


Velocity Fluctuations Spectra in Experimental Data on Rayleigh–Taylor Mixing



Abstract
1. Introduction
2. Methodology and Foundations
2.1. Theory
2.1.1. Group Theory Methodology
2.1.2. Scaling Laws and Sensitivity to Deterministic Conditions
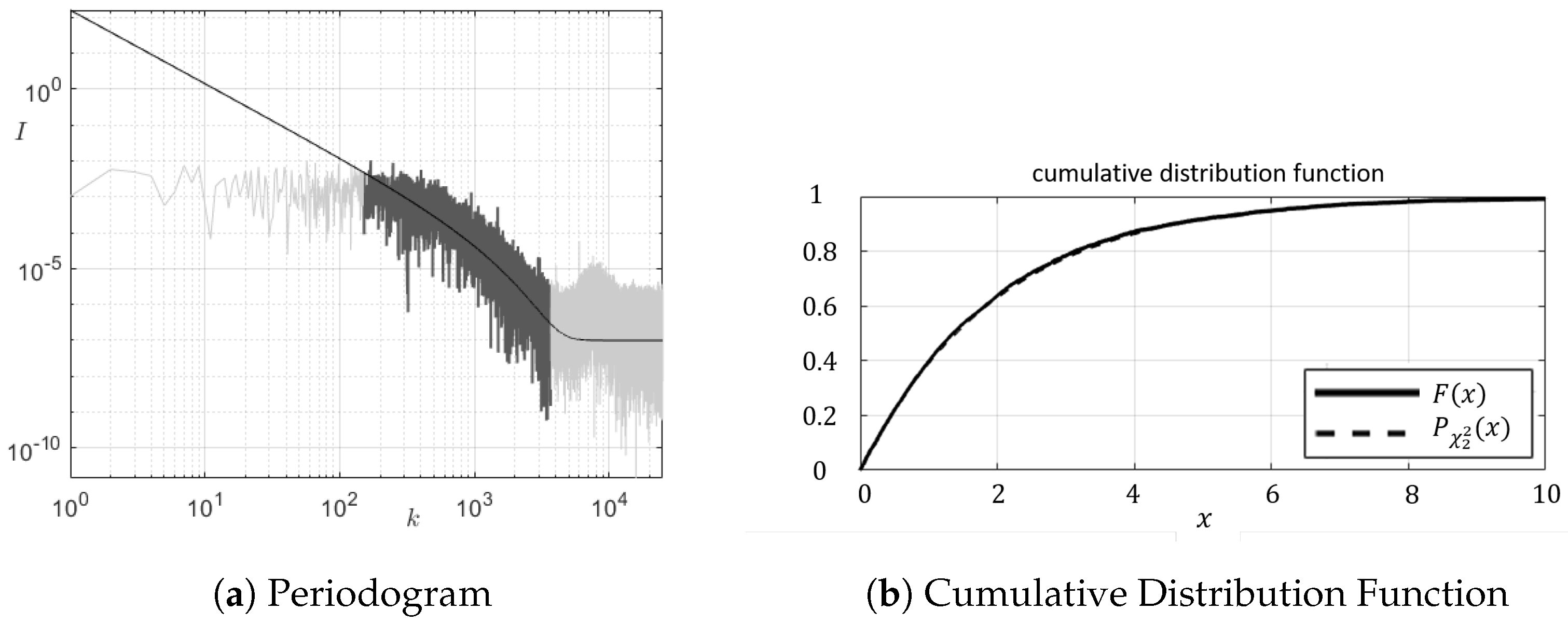
2.1.3. Fluctuations Spectra
2.1.4. Spectral Shapes in Experiments
2.2. Outline of Experiments
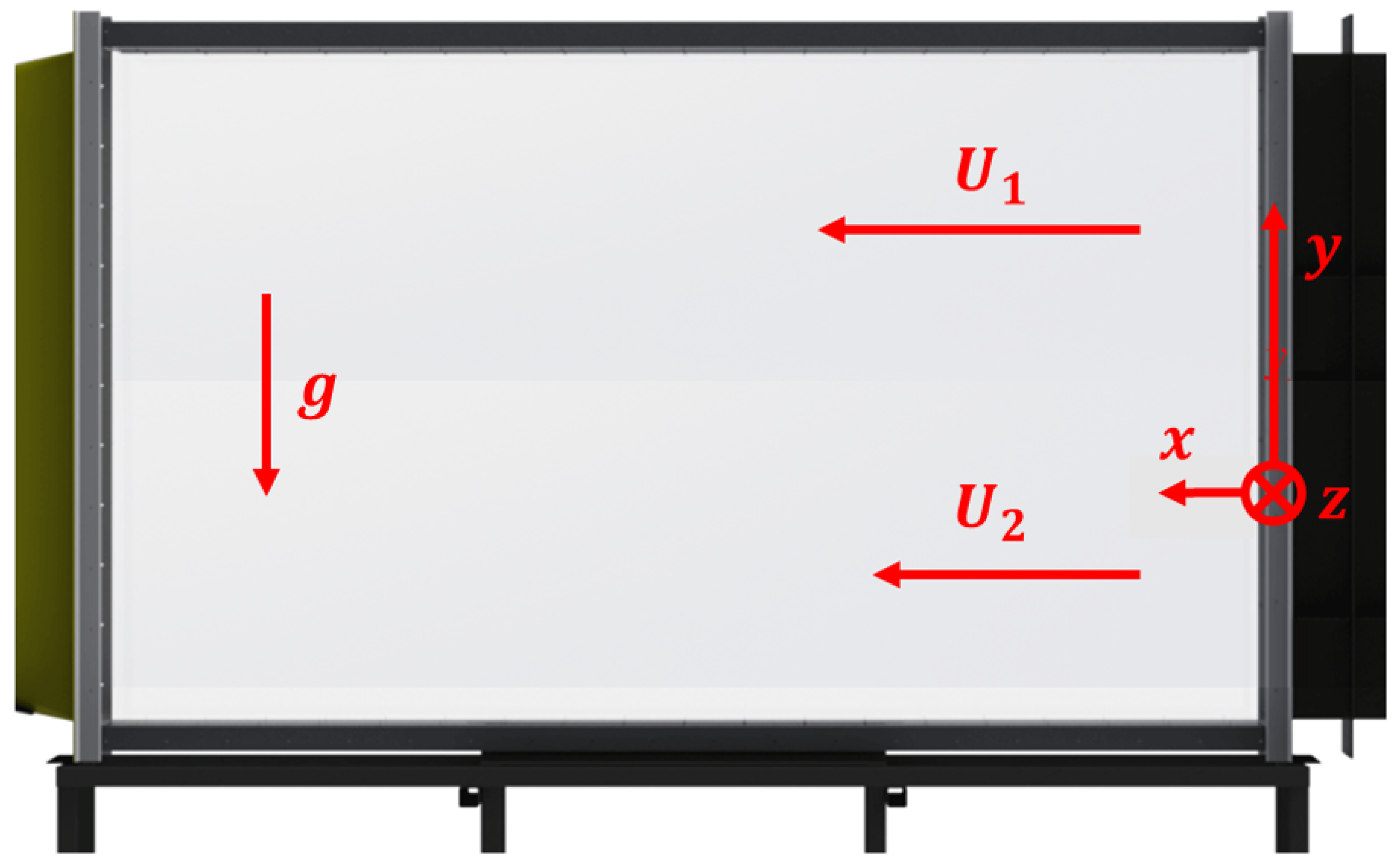
2.2.1. Experimental Setup
2.2.2. Characteristic Scales in the Experiments
2.3. Method of Data Analysis
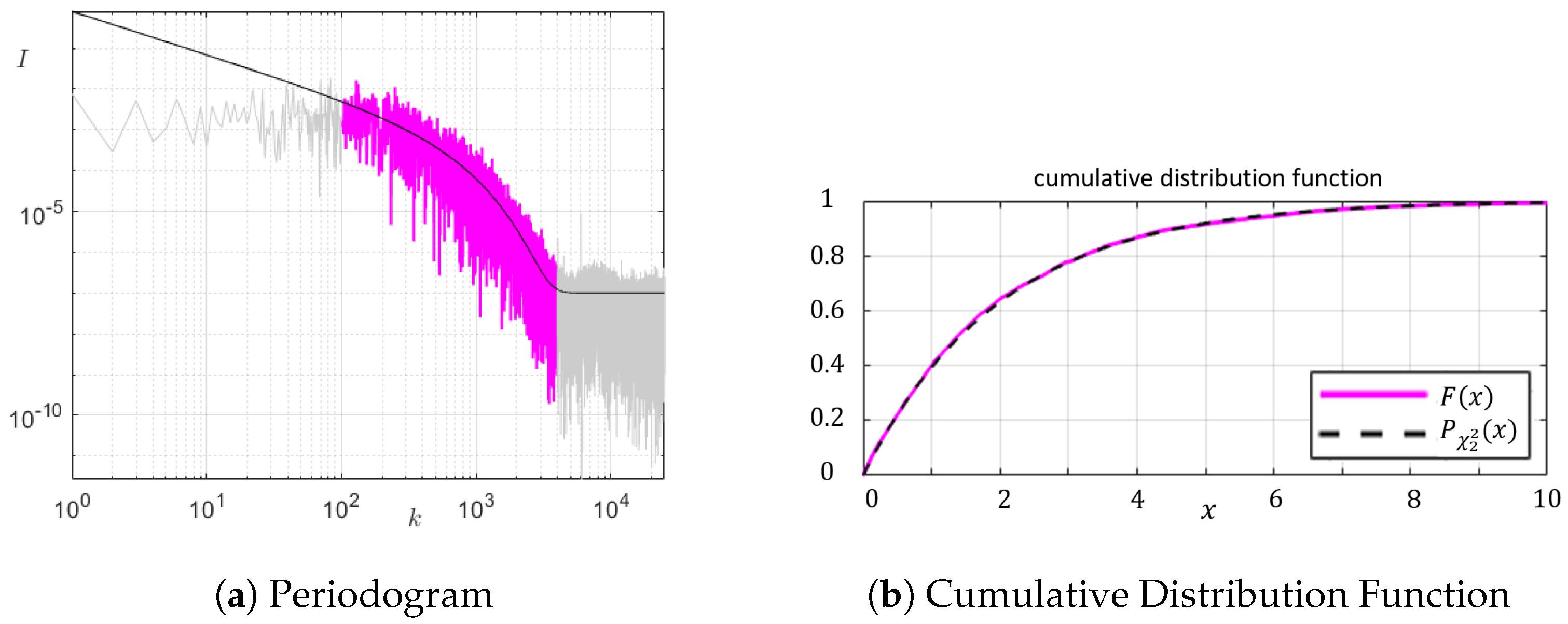
2.3.1. Spectrum Fitting Method
2.3.2. Effect of the Fitting Interval
3. Data Analysis Results
3.1. Stream-Wise Velocity
3.1.1. Spectral Properties of the Data
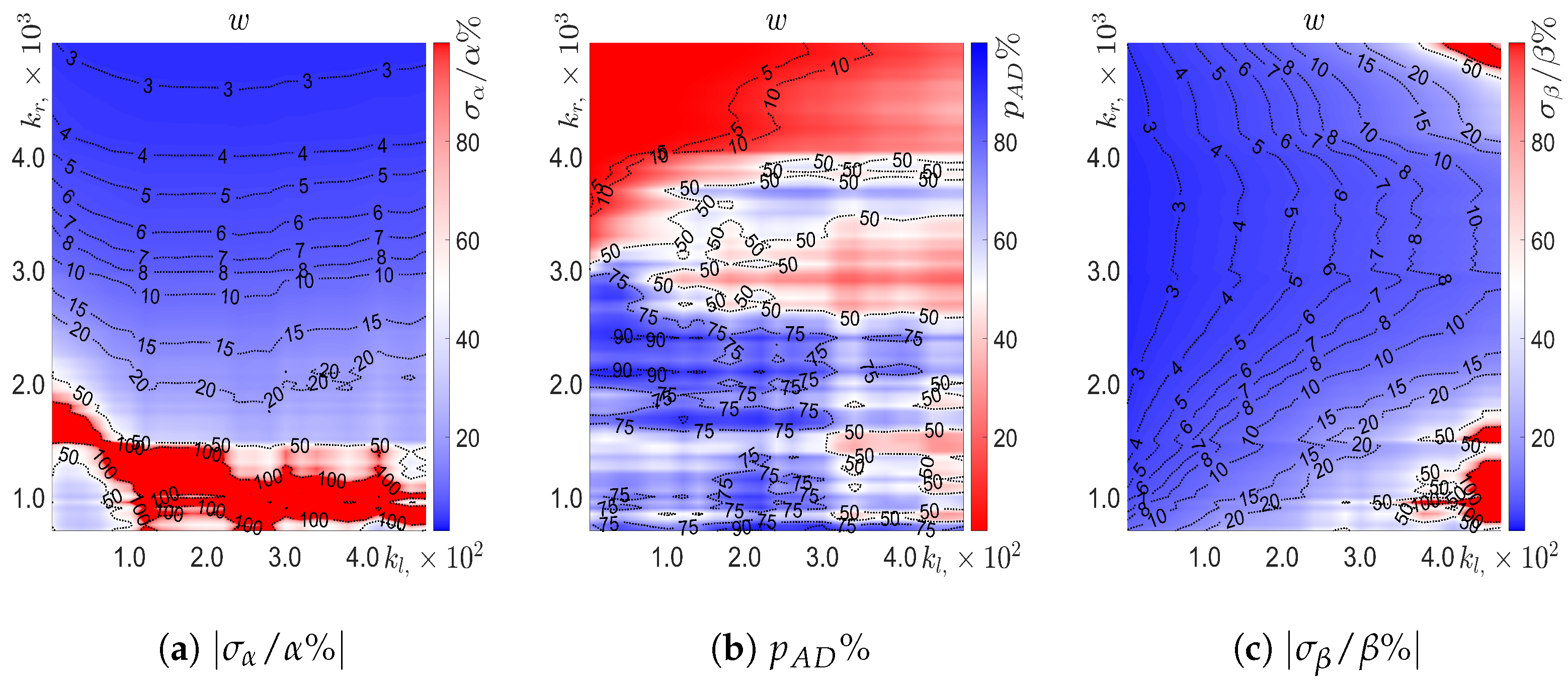
3.1.2. Analysis of Residuals and Goodness of Fit
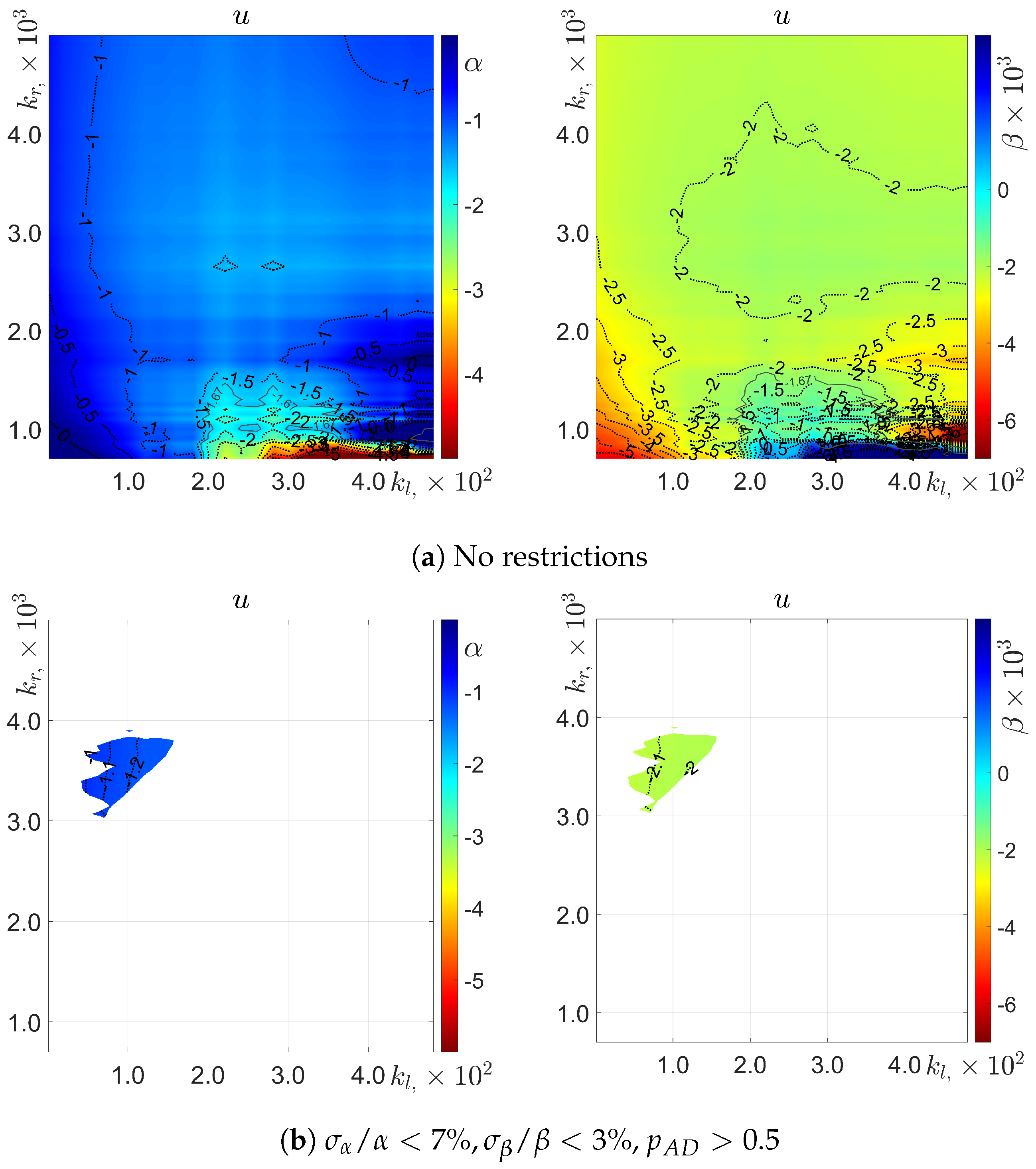
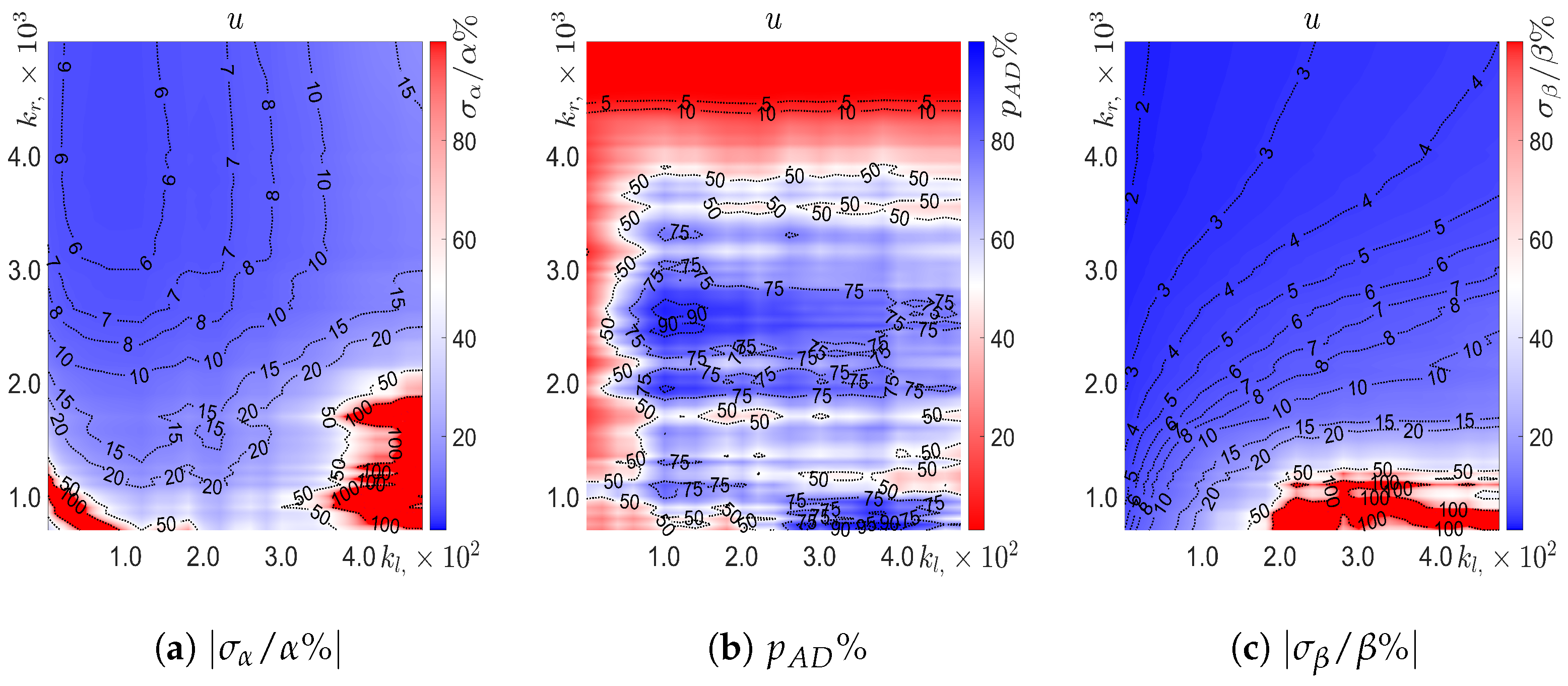
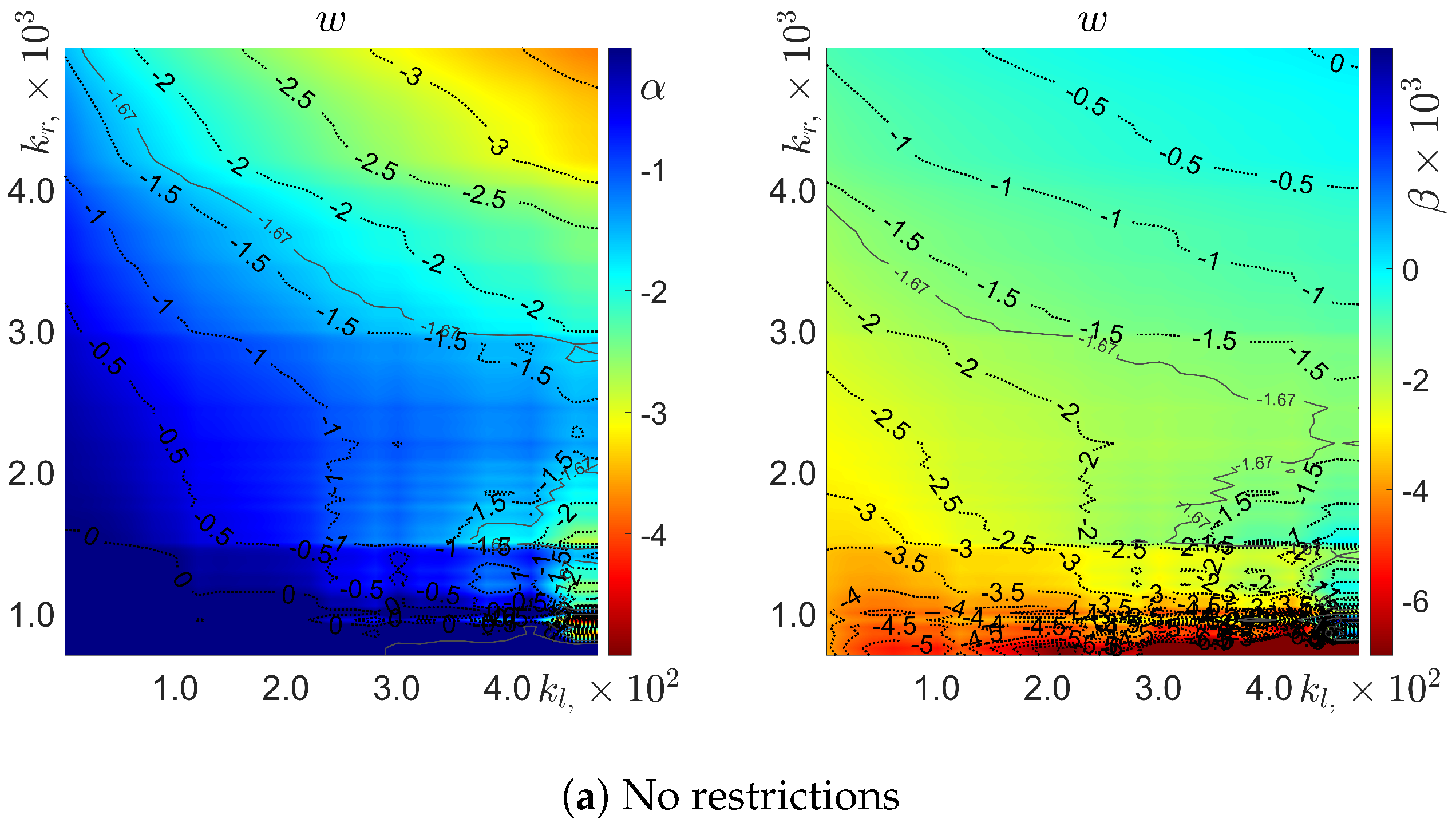
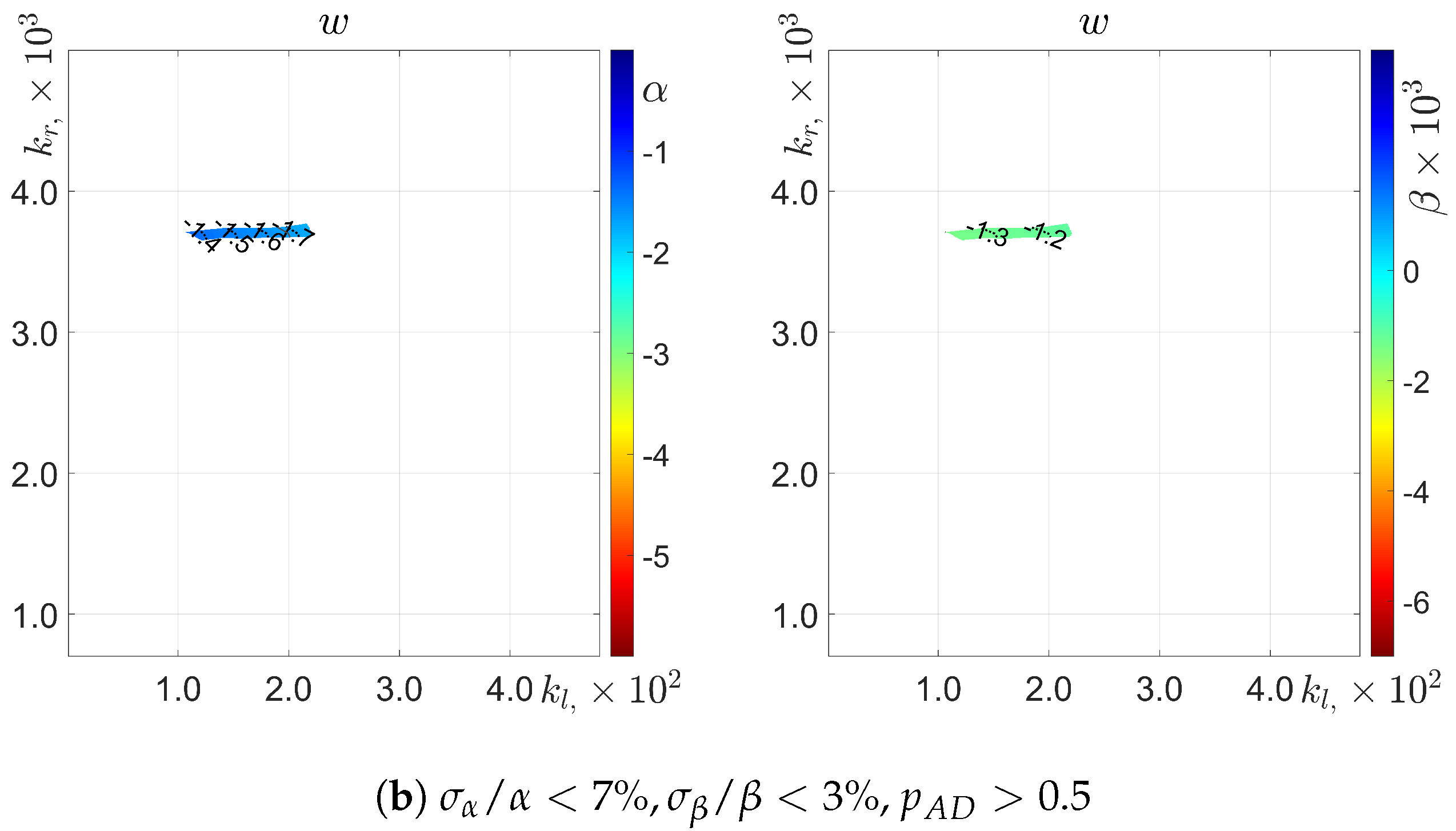
3.1.3. Effect of the Left and Right Cut-Off
3.2. Cross-Tank Velocities
3.2.1. Spectral Properties of the Data
3.2.2. Analysis of Residuals and Goodness of Fit
3.2.3. Effect of the Left and Right Cut-Offs
3.3. Cross-Stream Velocity
4. RT Mixing Characteristics in the Experiments
4.1. Flow Characteristics
4.2. Anomalous Scaling
4.3. Dynamic Anisotropy
4.4. Dynamic Bias
4.5. Analysis Method and Data Interpretation
4.6. Summary of Properties of RT Mixing
4.7. Analysis Outcomes for Design of Experiments
4.8. Analysis Outcome for Numerical Simulations
4.9. Spectral Shapes in Turbulence and in RT Mixing
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Herring, J.; Rilley, J.; Patterson, G.; Kraichnan, R. Growth of uncertainty in decaying isotropic turbulence. J. Atmos. Sci. 1973, 30, 997–1006. [Google Scholar] [CrossRef]
