


Performance of Reynolds Averaged Navier–Stokes and Large Eddy Simulation Models in Simulating Flows in a Crossflow Ultraviolet Reactor: An Experimental Evaluation



Abstract
1. Introduction
2. Experimental Methodology
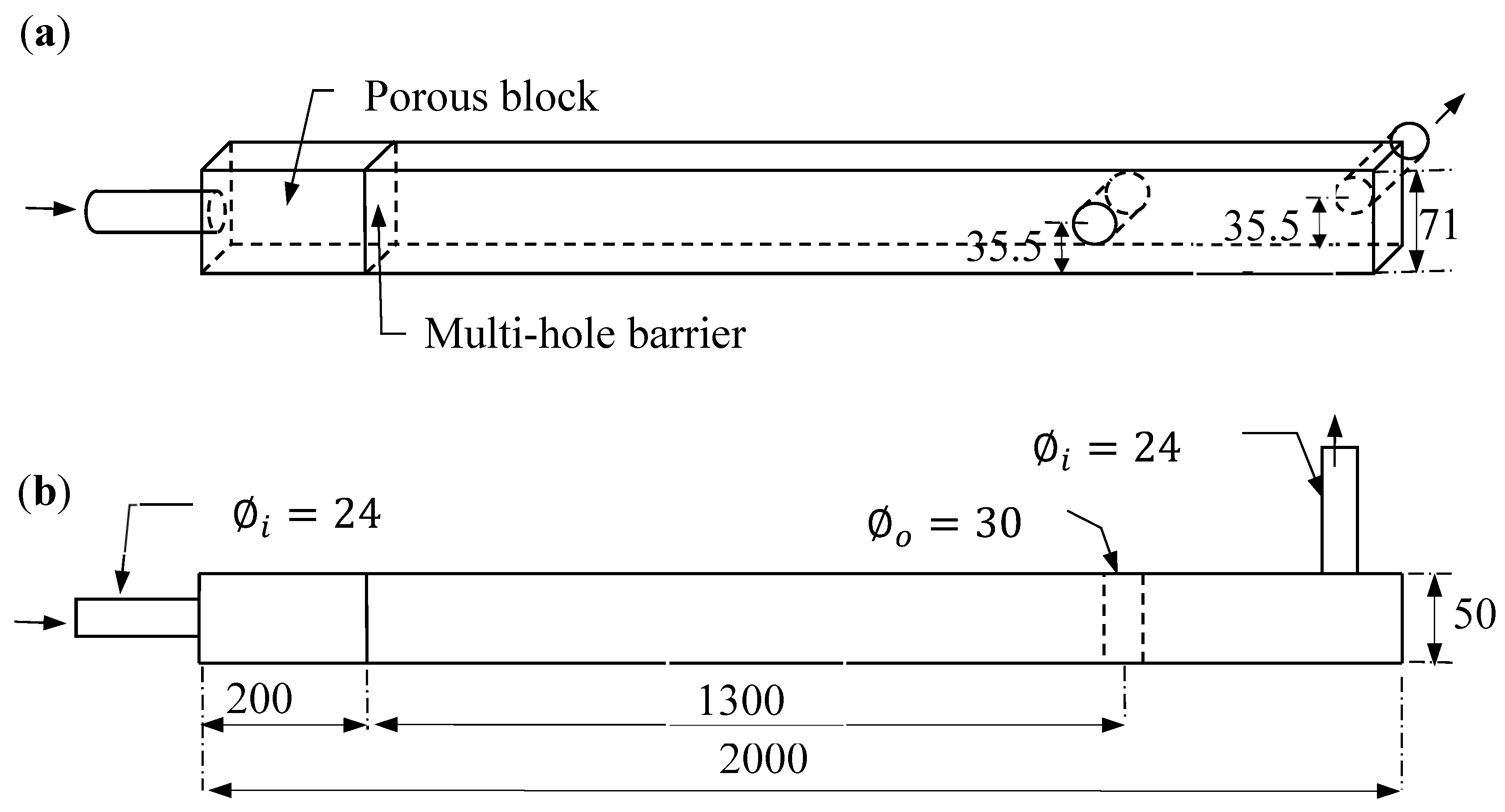
2.1. Experimental Setup
2.2. Experimental Procedures
3. Numerical Methodology
3.1. Governing Equations
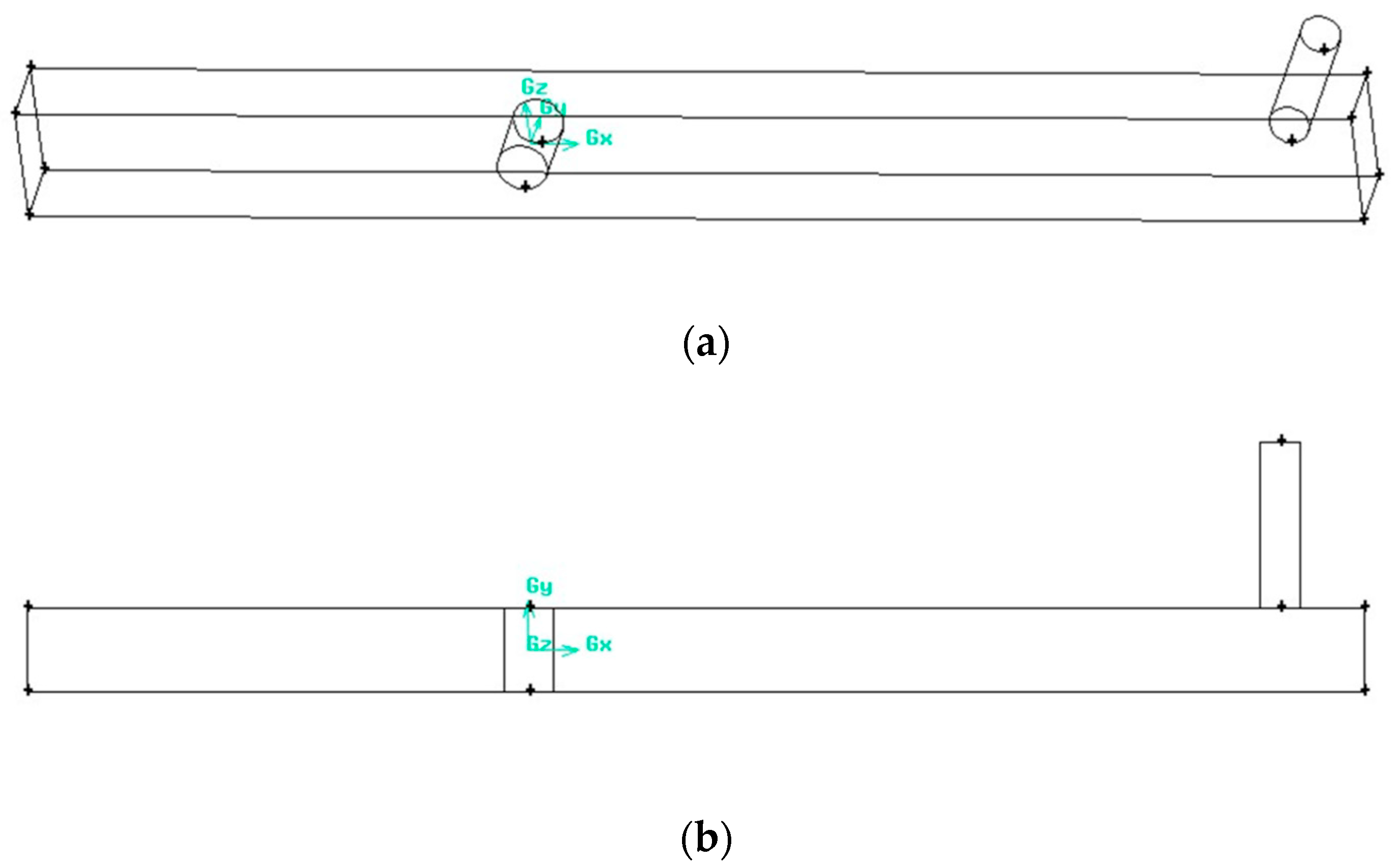
3.2. Numerical Setup
3.3. Meshing and Boundary Conditions
3.4. Solver Settings
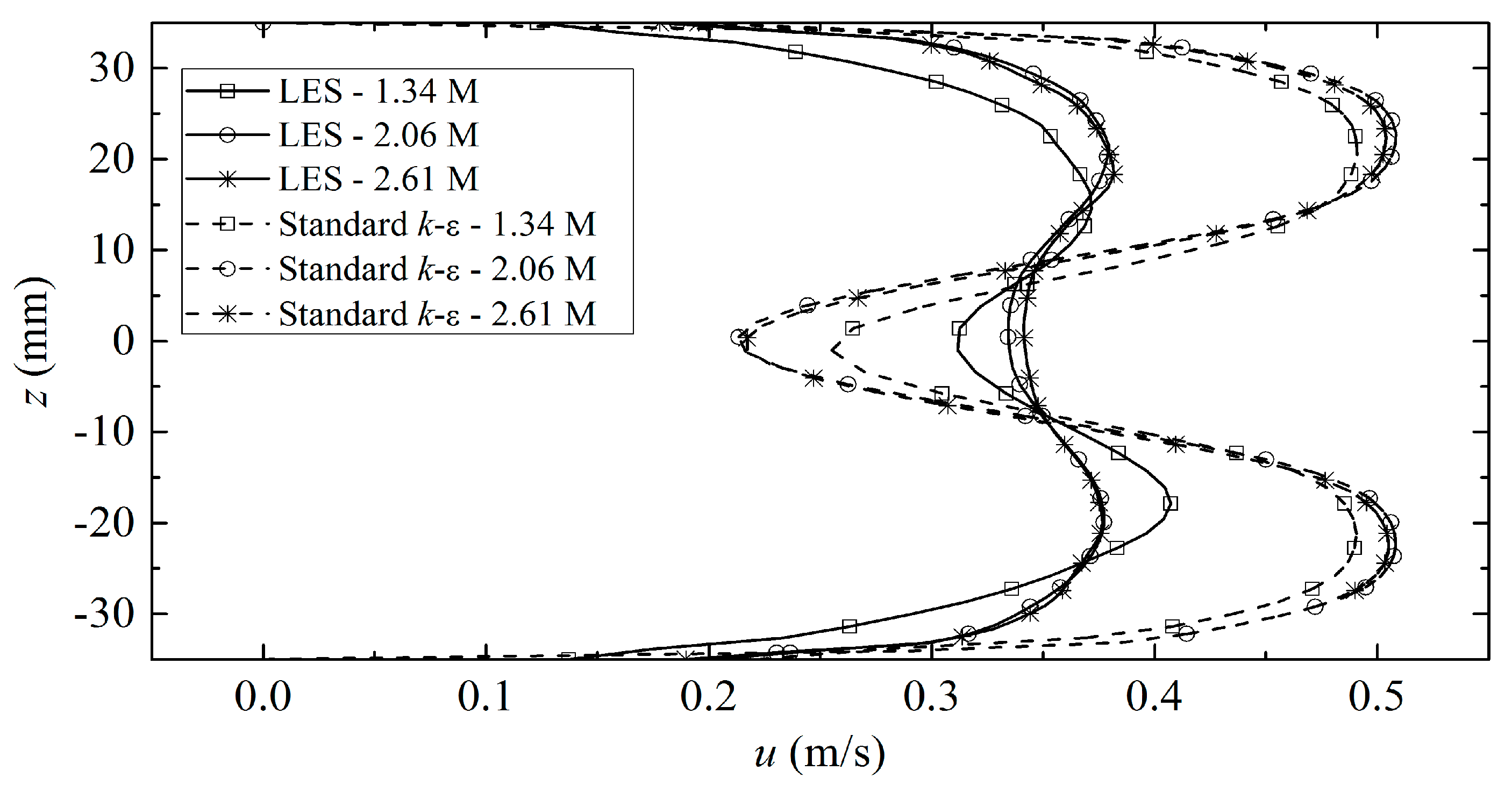
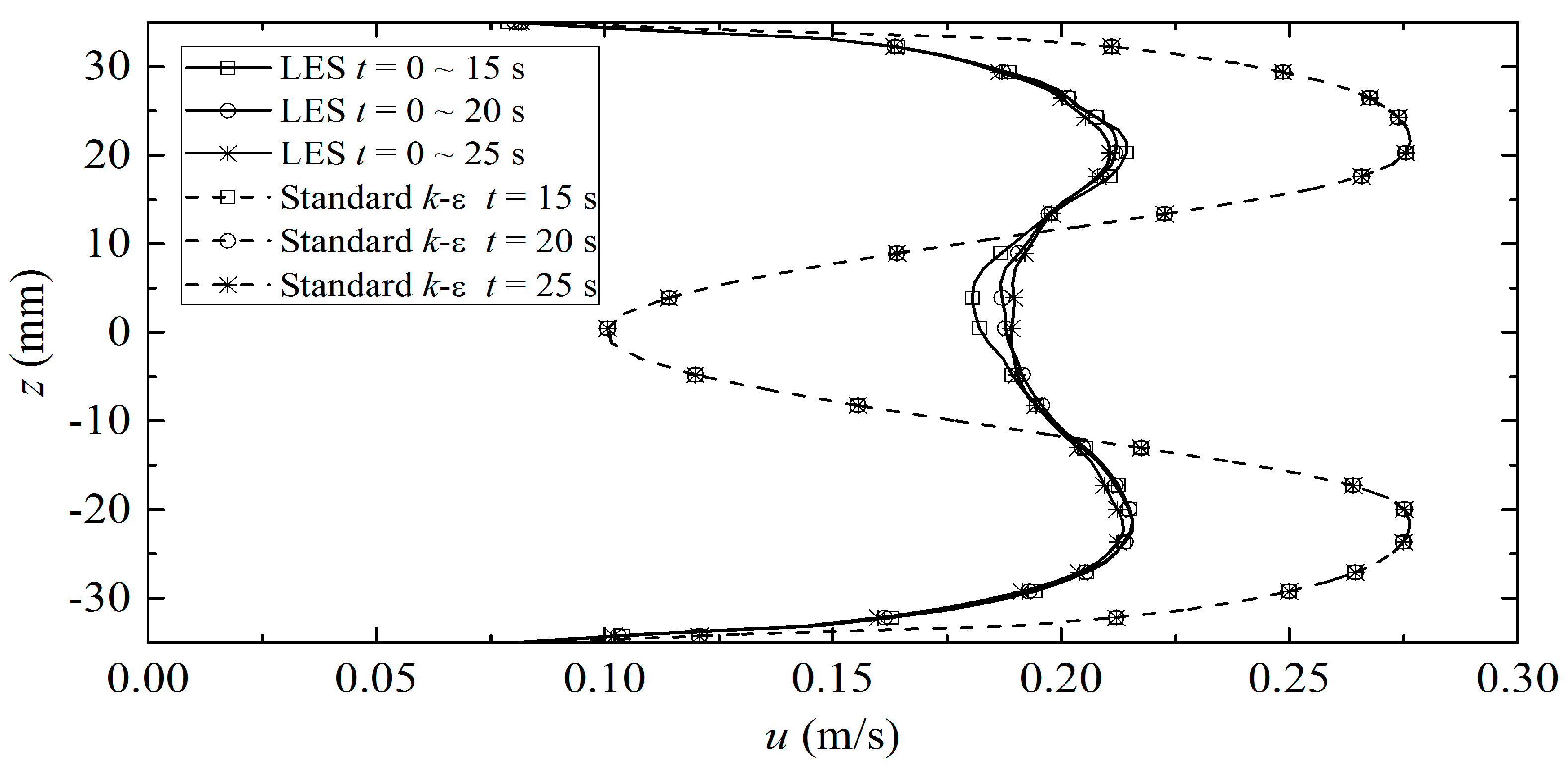
4. Results and Discussion
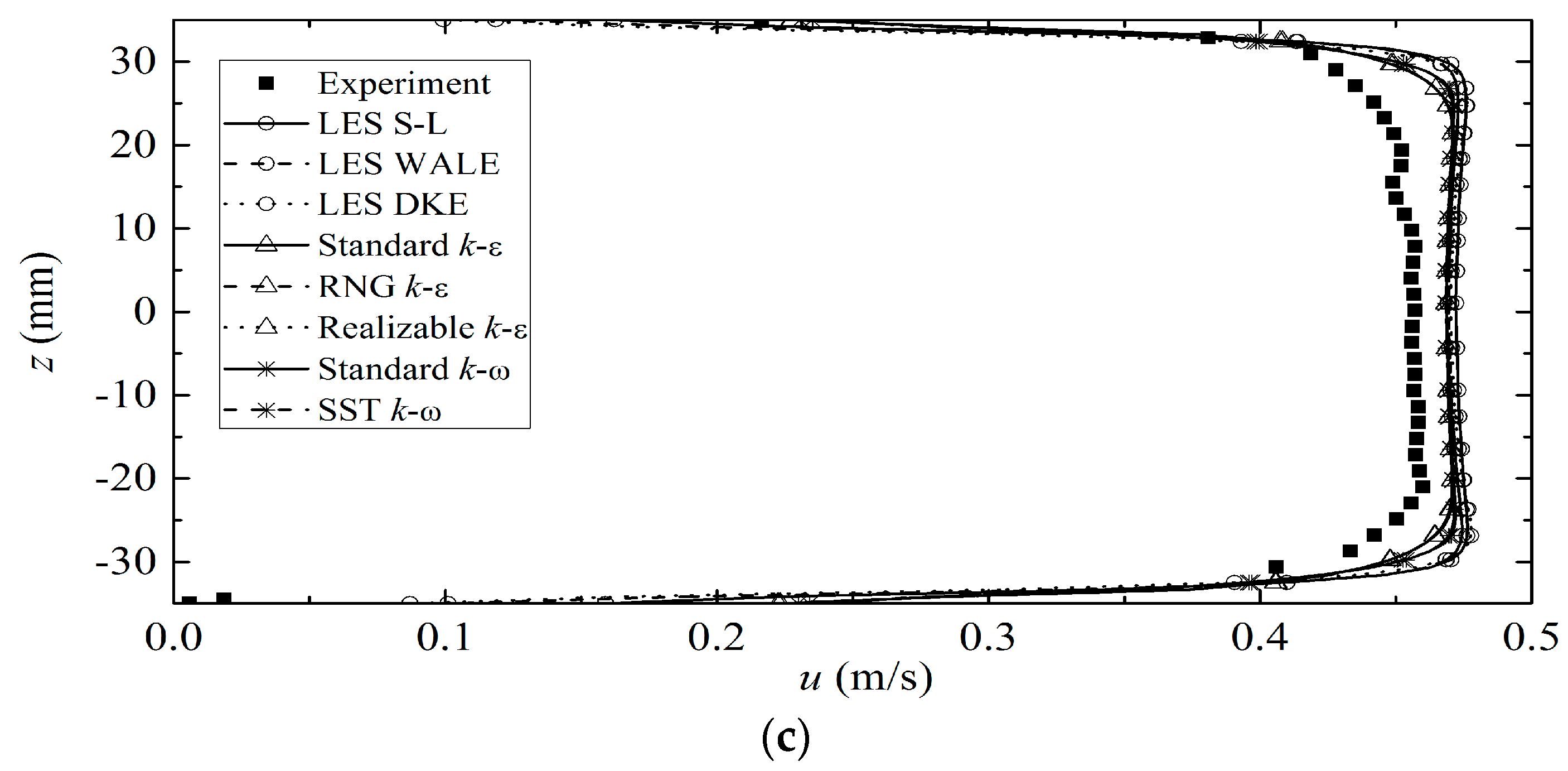
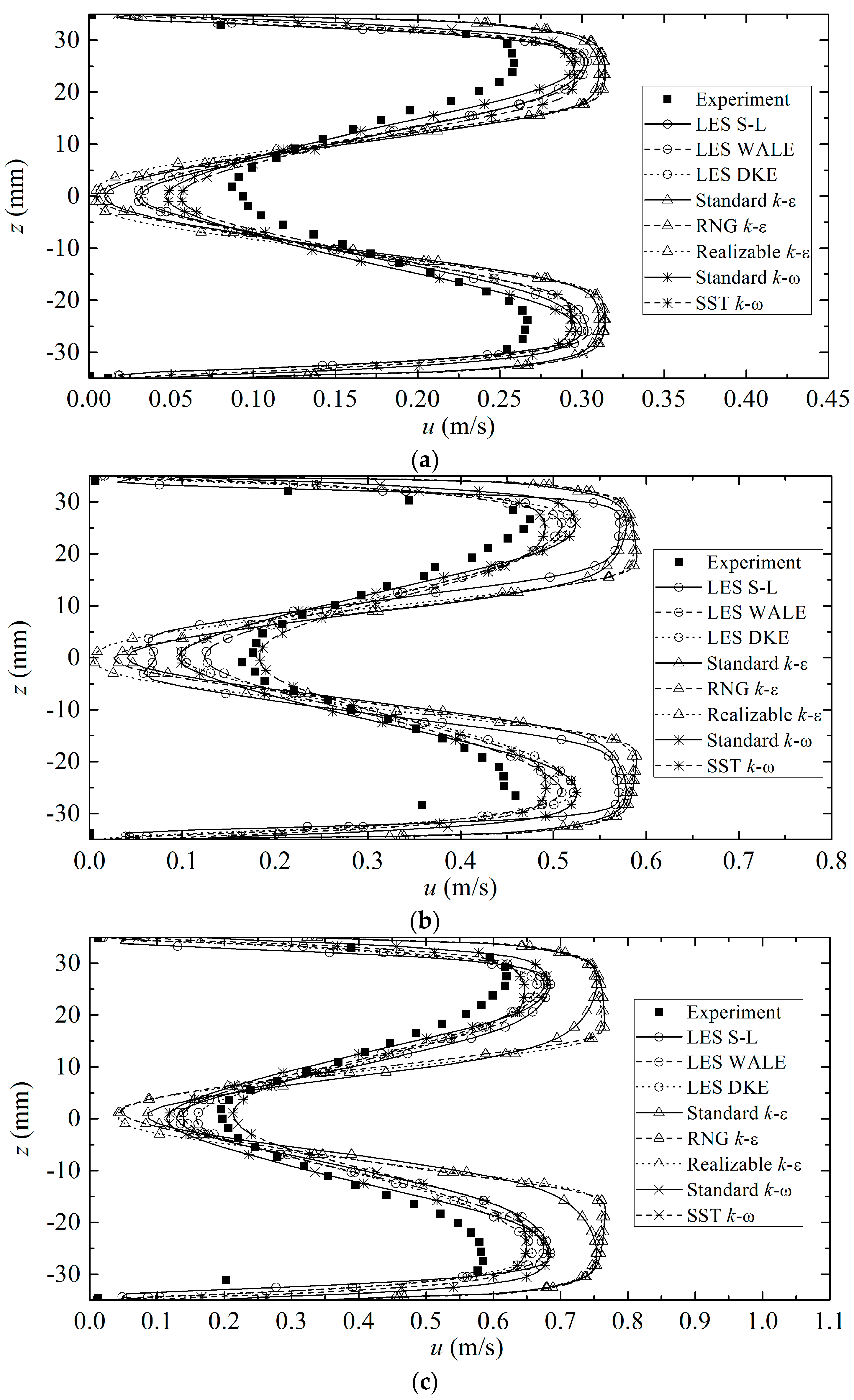
4.1. Velocity Profiles in Upstream Region
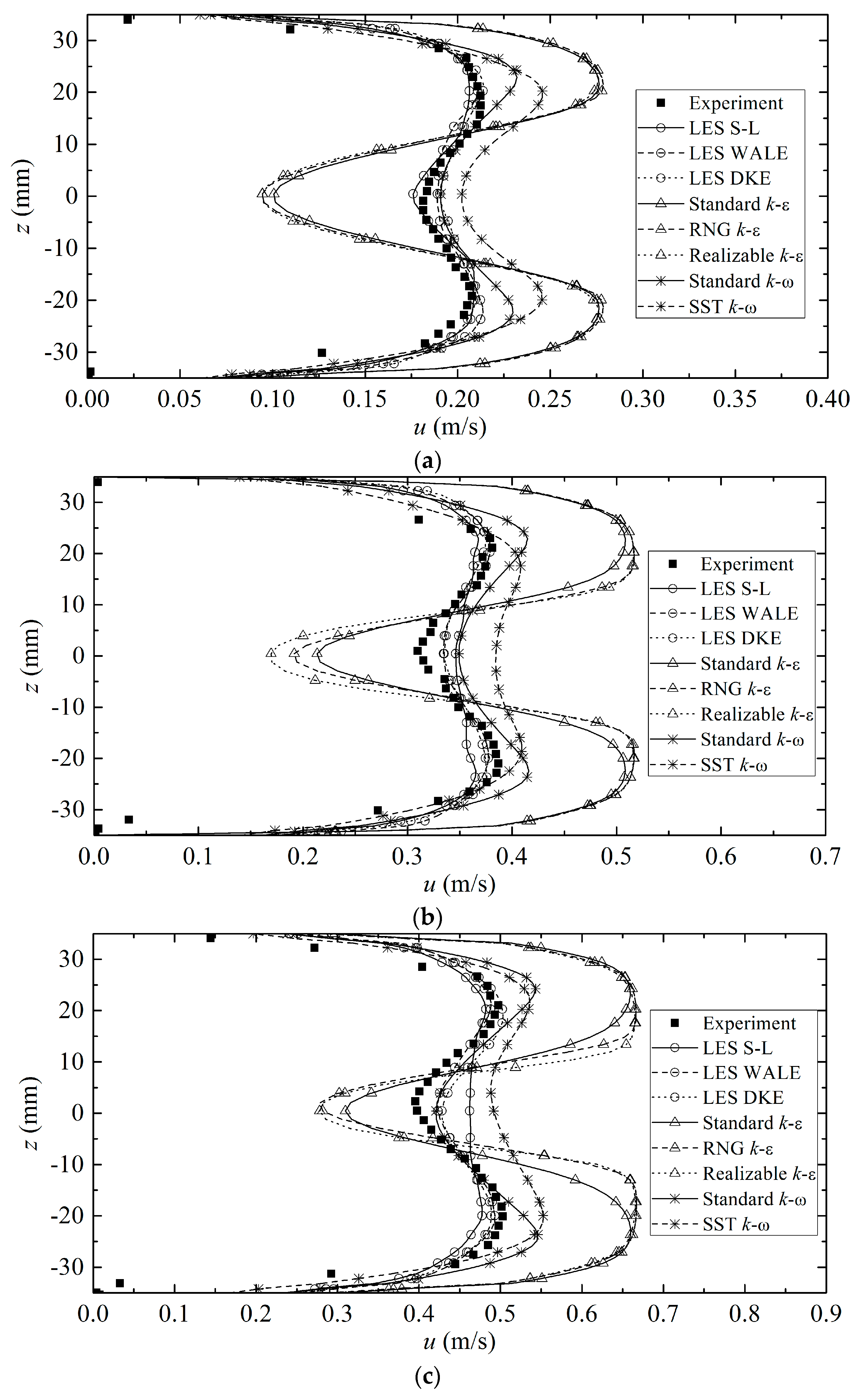
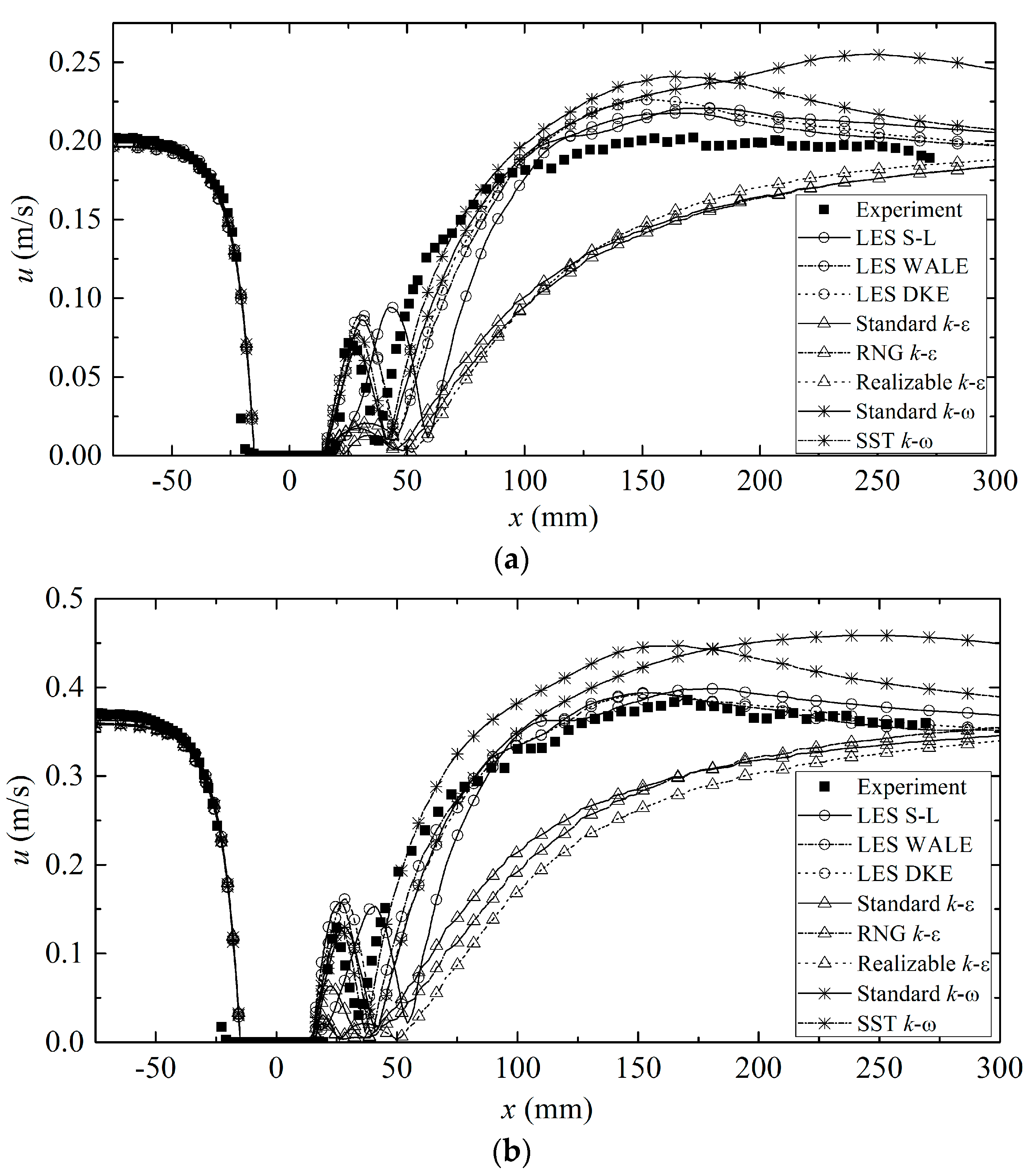
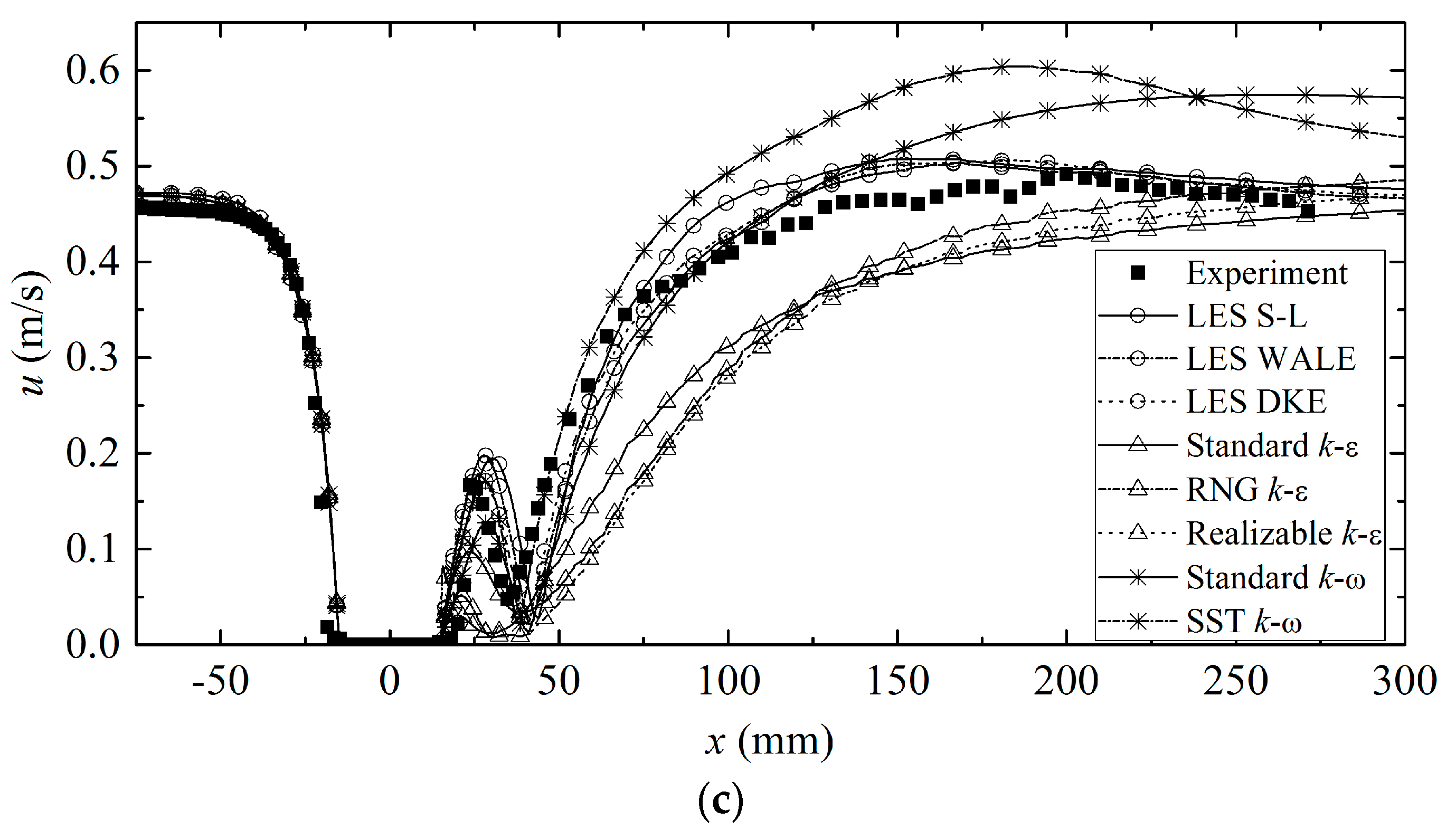
4.2. Velocity Profiles in Wake Region
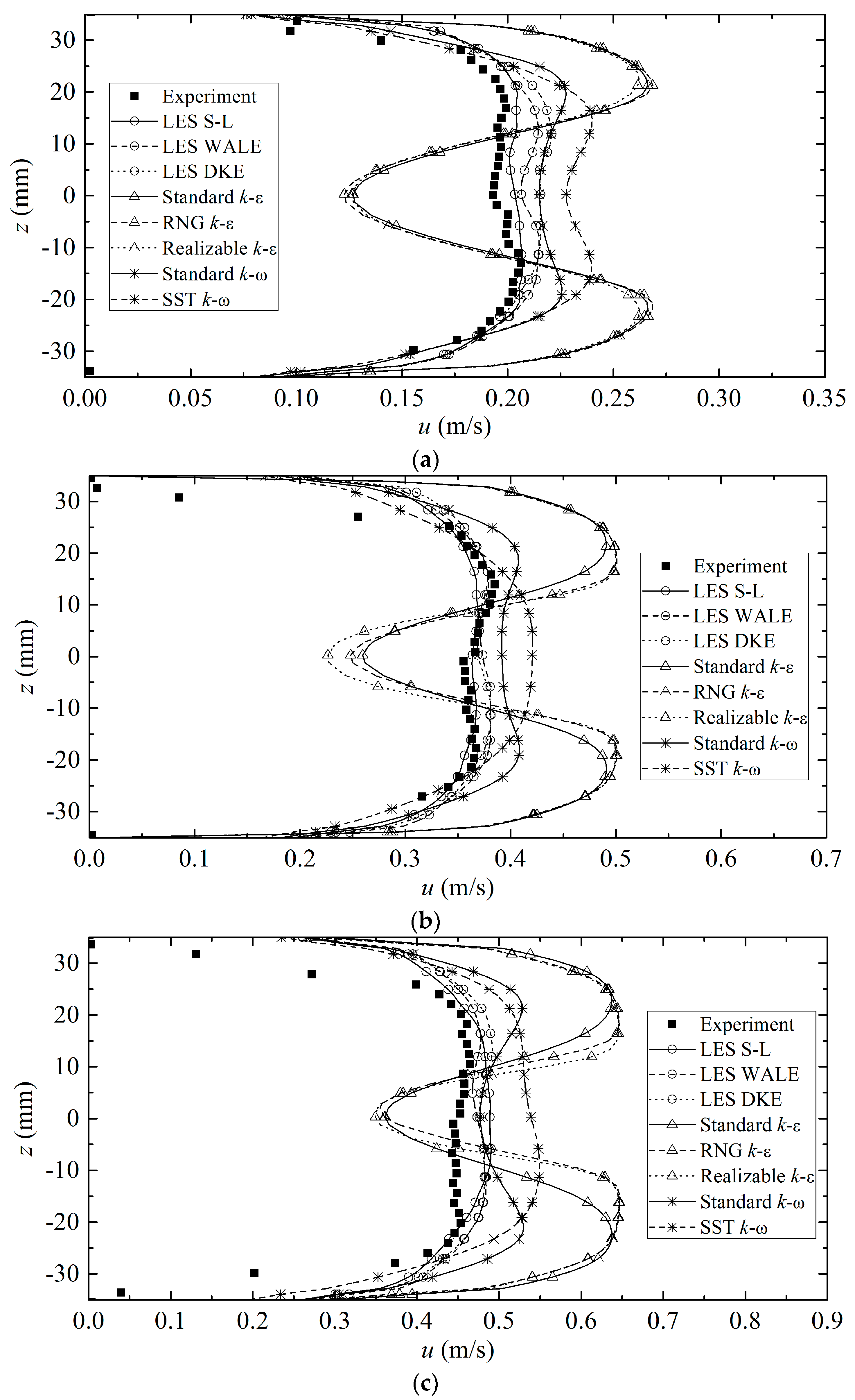
4.3. Velocity Profiles beyond Wake Region
4.4. Longitudinal Velocity Profiles at Centerline
4.5. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. Standard k-ε Closure
Appendix A.2. RNG k-ε Closure
Appendix A.3. Realizable k-ε Closure
Appendix B
Appendix B.1. Standard k-ω Closure
Appendix B.2. SST k-ω Closure
Appendix C
Appendix C.1. Smagorinsky SGS Model
Appendix C.2. Dynamic Kinetic Energy SGS Model
Appendix C.3. Wall-Adapting Local Eddy-Viscosity SGS Model
References
