Two-Dimensional Free-Surface Flow Modeling for Wave-Structure Interactions and Induced Motions of Floating Bodies




Abstract
1. Introduction
2. Research Methods
2.1. Two-Phase Flows Using Level Set Formulation
2.2. Numerical Formulations
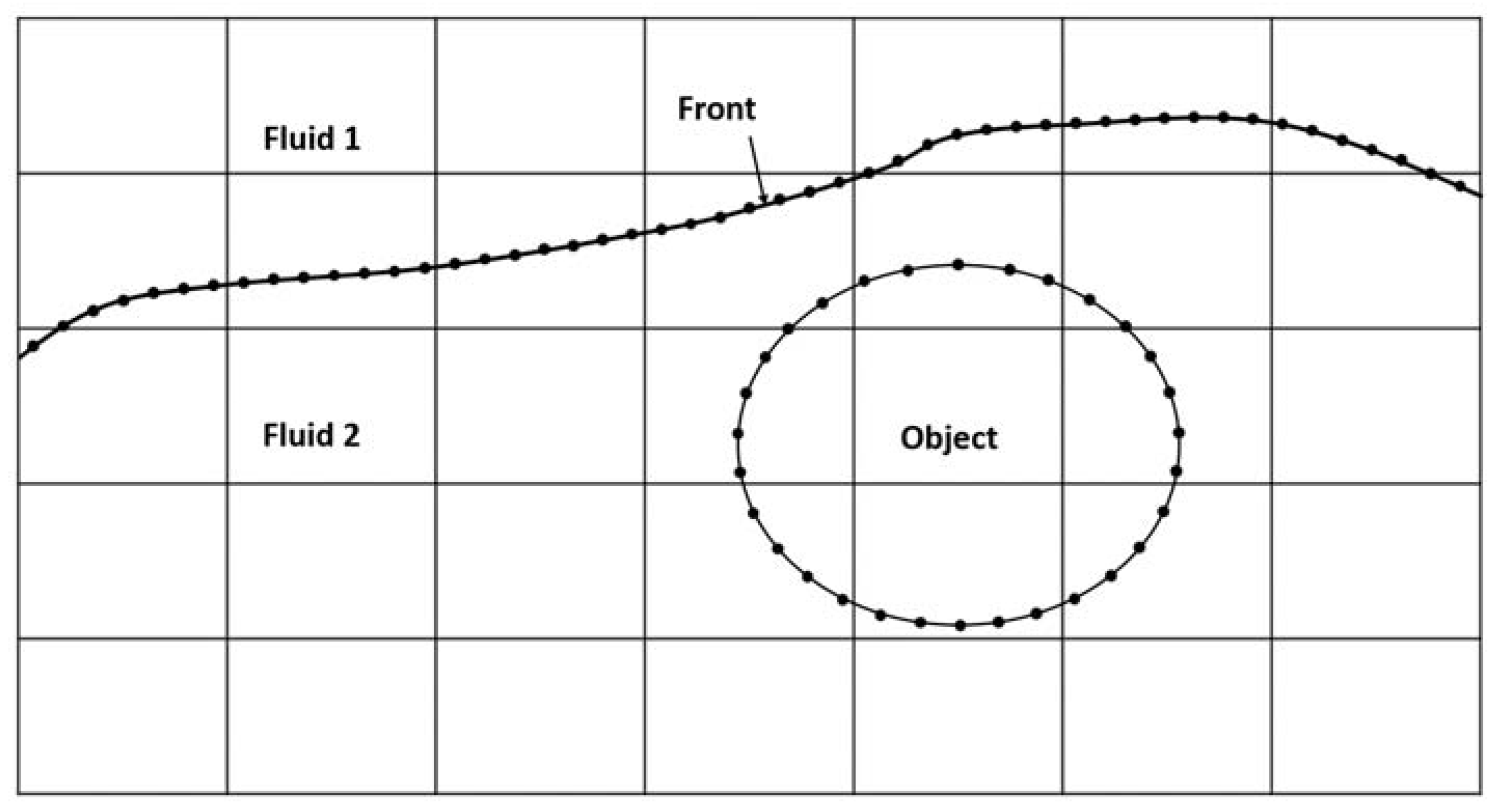
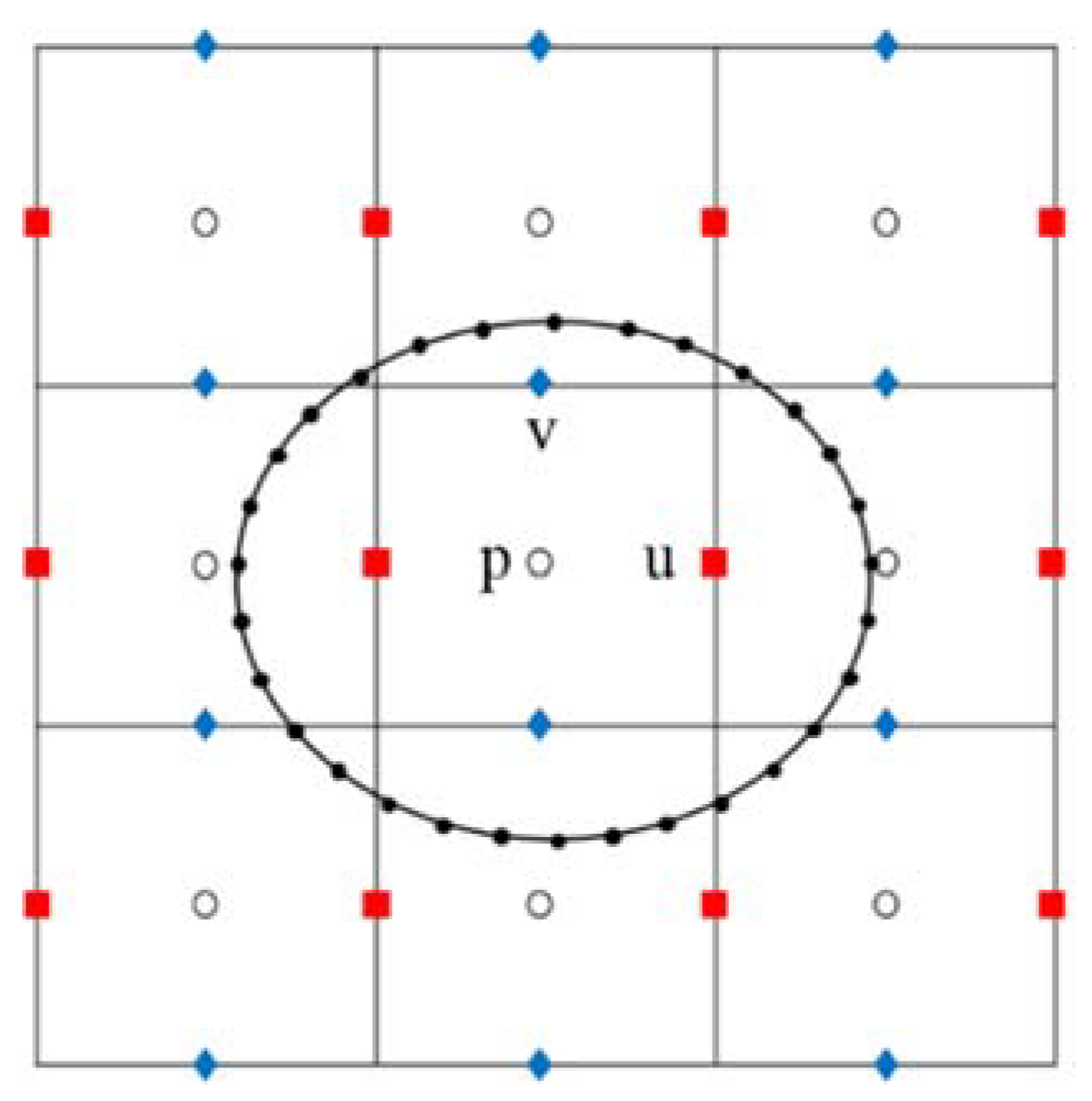
2.3. Immersed Boundary (IB) Method
2.4. Rigid Body Dynamics
3. Results and Discussions
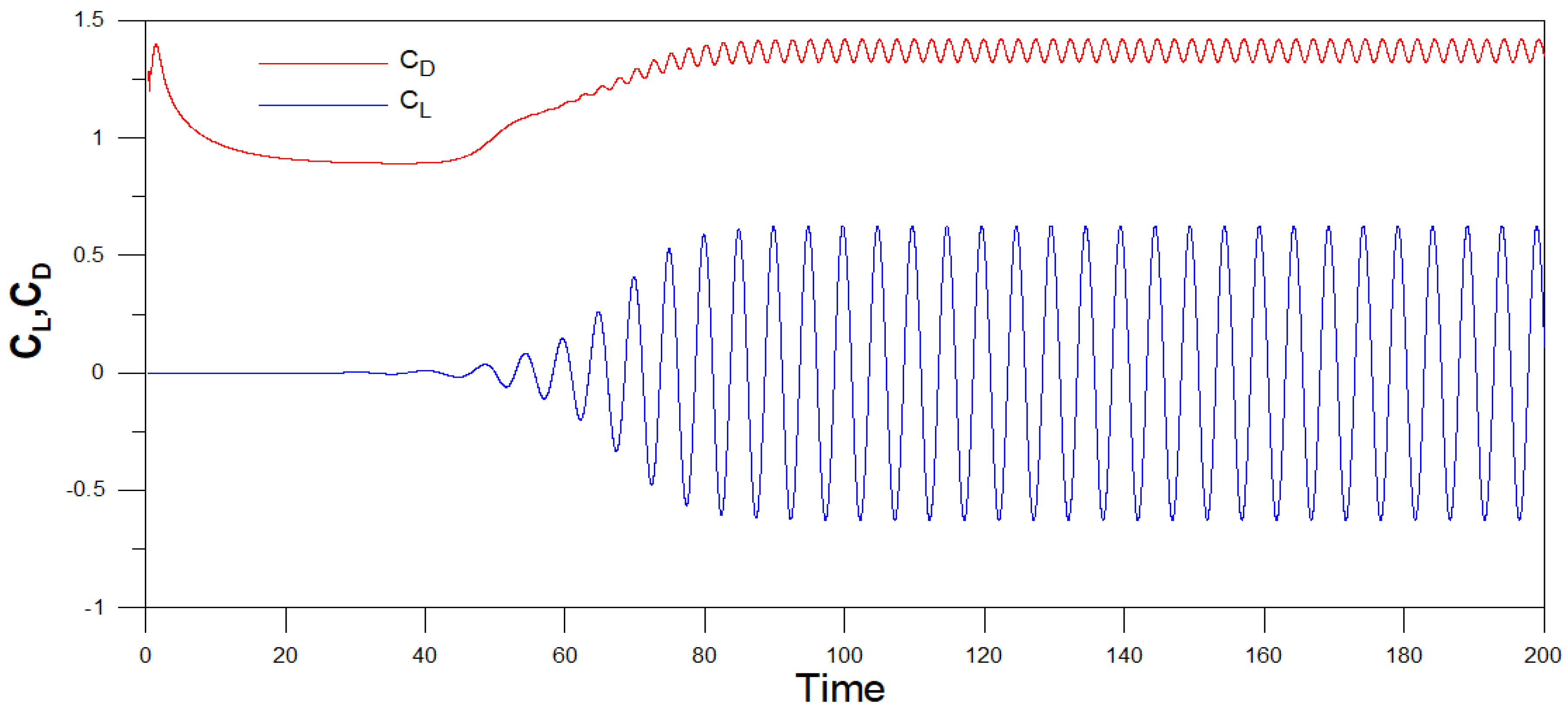
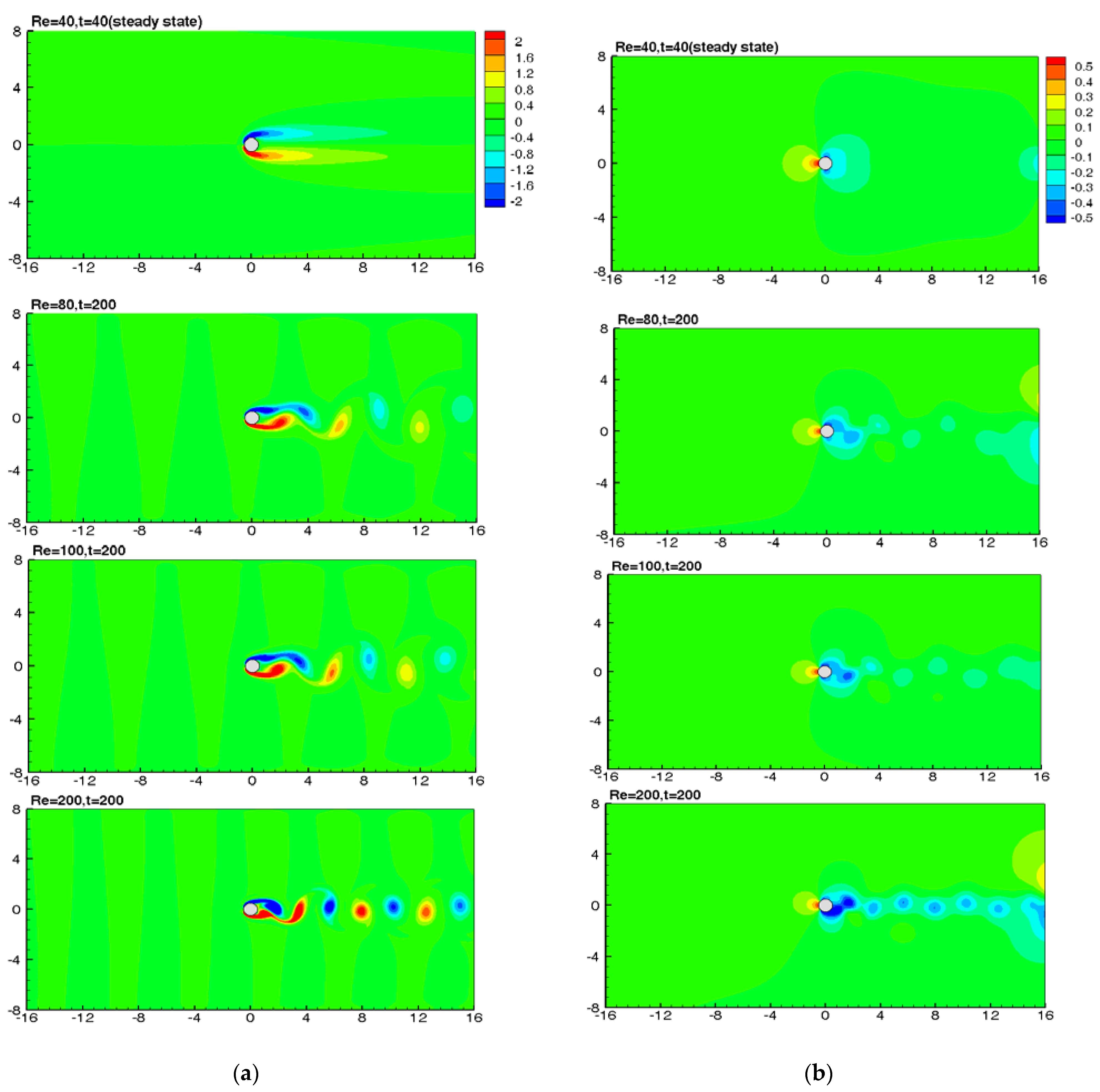
3.1. Flow Passing through a Cylinder
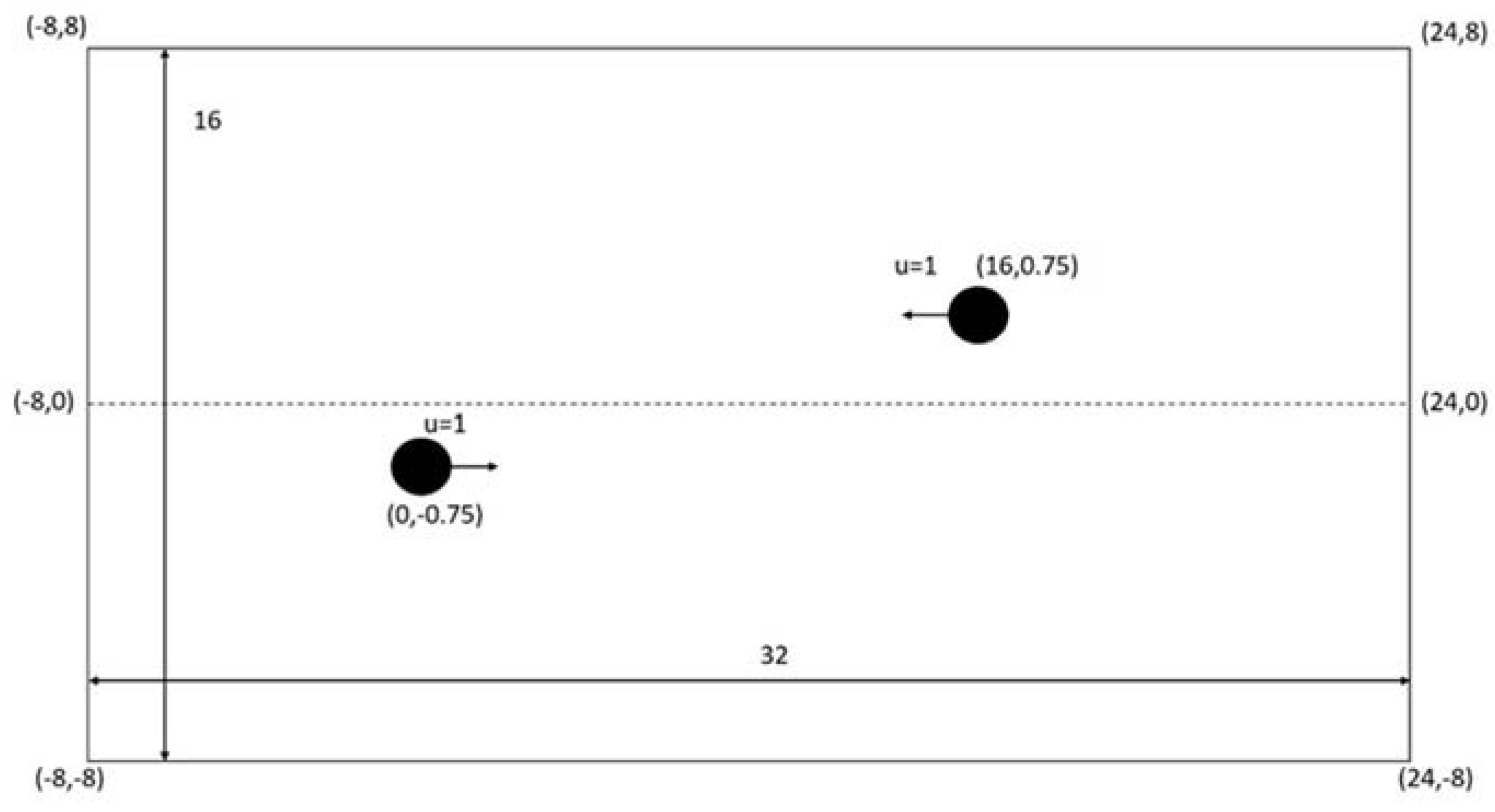
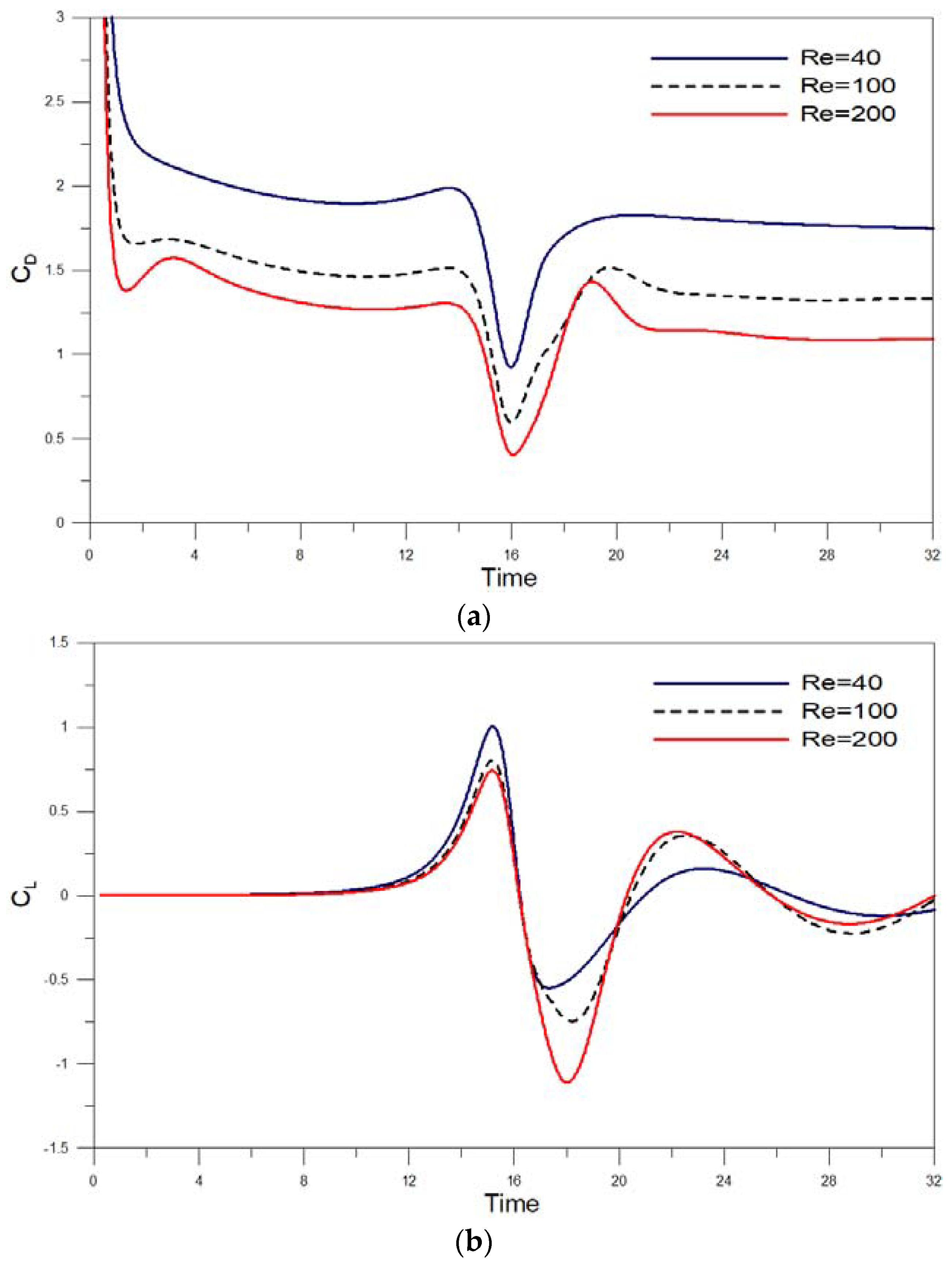
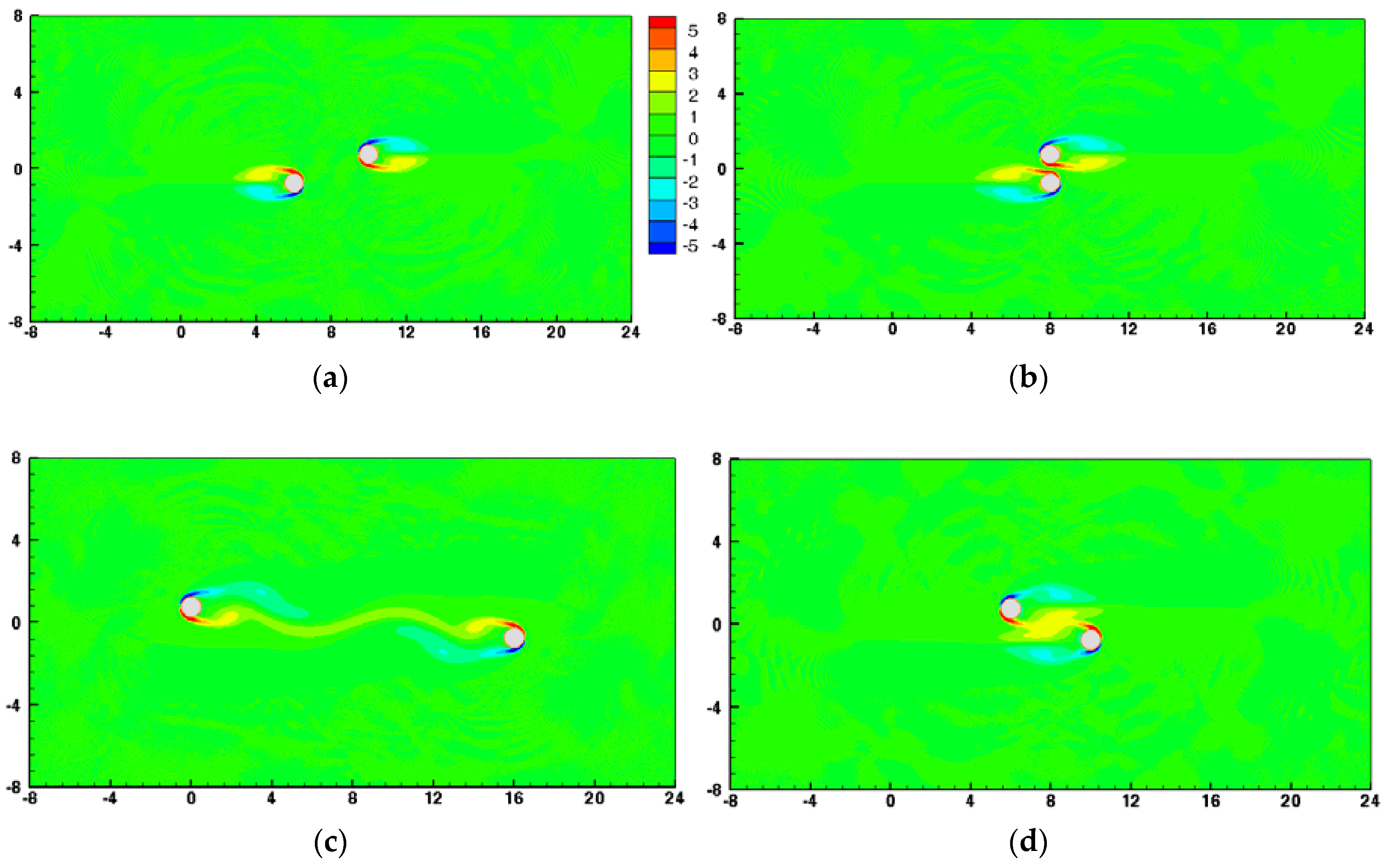
3.2. Two Cylinders Moving Against Each Other in Viscous Fluid
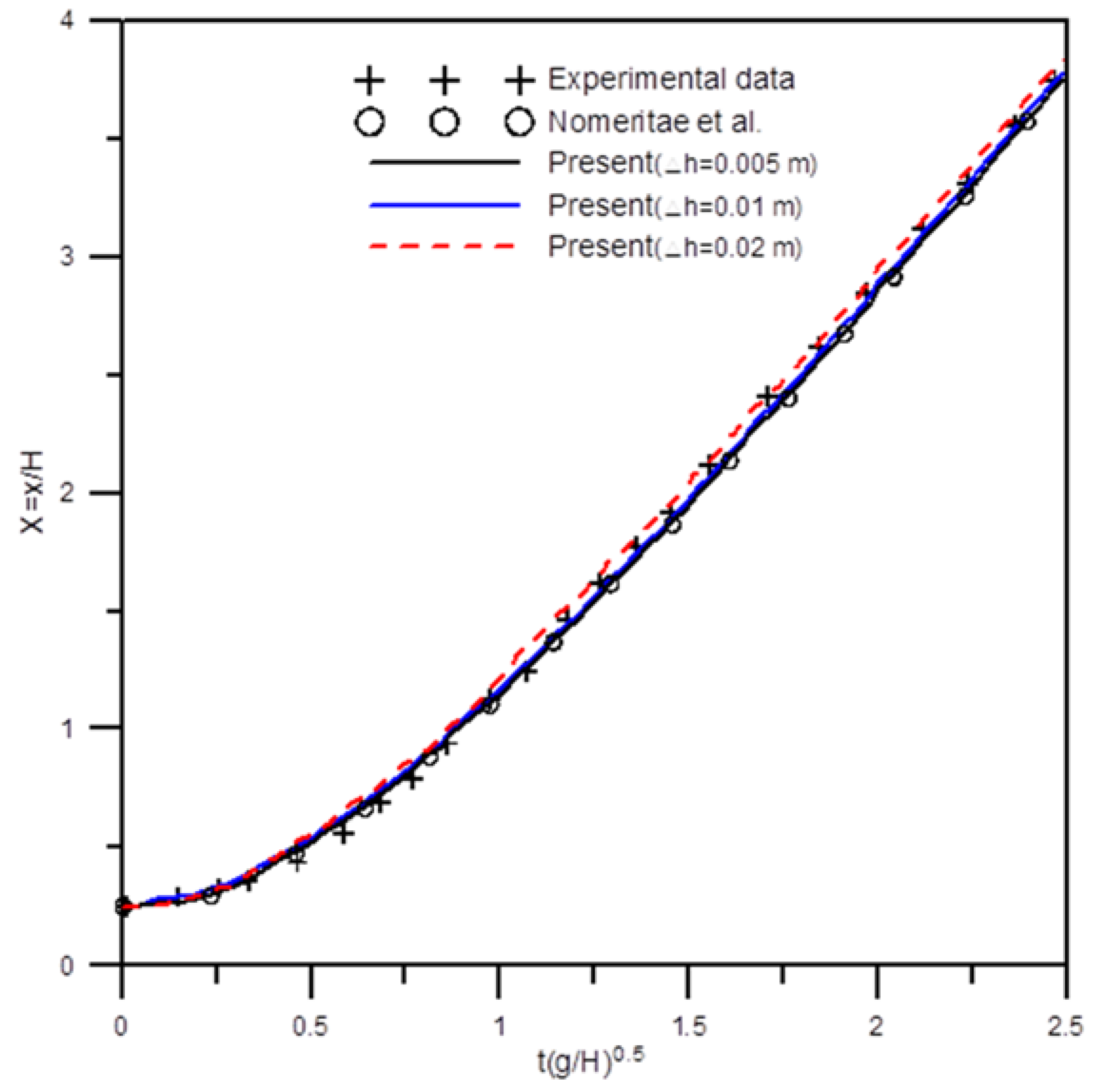
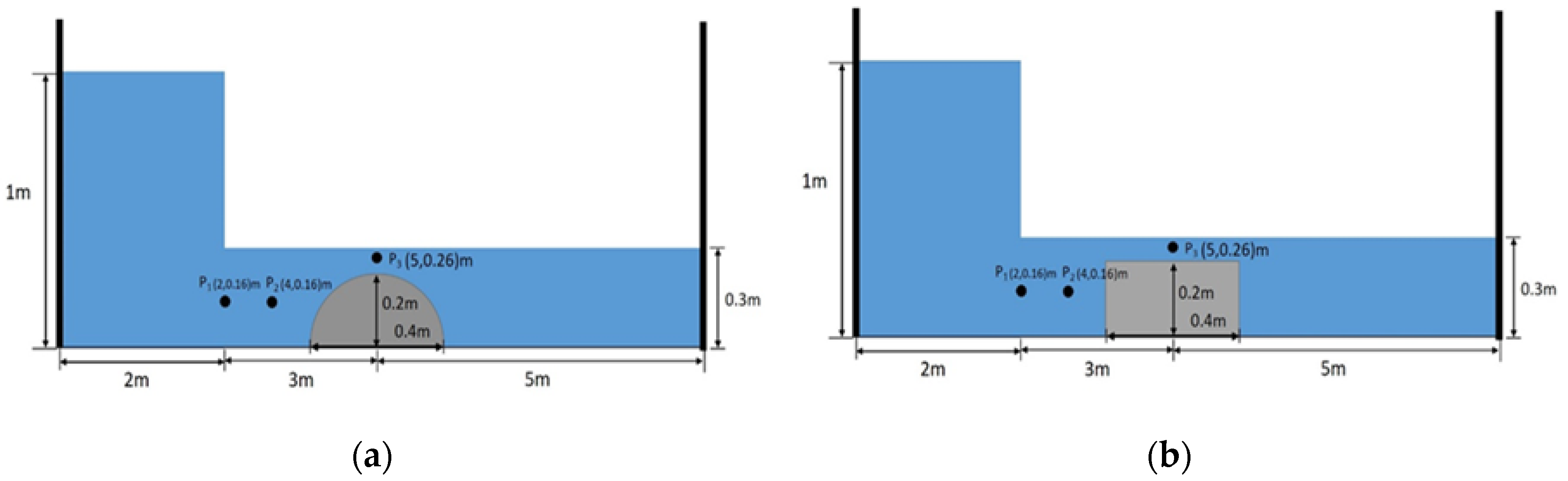
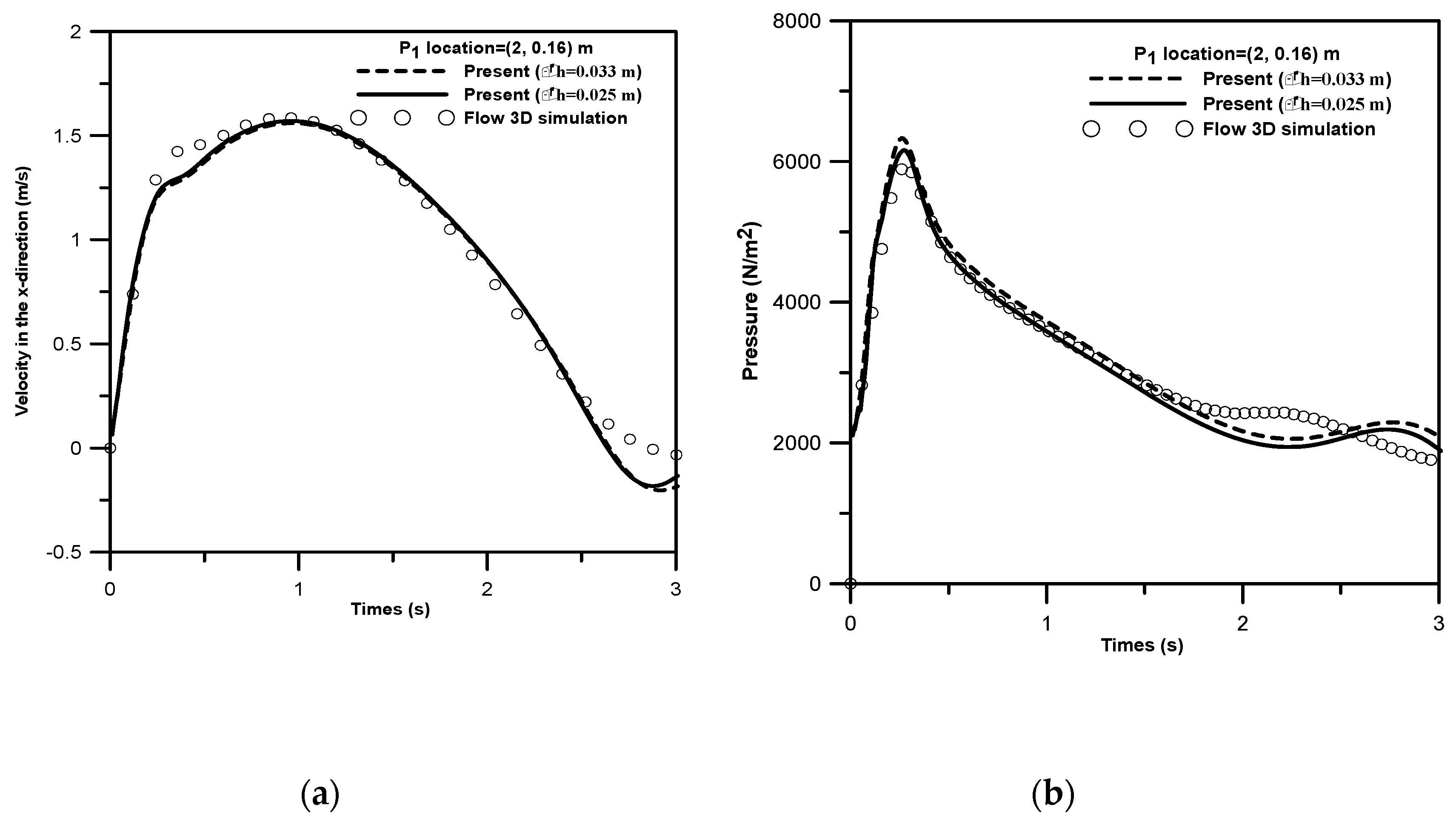
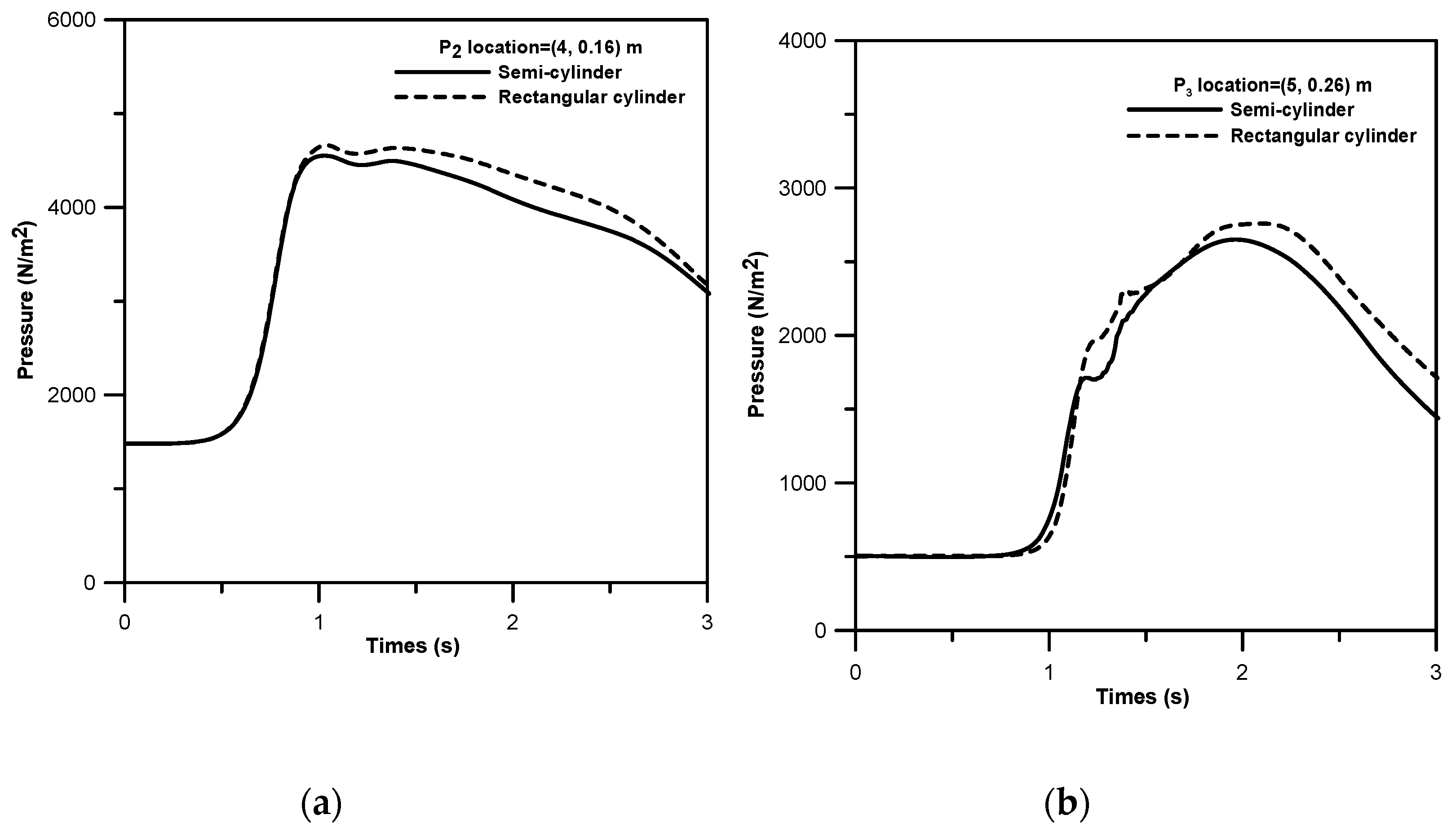
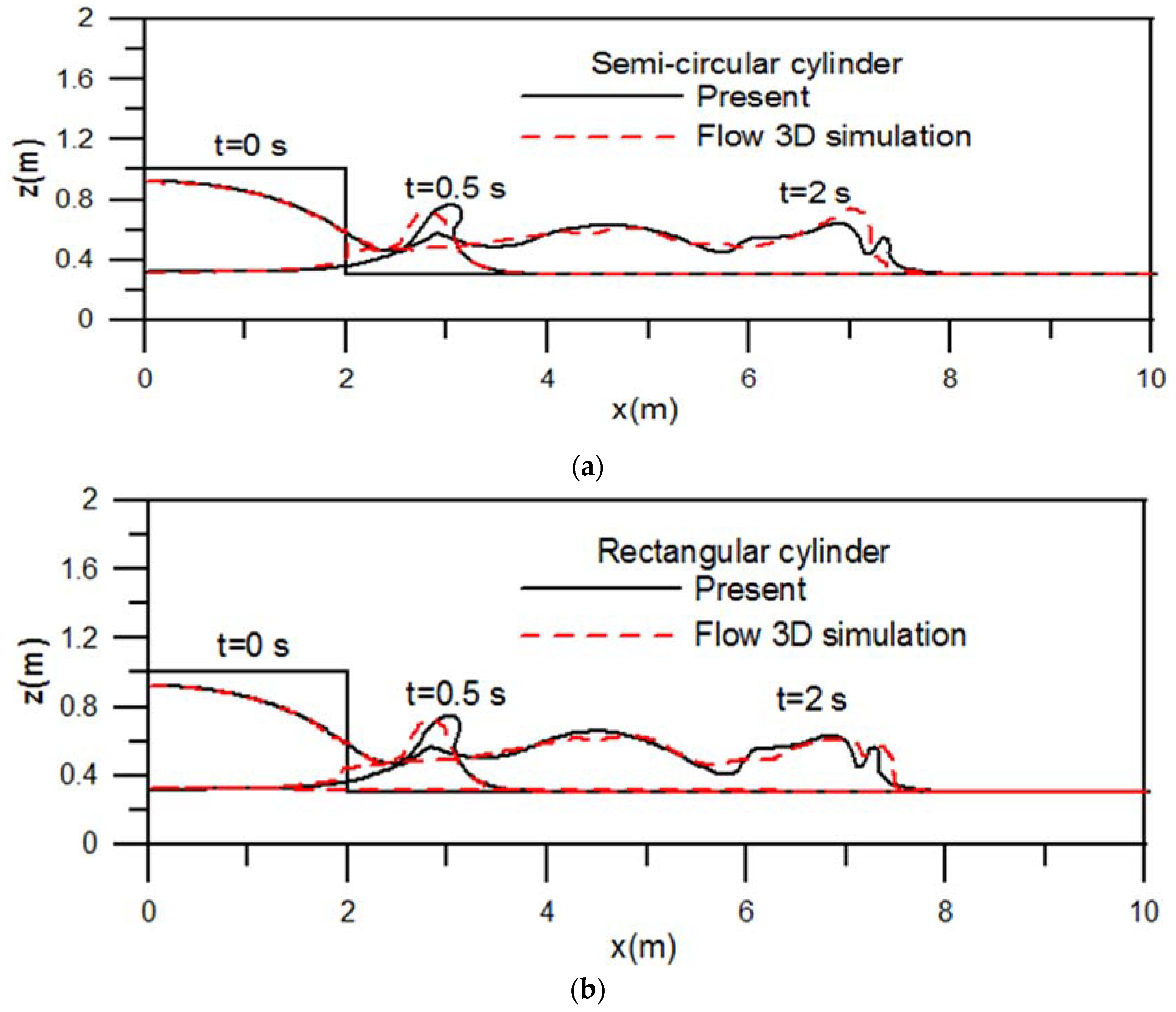
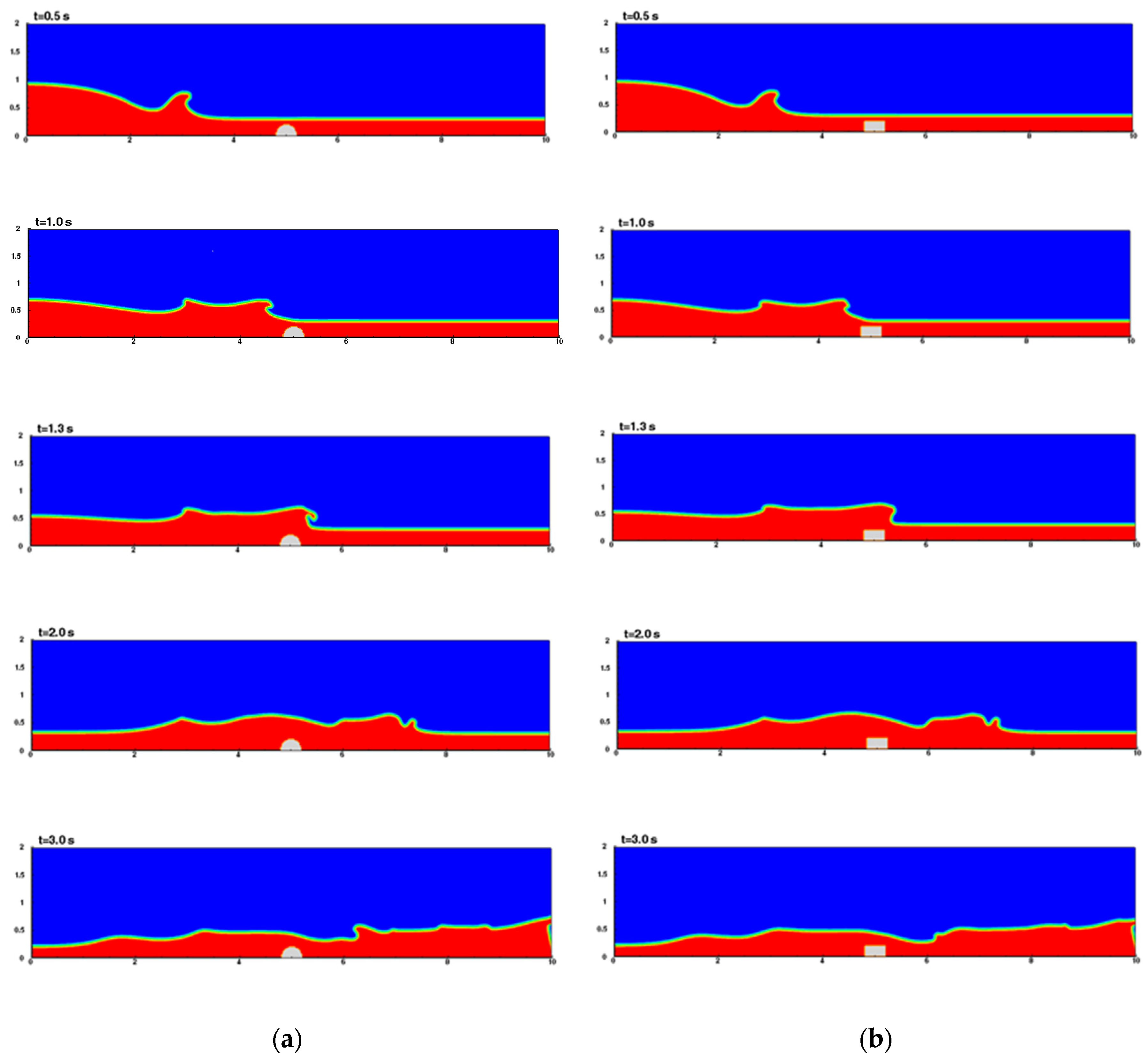
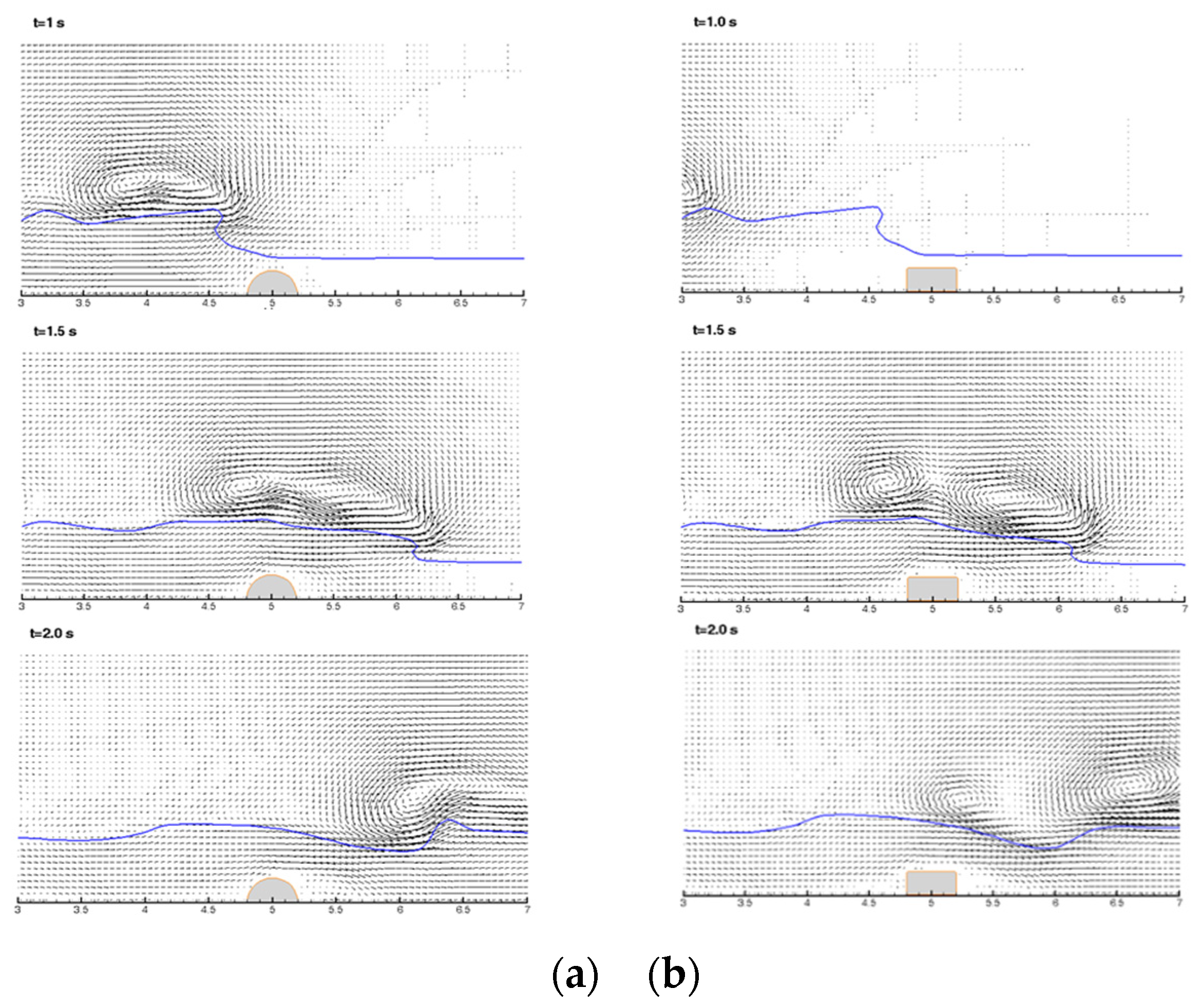
3.3. Dam-Break Problems
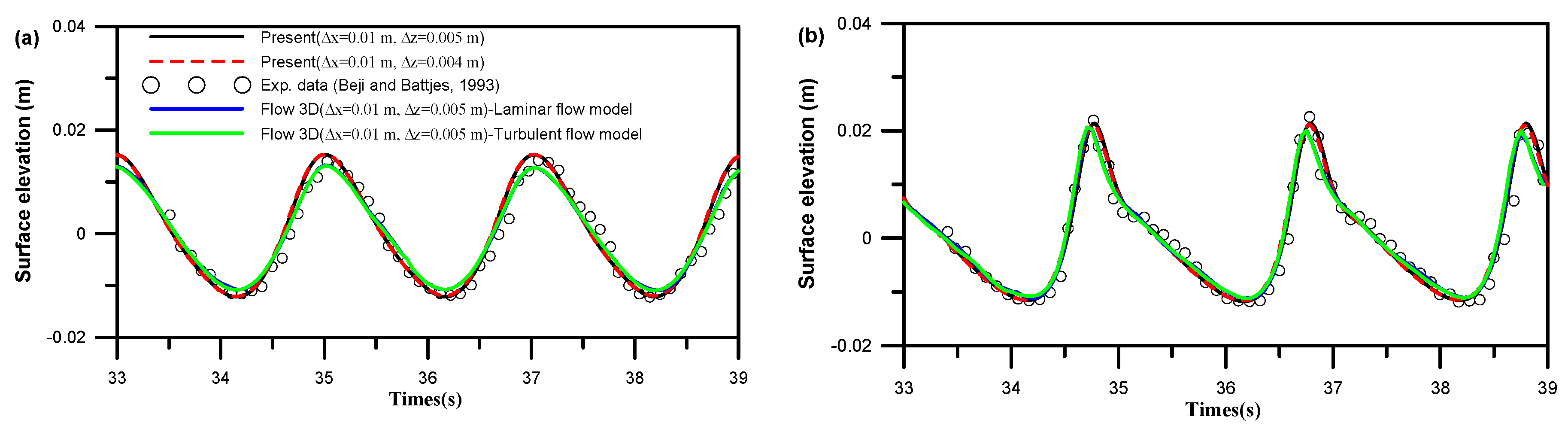
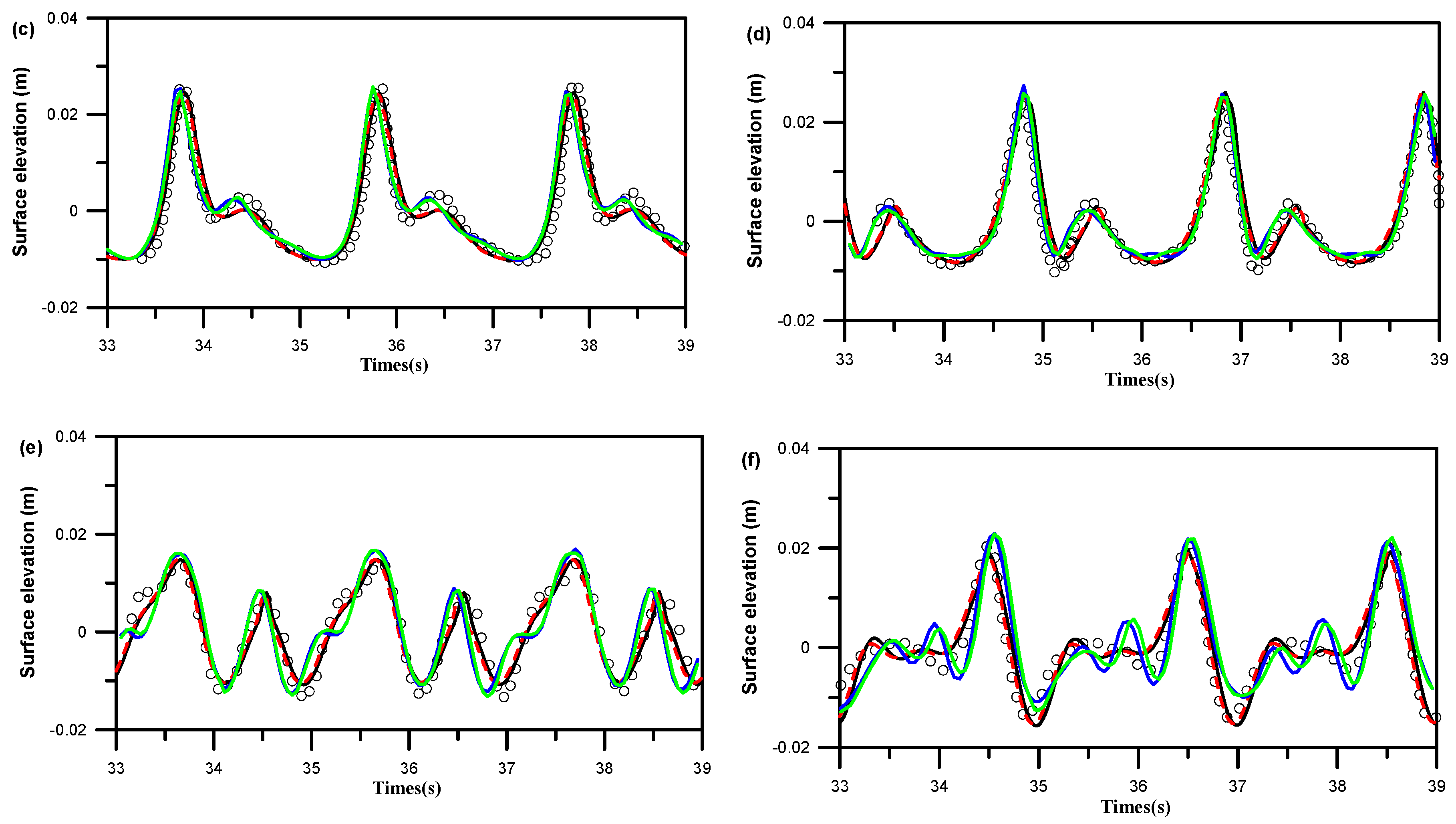
3.4. Wave Decomposition Process over a Submerged Trapezoid Breakwater
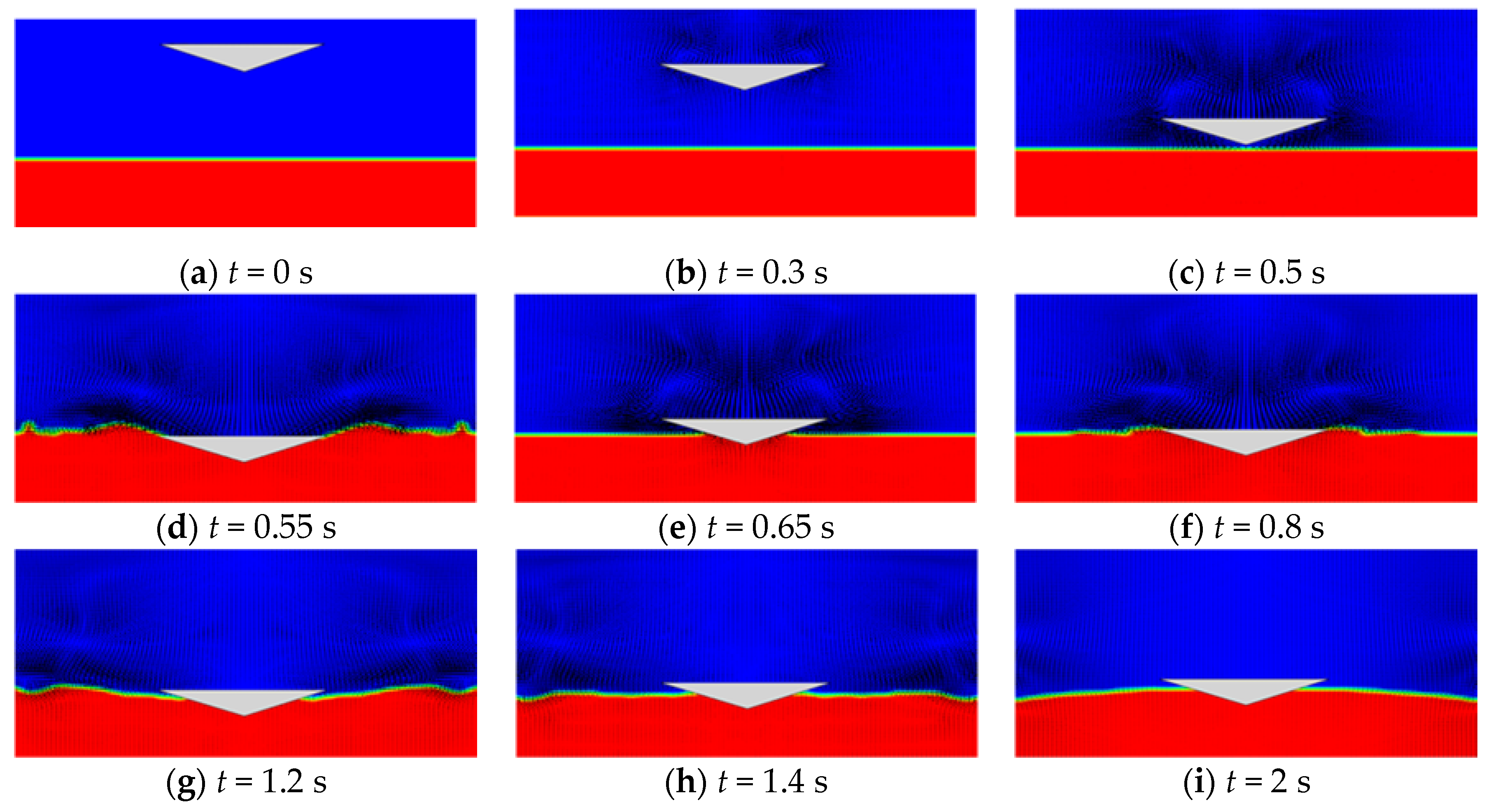
3.5. Free Falling Wedge
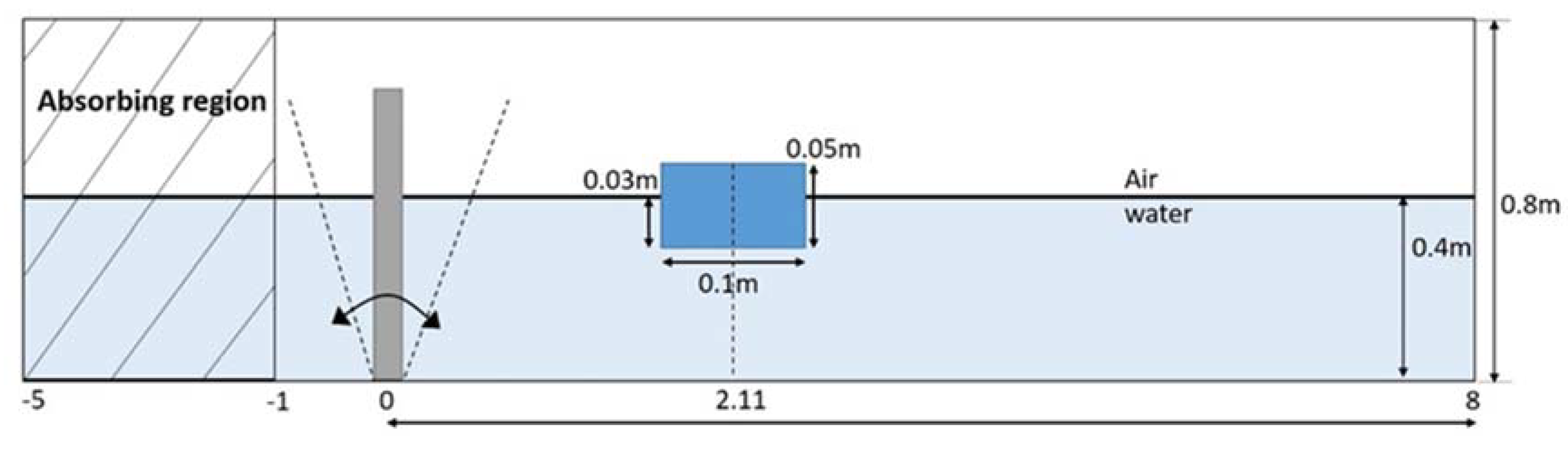
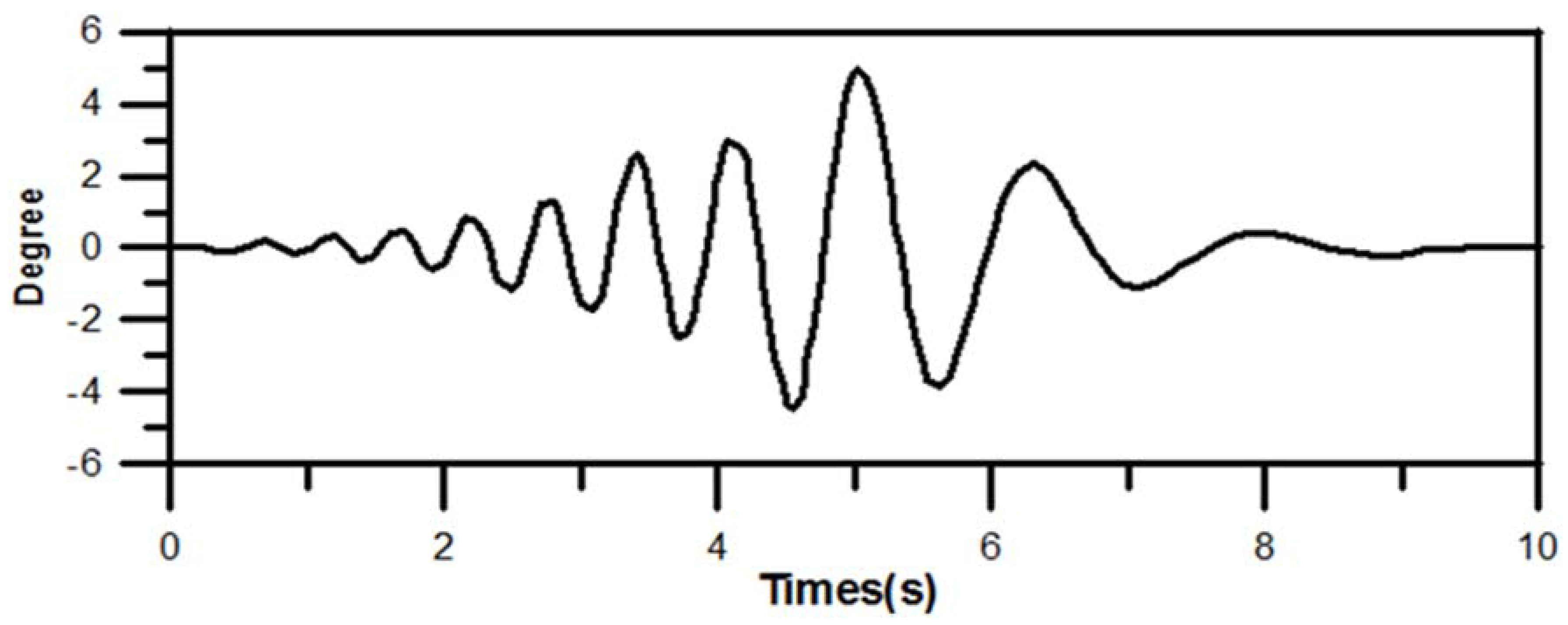
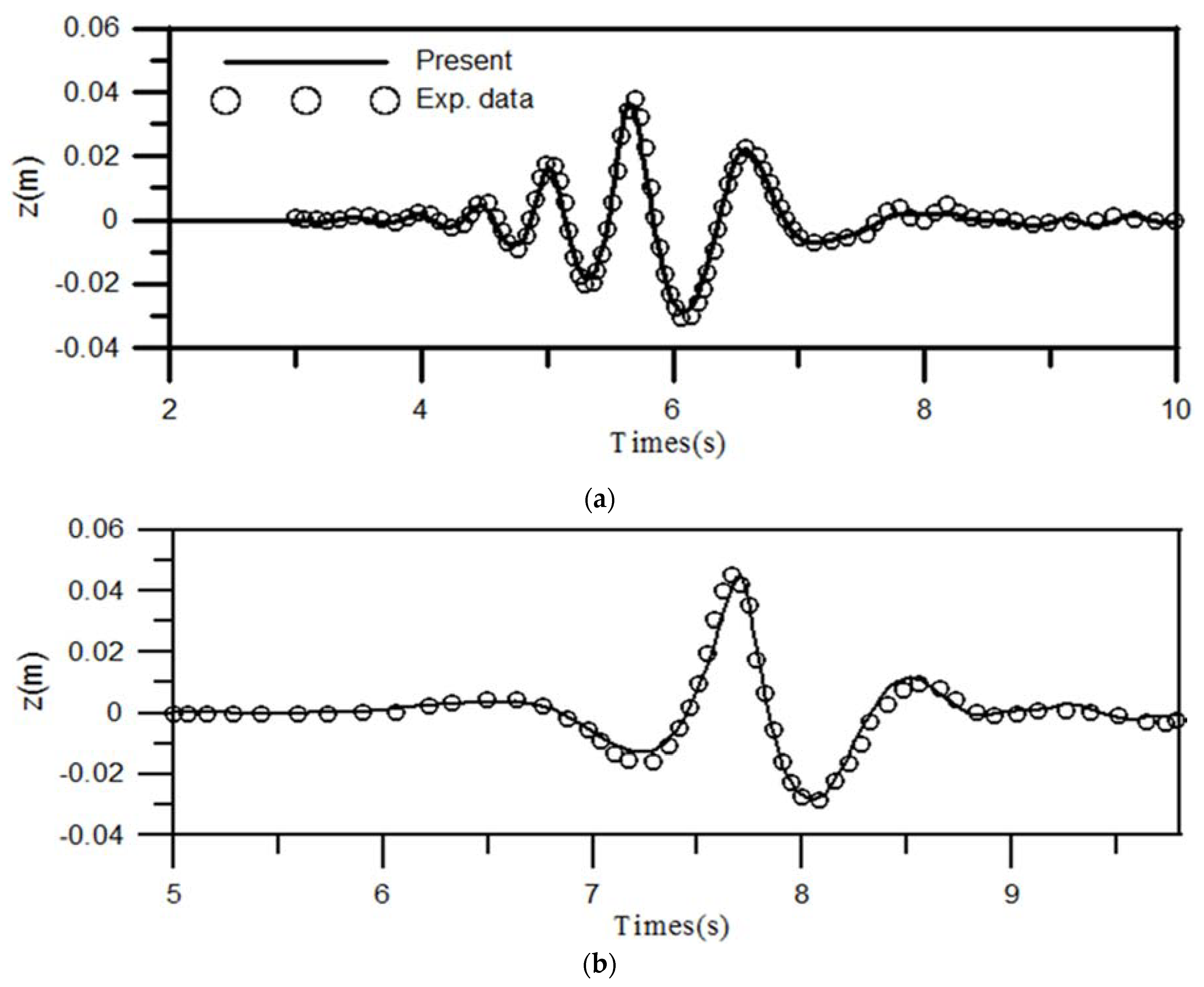
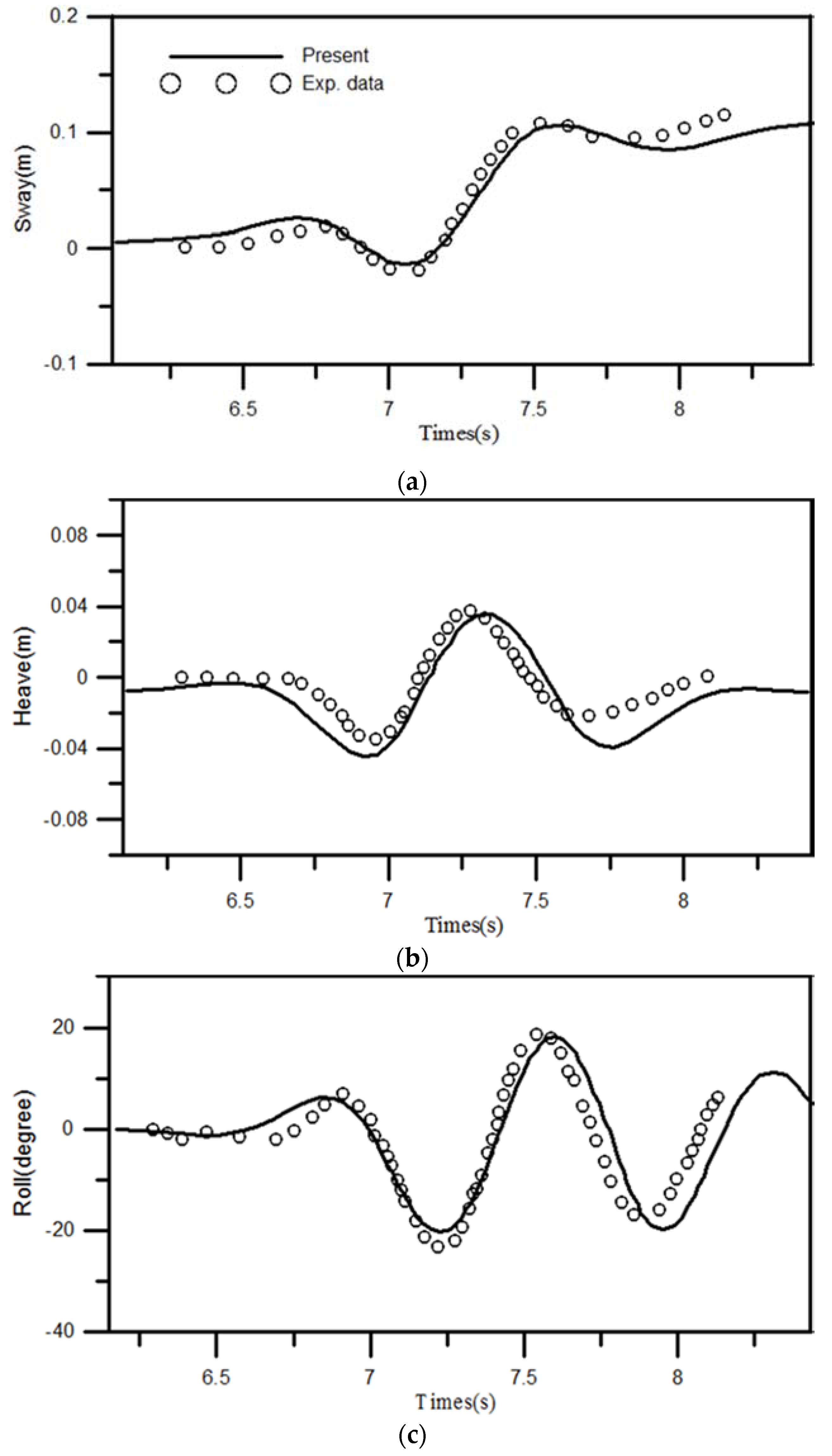
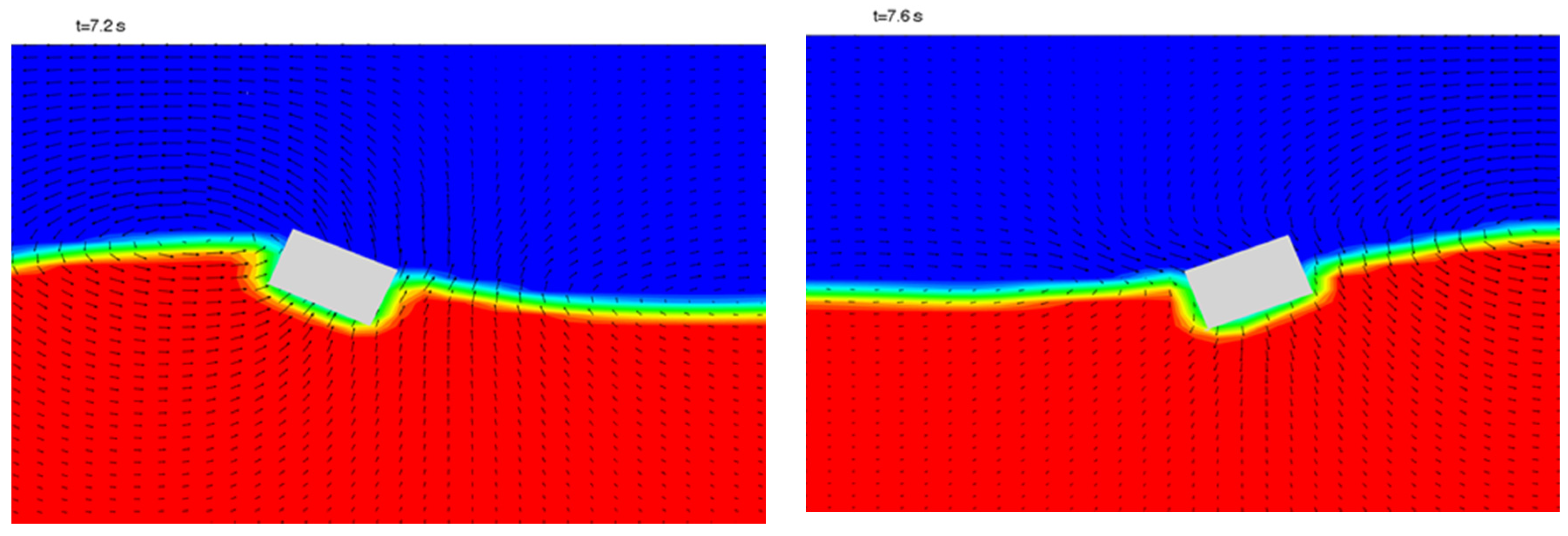
3.6. Wave Packet Interacting with a Floating Body
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| English Symbols | |
| k | curvature of an interface |
| f | hydrodynamic forces |
| wave absorbing coefficient | |
| g | gravitational acceleration vector |
| t | Time |
| velocity vectors | |
| P | Pressure |
| starting position of the absorbing region | |
| length of the absorbing region | |
