Inventory and Connectivity Assessment of Wetlands in Northern Landscapes with a Depression-Based DEM Method





Abstract
:1. Introduction
2. Material and Methods
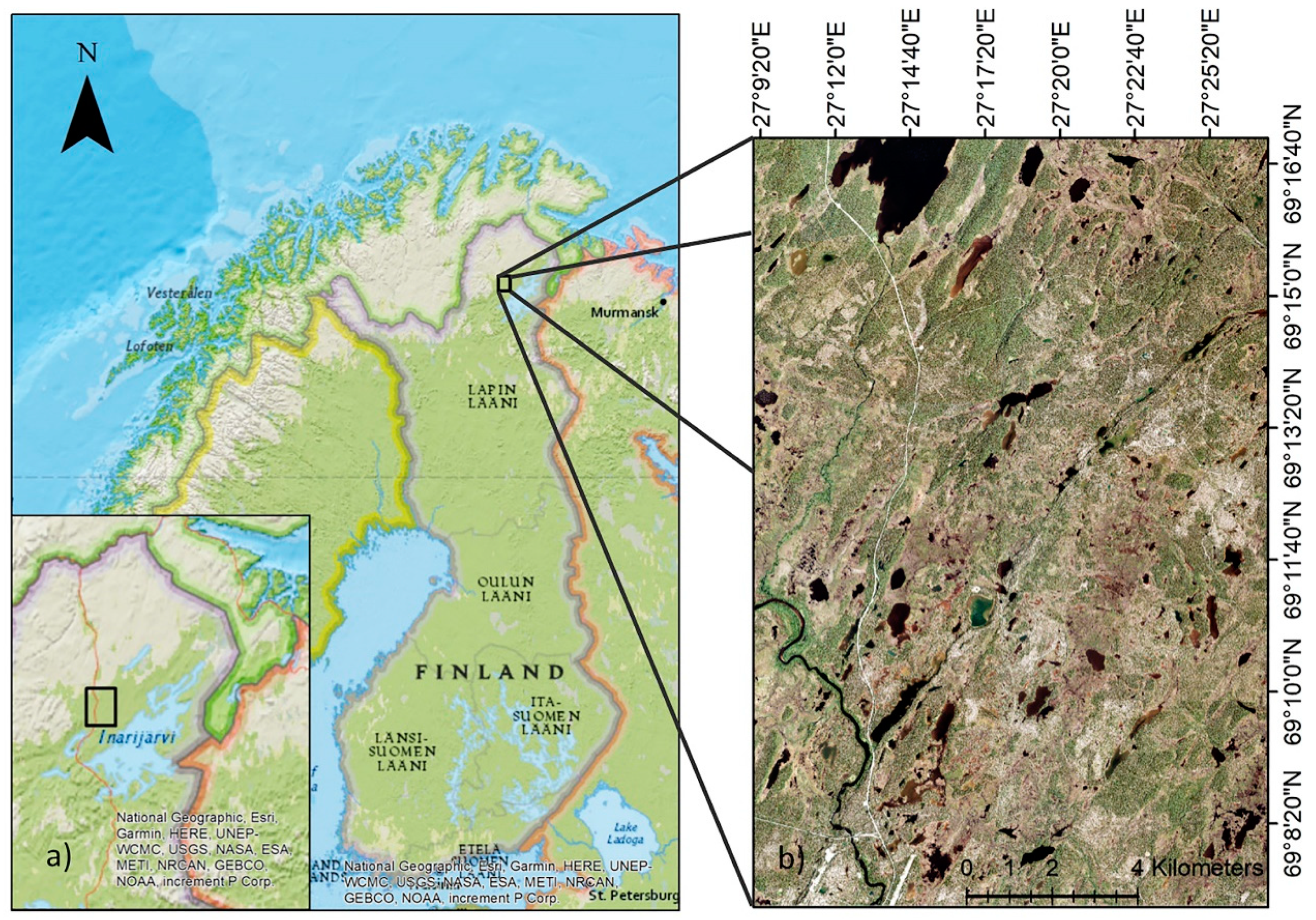
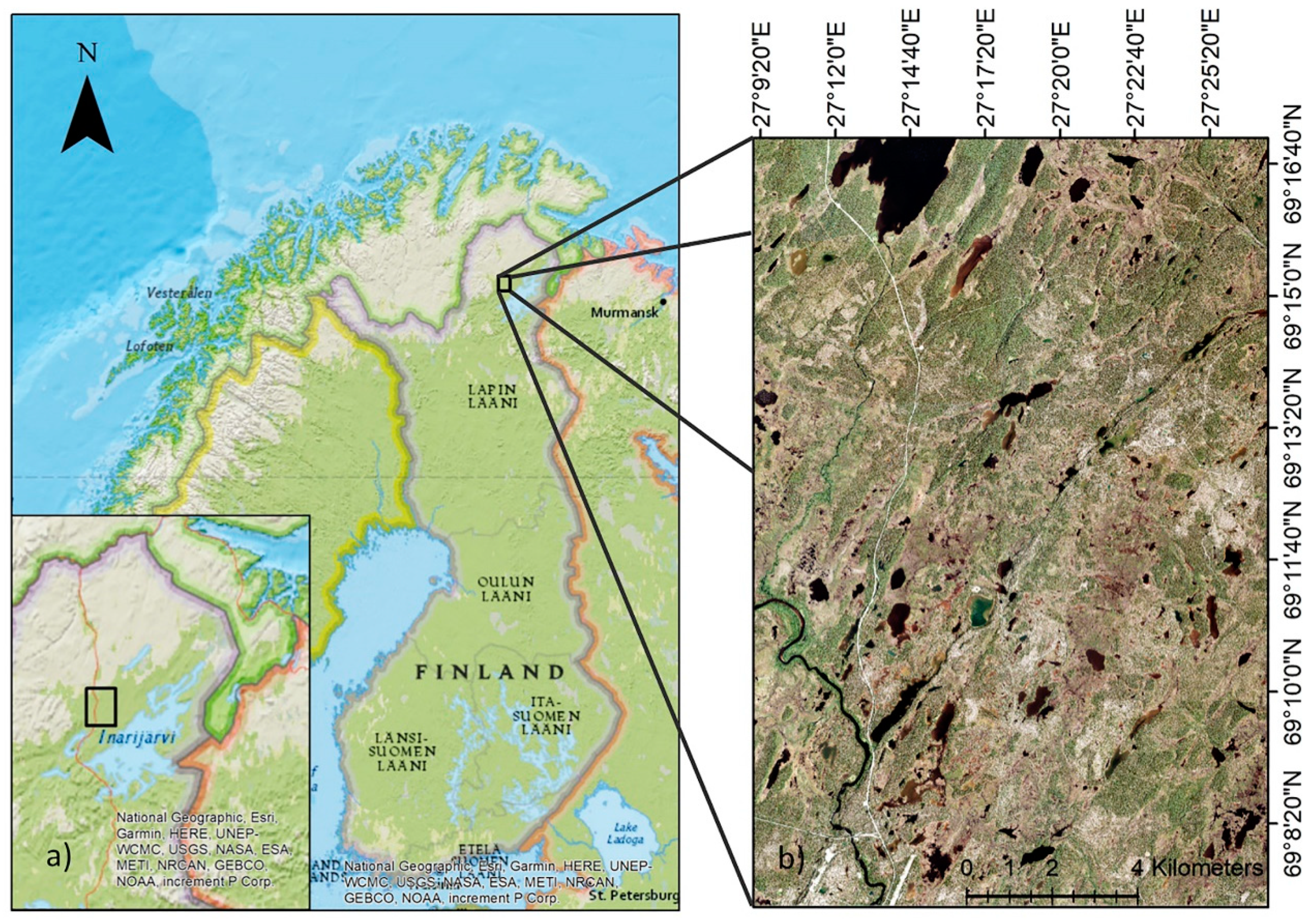
2.1. Study Site
2.2. Mapping Wetlands
2.2.1. Data Acquisition and Pre-Processing
