
Particle Microphysical Parameters and the Complex Refractive Index from 3β + 2α HSRL/Raman Lidar Measurements: Conditions of Accurate Retrieval, Retrieval Uncertainties and Constraints to Suppress the Uncertainties

Abstract
1. Introduction
- The number of input optical data—we denote them as 3β + 2α set (or simply “3 + 2”), is very limited. Thus, the algorithms need to make optimum use of the information content included in this low number of optical input data.
- Measurement errors of the individual optical data points (εg) usually are 10% or higher unless we apply unrealistically long data averaging times (in space and time); the parameter g denotes α or β.
- The underlying mathematical problem is ill posed, underdetermined, sensitive to measurement errors, and does not have a unique solution [11].
- The identification of the final solution space (a) requires the use of a priori information about particle optical and microphysical properties, (b) forces us to apply mathematical and/or physical constraints to determine the final solution space, and (c) calls for specialized software and data operators who possess wide experience in the specific type of data analysis connected to the problem of dealing with ill-posed inverse problems.
- (1)
- A reliable, mathematically sound minimization procedure, i.e., a method that allows us to estimate PMPs with preset accuracy and with a preset confidence level, an uncertainty that will not become larger than what can be estimated by this minimization procedure.
- (2)
- An uncertainty-analysis methodology that can be applied for any method that is used for retrieving PMPs from optical data taken with lidar and other remote sensing instruments, e.g., sun photometer and polarimeter and most importantly: the combination of data collected simultaneously (time and space) with active and passive remote sensors.
- (3)
- An approach for the identification of (physical and mathematical) constraints that allow us to restrict the (full) solution space obtained from the inversion process so that the final solution can be determined.
- Identification of the solution space of the CRI;
- Analysis of the solution space structure, convexity and local minima;
- Retrieving the PMPs for the values of the CRI identified in point 2;
- Uncertainty estimations of the retrieved PMPs in dependence of the values of the measurement uncertainties.
- Exploration of the concept of using hygroscopic growth of aerosol pollution under varying relative humidity (RH) conditions for constraining the solution space of the CRI and continuation of the study described in [14].
2. Methodology
2.1. Ill-Posed Problem: Choice of Solution Method
2.2. Minimization Procedure
- -
- The lidar ratio Λ(λl) at one of the wavelengths, i.e., either at λ1 = 355 or λ2 = 532 nm,
- -
- The backscatter- [] and extinction-related [] Ångström exponents at the wavelength pair λ1 = 355 and λ2 = 532 nm, and
- -
- The backscatter-related Ångström exponent [] at the wavelength pair λ2 = 532 and λ3 = 1064 nm.
2.3. Uncertainties of Retrieved Microphysical Parameters
- The CRI is known for the moment or we have an estimation of the CRI at a given value m.
- The PSD is monomodal and defined for the accumulation mode. Without loss of generality we write the conditions for mean radius and EAE of the accumulation mode as
- 3.
- Particle backscatter coefficients measured with lidar are more accurate than particle extinction coefficients. Therefore, if we use for example εα = 15% uncertainty for the extinction coefficient, the uncertainty of the backscatter coefficient is less, i.e., |εβ| ≤ |εα| = 15%.
- 4.
- Backscatter coefficients are sensitive to properties of the PMPs including their CRIs. In contrast, extinction coefficients are sensitive to size and integral properties of the PMPs, only. In view of assumption # 3, we can focus on investigating the uncertainties of the PMP retrieval versus uncertainties of the measured extinction coefficients εα [28].
- 5.
