Performance of a PDE-Based Hydrologic Model in a Flash Flood Modeling Framework in Sparsely-Gauged Catchments

 , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
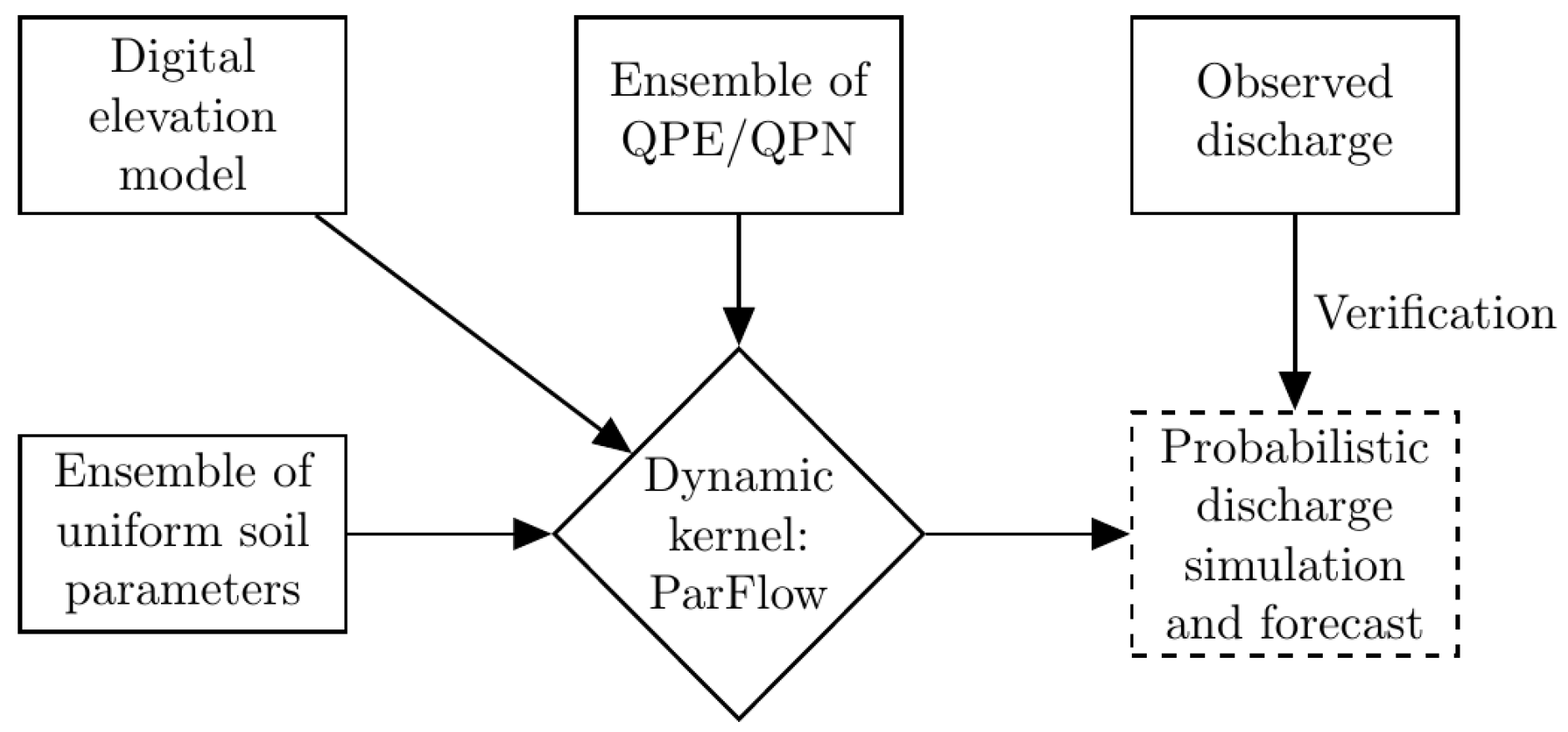
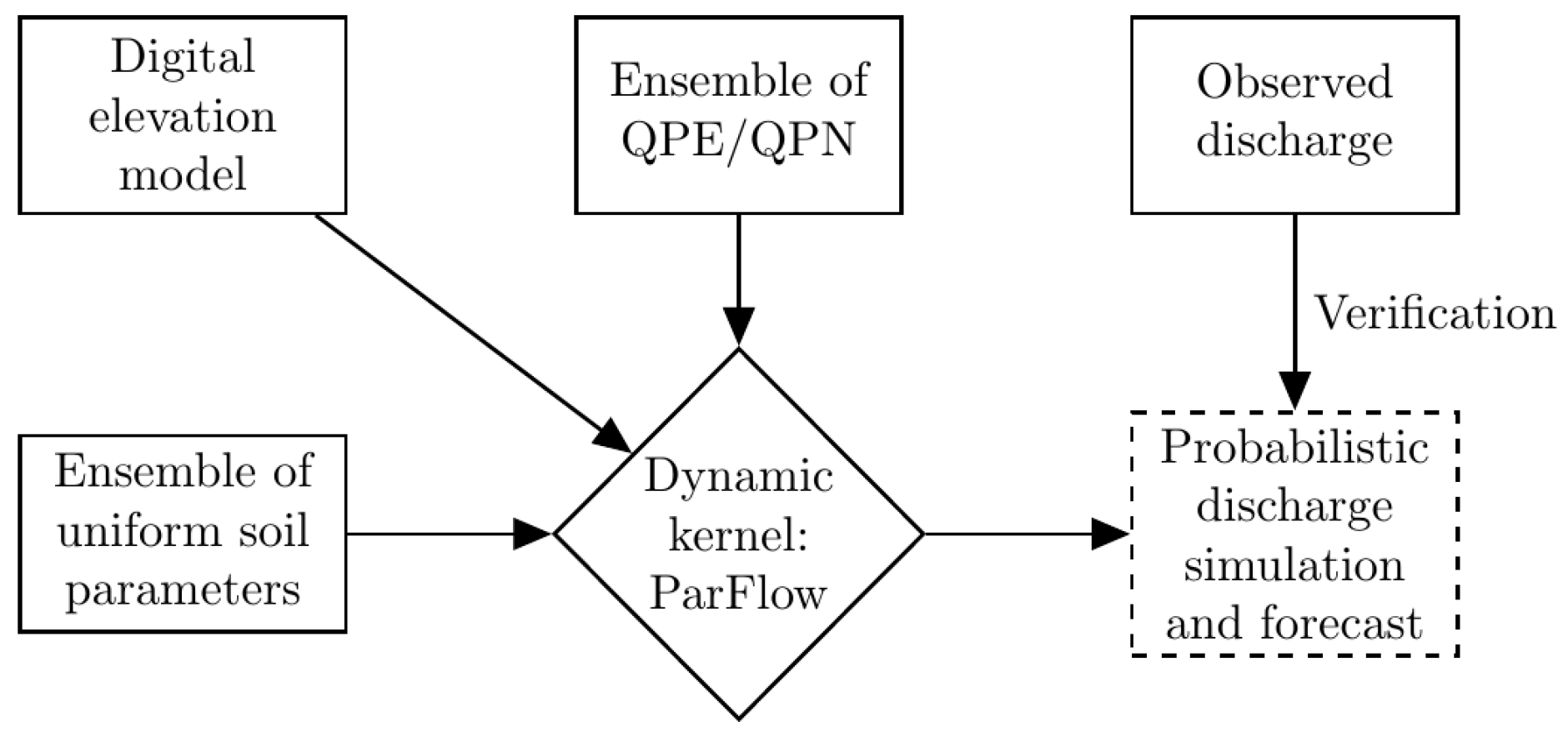
2.1. Framework
2.2. Framework Components
2.2.1. The ParFlow Model
2.2.2. Quantitative Precipitation Estimates and Nowcasts
2.2.3. Ensemble Generation for Uncertainty Estimation
2.3. Framework Application
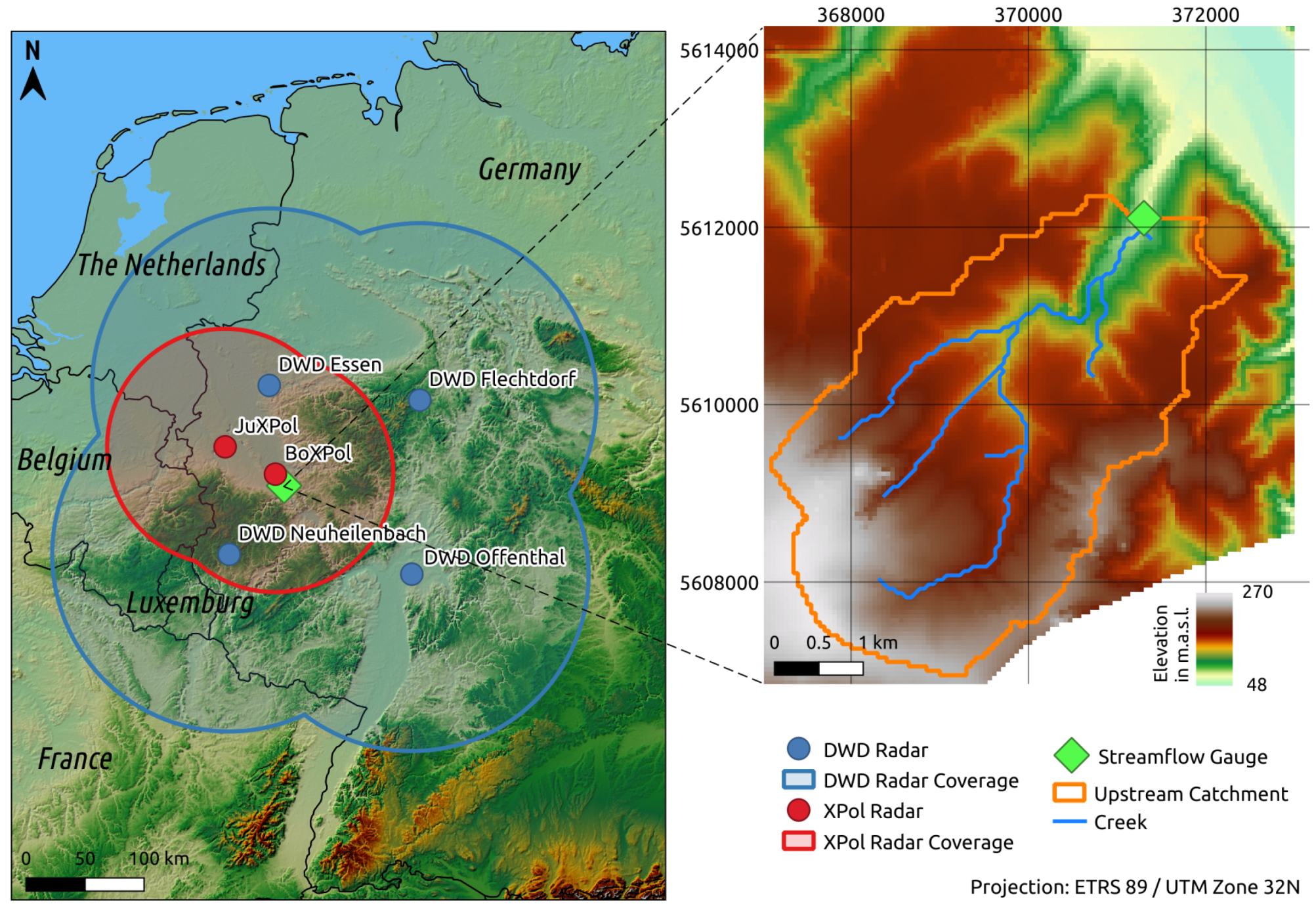
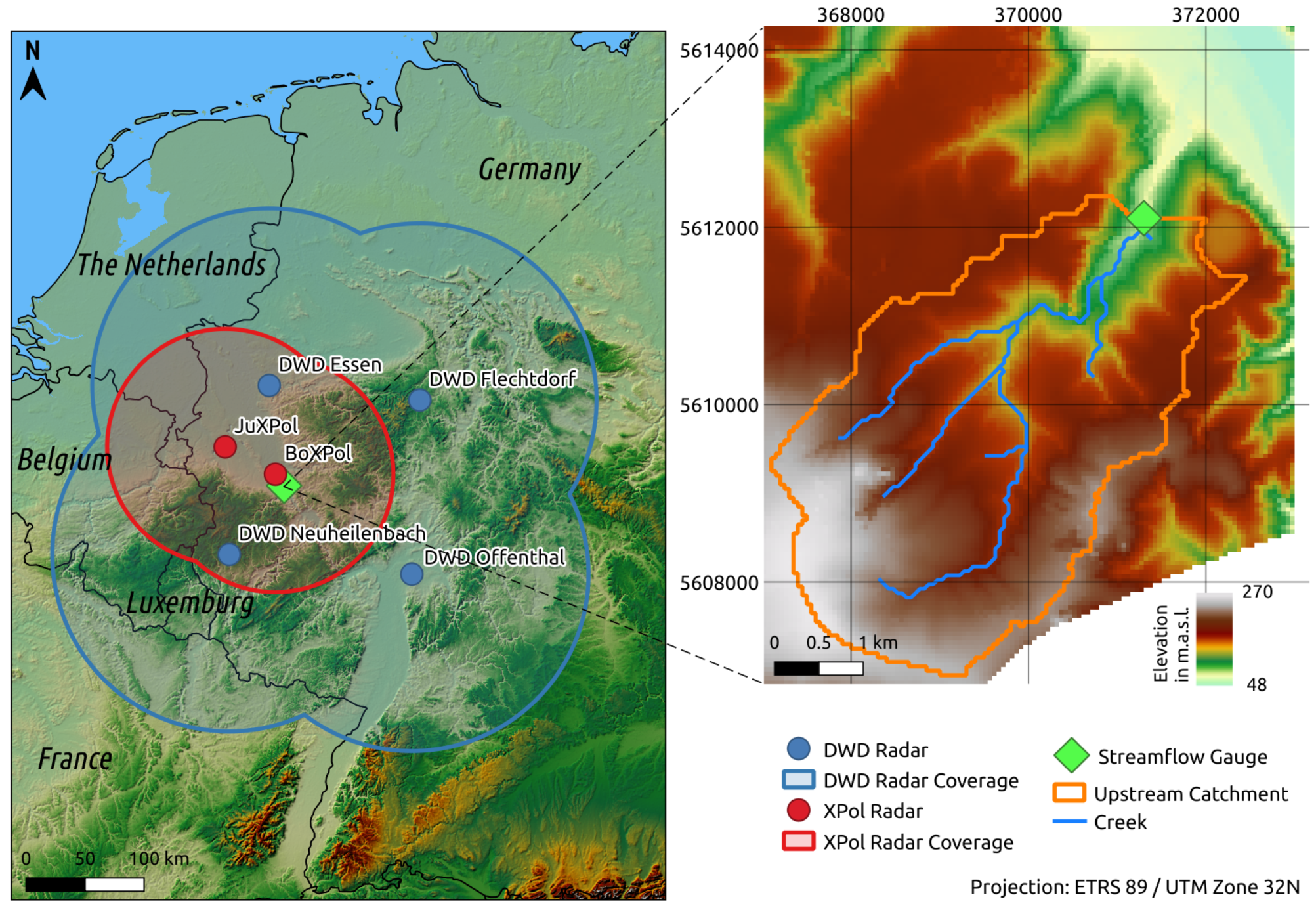
2.3.1. Study Area
2.3.2. ParFlow Model Setup
2.3.3. Hindcasting and Nowcasting Experiments
2.3.4. Comparison with the Lumped Conceptual HBV Model
3. Results and Discussion
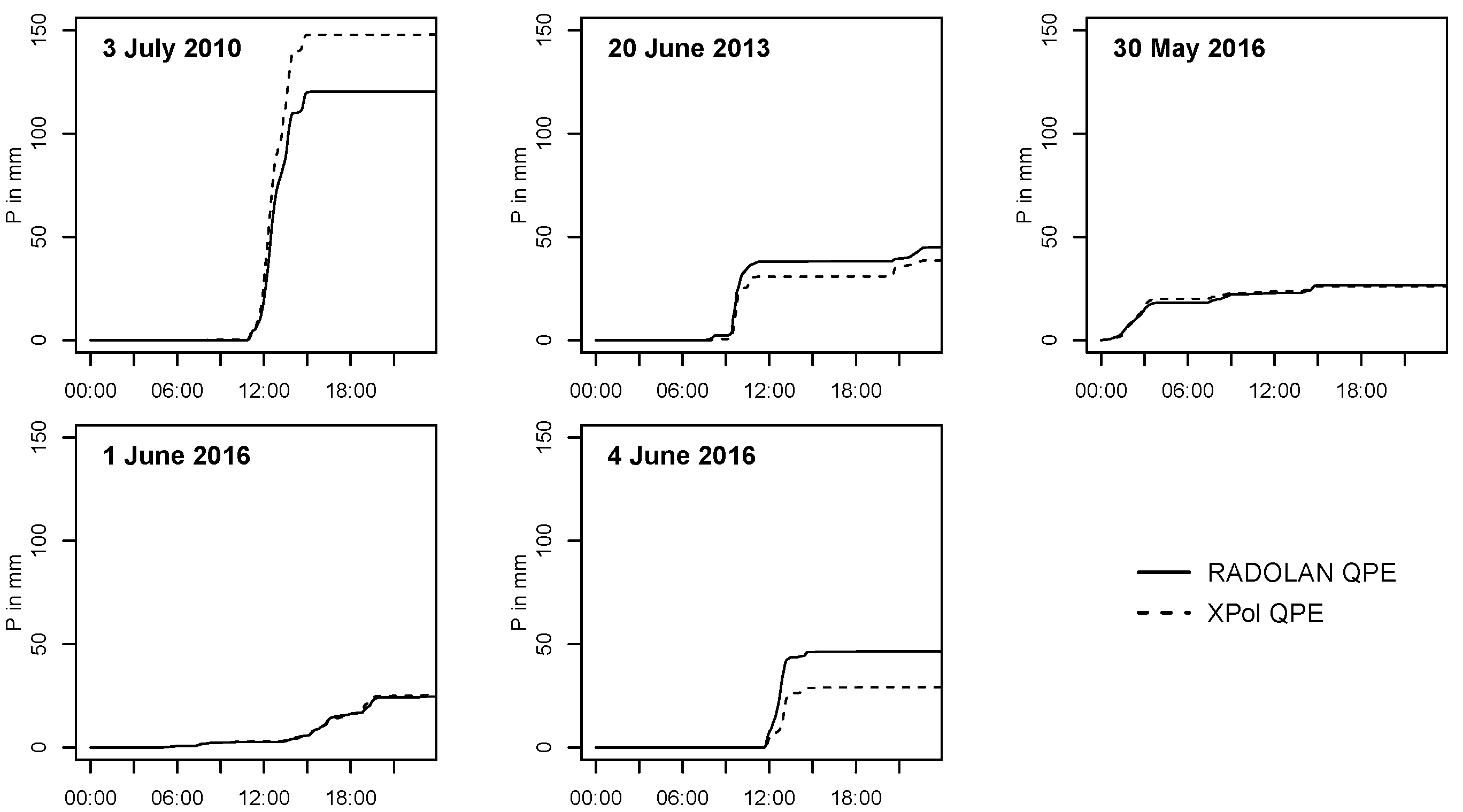
3.1. Radar QPE Uncertainty
3.2. Model Results
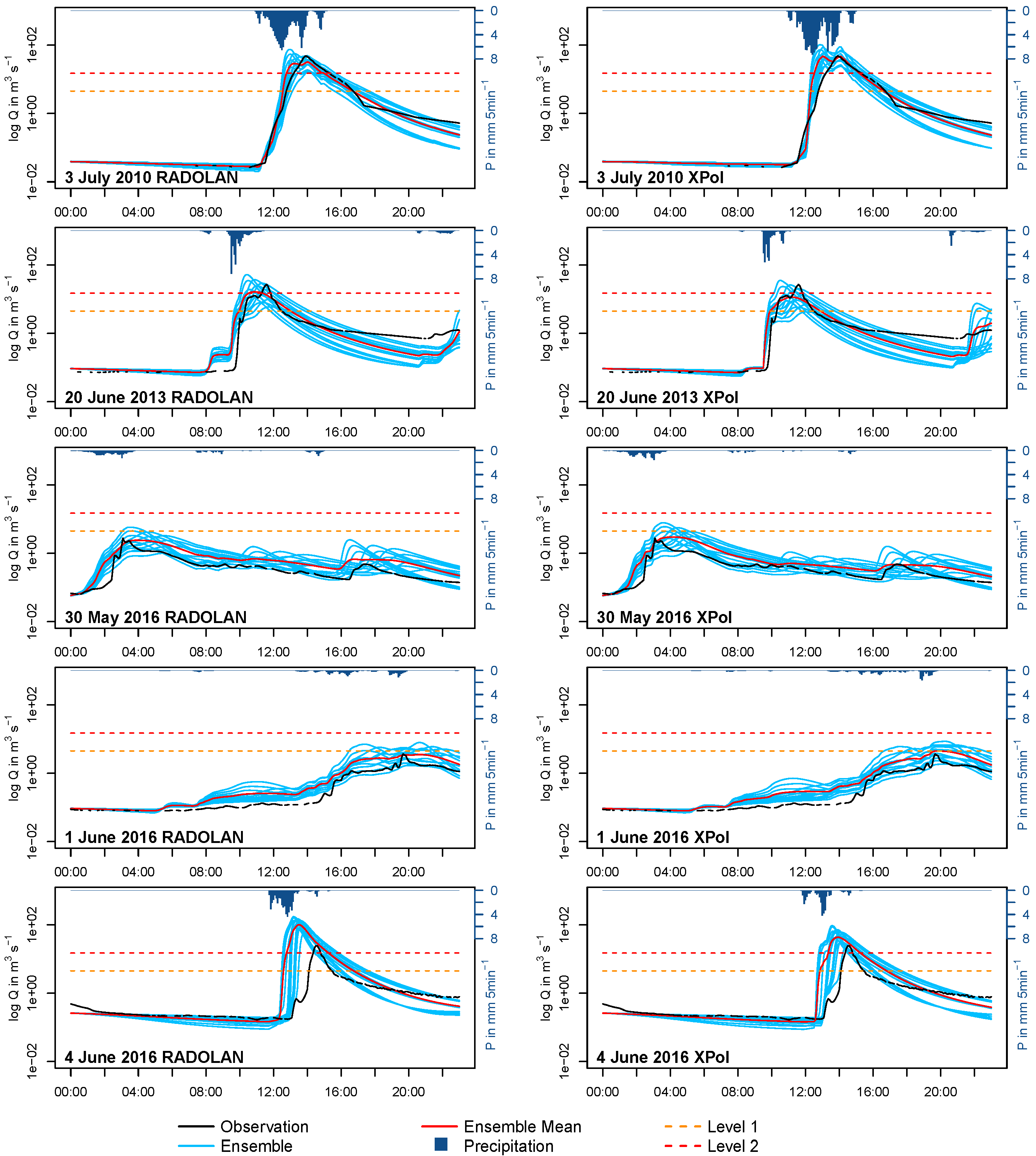
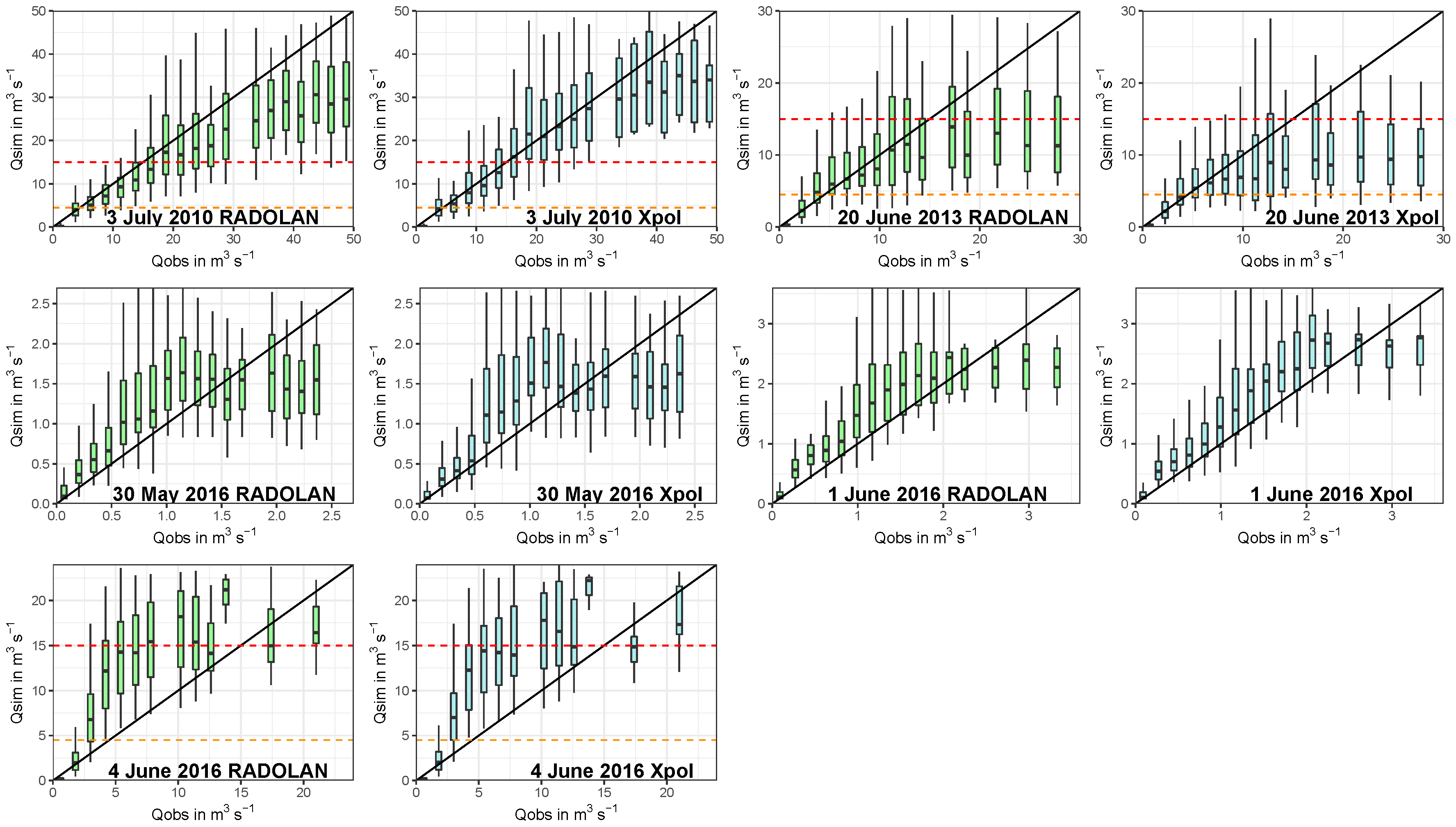
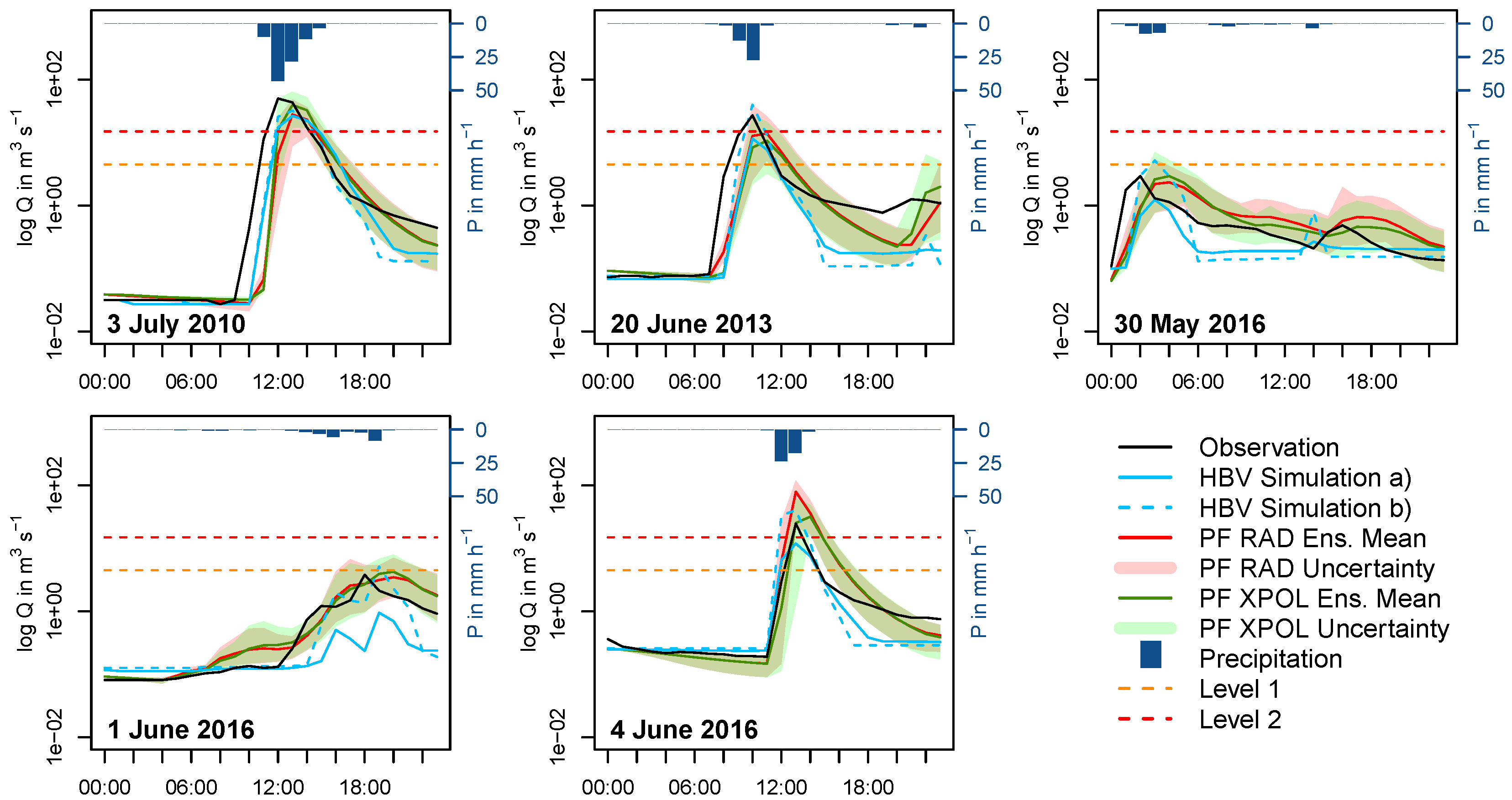
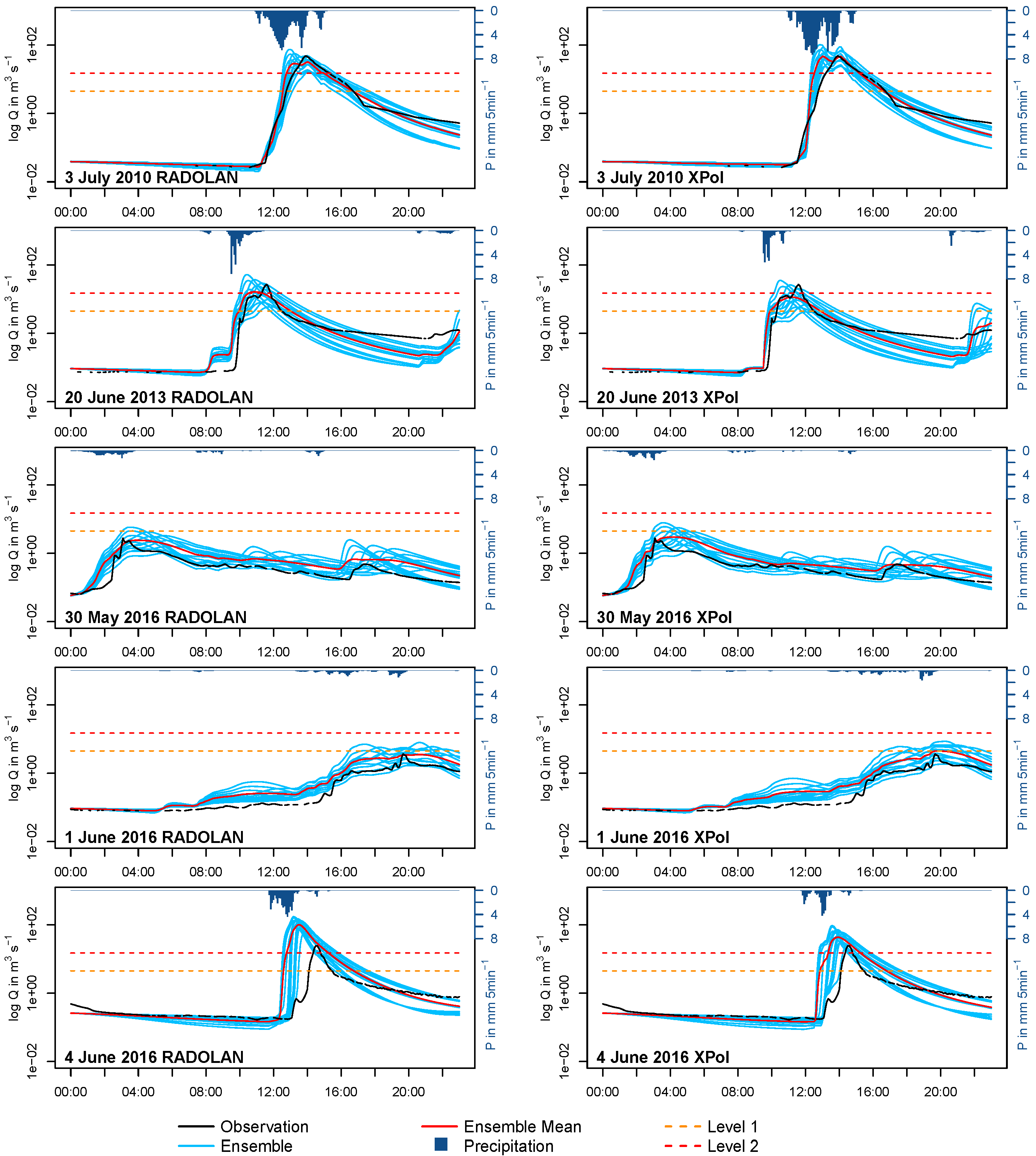
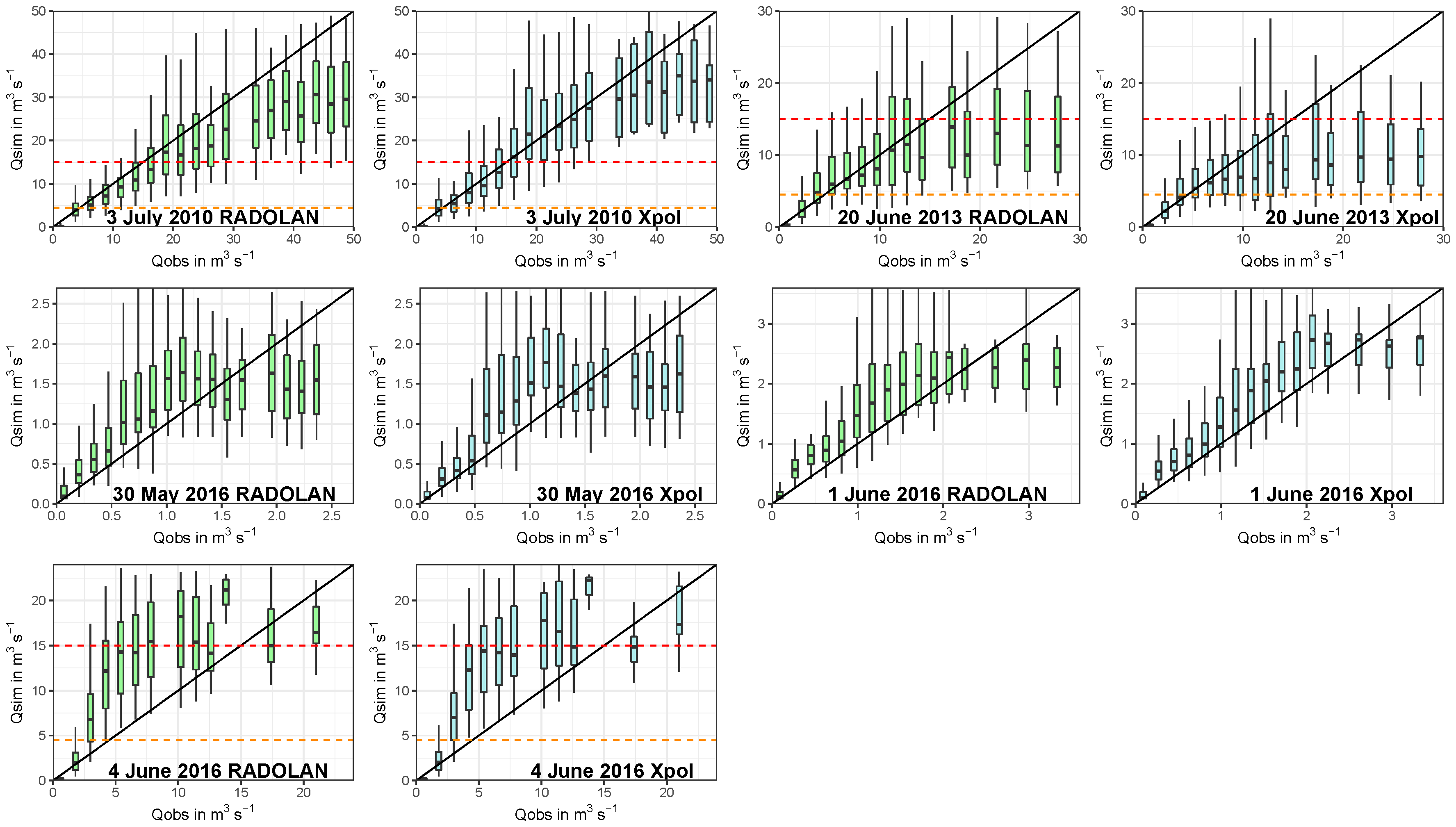
3.2.1. ParFlow Hindcast Experiment
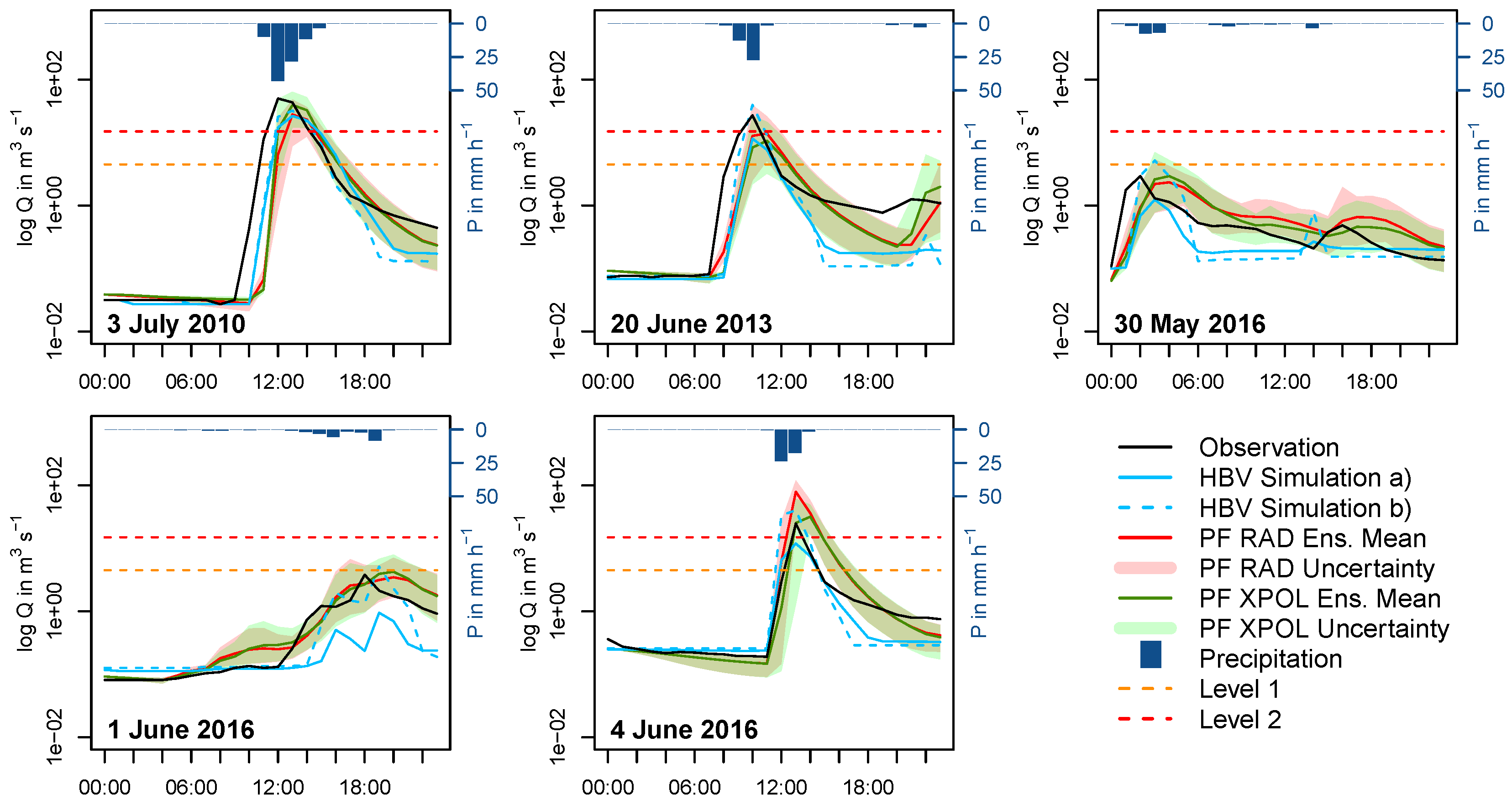
3.2.2. Comparison with HBV Hindcasts
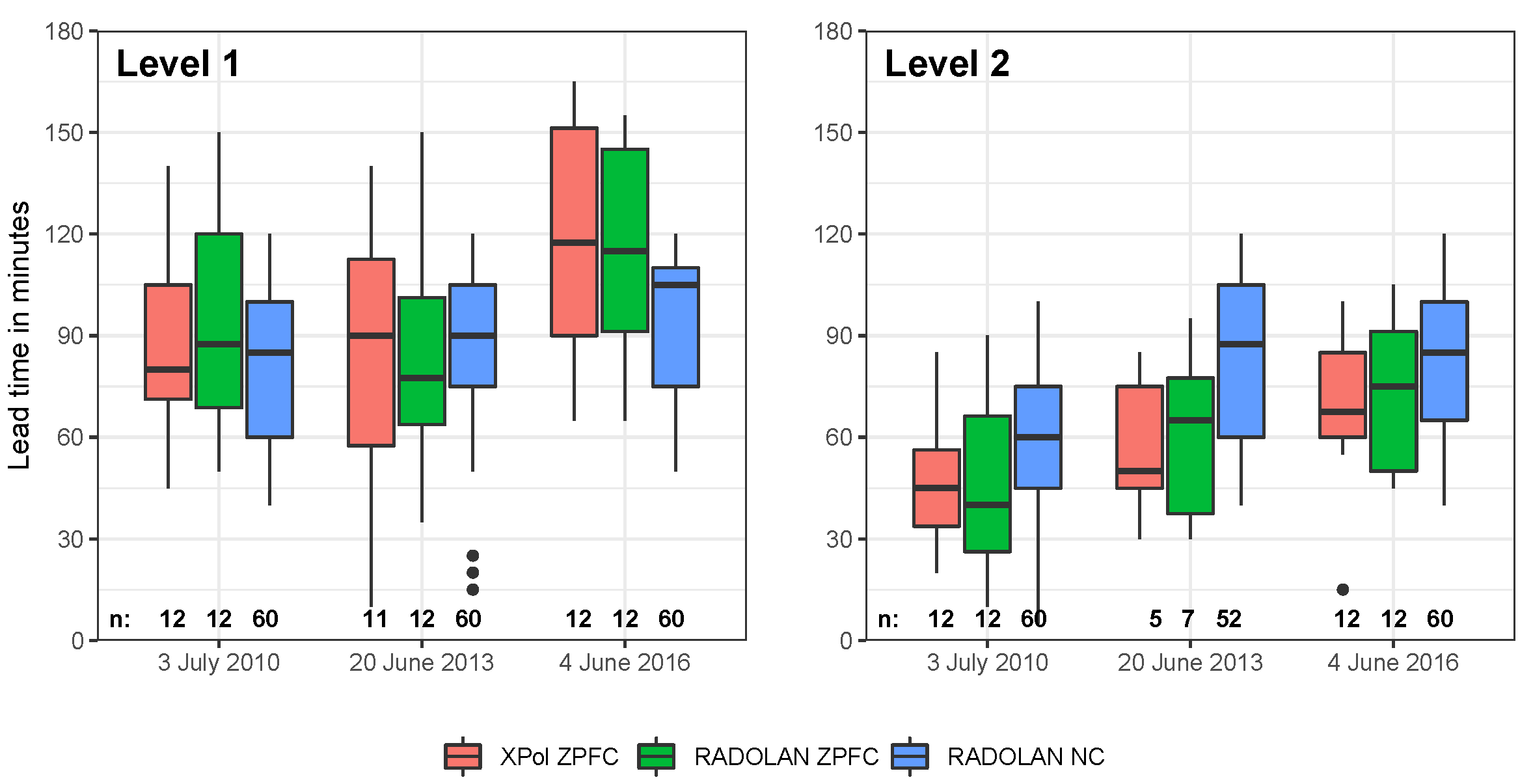
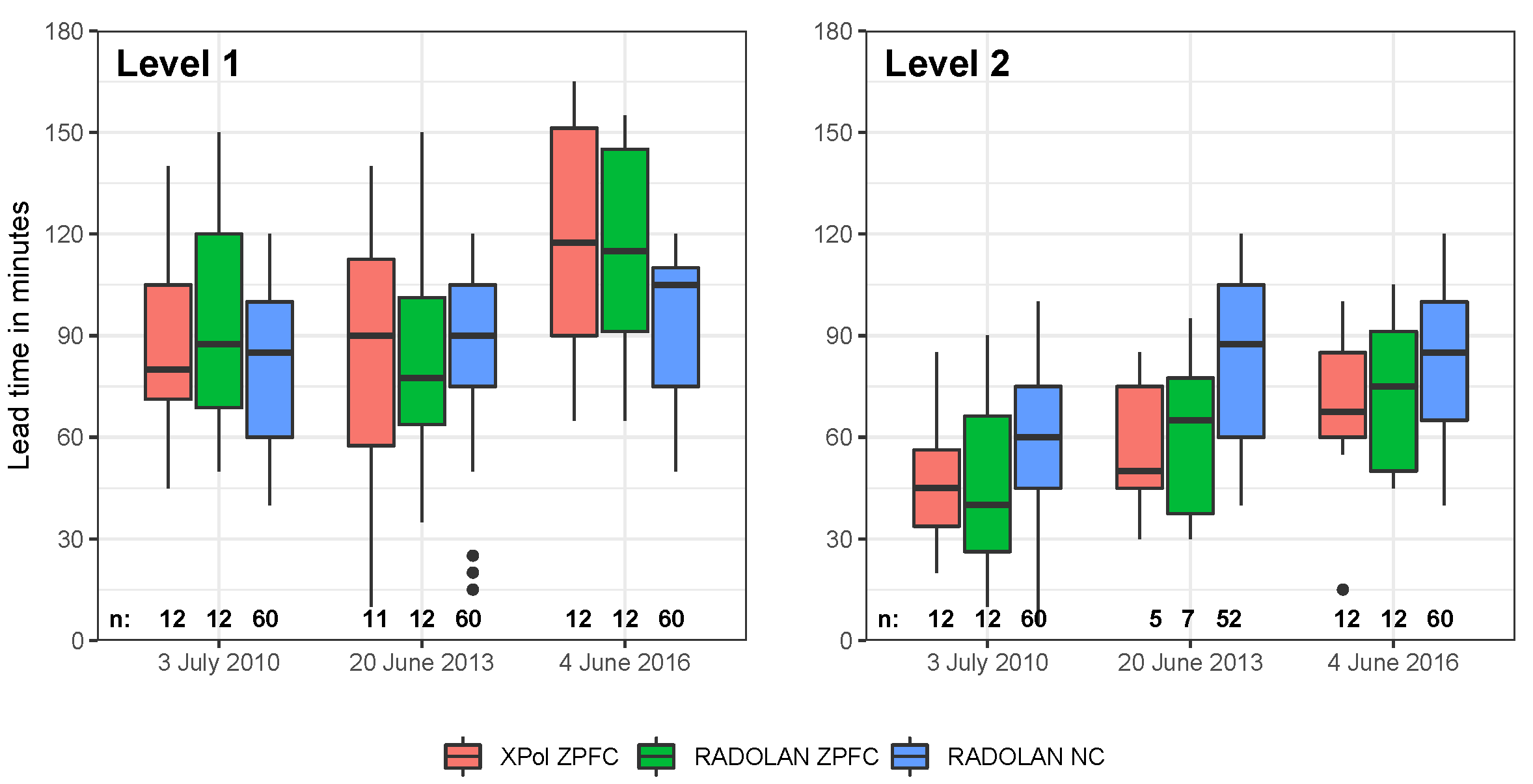
3.2.3. ParFlow Zero Precipitation Forecast and Nowcast Experiment
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alfieri, L.; Salamon, P.; Pappenberger, F.; Wetterhall, F.; Thielen, J. Operational early warning systems for water-related hazards in Europe. Environ. Sci. Policy 2012, 21, 35–49. [Google Scholar] [CrossRef]
- Collier, C.G. Flash flood forecasting: What are the limits of predictability? Q. J. R. Meteorol. Soc. 2007, 133, 3–23. [Google Scholar] [CrossRef]
- Gaume, E.; Bain, V.; Bernardara, P.; Newinger, O.; Barbuc, M.; Bateman, A.; Blaškovičová, L.; Blöschl, G.; Borga, M.; Dumitrescu, A.; et al. A compilation of data on European flash floods. J. Hydrol. 2009, 367, 70–78. [Google Scholar] [CrossRef] [Green Version]
- Hapuarachchi, H.A.; Wang, Q.J.; Pagano, T.C. A review of advances in flash flood forecasting. Hydrol. Process. 2011, 25, 2771–2784. [Google Scholar] [CrossRef]
- Beven, K. Rainfall-Runoff Modelling: The Primer, 2nd ed.; Wiley-Blackwell: Chichester, UK, 2012. [Google Scholar] [CrossRef]
- Cloke, H.L.; Pappenberger, F. Ensemble flood forecasting: A review. J. Hydrol. 2009, 375, 613–626. [Google Scholar] [CrossRef]