- Herring, J.; Orszag, S.; Kraichnan, R.; Fox, D. Decay of two-dimensional homogeneous turbulence. J. Fluid Mech. 1974, 66, 417–444. [Google Scholar] [CrossRef]
- Kraichnan, R.; Herring, J. A strain-based Lagrangian-history turbulence theory. J. Fluid Mech. 1978, 88, 355–367. [Google Scholar] [CrossRef]
- Gotoh, T.; Rogallo, J.; Herring, J.; Kraichnan, R. Lagrangian velocity correlations in homogeneous isotropic turbulence. Phys. Fluids A Fluid Dyn. 1993, 5, 2846–2864. [Google Scholar] [CrossRef]
- Chen, S.; Doolen, G.; Herring, J.; Kraichnan, R.; Orszag, S.; She, Z. Far-dissipation range of turbulence. Phys. Rev. Lett. 1993, 70, 3051–3054. [Google Scholar] [CrossRef] [PubMed]
- Kerr, R.; Herring, J. Prandtl number dependence of Nusselt number in direct numerical simulations. Phys. Scr. 2000, 419, 325–344. [Google Scholar] [CrossRef]
- Herring, J.; Kimura, Y. Some issues and problems of stably stratified turbulence. Phys. Scr. 2013, T155, 014031. [Google Scholar] [CrossRef]
- Abarzhi, S.; Gauthier, S.; Sreenivasan, K. Turbulent mixing and beyond: Non-equilibrium processes from atomistic to astrophysical scales I. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20120436. [Google Scholar] [CrossRef] [PubMed]
- Abarzhi, S. Review of theoretical modelling approaches of Rayleigh-Taylor instabilities and turbulent mixing. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 1809–1828. [Google Scholar] [CrossRef] [PubMed]
- Orlov, S.; Abarzhi, S.; Oh, S.; Barbastathis, G.; Sreenivasan, K. High-performance holographic technologies for fluid-dynamics experiments. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 1705–1737. [Google Scholar] [CrossRef] [PubMed]
