
Experimental Study on the Motion Response Characteristics of a Floating Wind Turbine with a Semi-Submersible Foundation



Abstract
1. Introduction
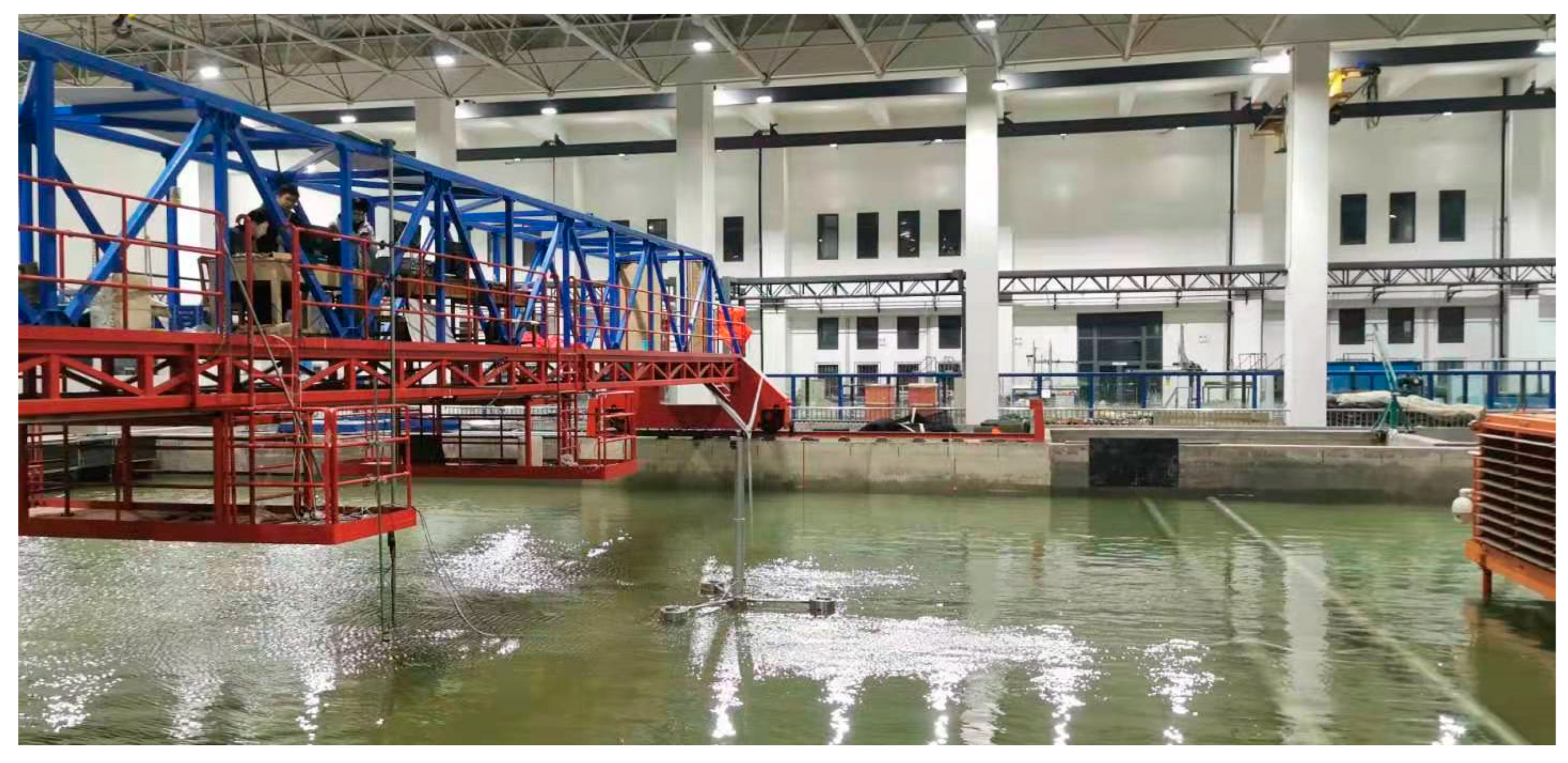
2. Test Method and Condition Parameters
3. Results and Discussion