- Silvestro, F.; Rebora, N. Operational verification of a framework for the probabilistic nowcasting of river discharge in small and medium size basins. Nat. Hazards Earth Syst. Sci. 2012, 12, 763–776. [Google Scholar] [CrossRef] [Green Version]
- Kendon, E.J.; Roberts, N.M.; Fowler, H.J.; Roberts, M.J.; Chan, S.C.; Senior, C.A. Heavier summer downpours with climate change revealed by weather forecast resolution model. Nat. Clim. Chang. 2014, 4, 570–576. [Google Scholar] [CrossRef] [Green Version]
- Doviak, R.; Zrnić, D. Doppler Radar and Weather Observations; Academic Press: San Diego, CA, USA, 1993. [Google Scholar] [CrossRef]
- He, X.; Sonnenborg, T.O.; Refsgaard, J.C.; Vejen, F.; Jensen, K.H. Evaluation of the value of radar QPE data and rain gauge data for hydrological modeling. Water Resour. Res. 2013, 49, 5989–6005. [Google Scholar] [CrossRef]
- Hong, Y.; Gourley, J.J. Radar Hydrology—Principles, Models and Applications; Taylor & Francis: Boca Raton, FL, USA, 2015. [Google Scholar]
- Lobligeois, F.; Andréassian, V.; Perrin, C.; Tabary, P.; Loumagne, C. When does higher spatial resolution rainfall information improve streamflow simulation? An evaluation using 3620 flood events. Hydrol. Earth Syst. Sci. 2014, 18, 575–594. [Google Scholar] [CrossRef] [Green Version]
- Krajewski, W.F.; Smith, J.A. Radar hydrology: Rainfall estimation. Adv. Water Resour. 2002, 25, 1387–1394. [Google Scholar] [CrossRef]
- Atencia, A.; Mediero, L.; Llasat, M.C.; Garrote, L. Effect of radar rainfall time resolution on the predictive capability of a distributed hydrologic model. Hydrol. Earth Syst. Sci. 2011, 15, 3809–3827. [Google Scholar] [CrossRef] [Green Version]
- Cecinati, F.; Rico-Ramirez, M.A.; Heuvelink, G.B.; Han, D. Representing radar rainfall uncertainty with ensembles based on a time-variant geostatistical error modelling approach. J. Hydrol. 2017, 548, 391–405. [Google Scholar] [CrossRef] [Green Version]
- Jain, S.K.; Mani, P.; Jain, S.K.; Prakash, P.; Singh, V.P.; Tullos, D.; Kumar, S.; Agarwal, S.P.; Dimri, A.P. A brief review of flood forecasting techniques and their applications. Int. J. River Basin Manag. 2018, 16, 329–344. [Google Scholar] [CrossRef]
- Gourley, J.J.; Erlingis, J.M.; Hong, Y.; Wells, E.B. Evaluation of tools used for monitoring and forecasting flash floods in the united states. Weather Forecast. 2012, 27, 158–173. [Google Scholar] [CrossRef] [Green Version]
- Singh, V.P. Computer Models of Watershed Hydrology; Water Resources Publications: Baton Rouge, LA, USA, 1995. [Google Scholar]