- Anisimov, S.; Drake, R.; Gauthier, S.; Meshkov, E.; Abarzhi, S. What is certain and what is not so certain in our knowledge of Rayleigh-Taylor mixing? Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20130266. [Google Scholar] [CrossRef] [PubMed]
- Akula, B.; Suchandra, P.; Mikhaeil, M.; Ranjan, D. Dynamics of unstably stratified free shear flows: An experimental investigation of coupled Kelvin–Helmholtz and Rayleigh–Taylor instability. J. Fluid Mech. 2017, 816, 619–660. [Google Scholar] [CrossRef]
- Kraichnan, R. The structure of isotropic turbulence at very high Reynolds numbers. J. Fluid Mech. 1959, 5, 497–543. [Google Scholar] [CrossRef]
- Sreenivasan, K. On the scaling of the turbulence energy dissipation rate. Phys. Fluids 1984, 27, 1048–1051. [Google Scholar] [CrossRef]
- Sreenivasan, K.; Antonia, R. The phenomenology of small-scale turbulence. Annu. Rev. Fluid Mech. 1997, 28, 435–472. [Google Scholar] [CrossRef]
- Pouquet, A.; Mininni, P. The interplay between helicity and rotation in turbulence: Implications for scaling laws and small-scale dynamics. Philos. Trans. R. Soc. A 2010, 368, 1635–1662. [Google Scholar] [CrossRef] [PubMed]
- Sreenivasan, K. Turbulent mixing: A perspective. Proc. Natl. Acad. Sci. USA 2019, 116, 18175–18183. [Google Scholar] [CrossRef]
- Strutt, R.J.L. Investigation of the Character of the Equilibrium of an Incompressible Heavy Fluid of Variable Density. Proc. Lond. Math. Soc. 1883, s1-14, 170–177. [Google Scholar] [CrossRef]
- Davies, R.; Taylor, G. The mechanics of large bubbles rising through extended liquids and through liquids in tubes. Proc. R. Soc. London. Ser. A Math. Phys. Sci. 1950, 200, 375–390. [Google Scholar] [CrossRef]