| velocity vectors at each of the intermediate (between n and n+1) time level | |
| velocity vectors without considering the effect of immersed boundary | |
| force density vector at the Lagrangian points | |
| Lagrangian points with coordinates | |
| Lagrangian point velocity of body | |
| translational velocity vectors of body | |
| body volume | |
| body moment of inertia | |
| position vector relative to the body centroid | |
| D | cylinder diameter |
| U | uniform flow velocity |
| CD | drag coefficient |
| CL | lift coefficient |
| St | Strouhal numbers |
| Greek | |
| Symbols | |
| Dirac delta function | |
| surface tension coefficient | |
| level set function | |
| Heaviside function | |
| fluid density | |
| fluid viscosity | |
| interfacial thickness | |
| control volume defined about the m-th Lagrangian marker | |
| body density | |
| body angular velocity vectors | |
| Re | Reynolds number |
| υ | fluid kinematics viscosity |
References
- Koo, W.; Kim, M.-H. Freely floating-body simulation by a 2D fully nonlinear numerical wave tank. Ocean. Eng. 2004, 31, 2011–2046. [Google Scholar] [CrossRef]
- Finnegan, W.; Goggins, J. Numerical simulation of linear water waves and wave–structure interaction. Ocean Eng. 2012, 43, 23–31. [Google Scholar] [CrossRef]
- Halow, F.H.; Welch, J.E. Numerical calculation of time-dependent viscous incompressible flow of fluid with a free surface. Phys. Fluids 1965, 12, 2182–2189. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nicholas, B.D. Volume of fluid method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Anbarsooz, M.; Passandideh-Fard, M.; Moghiman, M. Fully nonlinear viscous wave generation in numerical wave tanks. Ocean Eng. 2013, 59, 73–85. [Google Scholar] [CrossRef]
- Kang, L.; Jing, Z. Depth-averaged non-hydrostatic hydrodynamic model using a new multithreading parallel computing method. Water 2017, 9, 184. [Google Scholar] [CrossRef]