- Seibert, J.; Vis, M.J. Teaching hydrological modeling with a user-friendly catchment-runoff-model software package. Hydrol. Earth Syst. Sci. 2012, 16, 3315–3325. [Google Scholar] [CrossRef] [Green Version]
- Rientjes, T.H.; Muthuwatta, L.P.; Bos, M.G.; Booij, M.J.; Bhatti, H.A. Multi-variable calibration of a semi-distributed hydrological model using streamflow data and satellite-based evapotranspiration. J. Hydrol. 2013, 505, 276–290. [Google Scholar] [CrossRef]
- Rusli, S.R.; Yudianto, D.; Tao Liu, J. Effects of temporal variability on HBV model calibration. Water Sci. Eng. 2015, 8, 291–300. [Google Scholar] [CrossRef] [Green Version]
- Piotrowski, A.P.; Napiorkowski, J.J.; Osuch, M. Relationship Between Calibration Time and Final Performance of Conceptual Rainfall-Runoff Models. Water Resour. Manag. 2019, 33, 19–37. [Google Scholar] [CrossRef] [Green Version]
- Vincendon, B.; Édouard, S.; Dewaele, H.; Ducrocq, V.; Lespinas, F.; Delrieu, G.; Anquetin, S. Modeling flash floods in southern France for road management purposes. J. Hydrol. 2016, 541, 190–205. [Google Scholar] [CrossRef]
- Seibert, J. Estimation of Parameter Uncertainty in the HBV Model. Nord. Hydrol. 1997, 28, 247–262. [Google Scholar] [CrossRef]
- Gaganis, P. Calibration and Sensitivity Analysis. In Uncertainties in Environmental Modelling and Consequences for Policy Making; Baveye, P., Laba, M., Mysiak, J., Eds.; Springer: Dordrecht, The Netherlands, 2009. [Google Scholar]
- Schalge, B.; Haefliger, V.; Kollet, S.; Simmer, C. Improvement of surface run-off in the hydrological model ParFlow by a scale-consistent river parameterization. Hydrol. Process. 2019, 33, 2006–2019. [Google Scholar] [CrossRef]
- Maxwell, R.M.; Chow, F.K.; Kollet, S.J. The groundwater–land-surface–atmosphere connection: Soil moisture effects on the atmospheric boundary layer in fully-coupled simulations. Adv. Water Resour. 2007, 30, 2447–2466. [Google Scholar] [CrossRef] [Green Version]
- Hally, A.; Caumont, O.; Garrote, L.; Richard, E.; Weerts, A.; Delogu, F.; Fiori, E.; Rebora, N.; Parodi, A.; Mihalović, A.; et al. Hydrometeorological multi-model ensemble simulations of the 4 November 2011 flash flood event in Genoa, Italy, in the framework of the DRIHM project. Nat. Hazards Earth Syst. Sci. 2015, 15, 537–555. [Google Scholar] [CrossRef] [Green Version]
