Using Soil Moisture Sensors for Automated Irrigation Scheduling in a Plum Crop

 ,
, 
 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area and Irrigation System
2.2. Automatic Irrigation System
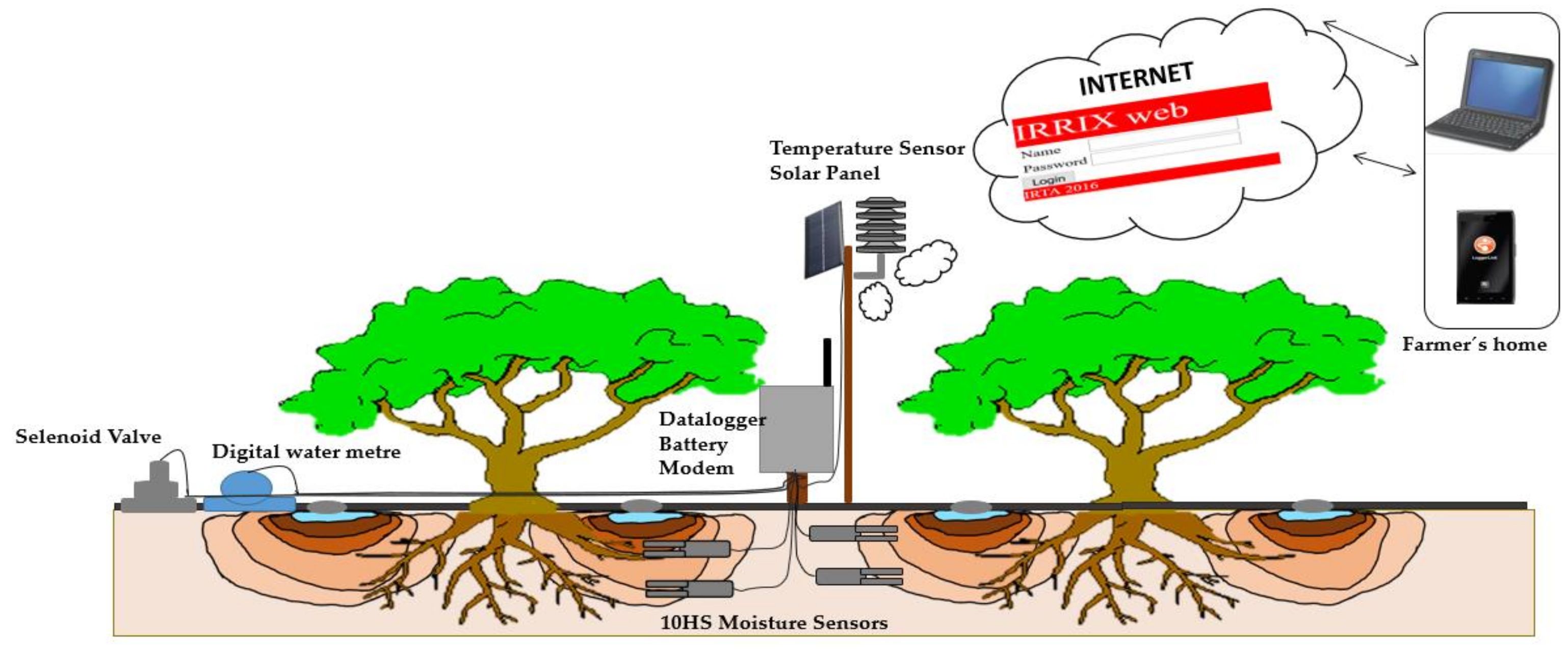
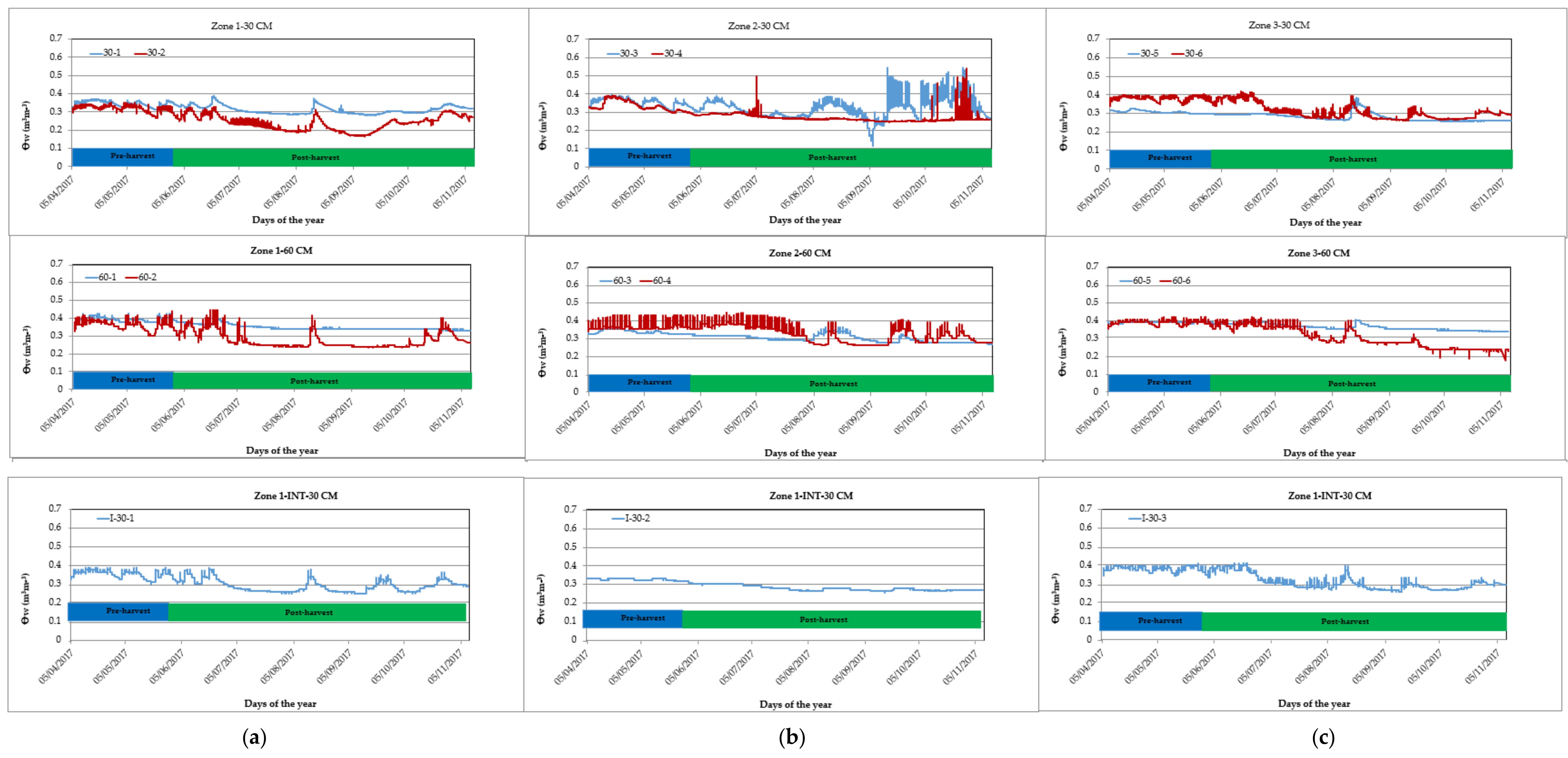
- To monitor the soil moisture content in the experiment, fifteen 10HS capacitance probes (Decagon Devices Inc., Pullman, WA, USA) were installed in three representative trees. Five probes were installed in each tree: two probes under the emitter at 0.3 m depth, two probes under the emitter at 0.6 m depth and one probe situated between emitters, approximately at a distance of 0.15 m horizontally under the dripper line. The IRRIX software evaluated every probe and established the reference levels.
- An air temperature sensor (CS2015, Campbell Scientific Inc., Logan, UT, USA) at a height of 3 m (in line with a tree row).
- Energy source: next to the temperature probe, a solar panel was installed with a 12V-7Ah lead battery and voltage regulator (BlueSolar PWM-Pro, Victron Energy Blue Power, De Paal, The Netherlands).
