Influence of Disdrometer Type on Weather Radar Algorithms from Measured DSD: Application to Italian Climatology



 ,
,
Abstract
1. Introduction
2. Devices and Datasets Description
2.1. Experimental Data
2.2. Disdrometer Descriptions
2.3. Data Processing and Description
2.4. Computation of Weather Radar Measurements
3. Weather Radar Algorithms
4. Sensitivity of Weather Radar Algorithms to Disdrometer Type
5. Weather Radar Algorithms for Italian Climatology
6. Conclusions
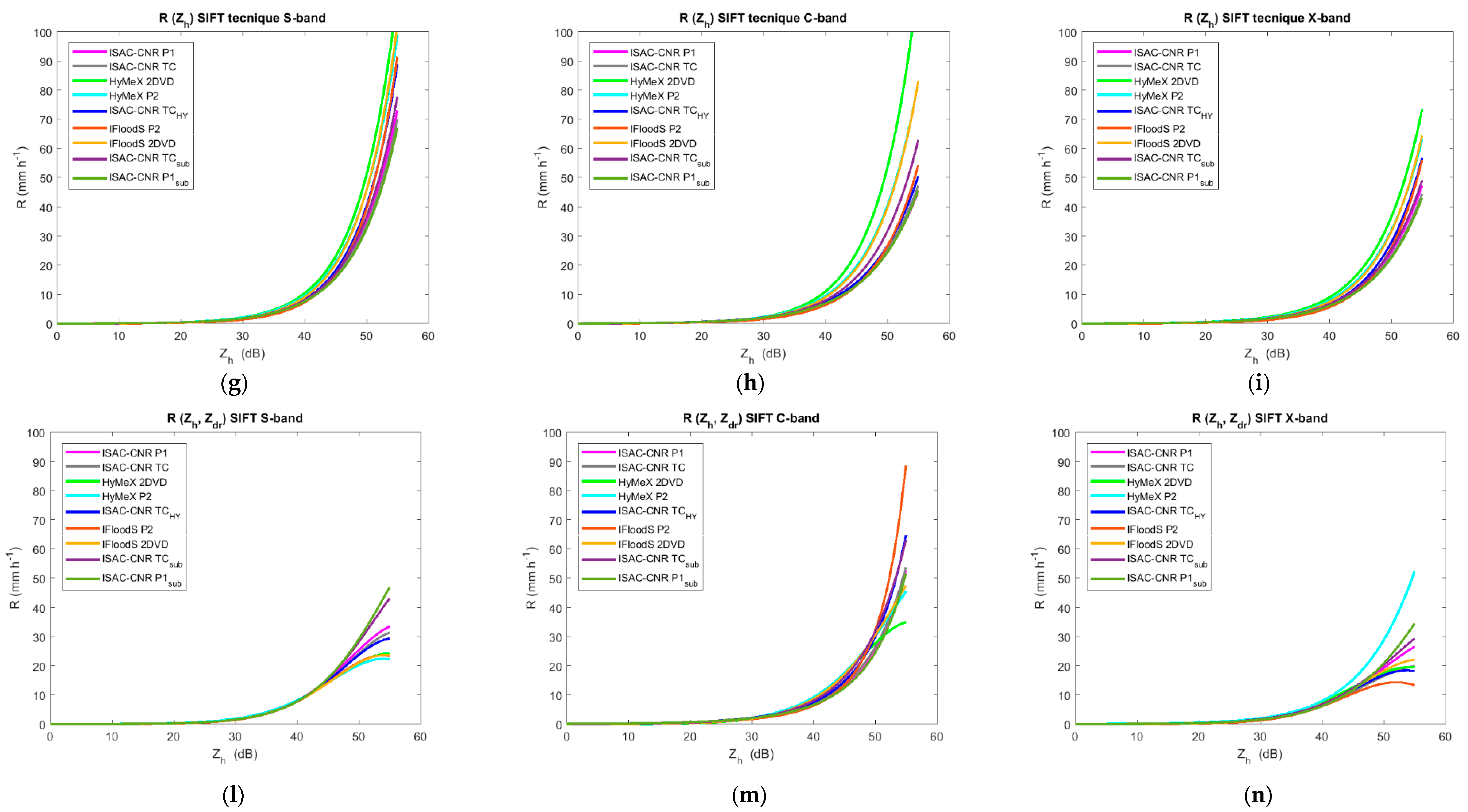
- as also demonstrated in [17], we confirm that the use of the SIFT approach to establish the R-Zh relation from measured DSDs makes it possible to reduce the intrinsic error of the parameterization, or, in other words, to provide a more stable relation. We found, for all three bands, a reduction in the NMAE of between 50% and 60% when the SIFT approach was used;
- testing the effect of the SIFT approach on all the other weather radar algorithms considered in this study, we found that the specific attenuation estimators (i.e., Equations (8) and (9)) and the polarimetric rainfall rate estimators (i.e., Equations (11)–(13)) also benefit from the application of SIFT. A reduction of NMAE of between 10% and 50% was obtained for these estimators, with a few exceptions for the R(Zh,Zdr) relation at C- and X-band;
- the reduction of the NMAE due to the application of the SIFT approach is independent of the type of disdrometer used to collect the data.