- Gingold, R.A.; Monaghan, J.J. Smoothed particle hydrodynamics: Theory and application to non-spherical stars. Mon. Not. R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Ramaswamy, B.; Kawahara, M. Lagrangian finite element analysis applied to viscous free surface flow. Int. J. Num. Meth. Fluids 1987, 7, 953–984. [Google Scholar] [CrossRef]
- Hansbo, P. Lagrangian incompressible flow computations in three dimensions by use of space-time finite elements. Int. J. Num. Meth. Fluids 1995, 20, 989–1001. [Google Scholar] [CrossRef]
- Monaghan, J.J. Smoothed particle hydrodynamics and its diverse applications. Annu. Rev. Fluid Mech. 2012, 44, 323–346. [Google Scholar] [CrossRef]
- Hirt, C.W.; Amsden, A.A.; Cook, J.L. An arbitrary Lagrangian Eulerian computing method for all flow speeds. J. Comput. Phys. 1974, 14, 227–253. [Google Scholar] [CrossRef]
- Chan, R.K.C. A generalized arbitrary Lagrangian-Eulerian method for incompressible flows with sharp interfaces. J. Comput. Phys. 1975, 17, 311–331. [Google Scholar] [CrossRef]
- Pracht, W.E. Calculating three-dimensional fluid flows at all speeds with an Eulerian-Lagrangian computing mesh. J. Comput. Phys. 1975, 17, 132–159. [Google Scholar] [CrossRef]
- Hughes, T.J.R.; Liu, W.K.; Zimmerman, T.K. Lagrangian Eulerian finite element formulation for incompressible viscous flows. Comput. Meth. Appl. Mech. Eng. 1981, 29, 329–349. [Google Scholar] [CrossRef]
- Hieu, P.D.; Tanimoto, K. Verification of a VOF-based two-phase flow model for wave breaking and wave-structure interaction. Ocean Eng. 2006, 33, 1565–1588. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on Hamilton–Jacobi formulations (PDF). J. Comput. Phys. 1988, 79, 12–49. [Google Scholar] [CrossRef]