- We also consider the most extreme uncertainty scenarios, i.e., the uncertainties of the two extinction coefficients have opposite sign
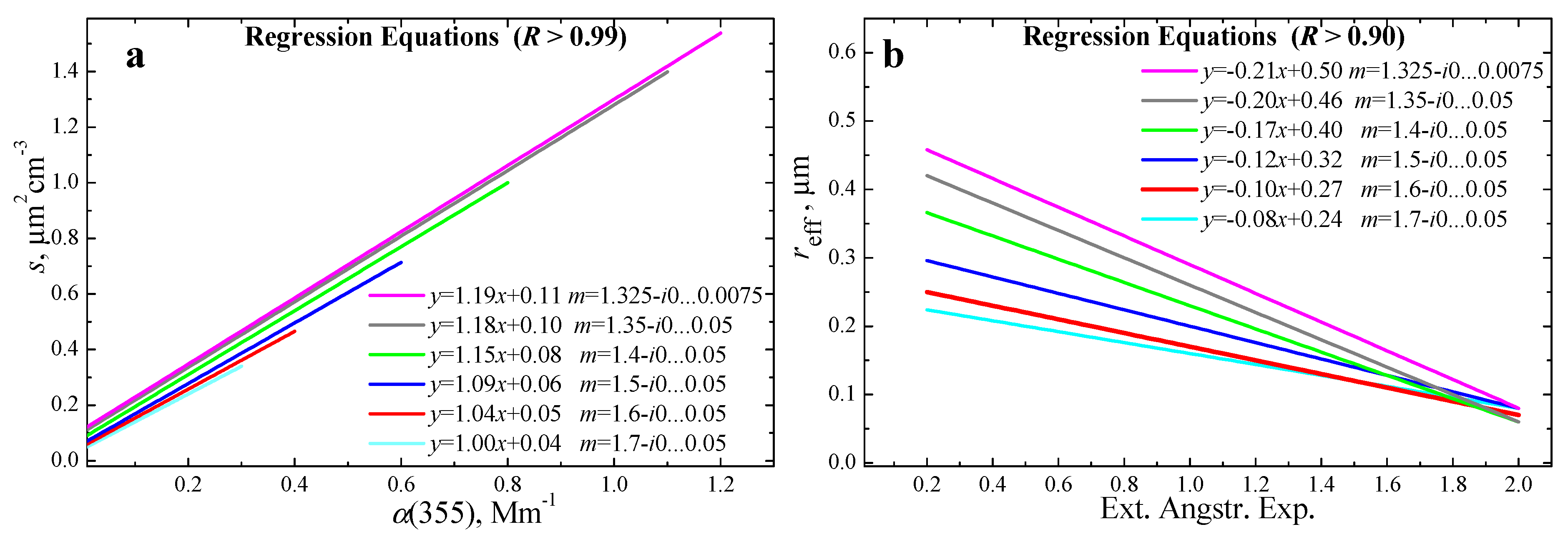
- Surface-area concentration is strongly correlated with the extinction coefficients at 355 nm. We find a high correlation coefficient that exceeds R > 0.99 and
- The regression coefficient as increases from 1 at m = 1.7-i0…0.05 to 1.19 at m = 1.325-i0…0.0075.

3. Simulation
3.1. Analysis of Solution Space
- The larger the (mean) particle size (the lower number concentration), the lower are the real and imaginary parts of the CRI, and conversely.
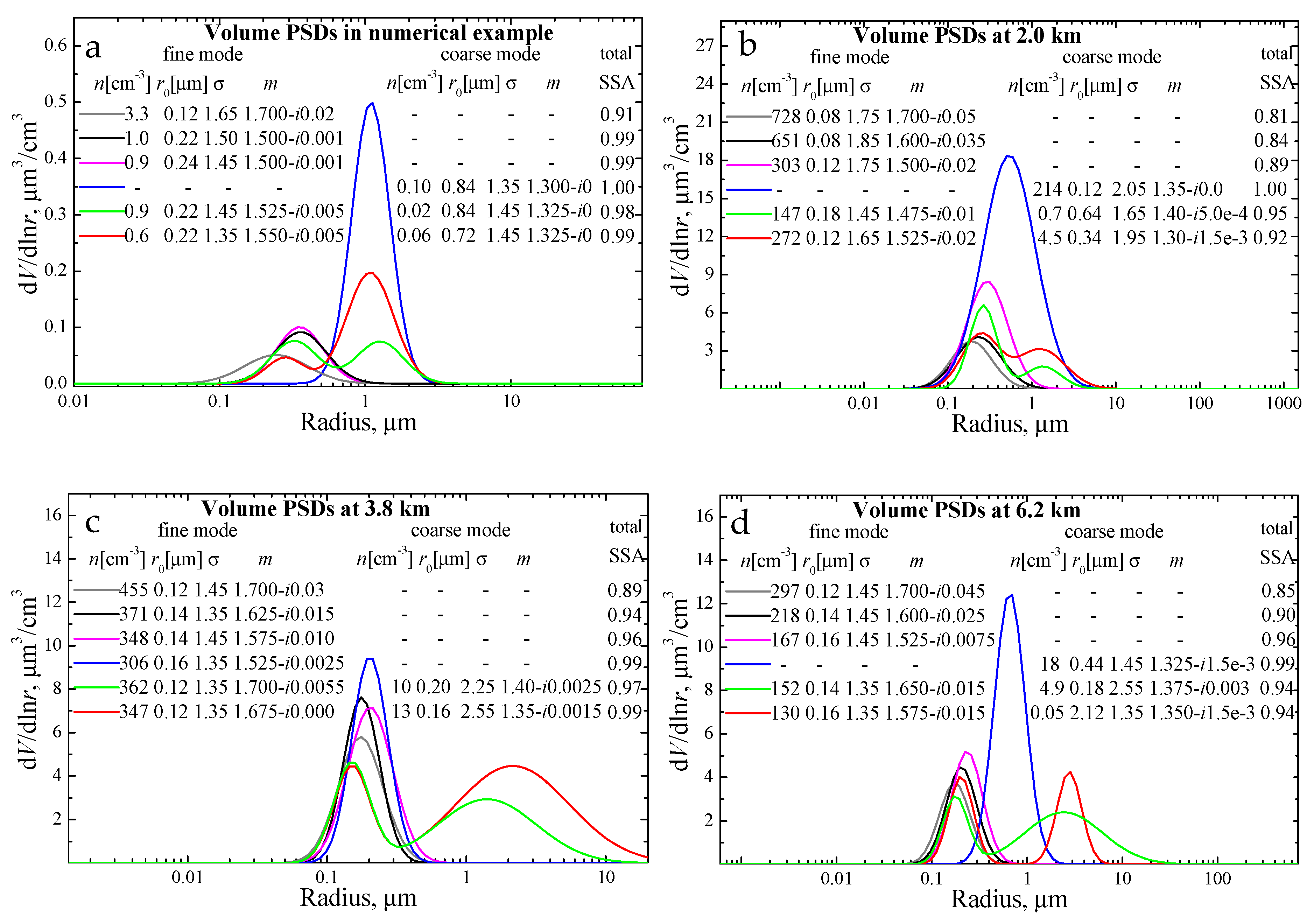
- One and the same optical dataset can be produced by bimodal and monomodal PSDs. In these cases, the CRIs of monomodal PSDs (see black and pink solutions in Figure 5a) are intermediate between the CRIs of the fine and coarse modes of the bimodal PSDs, respectively (see green and red solutions in Figure 5a). However, single scattering albedo (SSA) of the monomodal (0.99) and bimodal PSDs (0.98–0.99) at 532 nm do not differ significantly.