- Hijnen, W.A.M.; Beerendonk, E.F.; Medema, G.J. Inactivation credit of UV radiation for viruses, bacteria and protozoan (oo)cysts in water: A review. Water Res. 2006, 40, 3–22. [Google Scholar] [CrossRef]
- Blatchley, E.R. Numerical modelling of UV intensity: Application to collimated-beam reactors and continuous-flow systems. Water Res. 1997, 31, 2205–2218. [Google Scholar] [CrossRef]
- Bolton, J.R. Calculation of ultraviolet fluence rate distributions in an annular reactor: Significance of refraction and reflection. Water Res. 2000, 34, 3315–3324. [Google Scholar] [CrossRef]
- Ducoste, J.J.; Liu, D.; Linden, K. Alternative Approaches to Modeling Fluence Distribution and Microbial Inactivation in Ultraviolet Reactors: Lagrangian versus Eulerian. J. Environ. Eng. 2005, 131, 1393–1403. [Google Scholar] [CrossRef]
- Simons, R.; Gabbai, U.E.; Moram, M.A. Optical fluence modelling for ultraviolet light emitting diode-based water treatment systems. Water Res. 2014, 66, 338–349. [Google Scholar] [CrossRef]
- Downey, D.; Giles, D.K.; Delwiche, M.J. Finite element analysis of particle and liquid flow through an ultraviolet reactor. Comput. Electron. Agric. 1998, 21, 81–105. [Google Scholar] [CrossRef]
- Liu, D.; Wu, C.; Linden, K.; Ducoste, J. Numerical simulation of UV disinfection reactors: Evaluation of alternative turbulence models. Appl. Math. Model. 2007, 31, 1753–1769. [Google Scholar] [CrossRef]
