
The Comprehensive Vertical Ozone Observation Experiment and Result Analysis of Ozone Lidars in China


 ,
,
Abstract
1. Introduction
2. Experiment and Data
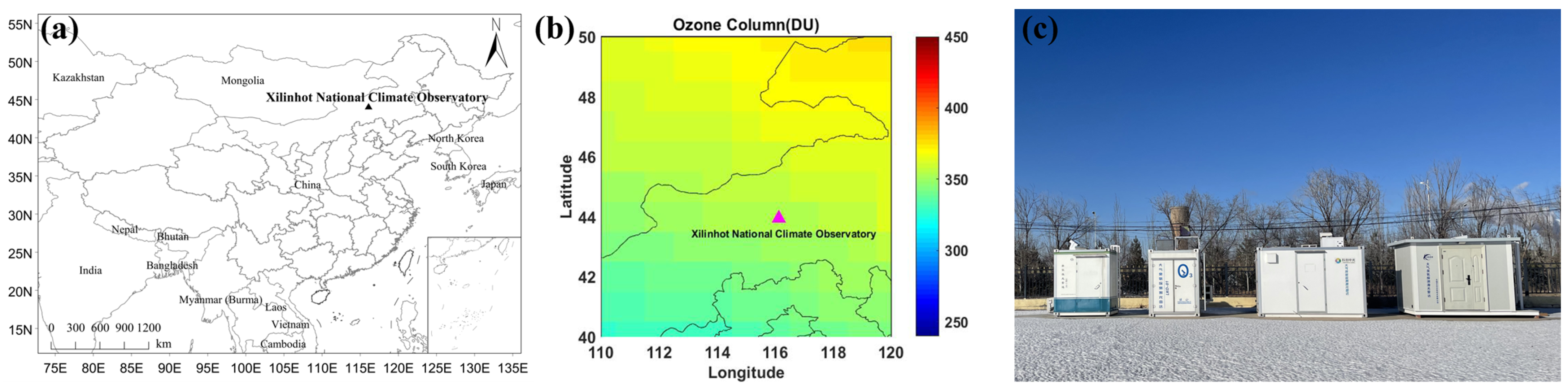
2.1. Experimental Site
2.2. Instruments and Methods
2.2.1. Ozone Lidar
2.2.2. Ozone Radiosonde
2.2.3. Other Observations
2.3. Data and Methods
