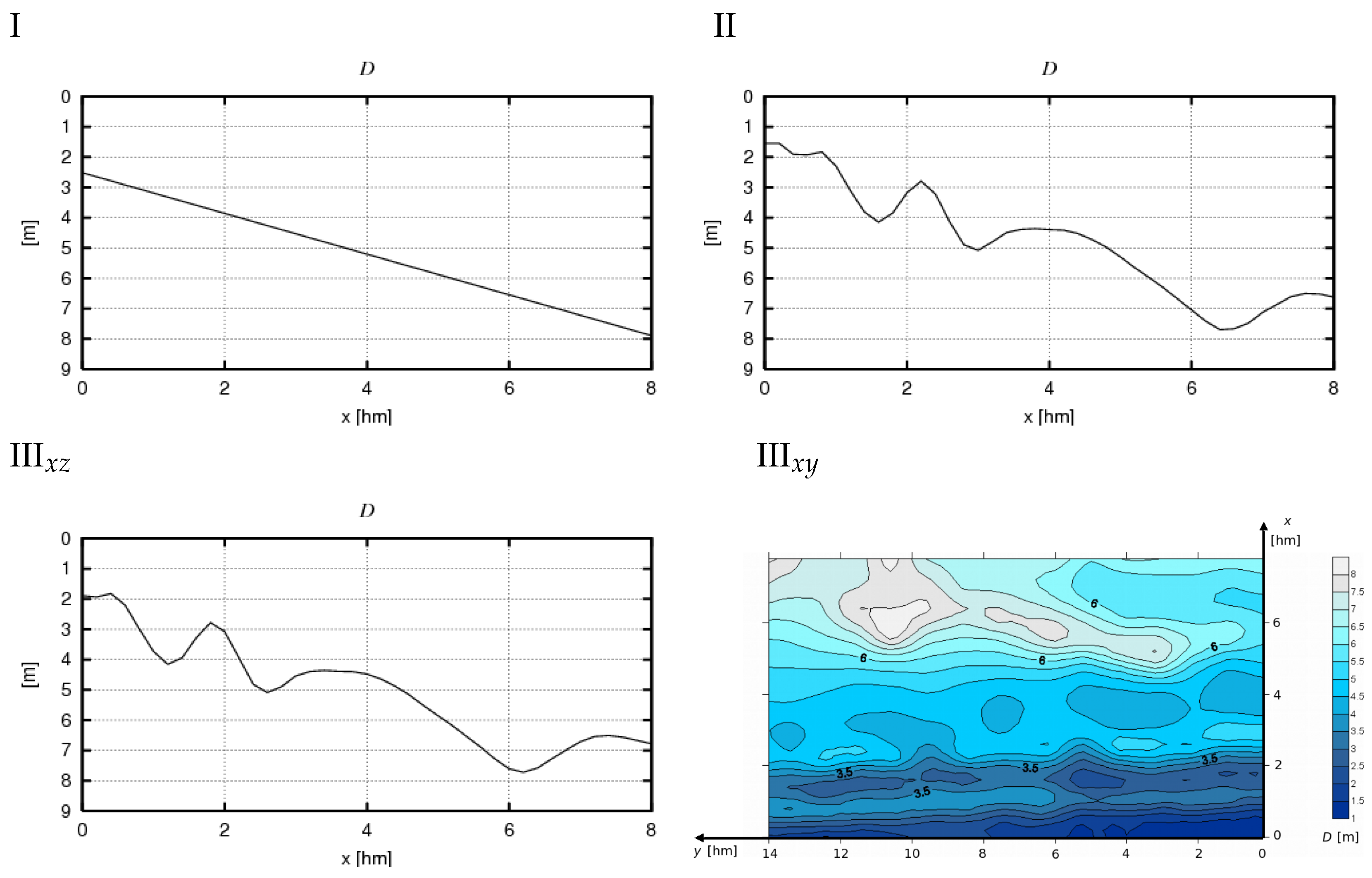
- Roman numerals I–III indicate specific bathymetric cases (ranging from a flat seabed with a constant slope and isobaths parallel to the shoreline to the actual seabed topography in the Lubiatowo region).
- Uppercase calligraphic letters and distinguish different types of computational procedures used in this study to solve the equations of the three-dimensional model:
- —using an analytical solution for general conditions;
- —using an analytical solution for specific conditions.
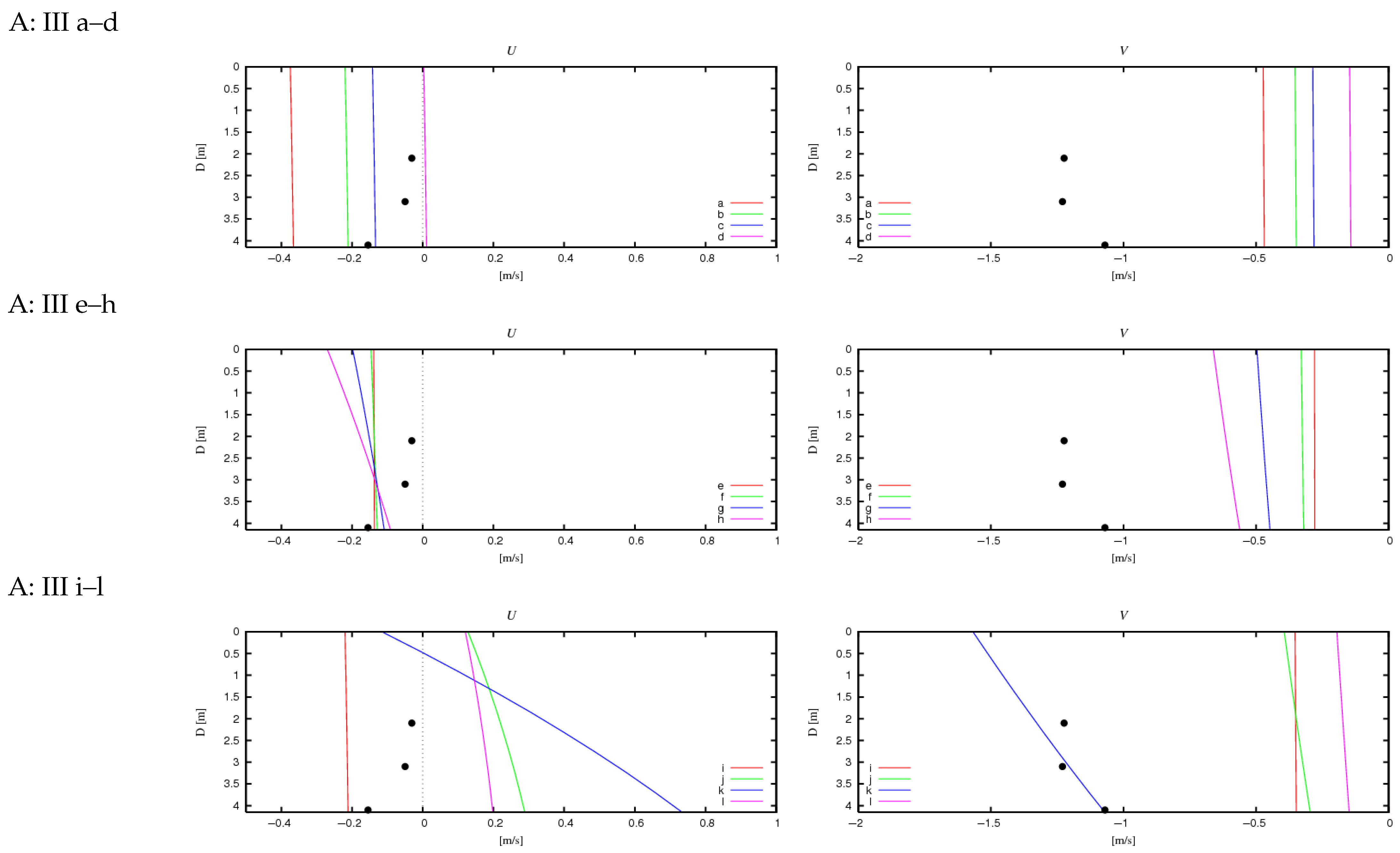
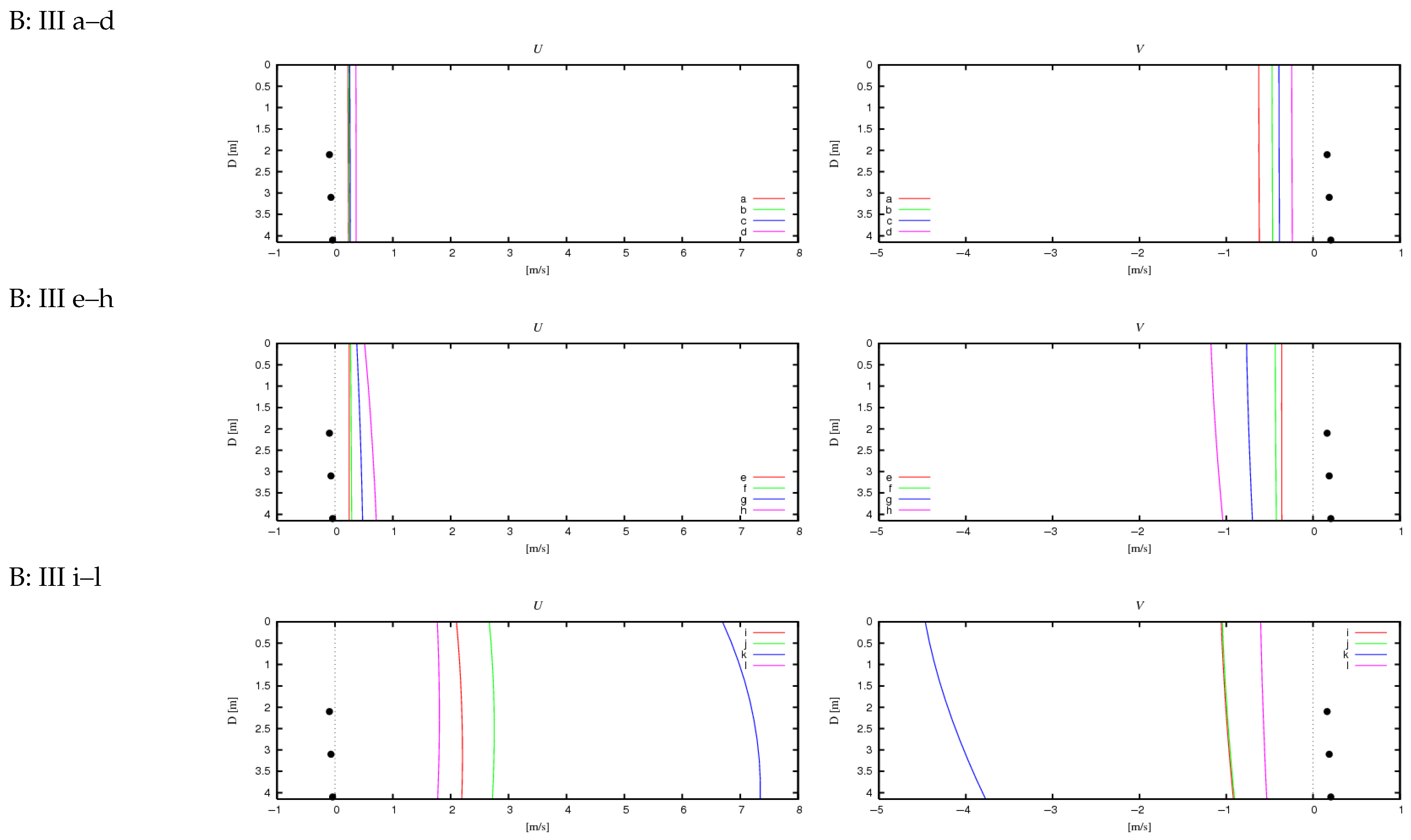
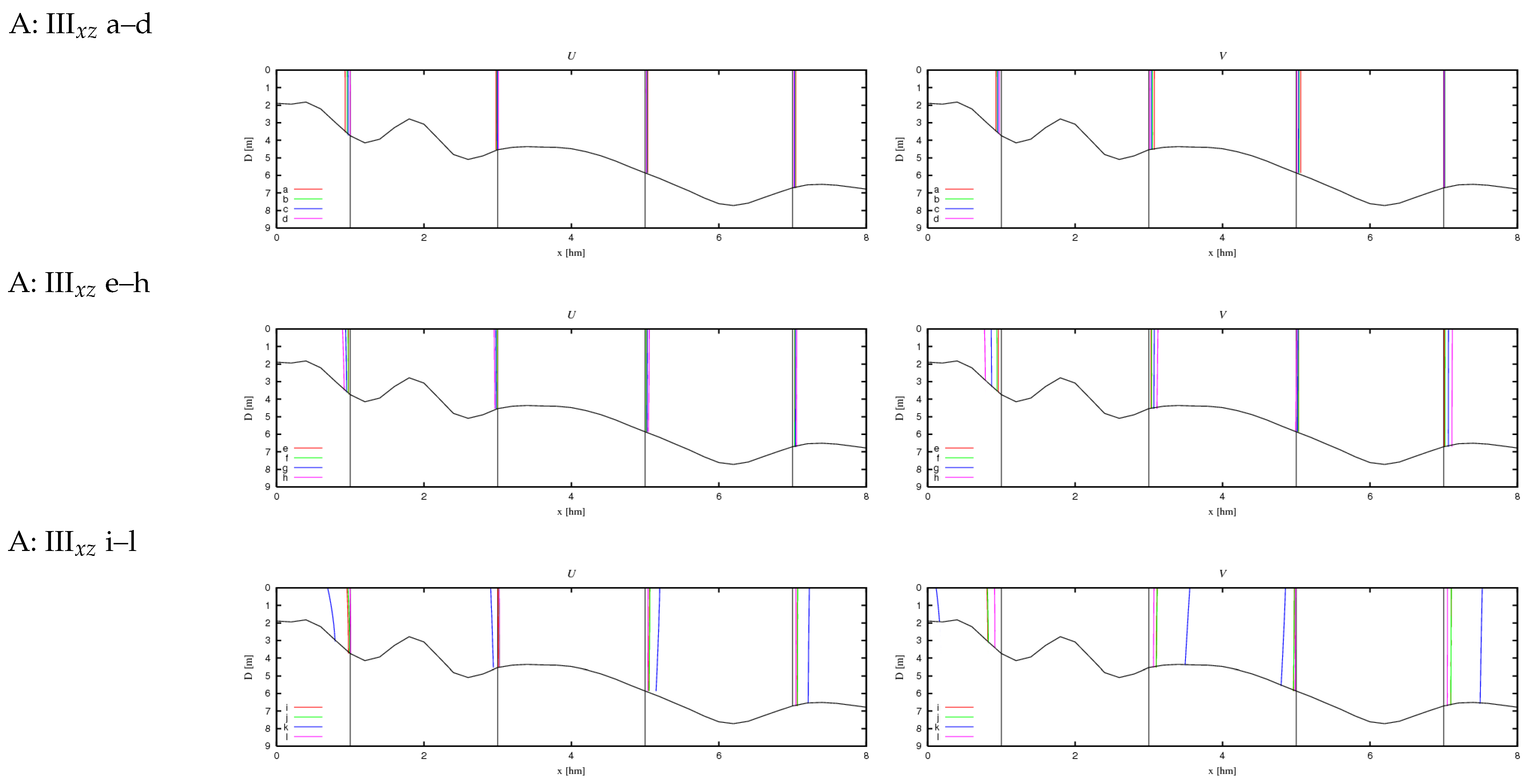
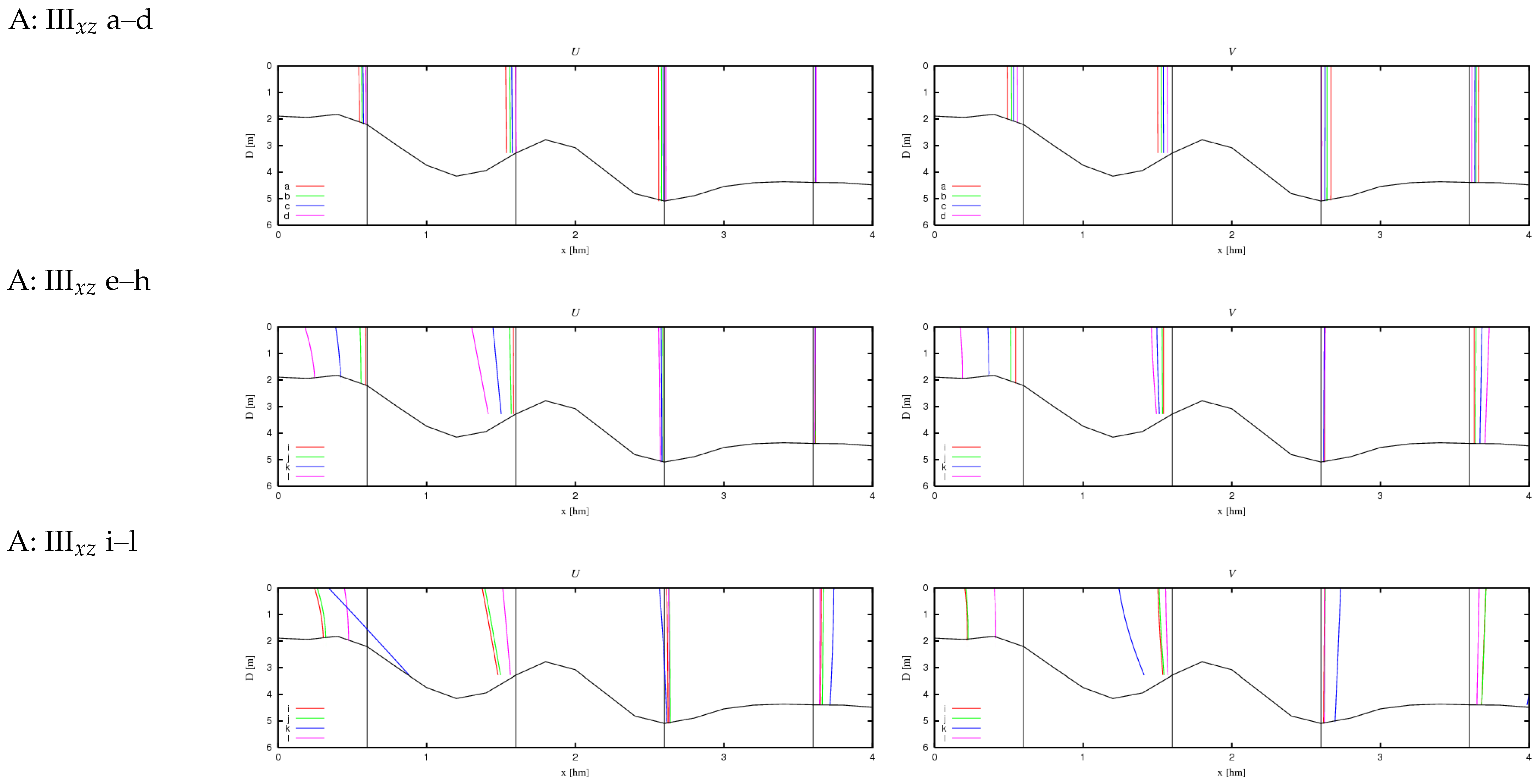
- Lowercase letters a–l denote individual “sets” of coefficients used for computations:
a: b: c: d: e: f: g: h: i: j: k: l:
4.2. Dependence of Obtained Values on Model Coefficients
4.3. Influence of Cross-Shore and Alongshore Bathymetric Variability on the Obtained Results
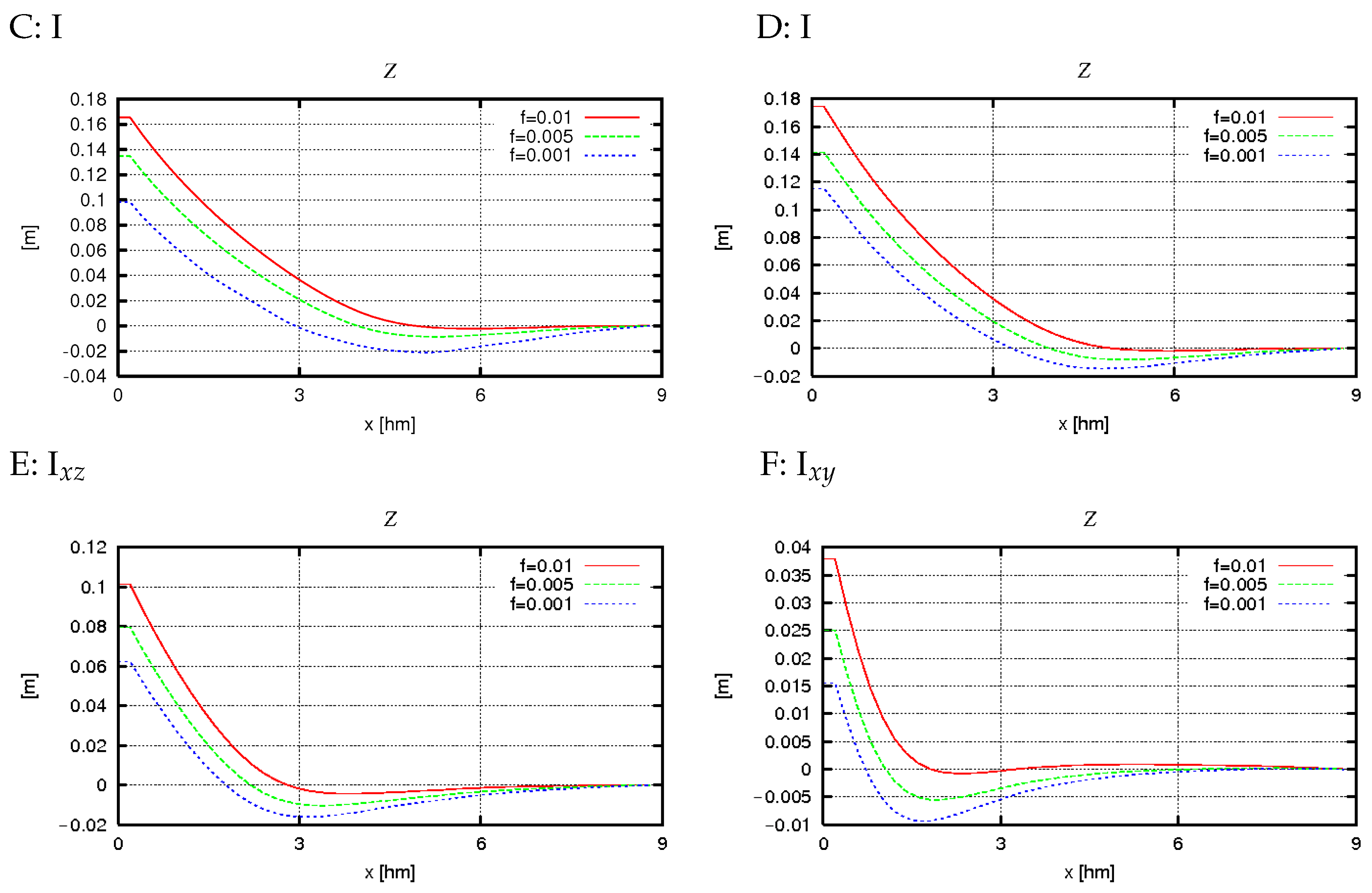
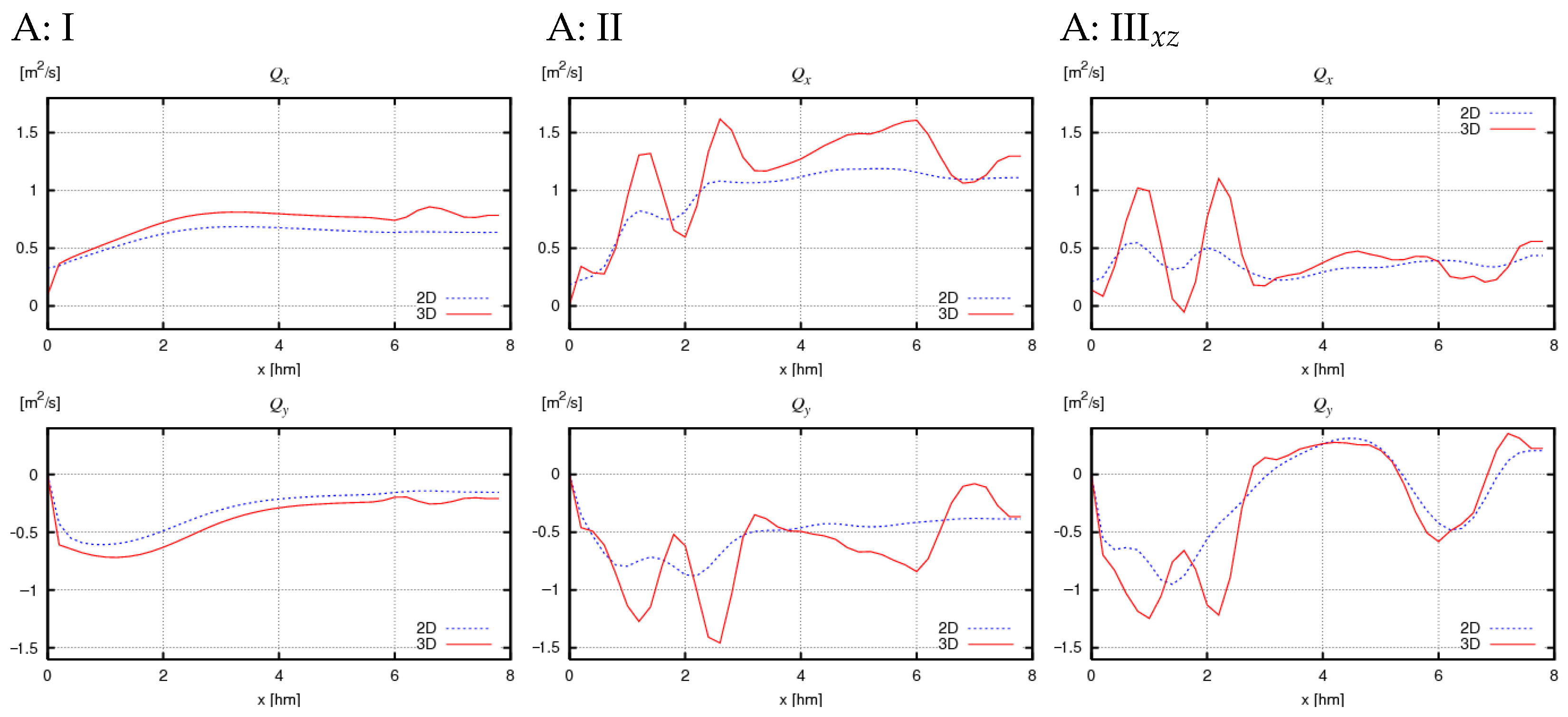
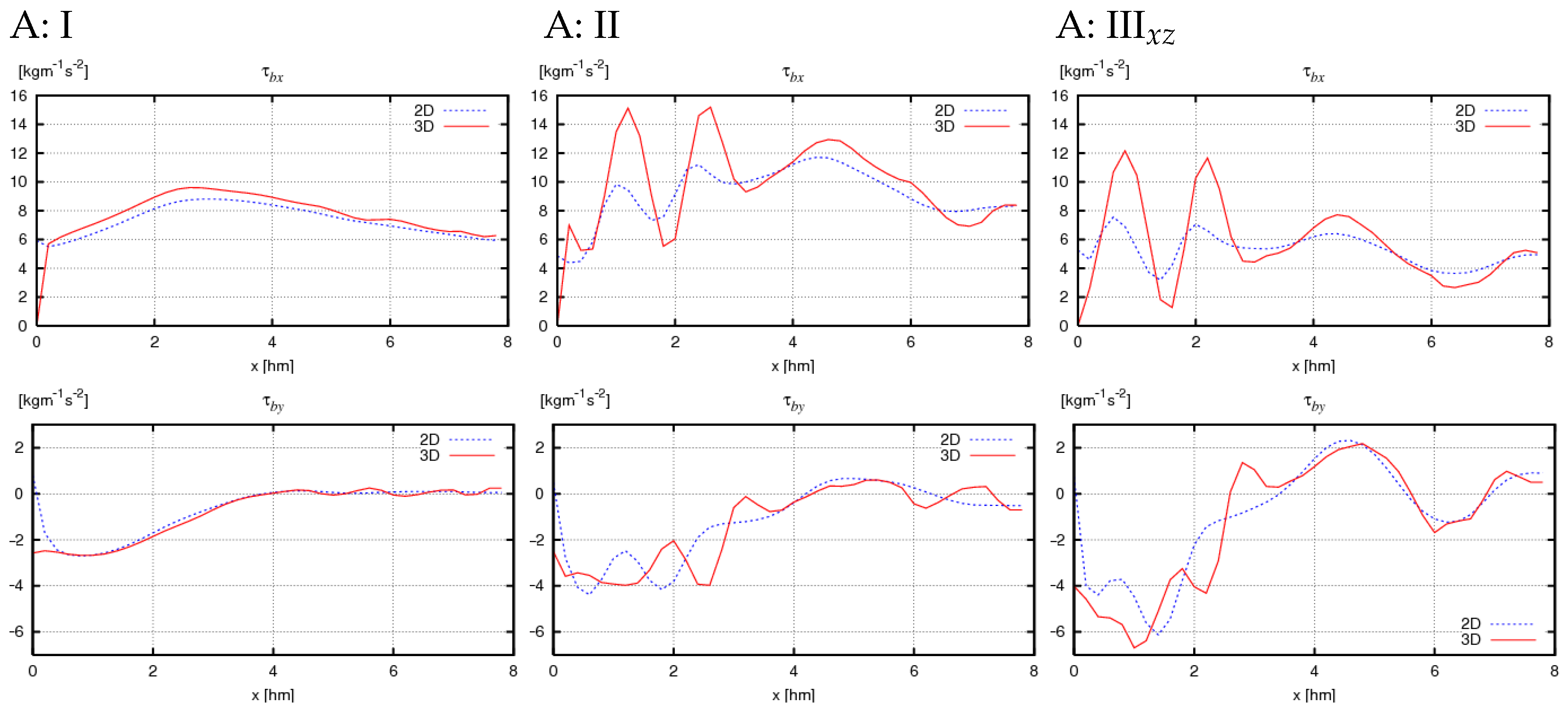
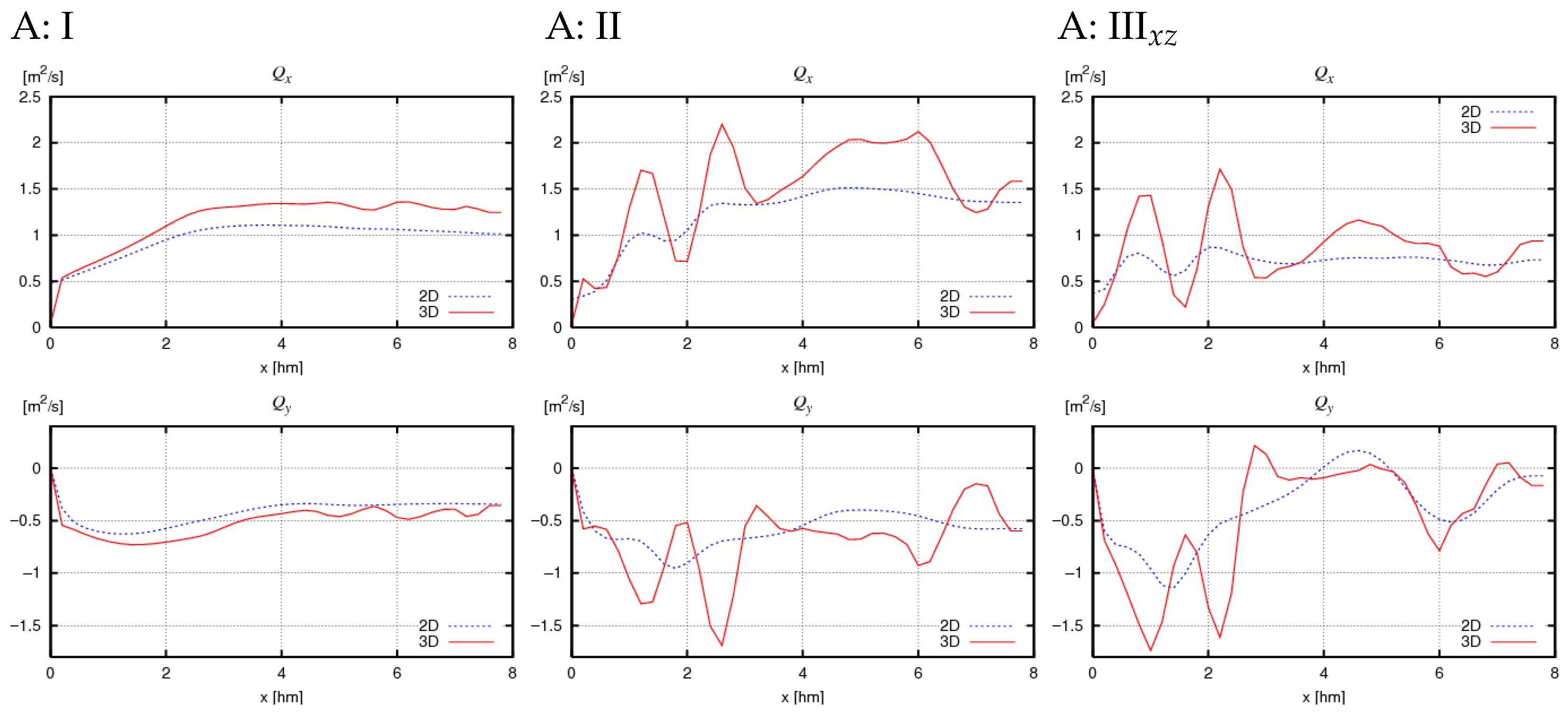
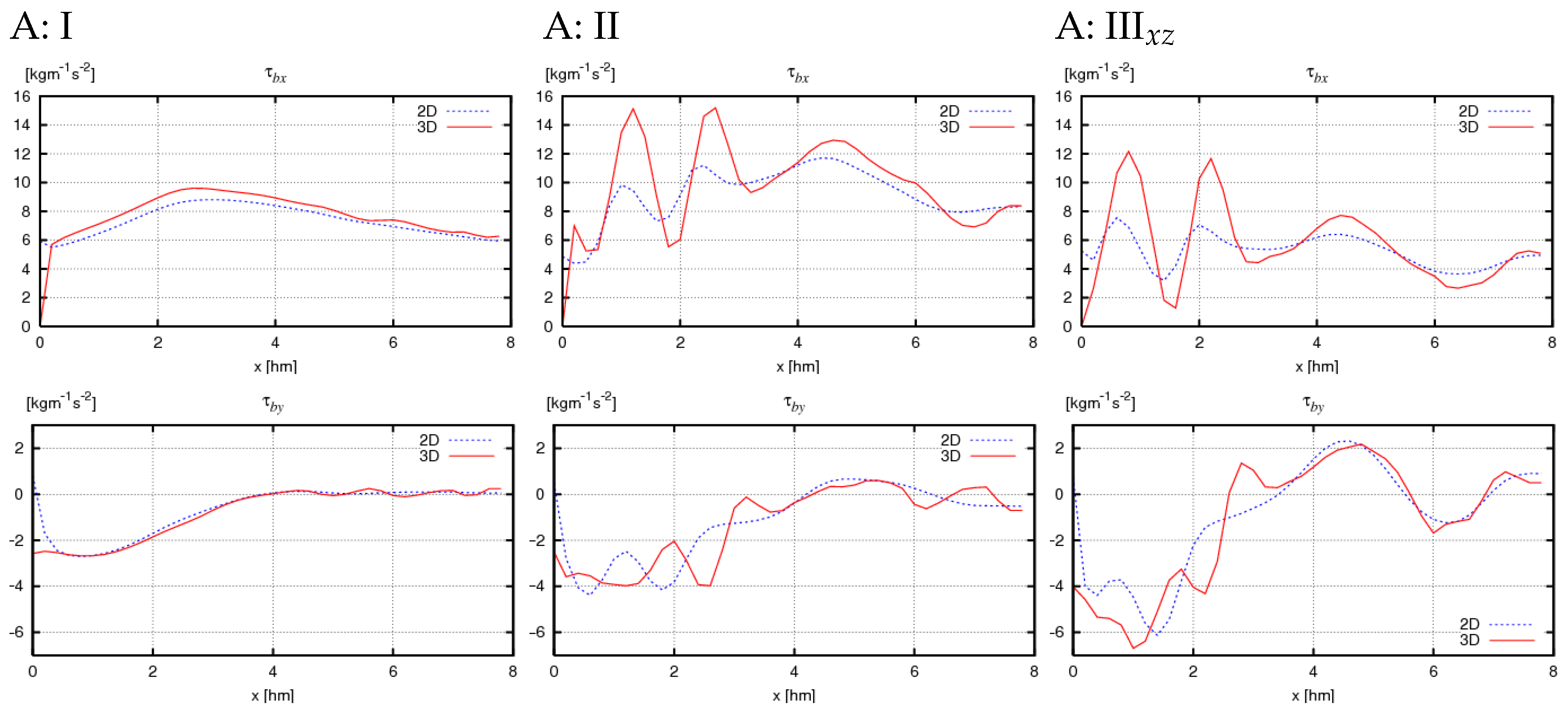
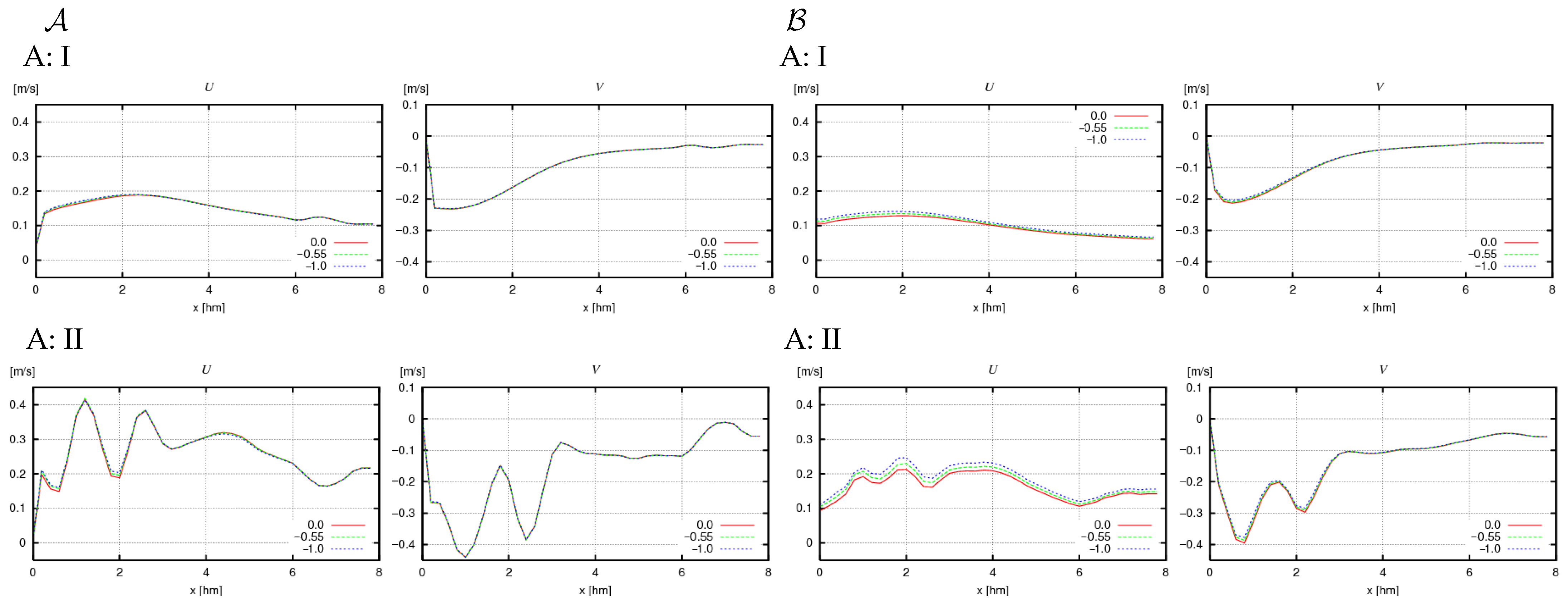
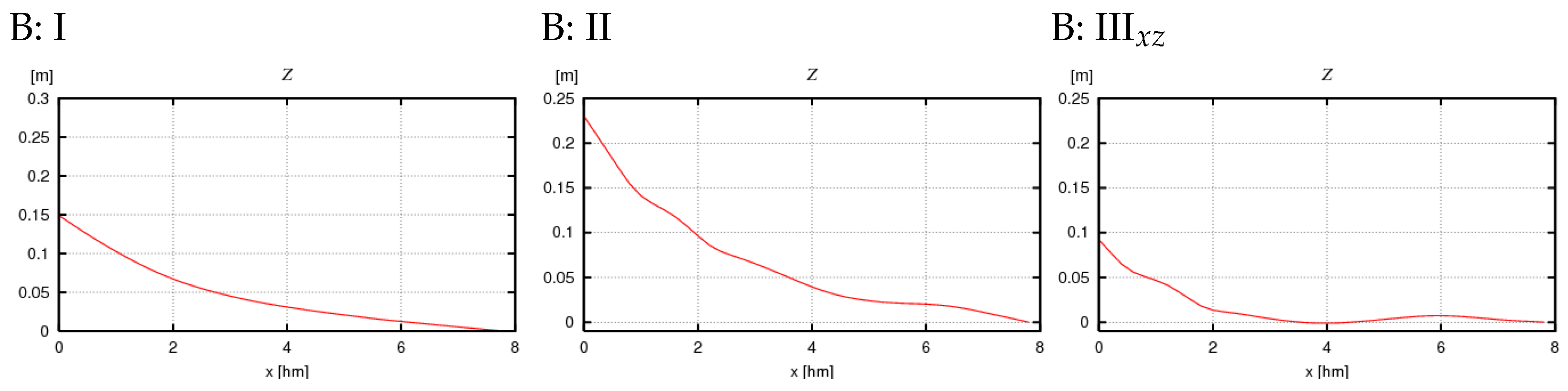
- In the simplest theoretical case (I), the greatest consistency is achieved between the results of the 2D and 3D model equations (values of and , see Figure 12, Figure 13, Figure 14 and Figure 15: I). Simultaneously, in this case, as expected, very similar values are obtained for calculations of types and , which utilize analytical solutions for general and specific conditions, respectively (Figure 16 and Figure 17: I).