3.1. The Dynamic Responses of the Floating Wind Turbine Under Different Conditions
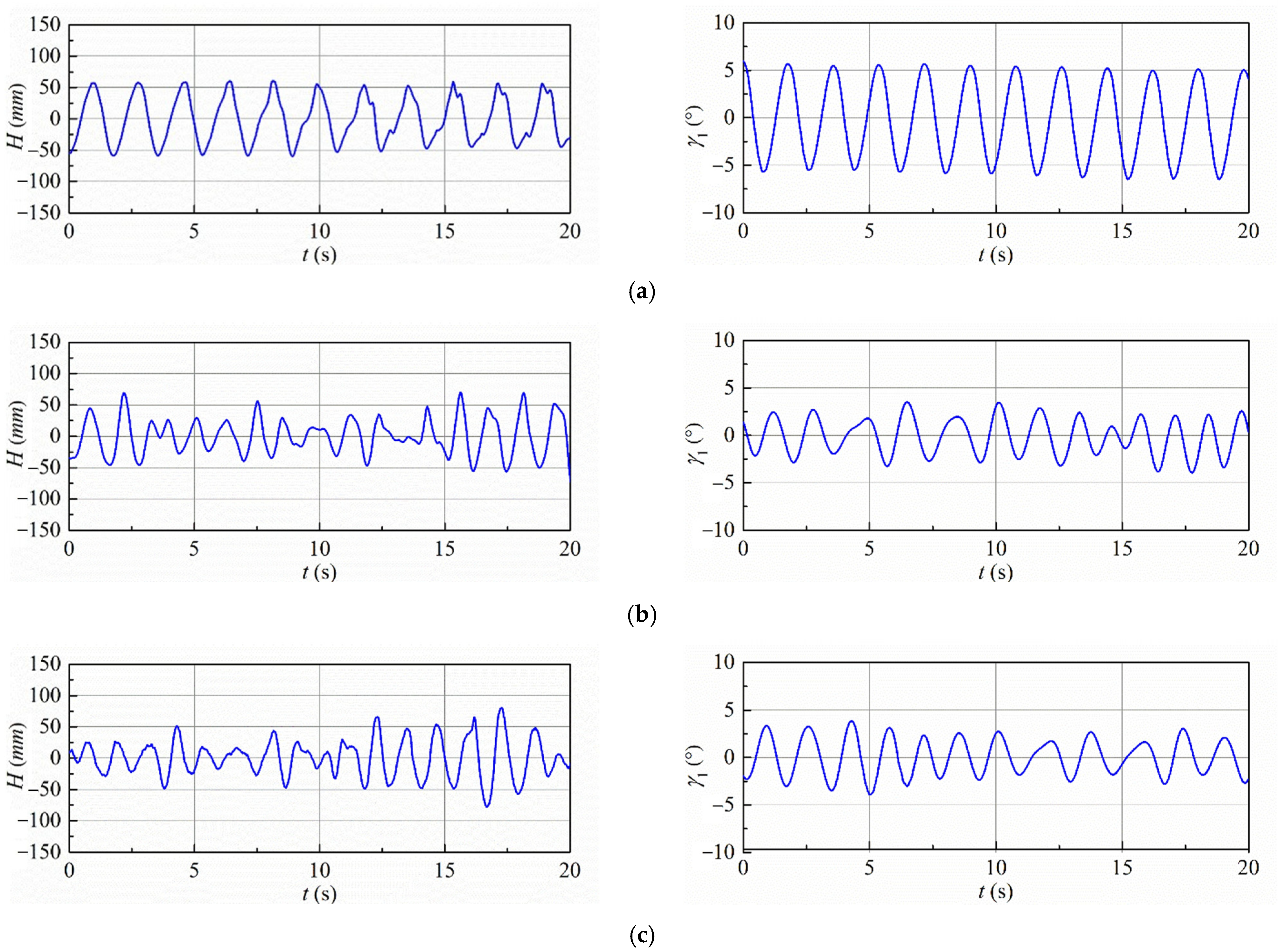
3.1.1. Time Histories of the Incident Waves and Responses
3.1.2. Response Amplitude Under Different Conditions




