
Accuracy Analysis of Real-Time Precise Point Positioning—Estimated Precipitable Water Vapor under Different Meteorological Conditions: A Case Study in Hong Kong



Abstract
1. Introduction
2. Materials and Methods
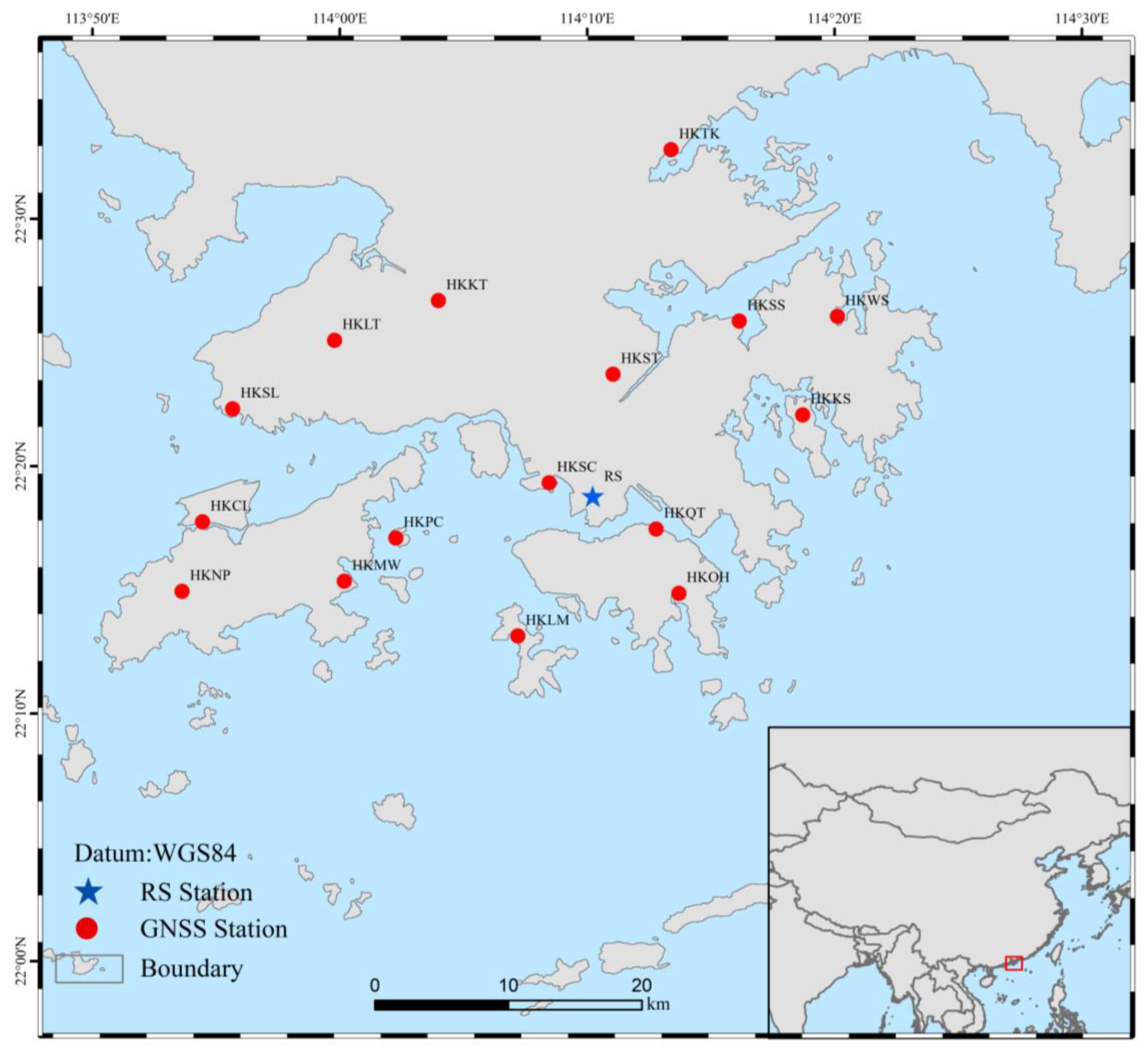
2.1. Data Sources
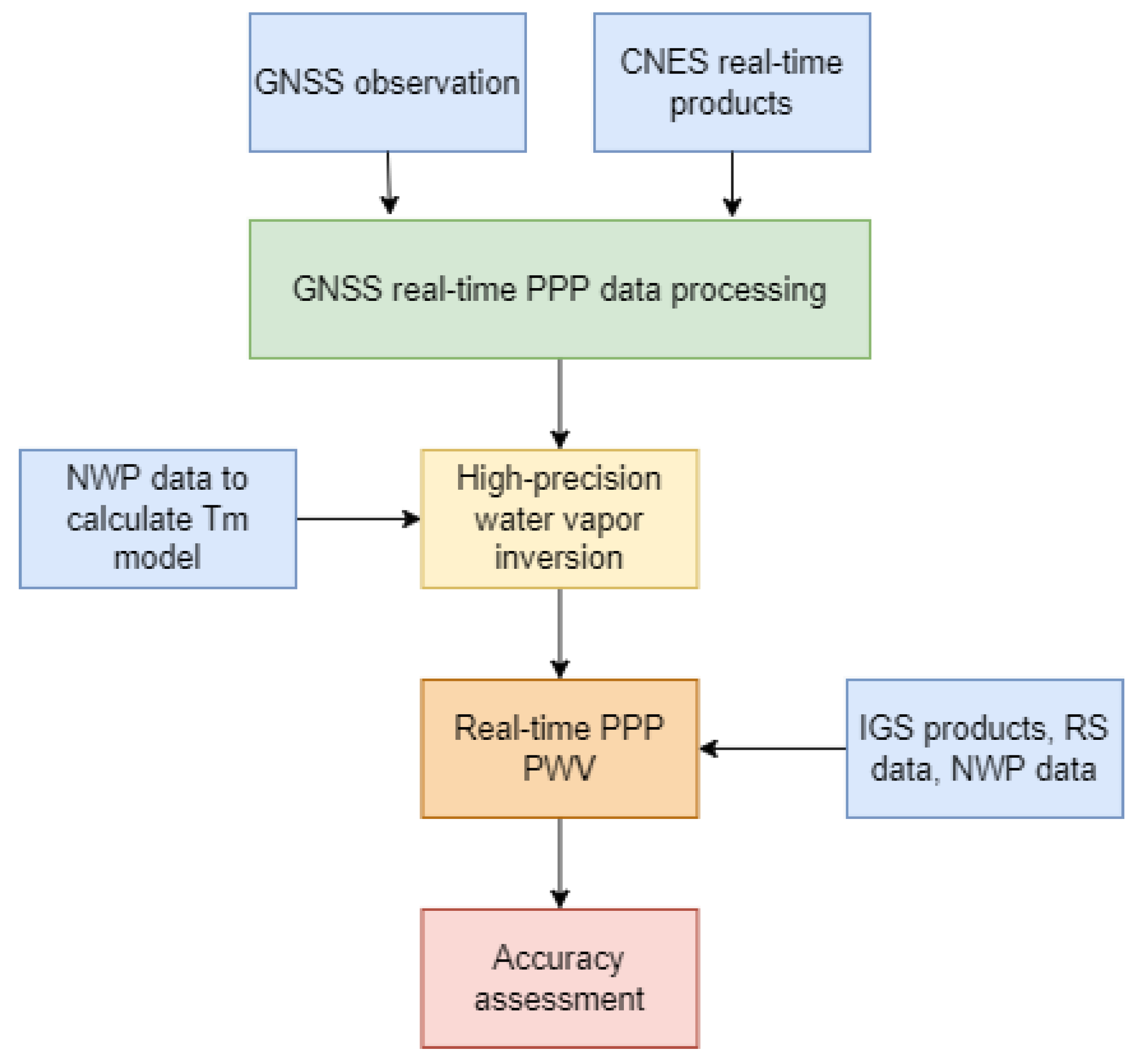
2.2. Data Processing Method
2.2.1. PPP Functional Model
2.2.2. PPP PWV Calculation Method
2.2.3. Precision Evaluation Index
3. Results
3.1. Real-Time Static PPP Accuracy Analysis
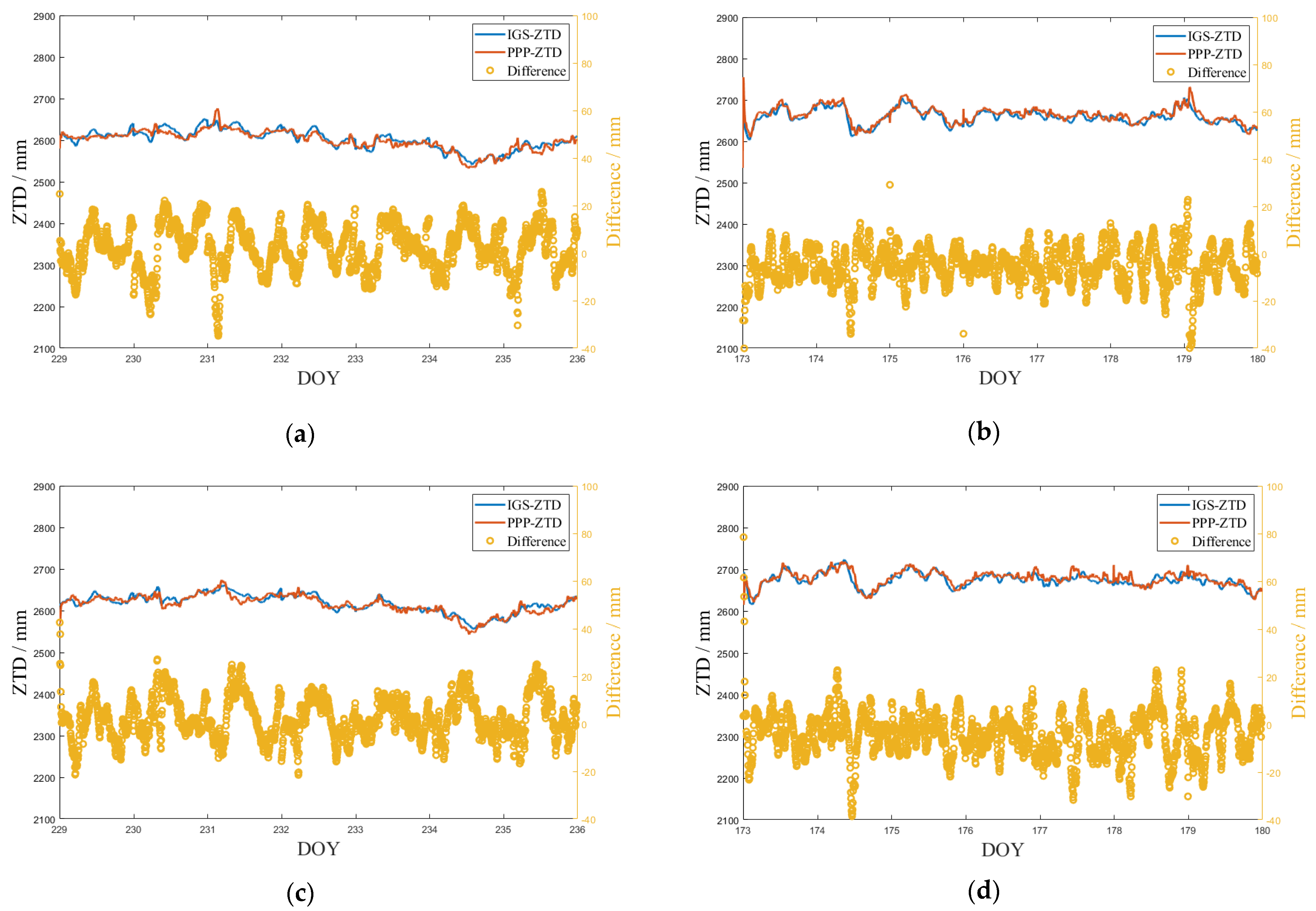
3.2. Accuracy Analysis of Real-Time PPP-Estimated ZTD
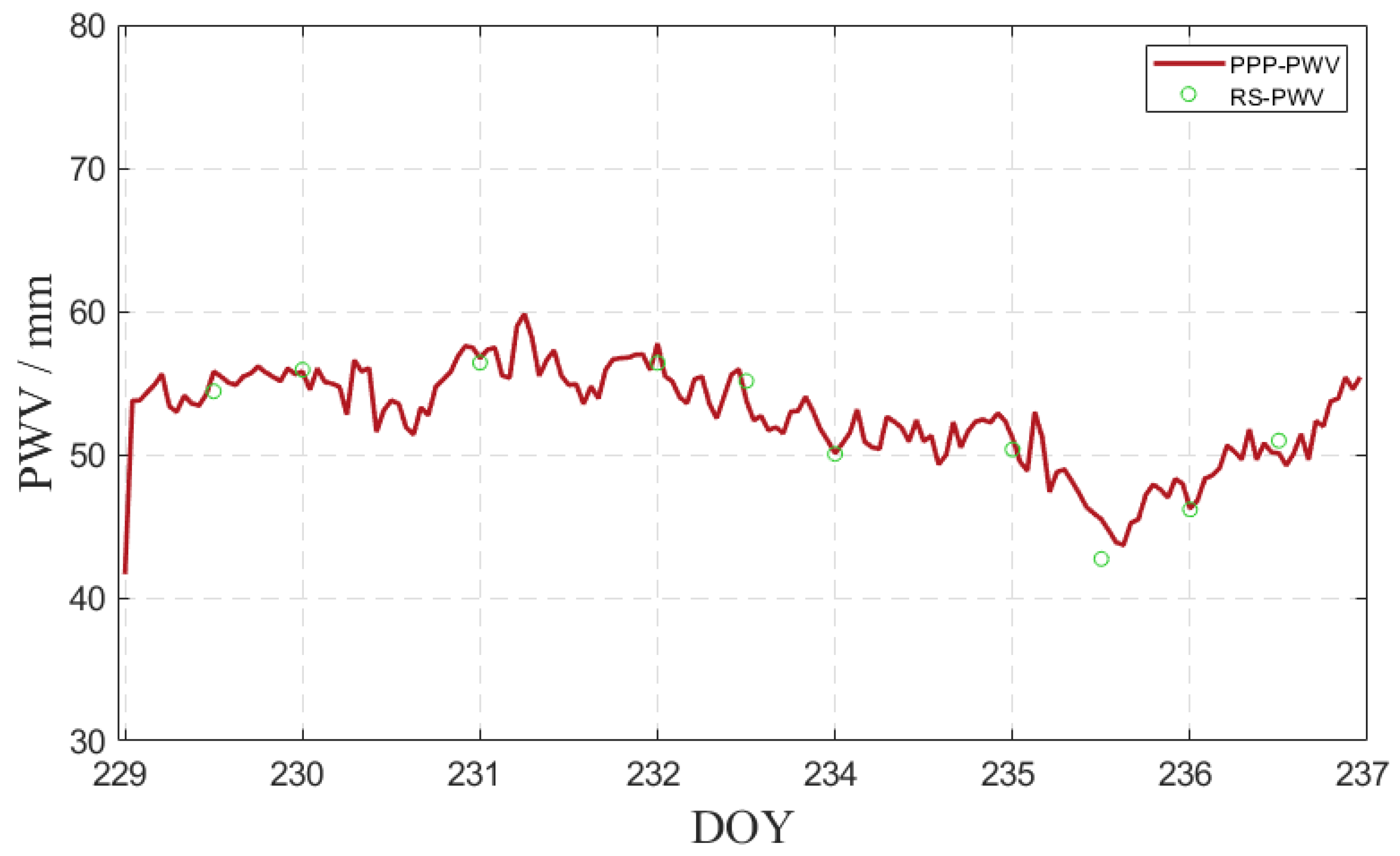
3.3. Accuracy Analysis of Real-Time PPP PWV
4. Discussion
5. Limitations and Future Direction of the Research
6. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bevis, M.; Businger, S.; Herring, T.; Rocken, C.; Anthes, R.; Ware, R. GPS Meteorology: Remote sensing of atmospheric water vapor using the global positioning system. J. Geophys. Res. Atmos. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Jin, S.G.; Luo, O.F. Variability and climatology of PWV from global 13-year GPS observations. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1918–1924. [Google Scholar] [CrossRef]
- Wang, J.H.; Zhang, L.Y.; Dai, A.G.; Hove, T.; Joel, V.B.; Wang, C. A near-global, 2-hourly data set of atmospheric precipitable water from ground-based GPS measurements. J. Geophys. Res. Atmos. 2007, 112, D11107. [Google Scholar] [CrossRef]
- Zhang, H.X.; Yuan, Y.B.; Li, W.; Ou, J.; Li, Y.; Zhang, B.C. GPS PPP-derived precipitable water vapor retrieval based on Tm/Ps from multiple sources of meteorological datasets in China. J. Geophys. Res. Atmos. 2017, 122, 4165–4183. [Google Scholar] [CrossRef]