- Sensors for irrigation water application control: a 24V-50Hz solenoid valve (Rain Bird Europe SCN, Aix-en-Provence, France), a digital water meter (MTK, Zenner, Madrid, Spain) and a relay controller (SMD-CD16AC, Campbell Scientific Inc., Logan, UT, USA).
- Logger: all the above components were connected to a datalogger (CR1000, Campbell Scientific Inc., Logan, UT, USA) which stored the data once every 5 min.
- Captures data from the sensors installed in the field. The data were uploaded 4 times a day via IPv4/IPv6 to the IRRIX server.
- Data processing and interpretation: IRRIX analyzes all the input data to detect anomalies or important events in the system (irrigation, rain). As an indicator of the evolution of the soil’s water status, IRRIX is set for each sensor at the driest value recorded every day, soil water content (SWC), daily driest SWC (SWCd). Then, to reduce the variability between sensors, IRRIX normalizes these values specifically for each sensor, such as:where soil water content wilting point (SWCWP) and soil water content field capacity (SWCFC) correspond to the values that this sensor would take under conditions of wilting point and field capacity, respectively. In practice, SWCFC was taken at the beginning of the campaign from actual measurements of the system in field conditions, while SWCWP was assigned to the supposed value of SWC in wilting point for this type of soil.NSWCd = (SWCd − SWCWP)/(SWCFC − SWCWP)