- The number of individual bimodal PSDs retrieved with discrepancy ρ ≤ 5% (Figure 5a shows only 2 of the bimodal PSDs) is larger than the number of individual monomodal PSDs retrieved within the same discrepancy interval (Figure 5a shows only 3 examples of monomodal PSDs). Furthermore, the discrepancies of the bimodal PSD are less than 2% in spite of the fact that we consider for this numerical example optical data that are produced by a monomodal PSD (see Table 1).
- The numerical example shown in Figure 5a is typical (representative) for any other (arbitrary) optical dataset 3β + 2α. We stress the fact that the non-uniqueness of the solutions that follow from solving Equation (1) is caused not only by the uncertainty of the optical input data but also by the high degree of freedom the 3β + 2α datasets permit. We presented and discussed in previous publications examples that cause this high degree of freedom, as for example wavelength-dependent CRIs, shape of PSDs, and the fact that any logarithmic-normal PSD has an analogue solution given by the sum of 2 other logarithmic-normal PSDs. Furthermore, the degree of freedom is much larger for bimodal PSDs. We need to keep this fact in mind when we analyze results retrieved, for instance, with passive remote sensors. In that case, we usually obtain bimodal PSDs [20,29,30].
3.2. Use of the Minimization Procedure
- (a)
- in the 1st case, there are 3 minima:
| Kind of Minimum | Fg [%] | m | r0 [μm] | σ | n [cm−3] |
| global | 4 × 10−7 | 1.50-i0.0010 | 0.22 | 1.50 | 1.00 |
| 1st local | 3 × 10−4 | 1.59-i0.0180 | 0.19 | 1.54 | 1.40 |
| 2nd local | 3 × 100 | 1.301-i0.000 | 0.80 | 1.35 | 0.12 |
- (b)
- in the 2nd case, there are 3 minima as well:
| Kind of Minimum | Fg [%] | m | r0 [μm] | σ | n [cm−3] |
| global | 3 × 10−3 | 1.507-i0.0024 | 0.217 | 1.50 | 1.03 |
| 1st local | 5 × 10−2 | 1.585-i0.0170 | 0.188 | 1.54 | 1.34 |
| 2nd local | 3 × 100 | 1.301-i0.0000 | 0.800 | 1.35 | 0.12 |
- (c)
- in the 3rd case, there are 2 minima:
| Kind of Minimum | Fg [%] | m | r0 [μm] | σ | n [cm−3] |
| global | 2 × 10−1 | 1.540-i0.0100 | 0.21 | 1.51 | 1.11 |
| local | 3 × 100 | 1.301-i0.0000 | 0.800 | 1.35 | 0.12 |
- -
- At the beginning of the “canyon” in Figure 7a,c at point m = 1.525-i0.0005 (Fg = 9.2%) and at point m = 1.547-i0.0 (Fg = 8.1%), respectively. Both points are close to the true solution;
- -
- -
- At the end of the “canyon” in Figure 7b,d at points m = 1.675-i0.02 (Fg = 3.7%) and m = 1.65-i0.03 (Fg = 5.9%), respectively, and
- -
- Even at the beginning of the plane (mR, mI) in Figure 7e,f,h. The values of the complex refractive index in these cases are m = 1.31-i0.0022 (Fg = 3.5%), m = 1.34-i0.001 (Fg = 2.1%) and at m = 1.325-i0.0 (Fg = 5.1%), respectively.

- Holds true not only in the case considered in this example,
- It can be generalized for arbitrary combinations of elements of the vector x, and
3.3. Use of Error Analysis
- Scan of the full domain of the CRI with the available method that is used to retrieve the solution space (see Figure 5).