- Increasing the complexity of the bathymetric profile as a function of distance from the shore, while maintaining alongshore homogeneity (case II), results in increased differences between the 2D and 3D model results and a significant increase in all computed quantities (, , Z, , Figure 12, Figure 13, Figure 14, Figure 15, Figure 16 and Figure 17: II) relative to case I. Both factors appear to be due to greater variability of wave data in the cross-shore profile while maintaining their variability limits, leading to larger values of derivatives . The discrepancy between the 2D and 3D values for case II arises from the assumptions of both models and may indicate that the 2D model is less sensitive to cross-shore variability, leading to some underestimation of and in coastal zones with real, multi-bar bathymetric profiles and isobaths parallel to the shoreline. The velocity differences obtained for case II from calculations and (Figure 16 and Figure 17: II) are small (especially in the alongshore component) but noticeably larger than in case I. The results obtained from the analytical solution for specific conditions tend to be lower than those for general conditions.
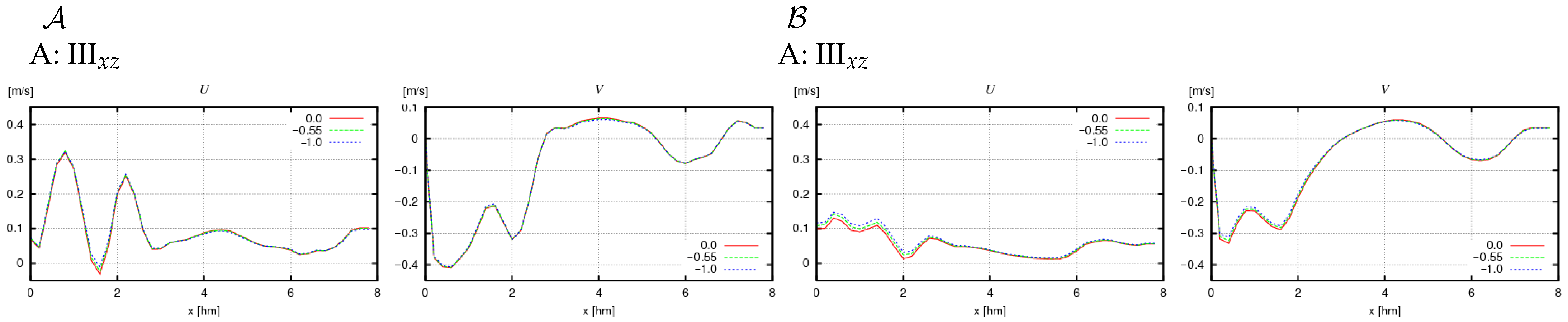
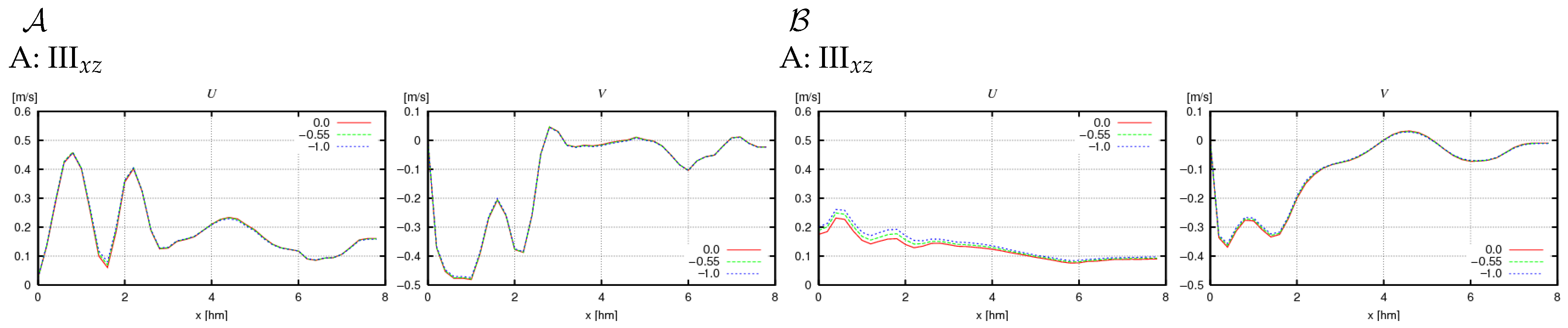
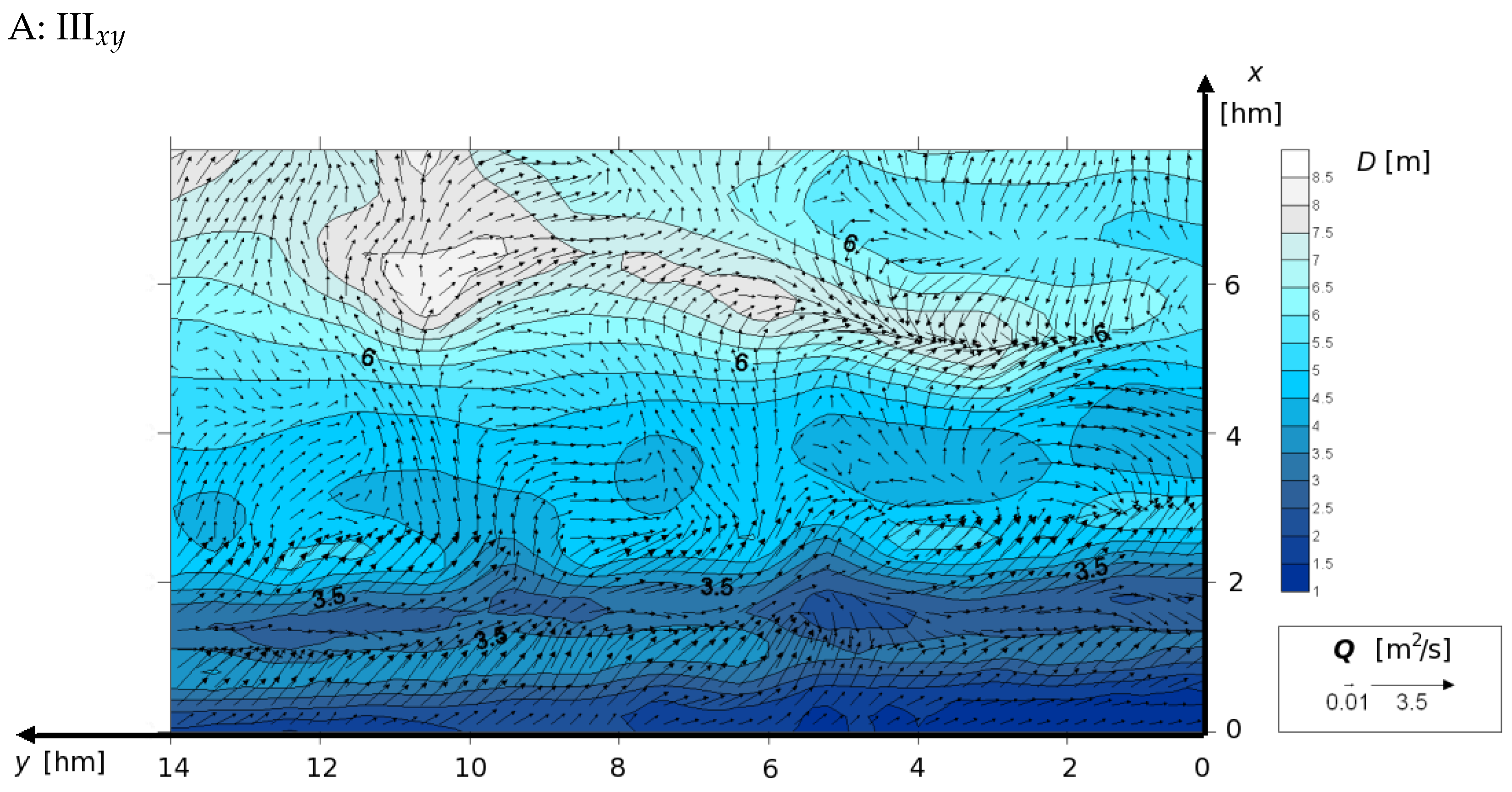
- The presence of nonzero derivatives with respect to the y coordinate in the real case (III) significantly modifies the obtained cross-shore profiles compared to case II. This primarily concerns the change in direction of the alongshore components of volumetric current transport (Figure 12 and Figure 14: IIIxz), bottom friction (Figure 13 and Figure 15: IIIxz), and velocity (Figure 18 and Figure 19), as well as the values of free surface elevation (Figure 20 and Figure 21: IIIxz). The differences between the values obtained using the 2D and 3D model equations are similar to those observed in case II. The velocity results obtained from calculations and can be used as a preliminary assessment of the influence of the derivative on the velocity values (since it is not included in ).