- Kobold, M.; Brilly, M. The use of HBV model for flash flood forecasting. Nat. Hazards Earth Syst. Sci. 2006, 6, 407–417. [Google Scholar] [CrossRef] [Green Version]
- Grillakis, M.G.; Tsanis, I.K.; Koutroulis, A.G. Application of the HBV hydrological model in a flash flood case in Slovenia. Nat. Hazards Earth Syst. Sci. 2010, 10, 2713–2725. [Google Scholar] [CrossRef]
- Adamovic, M.; Branger, F.; Braud, I.; Kralisch, S. Development of a data-driven semi-distributed hydrological model for regional scale catchments prone to Mediterranean flash floods. J. Hydrol. 2016, 541, 173–189. [Google Scholar] [CrossRef]
- Nguyen, P.; Thorstensen, A.; Sorooshian, S.; Hsu, K.; AghaKouchak, A.; Sanders, B.; Koren, V.; Cui, Z.; Smith, M. A high resolution coupled hydrologic–hydraulic model (HiResFlood-UCI) for flash flood modeling. J. Hydrol. 2016, 541, 401–420. [Google Scholar] [CrossRef] [Green Version]
- Hardy, J.; Gourley, J.J.; Kirstetter, P.E.; Hong, Y.; Kong, F.; Flamig, Z.L. A method for probabilistic flash flood forecasting. J. Hydrol. 2016, 541, 480–494. [Google Scholar] [CrossRef] [Green Version]
- Yatheendradas, S.; Wagener, T.; Gupta, H.; Unkrich, C.; Goodrich, D.; Schaffner, M.; Stewart, A. Understanding uncertainty in distributed flash flood forecasting for semiarid regions. Water Resour. Res. 2008, 44, 1–17. [Google Scholar] [CrossRef]
- Moreno, H.A.; Vivoni, E.R.; Gochis, D.J. Limits to Flood Forecasting in the Colorado Front Range for Two Summer Convection Periods Using Radar Nowcasting and a Distributed Hydrologic Model. J. Hydrometeorol. 2013, 14, 1075–1097. [Google Scholar] [CrossRef]
- Rozalis, S.; Morin, E.; Yair, Y.; Price, C. Flash flood prediction using an uncalibrated hydrological model and radar rainfall data in a Mediterranean watershed under changing hydrological conditions. J. Hydrol. 2010, 394, 245–255. [Google Scholar] [CrossRef]
- Bergstrom, S. Principles and confidence in hydrological modelling. Nordic Hydrol. 1991, 22, 123–136. [Google Scholar] [CrossRef]
- Jones, J.E.; Woodward, C.S. Newton-Krylov-multigrid solvers for large-scale, highly heterogeneous, variably saturated flow problems. Adv. Water Resour. 2001, 24, 763–774. [Google Scholar] [CrossRef] [Green Version]
- Kollet, S.J.; Maxwell, R.M. Integrated surface-groundwater flow modeling: A free-surface overland flow boundary condition in a parallel groundwater flow model. Adv. Water Resour. 2006, 29, 945–958. [Google Scholar] [CrossRef] [Green Version]