- Identification of the final solution space by applying the minimization procedure to the CRI solution trajectory if the optical input data are acquired with an accuracy better than ΔF~10−8 (see Figure 6a).
- Investigating the PMPs that are linked to the CRI solution trajectory and estimating their uncertainties that depend on the measurement uncertainty εα of the optical data (see Figure 8).
- Decision making about the final solution space (Figure 8). This final decision is based on (mathematical and physical) a priori information as for example measurement uncertainties, aerosol typing, positivity (no negative number concentrations) of the retrieved PSDs, smoothness (modality) of the retrieved PSDs (see Section 3.1 and point 5 of Section 4).
4. Case Study
- We retrieve the solution space by applying PA to the optical dataset 3β + 2α. Figure 5b shows the PSDs and respective PMPs (see legend). The number concentration in this solution space varies between 214 and 728 cm−3, the mean radius varies between 0.115 and 0.075 μm, the CRI varies between 1.35-i0.0 and 1.7-i0.05, and SSA at 532 nm varies between 0.81 and 1.00 (see solutions in gray and blue). The retrieved PSDs can be both monomodal and bimodal. The total effective radius is 0.16 μm in the case of a monomodal PSD (gray) whereas it increases to 0.35 μm in the case of a bimodal PSD (red).
- We use the minimization procedure to find the minima in the “canyon”. We find three minima (see Figure 6d):
| Kind of Minimum | Fg [%] | m | r0 [μm] | σ | n [cm−3] |
| global | 0.01 | 1.657-i0.045 | 0.862 | 1.77 | 501 |
| 1st local | 2.0 | 1.461-i0.007 | 0.120 | 1.74 | 269 |
| 2nd local | 4.0 | 1.324-i0.000 | 0.115 | 2.17 | 178 |
- 4.
- We also find the PMPs in the “canyon” and estimate their uncertainties depending on the measurement uncertainty of the optical data, i.e., εα = 15%. Figure 8b shows the retrieved surface-area (blue) and number (green) concentrations, the effective radius (red) and respective uncertainty bars versus CRI and the assumption that the PSDs are monomodal. Number concentration varies from 125 to 1030 cm−3, surface-area concentration from 77 to 113 Mm−1, the effective radius from 0.13 to 0.6 μm, the real part of the CRI from 1.324 to 1.657 and the imaginary part from i0.0 to i0.045.
- 5.
- The solution space we identified in Figure 8b, and assuming a measurement uncertainty of 15%, shows a widespread of values for the PMPs. We investigate if this spread can be reduced.
n ∈ [147;277] cm−3; SSA(532) ∈ [0.95;1.00].
n ∈ [286;372] cm−3; SSA(532) ∈ [0.96;0.99].
n ∈ [130;167] cm−3; SSA(532) ∈ [0.94;0.96].
- Lidar measurements are not accurate and measurement uncertainty can exceed the level of 15% we used in our error analysis in this study;
- Radiosonde measurements also have uncertainties, which means that constraints we use to localize the true CRI on solution trajectories are not correct;
- Particularly, with regard to radiosonde, we must keep in mind that the balloons usually do not measure the same air masses as the lidar system does because balloons (a) either drift away from the lidar beam during ascent or (b) lidar site and balloon site are not collocated at all;
- Finally, the model MERRA-2 that we use is not ideal and may not properly describe the particle hygroscopic features. There are many different hygroscopicity observations published in literature and these results may likely lead to a spread of the correlations shown here.
5. Conclusions
- The retrieval uncertainty of the CRI can be described by a trajectory (“canyon”) that crosses the complete (search) domain of the CRI (mR, mI) from its lower-left corner, which means mRmin, mImin, to the top-right corner, which means mRmax, mImax. The “canyon” length and width are determined by the CRI domain and measurement uncertainty, respectively. The retrieval uncertainty εs of surface-area concentration is proportional to the measurement uncertainty εα(355) of the extinction coefficient at 355 nm [see Equation (19)].
