Predicting and Reconstructing Aerosol–Cloud–Precipitation Interactions with Physics-Informed Neural Networks



Abstract
:1. Introduction
1.1. Aerosol–Cloud–Precipitation System
1.2. Artificial Neural Network and Physics-Informed Neural Networks
1.3. Goals
2. Materials and Methods
2.1. The Simple Conceptual Model for the Aerosol–Cloud–Precipitation System
2.2. Adding External Forcing to the Koren–Feingold Model
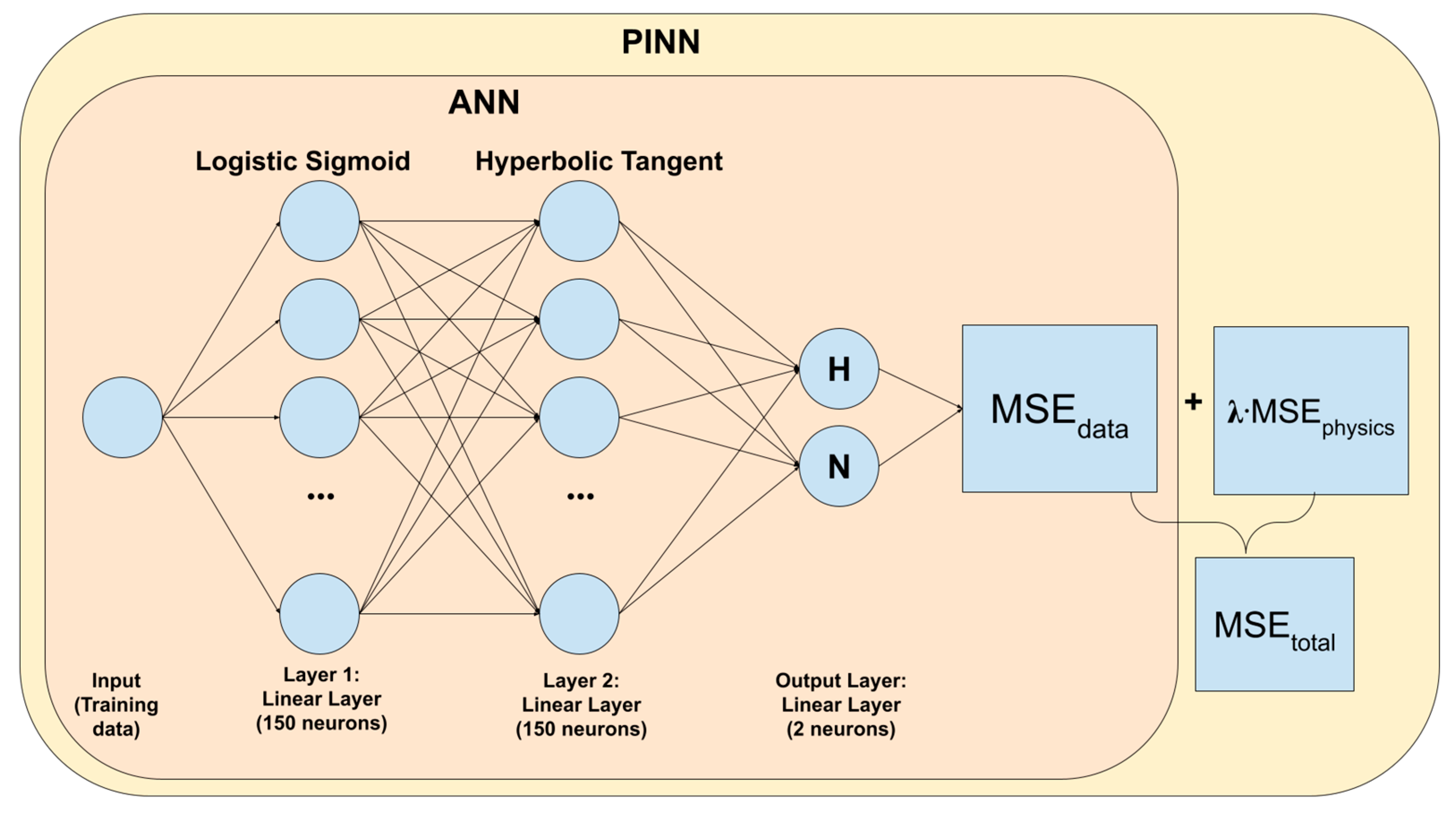
2.3. Artificial Neural Networks (ANNs) and Mean Squared Error (MSE) Loss
2.4. Physics-Informed Neural Networks (PINNs) and Physics Loss
2.5. Description of Neural Network Structure and Training
2.6. Evaluation of Predictions and Reconstructions
3. Results
3.1. Experiments without External Forcing
3.1.1. Predicting the Future
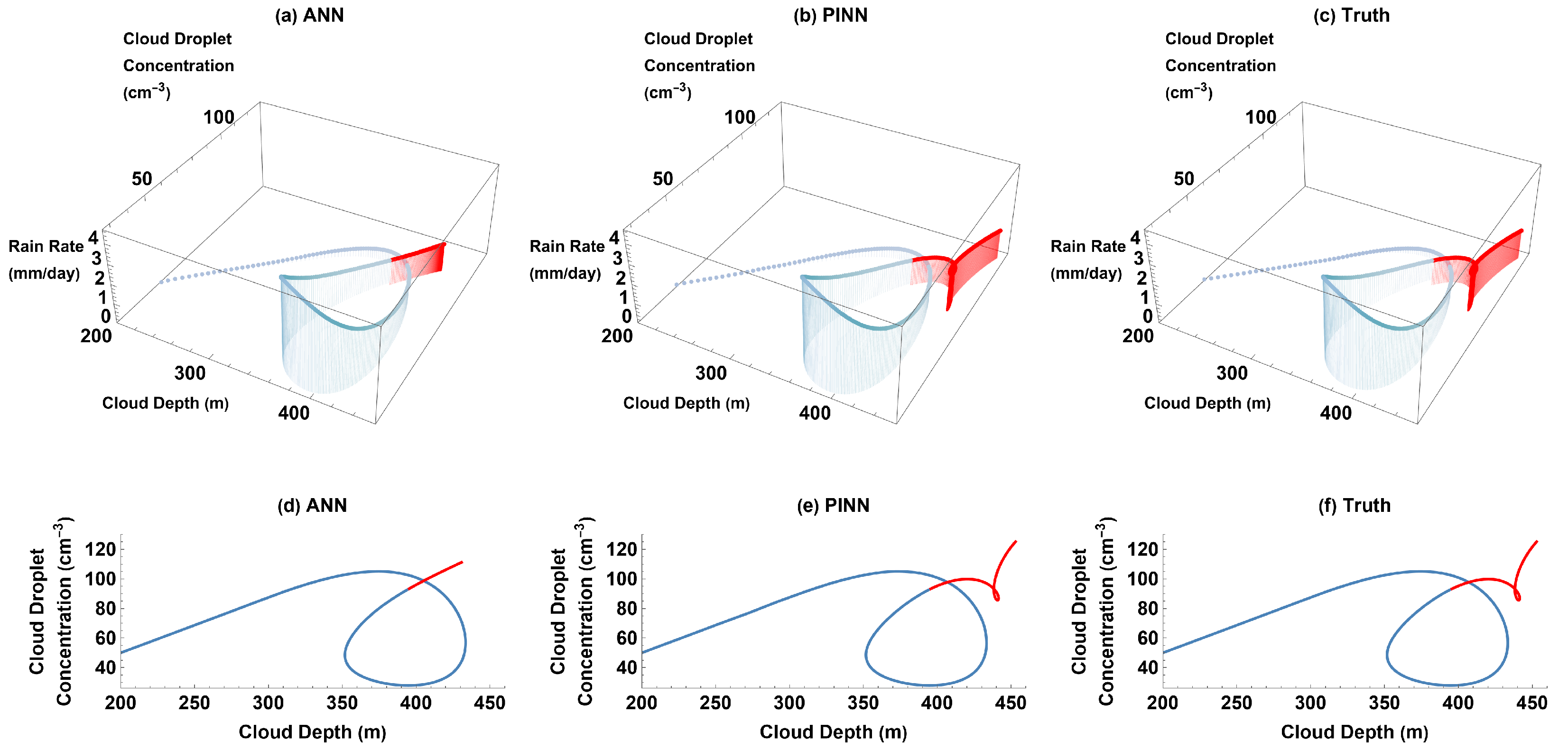
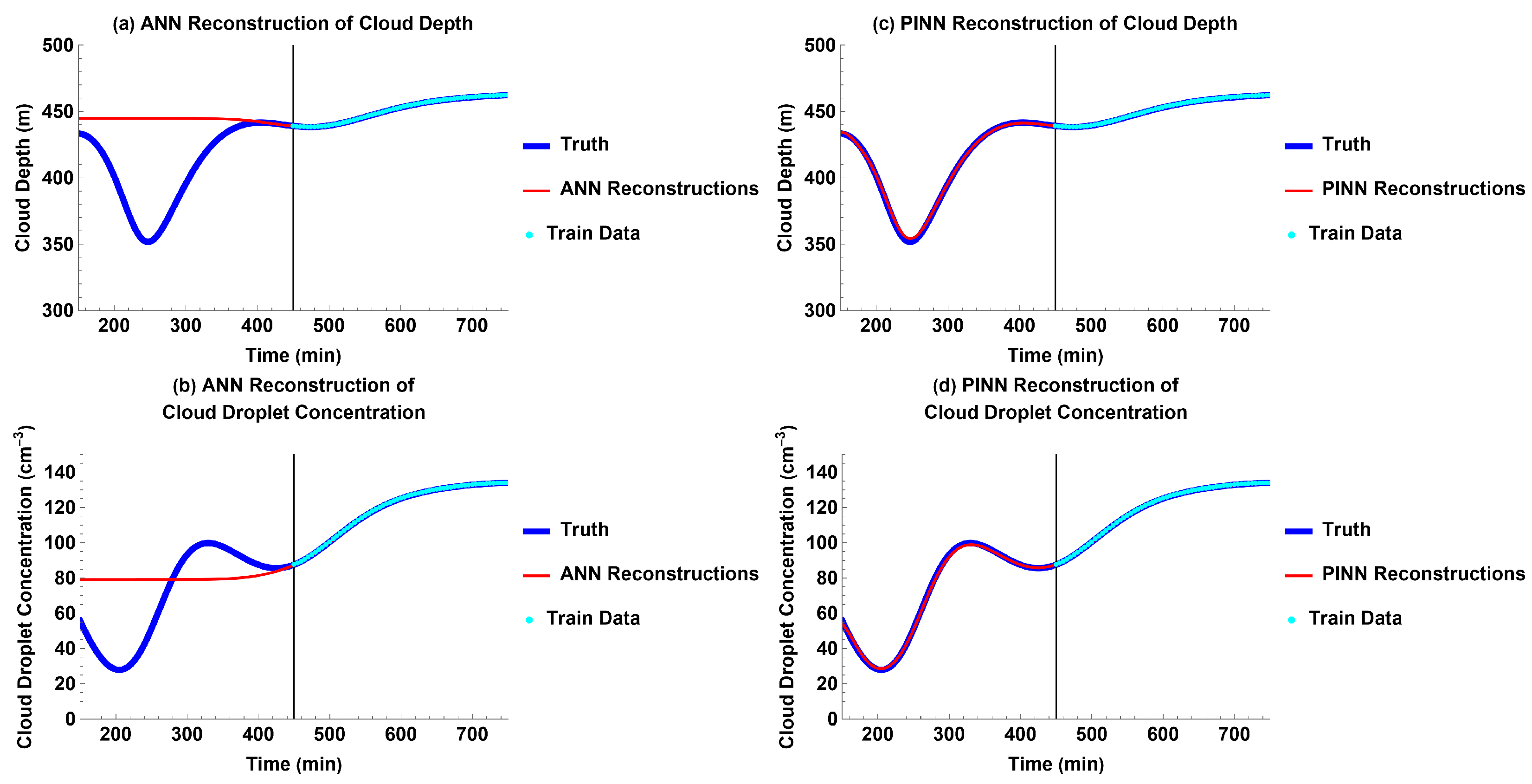