2.2.2. Identification and Mapping of Wetlands
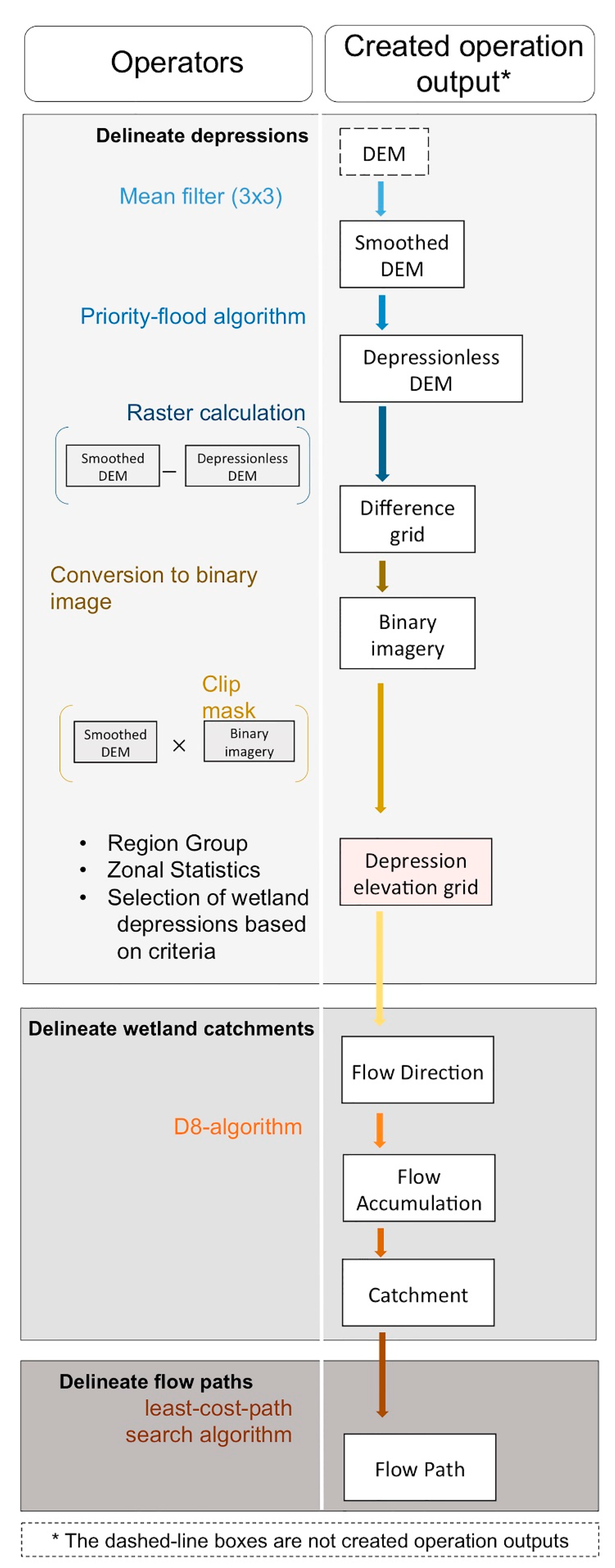
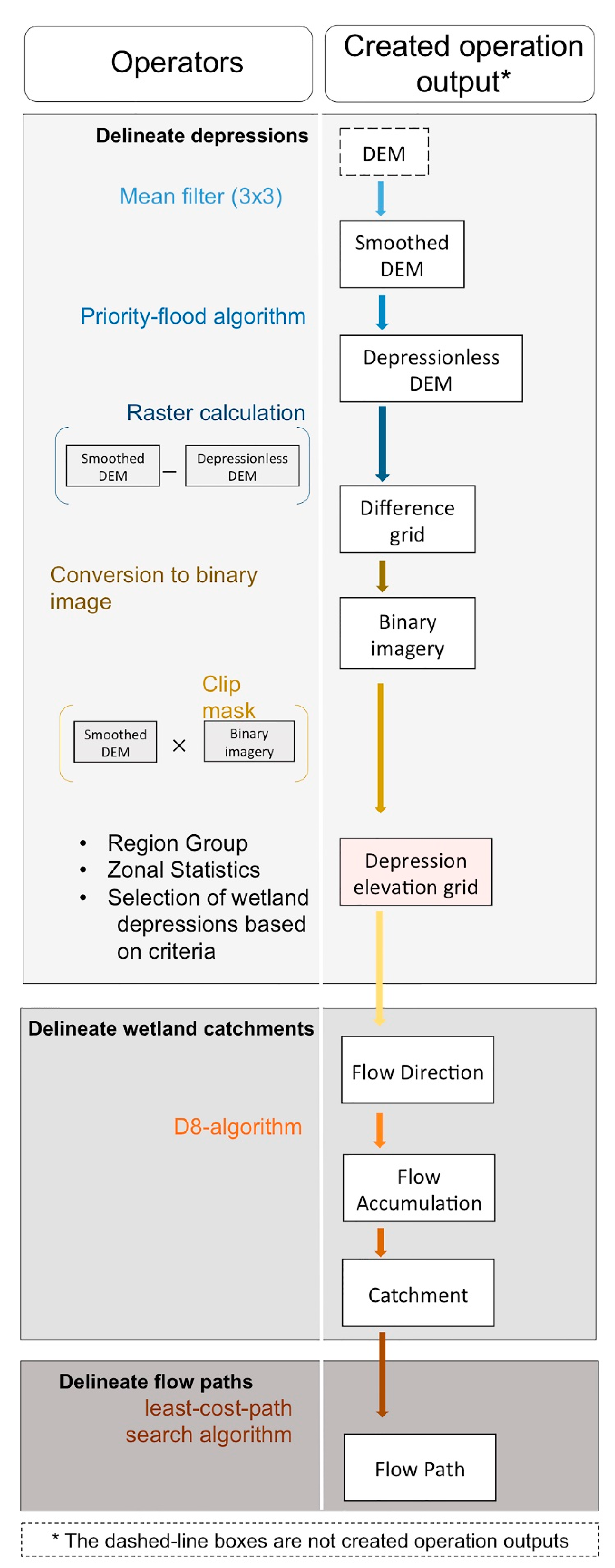
Delineation of Wetlands
Delineation of Wetland Catchments
Delineation of Drainage Flow Paths
2.2.3. Identification of Threshold Values
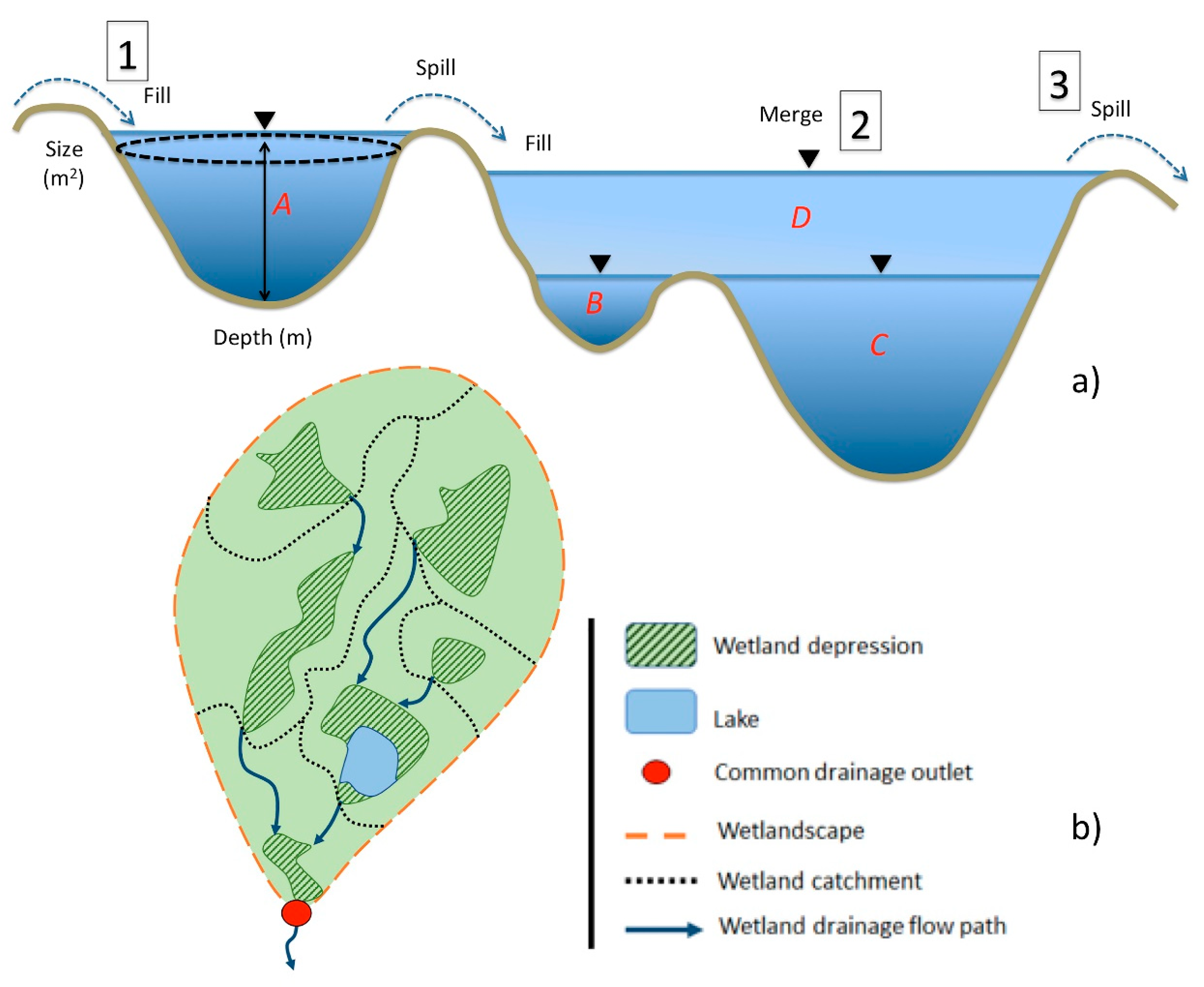