- Osher, S.; Fedkiw, R.P. Level set methods: An overview and some recent results. J. Comput. Phys. 2001, 169, 463–502. [Google Scholar] [CrossRef]
- Osher, S.; Fedkiw, R.P. Level Set Methods and Dynamic Implicit Surfaces; Springer: Berlin, Germany, 2002. [Google Scholar]
- Unverdi, S.O.; Tryggvason, G. A front-tracking method for viscous, incompressible, multi-fluid flows. J. Comput. Phys. 1992, 100, 25–37. [Google Scholar] [CrossRef]
- Agresar, G.; Linderman, J.J.; Tryggvason, G.; Powell, , K.G. An adaptive, Cartesian, front tracking method for the motion, deformation and adhesion of circulating cells. J. Comput. Phys. 1998, 43, 346–380. [Google Scholar] [CrossRef]
- Bunner, B.; Tryggvason, G. Direct Numerical simulations of three-dimensional bubbly flows. Phys. Fluids 1999, 11, 1967–1969. [Google Scholar] [CrossRef]
- Tryggvason, G.; Bunner, B.; Esmaeeli, A.; Juric, C.; Al-Rawahi, N.; Tauber, W.; Han, J.; Nas, S.; Jan, Y.-J. A front-tracking method for the computations of multiphase flow. J. Comput. Phys. 2001, 169, 708–759. [Google Scholar] [CrossRef]
- Peskin, C.S. Flow patterns around heart valves: A numerical method. J. Comput. Phys. 1972, 10, 252–271. [Google Scholar] [CrossRef]
- Peskin, C.S. Numerical-analysis of blood-flow in heart. J. Comput. Phys. 1977, 25, 220–252. [Google Scholar] [CrossRef]
- Roma, A.M.; Peskin, C.S.; Berger, M.J. An adaptive version of the immersed boundary method. J. Comput. Phys. 1999, 153, 509–534. [Google Scholar] [CrossRef]
- Iaccarino, G.; Verzicoo, R. Immersed boundary technique for turbulent flow simulations. Appl. Mech. Rev. 2003, 56, 331–347. [Google Scholar] [CrossRef]
- Tseng, Y.-H.; Ferziger, J.H. A ghost-cell immersed boundary method for flow in complex geometry. J. Comput. Phys. 2003, 192, 593–623. [Google Scholar] [CrossRef]