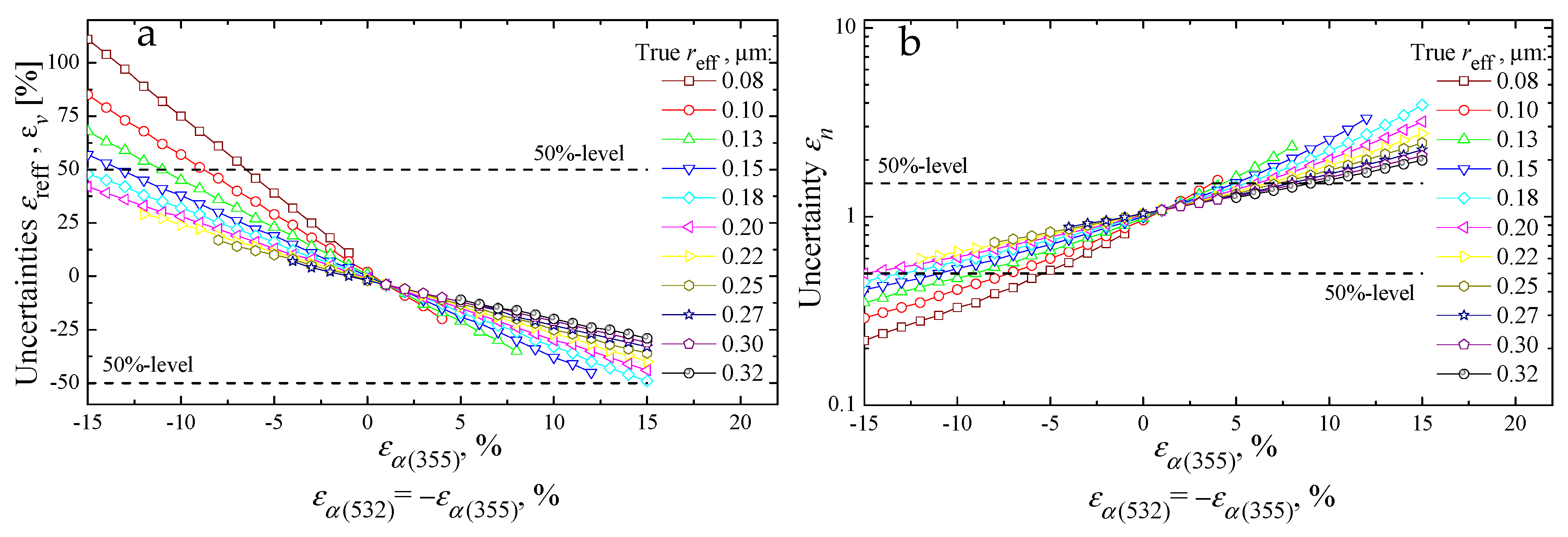
- The retrieval uncertainty of the effective radius (εreff) is inversely proportional to the uncertainty of the measurement uncertainties of the extinction-related Ångström exponent (EAE). This uncertainty is determined by the uncertainties of the measured extinction coefficients [εα(355) and εα(532)]. We find uncertainties εreff that are 1.8…16.7 times larger than the measurement uncertainties εα(355) [see Equations (24) and (25)].
- The retrieval uncertainty εv of volume concentration is close to εreff.
- The retrieval uncertainty εn of number concentration is proportional to the inverse square of the retrieval uncertainty εreff of the effective radius [see Equation (30)].
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Müller, D.; Wandinger, U.; Ansmann, A. Microphysical particle parameters from extinction and backscatter lidar data by inversion with regularization: Theory. Appl. Opt. 1999, 38, 2346–2357. [Google Scholar] [CrossRef] [PubMed]
- Veselovskii, I.; Kolgotin, A.; Griaznov, V.; Müller, D.; Franke, K.; Whiteman, D.N. Inversion of multiwavelength Raman lidar data for retrieval of bimodal aerosol size distribution. Appl. Opt. 2004, 43, 1180–1195. [Google Scholar] [CrossRef] [PubMed]
- Böckmann, C.; Miranova, I.; Müller, D.; Scheidenbach, L.; Nessler, R. Microphysical aerosol parameters from multiwavelength lidar. J. Opt. Soc. Am. A 2005, 22, 518–528. [Google Scholar] [CrossRef]
- De Graaf, M.; Apituley, A.; Donovan, D. Feasibility study of integral property retrieval for tropospheric aerosol from Raman lidar data using principle component analysis. Appl. Opt. 2013, 52, 2173–2186. [Google Scholar] [CrossRef] [PubMed]
- Samoiliva, S.; Penner, I.; Balin, Y. Separate retrieval of microphysical characteristics in aerosol fractions from laser sensing data. J. Quant. Spectrosc. Radiat. Transf. 2022, 285, 108168. [Google Scholar] [CrossRef]
- Chemyakin, E.; Müller, D.; Burton, S.; Kolgotin, A.; Hostetler, C.; Ferrare, R. “Arrange & average” algorithm for the retrieval of aerosols parameters from multiwavelength HSRL/Raman lidar data. Appl. Opt. 2014, 53, 7254–7266. [Google Scholar]
- Müller, D.; Chemyakin, E.; Kolgotin, A.; Ferrare, R.A.; Hostetler, C.A.; Romanov, A.; Tesche, M. Automated, unsupervised inversion of multiwavelength lidar data with TIARA: Assessment of retrieval performance of microphysical parameters using simulated data. Appl. Opt. 2019, 58, 4981–5008. [Google Scholar] [CrossRef]
- Hair, J.W.; Hostetler, C.A.; Cook, A.L.; Harper, D.B.; Ferrare, R.A.; Mack, T.L.; Welch, W.; Izquierdo, L.R.; Hovis, F.E. Airborne high-spectral-resolution lidar for profiling aerosol optical profiles. Appl. Opt. 2008, 47, 6734–6752. [Google Scholar] [CrossRef]
- Ansmann, A.; Riebesell, M.; Wandinger, U.; Weitkamp, C.; Voss, E.; Lahmann, W.; Michaelis, W. Combined Raman elastic-backscatter lidar for vertical profiling of moisture, aerosols extinction, backscatter, and lidar ratio. Appl. Phys. B 1992, 55, 18. [Google Scholar] [CrossRef]
- Müller, D.; Böckmann, C.; Kolgotin, A.; Schneidenbach, L.; Chemyakin, E.; Rosemann, J.; Znak, P.; Romanov, A. Microphysical particle properties derived from inversion algorithms developed in the framework of EARLINET. Atmos. Meas. Tech. 2016, 9, 5007–5035. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. (Eds.) Solution of Ill-Posed Problems; Wiley: New York, NY, USA, 1977. [Google Scholar]