- Lyn, D.A.; Chiu, K.; Blatchley, E.R., III. Numerical Modeling of Flow and Disinfection in UV Disinfection Channels. J. Environ. Eng. 1999, 125, 17–26. [Google Scholar] [CrossRef]
- Wols, B.A.; Shao, L.; Uijttewaal, W.S.J.; Hofman, J.A.M.H.; Rietveld, L.C.; Van Dijk, J.C. Evaluation of experimental techniques to validate numerical computations of the hydraulics inside a UV bench-scale reactor. Chem. Eng. Sci. 2010, 65, 4491–4502. [Google Scholar] [CrossRef]
- Chiu, K.p.; Lyn, D.A.; Savoye, P.; Blatchley, E.R., III. Effect of UV system modifications on disinfection performance. J. Environ. Eng. 1999, 125, 459–469. [Google Scholar] [CrossRef]
- Jenny, R.M.; Jasper, M.N.; Simmons, O.D.; Shatalov, M.; Ducoste, J.J. Heuristic optimization of a continuous flow point-of-use UV-LED disinfection reactor using computational fluid dynamics. Water Res. 2015, 83, 310–318. [Google Scholar] [CrossRef] [PubMed]
- Li, H.Y.; Osman, H.; Kang, C.W.; Ba, T. Numerical and experimental investigation of UV disinfection for water treatment. Appl. Therm. Eng. 2017, 111, 280–291. [Google Scholar] [CrossRef]
- Munoz, A.; Craik, S.; Kresta, S. Computational fluid dynamics for predicting performance of ultraviolet disinfection–sensitivity to particle tracking inputs. J. Environ. Eng. Sci. 2007, 6, 285–301. [Google Scholar] [CrossRef]