3. Results
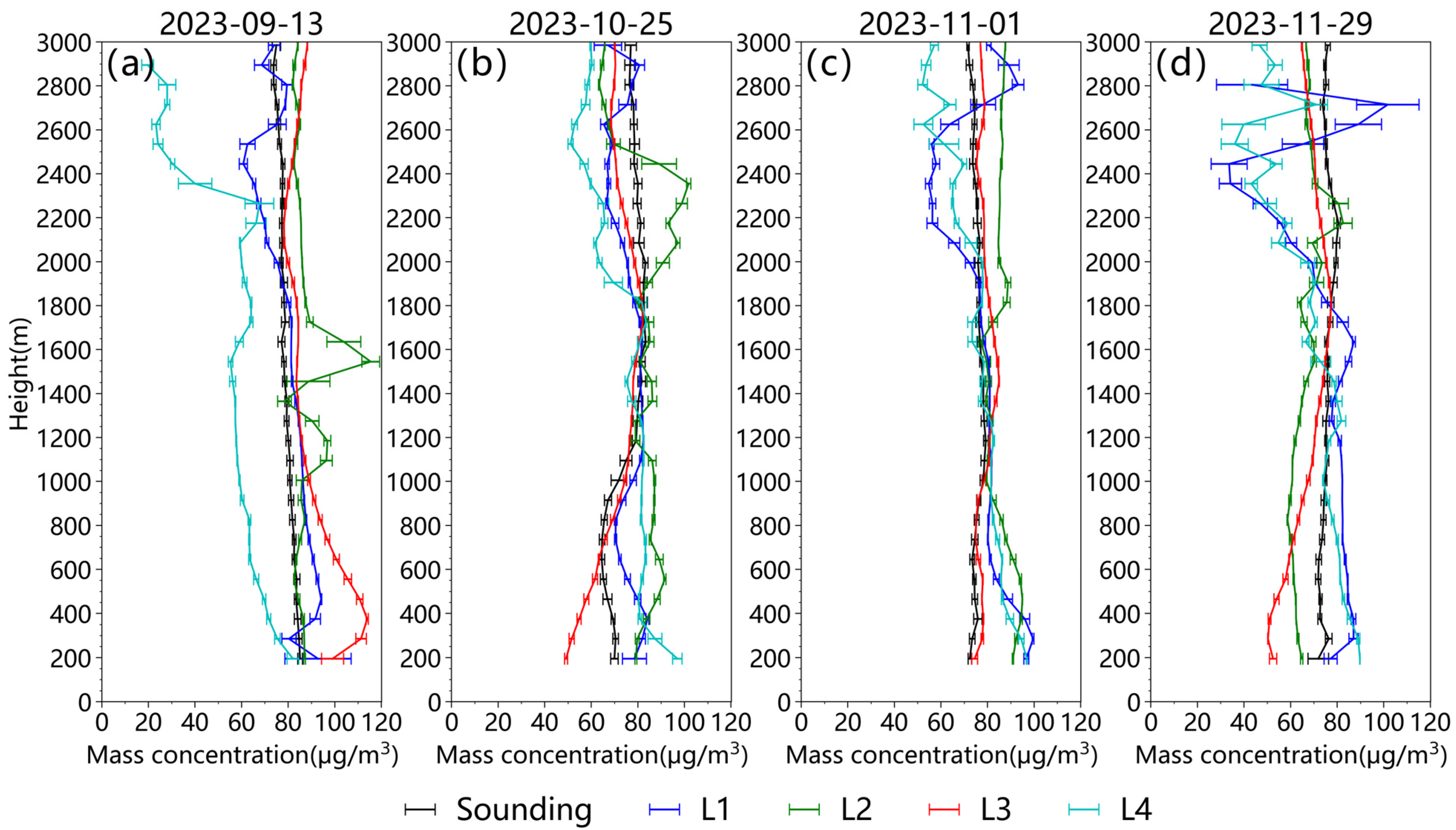
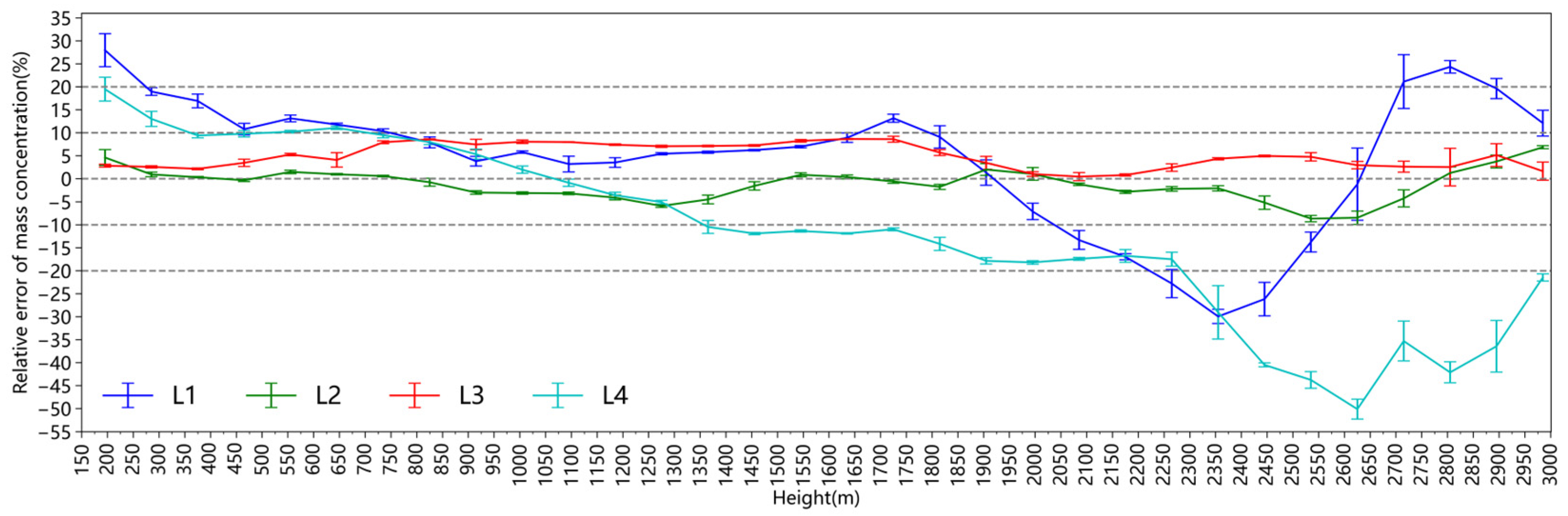
3.1. Comparison between Ozone Lidar and Radiosonde
3.2. Comparison of Near-Surface Ozone Concentrations between Ozone Lidar and Ozone Analyzer
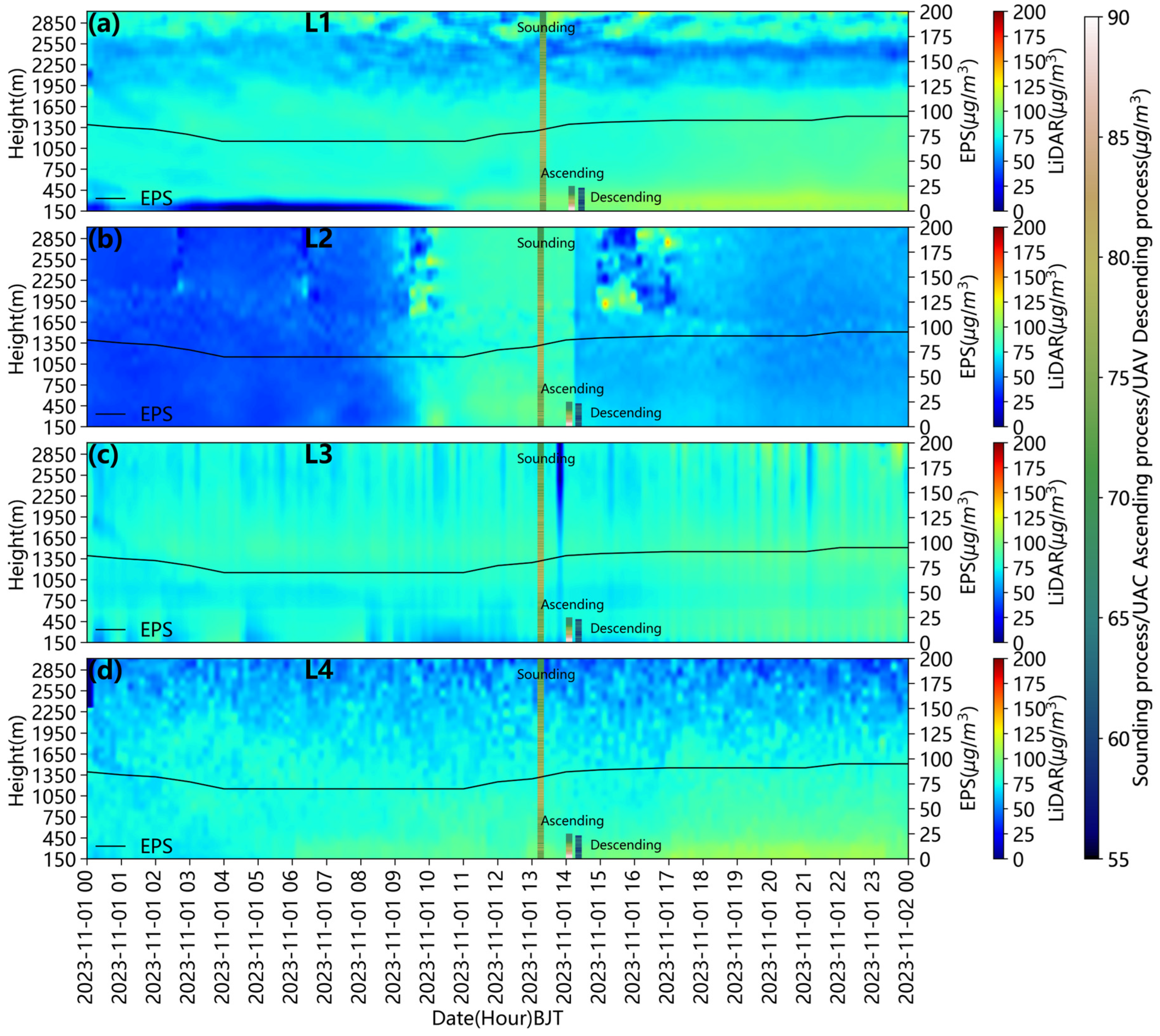
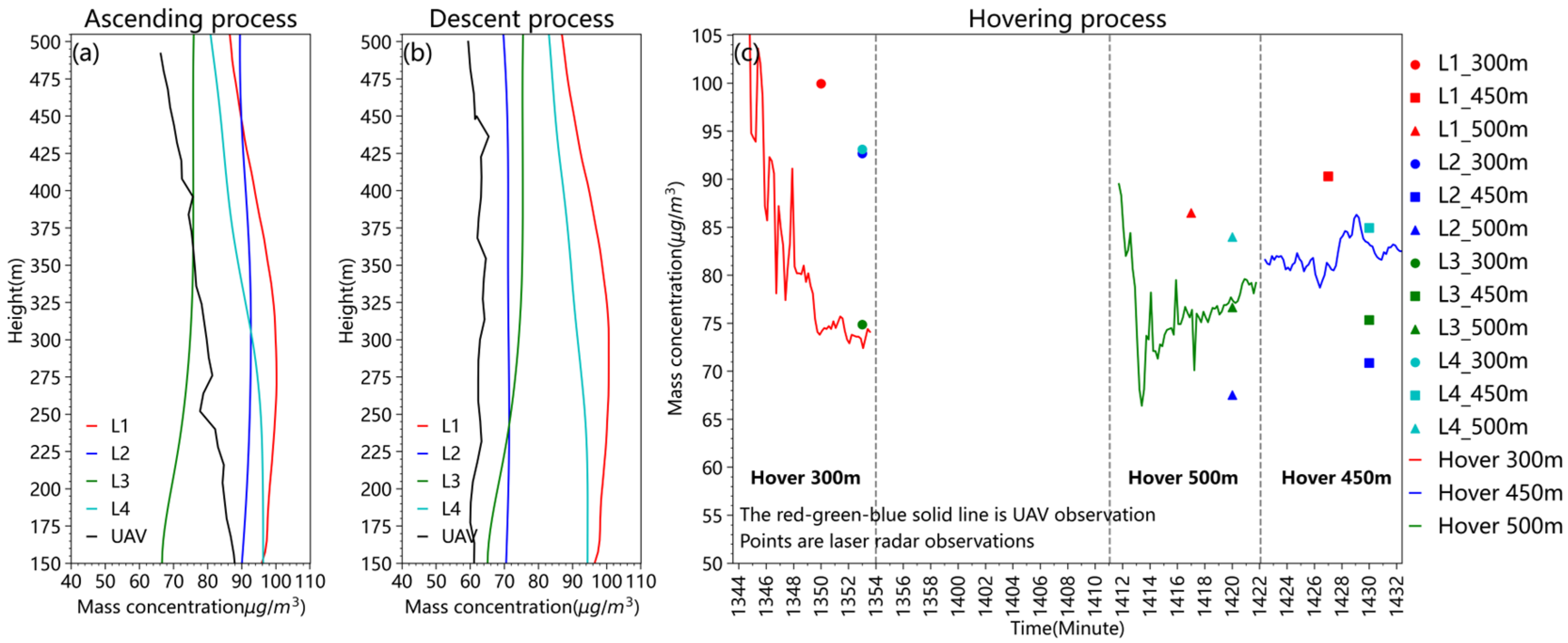