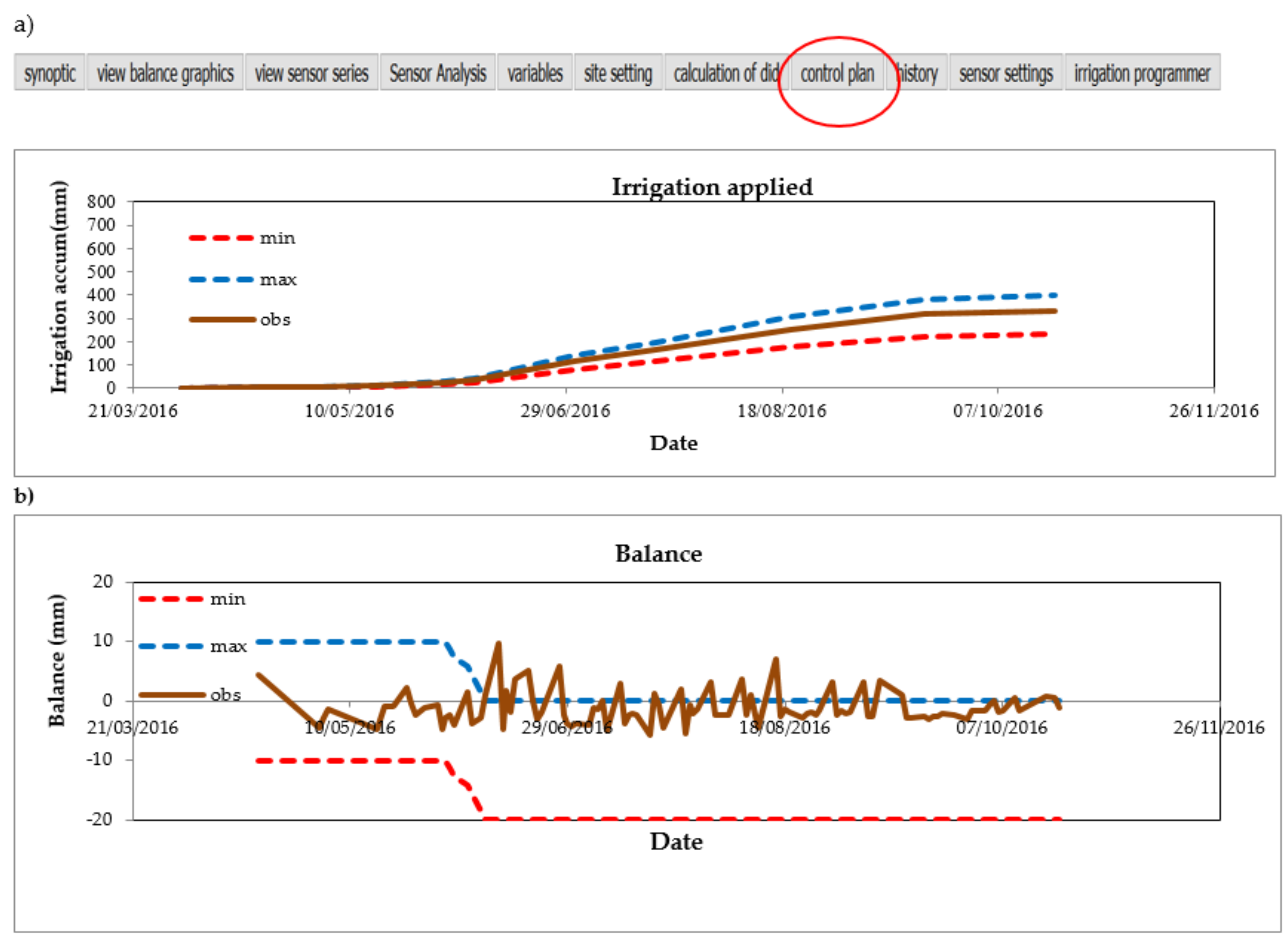
- Irrigation scheduling decision-making. IRRIX analyzes the dataset on a daily basis to determine and adjust the irrigation dose based on the information provided by the soil moisture sensors. IRRIX uses a control algorithm which combines a water-balance-based estimation of crop water needs (feed-forward control) with readjustment based on sensor readings (feedback control).
- Irrigation scheduling: IRRIX sends the updated irrigation doses to the datalogger. Then, the order is given to activate the other devices (relay, valve, pumps, etc.) to apply the required irrigation dose.
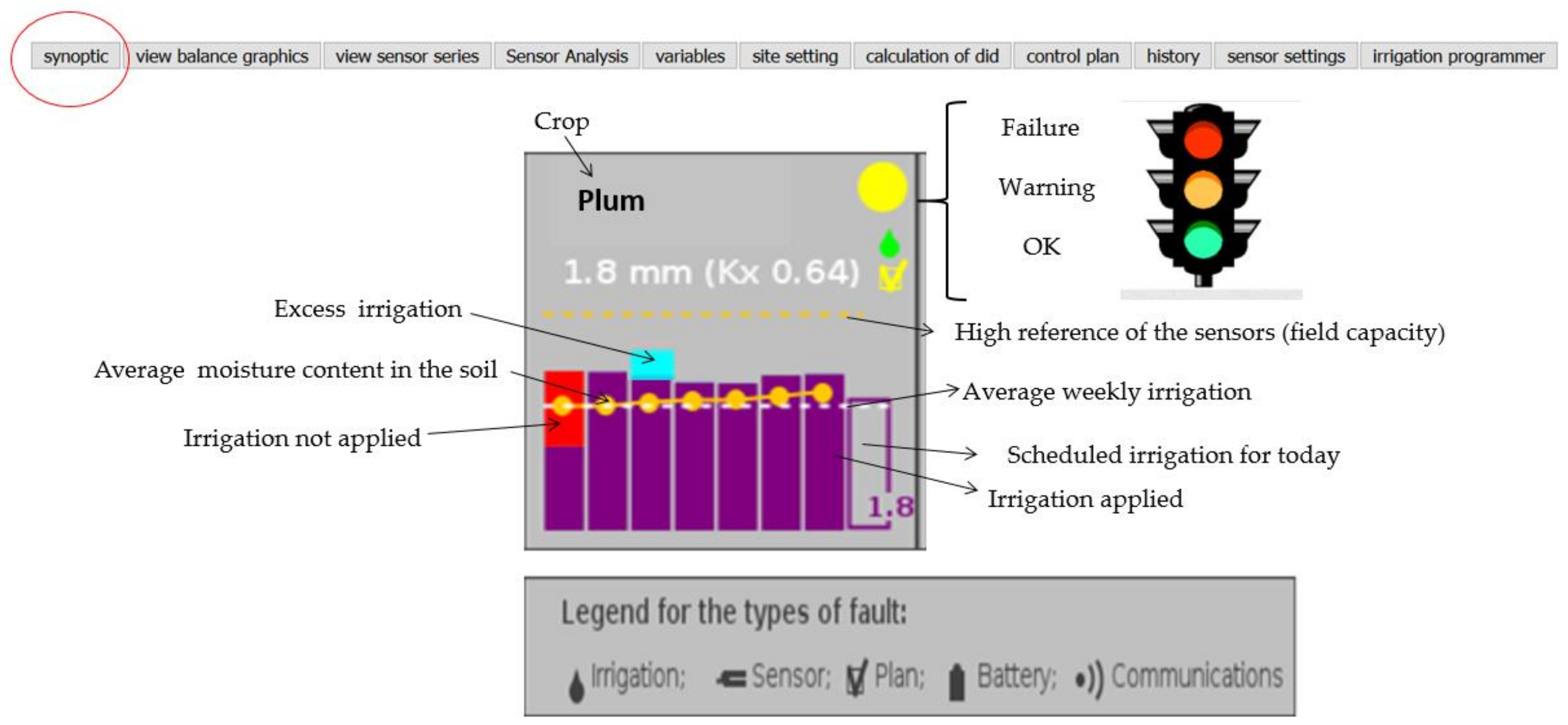
- User interaction: IRRIX is an automated system whose main purpose is to allow the user to carry out other tasks. The main function of the user is to verify that the system has operated correctly and that the irrigation campaign has been implemented as planned. If there is any anomaly in the system, the user must resolve it. To facilitate this process, a simplified interactive display panel is available with warning alerts.