3.2. Effect of Main Parameters on Dynamic Response
3.2.1. Effect of Mooring Method

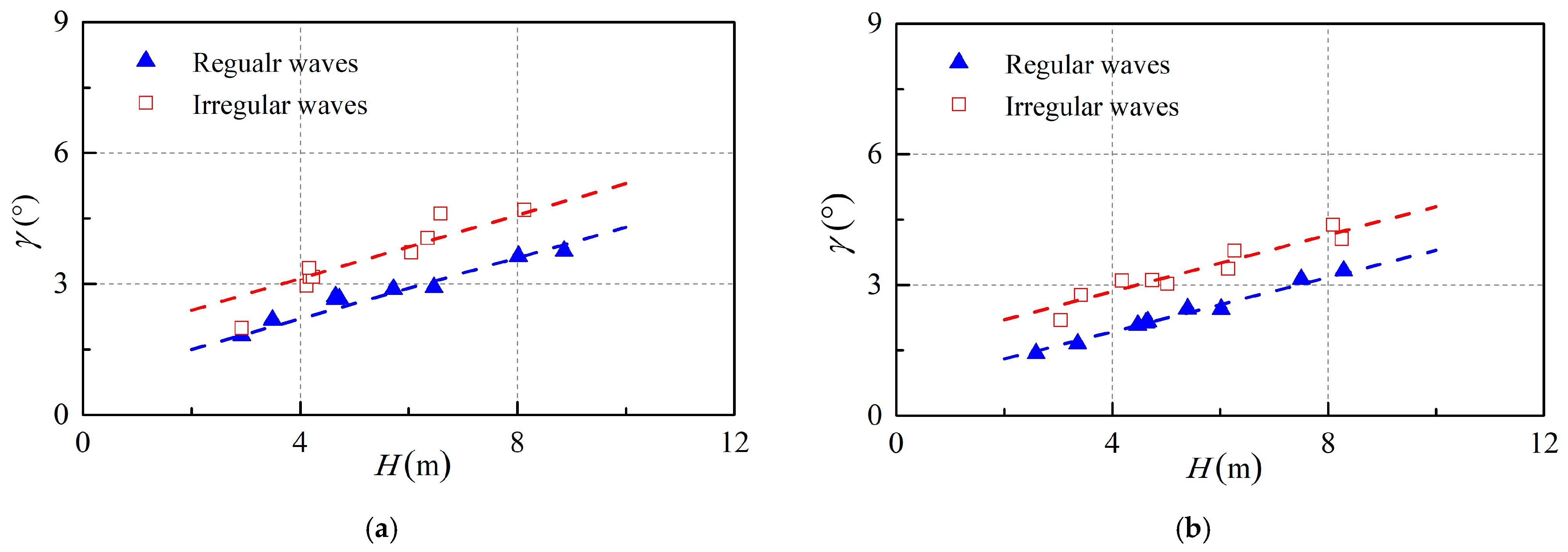
3.2.2. Effect of Regular and Irregular Waves
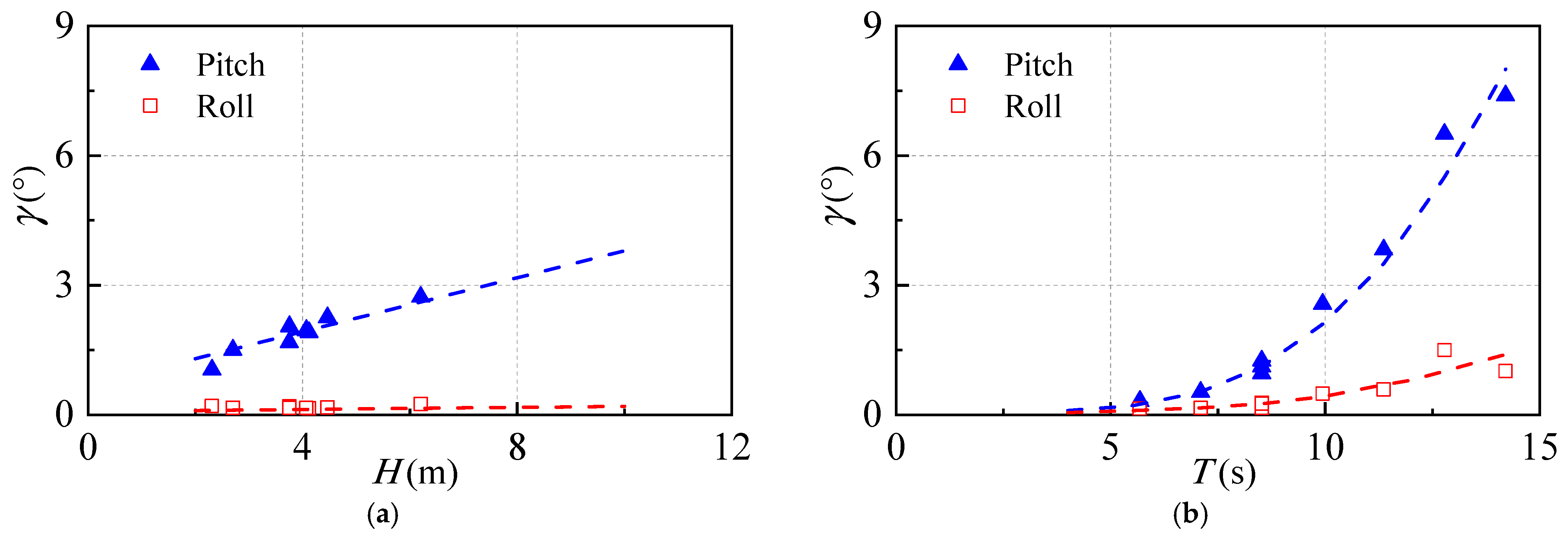
3.2.3. Effect of Wave Period