- the SIFT approach does not have a clear and unequivocal effect on the comparison between weather radar algorithm obtained from different disdrometer types. In other words, although SIFT reduces the scatter of the data along the best fit relation, it conserves the differences among the devices; in fact, the disagreement obtained when comparing different devices, although limited, is not always reduced when the SIFT approach is adopted instead of the 1-min DRM;
- the coefficients of the relations for rain rate and specific attenuation estimation in Equations (8)–(13) derived from different DSD datasets are similar; also, the parameterization errors are comparable;
- the comparison of radar algorithms obtained from different types of laser disdrometers (namely P1, P2 or TC) gives an error of less than 10% for all (except for very few exceptions) of the considered relations and frequencies;
- the agreement in terms of radar algorithm estimates between P2 and 2DVD (which is considered the most accurate commercial disdrometer for measurements of DSD) is a bit lower, in particular at S- and C-band, with differences in rainfall rate (differential attenuation) estimates that can reach 30% at C-band when the R(Zh) (ad(Kdp)) estimator is considered;
- limiting the comparison to moderate rainfall (2.5 mm h−1 < R < 10 mm h−1), the disagreement between 2DVD and P2 estimates R(Zh) and R(Zdr, Kdp) decreases (maximum values 10%);
- it is confirmed that polarimetric rain rate estimators seem to be less sensitive to disdrometer type with respect to the R(Zh) relation, in particular at C-band.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Marshall, J.S.; Palmer, W.M. The distribution of raindrops with size. J. Meteorol. 1948, 9, 327–332. [Google Scholar] [CrossRef]
- Bringi, V.N.; Chandrasekar, V. Polarimetric Doppler Weather Radar Principles and Applications; Cambridge University Press: Cambridge, UK, 2001; p. 648. ISBN 0-521-62384-7. [Google Scholar]
- Tapiador, F.J.; Checa, R.; De Castro, M. An experiment to measure the spatial variability of rain drop size distribution using sixteen laser disdrometers. Geophys. Res. Lett. 2010, 37, L16803. [Google Scholar] [CrossRef]
- Battan, L.J. Radar Observation of the Atmosphere; University of Chicago Press: Chicago, IL, USA, 1973; ISBN 9780226039190. [Google Scholar]
- Gorgucci, E.; Scarchilli, G.; Chandrasekar, V.; Bringi, V.N. Rainfall estimation from polarimetric radar measurements: Composite algorithms immune to variability in raindrop shape–size relation. J. Atmos. Ocean. Technol. 2001, 18, 1773–1786. [Google Scholar] [CrossRef]
- Bringi, V.N.; Chandrasekar, V.; Balakrishnan, N.; Zrnić, D.S. An Examination of Propagation Effects in Rainfall on Radar Measurements at Microwave Frequencies. J. Atmos. Ocean. Technol. 1990, 7, 829–840. [Google Scholar] [CrossRef]
- Tokay, A.; Kruger, A.; Krajewski, W. Comparison of drop-size distribution measurements by impact and optical disdrometers. J. Appl. Meteorol. 2001, 40, 2083–2097. [Google Scholar] [CrossRef]
- Adirosi, E.; Gorgucci, E.; Baldini, L.; Tokay, A. Evaluation of gamma raindrop size distribution assumption through comparison of rain rates of measured and radar-equivalent gamma DSD. J. Appl. Meteorol. Climatol. 2014, 53, 1618–1635. [Google Scholar] [CrossRef]
- Adirosi, E.; Baldini, L.; Lombardo, F.; Russo, F.; Napolitano, F.; Volpi, E.; Tokay, A. Comparison of different fittings of drop spectra for rainfall retrievals. Adv. Water Resour. 2015, 83, 55–67. [Google Scholar] [CrossRef]
- Adirosi, E.; Volpi, E.; Lombardo, F.; Baldini, L. Raindrop size distribution: Fitting performance of common theoretical models. Adv. Water Resour. 2016, 96, 290–305. [Google Scholar] [CrossRef]
- Johnson, R.W.; Kliche, D.V.; Smith, P.L. Comparison of estimators for parameters of gamma distributions with left-truncated samples. J. Appl. Meteorol. Climatol. 2011, 50, 296–310. [Google Scholar] [CrossRef]
- Chandrasekar, V.; Bringi, V.N.; Balakrishnan, N.; Zrnic, D.S. Error structure of multiparameter radar and surface measurements of rainfall. Part III: Specific differential phase. J. Atmos. Ocean. Technol. 1990, 7, 621–629. [Google Scholar] [CrossRef]
- Smith, P.L.; Liu, Z.; Joss, J. A study of sampling-variability effects in raindrop size observations. J. Appl. Meteorol. 1993, 32, 1259–1269. [Google Scholar] [CrossRef]