- Irrigation strategy: In this case, it was decided to use an RDI strategy recommended for this cultivar in accordance with previous studies in the same area [20]. This strategy consists of avoiding a situation of water stress during the preharvest period (100% ETc) and reducing irrigation inputs during the postharvest period to replace 40% of the ETc and thereby induce a moderate water deficit.
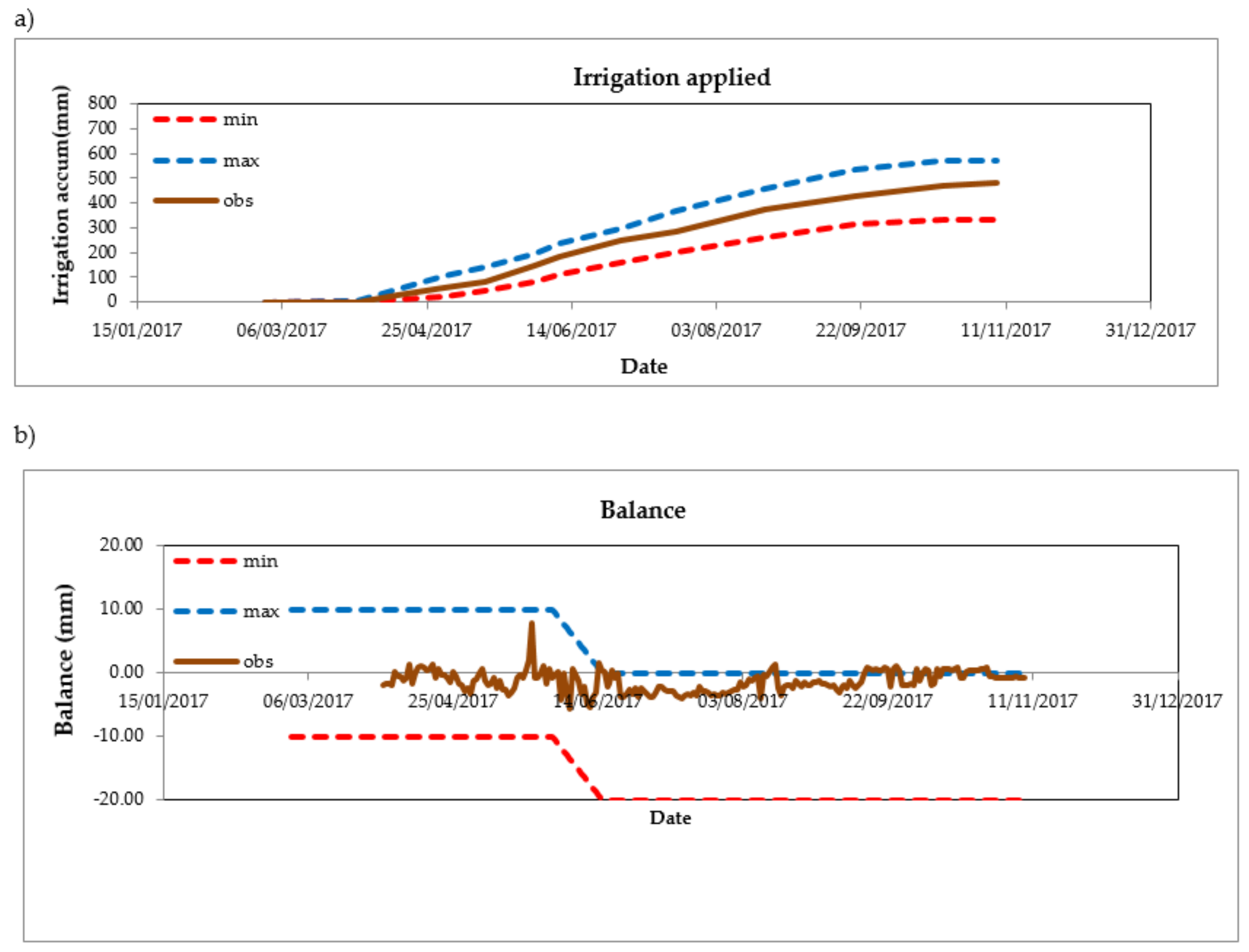
- Seasonal plan: This was based on a seasonal water consumption curve for the irrigation campaign determined on the basis of a calendar adjusted according to previous campaigns for the crop or plot, and in this case integrating the RDI strategy. Curves above and below this initial curve were established to determine the admissible bounds for the irrigation scheduling. These bounds were to ensure that irrigation inputs above those available for the campaign were not used and to ensure that a situation of sever water deficit did not arise.