- Bosy, J.; Rohm, W.; Borkowski, A.; Kroszczynski, K.; Figurski, M. Integration and verification of meteorological observations and NWP model data for the local GNSS tomography. Atmos. Res. 2009, 96, 522–530. [Google Scholar] [CrossRef]
- Dai, A.G.; Wang, J.H.; Ware, R.; Van Hove, T. Diurnal variation in water vapor over North America and its sampling errors in radiosonde humidity. J. Geophys. Res. Atmos. 2002, 107, D10. [Google Scholar] [CrossRef]
- Zhang, F.; Feng, P.; Xu, G.; Barriot, J.-P. Anomalous zenith total delays for an insular tropical location: The Tahiti Island case. Remote Sens. 2022, 14, 5723. [Google Scholar] [CrossRef]
- Shi, J.B.; Xu, C.Q.; Guo, J.M.; Gao, Y. Real-time GPS precise point positioning-based precipitable water vapor estimation for rainfall monitoring and forecasting. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3452–3459. [Google Scholar]
- Zumberge, J.F.; Heflin, M.; Jefferson, D.C.; Watkins, M.; Webb, F. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Li, X.X.; Ge, M.R.; Dai, X.L.; Ren, X.D.; Fritsche, M.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, Bei Dou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Zhu, J.J. Precise point positioning with quad-constellations: GPS, Bei Dou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Jin, S.; Wang, Q.; Dardanelli, G. A review on multi-GNSS for earth observation and emerging applications. Remote Sens. 2022, 14, 3930. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut. 2013, 17, 223–236. [Google Scholar] [CrossRef]