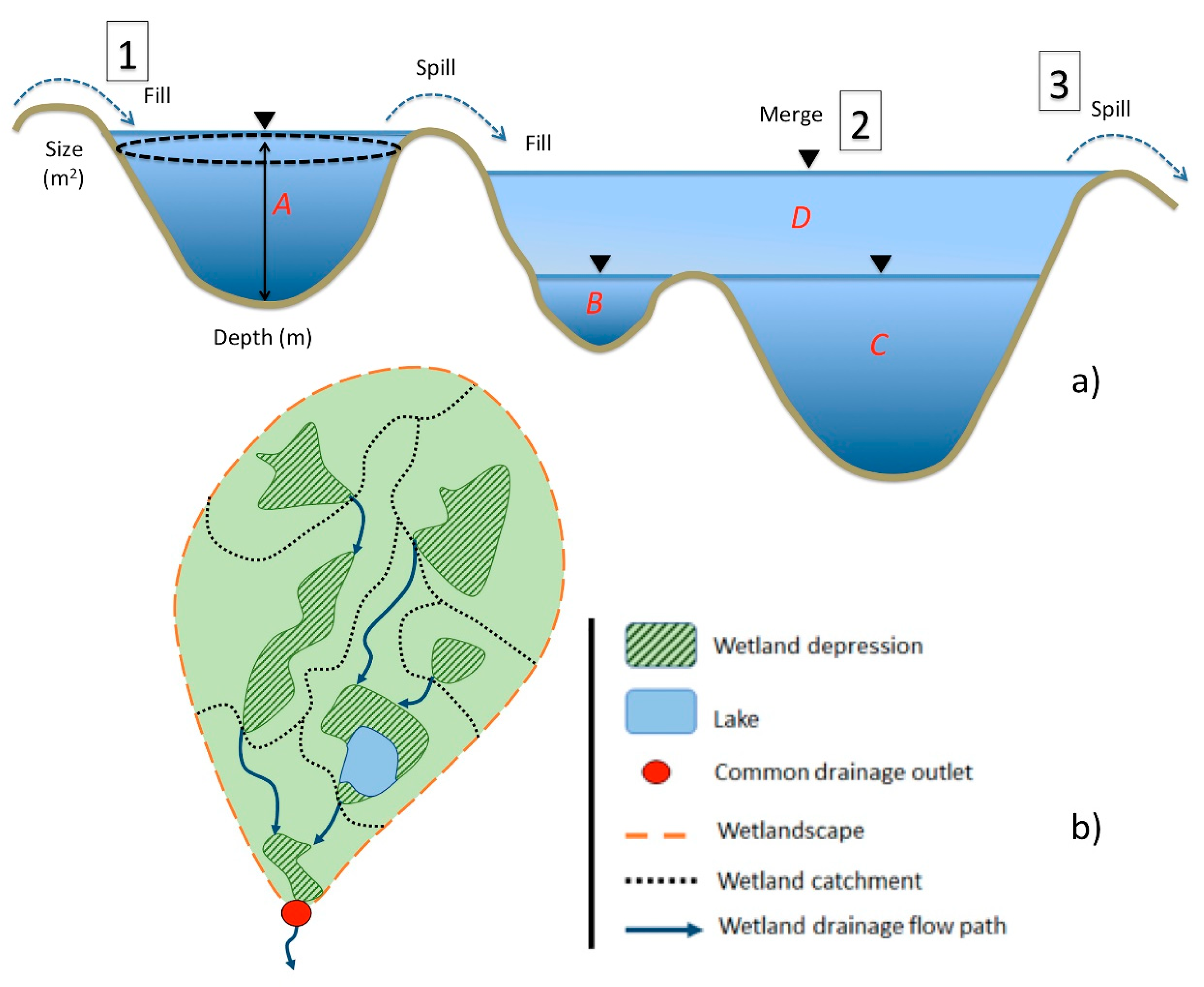
2.2.4. Delineation of Wetlandscape Using Hydrological Connectivity
3. Results
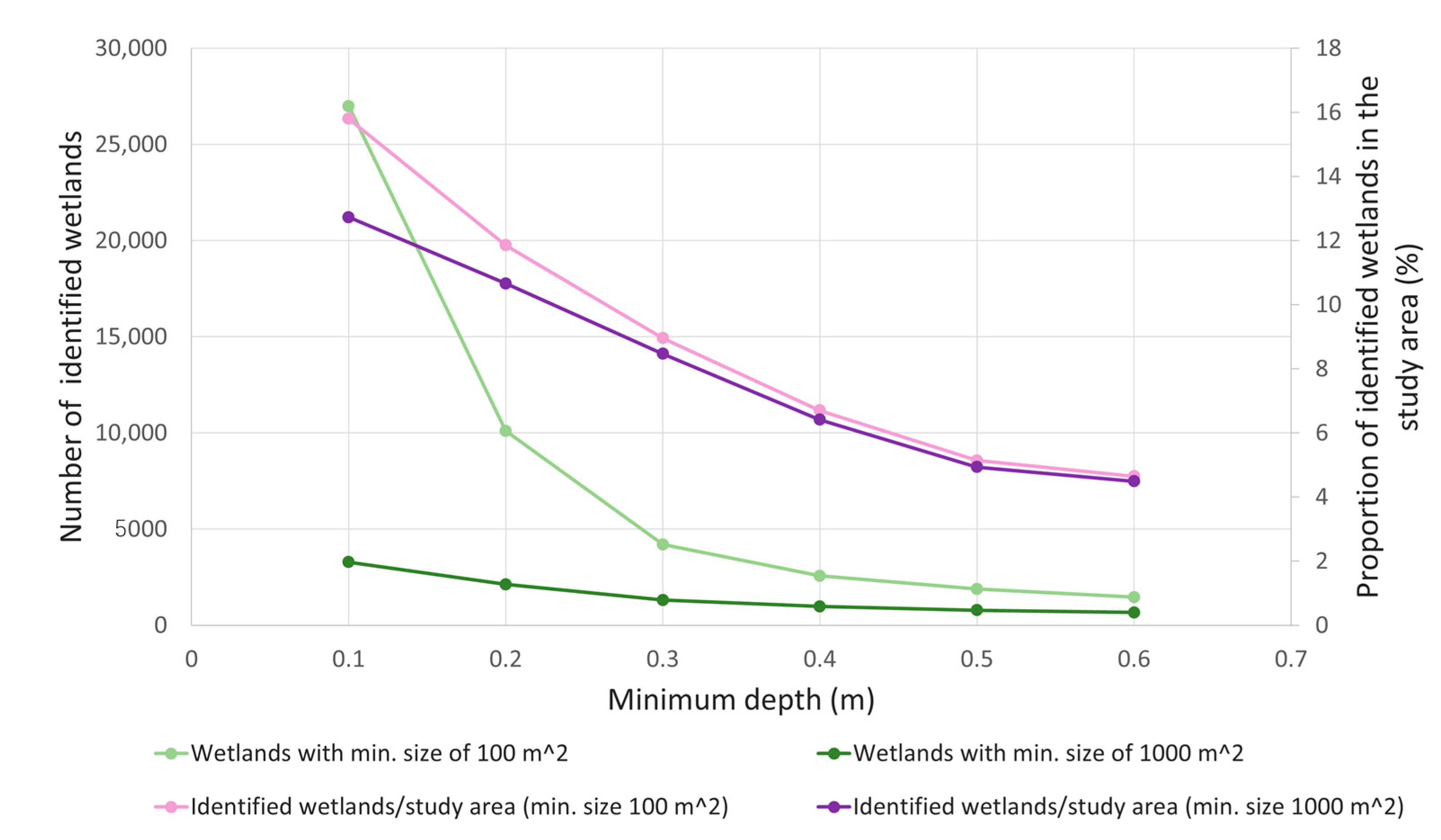
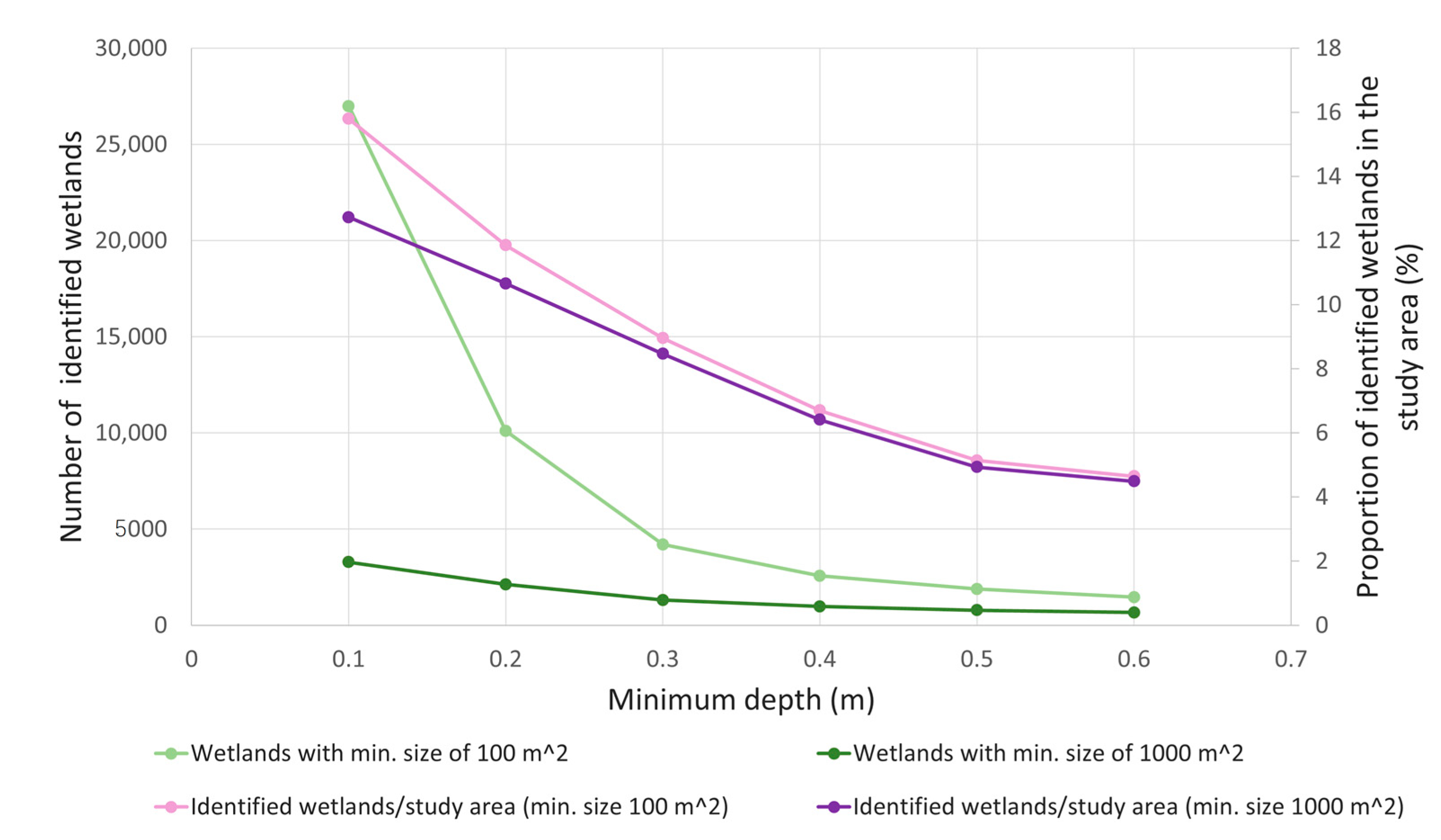
3.1. Identified Potential Wetlands
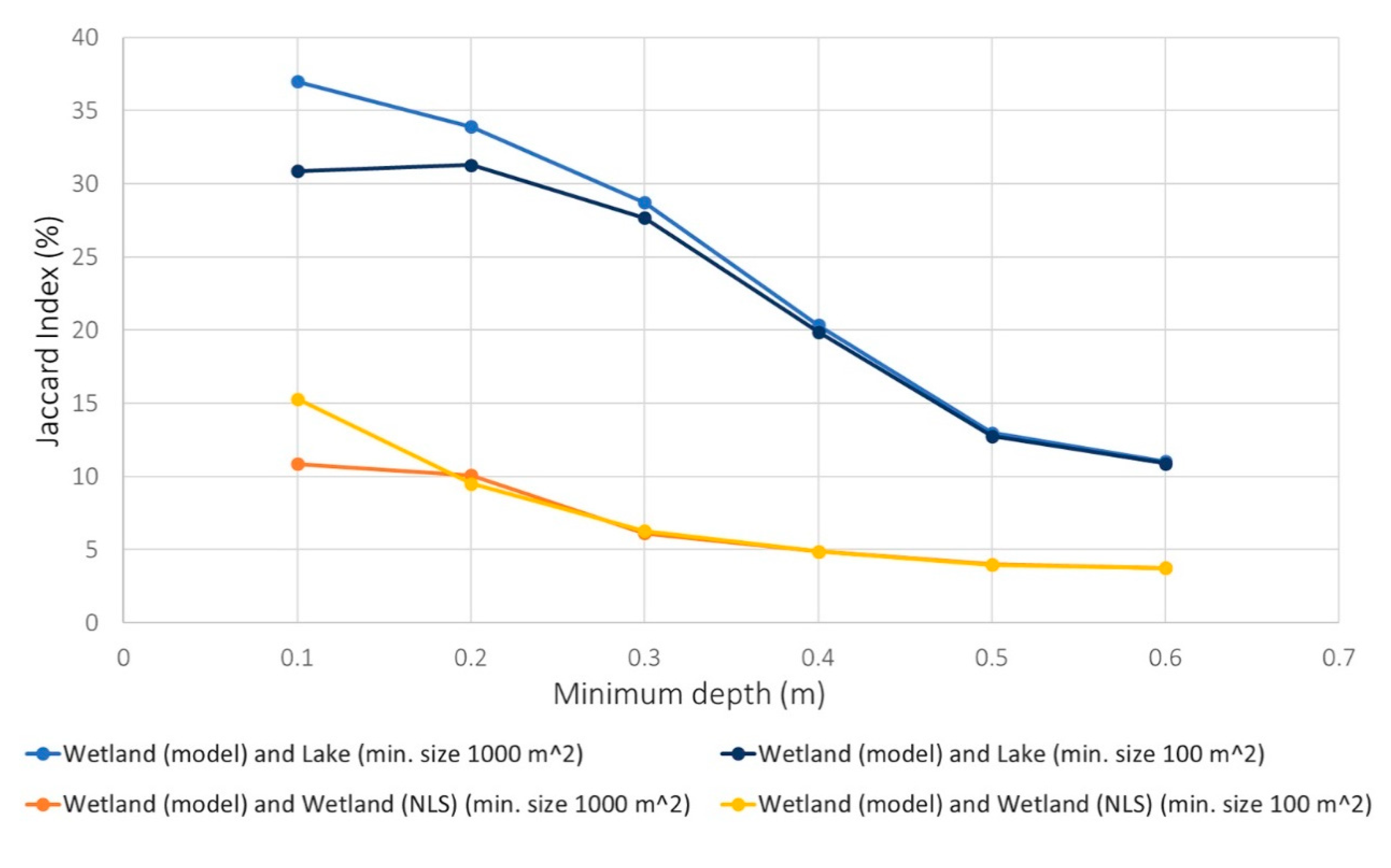
3.2. Similarity Analysis and Selection of Model Parameters