- Krzysztofowicz, R. The case for probabilistic forecasting in hydrology. J. Hydrol. 2001, 249, 2–9. [Google Scholar] [CrossRef]
- Molteni, F.; Buizza, R.; Palmer, T.N.; Petroliagis, T. The ECMWF ensemble prediction system: Methodology and validation. Q. J. R. Meteorol. Soc. 1996, 122, 73–119. [Google Scholar] [CrossRef]
- Flowerdew, J.; Horsburgh, K.; Wilson, C.; Mylne, K. Development and evaluation of an ensemble forecasting system for coastal storm surges. Q. J. R. Meteorol. Soc. 2010, 136, 1444–1456. [Google Scholar] [CrossRef] [Green Version]
- Mel, R.; Lionello, P. Storm Surge Ensemble Prediction for the City of Venice. Weather Forecast. 2014, 29, 1044–1057. [Google Scholar] [CrossRef]
- Bergström, S. Development and Application of a Conceptual Runoff Model for Scandinavian Catchments; Technical Report; Department of Water Resources Engineering, Lund Institute of Technology, University of Lund: Lund, Sweden, 1976. [Google Scholar]
- Bergström, S. The HBV Model—Its Structure and Applications; Swedish Meteorological and Hydrological Institute: Norrköping, Sweden, 1992; Volume 4, pp. 1–33. [Google Scholar]
- Bárdossy, A. Calibration of hydrological model parameters for ungauged catchments. Hydrol. Earth Syst. Sci. 2007, 11, 703–710. [Google Scholar] [CrossRef] [Green Version]
- Hattermann, F.F.; Krysanova, V.; Gosling, S.N.; Dankers, R.; Daggupati, P.; Donnelly, C.; Flörke, M.; Huang, S.; Motovilov, Y.; Buda, S.; et al. Cross-scale intercomparison of climate change impacts simulated by regional and global hydrological models in eleven large river basins. Clim. Chang. 2017, 141, 561–576. [Google Scholar] [CrossRef]
- Poméon, T.; Jackisch, D.; Diekkrüger, B. Evaluating the performance of remotely sensed and reanalysed precipitation data over West Africa using HBV light. J. Hydrol. 2017, 547, 222–235. [Google Scholar] [CrossRef]
- Häggström, M.; Lindström, G.; Cobos, C.; Martinez, J.R.; Merlos, L.; Alonzo, R.D.; Castillo, G.; Sirias, C.; Miranda, D.; Granados, J.; et al. Application of the HBV model for flood forecasting in six Central American rivers. SMHI Hydrol. 1990, 27, 1–73. [Google Scholar]
- Unduche, F.; Tolossa, H.; Senbeta, D.; Zhu, E. Evaluation of four hydrological models for operational flood forecasting in a Canadian Prairie watershed. Hydrol. Sci. J. 2018, 63, 1133–1149. [Google Scholar] [CrossRef] [Green Version]