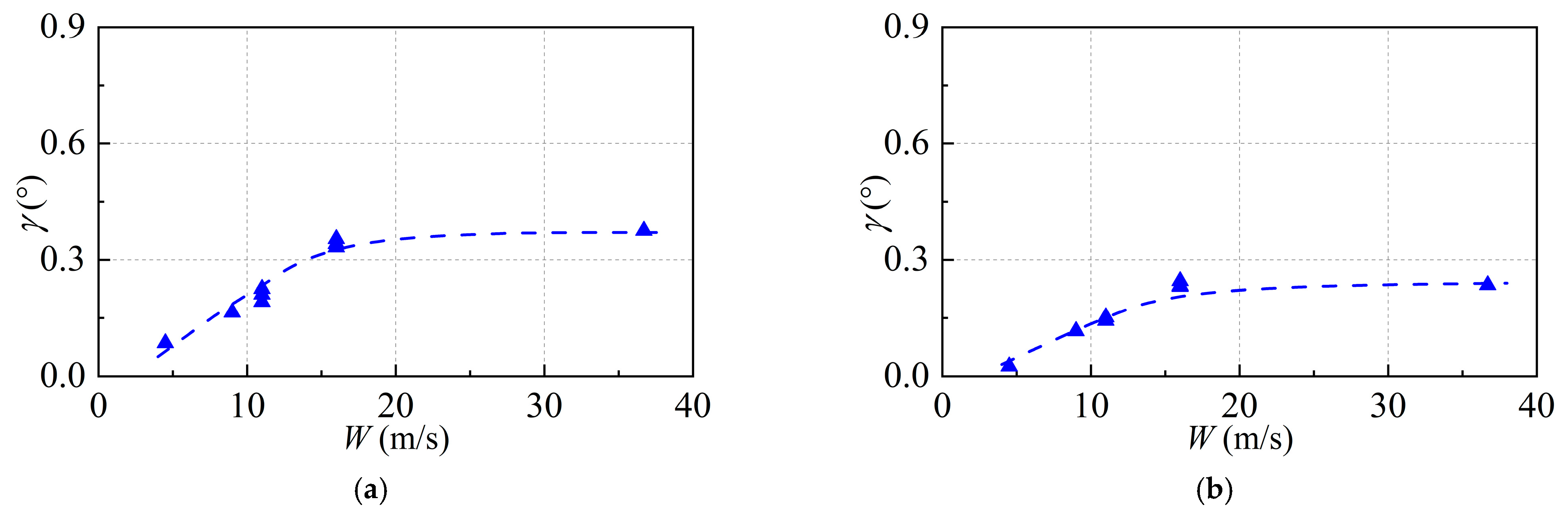
3.2.4. Effect of Superimposition of Wind

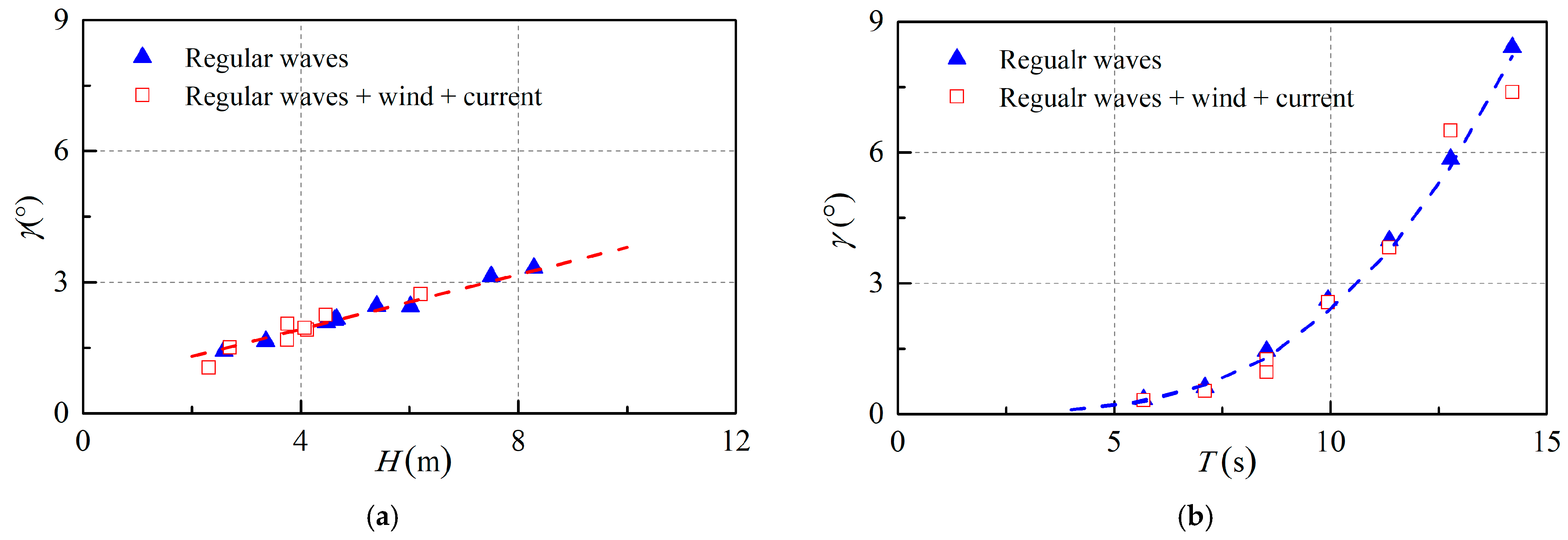
3.2.5. Effect of Superimposition of Wind and Current
4. Conclusions
- (1)
- A comparative analysis of mooring techniques demonstrated that employing three mooring lines attached to the three surrounding floating cylinders, rather than a single mooring line connected to the central floating cylinder, significantly reduces the pitch response amplitude of the floating wind turbine.