- Younis, B.A.; Mahoney, L.; Palomo, N. A Novel System for Water Disinfection with UV Radiation. Water 2018, 10, 1275. [Google Scholar] [CrossRef]
- Wols, B.A.; Uijttewaal, W.S.J.; Hofman, J.A.M.H.; Rietveld, L.C.; Van Dijk, J.C. The weaknesses of a k-ε model compared to a large-eddy simulation for the prediction of UV dose distributions and disinfection. Chem. Eng. J. 2010, 162, 528–536. [Google Scholar] [CrossRef]
- Zhang, J.; Tejada-Martínez, A.E.; Zhang, Q. Developments in computational fluid dynamics-based modeling for disinfection technologies over the last two decades: A review. Environ. Model. Softw. 2014, 58, 71–85. [Google Scholar] [CrossRef]
- Shah, J.; Židonis, A.; Aggidis, G. State of the art of UV water treatment technologies and hydraulic design optimisation using computational modelling. J. Water Process Eng. 2021, 41, 102099. [Google Scholar] [CrossRef]
- Cao, H.; Deng, B.; Hong, J.; Xue, J.; Chang, F. Numerical Simulation of the Arrangement of Baffles on Radiation Distribution and Disinfection in UV Reactors. Chem. Eng. Technol. 2016, 39, 108–114. [Google Scholar] [CrossRef]
- Chen, J.; Deng, B.; Kim, C.N. Computational fluid dynamics (CFD) modeling of UV disinfection in a closed-conduit reactor. Chem. Eng. Sci. 2011, 66, 4983–4990. [Google Scholar] [CrossRef]
- Jenny, R.M.; Simmons, O.D.; Shatalov, M.; Ducoste, J.J. Modeling a continuous flow ultraviolet Light Emitting Diode reactor using computational fluid dynamics. Chem. Eng. Sci. 2014, 116, 524–535. [Google Scholar] [CrossRef]