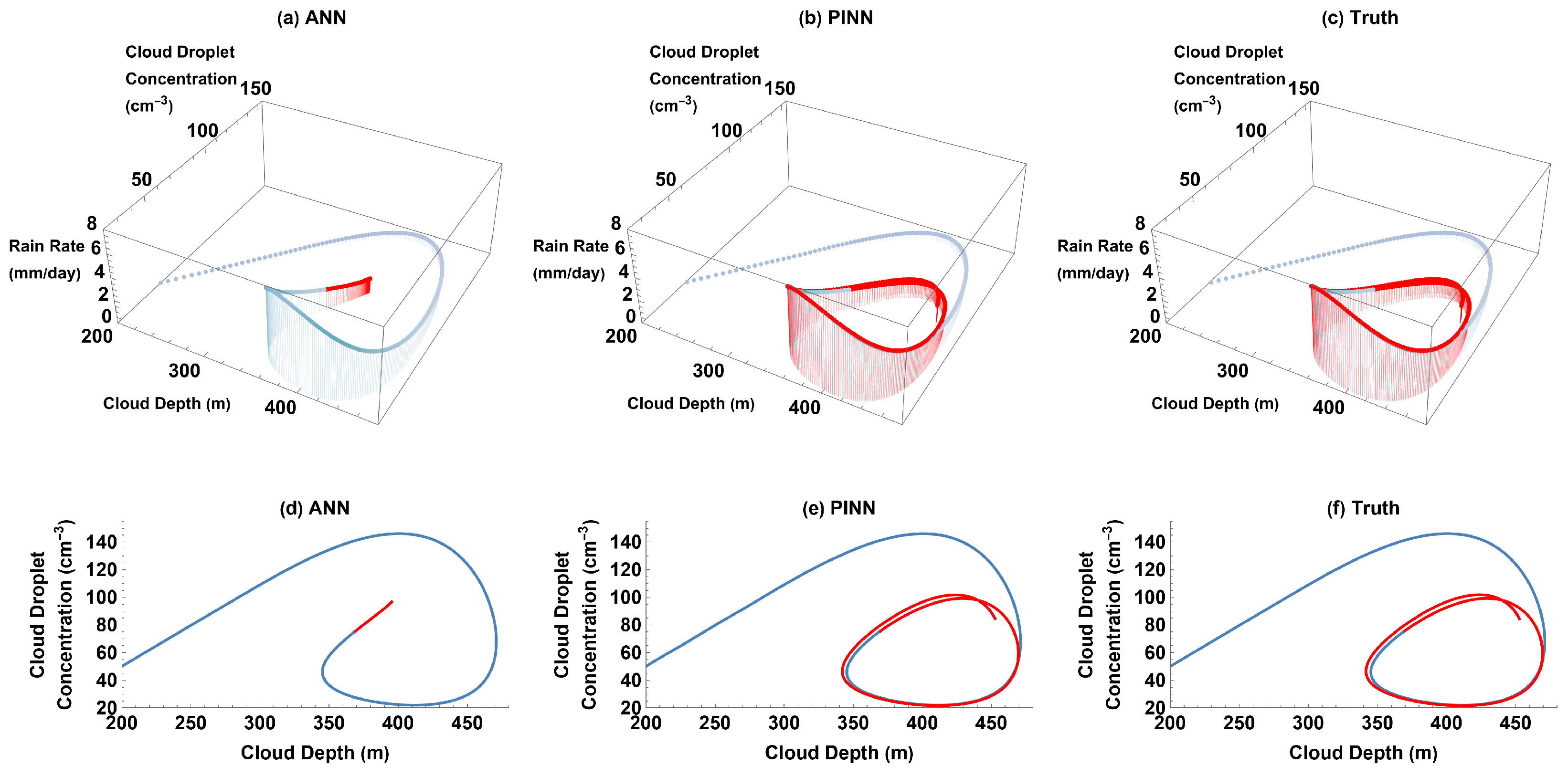
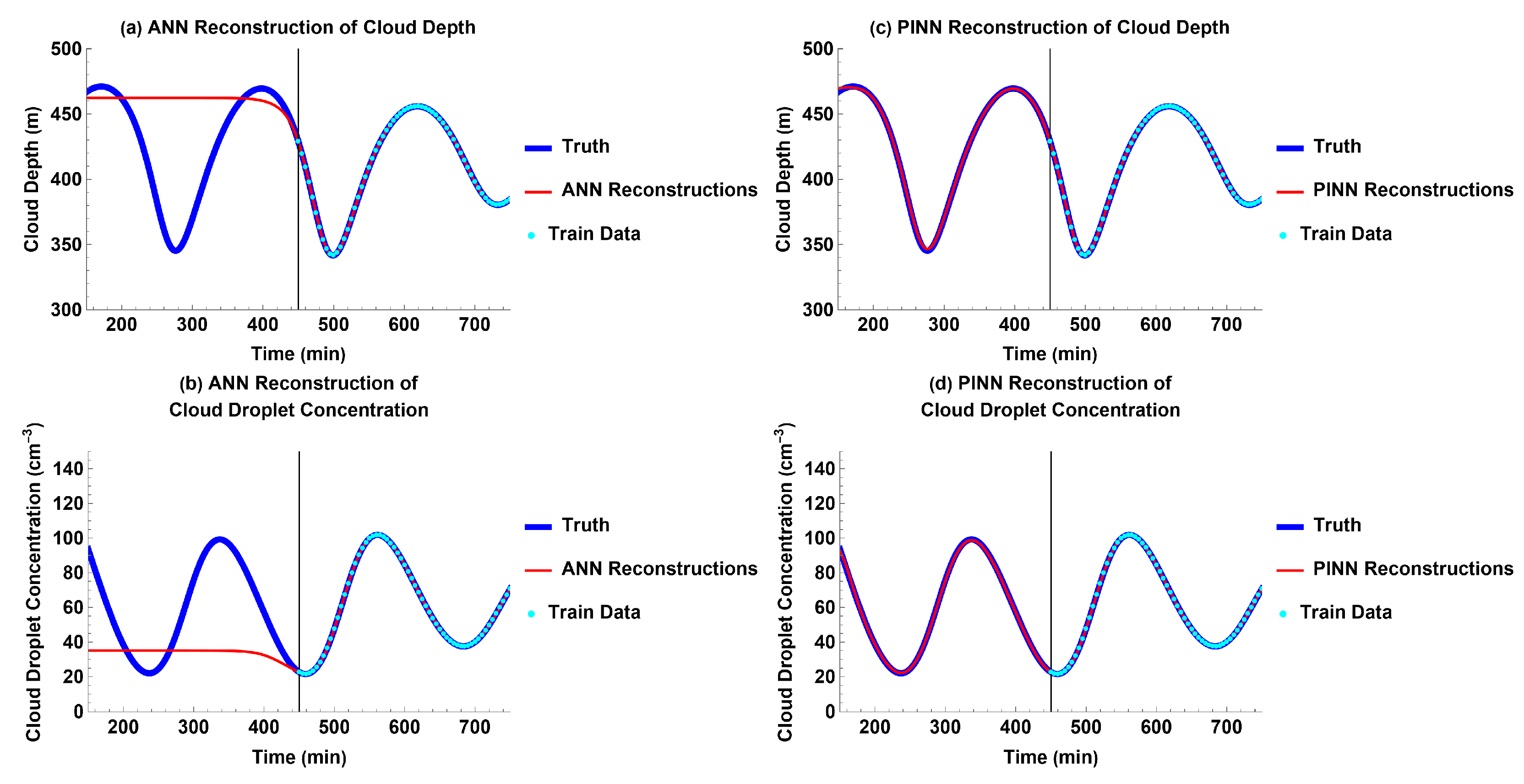
3.1.2. Reconstructing the Past
3.2. External Forcing Representing Increase in Aerosol Due to Wildfire
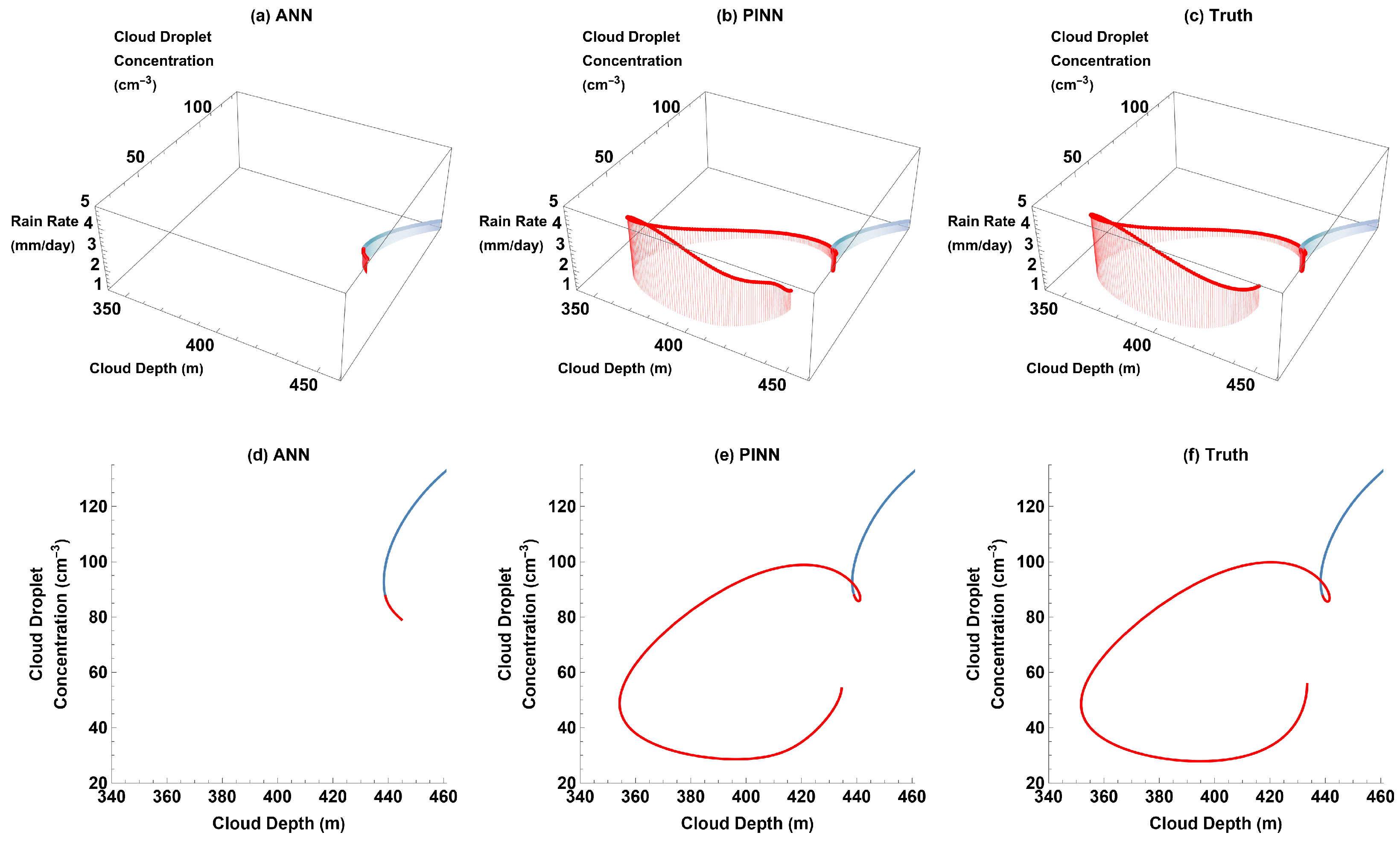
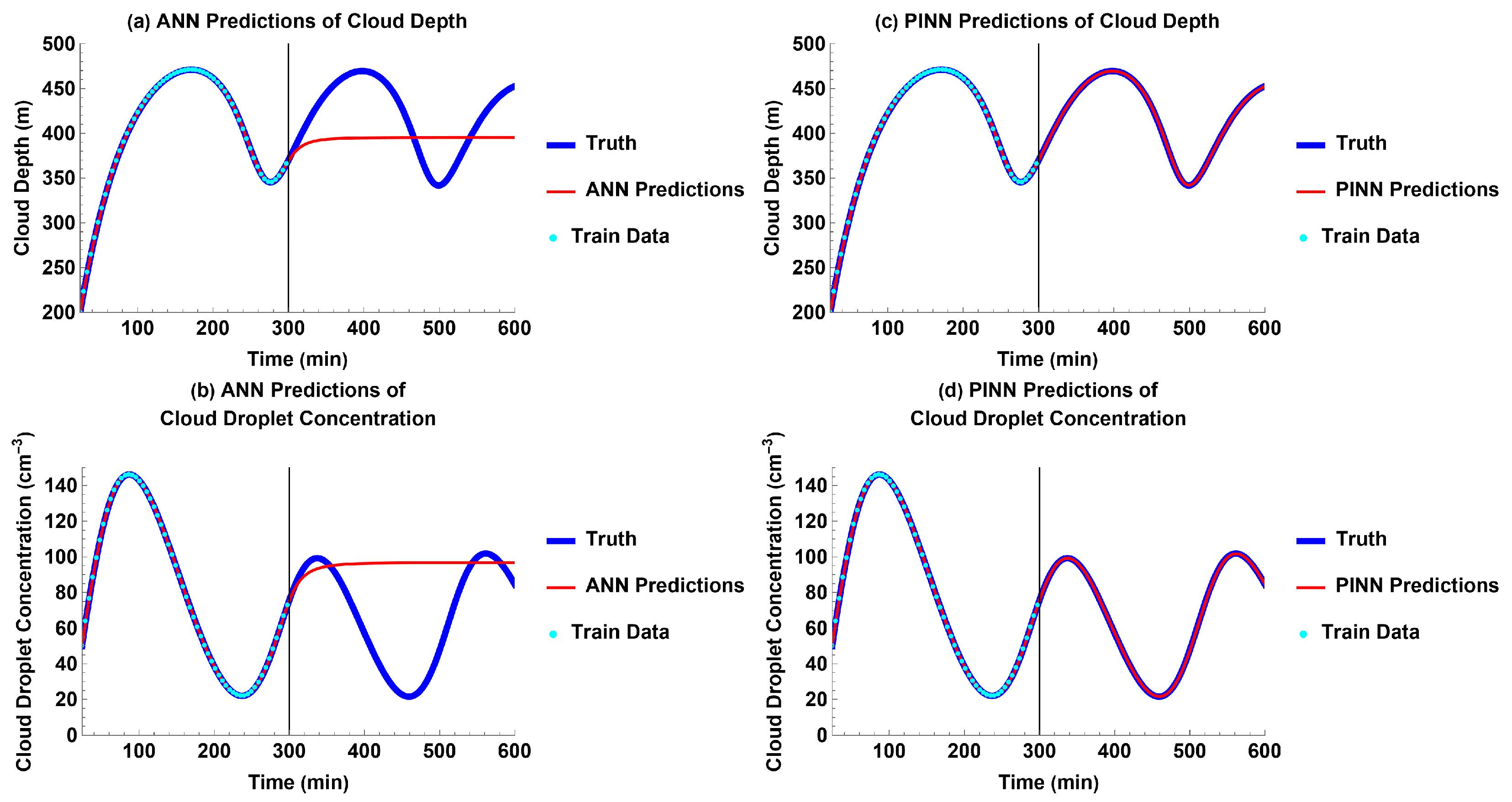
3.2.1. Predicting the Future
3.2.2. Reconstructing the Past
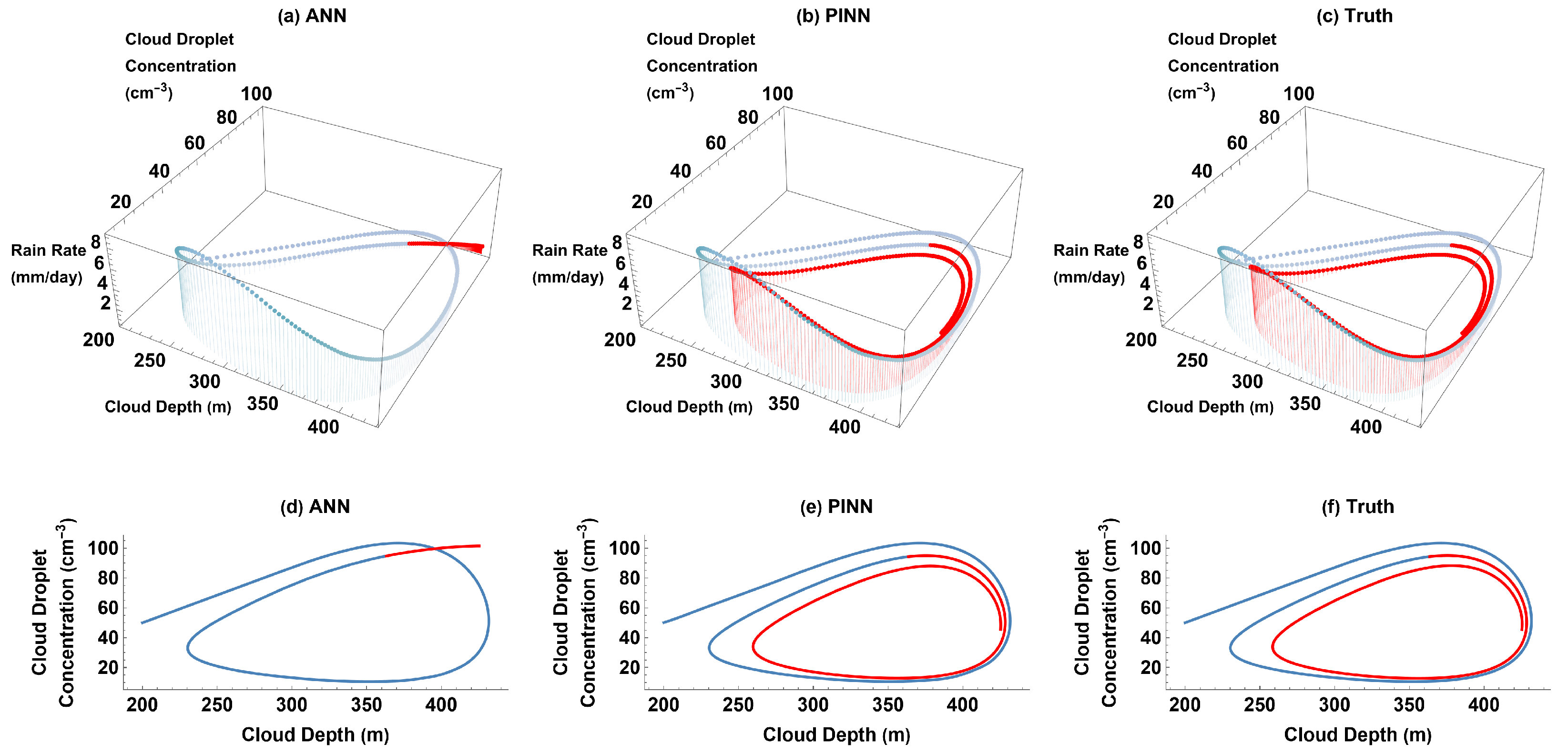
3.3. External Forcing Representing the Diurnal Cycle in Cloud Depth
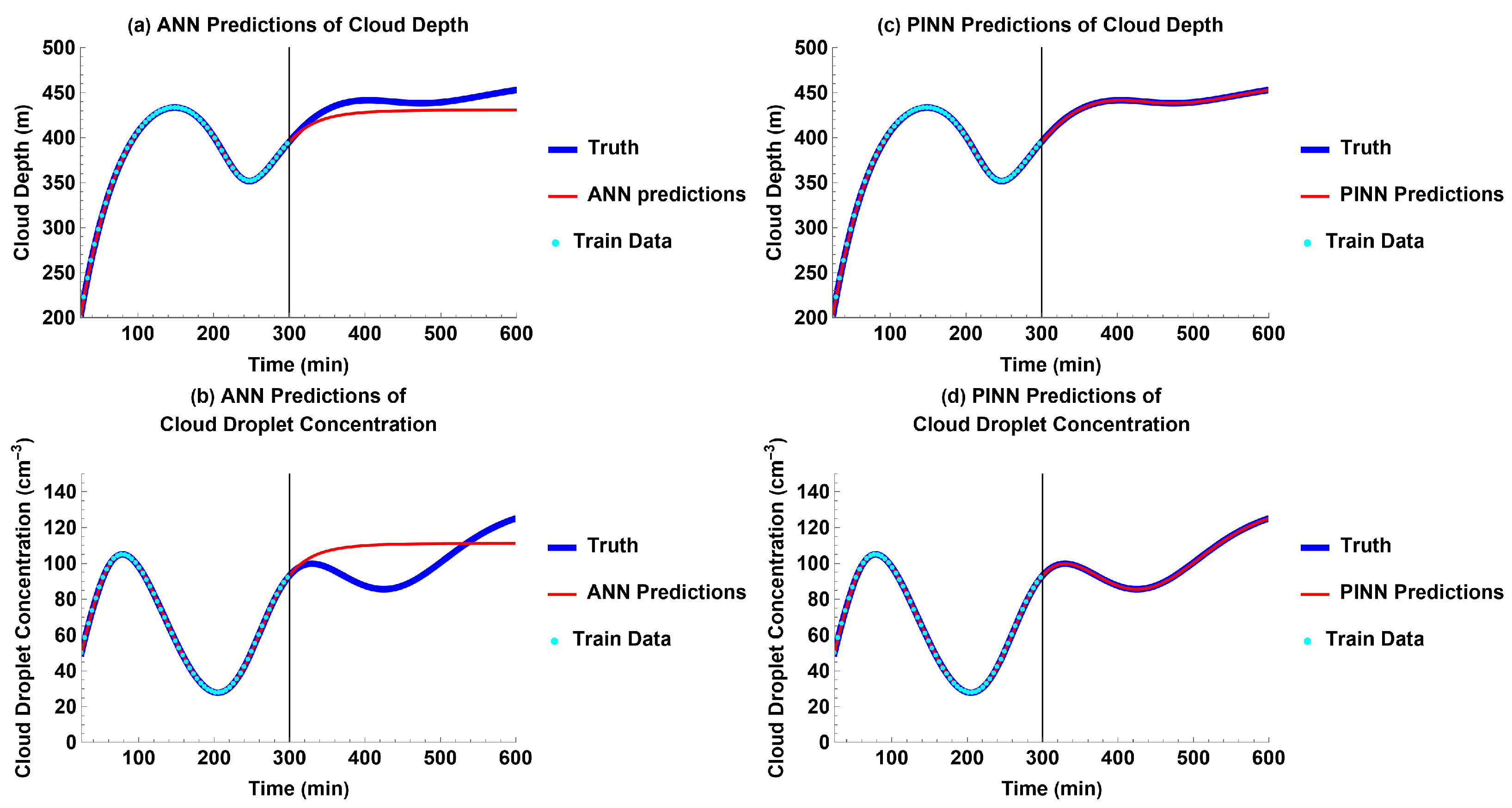
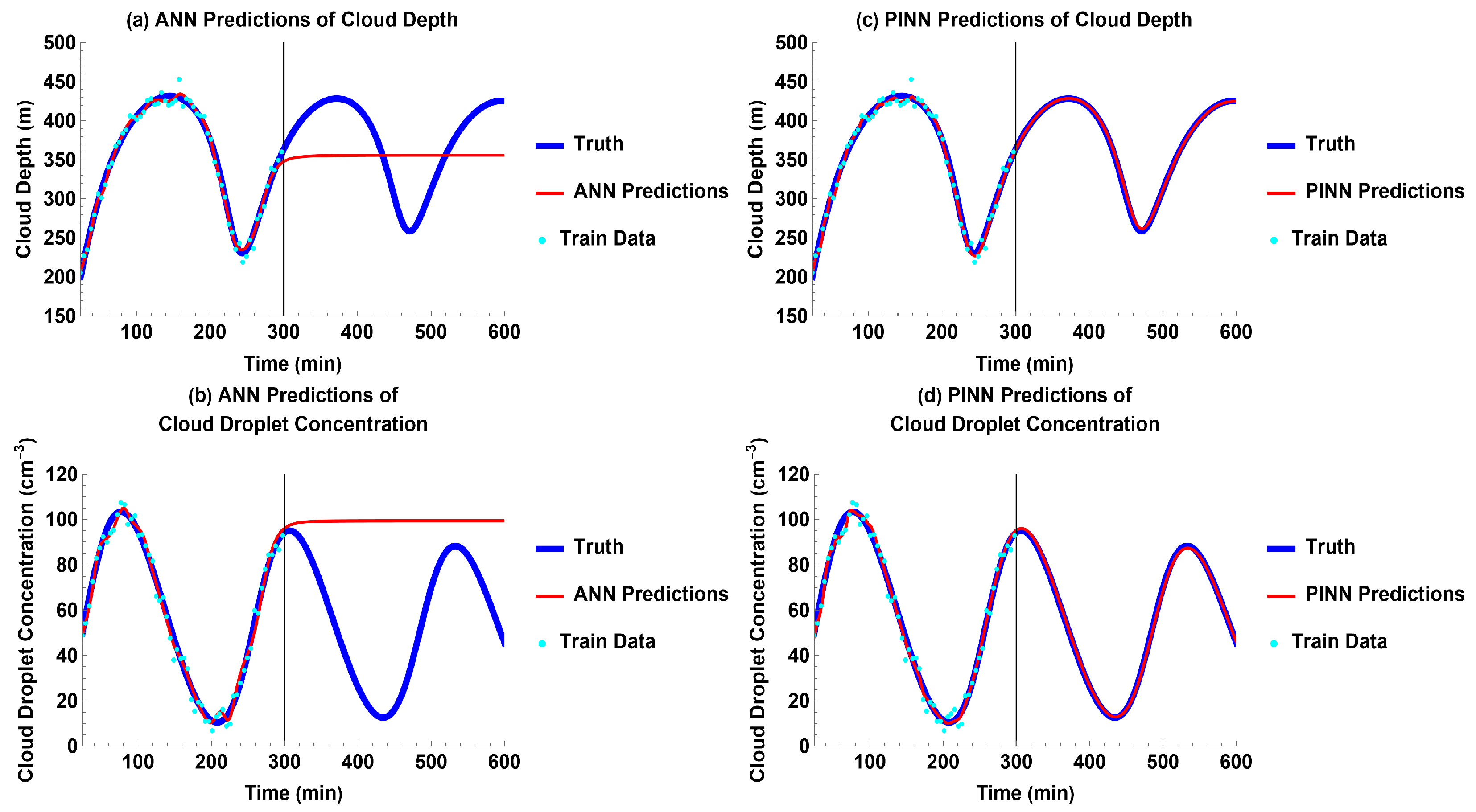
3.3.1. Predicting the Future
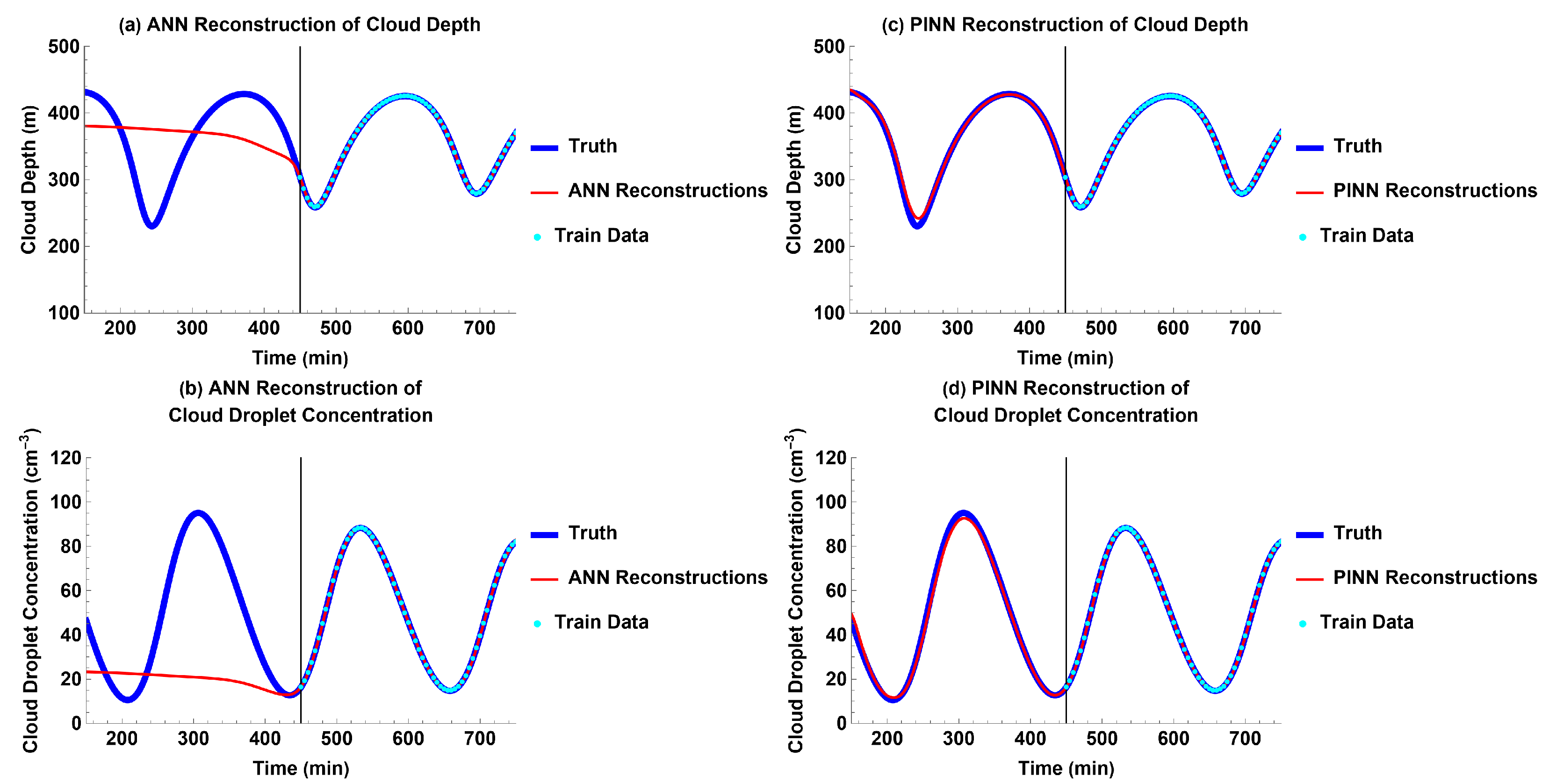
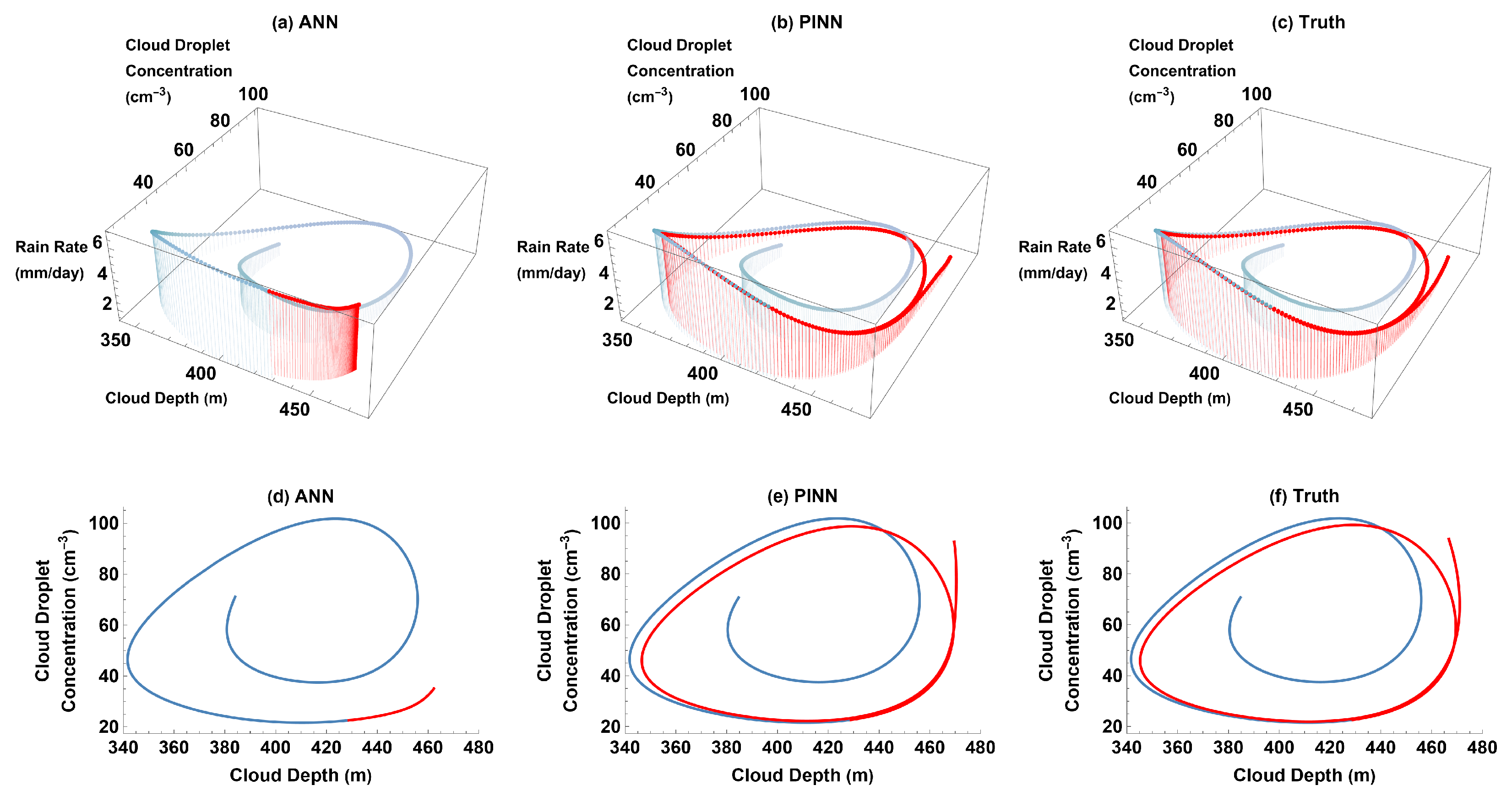
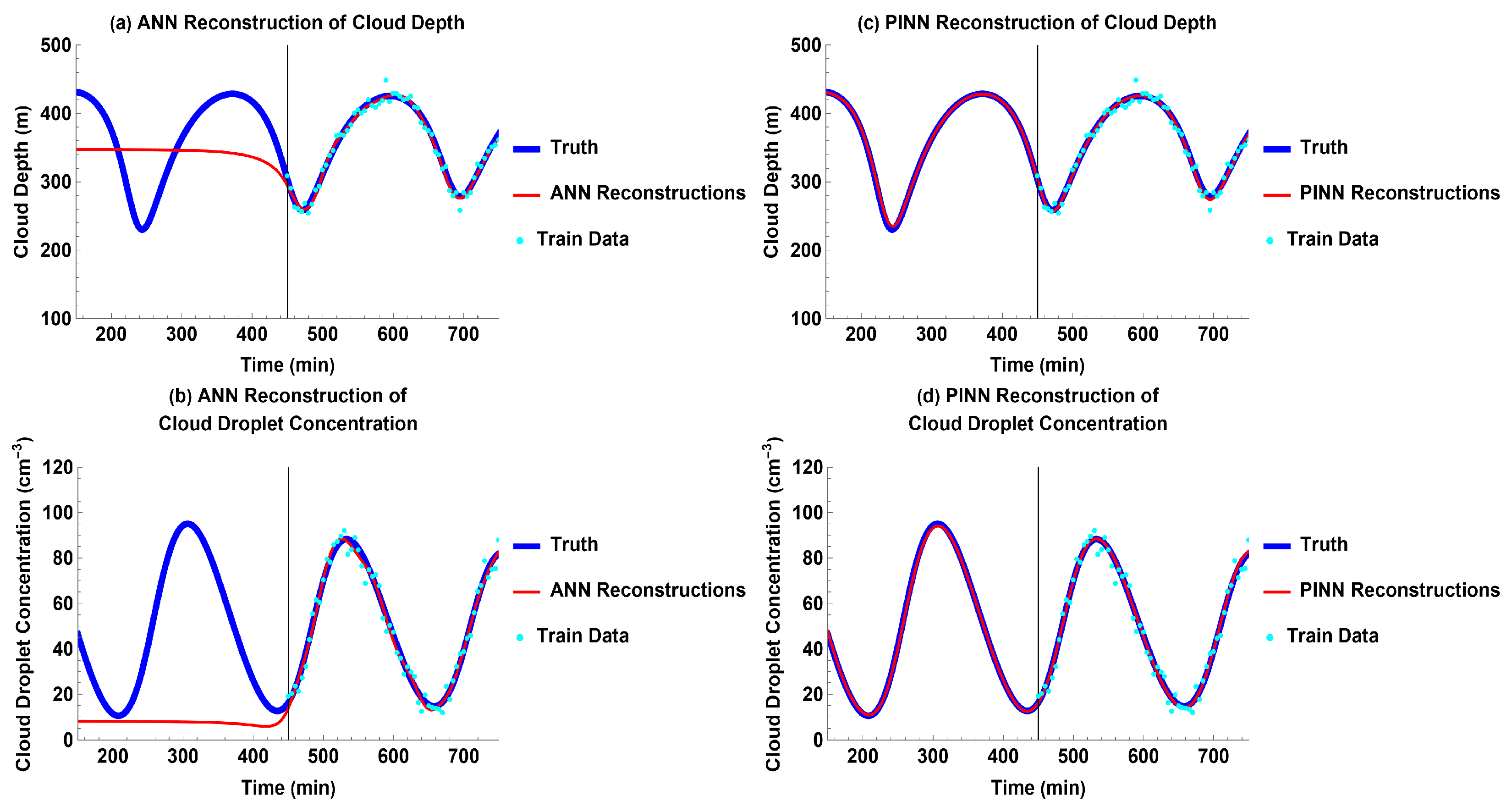
3.3.2. Reconstructing the Past
3.4. Mean Squared Error Loss and Physics Mean Squared Error Loss for All Predictions and Reconstructions
3.5. Sensitivity of PINN to the Regularization Factor of Physics Loss