5. Conclusions
Critical Assumptions and Recommendations for Future Work
- Linear wave theory and omission of the surf-zone roller. By using Airy theory and neglecting roller dynamics, non-linear wave breaking effects and short-wave energy fluxes are only crudely represented. Future studies should evaluate the sensitivity of nearshore currents to higher-order wave kinematics and explicit roller models.
- Turbulence closure. The zero-equation eddy-viscosity approach, with constant coefficients and , enforces a fixed vertical mixing structure. It will be important to compare against the more advanced two-equation or Reynolds-stress closures, especially under energetic, barred profiles.
- Bottom stress formulation. We employed a linearized tensorial form valid for weak currents. Extensions to fully quadratic, direction-dependent drag laws should be tested in strong flood–ebb and oblique wave conditions.
Funding
Data Availability Statement
Conflicts of Interest
References
- Gic-Grusza, G. The Three-Dimensional Wave-Induced Current Field: An Analytical Model. Water 2024, 16, 1165. [Google Scholar] [CrossRef]
- Hill, C.; Marshall, J. Application of a Parallel Navier-Stokes Model to Ocean Circulation in Parallel Computational Fluid Dynamics. In Parallel Computational Fluid Dynamics: Implementations and Results Using Parallel Computers; Elsevier Science B.V.: New York, NY, USA, 1995; pp. 545–552. [Google Scholar]
- Blumberg, A.F.; Mellor, G.L. A description of a three-dimensional coastal ocean circulation model. In Three Dimensional Coastal Ocean Models 4; Heaps, N., Ed.; American Geophysical Union: Washington, DC, USA, 1987; pp. 1–16. [Google Scholar]