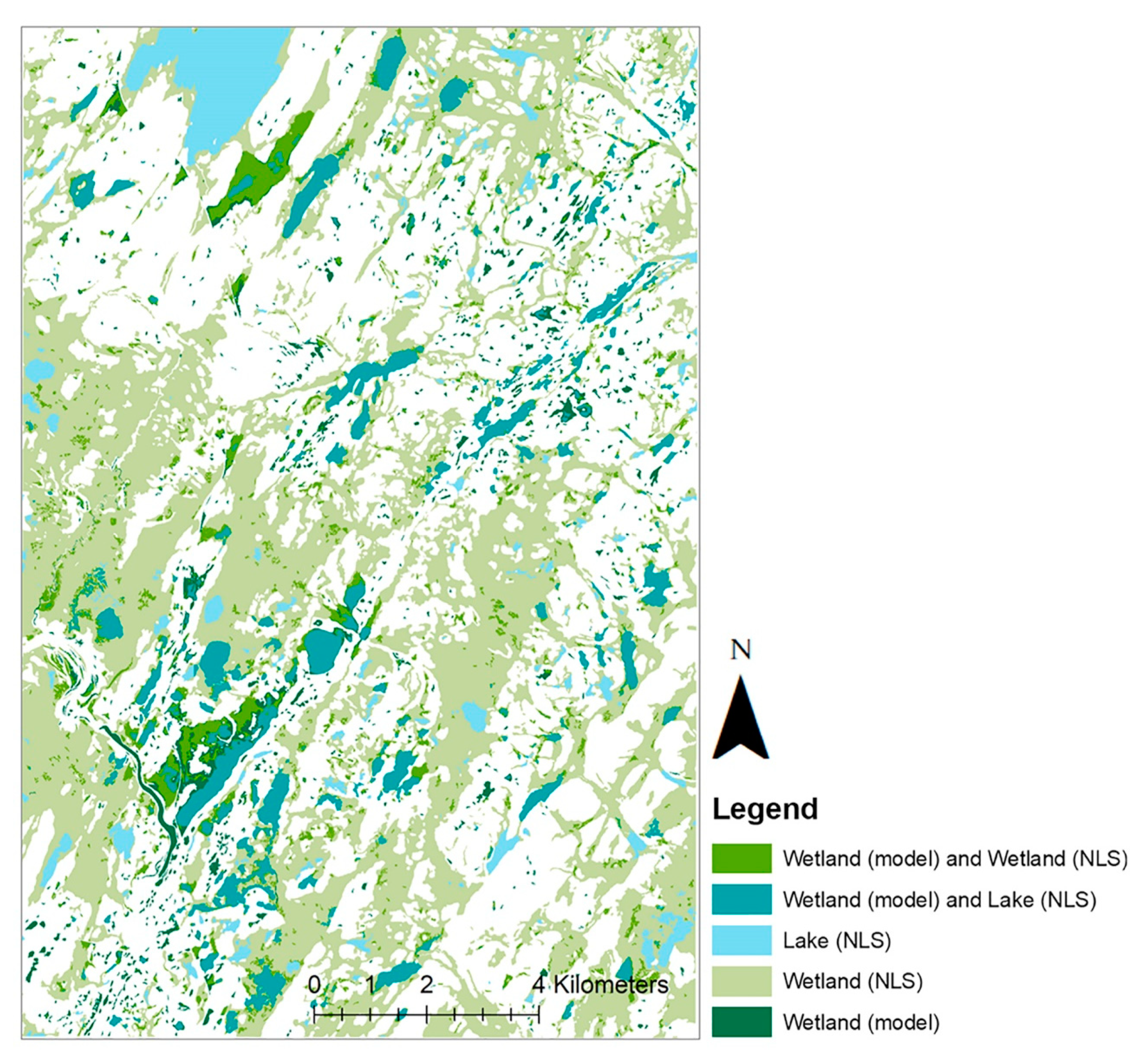
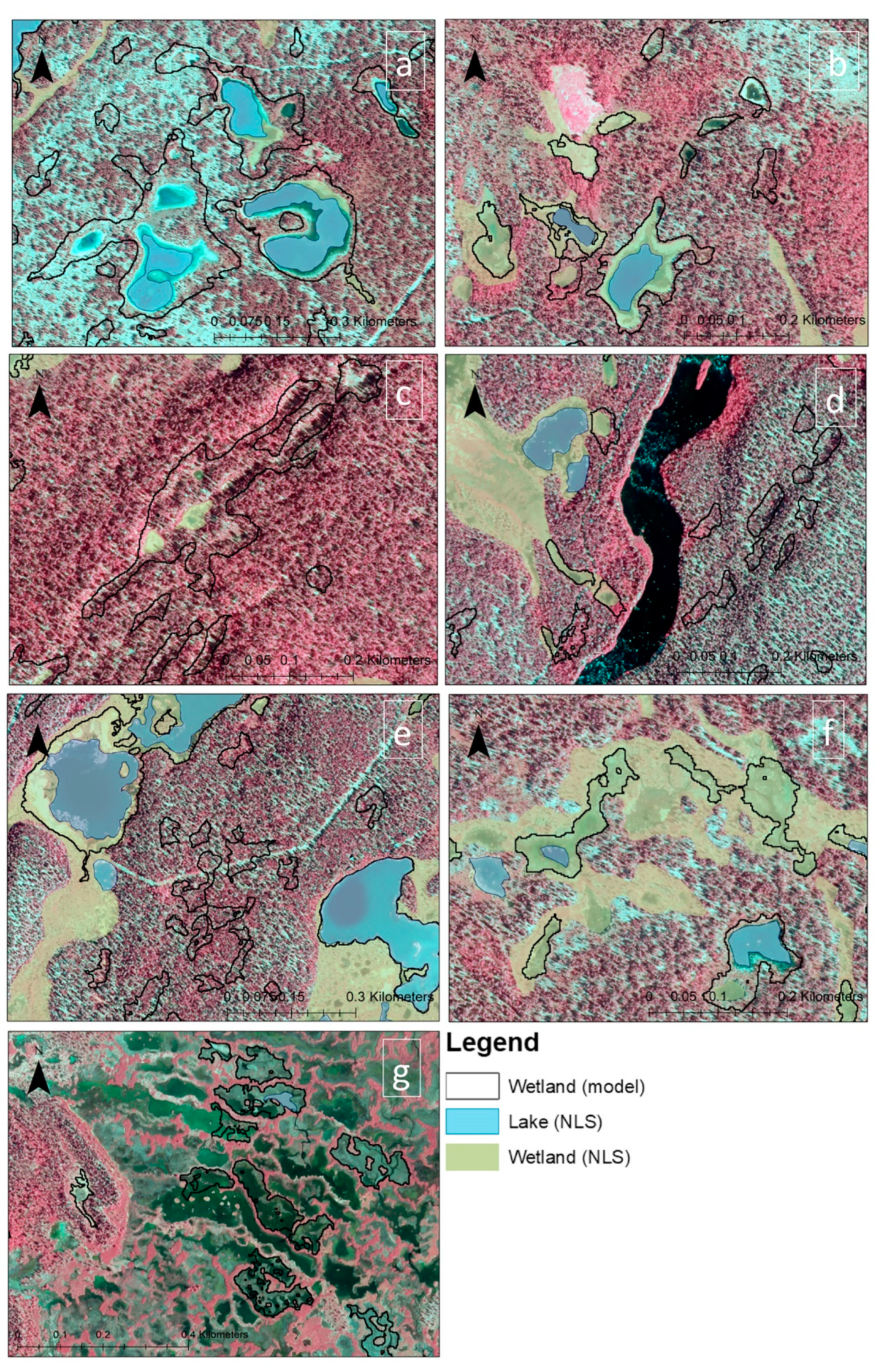
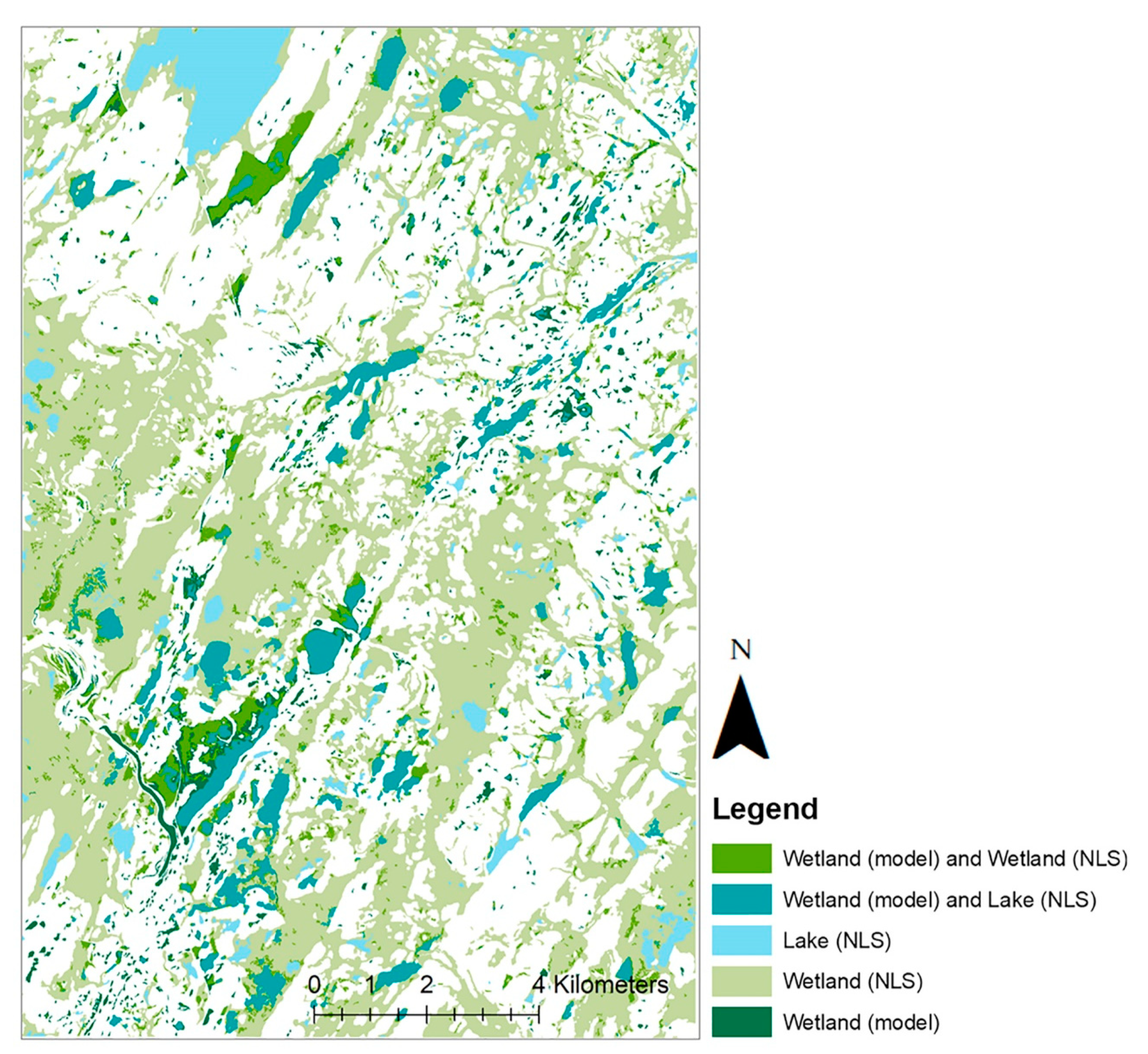
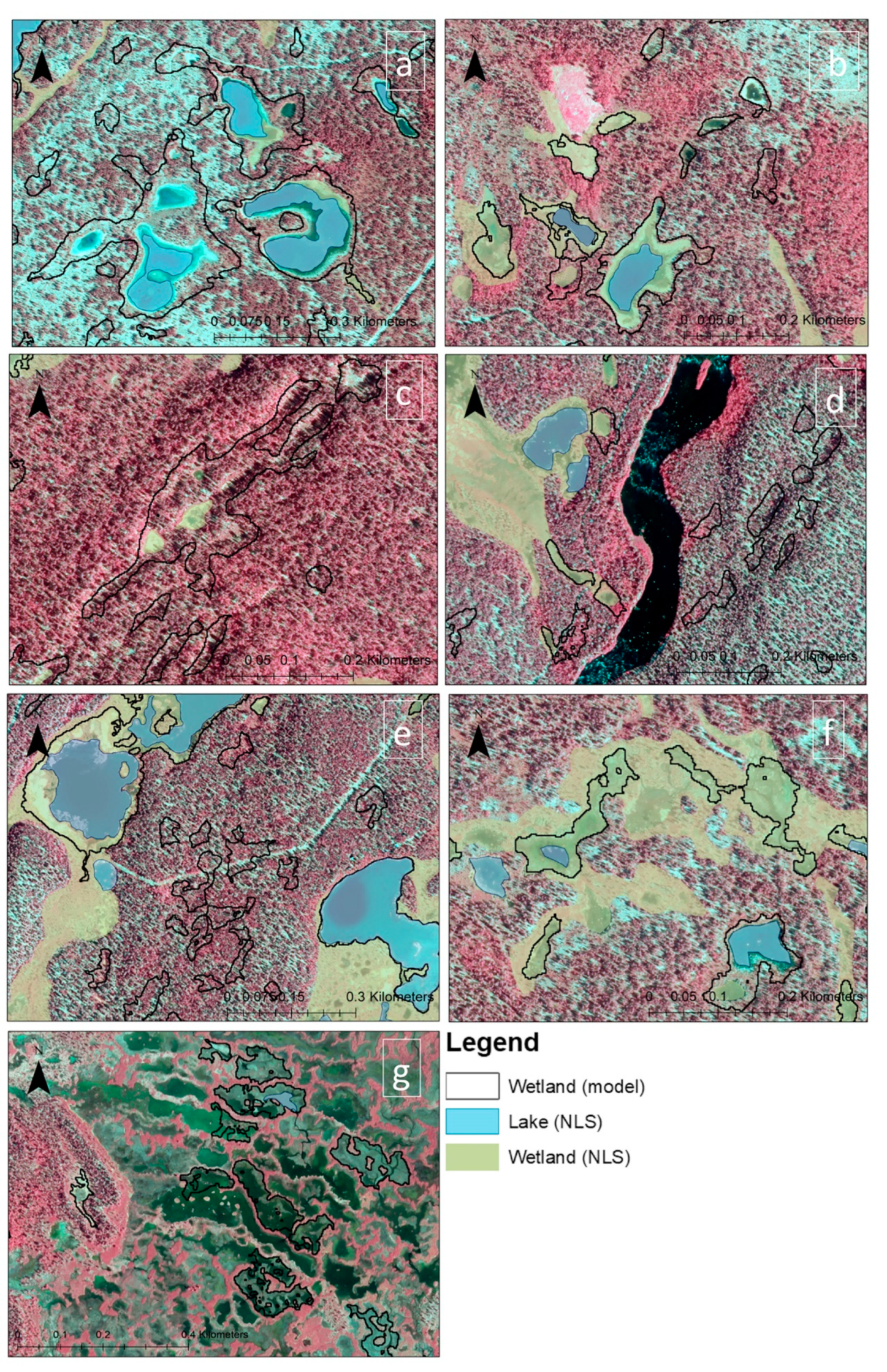
3.3. Mapping of Identified Wetlands
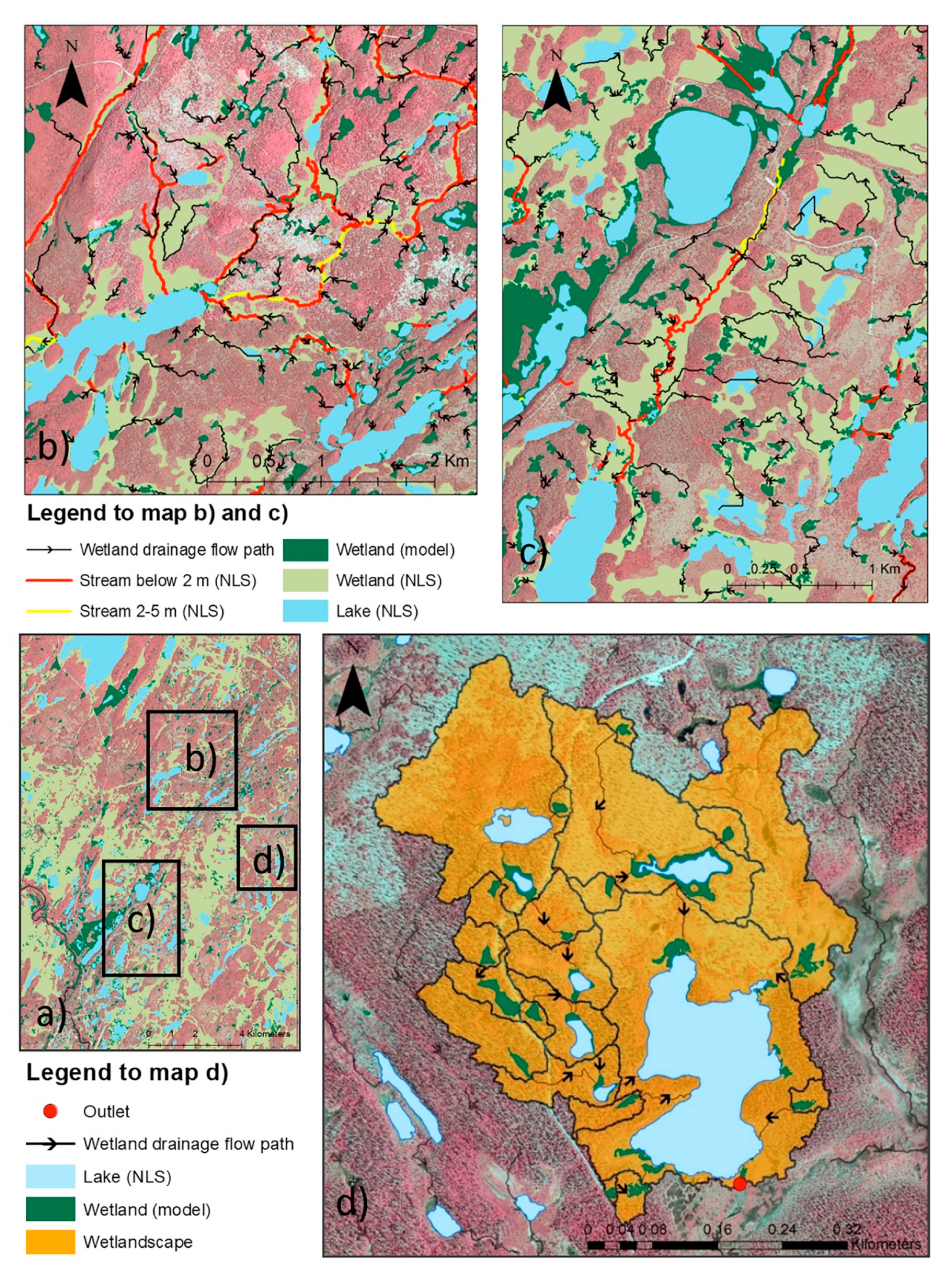
3.4. Wetlandscape Connectivity
4. Discussion
4.1. Model Performance in Identification of Wetlands
4.2. Hydrological Connectivity of Wetlands and Wetland Management
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ramsar Focuses on Arctic Wetlands|Ramsar. Available online: https://www.Ramsar.org/news/ramsar-focuses-on-arctic-wetlands (accessed on 12 July 2020).