- Smith, P.L. Sampling issues in estimating radar variables from disdrometer data. J. Atmos. Ocean. Technol. 2016, 33, 2305–2313. [Google Scholar] [CrossRef]
- Gorgucci, E.; Baldini, L. An examination of the validity of the mean raindrop-shape model for dual-polarization radar rainfall retrievals. IEEE Geosci. Remote Sens. 2009, 47, 2752–2761. [Google Scholar] [CrossRef]
- Tapiador, F.J.; Turk, F.J.; Petersen, W.; Hou, A.Y.; Garcia-Ortega, E.; Machado, L.A.T.; Angelis, C.F.; Salio, P.; Kidd, C.; Huffman, G.J.; et al. Global precipitation measurement: Methods, datasets and applications. Atmos. Res. 2012, 104, 70–97. [Google Scholar] [CrossRef]
- Lee, G.W.; Zawadzki, I. Variability of drop size distributions: Noise and noise filtering in disdrometric data. J. Appl. Meteorol. 2005, 44, 634–652. [Google Scholar] [CrossRef]
- Cao, Q.; Zhang, G.; Brandes, E.; Schuur, T.; Ryzhkov, A.; Ikeda, K. Analysis of video disdrometer and polarimetric radar data to characterize rain microphysics in Oklahoma. J. Appl. Meteorol. Climatol. 2008, 47, 2238–2255. [Google Scholar] [CrossRef]
- Park, S.G.; Kim, H.L.; Ham, Y.W.; Jung, S.H. Comparative evaluation of the OTT PARSIVEL2 using a collocated two-dimensional video disdrometer. J. Atmos. Ocean. Technol. 2017, 34, 2059–2082. [Google Scholar] [CrossRef]
- Chen, H.; Chandrasekar, V.; Bechini, R. An improved dual-polarization radar rainfall algorithm (DROPS2.0): Application in NASA IFloodS field campaign. J. Hydrometeorol. 2017, 18, 917–937. [Google Scholar] [CrossRef]
- Lanza, L.G.; Vuerich, E. Non-parametric analysis of one-minute rain intensity measurements from the WMO Field Intercomparison. Atmos. Res. 2012, 103, 52–59. [Google Scholar] [CrossRef]
- Gertzman, H.S.; Atlas, D. Sampling errors in the measurement of rain and hail parameters. J. Geophys. Res. 1977, 82, 4955–4966. [Google Scholar] [CrossRef]
- Wong, R.K.W.; Chidambaram, N. Gamma size distribution and stochastic sampling errors. J. Clim. Appl. Meteorol. 1985, 24, 568–579. [Google Scholar] [CrossRef]
- Nešpor, V.; Krajewski, W.F.; Kruger, A. Wind-induced error of raindrop size distribution measurement using a two-dimensional video disdrometer. J. Atmos. Ocean. Technol. 2000, 17, 1483–1492. [Google Scholar] [CrossRef]
- Friedrich, K.; Kalina, E.A.; Masters, F.J.; Lopez, C.R. Drop-size distributions in thunderstorms measured by optical disdrometers during VORTEX2. Mon. Weather Rev. 2013, 141, 1182–1203. [Google Scholar] [CrossRef]
- Upton, G.; Brawn, D. An investigation of factors affecting the accuracy of thies disdrometers. In Proceedings of the Technical Conference on Instruments and Methods of Observation (TECO-2008), St. Petersburg, Russia, 27–28 November 2008. [Google Scholar]
- Thurai, M.; Petersen, W.A.; Tokay, A.; Schultz, C.; Gatlin, P. Drop size distribution comparisons between Parsivel and 2-D video disdrometers. Adv. Geosci. 2011, 30, 3–9. [Google Scholar] [CrossRef]
- Tokay, A.; Petersen, W.A.; Gatlin, P.; Wingo, M. Comparison of raindrop size distribution measurements by collocated disdrometers. J. Atmos. Ocean. Techol. 2013, 30, 1672–1690. [Google Scholar] [CrossRef]
- Tokay, A.; Wolff, D.B.; Petersen, W.A. Evaluation of the new version of the laser-optical disdrometer, OTT Parsivel2. J. Atmos. Ocean. Techol. 2014, 31, 1276–1288. [Google Scholar] [CrossRef]
- Ferretti, R.; Pichelli, E.; Gentile, S.; Maiello, I.; Cimini, D.; Davolio, S.; Miglietta, M.M.; Panegrossi, G.; Baldini, L.; Pasi, F.; et al. Overview of the first HyMeX special observation period over italy: Observations and model results. Hydrol. Earth Syst. Sci. 2014, 18, 1953–1977. [Google Scholar] [CrossRef]
- Roberto, N.; Adirosi, E.; Baldini, L.; Casella, D.; Dietrich, S.; Gatlin, P.; Panegrossi, G.; Petracca, M.; Sanò, P.; Tokay, A. Multi-sensor analysis of convective activity in central Italy during the HyMeX SOP 1.1. Atmos. Meas. Technol. 2016, 9, 535–552. [Google Scholar] [CrossRef]
- Petersen, W.; Gatlin, P. GPM Ground Validation Autonomous Parsivel Unit (APU) IFloodS [APU01, APU03, APU10]; NASA EOSDIS Global Hydrology Resource Center Distributed Active Archive Center: Huntsville, AL, USA, 2013. Available online: http://ghrc.nsstc.nasa.gov (accessed on 11 July 2016).