- Arnett, W.D. Supernovae and Nucleosynthesis: An Investigation of the History of Matter, from the Big Bang to the Present; Princeton Series in Astrophysics; Princeton University Press: Princeton, NJ, USA, 1996. [Google Scholar]
- Haan, S.W.; Lindl, J.D.; Callahan, D.A.; Clark, D.S.; Salmonson, J.D.; Hammel, B.A.; Atherton, L.J.; Cook, R.C.; Edwards, M.J.; Glenzer, S.; et al. Point design targets, specifications, and requirements for the 2010 ignition campaign on the National Ignition Facility. Phys. Plasmas 2011, 18, 051001. [Google Scholar] [CrossRef]
- Abarzhi, S.; Goddard, W. Interfaces and mixing: Nonequilibrium transport across the scales. Proc. Natl. Acad. Sci. USA 2019, 116, 18171–18174. [Google Scholar] [CrossRef] [PubMed]
- Remington, B.; Park, H.S.; Casey, D.; Cavallo, R.; Clark, D.; Huntington, C.; Kuranz, C.; Miles, A.; Nagel, S.; Raman, K.; et al. Rayleigh-Taylor instabilities in high-energy density settings on the National Ignition Facility. Proc. Natl. Acad. Sci. USA 2019, 116, 18223–18228. [Google Scholar] [CrossRef] [PubMed]
- Meshkov, E.; Abarzhi, S. Group theory and jelly’s experiment of Rayleigh–Taylor instability and Rayleigh–Taylor interfacial mixing. Fluid Dyn. Res. 2019, 51, 065502. [Google Scholar] [CrossRef]
- Pfefferlé, D.; Abarzhi, S. Whittle maximum likelihood estimate of spectral properties of Rayleigh-Taylor interfacial mixing using hot-wire anemometry experimental data. Phys. Rev. E 2020, 102, 053107, Erratum in 2022, 106, 019901. [Google Scholar] [CrossRef] [PubMed]
- Abarzhi, S. Self-similar interfacial mixing with variable acceleration. Phys. Fluids 2021, 33, 122110. [Google Scholar] [CrossRef]