- Veselovskii, I.; Kolgotin, A.; Müller, D.; Whiteman, D.N. Information content of multiwavelength lidar data with respect to microphysical particle properties derived from eigenvalue analysis. Appl. Opt. 2005, 44, 5292–5303. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Burton, S.P.; Chemyakin, E.; Liu, X.; Knobelspiesse, K.; Stamnes, S.; Sawamura, P.; Moore, R.H.; Hostetler, C.A.; Ferrare, R.A. Information content and sensitivity of the 3β+2α lidar measurement system for aerosol microphysical retrievals. Atmos. Meas. Tech. 2016, 9, 5555–5574. [Google Scholar] [CrossRef]
- Veselovskii, I.; Whiteman, D.N.; Kolgotin, A.; Andrews, E.; Korenskii, M. Demonstration of aerosol property profiling by multiwavelength lidar under varying relative humidity conditions. J. Atmos. Ocean. Technol. 2009, 26, 1543–1557. [Google Scholar] [CrossRef]
- Bohren, C.F.; Huffman, D.R. (Eds.) Absorption and Scattering of Light by Small Particles; Wiley: New York, NY, USA, 1983. [Google Scholar]
- Twomey, S. (Ed.) Introduction to the Mathematics of Inversion in Remote Sensing and Direct Measurements; Elsevier: New York, NY, USA, 1977. [Google Scholar]
- Doicu, A.; Trautmann, T.; Schreier, F. Numerical Regularization for Atmospheric Inverse Problems; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Kolgotin, A.; Korenskiy, M.; Veselovskii, I.; Whiteman, D.N. Direct estimation of fine and coarse mode particle parameters from multiwavelength lidar measurements. In Proceedings of the ILRC 27, New York, NY, USA, 5–10 July 2015. PS-A5-9. [Google Scholar]
- Kolgotin, A.; Müller, D.; Chemyakin, E.; Romanov, A. Improved identification of the solution space of aerosol microphysical properties derived from the inversion of profiles of lidar optical data, part 2: Simulations with synthetic optical data. Appl. Opt. 2016, 55, 9850–9865. [Google Scholar] [CrossRef]
- Torres, B.; Dubovik, O.; Fuertes, D.; Schuster, G.; Eugenia Cachorro, V.; Lapyonok, T.; Goloub, P.; Blarel, L.; Barreto, A.; Mallet, M.; et al. Advanced characterisation of aerosol size properties from measurements of spectral optical depth using the GRASP algorithm. Atmos. Meas. Tech. 2017, 10, 3743–3781. [Google Scholar] [CrossRef]
- Veselovskii, I.; Goloub, P.; Podvin, T.; Tanre, D.; da Silva, A.; Colarco, P.; Castellanos, P.; Korenskiy, M.; Hu, Q.; Whiteman, D.N.; et al. Characterization of smoke/dust episode over West Africa: Comparison of MERRA-2 modeling with multiwavelength Mie-Raman lidar observations. Atmos. Meas. Tech. 2018, 11, 949–969. [Google Scholar] [CrossRef]
- Müller, D.; Hostetler, C.A.; Ferrare, R.A.; Burton, S.P.; Chemyakin, E.; Kolgotin, A.; Hair, J.W.; Cook, A.L.; Harper, D.B.; Rogers, R.R.; et al. Airborne multiwavelength High Spectral Resolution Lidar (HSRL-2) observations during TCAP 2012: Vertical profiles of optical and microphysical properties of a smoke/urban haze plume over the northeastern coast of the US. Atmos. Meas. Tech. 2014, 7, 3487–3496. [Google Scholar] [CrossRef]
- Kolgotin, A.; Müller, D.; Chemyakin, E.; Romanov, A. Perspectives of the explicit retrieval of the complex refractive index of aerosols from optical data taken with lidar. In Proceedings of the ILRC 27, New York, NY, USA, 5–10 July 2015. PS-B5-16. [Google Scholar]
- Gill, P.E.; Murray, W.; Wright, M.H. Practical Optimization; Emerald Publishing: Bingley, UK, 1982. [Google Scholar]
- Kolgotin, A.; Müller, D.; Chemyakin, E.; Romanov, A. Improved identification of the solution space of aerosol microphysical properties derived from the inversion of profiles of lidar optical data, part 1: Theory. Appl. Opt. 2016, 55, 9839–9849. [Google Scholar] [CrossRef]
- Ansmann, A.; Wagner, F.; Müller, D.; Althausen, D.; Herber, A.; von Hoyningen-Huene, W.; Wandinger, U. European pollution outbreaks during ACE 2: Optical particle properties inferred from multiwavelength lidar and star-Sun photometry. J. Geophys. Res. 2002, 107, 4259. [Google Scholar] [CrossRef]