- Destouni, G.; Jaramillo, F.; Prieto, C. Hydroclimatic shifts driven by human water use for food and energy production. Nat. Clim. Chang. 2013, 3, 213–217. [Google Scholar] [CrossRef]
- Seneviratne, S.I.; Lüthi, D.; Litschi, M.; Schär, C. Land–atmosphere coupling and climate change in Europe. Nat. Cell Biol. 2006, 443, 205–209. [Google Scholar] [CrossRef] [PubMed]
- Wetlands: Source of Sustainable Livelihoods. Available online: https://www.ramsar.org/sites/default/files/fs_7_livelihoods_en_v5_2.pdf (accessed on 20 July 2020).
- Quin, A.; Destouni, G. Large-scale comparison of flow-variability dampening by lakes and wetlands in the landscape. Land Degrad. Dev. 2018, 29, 3617–3627. [Google Scholar] [CrossRef] [Green Version]
- Golden, H.E.; Creed, I.F.; Ali, G.; Basu, N.B.; Neff, B.P.; Rains, M.C.; McLaughlin, D.L.; Alexander, L.C.; Ameli, A.A.; Christensen, J.R.; et al. Integrating geographically isolated wetlands into land management decisions. Front. Ecol. Environ. 2017, 15, 319–327. [Google Scholar] [CrossRef]
- Creed, I.F. Groundwaters at Risk: Wetland Loss Changes Sources, Lengthens Pathways, and Decelerates Rejuvenation of Groundwater Resources. JAWRA J. Am. Water Resour. Assoc. 2019, 55, 294–306. [Google Scholar] [CrossRef]
- Verhoeven, J.T.A.; Arheimer, B.; Yin, C.; Hefting, M.M. Regional and global concerns over wetlands and water quality. Trends Ecol. Evol. 2006, 21, 96–103. [Google Scholar] [CrossRef]
- Gibbs, J.P. Wetland Loss and Biodiversity Conservation. Conserv. Biol. 2000, 14, 314–317. [Google Scholar] [CrossRef] [Green Version]
- Mitsch, W.J.; Bernal, B.; Nahlik, A.M.; Mander, Ü.; Zhang, L.; Anderson, C.J.; Jorgensen, S.E.; Brix, H. Wetlands, carbon, and climate change. Landsc. Ecol. 2013, 28, 583–597. [Google Scholar] [CrossRef]
- Karlsson, J.M.; Bring, A.; Peterson, G.D.; Gordon, L.J.; Destouni, G. Opportunities and limitations to detect climate-related regime shifts in inland Arctic ecosystems through eco-hydrological monitoring. Environ. Res. Lett. 2011, 6. [Google Scholar] [CrossRef]
- Lindwall, F.; Svendsen, S.S.; Nielsen, C.S.; Michelsen, A.; Rinnan, R. Warming increases isoprene emissions from an arctic fen. Sci. Total. Environ. 2016, 553, 297–304. [Google Scholar] [CrossRef]
- Morison, M.Q.; Macrae, M.L.; Petrone, R.M.; Fishback, L. Seasonal dynamics in shallow freshwater pond-peatland hydrochemical interactions in a subarctic permafrost environment. Hydrol. Process. 2017, 31, 462–475. [Google Scholar] [CrossRef]
- Pavón-Jordán, D.; Santangeli, A.; Lehikoinen, A. Effects of flyway-wide weather conditions and breeding habitat on the breeding abundance of migratory boreal waterbirds. J. Avian Biol. 2017, 48, 988–996. Available online: https://researchportal.helsinki.fi/en/publications/effects-of-flyway-wide-weather-conditions-and-breeding-habitat-on (accessed on 20 July 2020). [CrossRef] [Green Version]
- Van Der Kolk, H.-J.; Heijmans, M.M.P.D.; Van Huissteden, K.; Pullens, J.W.M.; Berendse, F. Potential Arctic tundra vegetation shifts in response to changing temperature, precipitation and permafrost thaw. Biogeosciences 2016, 13, 6229–6245. [Google Scholar] [CrossRef] [Green Version]
- Keesstra, S.; Nunes, J.P.; Novara, A.; Finger, D.; Avelar, D.; Kalantari, Z.; Cerdà, A. The superior effect of nature based solutions in land management for enhancing ecosystem services. Sci. Total. Environ. 2018, 997–1009. [Google Scholar] [CrossRef] [Green Version]
- Cohen-Shacham, E.; Walters, G.; Janzen, C.; Maginnis, S. Nature-Based Solutions to Address Global Societal Challenges; IUCN: Gland, Switzerland, 2016; 97p. [Google Scholar]
- Stocker, T.F.; Qin, D.; Plattner, G.-K.; Tignor, M.; Allen, S.K.; Boschung, J.; Nauels, A.; Xia, Y.; Bex, V.; Midgley, P.M. Climate Change 2013: The physical Science Basis; Working Group I Contribution to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2013; Available online: https://boris.unibe.ch/71452/ (accessed on 20 July 2020). [CrossRef] [Green Version]
- Erwin, K.L. Wetlands and global climate change: The role of wetland restoration in a changing world. Wetl. Ecol. Manag. 2009, 17, 71–84. [Google Scholar] [CrossRef]
- Box, J.; Colgan, W.T.; Christensen, T.R.; Schmidt, N.M.; Lund, M.; Parmentier, F.-J.W.; Brown, R.; Bhatt, U.S.; Euskirchen, E.S.; Romanovsky, V.E.; et al. Key indicators of Arctic climate change: 1971–2017. Environ. Res. Lett. 2019, 14, 045010. [Google Scholar] [CrossRef]
- Serreze, M.C.; Walsh, J.E.; Iii, F.S.C.; Osterkamp, T.; Dyurgerov, M.; Romanovsky, V.; Oechel, W.C.; Morison, J.; Zhang, T.; Barry, R.G. Observational Evidence of Recent Change in the Northern High-Latitude Environment. Clim. Chang. 2000, 46, 159–207. [Google Scholar] [CrossRef]
- Land, M.; Carson, M. Sustainable Management and Resilience of Arctic Wetlands—Scoping Study. Available online: https://www.sei.org/publications/sustainable-management-resilience-arctic-wetlands/ (accessed on 12 July 2020).
- Juvonen, S.-K.; Kurikka, T. Finland’s Ramsar Wetlands Action Plan 2016–2020|InforMEA. Available online: https://www.informea.org/en/finland%E2%80%99s-ramsar-wetlands-action-plan-2016%E2%80%932020 (accessed on 26 July 2020).
- Hu, S.; Niu, Z.; Chen, Y.; Li, L.; Zhang, H. Global wetlands: Potential distribution, wetland loss, and status. Sci. Total. Environ. 2017, 586, 319–327. [Google Scholar] [CrossRef]
- Gunnarsson, U.; Löfroth, M. Våtmarksinventeringen: Resultat Från 25 Års Inventeringar: Nationell Slutrapport för Våtmarksinventeringen (VMI) i Sverige. Naturvårdsverket. 2009. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:uu:diva-120460 (accessed on 10 August 2020).
- Leibowitz, S.G.; Mushet, D.M.; Newton, W.E. Intermittent Surface Water Connectivity: Fill and Spill Vs. Fill and Merge Dynamics. Wetlands 2016, 36, 323–342. [Google Scholar] [CrossRef]
- Freeman, M.C.; Pringle, C.M.; Jackson, C.R. Hydrologic Connectivity and the Contribution of Stream Headwaters to Ecological Integrity at Regional Scales. JAWRA J. Am. Water Resour. Assoc. 2007, 43, 5–14. [Google Scholar] [CrossRef]
- Li, T.; Raivonen, M.; Alekseychik, P.; Aurela, M.; Lohila, A.; Zheng, X.; Zhang, Q.; Wang, G.; Mammarella, I.; Rinne, J.; et al. Importance of vegetation classes in modeling CH4 emissions from boreal and subarctic wetlands in Finland. Sci. Total. Environ. 2016, 572, 1111–1122. [Google Scholar] [CrossRef] [PubMed]
- Craft, C. Creating and Restoring Wetlands: From Theory to Practice; Elsevier: Amsterdam, The Netherlands, 2015; 360p. [Google Scholar]
- Swindles, G.T.; Morris, P.J.; Mullan, D.J.; Payne, R.J.; Roland, T.P.; Amesbury, M.J.; Lamentowicz, M.; Turner, T.E.; Gallego-Sala, A.; Sim, T.; et al. Widespread drying of European peatlands in recent centuries. Nat. Geosci. 2019, 12, 922–928. [Google Scholar] [CrossRef]
- Hugelius, G.; Loisel, J.; Chadburn, S.; Jackson, R.B.; Jones, M.; Macdonald, G.; Marushchak, M.; Olefeldt, D.; Packalen, M.; Siewert, M.B.; et al. Large stocks of peatland carbon and nitrogen are vulnerable to permafrost thaw. Proc. Natl. Acad. Sci. USA 2020, 117, 20438–20446. [Google Scholar] [CrossRef] [PubMed]
- Golden, H.E.; Lane, C.R.; Amatya, D.M.; Bandilla, K.W.; Kiperwas, H.R.; Knightes, C.D.; Ssegane, H. Hydrologic connectivity between geographically isolated wetlands and surface water systems: A review of select modeling methods. Environ. Model. Softw. 2014, 53, 190–206. [Google Scholar] [CrossRef]
- Ghajarnia, N.; Destouni, G.; Thorslund, J.; Kalantari, Z.; Åhlén, I.; Anaya-Acevedo, J.A.; Blanco-Libreros, J.F.; Borja, S.; Chalov, S.; Chalova, A.; et al. Data for wetlandscapes and their changes around the world. Earth Syst. Sci. Data 2020, 12, 1083–1100. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.; Endres, S.; Powell, R.; Battaglia, M.; Benscoter, B.; Turetsky, M.; Kasischke, E.; Banda, E. Mapping boreal peatland ecosystem types from multitemporal radar and optical satellite imagery. Can. J. For. Res. 2017, 47, 545–559. [Google Scholar] [CrossRef]
- Karlson, M.; Gålfalk, M.; Crill, P.; Bousquet, P.; Saunois, M.; Bastviken, D. Delineating northern peatlands using Sentinel-1 time series and terrain indices from local and regional digital elevation models. Remote. Sens. Environ. 2019, 231, 111252. [Google Scholar] [CrossRef]
- Murphy, P.N.C.; Ogilvie, J.; Connor, K.; Arp, P.A. Mapping wetlands: A comparison of two different approaches for New Brunswick, Canada. Wetlands 2007, 27, 846–854. [Google Scholar] [CrossRef]
- Lidberg, W.; Nilsson, M.; Ågren, A.M. Using machine learning to generate high-resolution wet area maps for planning forest management: A study in a boreal forest landscape. Ambio 2020, 49, 475–486. [Google Scholar] [CrossRef] [Green Version]
- Thorslund, J.; Jarsjo, J.; Jaramillo, F.; Jawitz, J.W.; Manzoni, S.; Basu, N.B.; Chalov, S.R.; Cohen, M.J.; Creed, I.F.; Goldenberg, R.; et al. Wetlands as large-scale nature-based solutions: Status and challenges for research, engineering and management. Ecol. Eng. 2017, 108, 489–497. [Google Scholar] [CrossRef]
- Dai, L.; Zhang, Y.; Liu, Y.; Xie, L.; Zhao, S.; Zhang, Z.; Lv, X. Assessing hydrological connectivity of wetlands by dye-tracing experiment. Ecol. Indic. 2020, 119, 106840. [Google Scholar] [CrossRef]
- Mooney, S.J.; Morris, C. A morphological approach to understanding preferential flow using image analysis with dye tracers and X-ray Computed Tomography. Catena 2008, 73, 204–211. [Google Scholar] [CrossRef]
- Jones, E.H.; Smith, C.C. Non-equilibrium partitioning tracer transport in porous media: 2-D physical modelling and imaging using a partitioning fluorescent dye. Water Res. 2005, 39, 5099–5111. [Google Scholar] [CrossRef] [PubMed]
- Ferlatte, M.; Quillet, A.; Larocque, M.; Cloutier, V.; Pellerin, S.; Paniconi, C. Aquifer-peatland connectivity in southern Quebec (Canada). Hydrol. Process. 2015, 29, 2600–2612. [Google Scholar] [CrossRef] [Green Version]
- Allen, C.; Gonzales, R.; Parrott, L. Modelling the contribution of ephemeral wetlands to landscape connectivity. Ecol. Model. 2020, 419, 108944. [Google Scholar] [CrossRef]
- Winter, T.C.; Woo, M.-K. Hydrology of lakes and wetlands. In Surface Water Hydrology; Geological Society of America: Boulder, CO, USA, 1990; pp. 159–187. Available online: https://pubs.geoscienceworld.org/books/book/861/chapter/3920383/ (accessed on 22 July 2020).