- Abarzhi, S.; Sreenivasan, K. Self-similar Rayleigh-Taylor mixing with accelerations varying in time and in space. Proc. Natl. Acad. Sci. USA 2022, 119, e2118589119. [Google Scholar] [CrossRef]
- Williams, K.; Abarzhi, S. Fluctuations spectra of specific kinetic energy, density, and mass flux in Rayleigh–Taylor mixing. Phys. Fluids 2023, 34, 122188. [Google Scholar] [CrossRef]
- Abarzhi, S.I. On fundamentals of Rayleigh-Taylor turbulent mixing. EPL Europhysics Lett. 2010, 91, 35001. [Google Scholar] [CrossRef]
- Sreenivasan, K. Fluid turbulence. Rev. Mod. Phys. 1999, 71, S383–S395. [Google Scholar] [CrossRef]
- Bershadskii, A. Distributed chaos and turbulence in Bénard-Marangoni and Rayleigh-Bénard convection. arXiv 2019, arXiv:1903.05018. [Google Scholar]
- Klewicki, J.; Chini, G.; Gibson, J. Prospectus: Towards the development of high-fidelity models of wall turbulence at large Reynolds number. Philos. Trans. R. Soc. A 2017, 375, 20160092. [Google Scholar] [CrossRef]
- Yakhot, V.; Donzis, D. Emergence of multiscaling in a random-force stirred fluid. Phys. Rev. Lett. 2017, 119, 044501. [Google Scholar] [CrossRef]
- Kolmogorov, A. The Local Structure of Turbulence in Incompressible Viscous Fluid for Very Large Reynolds’ Numbers. Dokl. Akad. Nauk SSSR 1941, 30, 299–303. [Google Scholar]
- Kolmogorov, A. On the degeneracy of isotropic turbulence in an incompressible viscous fluid. Dokl. Akad. Nauk SSSR 1941, 31, 538–541. [Google Scholar]
- Anderson, T.; Darling, D. A Test of Goodness-of-Fit. J. Am. Stat. Assoc. 1954, 49, 765–769. [Google Scholar] [CrossRef]