- Petersen, W.; Gatlin, P. GPM Ground Validation Two-Dimensional Video Disdrometer (2DVD) IFloodS [SN25, SN36, SN38]; NASA EOSDIS Global Hydrology Resource Center Distributed Active Archive Center: Huntsville, AL, USA, 2013. Available online: http://ghrc.nsstc.nasa.gov (accessed on 11 July 2016).
- Löffler-Mang, M.; Joss, J. An optical disdrometer for measuring size and velocity of hydrometeors. J. Atmos. Ocean. Technol. 2000, 17, 130–139. [Google Scholar] [CrossRef]
- Lanzinger, E.; Theel, M.; Windolph, H. Rainfall amount and intensity measured by the Thies laser precipitation monitor. In Proceedings of the WMO Technical Conference on Meteorological and Environmental Instruments and Methods of Observation (TECO), Geneva, Switzerland, 4–6 December 2006. [Google Scholar]
- Angulo-Martínez, M.; Beguería, S.; Latorre, B.; Fernández-Raga, M. Comparison of precipitation measurements by Ott Parsivel2 and Thies LPM optical disdrometers. Hydrol. Earth Syst. Sci. Discuss. 2017. [Google Scholar] [CrossRef]
- Bernauer, F.; Hürkamp, K.; Rühm, W.; Tschiersch, J. On the consistency of 2-D video disdrometers in measuring microphysical parameters of solid precipitation. Atmos. Meas. Technol. 2015, 8, 3251–3261. [Google Scholar] [CrossRef]
- Atlas, D.; Srivastava, R.C.; Sekhon, R.S. Doppler radar characteristics of precipitation at vertical incidence. Rev. Geophys. 1973, 11, 1–35. [Google Scholar] [CrossRef]
- Marzuki, M.; Hashiguchi, H.; Yamamoto, M.K.; Mori, S.; Yamanaka, M.D. Regional variability of raindrop size distribution over Indonesia. Ann. Geophys. 2013, 31, 1941–1948. [Google Scholar] [CrossRef]
- Thurai, M.; Bringi, V.N.; May, P.T. CPOL radar-derived drop size distribution statistics of stratiform and convective rain for two regimes in Darwin, Australia. J. Atmos. Ocean. Techol. 2010, 27, 932–942. [Google Scholar] [CrossRef]
- Barber, P.W.; Yen, C. Scattering of electromagnetic waves by arbitrarily shaped dielectric bodies. Appl. Opt. 1975, 14, 2864–2872. [Google Scholar] [CrossRef] [PubMed]
- Mishchenko, M.I.; Travis, L.D.; Mackowski, D.W. T-matrix computations of light scattering by nonspherical particles: A review. J. Quant. Spectrosc. Radiat. Transf. 1996, 55, 535–575. [Google Scholar] [CrossRef]
- Beard, K.V.; Chuang, C. A new model for the equilibrium shape of raindrops. J. Atmos. Sci. 1987, 44, 1509–1524. [Google Scholar] [CrossRef]
- Gorgucci, E.; Chandrasekar, V.; Baldini, L. Can a unique model describe the raindrop shape–size relation? A clue from polarimetric radar measurements. J. Atmos. Ocean. Technol. 2009, 26, 1829–1842. [Google Scholar] [CrossRef]
- Gorgucci, E.; Chandrasekar, V.; Baldini, L. Microphysical retrievals from dual-polarization radar measurements at X band. J. Atmos. Ocean. Technol. 2008, 25, 729–741. [Google Scholar] [CrossRef]
- Carey, L.D.; Petersen, W.A. Sensitivity of C-band polarimetric radar–based drop size estimates to maximum diameter. J. Appl. Meteorol. Climatol. 2015, 54, 1352–1371. [Google Scholar] [CrossRef]