- Kooshan, A.S.; Jalali, A.; Chini, S.F. Performance evaluation of point-of-use UVC-LED water disinfection photoreactors using CFD and response surface methodology. J. Water Process Eng. 2022, 46, 102545. [Google Scholar] [CrossRef]
- Li, W.; Li, M.; Bolton, J.R.; Qu, J.; Qiang, Z. Impact of inner-wall reflection on UV reactor performance as evaluated by using computational fluid dynamics: The role of diffuse reflection. Water Res. 2017, 109, 382–388. [Google Scholar] [CrossRef]
- Li, H.Y.; Osman, H.; Kang, C.W.; Ba, T.; Lou, J. Numerical and experimental studies of water disinfection in UV reactors. Water Sci. Technol. 2019, 80, 1456–1465. [Google Scholar] [CrossRef] [PubMed]
- Bose, R.; Yeo, D. Simulations of Flow over an Axisymmetric Hill; 2021:NIST TN 2141; National Institute of Standards and Technology (U.S.): Gaithersburg, MD, USA, 2021. [CrossRef]
- Law, A.W.K.; Wang, H. Measurement of mixing processes with combined digital particle image velocimetry and planar laser induced fluorescence. Exp. Therm. Fluid Sci. 2000, 22, 213–229. [Google Scholar] [CrossRef]
- Zhang, S.; Jiang, B.; Law, A.W.K.; Zhao, B. Large eddy simulations of 45° inclined dense jets. Environ Fluid Mech. 2016, 16, 101–121. [Google Scholar] [CrossRef]