- Soil comfort zone in relation to the dimensionless capacitive sensor readings: This soil comfort zone was used to determine the acceptable range for the soil moisture sensor measurements. The control system modulates the irrigation dose to maintain the soil moisture capacitive sensor measurements within this comfort zone. The system determines this comfort zone on an individual basis for each sensor and modifies it over the course of the season depending on the irrigation strategy employed.
2.3. Irrigation Treatments and Experimental Design
2.4. Measurements
2.4.1. Applied Water and Water Status
2.4.2. Trunk Cross-Sectional Area and Winter Pruning
2.4.3. Phenology and Yield
2.5. Statistical Analysis
3. Results and Discussion
3.1. Automatic Irrigation
3.2. Meteorological Conditions and Applied Water
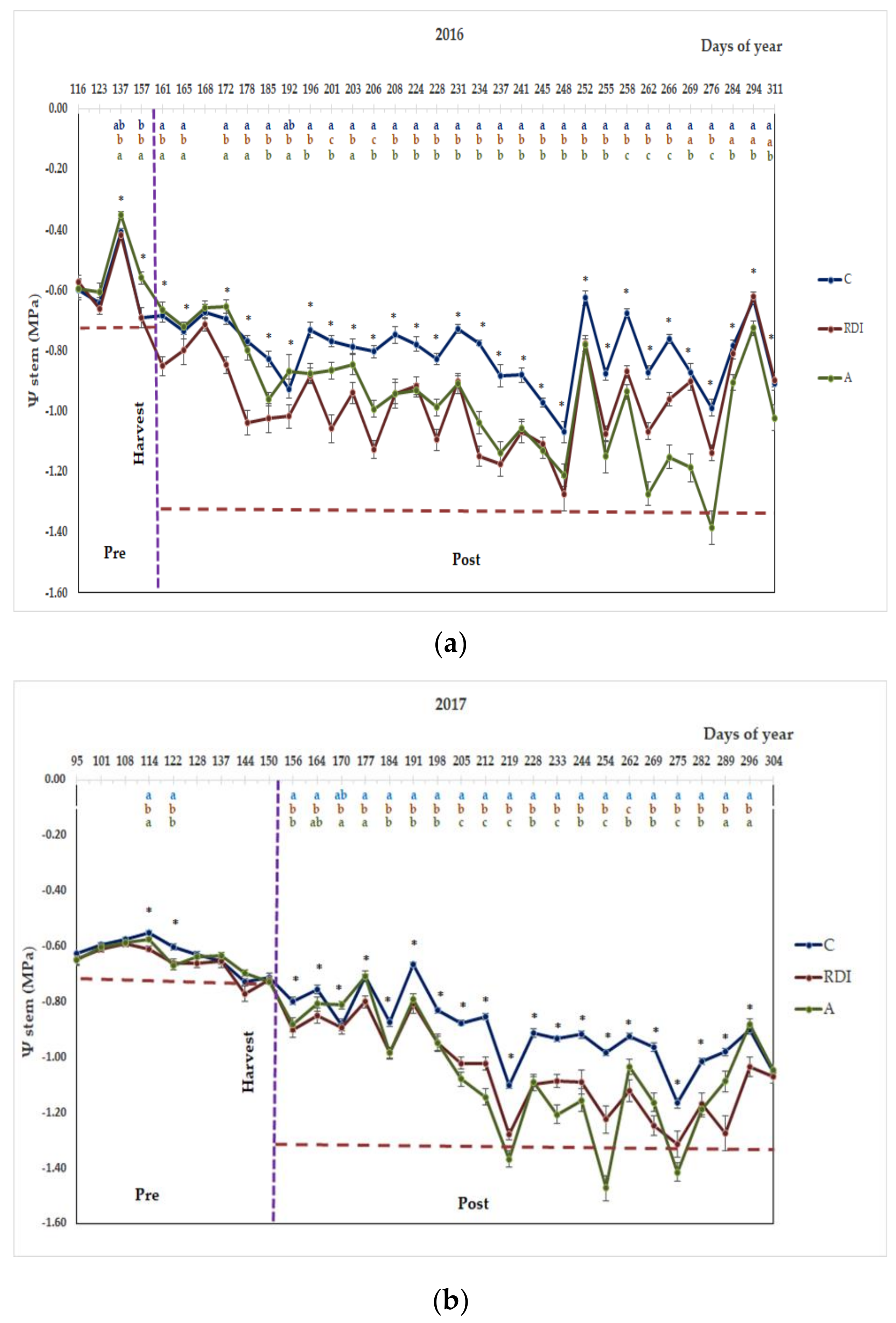
3.3. Tree Water Status
3.4. Vegetative and Reproductive Growth
3.5. Yield and Number of Fruit/Tree
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhu, X.; Chikangaise, P.; Shi, W.; Chen, W.; Yuan, S. Review of Intelligent Sprinkler Irrigation Technologies for Remote Autonomous System. Int. J. Agric. Biol. Eng. 2018, 11, 23–30. [Google Scholar] [CrossRef]
- Smith, M.; Pereira, L.; Berengena, J.; Itier, B.; Goussard, J.; Tollefson, L.; Van Hofwegen, P. Irrigation Scheduling: From Theory to Practice. In Proceedings of the ICID/FAO Workshop on Irrigation Scheduling, Rome, Italy, 12–13 September 1995. [Google Scholar]
- Casadesús, J.; Mata, M.; Marsal, J.; Girona, J. A General Algorithm for Automated Scheduling of Drip Irrigation in Tree Crops. Comput. Electron. Agric. 2012, 83, 11–20. [Google Scholar] [CrossRef]
- Shankar, V.; Ojha, C.; Prasad, K. Irrigation Scheduling for Maize and Indian-Mustard Based on Daily Crop Water Requirement in a Semi-Arid Region. Int. J. Civ. Environ. Eng. 2012, 6, 476–485. [Google Scholar]
- Lan, Y.; Thomson, S.J.; Huang, Y.; Hoffmann, W.C.; Zhang, H. Current Status and Future Directions of Precision Aerial Application for Site-Specific Crop Management in the USA. Comput. Electron. Agric. 2010, 74, 34–38. [Google Scholar] [CrossRef]
- Lianhao, L.; Xinyue, Z.; Xiaodong, Q.; Guiming, L. Analysis of the Decrease of Center Pivot Sprinkling System Uniformity and its Impact on Maize Yield. Int. J. Agric. Biol. Eng. 2016, 9, 108–119. [Google Scholar]
- Lin, Y.; Zhang, Z.; Xu, D.; Nie, T. Effect of Water and Fertilizer Coupling Optimization Test on Water use Efficiency of Rice in Black Soil Regions. J. Drain. Irrig. Mach. Eng. 2016, 34, 151–156. [Google Scholar]
- Duan, F.; Liu, J.; Fan, Y.; Chen, Z.; Han, Q.; Cao, H. Influential Factor Analysis of Spraying Effect of Light Hose-Fed Traveling Sprinkling System. J. Drain. Irrig. Mach. Eng. 2017, 35, 541–546. [Google Scholar]
- Kang, D.; Park, M.J.; Lee, D.H.; Rho, J.J. Mobile Services with Handset Bundling and Governmental Policies for Competitive Market. Telemat. Inform. 2017, 34, 323–337. [Google Scholar] [CrossRef]
- Romero, R.; Muriel, J.; García, I.; de La Peña, D.M. Research on Automatic Irrigation Control: State of the Art and Recent Results. Agric. Water Manag. 2012, 114, 59–66. [Google Scholar] [CrossRef]
- Osroosh, Y.; Peters, R.T.; Campbell, C.S.; Zhang, Q. Comparison of Irrigation Automation Algorithms for Drip-Irrigated Apple Trees. Comput. Electron. Agric. 2016, 128, 87–99. [Google Scholar] [CrossRef]