- Olsson, J.; Lindström, G. Evaluation and calibration of operational hydrological ensemble forecasts in Sweden. J. Hydrol. 2008, 350, 14–24. [Google Scholar] [CrossRef]
- Ashby, S.; Falgout, R. A Parallel Multigrid Preconditioned Conjugate Gradient Algorithm for Groundwater Flow Simulations. Nucl. Sci. Eng. 1996, 124, 145–159. [Google Scholar] [CrossRef]
- Maxwell, R.M. A terrain-following grid transform and preconditioner for parallel, large-scale, integrated hydrologic modeling. Adv. Water Resour. 2013, 53, 109–117. [Google Scholar] [CrossRef]
- Kollet, S.J.; Maxwell, R.M.; Woodward, C.S.; Smith, S.; Vanderborght, J.; Vereecken, H.; Simmer, C. Proof of concept of regional scale hydrologic simulations at hydrologic resolution utilizing massively parallel computer resources. Water Resour. Res. 2010, 46, 1–7. [Google Scholar] [CrossRef]
- Burstedde, C.; Fonseca, J.A.; Kollet, S. Enhancing speed and scalability of the ParFlow simulation code. Comput. Geosci. 2018, 22, 347–361. [Google Scholar] [CrossRef] [Green Version]
- Richards, L.A. Capillary conduction of liquids through porous mediums. J. Appl. Phys. 1931, 1, 318–333. [Google Scholar] [CrossRef]
- van Genuchten, M.T. Closed-Form Equation for Predicting the Hydraulic Conductivity of Unsaturated Soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- Bartels, H.; Weigl, E.; Reich, T.; Lang, P.; Wagner, A.; Kohler, O.; Gerlach, N. MeteoSolutions GmbH. Projekt RADOLAN—Routineverfahren zur Online-Aneichung der Radarniederschlagsdaten mit Hilfe von automatischen Bodenniederschlagsstationen (Ombrometer); Technical Report; Deutscher Wetterdienst: Offenbach, Germany, 2004. [Google Scholar]
- DWD. Hoch aufgelöste Niederschlagsanalyse und –vorhersage auf der Basis quantitativer Radar- und Ombrometerdaten für grenzüberschreitende Fluss-Einzugsgebiete von Deutschland im Echtzeitbetrieb. Beschreibung des Kompositformats Version 2.4.5; Technical Report; Deutscher Wetterdienst: Offenbach, Germany, 2019. [Google Scholar]
- Diederich, M.; Ryzhkov, A.; Simmer, C.; Zhang, P.; Trömel, S. Use of specific attenuation for rainfall measurement at X-band radar wavelengths. Part I: Radar calibration and partial beam blockage estimation. J. Hydrometeorol. 2015, 16, 487–502. [Google Scholar] [CrossRef]
- Deneke, H.; Diederich, M.; Wapler, K.; Trömel, S.; Simon, J.; Horváth, Á.; Senf, F.; Bick, T. HErZ-OASE Observations and Products Composite File Format Specification; Technical Report; Hans-Ertel-Centre for Weather Research Atmospheric Dynamics and Predictability Branch: Bonn, Germany, 2012. [Google Scholar]