- Williamson, C.H.K. Vortex Dynamics in the Cylinder Wake. Annu. Rev. Fluid Mech. 1996, 28, 477–539. [Google Scholar] [CrossRef]
- Pope, S.B. Turbulent Flows; Cambridge University Press: Cambridge, UK, 2000; Available online: https://pope.mae.cornell.edu/TurbulentFlows.html (accessed on 5 June 2023).
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method, 2nd ed.; Pearson Education Ltd.: London, UK, 2007. [Google Scholar]
- Launder, B.; Spalding, D.B. The Numerical Computation of Turbulent Flow Computer Methods. Comput. Methods Appl. Mech. Eng. 1974, 3, 269–289. [Google Scholar] [CrossRef]
- Smagorinsky, J. General Circulation Experiments with the Primitive Equations: I. the Basic Experiment. Mon. Weather. Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Lilly, D.K. The Representation of Small-Scale Turbulence in Numerical Simulation Experiments. 1967, pp. 195–210. Available online: https://opensky.ucar.edu/islandora/object/manuscripts:861 (accessed on 10 January 2024).
- Courant, R.; Friedrichs, K.; Lewy, H. On the Partial Difference Equations of Mathematical Physics. IBM J. Res. Dev. 1967, 11, 215–234. [Google Scholar] [CrossRef]
- Breuer, M. A challenging test case for large eddy simulation: High Reynolds number circular cylinder flow. Int. J. Heat Fluid Flow 2000, 21, 648–654. [Google Scholar] [CrossRef]
- Cantwell, B.; Coles, D. An experimental study of entrainment and transport in the turbulent near wake of a circular cylinder. J. Fluid Mech. 1983, 136, 321–374. [Google Scholar] [CrossRef]