- Robey, H.F.; Zhou, Y.; Buckingham, A.C.; Keiter, P.; Remington, B.; Drake, R. The time scale for the transition to turbulence in a high Reynolds number, accelerated flow. Phys. Plasmas 2003, 10, 614–622. [Google Scholar] [CrossRef]
- Dalziel, S.; Linden, P.; Youngs, D. Self-similarity and internal structure of turbulence induced by Rayleigh–Taylor instability. J. Fluid Mech. 1999, 399, 1–48. [Google Scholar] [CrossRef]
- Meshkov, E.E. Studies of Hydrodynamic Instabilities in Laboratory Experiments; FGUC-VNIIEF: Sarov, Russia, 2006; ISBN 5-9515-0069-9. (In Russian) [Google Scholar]
- Swisher, N.; Kuranz, C.; Arnett, W.; Hurricane, O.; Robey, H.; Remington, B.; Abarzhi, S. Rayleigh-Taylor mixing in supernova experiments. Phys. Plasmas 2015, 22, 102707. [Google Scholar] [CrossRef]
- Meshkov, E. Some peculiar features of hydrodynamic instability development. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20120288. [Google Scholar] [CrossRef]
- Landau, L.; Lifshitz, E. Course of Theoretical Physics; Elsevier Science: Amsterdam, The Netherlands, 1987; Volume I–X. [Google Scholar]
- Abarzhi, S.; Gorobets, A.; Sreenivasan, K. Rayleigh–Taylor turbulent mixing of immiscible, miscible and stratified fluids. Phys. Fluids 2005, 17, 081705. [Google Scholar] [CrossRef]
- Abarzhi, S.; Bhowmick, A.; Naveh, A.; Pandian, A.; Swisher, N.; Stellingwerf, R.; Arnett, W. Supernova, nuclear synthesis, fluid instabilities, and interfacial mixing. Proc. Natl. Acad. Sci. USA 2019, 116, 18184–18192. [Google Scholar] [CrossRef] [PubMed]
- Abarzhi, S.; Hill, D.; Williams, K.; Wright, C. Buoyancy and drag in Rayleigh-Taylor and Richtmyer-Meshkov linear, nonlinear and mixing dynamics. Appl. Math. Lett. 2022, 31, 108036. [Google Scholar] [CrossRef]