- Lou, Y.D.; Zheng, F.; Gu, S.F.; Wang, C.; Guo, H.L.; Feng, Y.M. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Liu, T.; Yuan, Y.B.; Zhang, B.C.; Wang, N.B.; Tan, B.F.; Chen, Y.C. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- Li, X.X.; Dick, G.; Ge, M.R.; Heise, S.; Wickert, J.; Bender, M. Real-time GPS sensing of atmospheric water vapor: Precise point positioning with orbit, clock, and phase delay corrections. Geophys. Res. Lett. 2014, 41, 3615–3621. [Google Scholar] [CrossRef]
- Yuan, Y.B.; Zhang, K.F.; Rohm, W.; Choy, S.; Robert, N.; Wang, C.S. Real-time retrieval of precipitable water vapor from GPS precise point positioning. J. Geophys. Res. Atmos. 2014, 119, 10043–10057. [Google Scholar] [CrossRef]
- Lu, C.X.; Chen, X.H.; Liu, G.; Dick, G.; Wickert, J.; Jiang, X.Y.; Zheng, K.; Schuh, H. Real-Time tropospheric delays retrieved from multi-GNSS observations and IGS real-time product streams. Remote Sens. 2017, 9, 1317. [Google Scholar] [CrossRef]
- Pan, L.; Guo, F. Real-time tropospheric delay retrieval with GPS, GLONASS, Galileo and BDS data. Sci. Rep. 2018, 8, 17067. [Google Scholar] [CrossRef]
- Askne, J.; Nordius, H. Estimation of tropospheric delay for microwaves from surface weather data. Radio Sci. 1987, 22, 379–386. [Google Scholar] [CrossRef]
- Gendt, G.; Dick, G.; Reigber, C.; Tomainiss, M.; Liu, Y.X.; Ramatschi, M. Near real time GPS water vapor monitoring for numerical weather prediction in germany. J. Meteorol. Soc. Jpn. 2004, 82, 361–370. [Google Scholar] [CrossRef]
- Rocken, C.; Anthes, R.; Exner, M.; Hunt, D.; Sokolovskiy, S.; Ware, R.; Gorbunov, M.; Schreiner, W.; Feng, Y.; Herman, B.; et al. Analysis and validation of GPS/MET data in the neutral atmosphere. J. Geophys. Res. Atmos. 1997, 102, 29849–29866. [Google Scholar] [CrossRef]