- Leinonen, J.; Moisseev, D.; Leskinen, M.; Petersen, W.A. A climatology of disdrometer measurements of rainfall in Finland over five years with implications for global radar observations. J. Appl. Meteorol. Climatol. 2012, 51, 392–404. [Google Scholar] [CrossRef]
- Matrosov, S.Y.; Cifelli, R.; Neiman, P.J.; White, A.B. Radar rain-rate estimators and their variability due to rainfall type: An assessment based on hydrometeorology testbed data FROM the southeastern United States. J. Appl. Meteorol. Climatol. 2016, 55, 1345–1358. [Google Scholar] [CrossRef]
- Kottek, M.; Grieser, J.; Beck, C.; Rudolf, B.; Rubel, F. World map of the Köppen-Geiger climate classification updated. Meteorol. Z. 2006, 15, 259–263. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset Name | Type of Device | Location | Time Period | n. Rainy Min. | Rmean (mm h−1) | Rmax (mm h−1) | % C | % S |
|---|---|---|---|---|---|---|---|---|
| ISAC-CNR P1 | P1 | Rome, IT | June 2010–March 2016 | 82,792 | 2.25 | 133.4 | 3.58 | 94.88 |
| ISAC-CNR TC | TC | Rome, IT | September 2012–November 2017 | 72,520 | 2.59 | 117.2 | 4.70 | 93.36 |
| HyMeX P2 | P2 | Rome, IT | September–November 2012 | 3306 | 2.41 | 69.68 | 3.62 | 95.01 |
| HyMeX 2DVD | 2DVD | Rome, IT | September–November 2012 | 3610 | 3.32 | 113.94 | 6.43 | 90.12 |
| IFloodS 2DVD | 2DVD | Iowa, USA | April–June 2013 | 31,109 | 2.61 | 200.18 | 4.78 | 92.29 |
| IFloodS P2 | P2 | Iowa, USA | April–June 2013 | 40,685 | 2.27 | 158.32 | 3.72 | 94.36 |
| ISAC-CNR P1sub | P1 | Rome, IT | September–November 2015 | 3164 | 2.05 | 92.18 | 4.36 | 94.50 |
| ISAC-CNR TCsub | TC | Rome, IT | September–November 2015 | 3232 | 2.10 | 81.12 | 4.39 | 94.24 |
| ISAC-CNR TCHY | TC | Rome, IT | September–November 2012 | 2612 | 3.20 | 107.60 | 5.70 | 91.92 |
| S-Band—NMAE | ||||||
| ISAC-CNR P1 | ISAC-CNR TC | HyMeX P2 | HyMeX 2DVD | IFloodS P2 | IFloodS 2DVD | |
| ah = α1 Kdp | 0.032 | 0.034 | 0.053 | 0.032 | 0.023 | 0.027 |
| ad = α2 Kdp | 0.390 | 0.287 | 0.090 | 0.100 | 0.494 | 0.109 |
| R = α3 Zhβ3 | 0.198 | 0.188 | 0.203 | 0.195 | 0.115 | 0.198 |
| R = α4 Zhβ4Zdrγ4 | 0.012 | 0.025 | 0.064 | 0.075 | 0.015 | 0.045 |
| R = α5 Kdp | 0.085 | 0.080 | 0.082 | 0.080 | 0.089 | 0.061 |
| R = α6 Zdrβ6Kdpγ6 | 0.046 | 0.048 | 0.063 | 0.062 | 0.044 | 0.055 |
| C-Band—NMAE | ||||||
| ISAC-CNR P1 | ISAC-CNR TC | HyMeX P2 | HyMeX 2DVD | IFloodS P2 | IFloodS 2DVD | |
| ah = α1 Kdp | 0.216 | 0.200 | 0.118 | 0.150 | 0.204 | 0.146 |
| ad = α2 Kdp | 0.383 | 0.314 | 0.271 | 0.302 | 0.370 | 0.316 |
| R = α3 Zhβ3 | 0.257 | 0.248 | 0.233 | 0.195 | 0.160 | 0.237 |
| R = α4 Zhβ4Zdrγ4 | −0.048 | −0.042 | 0.087 | 0.100 | −0.062 | 0.045 |
| R = α5 Kdp | 0.058 | 0.058 | 0.092 | 0.084 | 0.058 | 0.056 |
| R = α6 Zdrβ6Kdpγ6 | 0.100 | 0.108 | 0.104 | 0.113 | 0.100 | 0.102 |
| X-Band—NMAE | ||||||
| ISAC-CNR P1 | ISAC-CNR CT | HyMeX P2 | HyMeX 2DVD | IFloodS P2 | IFloodS 2DVD | |
| ah = α1 Kdp | 0.054 | 0.059 | 0.101 | 0.087 | 0.061 | 0.051 |
| ad = α2 Kdp | 0.146 | 0.103 | 0.143 | 0.121 | 0.112 | 0.088 |
| R = α3 Zhβ3 | 0.216 | 0.205 | 0.221 | 0.215 | 0.122 | 0.206 |