- Shchepetkin, A.F.; McWilliams, J.C. The Regional Oceanic Modeling System (ROMS): A split-explicit, free-surface, topography-following-coordinate oceanic model. Ocean Model. 2005, 9, 347–404. [Google Scholar] [CrossRef]
- Booij, N.; Holthuijsen, L.H.; Ris, R.C. A third-generation wave modelfor coastal regions. J. Geophys. Res. 1999, 104, 7649–7666. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. Longshore currents generated by obliquely incident sea waves (1). J. Geophys. Res. 1970, 75, 6778–6789. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. Longshore currents generated by obliquely incident sea waves (2). J. Geophys. Res. 1970, 75, 6790–6801. [Google Scholar] [CrossRef]
- De Vriend, H.J.; Stive, M.J.F. Quasi-3d modelling of nearshore currents. Coast. Eng. 1987, 11, 565–601. [Google Scholar] [CrossRef]
- Sánchez-Arcilla, A.; Collado, F.; Lemos, M.; Rivero, F. Another quasi-3d model for surf-zone flows. In Proceedings of the 22nd International Conference on Coastal Engineering, ASCE, Delft, The Netherlands, 2–6 July 1990; pp. 316–329. [Google Scholar]
- Garcez-Faria, A.F.; Thornton, E.B.; Stanton, T. A quasi-3d model of longshore currents. In Proceedings of the Coastal Dynamics’95—International Conference of Coastal Research in terms of large scale experiments, ASCE, Gdansk, Poland, 4–8 September 1995; pp. 389–400. [Google Scholar]
- Nobuoka, H.; Mimura, N.; Kato, H. Three-dimensional nearshore currents model based on vertical distribution of radiation stress. In Proceedings of the 26th International Conference on Coastal Engineering, ASCE, Copenhagen, Denmark, 22–26 June 1998; pp. 829–842. [Google Scholar]
- Mellor, G.L. The three-dimensional current and surface wave equations. J. Phys. Oceanogr. 2003, 33, 1978–1989. [Google Scholar] [CrossRef]
- Mellor, G.L. Some consequences of the three-dimensional currents and surface wave equations. J. Phys. Oceanogr. 2005, 35, 2291–2298. [Google Scholar] [CrossRef]