- Kolgotin, A.; Müller, D.; Veselovskii, I.; Korenskiy, M. Aerosol typing: How many aerosol types can be inferred from multiwavelength HSRL/Raman lidar data? In Proceedings of the 1st ELC, Thessaloniki, Greece, 3–5 July 2018; ID07. pp. 109–110. [Google Scholar]
- Kolgotin, A.; Müller, D.; Veselovskii, I.; Korenskiy, M. Pre-filter analysis for retrieval of microphysical particle parameters: A quality-assurance method applied to 3 backscatter (β) +2 extinction (α) optical data taken with HSRL/Raman lidar. Appl. Opt. 2023, 62, 5203–5223. [Google Scholar] [CrossRef]
- Bovchaliuk, A.; Milinevsky, G.; Danylevsky, V.; Goloub, P.; Dubovik, O.; Holdak, A.; Ducos, F.; Sosonkin, M. Variability of aerosol properties over Eastern Europe observed from ground and satellites in the period from 2003 to 2011. Atmos. Chem. Phys. 2013, 13, 6587–6602. [Google Scholar] [CrossRef]
- Mallet, M.; Dulac, F.; Formenti, P.; Nabat, P.; Sciare, J.; Roberts, G.; Pelon, J.; Ancellet, G.; Tanré, D.; Parol, F.; et al. Overview of the Chemistry-Aerosol Mediterranean Experiment/Aerosol Direct Radiative Forcing on the Mediterranean Climate (ChArMEx/ADRIMED) summer 2013 campaign. Atmos. Chem. Phys. 2016, 16, 455–504. [Google Scholar] [CrossRef]
- Burton, S.P.; Vaughan, M.A.; Ferrare, R.A.; Hostetler, C.A. Separating mixtures of aerosol types in airborne HSRL data. Atmos. Meas. Tech. 2014, 7, 419–436. [Google Scholar] [CrossRef]
- Mylonaki, M.; Giannakaki, E.; Papayannis, A.; Papanikolaou, C.-A.; Komppula, M.; Nicolae, D.; Papagiannopoulos, N.; Amodeo, A.; Baars, H.; Soupiona, O. Aerosol type classification analysis using EARLINET multiwavelength and depolarization lidar observations. Atmos. Chem. Phys. 2021, 21, 2211–2227. [Google Scholar] [CrossRef]
- Müller, D.; Wagner, F.; Wandinger, U.; Ansmann, A.; Wendisch, M.; Althausen, D.; von Hoyningen-Huene, W. Microphysical particle parameters from extinction and backscatter lidar data by inversion with regularization: Experiment. Appl. Opt. 2000, 39, 1879–1892. [Google Scholar] [CrossRef]
- Pappalardo, G.; Amodeo, A.; Apituley, A.; Comeron, A.; Freudenthaler, V.; Linné, H.; Ansmann, A.; Bösenberg, J.; D’Amico, G.; Mattis, I.; et al. EARLINET: Towards an advanced sustainable European aerosol lidar network. Atmos. Meas. Tech. 2014, 7, 2389–2409. [Google Scholar] [CrossRef]
- Sorrentino, A.; Sannino, A.; Spinelli, N.; Piana, M.; Boselli, A.; Tontodonato, V.; Castellano, P.; Wang, X. A Bayesian parametric approach to the retrieval of the atmospheric number size distribution from lidar data. Atmos. Meas. Tech. 2022, 15, 149–164. [Google Scholar] [CrossRef]
- Samaras, S.; Nicolae, D.; Böckmann, C.; Vasilescu, J.; Binietoglou, I.; Labzovskii, L.; Toanca, F.; Papayannis, A. Using Raman-lidar-based regularized microphysical retrievals and Aerosol Mass Spectrometer measurements for the characterization of biomass burning aerosols. J. Comput. Phys. 2015, 299, 156–174. [Google Scholar] [CrossRef]
- Sawamura, P.; Moore, R.H.; Burton, S.P.; Chemyakin, E.; Müller, D.; Kolgotin, A.; Ferrare, R.A.; Hostetler, C.A.; Ziemba, L.D.; Beyersdorf, A.J.; et al. HSRL-2 aerosol optical measurements and microphysical retrievals vs. airborne in situ measurements during DISCOVER-AQ 2013: An intercomparison study. Atmos. Chem. Phys. 2017, 17, 7229–7243. [Google Scholar] [CrossRef]
- Müller, D.; Kolgotin, A.; Mattis, I.; Petzold, A.; Stohl, A. Vertical profiles of microphysical particle properties derived from inversion with two-dimensional regularization of multiwavelength Raman lidar data: Experiment. Appl. Opt. 2011, 50, 2069–2079. [Google Scholar] [CrossRef]