3.6. Sensitivity of ANN and PINN to Random Noise Added to the Training Data
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koren, I.; Feingold, G. Aerosol-cloud-precipitation system as a predator-prey problem. Proc. Natl. Acad. Sci. USA 2011, 108, 12227–12232. [Google Scholar] [CrossRef] [PubMed]
- Fu, H.; Lin, Y. A kinematic model for understanding rain formation efficiency of a convective cell. J. Adv. Model. Earth Syst. 2019, 11, 4395–4422. [Google Scholar] [CrossRef]
- Pujol, O.; Jensen, A. Cloud–rain predator–prey interactions: Analyzing some properties of the Koren–Feingold model and introduction of a new species-competition bulk system with a Hopf bifurcation. Phys. D Nonlinear Phenom. 2019, 399, 86–94. [Google Scholar] [CrossRef]
- Mülmenstädt, J.; Feingold, G. The radiative forcing of aerosol–cloud interactions in liquid clouds: Wrestling and embracing uncertainty. Curr. Clim. Chang. Rep. 2018, 4, 23–40. [Google Scholar] [CrossRef]
- Goren, T.; Feingold, G.; Gryspeerdt, E.; Kazil, J.; Kretzschmar, J.; Jia, H.; Quaas, J. Projecting stratocumulus transitions on the albedo—Cloud fraction relationship reveals linearity of albedo to droplet concentrations. Geophys. Res. Lett. 2022, 49, e2022GL101169. [Google Scholar] [CrossRef]
- Twomey, S. The influence of pollution on the shortwave albedo of clouds. J. Atmos. Sci. 1977, 34, 1149–1152. [Google Scholar] [CrossRef]
- Berhane, S.A.; Bu, L. Aerosol—Cloud interaction with summer precipitation over major cities in Eritrea. Remote Sens. 2021, 13, 677. [Google Scholar] [CrossRef]
- Lunderman, S.; Morzfeld, M.; Glassmeier, F.; Feingold, G. Estimating parameters of the nonlinear cloud and rain equation from a large-eddy simulation. Phys. D Nonlinear Phenom. 2020, 410, 132500. [Google Scholar] [CrossRef]