- Li, X.X.; Dick, G.; Lu, C.X.; Ge, M.R.; Nilsson, T.; Fritsche, M.; Wickert, J.; Schuh, H. Multi-GNSS Meteorology: Real-time retrieving of atmospheric water vapor from BeiDou, Galileo, GLONASS, and GPS observations. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6385–6393. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The international GNSS service in a changing landscape of global navigation satellite systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Wang, M.; Chai, H.Z.; Xie, K.; Chen, Y.L. PWV inversion based on CNES real-time orbits and clocks. J. Geod. Geodyn. 2013, 33, 137–140. [Google Scholar]
- Zhang, Q.; Ye, J.H.; Zhang, S.C.; Han, F. Precipitable water vapor retrieval and analysis by multiple data sources: Ground-based GNSS, radio occultation, radiosonde, microwave satellite, and NWP reanalysis data. J. Sens. 2018, 2018, 3428303. [Google Scholar] [CrossRef]
- Byun, S.H.; Bar-Sever, Y.E.; Gendt, G. The new tropospheric product of the International GNSS Service. In Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; pp. 241–249. [Google Scholar]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Boehm, J.; Heinkelmann, R.; Schuh, H. Short Note: A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Bevis, M.; Businger, S.; Chiswell, S.; Herring, T.; Anthes, R.; Rocken, C.; Ware, R. GPS Meteorology: Mapping zenith wet delays onto precipitable water. J. Appl. Meteorol. 1994, 33, 379–386. [Google Scholar] [CrossRef]
- Byun, S.H.; Bar-Sever, Y.E. A new type of troposphere zenith path delay product of the international GNSS service. J. Geod. 2009, 83, 1–7. [Google Scholar] [CrossRef]
- De, H.S. National/Regional Operational Procedures of GPS Water Vapour Networks and Agreed International Procedures; WMO/TD-No. 1340; KNMI: De Bilt, The Netherlands, 2006; p. 20. [Google Scholar]