- Mellor, G.L. The depth-dependent current and wave interaction equations: A revision. Phys. Oceanogr. 2008, 38, 2587–2596. [Google Scholar] [CrossRef]
- Kumar, N.; Voulgaris, G.; Warner, J.C. Implementation and modification of a three-dimensional radiation stress formulation for surf zone and rip-current applications. Coast. Eng. 2011, 58, 1097–1117. [Google Scholar] [CrossRef]
- Chou, Y.-J.; Holleman, R.C.; Fringer, O.B.; Stacey, M.T.; Monismith, S.G.; Koseff, J.R. Three-dimensional wave-coupled hydrodynamics modeling in South San Francisco Bay. Comput. Geosci. 2015, 85, 10–21. [Google Scholar] [CrossRef]
- Marin, F.; Vah, M. Cross-Shore Sediment Transport in the Coastal Zone: A Review. Water 2024, 16, 957. [Google Scholar] [CrossRef]
- Ranasinghe, R.S. Modelling of waves and wave-induced currents in the vicinity of submerged structures under regular waves using nonlinear wave-current models. Ocean Eng. 2022, 247, 110707. [Google Scholar] [CrossRef]
- Tang, S.; Yang, Y.; Zhu, L. Directing Shallow-Water Waves Using Fixed Varying Bathymetry Designed by Recurrent Neural Networks. Water 2023, 15, 2414. [Google Scholar] [CrossRef]
- Xia, H.; Xia, Z.; Zhu, L. Vertical variation in radiation stress and wave-induced current. Coast. Eng. 2004, 51, 309–321. [Google Scholar] [CrossRef]
- Kołodko, J.; Gic-Grusza, G. A note on the vertical distribution of momentum transport in water waves. Oceanol. Hydrobiol. Stud. 2015, 44, 563–568. [Google Scholar] [CrossRef]
- Mellor, G.L. On theories dealing with the interaction of surface waves and ocean circulation. J. Geophys. Res. Oceans 2016, 121, 4474–4486. [Google Scholar] [CrossRef]
- Svendsen, I.A.; Putrevu, U. Surf-zone hydrodynamics. In Advances in Coastal and Ocean Engineering; Liu, P.L., Ed.; World Scientific: Singapore, 1996; pp. 1–78. [Google Scholar]