- Ryzhkov, A.; Diederich, M.; Zhang, P.; Simmer, C. Potential utilization of specific attenuation for rainfall estimation, mitigation of partial beam blockage, and radar networking. J. Atmos. Ocean. Technol. 2014, 31, 599–619. [Google Scholar] [CrossRef]
- Diederich, M.; Ryzhkov, A.; Simmer, C.; Zhang, P.; Trömel, S. Use of specific attenuation for rainfall measurement at X-band radar wavelengths. Part II: Rainfall estimates and comparison with rain gauges. J. Hydrometeorol. 2015, 16, 503–516. [Google Scholar] [CrossRef]
- Seed, A.W. A dynamic and spatial scaling approach to advection forecasting. J. Appl. Meteorol. 2003, 42, 381–388. [Google Scholar] [CrossRef]
- Lucas, B.; Kanade, T. An iterative image registration technique with an application to stereo vision. In Proceedings of the 1981 DARPA Imaging Understanding Workshop, Vancouver, BC, Canada, 24–28 August 1981; pp. 121–130. [Google Scholar]
- Bowler, N.E.; Pierce, C.E.; Seed, A.W. STEPS: A probabilistic precipitation forecasting scheme which merges an extrapolation nowcast with downscaled NWP. Q. J. R. Meteorol. Soc. 2006, 132, 2127–2155. [Google Scholar] [CrossRef]
- Lehner, B.; Verdin, K.; Jarvis, A. New global hydrography derived from spaceborne elevation data. Eos 2008, 89, 93–94. [Google Scholar] [CrossRef]
- Hüllen, F. General-Anzeiger Bonn (17.08.2010): 1693 starben in Niederbachem sechs Menschen bei Hochwasser. 2010. Available online: http://www.general-anzeiger-bonn.de/region/1693-starben-in-Niederbachem-sechs-Menschen-bei-Hochwasser-article26360.html (accessed on 1 July 2020).
- Elbern, S.; Franz, R. General-Anzeiger Bonn (20.06.2013): Flutwelle hinterlässt Spur der Verwüstung. 2013. Available online: http://www.general-anzeiger-bonn.de/region/vorgebirge-voreifel/wachtberg/Flutwelle-hinterlässt-Spur-der-Verwüstung-article1078694.html (accessed on 1 July 2020).
- Elbern, S.; Jacob, A. General-Anzeiger Bonn (04.06.2017): Die Angst bei Starkregen bleibt. 2017. Available online: http://www.general-anzeiger-bonn.de/bonn/bad-godesberg/Die-Angst-bei-Starkregen-bleibt-article3571493.html (accessed on 1 July 2020).
- City of Bonn. Starkregen. Schutzmaßnahmen. 2019. Available online: www.bonn.de/themen-entdecken/umwelt-natur/starkregen-schutzmassnahmen.php (accessed on 1 July 2020).