3.3. Comparison of Ozone Lidar with UAV Measurements
3.4. Influence Analysis of Precipitation Events on Ozone Lidar Inversion
4. Conclusions and Discussion
- (1)
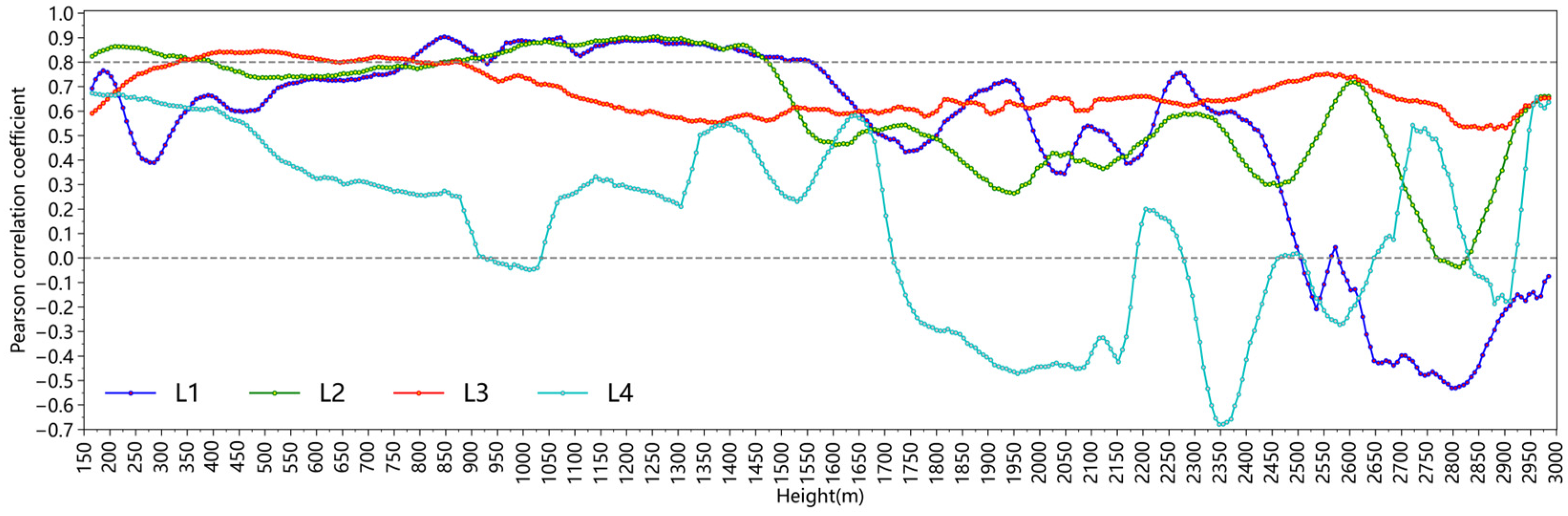
- The ozone profiles of four models of ozone lidar were systematically compared with 17 ozone radiosonde observations. Ozone lidars have a better behavior between 400 m and 2000 m, with the deviation within 10% and the correlation coefficient mainly around 0.6~0.9 for most models of ozone lidars. The detection performances of most ozone lidars gradually decreased as the altitude increased above 2000 m. The correlation coefficients for most models of lidar dropped below 0.5.