- Rivero, F.J.; Arcilla, A.S. On the vertical distribution of . Coast. Eng. 1995, 25, 137–152. [Google Scholar] [CrossRef]
- Svendsen, I.A. Wave heights and set-up in a surf zone. Coast. Eng. 1984, 8, 303–329. [Google Scholar] [CrossRef]
- Svendsen, I.A.; Lorenz, R.S. Velocities in combined undertow and longshore currents. Coast. Eng. 1989, 13, 55–79. [Google Scholar] [CrossRef]
- Bradford, S.F. Numerical simulation of surf zone dynamics. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 1–13. [Google Scholar] [CrossRef]
- Marino, M.; Faraci, C.; Jensen, B.; Musumeci, R.E. Turbulent features of nearshore wave–current flow. Ocean Sci. 2024, 20, 1479–1493. [Google Scholar] [CrossRef]
- Peruzzi, C.; Vettori, D.; Poggi, D.; Blondeaux, P.; Ridolfi, L.; Manes, C. On the influence of collinear surface waves on turbulence in smooth-bed open-channel flows. J. Fluid Mech. 2021, 924, A6. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S.; Stewart, R.W. Radiation stress in water waves; a physical discussion with applications. Deep-Sea Res. 1964, 11, 529–562. [Google Scholar]
- Liu, C.; Clark, A. Analysing the impact of bottom friction on shallow water waves over idealised bottom topographies. Geophys. Astrophys. Fluid Dyn. 2023, 117, 107–129. [Google Scholar] [CrossRef]
- Jonsson, I.G. Wave boundary layers and friction factors. In Proceedings of the 10th International Conference on Coastal Engineering, ASCE, Tokyo, Japan, 5–8 September 1966; pp. 127–148. [Google Scholar]
- Whitford, D.J.; Thornton, E.B. Bed shear stress coefficients for longshore currents over a barred profile. Coast. Eng. 1996, 27, 243–262. [Google Scholar] [CrossRef]
- Kołodko, J. The Tensorial Nature of Bottom Friction in the Coastal Zone of the Sea; Institute of Hydro-Engineering of the Polish Academy of Sciences: Gdańsk, Poland, 1999; internal materials. [Google Scholar]