- Chen, Q.; Song, S.; Stefan, H.; Liou, Y.H.; Zhu, W.; Zhao, J. Assessment of ZTD derived from ECMWF/NCEP data with GPS ZTD over china. GPS Solut. 2011, 15, 415–425. [Google Scholar] [CrossRef]
- Park, C.G.; Baek, J.H.; Cho, J.H. Analysis on characteristics of radiosonde bias using GPS precipitable water vapor. J. Astron. Space Sci. 2010, 27, 213–220. [Google Scholar] [CrossRef]
- Benevides, P.; Catalao, J.; Miranda, P. On the inclusion of GPS precipitable water vapour in the nowcasting of rainfall. Nat. Hazards Earth Syst. Sci. 2015, 15, 2605–2616. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, X.; Liu, M.; Wang, J.; Zhang, F.; Cui, J.; Zhou, H. Spatial-temporal relationship study between NWP PWV and precipitation: A case study of ‘July 20′ heavy rainstorm in Zhengzhou. Remote Sens. 2022, 14, 3636. [Google Scholar] [CrossRef]
- Zhao, L.; Cui, M.; Song, J. An improved strategy for real-time troposphere estimation and its application in the severe weather event monitoring. Atmosphere 2023, 14, 46. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station | Latitude (°) | Longitude (°) | Antenna |
|---|---|---|---|
| HKCL | 22.2958 | 113.9077 | TRM59800.00 |
| HKFN | 22.4946 | 114.1381 | LEIAT504 |
| HKKT | 22.3678 | 114.3119 | TRM59800.00 |
| HKKS | 22.4449 | 114.0665 | LEIAR25.R4 |
| HKLM | 22.2189 | 114.1200 | TRM59800.00 |
| HKLT | 22.4181 | 113.9966 | LEIAR25.R4 |
| HKMW | 22.2558 | 114.0031 | LEIAR25.R4 |
| HKNP | 22.2490 | 113.8938 | LEIAR25.R4 |
| HKOH | 22.2476 | 114.2285 | LEIAR25.R4 |
| HKPC | 22.2849 | 114.0378 | LEIAR25.R4 |
| HKQT | 22.2910 | 114.2132 | TRM59800.00 |
| HKSC | 22.3222 | 114.1411 | LEIAR25.R4 |
| HKSL | 22.3720 | 113.9279 | LEIAR25.R4 |
| HKSS | 22.4310 | 114.2693 | LEIAR25.R4 |