- Adeyemi, O.; Grove, I.; Peets, S.; Norton, T. Advanced Monitoring and Management Systems for Improving Sustainability in Precision Irrigation. Sustainability 2017, 9, 353. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration-Guidelines for Computing Crop Water Requirements-FAO Irrigation and Drainage Paper 56. Fao Rome 1998, 300, D05109. [Google Scholar]
- Farg, E.; Arafat, S.; El-Wahed, M.A.; El-Gindy, A. Estimation of Evapotranspiration ETc and Crop Coefficient Kc of Wheat, in South Nile Delta of Egypt using Integrated FAO-56 Approach and Remote Sensing Data. Egypt. J. Remote Sens. Space Sci. 2012, 15, 83–89. [Google Scholar] [CrossRef]
- Nolz, R.; Kammerer, G. Evaluating a Sensor Setup with Respect to Near-Surface Soil Water Monitoring and Determination of in-Situ Water Retention Functions. J. Hydrol. 2017, 549, 301–312. [Google Scholar] [CrossRef]
- Elmaloglou, S.; Soulis, K.X.; Dercas, N. Simulation of Soil Water Dynamics Under Surface Drip Irrigation from Equidistant Line Sources. Water Resour. Manag. 2013, 27, 4131–4148. [Google Scholar] [CrossRef]
- Fereres, E.; Soriano, M.A. Deficit Irrigation for Reducing Agricultural Water use. J. Exp. Bot. 2006, 58, 147–159. [Google Scholar] [CrossRef] [PubMed]
- Marsal, J.; Lopez, G.; Girona, J. Recent Advances in Regulated Deficit Irrigation (RDI) in Woody Perennials and Future Perspectives. Acta Hortic. 2008, 792, 429–439. [Google Scholar] [CrossRef]
- Costa, J.M.; Ortuño, M.F.; Chaves, M.M. Deficit Irrigation as a Strategy to Save Water: Physiology and Potential Application to Horticulture. J. Integr. Plant Biol. 2007, 49, 1421–1434. [Google Scholar] [CrossRef]
- Samperio, A.; Prieto, M.H.; Blanco-Cipollone, F.; Vivas, A.; Moñino, M.J. Effects of Post-Harvest Deficit Irrigation in ‘Red Beaut’Japanese Plum: Tree Water Status, Vegetative Growth, Fruit Yield, Quality and Economic Return. Agric. Water Manag. 2015, 150, 92–102. [Google Scholar] [CrossRef]
- Samperio, A.; Moñino, M.J.; Vivas, A.; Blanco-Cipollone, F.; Martín, A.G.; Prieto, M.H. Effect of Deficit Irrigation during Stage II and Post-Harvest on Tree Water Status, Vegetative Growth, Yield and Economic Assessment in ‘Angeleno’Japanese Plum. Agric. Water Manag. 2015, 158, 69–81. [Google Scholar] [CrossRef]
- Luthra, S.; Kaledonkar, M.; Singh, O.; Tyagi, N. Design and Development of an Auto Irrigation System. Agric. Water Manag. 1997, 33, 169–181. [Google Scholar] [CrossRef]
- Miranda, F.; Yoder, R.; Wilkerson, J.; Odhiambo, L. An Autonomous Controller for Site-Specific Management of Fixed Irrigation Systems. Comput. Electron. Agric. 2005, 48, 183–197. [Google Scholar] [CrossRef]
- Cáceres, R.; Casadesús, J.; Marfà, O. Adaptation of an Automatic Irrigation-Control Tray System for Outdoor Nurseries. Biosyst Eng. 2007, 96, 419–425. [Google Scholar] [CrossRef]
- Boutraa, T.; Akhkha, A.; Alshuaibi, A.; Atta, R. Evaluation of the Effectiveness of an Automated Irrigation System using Wheat Crops. Agric. Biol. J. N. Am. 2011, 2, 80–88. [Google Scholar] [CrossRef]
- Miller, L.; Vellidis, G.; Coolong, T. Comparing a Smartphone Irrigation Scheduling Application with Water Balance and Soil Moisture-Based Irrigation Methods: Part II—Plasticulture-Grown Watermelon. HortTechnology 2018, 28, 362–369. [Google Scholar] [CrossRef]
- Cardenas-Lailhacar, B.; Dukes, M.D.; Miller, G.L. Sensor-Based Automation of Irrigation on Bermudagrass during Dry Weather Conditions. J. Irrig. Drain. Eng. 2010, 136, 184–193. [Google Scholar] [CrossRef]