- Uhlmann, M. An immersed boundary method with direct forcing for the simulation of particulate flows. J. Comput. Phys. 2005, 209, 448–476. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, X.; Li, Z.; He, G.-W. A smoothing technique for discrete delta functions with application to immersed boundary method in moving boundary simulations. J. Comput. Phys. 2009, 228, 7821–7836. [Google Scholar] [CrossRef]
- Simon, G.; Thomas, B.; Dominique, A. A coupled volume-of-fluid/immersed method for the study of propagating waves over complex-shaped bottom: Application to the solitary wave. Comput. Fluids 2016, 131, 56–65. [Google Scholar]
- Lo, D.C.; Lee, C.-P.; Lin, I.-F. An efficient immersed boundary method for fluid flow simulations with moving boundaries. Appl. Math. Comput. 2018, 328, 312–337. [Google Scholar] [CrossRef]
- Liu, X.-D.; Osher, S.; Chan, T. Weighted essentially non-oscillatory schemes. J. Comput. Phys. 1994, 115, 200–212. [Google Scholar] [CrossRef]
- Carrica, P.M.; Wilson, R.V.; Noack, R.W.; Stern, F. Ship motions using single-phase level set with dynamic overset grid. Comput. Fluids 2007, 36, 1415–1433. [Google Scholar] [CrossRef]
- Yang, J.; Wang, Z.; Stern, F. Sharp interface immersed-boundary/level-set method for wave-body interactions. J. Comput. Phys. 2009, 228, 6590–6616. [Google Scholar] [CrossRef]
- Calderer, A.; Kang, S.; Sotiropoulos, F. Level set immersed boundary method for coupled simulation of air/water interaction with complex floating structures. J. Comput. Phys. 2014, 277, 201–227. [Google Scholar] [CrossRef]
- Bihs, H.; Kamath, A. A combined level set/ghost cell immersed boundary representation for floating body simulations. Int. J. Num. Meth. Fluids 2017, 83, 905–916. [Google Scholar] [CrossRef]
- Sethian, J.A.; Smereka, P. Level set methods for fluid interfaces. Annu. Rev. Fluid Mech. 2003, 35, 341–372. [Google Scholar] [CrossRef]