| R = α4 Zhβ4Zdrγ4 | −0.053 | −0.002 | −0.037 | 0.022 | −0.094 | −0.031 |
| R = α5 Kdp | 0.047 | 0.046 | 0.058 | 0.051 | 0.044 | 0.041 |
| R = α6 Zdrβ6Kdpγ6 | 0.074 | 0.074 | 0.079 | 0.069 | 0.071 | 0.066 |
| S-Band—NB | ||||||
| ISAC-CNR P1 | ISAC-CNR TC | HyMeX P2 | HyMeX 2DVD | IFloodS P2 | IFloodS 2DVD | |
| ah = α1 Kdp | −0.036 | −0.024 | 0.036 | 0.025 | −0.081 | 0.009 |
| ad = α2 Kdp | 0.318 | 0.219 | 0.033 | 0.069 | 0.479 | 0.064 |
| R = α3 Zhβ3 | 0.012 | 0.008 | 0.007 | −0.016 | −0.061 | 0.003 |
| R = α4 Zhβ4Zdrγ4 | −0.038 | −0.023 | 0.006 | 0.025 | −0.016 | −0.005 |
| R = α5 Kdp | 0.055 | 0.046 | 0.053 | 0.065 | 0.050 | 0.028 |
| R = α6 Zdrβ6Kdpγ6 | −0.004 | 0.002 | 0.007 | 0.023 | 0.005 | 0.009 |
| C-Band—NB | ||||||
| ISAC-CNR P1 | ISAC-CNR TC | HyMeX P2 | HyMeX 2DVD | IFloodS P2 | IFloodS 2DVD | |
| ah = α1 Kdp | 0.053 | 0.034 | 0.005 | 0.079 | 0.026 | 0.019 |
| ad = α2 Kdp | 0.119 | 0.073 | 0.073 | 0.163 | 0.065 | 0.066 |
| R = α3 Zhβ3 | 0.166 | 0.149 | 0.076 | 0.027 | 0.048 | 0.112 |
| R = α4 Zhβ4Zdrγ4 | −0.015 | −0.028 | 0.031 | 0.012 | 0.016 | 0.018 |
| R = α5 Kdp | 0.032 | 0.030 | 0.061 | 0.067 | 0.021 | 0.025 |
| R = α6 Zdrβ6Kdpγ6 | 0.010 | 0.014 | 0.011 | 0.022 | 0.029 | 0.024 |
| X-Band—NB | ||||||
| ISAC-CNR P1 | ISAC-CNR CT | HyMeX P2 | HyMeX 2DVD | IFloodS P2 | IFloodS 2DVD | |
| ah = α1Kdp | 0.009 | 0.005 | 0.042 | 0.052 | 0.002 | 0.004 |
| ad = α2 Kdp | 0.051 | 0.031 | 0.060 | 0.076 | 0.023 | 0.028 |
| R = α3 Zhβ3 | 0.018 | 0.007 | 0.029 | −0.017 | −0.063 | −0.035 |
| R = α4 Zhβ4Zdrγ4 | −0.060 | −0.026 | 0.013 | −0.005 | −0.100 | −0.045 |
| R = α5 Kdp | 0.025 | 0.022 | 0.037 | 0.039 | 0.017 | 0.018 |
| R = α6 Zdrβ6Kdpγ6 | 0.010 | 0.012 | 0.025 | 0.027 | 0.020 | 0.016 |
| S-Band | |||||
| ISAC-CNR P1 vs. ISAC-CNR TC | ISAC-CNR P1sub vs. ISAC-CNR TCsub | ISAC-CNR TCHy vs. HyMeX P2 | HyMeX 2DVD vs. HyMeX P2 | IFloodS 2DVD vs. IFloodS P2 | |
| ah = α1 Kdp | 5% (3%) | 2% (2%) | 5% (7%) | 15% (3%) | 14% (2%) |
| ad = α2 Kdp | 11% (5%) | 8% (18%) | 1% (5%) | 109% (69%) | 84% (31%) |
| R = α3 Zhβ3 | 2% (5%) | 8% (11%) | 15% (10%) | 14% (12%) | 19% (14%) |
| R = α4 Zhβ4Zdrγ4 | 6% (5%) | 10% (4%) | 3% (3%) | 17% (16%) | 10% (2%) |
| R = α5 Kdp | 5% (6%) | 6% (5%) | 9% (6%) | 19% (18%) | 13% (10%) |
| R = α6 Zdrβ6Kdpγ6 | 5% (3%) | 9% (2%) | 1% (3%) | 7% (13%) | 6% (2%) |
| C-Band | |||||
| ISAC-CNR P1 vs. ISAC-CNR TC | ISAC-CNR P1sub vs. ISAC-CNR TCsub | ISAC-CNR TCHy vs. HyMeX P2 | HyMeX 2DVD vs. HyMeX P2 | IFloodS 2DVD vs. IFloodS P2 | |
| ah = α1 Kdp | 2% (3%) | 9% (14%) | 0% (10%) | 19% (11%) | 21% (21%) |
| ad = α2 Kdp | 9% (11%) | 6% (14%) | 6% (10%) | 34% (22%) | 34% (34%) |
| R = α3 Zhβ3 | 6% (3%) | 15% (22%) | 28% (24%) | 28% (32%) | 29% (33%) |
| R = α4Zhβ4Zdrγ4 | 4% (2%) | 10% (20%) | 13% (9%) | 16% (17%) | 6% (32%) |
| R = α5 Kdp | 9% (10%) | 2% (0%) | 12% (10%) | 14% (16%) | 7% (8%) |
| R = α6 Zdrβ6Kdpγ6 | 5% (5%) | 2% (1%) | 1% (16%) | 6% (4%) | 5% (5%) |
| X-Band | |||||