- Bacci, L.; Battista, P.; Rapi, B. An Integrated Method for Irrigation Scheduling of Potted Plants. Sci. Hortic. 2008, 116, 89–97. [Google Scholar] [CrossRef]
- Saab, A.; Therese, M.; Jomaa, I.; Skaf, S.; Fahed, S.; Todorovic, M. Assessment of a Smartphone Application for Real-Time Irrigation Scheduling in Mediterranean Environments. Water 2019, 11, 252. [Google Scholar] [CrossRef]
- Hargreaves, G.H. Defining and using Reference Evapotranspiration. J. Irrig. Drain. Eng. 1994, 120, 1132–1139. [Google Scholar] [CrossRef]
- Hargreaves, G.H.; Allen, R.G. History and Evaluation of Hargreaves Evapotranspiration Equation. J. Irrig. Drain. Eng. 2003, 129, 53–63. [Google Scholar] [CrossRef]
- Shackel, K.A.; Ahmadi, H.; Biasi, W.; Buchner, R.; Goldhamer, D.; Gurusinghe, S.; Hasey, J.; Kester, D.; Krueger, B.; Lampinen, B. Plant Water Status as an Index of Irrigation Need in Deciduous Fruit Trees. HortTechnology 1997, 7, 23–29. [Google Scholar] [CrossRef]
- Baggiolini, M. Les StadesRepérés Des ArbresFruitiers à Noyau. Rev. Romande Agric. Vitic. Arboric. 1952, 8, 3–4. [Google Scholar]
- Choi, K.; Choi, E.; Kim, I.S.; Lee, Y. Improving Water and Fertilizer use Efficiency during the Production of Strawberry in Coir Substrate Hydroponics using a FDR Sensor-Automated Irrigation System. Hortic. Environ. Biotechnol. 2016, 57, 431–439. [Google Scholar] [CrossRef]
- Kizito, F.; Campbell, C.; Campbell, G.; Cobos, D.; Teare, B.; Carter, B.; Hopmans, J. Frequency, Electrical Conductivity and Temperature Analysis of a Low-Cost Capacitance Soil Moisture Sensor. J. Hydrol. 2008, 352, 367–378. [Google Scholar] [CrossRef]
- Garnier, E.; Berger, A. Testing Water Potential in Peach Trees as an Indicator of Water Stress. J. Hortic. Sci. 1985, 60, 47–56. [Google Scholar] [CrossRef]
- McCutchan, H.; Shackel, K. Stem-Water Potential as a Sensitive Indicator of Water Stress in Prune Trees (Prunus Domestica L. Cv. French). J. Am. Soc. Hortic. Sci. 1992, 117, 607–611. [Google Scholar] [CrossRef]
- Scott Johnson, R.; Handley, D.; Day, K. Postharvest Water Stress of an Early Maturing Plum. J. Hortic. Sci. 1994, 69, 1035–1041. [Google Scholar] [CrossRef]
- Intrigliolo, D.; Castel, J. Response of Plum Trees to Deficit Irrigation Under Two Crop Levels: Tree Growth, Yield and Fruit Quality. Irrig. Sci. 2010, 28, 525–534. [Google Scholar] [CrossRef]
- Johnson, R.S.; Handley, D.; DeJong, T. Long-Term Response of Early Maturing Peach Trees to Postharvest Water Deficits. J. Am. Soc. Hortic. Sci. 1992, 117, 881–886. [Google Scholar] [CrossRef]
- Hsiao, T.C. Plant Responses to Water Stress. Annu. Rev. Plant Physiol. 1973, 24, 519–570. [Google Scholar] [CrossRef]
- Naor, A.; Peres, M.; Greenblat, Y.; Gal, Y.; Arie, B. Effects of Pre-Harvest Irrigation Regime and Crop Level on Yield, Fruit Size Distribution and Fruit Quality of Field-Grown ‘Black Amber’Japanese Plum. J. Hortic. Sci. Biotechnol. 2004, 79, 281–288. [Google Scholar] [CrossRef]
- Intrigliolo, D.; Ballester, C.; Castel, J. Carry-Over Effects of Deficit Irrigation Applied Over Seven Seasons in a Developing Japanese Plum Orchard. Agric. Water Manag. 2013, 128, 13–18. [Google Scholar] [CrossRef]
- Marsal, J.; Casadesus, J.; Lopez, G.; Mata, M.; Bellvert, J.; Girona, J. Sustainability of Regulated Deficit Irrigation in a Mid-Maturing Peach Cultivar. Irrig. Sci. 2016, 34, 201–208. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Phenology | 2016 | 2017 |