- (2)
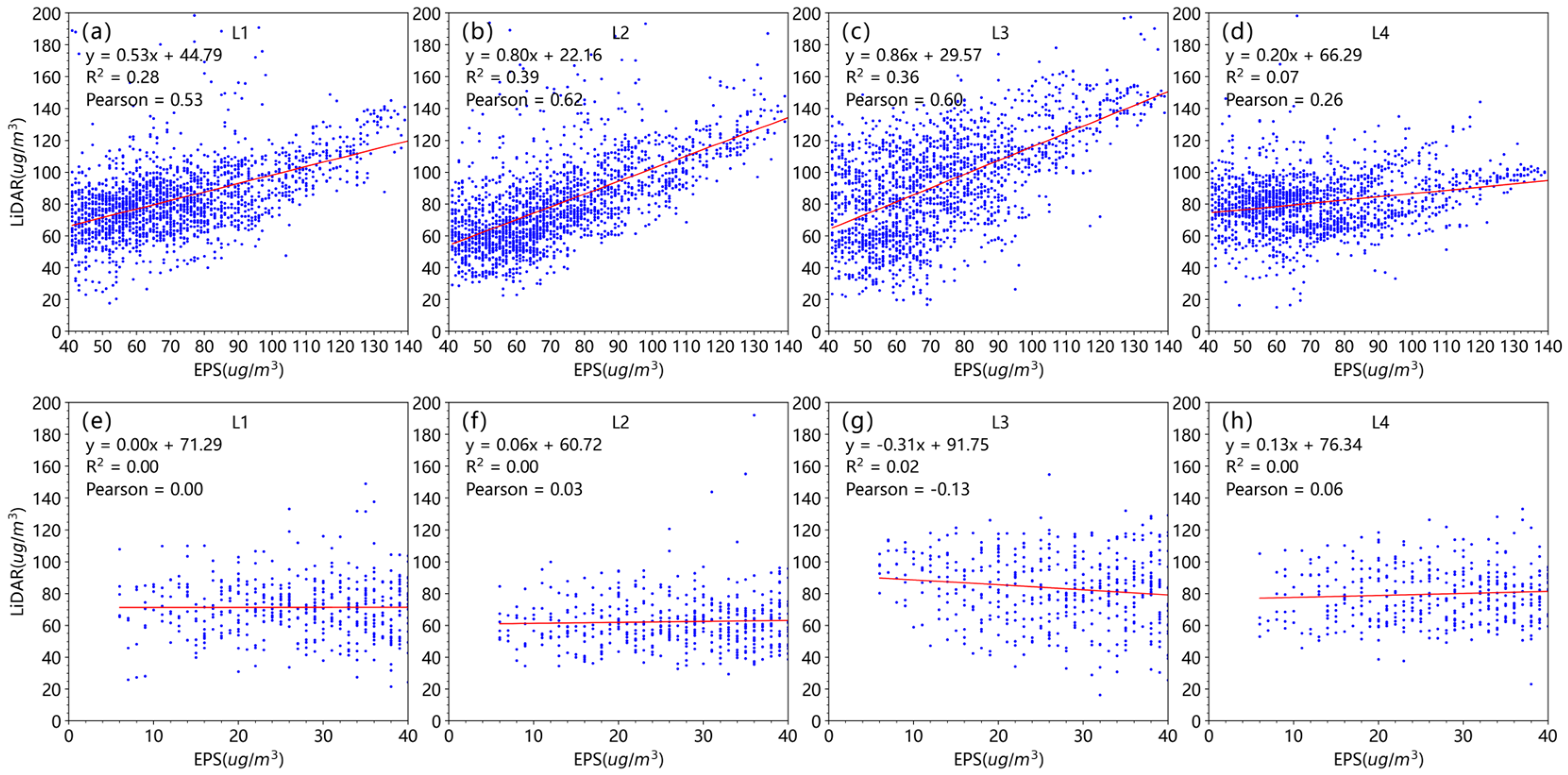
- The ozone lidar demonstrates trustworthy accuracy in surface ozone detection. The ozone mass concentrations observed using ozone lidars at a height of 300 m agreed well with ground-based ozone analyzer measurements at nearby environmental protection stations, especially during periods with ozone concentrations higher than 40 µg·m−3. The correlation coefficients for most models of ozone lidar were higher than 0.53. Lidars tend to overestimate ozone concentrations beneath the boundary layer, especially when the actual ozone concentration is below 40 µg·m−3, due to the interference of background signal noise and aerosol scattering.
- (3)
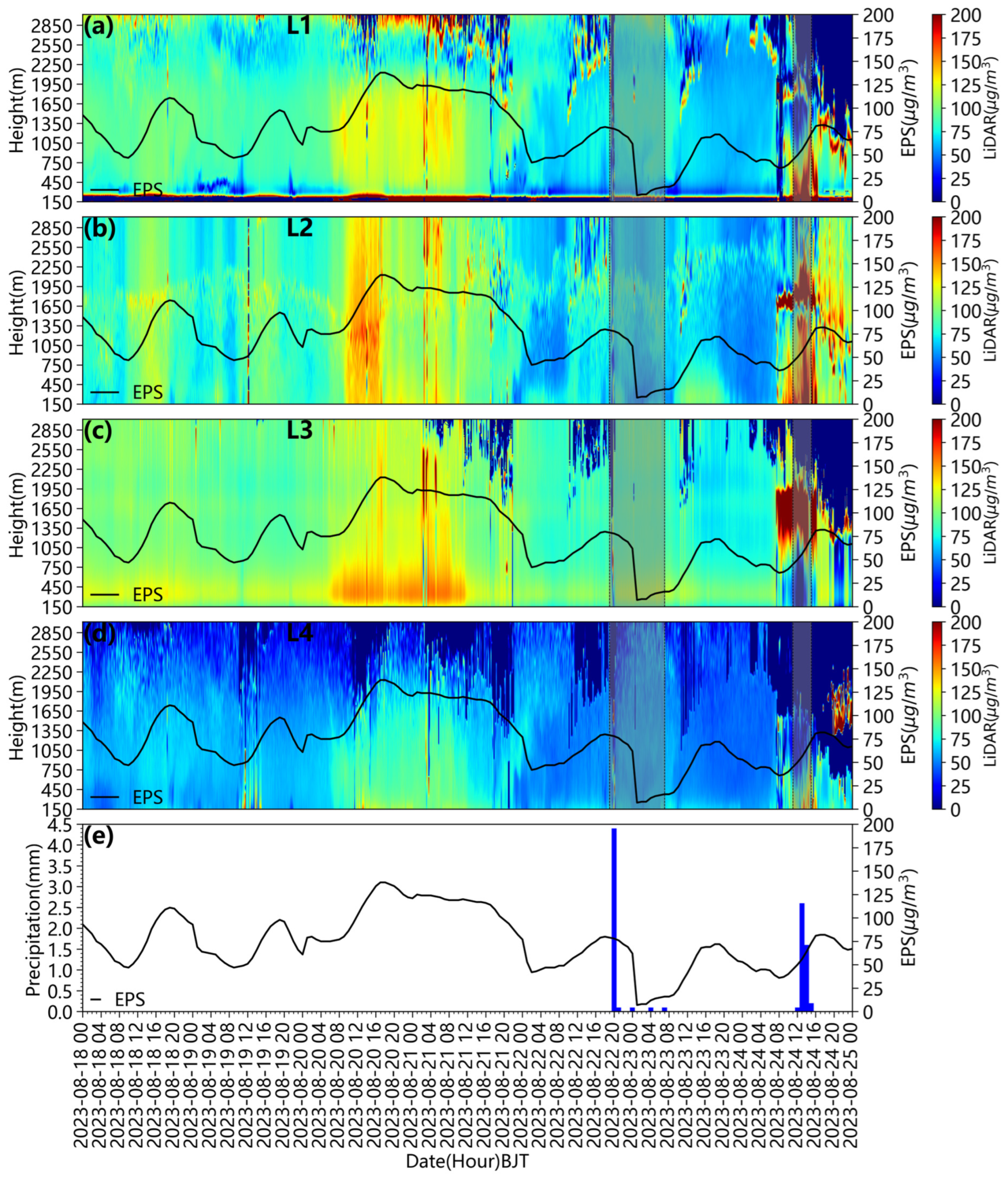
- The ozone lidar exhibits good vertical detection performance under clear weather. However, the investigations of the influence of different types of precipitation events on ozone lidar measurement further indicate that thick cloud layers, low cloud base, and an intensive precipitation event with large raindrop particles can result in high value anomalies and reduce the inversion accuracy of ozone lidar. Additionally, most ozone lidars have not been equipped with automatic cleaning devices for their optical windows, and the remaining water or raindrops on the optical window after a precipitation event can severely affect the emission and reception of the lidar laser signals, affecting the accuracy of the retrievals as well.
- (4)
- The differences between ozone lidars, ozone radiosonde, surface ozone measurement and UAV lie in several aspects. First, the ozone lidar is based on a differential absorption principle, the ozone radiosonde applies an electrochemical principle, and the surface measurement and that loaded on the UAV make use of UV absorption spectrophotometry, resulting in different accuracies and response times, etc. Second, the ozone lidars’ detection location is fixed, while the ozone radiosonde drifts to a certain extent from the release point according to the wind speed. The difference in real-time observation orientation among the different techniques results in the deviation of observed concentration values. Third, along with the increase in the height, the measurement accuracy of lidar is greatly affected by the signal-to-noise ratio, leading to more observation errors.
- (5)
- To address these affecting factors, it is recommended that ozone lidar manufacturers should put more emphasis on improving retrieval algorithms to eliminate the overestimation of near-surface ozone concentrations, to reduce the influence of clouds and precipitation, and to equip the lidar with automatic intelligent cleaning or drying devices for the equipment’s optics windows, etc. It is also worth trying to develop comprehensive quality control algorithms, combining other ground-based meteorological observations, millimeter-wave cloud radars and All-sky Imagers for weather phenomenon identification.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Archibald, A.T.; Neu, J.L.; Elshorbany, Y.F.; Cooper, O.R.; Young, P.J.; Akiyoshi, H.; Cox, R.A.; Coyle, M.; Derwent, R.G. Tropospheric Ozone Assessment Report: A critical review of changes in the tropospheric ozone burden and budget from 1850 to 2100. Elem. Sci. Anth. 2020, 8, 34. [Google Scholar] [CrossRef]