- Abarzhi, S.; Hill, D.; Williams, K.; Li, J.; Remington, B.; Martinez, D.; Arnett, W. Fluid dynamics mathematical aspects of supernova remnants. Phys. Fluids 2023, 35, 034106. [Google Scholar] [CrossRef]
- Whittle, P. Curve and Periodogram Smoothing. J. R. Stat. Soc. 1957, 19, 38–63. [Google Scholar] [CrossRef]
- Kolmogorov, A.N. Sulla Determinazione Empirica di una Legge di Distribuzione. Giorn. Dell’Inst. Ital. Attuari. 1933, 4, 83–91. [Google Scholar]
- Smirnov, N. Table for Estimating the Goodness of Fit of Empirical Distributions. Ann. Math. Statist. 1948, 19, 279–281. [Google Scholar] [CrossRef]
- Stephens, M.A. EDF Statistics for Goodness of Fit and Some Comparisons. J. Am. Stat. Assoc. 1987, 69, 730–737. [Google Scholar] [CrossRef]
- Narasimha, R.; Sreenivasan, K. Relaminarization in highly accelerated turbulent boundary layers. J. Fluid Mech. 1973, 61, 417–447. [Google Scholar] [CrossRef]
- Read, K. Experimental investigation of turbulent mixing by Rayleigh–Taylor instability. Phys. D 1984, 12, 45–58. [Google Scholar] [CrossRef]
- Kraft, W.; Banerjee, A.; Andrews, M. On hot-wire diagnostics in Rayleigh–Taylor mixing layers. Exp. Fluids 2009, 47, 49–68. [Google Scholar] [CrossRef]
- Akula, B.; Ranjan, D. Dynamics of buoyancy-driven flows at moderately high Atwood numbers. J. Fluid Mech. 2016, 795, 313–355. [Google Scholar] [CrossRef]
- Reynolds number effects on Rayleigh–Taylor instability with possible implications for type Ia supernovae. Nat. Phys. 2006, 2, 562–568. [CrossRef]
- Schilling, O. Self-similar Reynolds-averaged mechanical–scalar turbulence models for Rayleigh–Taylor, Richtmyer–Meshkov, and Kelvin–Helmholtz instability-induced mixing in the small Atwood number limit. Phys. Fluids 2021, 33, 085129. [Google Scholar] [CrossRef]