| HKST | 22.3952 | 114.1842 | LEIAR25.R4 |
| HKTK | 22.5465 | 114.2232 | TRM59800.00 |
| HKWS | 22.4342 | 114.3353 | LEIAR25.R4 |
| T430 | 22.4947 | 114.1382 | TRM59800.00 |
| Observation | Combination of observation | IF |
| Elevation mask angle | 10° | |
| Stochastic model | Elevation weighting | |
| Error correction | Phase wrapping | Correction |
| Phase center variation | Igs14.atx | |
| Atmospheric loading | Leave out | |
| Tide correction | Solid tide, polar tide, and ocean tide | |
| Relativistic correction | Correction | |
| Tropospheric delay | Parameter estimation | |
| Parameter estimation | Tropospheric mapping function | NMF |
| Site coordinates | Constant | |
| Station receiver clock error | White noise | |
| Ambiguity | Float ambiguity | |
| Filtering method | Extended Kalman filter |
| Station | E (cm) | N (cm) | U (cm) | Convergence Time (min) | E (cm) | N (cm) | U (cm) | Convergence Time (min) |
|---|---|---|---|---|---|---|---|---|
| During Rainfall | During Nonrainfall | |||||||
| HKSL | 1.94 | 0.77 | 2.34 | 47 | 1.38 | 0.88 | 1.88 | 37.5 |
| HKWS | 1.43 | 0.83 | 2.4 | 78 | 1.31 | 0.83 | 2.06 | 33 |
| Station | E (cm) | N (cm) | U (cm) | Convergence Time (min) | E (cm) | N (cm) | U (cm) | Convergence Time (min) |
|---|---|---|---|---|---|---|---|---|
| During Rainfall | During Nonrainfall | |||||||
| HKSL | 1.77 | 0.83 | 2.59 | 38 | 1.35 | 0.86 | 1.71 | 34 |
| HKWS | 1.19 | 0.57 | 2.13 | 50.5 | 1.06 | 0.87 | 1.43 | 28 |
| Station | Bias (mm) | STDEV (mm) | RMS (mm) | Bias (mm) | STDEV (mm) | RMS (mm) |
|---|---|---|---|---|---|---|
| During Rainfall | During Nonrainfall | |||||
| HKSL | 5.43 | 9.14 | 10.52 | 2.1 | 9.72 | 9.91 |
| HKWS | 4.08 | 8.91 | 9.88 | 2.42 | 8.85 | 9.13 |