- Kong, Q.; Liu, G.; Li, G. Surface Ozone Concentration Variation andPossible Influences on Human Health. Clim. Environ. Res. 1999, 1, 61–66. (In Chinese) [Google Scholar]
- Ye, S.; Deng, R.; Ling, X. Advances on impacts of increasing ozone concentration in atmosphere near ground on yields of crops. J. Agro-Environ. Sci. 2006, S2, 772–776. (In Chinese) [Google Scholar]
- Chen, C.; Hong, Y.; Liu, L.; Tan, H.; Wu, M.; Situ, S.; Bu, Q.; Cheng, Y.; Zhou, Y. Analysis of two typical ozone pollution processes in Foshan in spring. Acta Sci. Circumstantiae 2022, 42, 304–314. (In Chinese) [Google Scholar]
- Yang, Y.; Hao, J.; Yang, L.; Wang, S.; Zhang, J. Analysis of meteorological conditions of a continuous ozone pollution process in Xingtai of Hebei province. J. Arid. Meteorol. 2020, 38, 448–456. (In Chinese) [Google Scholar]
- Wild, O.; Prather, M.J.; Akimoto, H.; Sundet, J.K.; Isaksen, I.S.; Crawford, J.H.; Davis, D.D.; Avery, M.A.; Kondo, Y.; Sachse, G.W.; et al. Chemical transport model ozone simulations for spring 2001 over the western Pacific: Regional ozone production and its global impacts. J. Geophys. Res. Atmos. 2003, 108, D21. [Google Scholar] [CrossRef]
- Wang, H.J.R.; Damadeo, R.; Flittner, D.; Kramarova, N.; Taha, G.; Davis, S.; Thompson, A.M.; Strahan, S.; Wang, Y.; Froidevaux, L.; et al. Validation of SAGE III/ISS Solar Ozone Data with Correlative Satellite and Ground Based Measurements. J. Geophys. Res. Atmos. 2022, 125, e2020JD032430. [Google Scholar] [CrossRef]
- Shi, G.; Xu, L.; Guo, J.; Zhang, B.; Sun, B. Balloon Observation of Atmospheric Ozone and Aerosols. Sci. Atmos. Sin. 1996, 4, 401–407. (In Chinese) [Google Scholar]
- McPeters, R.D.; Labow, G.J.; Johnson, B.J. A satellite-derived ozone climatology for balloonsonde estimation of total column ozone. J. Geophys. Res. Atmos. 1997, 102, 8875–8885. [Google Scholar] [CrossRef]
- Naja, M.; Akimoto, H. Contribution of regional pollution and long-range transport to the Asia-Pacific region: Analysis of long-term ozonesonde data over Japan. J. Geophys. Res. Atmos. 2004, 109, D21. [Google Scholar] [CrossRef]
- Zhang, J.; Xuan, Y.; Liu, M.; Wan, X.; Bai, Z. Atmospheric Ozonesonde: Technical Specifi cations and Comparisons. Adv. Meteorol. Sci. Technol. 2015, 5, 35–44. (In Chinese) [Google Scholar]
- Schnadt Poberaj, C.; Staehelin, J.; Brunner, D.; Thouret, V.; De Backer, H.; Stübi, R. Long-term changes in UT/LS ozone between the late 1970s and the 1990s deduced from the GASP and MOZAIC aircraft programs and from ozonesondes. Atmos. Chem. Phys. 2009, 9, 5343–5369. [Google Scholar] [CrossRef]