- Schumacher, J.; Sreenivasan, K. Colloquium: Unusual dynamics of convection in the Sun. Rev. Mod. Phys. 2022, 92, 041001. [Google Scholar] [CrossRef]
- Ristorcelli, J.; Clark, T. Rayleigh–Taylor turbulence: Self-similar analysis and direct numerical simulations. J. Fluid Mech. 2004, 507, 213–253. [Google Scholar] [CrossRef]
- Glimm, J.; Sharp, D.; Kaman, T.; Lim, H. New directions for Rayleigh-Taylor mixing. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20120183. [Google Scholar] [CrossRef] [PubMed]
- Grinstein, F.; Saenz, J.; Germano, M. Coarse grained simulations of shock-driven turbulent material mixing. Phys. Fluids 2021, 33, 035131. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | |||||
|---|---|---|---|---|---|
| 110 | 3700 | ||||
| 150 | 3700 | ||||
| 100 | 4000 |
| Quantity | |||
|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Williams, K.C.; Abarzhi, S.I. Velocity Fluctuations Spectra in Experimental Data on Rayleigh–Taylor Mixing. Atmosphere 2023, 14, 1178. https://doi.org/10.3390/atmos14071178
Williams KC, Abarzhi SI. Velocity Fluctuations Spectra in Experimental Data on Rayleigh–Taylor Mixing. Atmosphere. 2023; 14(7):1178. https://doi.org/10.3390/atmos14071178
Chicago/Turabian StyleWilliams, Kurt C., and Snezhana I. Abarzhi. 2023. "Velocity Fluctuations Spectra in Experimental Data on Rayleigh–Taylor Mixing" Atmosphere 14, no. 7: 1178. https://doi.org/10.3390/atmos14071178
APA StyleWilliams, K. C., & Abarzhi, S. I. (2023). Velocity Fluctuations Spectra in Experimental Data on Rayleigh–Taylor Mixing. Atmosphere, 14(7), 1178. https://doi.org/10.3390/atmos14071178