- Kolmogorov, A.N. The Local Structure of Turbulence in Incompressible Viscous Fluid for Very Large Reynolds Numbers. Proc. Math. Phys. Sci. 1991, 434, 9–13. [Google Scholar]
- Wilcox, D.C. Reassessment of the scale-determining equation for advanced turbulence models. AIAA J. 1988, 26, 1299–1310. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Canada, CA, USA, 1998; Volume 2. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Launder, B.E.; Spalding, D.B. Lectures in Mathematical Models of Turbulence; Academic Press: Cambridge, MA, USA, 1972. [Google Scholar]
- Yakhot, V.; Orszag, S.A.; Thangam, S.; Gatski, T.B.; Speziale, C.G. Development of turbulence models for shear flows by a double expansion technique. Phys. Fluids A Fluid Dyn. 1992, 4, 1510–1520. [Google Scholar] [CrossRef]
- Shih, T.H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A new k-ϵ eddy viscosity model for high reynolds number turbulent flows. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Kim, W.W.; Menon, S. Application of the localized dynamic subgrid-scale model to turbulent wall-bounded flows. In 35th Aerospace Sciences Meeting and Exhibit; Aerospace Sciences Meetings; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1997. [Google Scholar] [CrossRef]
- Nicoud, F.; Ducros, F. Subgrid-Scale Stress Modelling Based on the Square of the Velocity Gradient Tensor. Flow Turbul. Combust. 1999, 62, 183–200. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | 1 | 2 | 3 |
|---|---|---|---|
| Flow Rate Q0 (L/s) | 0.63 | 1.18 | 1.55 |
| Cross-Sectional Averaged Velocity U0 (m/s) | 0.176 | 0.332 | 0.437 |
| Re | 6600 | 12,400 | 16,400 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Law, A.W.-K. Performance of Reynolds Averaged Navier–Stokes and Large Eddy Simulation Models in Simulating Flows in a Crossflow Ultraviolet Reactor: An Experimental Evaluation. Water 2024, 16, 271. https://doi.org/10.3390/w16020271
Zhang S, Law AW-K. Performance of Reynolds Averaged Navier–Stokes and Large Eddy Simulation Models in Simulating Flows in a Crossflow Ultraviolet Reactor: An Experimental Evaluation. Water. 2024; 16(2):271. https://doi.org/10.3390/w16020271
Chicago/Turabian StyleZhang, Shuai, and Adrian Wing-Keung Law. 2024. "Performance of Reynolds Averaged Navier–Stokes and Large Eddy Simulation Models in Simulating Flows in a Crossflow Ultraviolet Reactor: An Experimental Evaluation" Water 16, no. 2: 271. https://doi.org/10.3390/w16020271
APA StyleZhang, S., & Law, A. W.-K. (2024). Performance of Reynolds Averaged Navier–Stokes and Large Eddy Simulation Models in Simulating Flows in a Crossflow Ultraviolet Reactor: An Experimental Evaluation. Water, 16(2), 271. https://doi.org/10.3390/w16020271