- (2)
- The floating wind turbine demonstrates a steady inclination when subjected to wind-only conditions. Nevertheless, this inclination angle remains notably minimal, with a maximum value not exceeding 0.3° under the maximum design wind load.
- (3)
- Within the examined range of wave periods, the amplitude of the pitch response exhibits an increasing trend without reaching a peak value. This observation suggests that the natural period of the floating wind turbine is intentionally designed to be distinct from the most frequently occurring wave conditions in actual marine environments. Under a one-year wave load, characterized by a significant wave height (Hs) of 5.51 m and a peak wave period (Tp) of 9.0 s, the pitch response amplitude is approximately 4°. Conversely, under a fifty-year wave load with Hs = 12 m and Tp = 12.7 s, the pitch response amplitude increases to 7°. Both amplitudes remain within the standard inclination angle limit of 10° for a floating wind turbine.
- (4)
- When wave and wind loads are combined, the resulting pitch response amplitude of the floating wind turbine is marginally diminished compared to the amplitude generated by wave load alone. This phenomenon is predominantly due to the increased spring constant of the mooring lines, which is caused by the steady drift of the floating wind turbine towards the leeside under the influence of wind.
- (5)
- When wave, current, and wind loads are combined, the pitch response amplitude of a floating wind turbine closely approximates that induced by wave loads alone. The wind load predominantly affects the system through the rotor and tower, whereas the current load influences the system via the platform and mooring lines. The wind and current loads exhibit an inverse relationship with respect to the center of inertia concerning the pitch response, thereby allowing the current load to counterbalance the wind load. Simultaneously, the mooring lines experience increased tension due to the steady drift induced by wind and current, which subsequently enhances the spring constant. These enhancements contribute to the attenuation of system vibrations to a certain extent.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Y.; Li, S.; Yi, Q.; Chen, D. Developments in semi-submersible floating foundations supporting wind turbines: A comprehensive review. Renew. Sus. Energ. Rev. 2016, 60, 433–449. [Google Scholar] [CrossRef]
- Casale, C.; Lembo, E.; Serri, L.; Viani, S. Preliminary design of a floating wind turbine support structure and relevant system cost assessment. Wind Eng. 2010, 34, 29–50. [Google Scholar] [CrossRef]
- Huijs, F.; Bruijn, R.; Savenije, F. Concept design verification of a semi-submersible floating wind turbine using coupled simulations. Energy Procedia 2014, 53, 2–12. [Google Scholar] [CrossRef]
- Collu, M.; Maggi, A.; Gualeni, P.; Rizzo, C.M.; Brennan, F. Stability requirements for floating offshore wind turbine (FOWT) during assembly and temporary phases: Overview and application. Ocean Eng. 2014, 84, 164–175. [Google Scholar] [CrossRef]
- Yao, Y.; Mayon, R.; Zhou, Y.; Zhu, Y.; Ning, D. Integrated system of semi-submersible offshore wind turbine foundation and porous phells. J. Mar. Sci. Appl. 2024, 23, 491–505. [Google Scholar] [CrossRef]
- Pan, Q.; Wang, X.; Li, S.; Zhang, L.; Zhou, X. Multi-objective design and optimization method for semi-submersible wind turbine considering stability constraints. Ocean Eng. 2025, 321, 120350. [Google Scholar] [CrossRef]