| Station | Bias (mm) | STDEV (mm) | RMS (mm) | Bias (mm) | STDEV (mm) | RMS (mm) |
|---|---|---|---|---|---|---|
| During Rainfall | During Nonrainfall | |||||
| HKCL | 12.02 | 18.24 | 15.47 | 8.84 | 14.57 | 11.42 |
| HKFN | 13.23 | 17.75 | 16.85 | 9.06 | 13.44 | 12.25 |
| HKKS | 12.24 | 20.65 | 15.86 | 9.32 | 14.35 | 12.07 |
| HKKT | 12.07 | 17.66 | 15.21 | 8.44 | 12.23 | 11.35 |
| HKLM | 10.74 | 18.64 | 14.15 | 9.08 | 15.91 | 11.36 |
| HKLT | 12.95 | 17.37 | 16.66 | 8.54 | 11.58 | 10.83 |
| HKMW | 15.66 | 18.65 | 19.14 | 14.29 | 11.05 | 17.24 |
| HKNP | 10.11 | 13.96 | 13.08 | 9.14 | 11.27 | 11.75 |
| HKOH | 15.25 | 19.37 | 18.67 | 9.26 | 11.16 | 11.56 |
| HKPC | 11.53 | 16.74 | 14.74 | 7.84 | 9.94 | 9.91 |
| HKQT | 14.17 | 22.36 | 17.95 | 8.36 | 12.83 | 10.82 |
| HKSC | 11.88 | 18.19 | 14.66 | 8.15 | 11.54 | 10.05 |
| HKSS | 13.02 | 18.74 | 16.74 | 8.55 | 13.01 | 11.35 |
| HKST | 12.64 | 16.55 | 15.55 | 8.64 | 10.83 | 10.92 |
| HKTK | 13.76 | 22.06 | 17.46 | 10.95 | 15.45 | 14.66 |
| T430 | 13.12 | 17.83 | 16.97 | 9.06 | 12.81 | 12.24 |
| Station | Bias (mm) | STDEV (mm) | RMS (mm) | Bias (mm) | STDEV (mm) | RMS (mm) |
|---|---|---|---|---|---|---|
| During Rainfall | During Nonrainfall | |||||
| HKSC | 3.45 | 1.79 | 3.85 | 0.93 | 1.21 | 1.18 |
| Station | Bias (mm) | STDEV (mm) | RMS (mm) | Bias (mm) | STDEV (mm) | RMS (mm) |
|---|---|---|---|---|---|---|
| During Rainfall | During Nonrainfall | |||||
| HKCL | 1.89 | 2.87 | 2.43 | 1.4 | 2.3 | 1.81 |
| HKFN | 2.09 | 2.79 | 2.65 | 1.42 | 2.12 | 1.93 |
| HKKS | 1.93 | 2.51 | 2.5 | 1.47 | 2.1 | 1.9 |
| HKKT | 1.93 | 3.25 | 2.5 | 1.47 | 2.27 | 1.9 |
| HKLM | 1.89 | 2.78 | 2.4 | 1.33 | 1.93 | 1.79 |
| HKLT | 1.7 | 2.93 | 2.22 | 1.42 | 2.53 | 1.78 |