|---|---|---|
| Bud burst | 27 January 2016 | 30 January 2017 |
| Flowering | 29 February 2016 | 02 March 2017 |
| Harvest | 08 June 2016 | 29 May 2017 |
| Leaf fall | 20 November 2016 | 15 November 2017 |
| Parameters | 2016 | 2017 | ||||
|---|---|---|---|---|---|---|
| Pre 1 | Post 2 | Annual 3 | Pre 1 | Post 2 | Annual 3 | |
| ETo-PM (mm) | 330.77 | 955.30 | 1286.07 | 450.06 | 918.49 | 1368.55 |
| ETo-H (mm) | 358.36 | 937.99 | 1296.35 | 420.74 | 837.52 | 1258.26 |
| Rainfall (mm) | 269.38 | 256.25 | 525.63 | 175.08 | 108.52 | 283.60 |
| T mean (°C) | 12.59 | 19.20 | 15.89 | 13.41 | 19.69 | 16.55 |
| RH mean (%) | 80.14 | 65.54 | 72.84 | 71.42 | 58.05 | 64.73 |
| Irrigation (mm) | ||||||
| C | 33 | 570 | 603 | 245 | 569 | 814 |
| RDI | 31 | 250 | 281(45.96) | 208 | 297 | 506(37.84) |
| A | 32 | 302 | 334(44.62) | 143 | 336 | 479(41.16) |
| Crop data | Treatments | 2016 | 2017 | ||
|---|---|---|---|---|---|
| C | 6.20 ± 0.35 | a | 8.68 ± 0.87 | a | |
| Winter pruning of new wood (kg/tree) | RDI | 3.84 ± 0.49 | b | 4.46 ± 0.60 | b |
| A | 4.73 ± 0.34 | b | 5.38 ± 0.58 | b | |
| Significance | * | * | |||
| C | 8.35 ± 1.51 | a | 2.53 ± 0.44 | ||
| Winter pruning of old wood (kg/tree) | RDI | 5.11 ± 1.03 | ab | 2.52 ± 0.19 | |
| A | 4.09 ± 0.65 | b | 2.27 ± 0.32 | ||
| Significance | * | n.s. | |||
| C | 11.48 ± 0.45 | a | 9.94 ± 0.42 | a | |
| Summer pruning (kg/tree) | RDI | 9.56 ± 0.78 | b | 8.43 ± 0.66 | b |
| A | 10.55 ± 0.44 | ab | 9.02 ± 0.25 | ab | |
| Significance | * | * | |||
| C | 26.04 ± 1.63 | a | 21.15 ± 1.14 | a | |
| Total pruning (kg/tree) | RDI | 18.52 ± 1.83 | b | 15.42 ± 1.19 | b |
| A | 19.38 ± 0.96 | b | 16.67 ± 0.86 | b | |
| Significance | * | * | |||
| C | 65.54 ± 3.77 | 69.59 ± 5.31 | |||
| ΔTCSA (cm2) | RDI | 55.47 ± 4.62 | 69.39 ± 10.54 | ||
| A | 59.72 ± 6.11 | 67.41 ± 5.71 | |||
| Significance | n.s. | n.s. |
| Yield data | Treatments | 2016 | 2017 | 2018 | ||
|---|---|---|---|---|---|---|
| C | 15158 ± 2114.80 | 4076 ± 414.82 | b | 14491 ± 1090.55 | b | |
| Yield (kg/ha) | RDI | 14240 ± 2081.19 | 6229 ± 587.07 | a | 16448 ± 1538.96 | ab |
| A | 13697 ± 1652.65 | 7228 ± 818.03 | a | 19908 ± 1447.29 | a | |
| Significance | n.s. | * | * | |||
| C | 721 ± 113.62 | 130 ± 14.31 | b | 404 ± 29.08 | ||
| Number of fruit/trees | RDI | 681 ± 99.08 | 203 ± 19.21 | ab | 456 ± 50.78 | |
| A | 629 ± 88.67 | 237 ± 27.50 | a | 485 ± 34.86 | ||
| Significance | n.s. | * | n.s. |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Millán, S.; Casadesús, J.; Campillo, C.; Moñino, M.J.; Prieto, M.H. Using Soil Moisture Sensors for Automated Irrigation Scheduling in a Plum Crop. Water 2019, 11, 2061. https://doi.org/10.3390/w11102061
Millán S, Casadesús J, Campillo C, Moñino MJ, Prieto MH. Using Soil Moisture Sensors for Automated Irrigation Scheduling in a Plum Crop. Water. 2019; 11(10):2061. https://doi.org/10.3390/w11102061
Chicago/Turabian StyleMillán, Sandra, Jaume Casadesús, Carlos Campillo, María José Moñino, and Maria Henar Prieto. 2019. "Using Soil Moisture Sensors for Automated Irrigation Scheduling in a Plum Crop" Water 11, no. 10: 2061. https://doi.org/10.3390/w11102061
APA StyleMillán, S., Casadesús, J., Campillo, C., Moñino, M. J., & Prieto, M. H. (2019). Using Soil Moisture Sensors for Automated Irrigation Scheduling in a Plum Crop. Water, 11(10), 2061. https://doi.org/10.3390/w11102061