- Heistermann, M.; Jacobi, S.; Pfaff, T. Technical Note: An open source library for processing weather radar data (wradlib). Hydrol. Earth Syst. Sci. 2013, 17, 863–871. [Google Scholar] [CrossRef] [Green Version]
- Natural Resources Conservation Service. National Engineering Handbook: Chapter 7 Hydrologic Soil Groups; United States Department of Agriculture: Washington, DC, USA, 2007. [Google Scholar]
- Naudascher, E. Hydraulik der Gerinne und Gerinnebauwerke, 2nd ed.; Springer: Wien, Austria, 1992. [Google Scholar] [CrossRef]
- Jirka, G.; Lang, C. Einführung in die Gerinnehydraulik; Universitätsverlag Karlsruhe: Karlsruhe, Germany, 2009. [Google Scholar]
- Chow, V. Open Channel Hydraulics; McGraw-Hill Book Company: New York, NY, USA, 1959. [Google Scholar]
- Gneiting, T.; Raftery, A.E. Strictly proper scoring rules, prediction, and estimation. J. Am. Stat. Assoc. 2007, 102, 359–378. [Google Scholar] [CrossRef]
- Boucher, M.A.; Perreault, L.; Anctil, F. Tools for the assessment of hydrological ensemble forecasts obtained by neural networks. J. Hydroinform. 2009, 11, 297–307. [Google Scholar] [CrossRef] [Green Version]
- Seibert, J. Multi-criteria calibration of a conceptual runoff model using a genetic algorithm. Hydrol. Earth Syst. Sci. 2000, 4, 215–224. [Google Scholar] [CrossRef] [Green Version]
- Blöschl, G.; Reszler, C.; Komma, J. A spatially distributed flash flood forecasting model. Environ. Model. Softw. 2008, 23, 464–478. [Google Scholar] [CrossRef]
- DWD. DWD Climate Data Center (CDC): Daily Grids of Potential Evapotranspiration over Grass, Version 0.x, Current Date; Technical Report; German Weather Service: Offenbach, Germany, 2019. [Google Scholar]
- Seibert, J. HBV Light Version 2 User’s Manual; Stockholm University Department of Physical Geography and Quaternary Geology: Stockholm, Sweden, 2005. [Google Scholar]
- Werner, M.; Cranston, M. Understanding the value of radar rainfall nowcasts in flood forecasting and warning in flashy catchments. Meteorol. Appl. 2009, 16, 41–55. [Google Scholar] [CrossRef]
- Furusho-Percot, C.; Goergen, K.; Hartick, C.; Kulkarni, K.; Keune, J.; Kollet, S. Pan-European groundwater to atmosphere terrestrial systems climatology from a physically consistent simulation. Sci. Data 2019, 6, 320. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maxwell, R.M.; Condon, L.E.; Kollet, S.J. A high-resolution simulation of groundwater and surface water over most of the continental US with the integrated hydrologic model ParFlow v3. Geosci. Model. Dev. 2015, 8, 923–937. [Google Scholar] [CrossRef] [Green Version]
- Pappenberger, F.; Matgen, P.; Beven, K.J.; Henry, J.B.; Pfister, L.; Fraipont, P. Influence of uncertain boundary conditions and model structure on flood inundation predictions. Adv. Water Resour. 2006, 29, 1430–1449. [Google Scholar] [CrossRef]
- Ramos, M.H.; Mathevet, T.; Thielen, J.; Pappenberger, F. Communicating uncertainty in hydro-meteorological forecasts: Mission impossible? Meteorol. Appl. 2010, 17, 223–235. [Google Scholar] [CrossRef]
- Pappenberger, F.; Stephens, E.; Thielen, J.; Salamon, P.; Demeritt, D.; van Andel, S.J.; Wetterhall, F.; Alfieri, L. Visualizing probabilistic flood forecast information: Expert preferences and perceptions of best practice in uncertainty communication. Hydrol. Process. 2013, 27, 132–146. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Discharge Levels Exceeded | |||
|---|---|---|---|
| Event | Qmax in m3 s−1 | Level 1 | Level 2 |
| 3 July 2010 | 49.98 | y | y |
| 20 June 2013 | 27.07 | y | y |
| 30 May 2016 | 2.77 | n | n |
| 1 June 2016 | 3.65 | n | n |
| 4 June 2016 | 24.80 | y | y |
| 0.015 | 0.02 | 0.03 | 0.05 | ||
|---|---|---|---|---|---|
| 0_1 | 0_2 | 0_3 | 0_4 | ||
| n | 1_1 | 1_2 | 1_3 | 1_4 | |
| 2_1 | 2_2 | 2_3 | 2_4 | ||
| Total | |||||
|---|---|---|---|---|---|
| Event | (mm/5 min) | RAD | XPol | ||
| 3 July 2010 | 0.92 | 22.9 | 0.50 | 120 | 148 |
| 20 June 2013 | 0.59 | −14.1 | 0.43 | 45 | 39 |
| 30 May 2016 | 0.83 | −2.0 | 0.09 | 27 | 26 |
| 1 June 2016 | 0.70 | 3.7 | 0.11 | 25 | 26 |
| 4 June 2016 | 0.50 | −37.4 | 0.44 | 47 | 29 |
| % of obs. | Ensemble Mean Performance | |||||||
|---|---|---|---|---|---|---|---|---|
| Bracketed | ||||||||
| RADOLAN | 3 July 2010 | 56 | 0.760 (0.047) | 1.267 | 0.85 | 0.85 | −5.9 | 3.46 |
| 20 June 2013 | 37 | 0.588 (0.016) | 0.826 | 0.78 | 0.78 | 4.8 | 1.93 | |
| 30 May 2016 | 57 | 0.193 (0.014) | 0.353 | 0.81 | −0.03 | 75.7 | 0.45 | |
| 1 June 2016 | 38 | 0.243 (0.025) | 0.461 | 0.91 | −0.02 | 84.1 | 0.73 | |
| 4 June 2016 | 57 | 4.007 (0.147) | 5.817 | 0.07 | −28.64 | 374.0 | 19.18 | |
| Mean | 49 | 1.158 (0.050) | 1.745 | 0.68 | −5.41 | 106.5 | 5.15 | |
| XPOL | 3 July 2010 | 48 | 1.056 (0.063) | 1.544 | 0.75 | 0.59 | 31.2 | 5.71 |
| 20 June 2013 | 41 | 0.613 (0.016) | 0.698 | 0.81 | 0.77 | −14.3 | 1.95 | |
| 30 May 2016 | 76 | 0.193 (0.013) | 0.342 | 0.80 | −0.63 | 74.1 | 0.56 | |
| 1 June 2016 | 33 | 0.274 (0.028) | 0.511 | 0.94 | −0.37 | 93.7 | 0.85 | |
| 4 June 2016 | 57 | 1.697 (0.084) | 2.760 | 0.36 | −4.37 | 172.9 | 8.17 | |
| Mean | 51 | 0.767 (0.041) | 1.171 | 0.73 | −0.80 | 71.5 | 3.45 | |
| Ensemble | ||||
|---|---|---|---|---|
| Obs. | Min. | Mean | Max. | |
| 3 July 2010 | ||||
| XPol | 1:30 | 0:25 | 0:35 | 1:40 |
| RADOLAN | 1:25 | 0:30 | 1:30 | 1:35 |
| 20 June 2013 | ||||
| XPol | 2:00 | 0:55 | 1:35 | 2:30 |
| RADOLAN | 2:05 | 0:50 | 1:20 | 2:20 |
| 4 June 2016 | ||||
| XPol | 1:35 | 0:35 | 0:55 | 1:35 |
| RADOLAN | 1:45 | 0:20 | 0:40 | 1:05 |
| HBV MAE in m3 s−1 | ParFlow in m3 s−1 | |||
|---|---|---|---|---|
| Simulation (a) | Simulation (b) | RADOLAN | XPOL | |
| 3 July 2010 | 3.206 | 2.300 | 3.501 | 3.063 |
| 20 June 2013 | 1.706 | 1.499 | 1.821 | 1.857 |
| 30 May 2016 | 0.312 | 0.483 | 0.489 | 0.500 |
| 1 June 2016 | 0.517 | 0.436 | 0.436 | 0.489 |
| 4 June 2016 | 0.948 | 2.384 | 4.268 | 1.798 |
| Mean | 1.338 | 1.420 | 2.103 | 1.541 |
| XPol ZPFC | RADOLAN ZPFC | RADOLAN NC | |||
|---|---|---|---|---|---|
| min | mean | max. | |||
| 3 July 2010 | 2.256 | 2.355 | 1.328 | 1.424 | 1.485 |
| 20 June 2013 | 1.136 | 1.052 | 0.726 | 0.735 | 0.745 |
| 4 June 2016 | 0.995 | 1.708 | 2.108 | 2.269 | 2.440 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poméon, T.; Wagner, N.; Furusho, C.; Kollet, S.; Reinoso-Rondinel, R. Performance of a PDE-Based Hydrologic Model in a Flash Flood Modeling Framework in Sparsely-Gauged Catchments. Water 2020, 12, 2157. https://doi.org/10.3390/w12082157
Poméon T, Wagner N, Furusho C, Kollet S, Reinoso-Rondinel R. Performance of a PDE-Based Hydrologic Model in a Flash Flood Modeling Framework in Sparsely-Gauged Catchments. Water. 2020; 12(8):2157. https://doi.org/10.3390/w12082157
Chicago/Turabian StylePoméon, Thomas, Niklas Wagner, Carina Furusho, Stefan Kollet, and Ricardo Reinoso-Rondinel. 2020. "Performance of a PDE-Based Hydrologic Model in a Flash Flood Modeling Framework in Sparsely-Gauged Catchments" Water 12, no. 8: 2157. https://doi.org/10.3390/w12082157
APA StylePoméon, T., Wagner, N., Furusho, C., Kollet, S., & Reinoso-Rondinel, R. (2020). Performance of a PDE-Based Hydrologic Model in a Flash Flood Modeling Framework in Sparsely-Gauged Catchments. Water, 12(8), 2157. https://doi.org/10.3390/w12082157