- Woo, M.-K.; Young, K.L. High Arctic wetlands: Their occurrence, hydrological characteristics and sustainability. J. Hydrol. 2006, 320, 432–450. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, H.; Wang, S.; Yu, B.; Beck, R.; Hinkel, K. A localized contour tree method for deriving geometric and topological properties of complex surface depressions based on high-resolution topographical data. Int. J. Geogr. Inf. Sci. 2015, 29, 2041–2060. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; Mcmahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. Discuss. 2007, 4, 439–473. [Google Scholar] [CrossRef] [Green Version]
- FMI (Finnish Meteorological Institute). GHG Measurement Sites—Finnish Meteorological Institute. Kaamanen. Available online: https://en.ilmatieteenlaitos.fi/ghg-measurement-sites (accessed on 22 July 2020).
- Finnish Environment Institute (SYKE). Downloadable Spatial Datasets—Syke.fi. Available online: https://www.syke.fi/en-US/Open_information/Spatial_datasets/Downloadable_spatial_dataset#C (accessed on 7 September 2020).
- Fisher, P.F.; Tate, N.J. Causes and consequences of error in digital elevation models. Prog. Phys. Geogr. Earth Environ. 2006, 30, 467–489. [Google Scholar] [CrossRef]
- Wu, Q.; Lane, C.R. Delineating wetland catchments and modeling hydrologic connectivity using lidar data and aerial imagery. Hydrol. Earth Syst. Sci. 2017, 21, 3579–3595. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Liu, H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Region Group—Help|ArcGIS for Desktop. Available online: https://desktop.arcgis.com/en/arcmap/10.3/tools/spatial-analyst-toolbox/region-group.htm (accessed on 22 July 2020).
- Zonal Statistics—Help|ArcGIS for Desktop. Available online: https://desktop.arcgis.com/en/arcmap/10.3/tools/spatial-analyst-toolbox/zonal-statistics.htm (accessed on 22 July 2020).
- Flow Direction—Help|ArcGIS for Desktop. Available online: https://desktop.arcgis.com/en/arcmap/10.3/tools/spatial-analyst-toolbox/flow-direction.htm (accessed on 22 July 2020).
- O’Callaghan, J.F.; Mark, D.M. The extraction of drainage networks from digital elevation data. Comput. Vis Graph Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Flow Accumulation—Help|ArcGIS for Desktop. Available online: https://desktop.arcgis.com/en/arcmap/10.3/tools/spatial-analyst-toolbox/flow-accumulation.htm (accessed on 22 July 2020).
- Cost Path—Help|Documentation. Available online: https://pro.arcgis.com/en/pro-app/tool-reference/spatial-analyst/cost-path.htm (accessed on 22 July 2020).
- Geodata Portal Paikkatietoikkuna|National Land Survey of Finland. Available online: https://www.maanmittauslaitos.fi/en/e-services/geodata-portal-paikkatietoikkuna (accessed on 26 July 2020).
- Jaccard, P. The Distribution of the Flora in the Alpine Zone. New Phytol. 1912, 11, 37–50. [Google Scholar] [CrossRef]
- Chu, X.; Yang, J.; Chi, Y.; Zhang, J. Dynamic puddle delineation and modeling of puddle-to-puddle filling-spilling-merging-splitting overland flow processes. Water Resour. Res. 2013, 49, 3825–3829. [Google Scholar] [CrossRef]
- Aurela, M.; Laurila, T.; Tuovinen, J.-P. The timing of snow melt controls the annual CO2 balance in a subarctic fen. Geophys. Res. Lett. 2004, 31. Available online: https://agupubs.onlinelibrary.wiley.com/doi/abs/ (accessed on 22 July 2020). [CrossRef]
- Aapamyrar. Environmental Protection Agency Sweden. 2011. Available online: http://www.naturvardsverket.se/upload/stod-i-miljoarbetet/vagledning/natura-2000/naturtyper/myrar/vl-7310-aapamyr.pdf (accessed on 22 July 2020).
- Laitinen, J.; Rehell, S.; Huttunen, A.; Tahvanainen, T.; Heikkilä, R.; Lindholm, T. Mire systems in Finland—special view to aapa mires and their water-flow pattern. Suo 2007, 58, 1–26. [Google Scholar]
- Amani, M.; Salehi, B.; Mahdavi, S.; Granger, J.; Brisco, B. Wetland classification in Newfoundland and Labrador using multi-source SAR and optical data integration. GIScience Remote. Sens. 2017, 54, 779–796. [Google Scholar] [CrossRef]
- Merchant, M.A.; Warren, R.K.; Edwards, R.; Kenyon, J.K. An Object-Based Assessment of Multi-Wavelength SAR, Optical Imagery and Topographical Datasets for Operational Wetland Mapping in Boreal Yukon, Canada. Can. J. Remote. Sens. 2019, 45, 308–332. [Google Scholar] [CrossRef]
- Porter, C.; Morin, P.; Howat, I.; Noh, M.J.; Bates, B.; Peterman, K.; Keesey, S.; Schlenk, M.; Gardiner, J.; Tomko, K. ArcticDEM. Harvard Dataverse. 2018. Available online: https://dataverse.harvard.edu/dataset.xhtml?persistentId=doi:10.7910/DVN/OHHUKH (accessed on 16 September 2020).
- Arino, O.; Ramos Perez, J.J.; Kalogirou, V.; Bontemps, S.; Defourny, P.; Van Bogaert, E. Global Land Cover Map for 2009 (GlobCover 2009). ©European Space Agency (ESA) & Université Catholique de Louvain (UCL). PANGAEA, 2012. Available online: https://doi.pangaea.de/10.1594/PANGAEA.787668 (accessed on 30 October 2020).
- Chen, J.; Chen, J.; Liao, A.; Cao, X.; Chen, L.; Chen, X.; He, C.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote. Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef] [Green Version]
- Tateishi, R.; Uriyangqai, B.; Al-Bilbisi, H.; Ghar, M.A.; Tsend-Ayush, J.; Kobayashi, T.; Kasimu, A.; Hoan, N.T.; Shalaby, A.; Alsaaideh, B.; et al. Production of Global Land Cover Data—GLCNMOJ. Geogr Geol. 2017, 9, 1. [Google Scholar]
- Lehner, B.; Döll, P. Development and validation of a global database of lakes, reservoirs and wetlands. J. Hydrol. 2004, 296, 1–22. [Google Scholar] [CrossRef]
- Schroeder, R.; McDonald, K.C.; Chapman, B.; Jensen, K.; Podest, E.; Tessler, Z.D.; Bohn, T.J.; Zimmermann, R. Development and Evaluation of a Multi-Year Fractional Surface Water Data Set Derived from Active/Passive Microwave Remote Sensing Data. Remote. Sens. 2015, 7, 16688–16732. [Google Scholar] [CrossRef] [Green Version]
- Tiner, R. Ecology of Wetlands: Classification Systems. In Encyclopedia of Inland Waters; Elsevier BV: Amsterdam, The Netherlands, 2009; pp. 516–525. Available online: https://linkinghub.elsevier.com/retrieve/pii/B9780123706263000570 (accessed on 19 September 2020).
- Zamberletti, P.; Zaffaroni, M.; Accatino, F.; Creed, I.F.; De Michele, C. Connectivity among wetlands matters for vulnerable amphibian populations in wetlandscapes. Ecol. Model. 2018, 384, 119–127. [Google Scholar] [CrossRef]
- Braat, L.; De Groot, R.; Sutton, P.C.; Van Der Ploeg, S.; Anderson, S.J.; Kubiszewski, I.; Farber, S.; Turner, R.K. Changes in the global value of ecosystem services. Glob. Environ. Chang. 2014, 26, 152–158. [Google Scholar] [CrossRef]
- Seifollahi-Aghmiuni, S.; Nockrach, M.; Kalantari, Z. The Potential of Wetlands in Achieving the Sustainable Development Goals of the 2030 Agenda. Water 2019, 11, 609. [Google Scholar] [CrossRef] [Green Version]
- Cohen, M.J.; Creed, I.F.; Alexander, L.; Basu, N.B.; Calhoun, A.J.K.; Craft, C.; D’Amico, E.; DeKeyser, E.; Fowler, L.; Golden, H.E.; et al. Do geographically isolated wetlands influence landscape functions? Proc. Natl. Acad. Sci. USA 2016, 113, 1978–1986. [Google Scholar] [CrossRef] [Green Version]
- Thorsteinsson, T.; Pundsack, J. Arctic-HYDRA Consortium (2010). Arctic-HYDRA: The Arctic Hydrological Cycle Monitoring, Modelling and Assessment Programme. Arctic Hydra. 2010. Available online: http://arctichydra.arcticportal.org/ (accessed on 21 August 2020).