| ISAC-CNR P1 vs. ISAC-CNR TC | ISAC-CNR P1sub vs. ISAC-CNR TCsub | ISAC-CNR TCHy vs. HyMeX P2 | HyMeX 2DVD vs. HyMeX P2 | IFloodS 2DVD vs. IFloodS P2 | |
| ah = α1 Kdp | 4% (4%) | 3% (4%) | 7% (5%) | 5% (8%) | 1% (1%) |
| ad = α2 Kdp | 0% (1%) | 7% (8%) | 6% (2%) | 15% (19%) | 8% (8%) |
| R = α3 Zhβ3 | 2% (6%) | 8% (10%) | 18% (12%) | 9% (13%) | 18% (19%) |
| R = α4 Zhβ4Zdrγ4 | 10% (14%) | 13% (8%) | 3% (44%) | 7% (42%) | 6% (23%) |
| R = α5 Kdp | 5% (5%) | 5% (4%) | 6% (5%) | 10% (11%) | 6% (6%) |
| R = α6 Zdrβ6Kdpγ6 | 4% (4%) | 5% (1%) | 2% (5%) | 8% (5%) | 2% (2%) |
| ISAC-CNR TC—S-Band—SIFT Approach | |||||||
| α | β | γ | NMAE | NB | Corr | RMSE | |
| ah = α1 Kdp | 0.0134 | \ | \ | 26% | −22% | 0.988 | 0.0004 |
| ad = α2 Kdp | 0.0041 | \ | \ | 47% | 18% | 0.918 | 0.0003 |
| R = α3 Zhβ3 | 0.0224 | 0.6354 | \ | 15% | −2% | 0.983 | 1.05 |
| R = α4 Zhβ4Zdrγ4 | 0.0040 | 0.9461 | −3.5300 | 14% | −8% | 0.994 | 0.66 |
| R = α5 Kdp | 33.6200 | \ | \ | 37% | −33% | 0.980 | 1.45 |
| R = α6 Zdrβ6Kdpγ6 | 87.5898 | −1.8417 | 0.9580 | 8% | −4% | 0.998 | 0.33 |
| ISAC-CNR TC—C-Band—SIFT Approach | |||||||
| α | β | γ | NMAE | NB | corr | RMSE | |
| ah = α1 Kdp | 0.1154 | \ | \ | 29% | 20% | 0.983 | 0.0082 |
| ad = α2 Kdp | 0.0404 | \ | \ | 67% | 52% | 0.966 | 0.0043 |
| R = α3 Zhβ3 | 0.0510 | 0.5397 | \ | 25% | 2% | 0.937 | 1.99 |
| R = α4 Zhβ4Zdrγ4 | 0.0778 | 0.4705 | 0.5587 | 28% | 4% | 0.938 | 1.96 |
| R = α5 Kdp | 16.1810 | \ | \ | 37% | −33% | 0.981 | 1.41 |
| R = α6 Zdrβ6Kdpγ6 | 24.0739 | −0.3855 | 0.8383 | 8% | −4% | 0.997 | 0.45 |
| ISAC-CNR TC—X-Band—SIFT Approach | |||||||
| α | β | γ | NMAE | NB | corr | RMSE | |
| ah = α1 Kdp | 0.3454 | \ | \ | 15% | 12% | 0.997 | 0.0144 |
| ad = α2 Kdp | 0.0649 | \ | \ | 35% | 27% | 0.990 | 0.0054 |
| R = α3 Zhβ3 | 0.0342 | 0.5662 | \ | 18% | −3% | 0.976 | 1.22 |
| R = α4Zhβ4Zdrγ4 | 0.0089 | 0.8524 | −3.5254 | 18% | −6% | 0.985 | 0.97 |
| R = α5 Kdp | 11.3739 | \ | \ | 31% | −28% | 0.988 | 1.16 |
| R = α6 Zdrβ6Kdpγ6 | 23.4934 | −1.1082 | 0.9325 | 6% | −3% | 0.999 | 0.29 |
| ISAC-CNR TC—S-Band—SIFT Approach—Convective Rain | |||||||
| α | β | γ | NMAE | NB | Corr | RMSE | |
| ah = α1 Kdp | 0.0130 | \ | \ | 9% | −3% | 0.977 | 0.0013 |
| ad = α2 Kdp | 0.0042 | \ | \ | 31% | −1% | 0.842 | 0.0013 |
| R = α3 Zhβ3 | 0.0046 | 0.7688 | \ | 16% | 0% | 0.955 | 4.33 |
| R = α4 Zhβ4Zdrγ4 | 0.0012 | 1.0712 | −3.9424 | 5% | 0% | 0.993 | 1.41 |
| R = α5 Kdp | 31.779 | \ | \ | 12% | −5% | 0.982 | 3.14 |
| R = α6 Zdrβ6Kdpγ6 | 90.606 | −1.9383 | 1.0313 | 3% | 0% | 0.996 | 0.78 |
| ISAC-CNR TC—C-Band—SIFT Approach—Convective Rain | |||||||
| α | β | γ | NMAE | NB | Corr | RMSE | |
| ah = α1Kdp | 0.1180 | \ | \ | 16% | 6% | 0.976 | 0.0317 |
| ad = α2 Kdp | 0.0422 | \ | \ | 23% | 10% | 0.968 | 0.0151 |
| R = α3 Zhβ3 | 0.0223 | 0.6083 | \ | 30% | −1% | 0.824 | 8.47 |
| R = α4Zhβ4Zdrγ4 | 0.0163 | 0.6552 | −0.3297 | 29% | −1% | 0.825 | 8.44 |
| R = α5 Kdp | 15.2837 | \ | \ | 11% | −5% | 0.987 | 2.84 |
| R = α6 Zdrβ6Kdpγ6 | 23.3346 | −0.4995 | 0.9521 | 6% | 0% | 0.992 | 1.49 |
| ISAC-CNR TC—X-Band—SIFT Approach—Convective rain | |||||||