- Svendsen, I.A.; Putrevu, U. Nearshore circulation with 3-D profiles. In Proceedings of the 22nd International Conference on Coastal Engineering, ASCE, Delft, The Netherlands, 2–6 July 1990; pp. 241–254. [Google Scholar]
- Elsner, J.W. Turbulencja przepływów; Państwowe Wydawnictwo Naukowe PWN: Warszawa, Poland, 1987. (In Polish) [Google Scholar]
- Lozier, M.; Deshpande, R.; Zarei, A.; Lindic, L.; Abu Rowin, W.; Marusic, I. Defining the mean turbulent boundary layer thickness based on streamwise velocity skewness. arXiv 2025, arXiv:2502.00157. [Google Scholar]
- Svendsen, I.A.; Buhr-Hansen, J. Cros-shore currents in surf zone modelling. Coast. Eng. 1987, 12, 23–42. [Google Scholar] [CrossRef]
- Middlecoff, J.; Yu, Y.; Govett, M. Performance comparison of the A-grid and C-grid shallow-water models on icosahedral grids. Int. J. High Perform. Comput. Appl. 2022, 37, 197–208. [Google Scholar] [CrossRef]
- Brodeau, L.; Rampal, P.; Olason, E.; Dansereau, V. Implementation of a brittle sea ice rheology in an Eulerian, finite-difference, C-grid modeling framework: Impact on the simulated deformation of sea ice in the Arctic. Geosci. Model Dev. 2024, 17, 6051–6082. [Google Scholar] [CrossRef]
- Gilbert, R.P.; Guyenne, P.; Li, J. Simulation of a mixture model for ultrasound propagation through cancellous bone using staggered-grid finite differences. J. Comput. Acoust. 2013, 21, 1250017. [Google Scholar] [CrossRef]
- Li, Y.; Wang, D.; Wang, B. A New Approach to Implement Sigma Coordinate in a Numerical Model. Commun. Comput. Phys. 2012, 12, 1033–1050. [Google Scholar] [CrossRef]
- Dudkowska, A.; Boruń, A.; Malicki, J.; Schönhofer, J.; Gic-Grusza, G. Rip currents in the non-tidal surf zone withsandbars: Numerical analysis versus field measurements. Oceanologia 2020, 62, 291–308. [Google Scholar] [CrossRef]