- Tank, S.E.; Fellman, J.B.; Hood, E.; Kritzberg, E.S. Beyond respiration: Controls on lateral carbon fluxes across the terrestrial-aquatic interface. Limnol. Oceanogr. Lett. 2018, 3, 76–88. [Google Scholar] [CrossRef]
- Ameli, A.A.; Creed, I.F. Quantifying hydrologic connectivity of wetlands to surface water systems. Hydrol. Earth Syst. Sci. 2017, 21, 1791–1808. [Google Scholar] [CrossRef] [Green Version]
- Groß, E.; Mård, J.; Kalantari, Z.; Bring, A. Links between Nordic and Arctic hydroclimate and vegetation changes: Contribution to possible landscape-scale nature-based solutions. Land Degrad. Dev. 2018, 29, 3663–3673. [Google Scholar] [CrossRef] [Green Version]
- Borja, S.; Kalantari, Z.; Destouni, G. Global Wetting by Seasonal Surface Water over the Last Decades. Earth’s Futur. 2020, 8. [Google Scholar] [CrossRef] [Green Version]
- Ghajarnia, N.; Kalantari, Z.; Orth, R.; Destouni, G. Close co-variation between soil moisture and runoff emerging from multi-catchment data across Europe. Sci. Rep. 2020, 10, 4817. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Land Cover | km2 | % |
|---|---|---|
| Wetland (model) | 23 | 11 |
| Wetland (NLS Finland) | 77 | 36 |
| Lake (NLS Finland) | 18 | 8 |
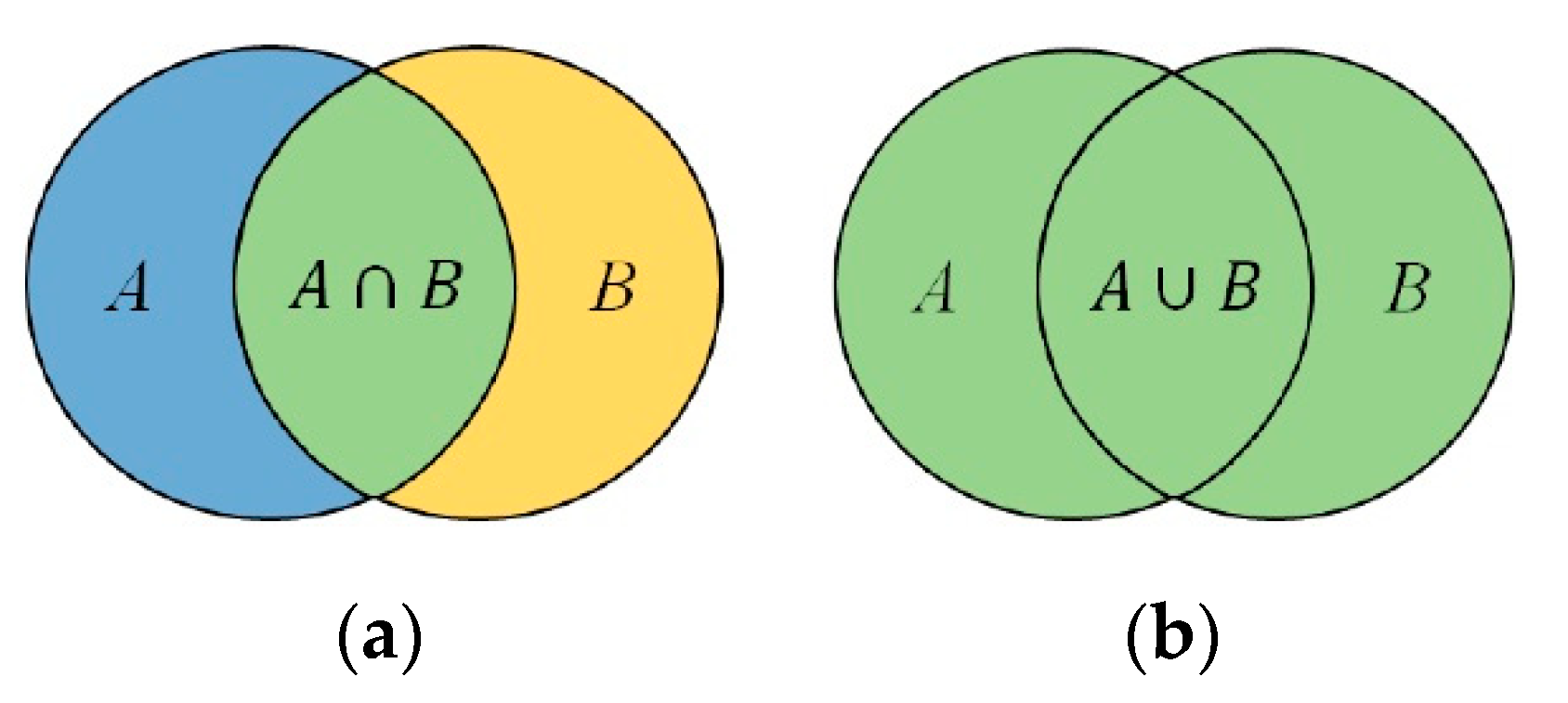
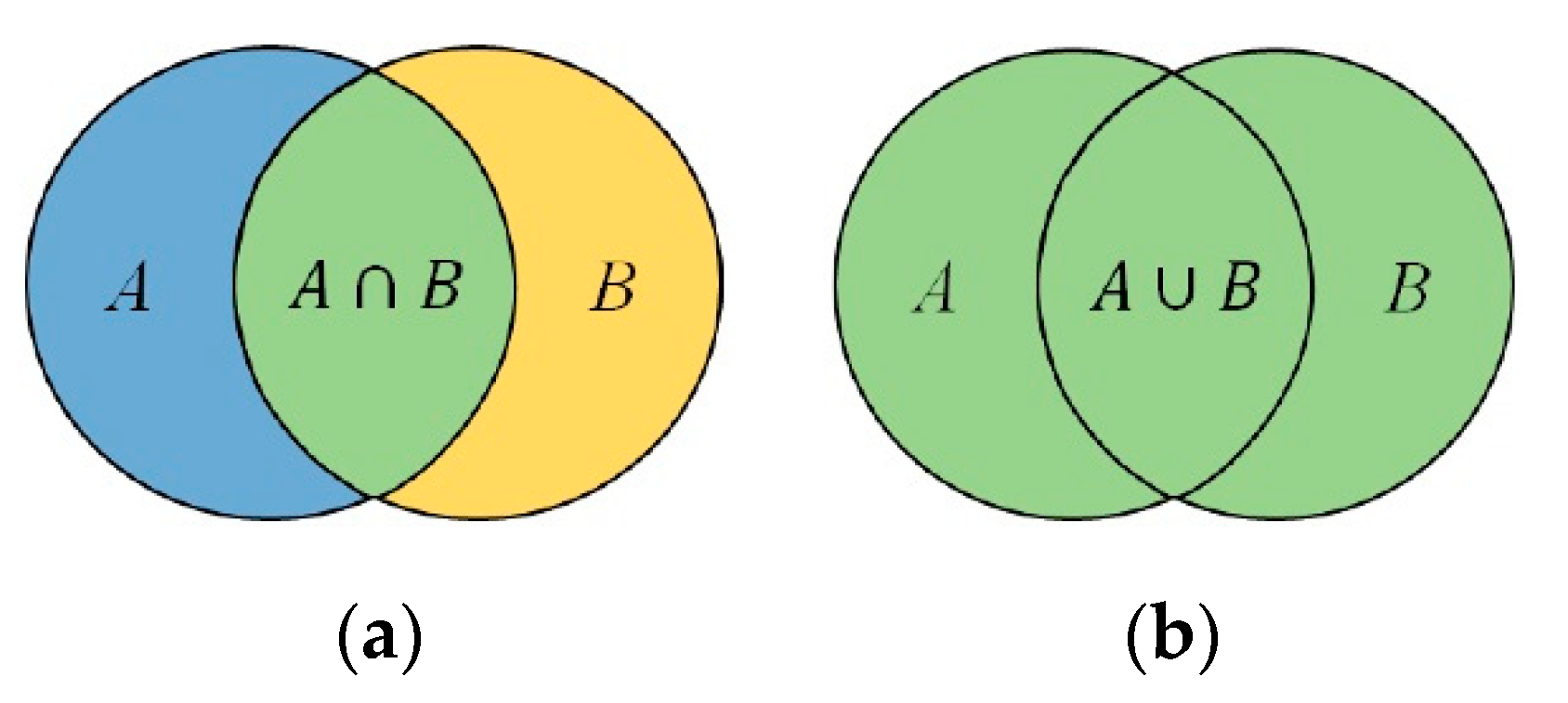
| Wetland (model) ∩ Wetland (NLS Finland) | 8 | 4 |
| Wetland (model) ∩ Lake (NLS Finland) | 10 | 5 |
| NLS | |||||
|---|---|---|---|---|---|
| Total Land Cover (km2) | No Wetland | Wetland | Total | User’s Accuracy | |
| Model | No Wetland | 132.8 | 68.9 | 201.7 | 65.9% |
| Wetland | 4.4 | 7.7 | 12.1 | 63.5% | |
| Total | 137.9 | 76.6 | 213.8 | - | |
| Producer’s Accuracy | 96.8% | 10.1% | - | 65.7% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stengård, E.; Räsänen, A.; Ferreira, C.S.S.; Kalantari, Z. Inventory and Connectivity Assessment of Wetlands in Northern Landscapes with a Depression-Based DEM Method. Water 2020, 12, 3355. https://doi.org/10.3390/w12123355
Stengård E, Räsänen A, Ferreira CSS, Kalantari Z. Inventory and Connectivity Assessment of Wetlands in Northern Landscapes with a Depression-Based DEM Method. Water. 2020; 12(12):3355. https://doi.org/10.3390/w12123355
Chicago/Turabian StyleStengård, Emelie, Aleksi Räsänen, Carla Sofia Santos Ferreira, and Zahra Kalantari. 2020. "Inventory and Connectivity Assessment of Wetlands in Northern Landscapes with a Depression-Based DEM Method" Water 12, no. 12: 3355. https://doi.org/10.3390/w12123355
APA StyleStengård, E., Räsänen, A., Ferreira, C. S. S., & Kalantari, Z. (2020). Inventory and Connectivity Assessment of Wetlands in Northern Landscapes with a Depression-Based DEM Method. Water, 12(12), 3355. https://doi.org/10.3390/w12123355