- Chakrabarti, S.; Barnett, J.; Kanchi, H.; Mehta, A.; Yim, J. Design analysis of a truss pontoon semi-submersible concept in deep water. Ocean Eng. 2007, 34, 621–629. [Google Scholar] [CrossRef]
- Cao, Q.; Xiao, L.; Cheng, Z.; Liu, M.; Wen, B. Operational and extreme responses of a new concept of 10 MW semi-submersible wind turbine in intermediate water depth: An experimental study. Ocean Eng. 2020, 217, 108003. [Google Scholar] [CrossRef]
- Li, Q.; Gao, Z.; Moan, T. Modified environmental contour method to determine the long-term extreme responses of a semi-submersible wind turbine. Ocean Eng. 2017, 142, 563–576. [Google Scholar] [CrossRef]
- Chen, J.; Hu, Z.; Liu, G.; Wan, D. Coupled aero-hydro-servo-elastic methods for floating wind turbines. Renew. Energ. 2019, 130, 139–153. [Google Scholar] [CrossRef]
- Cheng, P.; Huang, Y.; Wan, D. A numerical model for fully coupled aero-hydrodynamic analysis of floating offshore wind turbine. Ocean Eng. 2019, 173, 183–196. [Google Scholar] [CrossRef]
- Raed, K.; Teixeira, A.P.; Guedes Soares, C. Uncertainty assessment for the extreme hydrodynamic responses of a wind turbine semi-submersible platform using different environmental contour approaches. Ocean Eng. 2020, 195, 106719. [Google Scholar] [CrossRef]
- Li, H.; Zheng, J.; Zhang, J.; Peng, W.; Peng, J. Numerical investigation on dynamic responses of a semi-submersible wind turbine with different types of heave plates. Ocean Eng. 2024, 310, 118650. [Google Scholar] [CrossRef]
- Wang, B.; Gao, X.; Li, Y.; Liu, L.; Li, H. Dynamic response analysis of a semi-submersible floating wind turbine based on different coupling methods. Ocean Eng. 2024, 297, 116948. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, T.; Yang, Q.; Wei, K.; Zhang, Z. Hydrodynamic model for a semi-submersible wind turbine platform with effects of ocean currents. Ocean Eng. 2024, 313, 119517. [Google Scholar] [CrossRef]
- Hu, Z.; Jin, J.; Chen, P.; Cheng, Z.; Gao, Z. Numerical modelling and dynamic response analysis of dockside installation of a semi-submersible floating wind turbine considering multi-stage typhoon. Ocean Eng. 2025, 325, 120751. [Google Scholar] [CrossRef]
- Lopez-Pavon, C.; Souto-Iglesias, A. Hydrodynamic coefficients and pressure loads on heave plates for semi-submersible floating offshore wind turbines: A comparative analysis using large scale models. Renew. Energ. 2015, 81, 864–881. [Google Scholar] [CrossRef]
- Liu, J.; Thomas, E.; Goyal, A.; Manuel, L. Design loads for a large wind turbine supported by a semi-submersible floating platform. Renew. Energ. 2019, 138, 923–936. [Google Scholar] [CrossRef]
- Stansby, P.K.; Moreno, E.C.; Apsley, D.D.; Stallard, T.J. Slack-moored semi-submersible wind floater with damping plates in waves: Linear diffraction modelling with mean forces and experiments. J. Fluids Struc. 2019, 90, 410–431. [Google Scholar] [CrossRef]
- Payenda, M.A.; Wang, S.; Jiang, Z.; Prinz, Z. Prediction of mooring dynamics for a semi-submersible floating wind turbine with recurrent neural network models. Ocean Eng. 2024, 313, 119490. [Google Scholar] [CrossRef]
- Bertozzi, A.; Niosi, F.; Jiang, X.; Jiang, Z. Numerical calibration of the mooring System for a semi-submersible floating wind turbine model. J. Offshore Mech. Arct. Eng. 2024, 146, 062001. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, P.; Wang, S.; Cheng, Z.; Xiao, L. Dynamic responses of a 5 MW semi-submersible floating vertical-axis wind turbine: A model test study in the wave basin. Ocean Eng. 2024, 296, 117000. [Google Scholar] [CrossRef]