- Svenningsson, B.; Rissler, J.; Swietlicki, E.; Mircea, M.; Bilde, M.; Facchini, M.C.; Decesari, S.; Fuzzi, S.; Zhou, J.; Monster, J.; et al. Hygroscopic growth and critical supersaturations for mixed aerosol particles of inorganic and organic compounds of atmospheric relevance. Atmos. Chem. Phys. 2006, 6, 1937–1952. [Google Scholar] [CrossRef]
- Carrico, C.M.; Kus, P.; Rood, M.J.; Quinn, P.K.; Bates, T.S. Mixtures of pollution, dust, sea salt, and volcanic aerosol during ACE-Asia: Radiative properties as a function of relative humidity. J. Geophys. Res. 2003, 108, 8650. [Google Scholar] [CrossRef]
- Mamouri, R.E.; Papayannis, A.; Amiridis, V.; Müller, D.; Kokkalis, P.; Rapsomanikis, S.; Karageorgos, E.T.; Tsaknakis, G.; Nenes, A.; Kazadzis, S.; et al. Multi-wavelength Raman lidar, sun photometric and aircraft measurements in combination with inversion models for the estimation of the aerosol optical and physico-chemical properties over Athens, Greece. Atmos. Meas. Tech. 2012, 5, 1793–1808. [Google Scholar] [CrossRef]
- Papayannis, A.; Mamouri, R.E.; Amiridis, V.; Remoundaki, E.; Tsaknakis, G.; Kokkalis, P.; Veselovskii, I.; Kolgotin, A.; Nenes, A.; Fountoukis, C. Optical-microphysical properties of Saharan dust aerosols and composition relationship using a multi-wavelength Raman lidar, in situ sensors and modelling: A case study analysis. Atmos. Chem. Phys. 2012, 12, 4011–4032. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical | Measurements | ||
|---|---|---|---|---|
| Example | at 2.0 km | at 3.8 km | at 6.2 km | |
| ρmono, % | 4–5 | 1–4 | 11–15 | 15–26 |
| ρbi, % | 0.4–1.6 | 0.3–0.4 | 0.2–2.8 | 0.3–2.4 |
| s, μm2cm−3 | ||||
| reff, μm | ||||
| v, μm3cm−3 | ||||
| n, cm−3 | ||||
| SSA (532) |
| Aerosol Types | RH < 5% | 20% ≤ RH ≤ 25% | RH > 90% | |||
|---|---|---|---|---|---|---|
| GF | CRI | GF | CRI | GF | CRI | |
| organic carbon | 1 | 1.53-i0.009 | 1.10 | 1.49-i0.007 | 2.5 | 1.35-i0.001 |
| black carbon | 1 | 1.75-i0.44 | 1 | 1.75-i0.44 | 1.9 | 1.43-i0.100 |
| sea salt | 1 | 1.50-i0.000 | 1.15 | 1.44-i0.000 | 2.5 | 1.35-i0.000 |
| sulfate | 1 | 1.43-i0.000 | 1.18 | 1.40-i0.000 | 2.0 | 1.35-i0.000 |
| dust | 1 | 1.53-i0.0026 | 1 | 1.53-i0.0026 | 1 | 1.53-i0.0026 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolgotin, A.; Müller, D.; Romanov, A. Particle Microphysical Parameters and the Complex Refractive Index from 3β + 2α HSRL/Raman Lidar Measurements: Conditions of Accurate Retrieval, Retrieval Uncertainties and Constraints to Suppress the Uncertainties. Atmosphere 2023, 14, 1159. https://doi.org/10.3390/atmos14071159
Kolgotin A, Müller D, Romanov A. Particle Microphysical Parameters and the Complex Refractive Index from 3β + 2α HSRL/Raman Lidar Measurements: Conditions of Accurate Retrieval, Retrieval Uncertainties and Constraints to Suppress the Uncertainties. Atmosphere. 2023; 14(7):1159. https://doi.org/10.3390/atmos14071159
Chicago/Turabian StyleKolgotin, Alexei, Detlef Müller, and Anton Romanov. 2023. "Particle Microphysical Parameters and the Complex Refractive Index from 3β + 2α HSRL/Raman Lidar Measurements: Conditions of Accurate Retrieval, Retrieval Uncertainties and Constraints to Suppress the Uncertainties" Atmosphere 14, no. 7: 1159. https://doi.org/10.3390/atmos14071159
APA StyleKolgotin, A., Müller, D., & Romanov, A. (2023). Particle Microphysical Parameters and the Complex Refractive Index from 3β + 2α HSRL/Raman Lidar Measurements: Conditions of Accurate Retrieval, Retrieval Uncertainties and Constraints to Suppress the Uncertainties. Atmosphere, 14(7), 1159. https://doi.org/10.3390/atmos14071159