- Halicki, A.; Dudkowska, A.; Gic-Grusza, G. Short-term wave forecasting for offshore wind energy in the Baltic Sea. Ocean Eng. 2025, 315, 119700. [Google Scholar] [CrossRef]
- Ostrowski, R.; Pruszak, Z.; Różyński, G.; Szmytkiewicz, M.; Pham Van Ninh, P.; Do Ngoc Quynh, D.; Nguyen Thi Viet Lien, N. Coastal Processes at Selected Shore Segments of South Baltic Sea and Gulf of Tonkin (South China Sea). Arch. Hydro-Eng. Environ. 2009, 56, 3–28. [Google Scholar]
- Ostrowski, R.; Pruszak, Z.; Skaja, M.; Szmytkiewicz, M.; Trifonova, E.; Keremedchiev, S. Hydrodynamics and lithodynamics of dissipative and reflective shores in view of field investigations. Arch. Hydro-Eng. Environ. 2010, 57, 219–241. [Google Scholar]
- Mendes, S. A continuous non-ergodic theory for the wave set-up. Eur. J. Mech. B Fluids 2024, 106, 78–88. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| H [m] | T [s] | [°] | |
|---|---|---|---|
| A | 2.54 | 6.40 | 253.13 |
| B | 1.75 | 6.20 | 233.44 |
| C | 2.64 | 5.33 | 156.00 |
| D | 2.42 | 5.26 | 208.41 |
| E | 1.80 | 4.88 | 202.99 |
| F | 1.32 | 3.96 | 183.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gic-Grusza, G. Numerical Modeling of the Three-Dimensional Wave-Induced Current Field. Water 2025, 17, 1336. https://doi.org/10.3390/w17091336
Gic-Grusza G. Numerical Modeling of the Three-Dimensional Wave-Induced Current Field. Water. 2025; 17(9):1336. https://doi.org/10.3390/w17091336
Chicago/Turabian StyleGic-Grusza, Gabriela. 2025. "Numerical Modeling of the Three-Dimensional Wave-Induced Current Field" Water 17, no. 9: 1336. https://doi.org/10.3390/w17091336
APA StyleGic-Grusza, G. (2025). Numerical Modeling of the Three-Dimensional Wave-Induced Current Field. Water, 17(9), 1336. https://doi.org/10.3390/w17091336