- Sheng, Z.; Che, H.; Chen, Q.; Liu, D.; Wang, Z.; Zhao, H.; Gui, K.; Zheng, Y.; Sun, T.; Li, X.; et al. Aerosol vertical distribution and optical properties of different pollution events in Beijing in autumn 2017. Atmos. Res. 2019, 215, 193–207. [Google Scholar] [CrossRef]
- Fan, G.; Liu, J.; Chen, Z.; Liu, W.; Lu, Y.; Zhang, T.; Dong, Y. A differential absorption lidar system for tropospheric ozone monitoring. Chin. J. Lasers 2012, 39, 1113001. [Google Scholar]
- Cao, K.; Huang, J.; Hu, S. Boundary layer ozone differential-absorption lidar. Infrared Laser Eng. 2015, 44, 2912–2917. (In Chinese) [Google Scholar]
- Keppens, A.; Di Pede, S.; Hubert, D.; Lambert, J.-C.; Veefkind, P.; Sneep, M.; De Haan, J.; Linden, M.T.; Leblanc, T.; Compernolle, S.; et al. Five years of Sentinel-5p TROPOMI operational ozone profiling and geophysical validation using ozonesonde and lidar ground-based networks. Atmos. Meas. Tech. Discuss. 2024, 1–43. [Google Scholar] [CrossRef]
- Wing, R.; Godin-Beekmann, S.; Steinbrecht, W.; McGee, T.J.; Sullivan, J.T.; Khaykin, S.; Sumnicht, G.; Twigg, L. Evaluation of the new DWD ozone and temperature lidar during the Hohenpeißenberg Ozone Profiling Study (HOPS) and comparison of results with previous NDACC campaigns. Atmos. Meas. Tech. 2021, 14, 3773–3794. [Google Scholar] [CrossRef]
- Hu, S.; Hu, H.; Zhou, J.; Wu, Y. DIAL lidar measurement for tropospheric ozone. Laser Technol. 2001, 25, 406–409. (In Chinese) [Google Scholar]
- Di, H.; Li, X.; Hua, D.; Li, S. Research status and progress of lidar for atmosphere in China. Microw. Opt. Technol. Lett. 2021, 63, 2129–2134. [Google Scholar]
- Dolgii, S.I.; Nevzorov, A.A.; Nevzorov, A.V.; Romanovskii, O.A.; Kharchenko, O.V. Comparison of ozone vertical profiles in the upper troposphere-stratosphere measured over Tomsk, Russia (56.5° N, 85.0° E) with DIAL, MLS, and IASI. Int. J. Remote Sens. 2020, 41, 8590–8609. [Google Scholar] [CrossRef]
- Huang, Z.; Pei, C.; Wang, Y.; Chen, Y.; Liang, Y.; Zhang, T.; Fan, G.; Wan, X.; Hu, T.; Li, Z.; et al. The Networking Observation and Analysis of Atmospheric Ozone Lidars in Guangzhou in 2017. Environ. Sci. Technol. 2018, 41, 159–164. (In Chinese) [Google Scholar]
- Leblanc, T.; Brewer, M.A.; Wang, P.S.; Granados-Muñoz, M.J.; Strawbridge, K.B.; Travis, M.; Firanski, B.; Sullivan, J.T.; McGee, T.J.; Sumnicht, G.K.; et al. Validation of the TOLNet lidars: The southern California ozone observation project (scoop). Atmos. Meas. Tech. 2018, 11, 6137–6162. [Google Scholar] [CrossRef]
- Ancellet, G.; Godin-Beekmann, S.; Smit, H.G.J.; Stauffer, R.M.; Van Malderen, R.; Bodichon, R.; Pazmiño, A. Homogenization of the Observatoire de Haute Provence electrochemical concentration cell (ECC) ozonesonde data record: Comparison with lidar and satellite observations. Atmos. Meas. Tech. 2022, 15, 3105–3120. [Google Scholar] [CrossRef]