- Sussman, M.; Smereka, P.; Osher, S. A level set approach for computing solutions to incompressible two-phase flow. J. Comput. Phys. 1994, 114, 146–159. [Google Scholar] [CrossRef]
- Lin, P.; Liu, P.L.F. Discussion of vertical variation of the flow across the surf zone. Coast. Eng. 2004, 50, 161–164. [Google Scholar] [CrossRef]
- Chorin, A.J. A numerical method for solving incompressible viscous flow problem. J. Comput. Phys. 1967, 2, 12–26. [Google Scholar] [CrossRef]
- Suzuki, K.; Inamuro, T. Effect of internal mass in the simulation of a moving body by the immersed boundary method. Comput. Fluids 2011, 49, 173–187. [Google Scholar]
- Tritton, D.J. Experiments on the flow past a circular cylinder at low Reynolds number. J. Fluid Mech. 1959, 6, 547–567. [Google Scholar] [CrossRef]
- Calhoun, D.A. Cartesian grid method for solving the two-dimensional streamfunction-vorticity equations in irregular regions. J. Comput. Phys. 2002, 176, 231–275. [Google Scholar] [CrossRef]
- Russel, D.; Wang, Z.J. A Cartesian grid method for modeling multiple moving objects in 2D incompressible viscous flow. J. Comput. Phys. 2003, 191, 177–205. [Google Scholar] [CrossRef]
- Silva, A.A.; Neto, S.; Damasceno, J.J.R. Numerical simulation of two-dimensional flows over a circular cylinder using the immersed boundary method. J. Comput. Phys. 2003, 189, 351–370. [Google Scholar] [CrossRef]
- Xu, S.; Wang, Z.J. An immersed interface method for simulating the interaction of a fluid with moving immersed boundaries. J. Comput. Phys. 2006, 216, 454–493. [Google Scholar] [CrossRef]
- Kolahdouz, E.M.; Bhalla, A.P.S.; Craven, B.A.; Griffith, B.E. An immersed interface method for discrete surfaces. J. Comput. Phys. 2020, 400, 1–37. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Sheng, X.; Sung, C.H. Preconditioned multigrid methods for unsteady incompressible flows. J. Comput. Phys. 1998, 139, 35–57. [Google Scholar] [CrossRef]