| HKMW | 2.03 | 2.73 | 2.62 | 1.34 | 1.81 | 1.72 |
| HKNP | 2.45 | 2.93 | 3.01 | 2.24 | 1.74 | 2.71 |
| HKOH | 1.59 | 2.19 | 2.04 | 1.42 | 1.77 | 1.83 |
| HKPC | 2.39 | 3.04 | 2.92 | 1.45 | 1.76 | 1.82 |
| HKQT | 1.82 | 2.64 | 2.32 | 1.24 | 1.57 | 1.56 |
| HKSL | 2.23 | 3.52 | 2.84 | 1.32 | 2.03 | 1.71 |
| HKSS | 1.89 | 2.68 | 2.37 | 1.33 | 1.85 | 1.77 |
| HKST | 2.06 | 2.95 | 2.64 | 1.35 | 2.06 | 1.79 |
| HKTK | 1.97 | 2.59 | 2.44 | 1.36 | 1.7 | 1.72 |
| HKWS | 2.16 | 3.48 | 2.75 | 1.73 | 2.44 | 2.31 |
| T430 | 2.21 | 3.05 | 2.79 | 1.53 | 1.89 | 2.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Ma, L.; Zhang, F.; Chen, X.; Yang, Z. Accuracy Analysis of Real-Time Precise Point Positioning—Estimated Precipitable Water Vapor under Different Meteorological Conditions: A Case Study in Hong Kong. Atmosphere 2023, 14, 650. https://doi.org/10.3390/atmos14040650
Xu Y, Ma L, Zhang F, Chen X, Yang Z. Accuracy Analysis of Real-Time Precise Point Positioning—Estimated Precipitable Water Vapor under Different Meteorological Conditions: A Case Study in Hong Kong. Atmosphere. 2023; 14(4):650. https://doi.org/10.3390/atmos14040650
Chicago/Turabian StyleXu, Ying, Lin Ma, Fangzhao Zhang, Xin Chen, and Zaozao Yang. 2023. "Accuracy Analysis of Real-Time Precise Point Positioning—Estimated Precipitable Water Vapor under Different Meteorological Conditions: A Case Study in Hong Kong" Atmosphere 14, no. 4: 650. https://doi.org/10.3390/atmos14040650
APA StyleXu, Y., Ma, L., Zhang, F., Chen, X., & Yang, Z. (2023). Accuracy Analysis of Real-Time Precise Point Positioning—Estimated Precipitable Water Vapor under Different Meteorological Conditions: A Case Study in Hong Kong. Atmosphere, 14(4), 650. https://doi.org/10.3390/atmos14040650