- Geng, F.; Tie, X.; Xu, J.; Zhou, G.; Peng, L.; Gao, W.; Tang, X.; Zhao, C. Characterizations of ozone, NOx, and VOCs measured in Shanghai, China. Atmos. Environ. 2008, 42, 6873–6883. [Google Scholar] [CrossRef]
- Fu, Y.; Hong, L. Simulation of the interannual variations of biogenic emissions of volatile organic compounds in China: Impacts on tropospheric ozone and secondary organic aerosol. Atmos. Environ. 2012, 59, 170–185. [Google Scholar] [CrossRef]
- Zhao, W.; Gao, B.; Liu, M.; Lu, Q.; Ma, S.; Sun, J.; Chen, L.; Fan, S. Impact of Meteorological Factors on the Ozone Pollution in Hong Kong. Environ. Sci. 2019, 40, 55–66. (In Chinese) [Google Scholar]
- Yan, X.; Gou, X.; Yang, J.; Zhao, W.; Xu, Q.; Liu, Y. The Variety of Ozone and its Relationship with Meteorological Conditions in Typical Cities in China. Plateau Meteorol. 2020, 39, 416–430. (In Chinese) [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ozone Lidar Number | Telescope (mm) | Laser | Detection Blind Zone (m) | Detection Height (km) | Spatial Resolution (m) | Temporal Resolution (min) | |||
|---|---|---|---|---|---|---|---|---|---|
| Laser Pulse (nm) | Single Pulse Energy (mJ) | Frequency (Hz) | Divergence Angle (urad) | ||||||
| L1 | 200 | 280/295 | ≥0.02 | 5000 | <300 | ≤45 | ≥3 | 7.5 | 10 |
| L2 | 300 | 266/289/316 | ≥100 | 10 | <300 | ≤75 | 5 | 7.5 | 10 |
| L3 | 300 | 289/316/532 | ≥100 | ≥10 | <500 | ≤100 | ≥3 | 7.5 | 10 |
| L4 | 200 | 280/295/560/590 | ≥0.2 | 100 | <1000 | <75 | ≥3 | 7.5 | 10 |
| Ozone Lidar Model | Relative Deviation (%) | ||||
|---|---|---|---|---|---|
| Ascending Process | Descending Process | Hovering 300 m | Hovering 450 m | Hovering 500 m | |
| L1 | 9.0~28.6% | 39.6~61.7% | 35.0% | 11.3% | 13.6% |
| L2 | 0~35.1% | 8.4~18.1% | 27.3% | 14.9% | 12.9% |
| L3 | 0~24.3% | 6.4~27.1% | 2.7% | 9.5% | 1.1% |
| L4 | 9.5~22.7% | 30.5~56.8% | 27.8% | 2.0% | 8.4% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, H.; Jin, J.; Lv, S.; Song, X.; Wang, N.; Long, G.; Shi, W.; Qin, Z.; Wu, K. The Comprehensive Vertical Ozone Observation Experiment and Result Analysis of Ozone Lidars in China. Atmosphere 2024, 15, 690. https://doi.org/10.3390/atmos15060690
Cai H, Jin J, Lv S, Song X, Wang N, Long G, Shi W, Qin Z, Wu K. The Comprehensive Vertical Ozone Observation Experiment and Result Analysis of Ozone Lidars in China. Atmosphere. 2024; 15(6):690. https://doi.org/10.3390/atmos15060690
Chicago/Turabian StyleCai, Haiyang, Junli Jin, Shanshan Lv, Xiaorui Song, Ningzhang Wang, Guicai Long, Wen Shi, Zhengxin Qin, and Kui Wu. 2024. "The Comprehensive Vertical Ozone Observation Experiment and Result Analysis of Ozone Lidars in China" Atmosphere 15, no. 6: 690. https://doi.org/10.3390/atmos15060690
APA StyleCai, H., Jin, J., Lv, S., Song, X., Wang, N., Long, G., Shi, W., Qin, Z., & Wu, K. (2024). The Comprehensive Vertical Ozone Observation Experiment and Result Analysis of Ozone Lidars in China. Atmosphere, 15(6), 690. https://doi.org/10.3390/atmos15060690