- Barnaba, F.; Angelini, F.; Curci, G.; Gobbi, G.P. An important fingerprint of wildfires on the European aerosol load. Atmos. Chem. Phys. 2011, 11, 10487–10501. [Google Scholar] [CrossRef]
- Hallar, A.G.; Molotch, N.P.; Hand, J.L.; Livneh, B.; McCubbin, I.B.; Petersen, R.; Kunkel, K.E. Impacts of increasing aridity and wildfires on aerosol loading in the intermountain Western US. Environ. Res. Lett. 2017, 12, 014006. [Google Scholar] [CrossRef]
- Jahl, L.G.; Brubaker, T.A.; Polen, M.J.; Jahn, L.G.; Cain, K.P.; Bowers, B.B.; Sullivan, R.C. Atmospheric aging enhances the ice nucleation ability of biomass-burning aerosol. Sci. Adv. 2021, 7, eabd3440. [Google Scholar] [CrossRef] [PubMed]
- Battula, S.B.; Siems, S.; Mondal, A.; Ghosh, S. Aerosol-heavy precipitation relationship within monsoonal regimes in the Western Himalayas. Atmos. Res. 2023, 288, 106728. [Google Scholar] [CrossRef]
- Liu, J.; Zhu, Y.; Wang, M.; Rosenfeld, D.; Cao, Y. Marine warm cloud fraction decreases monotonically with rain rate for fixed vertical and horizontal cloud sizes. Geophys. Res. Lett. 2023, 50, e2022GL101680. [Google Scholar] [CrossRef]
- Sharma, P.; Ganguly, D.; Sharma, A.K.; Kant, S.; Mishra, S. Assessing the aerosols, clouds and their relationship over the northern Bay of Bengal using a global climate model. Earth Space Sci. 2023, 10, e2022EA002706. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, S.J.; Kalashnikova, O.; Tosca, M.; Kim, S.W.; Kug, J.S. Characterization of wildfire-induced aerosol emissions from the Maritime Continent peatland and Central African dry savannah with MISR and CALIPSO aerosol products. J. Geophys. Res. Atmos. 2018, 123, 3116–3125. [Google Scholar] [CrossRef]