| α | β | γ | NMAE | NB | Corr | RMSE | |
| ah = α1 Kdp | 0.3526 | \ | \ | 4% | 2% | 0.995 | 0.0376 |
| ad = α2 Kdp | 0.0672 | \ | \ | 10% | 2% | 0.984 | 0.0169 |
| R = α3 Zhβ3 | 0.0058 | 0.7091 | \ | 18% | −1% | 0.943 | 4.90 |
| R = α4 Zhβ4Zdrγ4 | 0.0033 | 0.9806 | −4.4888 | 10% | 0% | 0.980 | 2.76 |
| R = α5 Kdp | 10.7913 | \ | \ | 8% | −4% | 0.990 | 2.24 |
| R = α6 Zdrβ6Kdpγ6 | 22.0551 | −1.1018 | 0.9754 | 3% | 0% | 0.995 | 1.00 |
| ISAC-CNR TC—S-Band—SIFT Approach—Stratiform Rain | |||||||
| α | β | γ | NMAE | NB | Corr | RMSE | |
| ah = α1 Kdp | 0.0201 | \ | \ | 21% | −15% | 0.982 | 0.0001 |
| ad = α2 Kdp | 0.0032 | \ | \ | 53% | 32% | 0.669 | 0.0001 |
| R = α3 Zhβ3 | 0.0246 | 0.6390 | \ | 15% | 2% | 0.968 | 0.48 |
| R = α4 Zhβ4Zdrγ4 | 0.0066 | 0.9678 | −5.6907 | 7% | −1% | 0.993 | 0.22 |
| R = α5 Kdp | 64.9792 | \ | \ | 20% | −16% | 0.982 | 0.45 |
| R = α6 Zdrβ6Kdpγ6 | 101.9187 | −2.3339 | 0.9420 | 6% | −2% | 0.997 | 0.14 |
| ISAC-CNR TC—C-Band—SIFT Approach—Stratiform Rain | |||||||
| α | β | γ | NMAE | NB | Corr | RMSE | |
| ah = α1 Kdp | 0.0729 | \ | \ | 14% | −4% | 0.978 | 0.0010 |
| ad = α2 Kdp | 0.0120 | \ | \ | 50% | 23% | 0.859 | 0.0005 |
| R = α3 Zhβ3 | 0.0867 | 0.4749 | \ | 31% | 10% | 0.913 | 0.80 |
| R = α4 Zhβ4Zdrγ4 | 0.0510 | 0.6257 | −2.7690 | 27% | 9% | 0.927 | 0.74 |
| R = α5 Kdp | 31.6234 | \ | \ | 20% | −15% | 0.987 | 0.40 |
| R = α6Zdrβ6Kdpγ6 | 30.9720 | −0.7932 | 0.8653 | 8% | −2% | 0.994 | 0.21 |
| ISAC-CNR TC—X-Band—SIFT Approach—Stratiform Rain | |||||||
| α | β | γ | NMAE | NB | Corr | RMSE | |
| ah = α1 Kdp | 0.2615 | \ | \ | 7% | 1% | 0.995 | 0.0026 |
| ad = α2 Kdp | 0.0365 | \ | \ | 26% | 15% | 0.953 | 0.0013 |
| R = α3 Zhβ3 | 0.0461 | 0.5480 | \ | 21% | 4% | 0.948 | 0.61 |
| R = α4 Zhβ4Zdrγ4 | 0.0128 | 0.8740 | −4.8960 | 13% | 1% | 0.971 | 0.45 |
| R = α5 Kdp | 19.1441 | \ | \ | 18% | −13% | 0.992 | 0.33 |
| R = α6Zdrβ6Kdpγ6 | 23.6538 | −1.0178 | 0.9194 | 7% | −2% | 0.997 | 0.15 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adirosi, E.; Roberto, N.; Montopoli, M.; Gorgucci, E.; Baldini, L. Influence of Disdrometer Type on Weather Radar Algorithms from Measured DSD: Application to Italian Climatology. Atmosphere 2018, 9, 360. https://doi.org/10.3390/atmos9090360
Adirosi E, Roberto N, Montopoli M, Gorgucci E, Baldini L. Influence of Disdrometer Type on Weather Radar Algorithms from Measured DSD: Application to Italian Climatology. Atmosphere. 2018; 9(9):360. https://doi.org/10.3390/atmos9090360
Chicago/Turabian StyleAdirosi, Elisa, Nicoletta Roberto, Mario Montopoli, Eugenio Gorgucci, and Luca Baldini. 2018. "Influence of Disdrometer Type on Weather Radar Algorithms from Measured DSD: Application to Italian Climatology" Atmosphere 9, no. 9: 360. https://doi.org/10.3390/atmos9090360
APA StyleAdirosi, E., Roberto, N., Montopoli, M., Gorgucci, E., & Baldini, L. (2018). Influence of Disdrometer Type on Weather Radar Algorithms from Measured DSD: Application to Italian Climatology. Atmosphere, 9(9), 360. https://doi.org/10.3390/atmos9090360