- Choi, J.I.; Oberoi, R.C.; Edwards, J.R.; Rosati, J.A. An immersed boundary method for complex incompressible flow. J. Comput. Phys. 2007, 224, 757–784. [Google Scholar] [CrossRef]
- Griffith, B.E.; Luo, X.Y. Hybrid finite difference/finite element version of the immersed boundary method. Int. J. Numer. Methods Biomed. Eng. 2017, 33, e2888. [Google Scholar] [CrossRef]
- Courant, R.; Fredrichs, K.O.; Lewy, H. Über die partiellen differenzengleichungen der mathematischen physik. Math. Ann. 1928, 100, 32. [Google Scholar] [CrossRef]
- Martin, J.; Moyce, W. Part IV. An experimental study of the collapse of liquid columns on a rigid horizontal plane. Philos. R. Soc. London. A Math. Phys. Eng. Sci. 1952, 244, 312–324. [Google Scholar]
- Nomeritae; Edoardo, D.; Stefania, G.; Ha, H.B. Explicit incompressible SPH algorithm for free-surface flow modelling: A comparison with weakly compressible schemes. Adv. Water Resour. 2016, 97, 156–167. [Google Scholar] [CrossRef]
- Beji, S.; Battjes, J.A. Experimental investigation of wave propagation over a bar. Coast. Eng. 1993, 19, 151–162. [Google Scholar] [CrossRef]
- Dean, R.G.; Dalrymple, R.A. Water Wave Mechanics for Engineers and Scientists; World Scientific Publishing Company: Singapore, 1984. [Google Scholar]
- Yettou, E.M.; Desrochers, Y.; Champoux, Y. Experimental study on the water impact of a symmetrical wedge. Fluid Dyn. Res. 2006, 38, 47–66. [Google Scholar] [CrossRef]
- Hadzic, I.; Hennig, J.; Peric, M.; Xing-Kaeding, Y. Computation of flow induced motion of floating bodies. Appl. Math. Model. 2005, 29, 1196–1210. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Re = 20 | Re = 40 | ||
|---|---|---|---|---|
| CD | Lw | CD | Lw | |
| Tritton [42] | 2.22 | - | 1.48 | - |
| Calhoun [43] | 2.19 | 0.91 | 1.62 | 2.18 |