- Bai, H.; Xu, K.; Zhang, M.; Yuan, W.; Jin, R.; Li, W.; Gao, S.; Li, H. Theoretical and experimental study of the high-frequency nonlinear dynamic response of a 10MWsemi-submersible floating offshore wind turbine. Renew. Energ. 2024, 231, 120952. [Google Scholar] [CrossRef]
- Guo, J.; Liu, M.; Fang, Z.; Chen, W.; Pan, X.; Yang, J. An experimental study on the influence of wind-wave-current coupling effect on the global performance of a 12 MW semi-submersible floating wind turbine. Ocean Eng. 2024, 304, 117795. [Google Scholar] [CrossRef]
- Zhao, Z.; Chang, S.; Li, X.; Liu, F. Experimental study on dynamic responses of a new semi-submersible supporting platform concept for 10 MW wind turbines. Ocean Eng. 2025, 318, 120168. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable Name | Relationship Between Prototype and Model | Conversion Coefficient |
|---|---|---|
| Length (m) | Lp/Lm | λ |
| Speed (m/s) | Vp/Vm | λ1/2 |
| Period (s) | Tp/Tm | λ1/2 |
| Force (N) | Fp/Fm | λ3 |
| Stiffness (N·m2) | (EI)p/(EI)m | λ5 |
| Component and Total Dimensions | Prototype Values | Model Values |
|---|---|---|
| Diameter of surrounding cylinder R1 (m) | 14.0 | 0.28 |
| Height of surrounding cylinder l1 (m) | 20.0 | 0.40 |
| Draft of surrounding cylinder d1 (m) | 15.0 | 0.30 |
| Diameter of central cylinder R2 (m) | 10.0 | 0.20 |
| Height of central cylinder l2 (m) | 15.0 | 0.30 |
| Draft of central cylinder d2 (m) | 10.0 | 0.20 |
| Diameter of lower tube r1 (m) | 6.50 | 0.13 |
| Height of lower tube b1 (m) | 40.0 | 0.80 |
| Diameter of upper tube r1 (m) | 5.50 | 0.11 |
| Height of upper tube b2 (m) | 45.0 | 0.90 |
| Length of wind blade L1 (m) | 65.0 | 1.30 |
| Length of floating foundation L (m) | 78.0 | 2.60 |
| Diameter of rod d (m) | 1.50 | 0.04 |
| Component and Total Mass | Prototype Values | Model Values |
|---|---|---|
| Mass of tower tube (t) | 8.09 × 102 | 6.16 × 10−3 |
| Mass of wind turbine (t) | 3.52 × 102 | 2.32 × 10−3 |
| Mass of surrounding cylinder (t) | 3.55 × 103 | 3.78 × 10−2 |
| Mass of central cylinder (t) | 5.75 × 102 | 5.94 × 10−3 |
| Mass of connecting rod (t) | 2.61 × 103 | 9.70 × 10−3 |
| Total mass (t) | 7.85 × 103 | 6.20 × 10−2 |
| Environmental Conditions | Prototype Values | Model Values |
|---|---|---|
| Water depth d (m) | 40.0 | 0.8 |
| Significant wave H (m) | 1.0~10.5 | 0.02~0.21 |
| Wave period T (s) | 5.6~14.5 | 0.8~2.0 |
| Current speed U (m/s) | 0.96 | 0.14 |
| Wind speed W (m/s) | 11.0~36.0 | 0.5~2.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zang, Z.; Zong, H.; Fang, Z.; Zhang, J.; Hu, C. Experimental Study on the Motion Response Characteristics of a Floating Wind Turbine with a Semi-Submersible Foundation. Water 2025, 17, 1501. https://doi.org/10.3390/w17101501
Zang Z, Zong H, Fang Z, Zhang J, Hu C. Experimental Study on the Motion Response Characteristics of a Floating Wind Turbine with a Semi-Submersible Foundation. Water. 2025; 17(10):1501. https://doi.org/10.3390/w17101501
Chicago/Turabian StyleZang, Zhipeng, Haoming Zong, Zhuo Fang, Jinfeng Zhang, and Cun Hu. 2025. "Experimental Study on the Motion Response Characteristics of a Floating Wind Turbine with a Semi-Submersible Foundation" Water 17, no. 10: 1501. https://doi.org/10.3390/w17101501
APA StyleZang, Z., Zong, H., Fang, Z., Zhang, J., & Hu, C. (2025). Experimental Study on the Motion Response Characteristics of a Floating Wind Turbine with a Semi-Submersible Foundation. Water, 17(10), 1501. https://doi.org/10.3390/w17101501