| Russel and Wang [44] | 2.22 | 0.94 | 1.63 | 2.35 |
| Silva et al. [45] | 2.04 | 1.04 | 1.54 | 2.55 |
| Xu and Wang [46] | 2.23 | 0.92 | 1.66 | 2.21 |
| Kolahdouz et al. [47] | 2.10 | 0.93 | 1.58 | 2.31 |
| Present ∆h = 1/30 Present ∆h = 1/40 | 2.15 2.15 | 0.94 0.94 | 1.57 1.57 | 2.25 2.25 |
| Authors | Re = 100 | Re = 200 | ||||
|---|---|---|---|---|---|---|
| CD | CL | St | CD | CL | St | |
| Calhoun [43] | 1.3300.014 | 0.298 | - | 1.1720.058 | 0.668 | - |
| Xu and Wang [46] | 1.4230.013 | 0.340 | 0.171 | 1.4200.040 | 0.66 | 0.202 |
| Kolahdouz et al. [47] | 1.3700.015 | 0.351 | 0.168 | 1.390 0.060 | 0.75 | 0.198 |
| Liu et al. [48] | 1.3500.012 | 0.339 | 0.164 | 1.1700.058 | 0.67 | 0.202 |
| Choi et al. [49] | 1.3400.011 | 0.315 | 0164 | 1.3600.048 | 0.64 | 0.191 |
| Griffith and Luo [50] | - | - | - | 1.3600.046 | 0.70 | 0.195 |
| Present ∆h = 1/50 | 1.4000.014 | 0.341 | 0.166 | 1.3800.050 | 0.67 | 0.199 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lo, D.-C.; Wang, K.-H.; Hsu, T.-W. Two-Dimensional Free-Surface Flow Modeling for Wave-Structure Interactions and Induced Motions of Floating Bodies. Water 2020, 12, 543. https://doi.org/10.3390/w12020543
Lo D-C, Wang K-H, Hsu T-W. Two-Dimensional Free-Surface Flow Modeling for Wave-Structure Interactions and Induced Motions of Floating Bodies. Water. 2020; 12(2):543. https://doi.org/10.3390/w12020543
Chicago/Turabian StyleLo, Der-Chang, Keh-Han Wang, and Tai-Wen Hsu. 2020. "Two-Dimensional Free-Surface Flow Modeling for Wave-Structure Interactions and Induced Motions of Floating Bodies" Water 12, no. 2: 543. https://doi.org/10.3390/w12020543
APA StyleLo, D.-C., Wang, K.-H., & Hsu, T.-W. (2020). Two-Dimensional Free-Surface Flow Modeling for Wave-Structure Interactions and Induced Motions of Floating Bodies. Water, 12(2), 543. https://doi.org/10.3390/w12020543