- Rozendaal, M.A.; Leovy, C.B.; Klein, S.A. An observational study of diurnal variations of marine stratiform cloud. J. Clim. 1995, 8, 1795–1809. [Google Scholar] [CrossRef]
- Wood, R.; Bretherton, C.S.; Hartmann, D.L. Diurnal cycle of liquid water path over the subtropical and tropical oceans. Geophys. Res. Lett. 2002, 29, 7-1–7-4. [Google Scholar] [CrossRef]
- Min, M.; Zhang, Z. On the influence of cloud fraction diurnal cycle and sub-grid cloud optical thickness variability on all-sky direct aerosol radiative forcing. J. Quant. Spectrosc. Radiat. Transf. 2014, 142, 25–36. [Google Scholar] [CrossRef]
- Chepfer, H.; Brogniez, H.; Noël, V. Diurnal variations of cloud and relative humidity profiles across the tropics. Sci. Rep. 2019, 9, 16045. [Google Scholar] [CrossRef]
- Noel, V.; Chepfer, H.; Chiriaco, M.; Yorks, J. The diurnal cycle of cloud profiles over land and ocean between 51 S and 51 N, seen by the CATS spaceborne lidar from the International Space Station. Atmos. Chem. Phys. 2018, 18, 9457–9473. [Google Scholar] [CrossRef]
- Wallace, J.M. Diurnal variations in precipitation and thunderstorm frequency over the conterminous United States. Mon. Weather Rev. 1975, 103, 406–419. [Google Scholar] [CrossRef]
- Stubenrauch, C.J.; Chédin, A.; Rädel, G.; Scott, N.A.; Serrar, S. Cloud properties and their seasonal and diurnal variability from TOVS Path-B. J. Clim. 2006, 19, 5531–5553. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Lagaris, I.E.; Likas, A.; Fotiadis, D.I. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef] [PubMed]
- Wilby, R.L.; Wigley, T.M.L.; Conway, D.; Jones, P.D.; Hewitson, B.C.; Main, J.; Wilks, D.S. Statistical downscaling of general circulation model output: A comparison of methods. Water Resour. Res. 1998, 34, 2995–3008. [Google Scholar] [CrossRef]
- Lary, D.J.; Alavi, A.H.; Gandomi, A.H.; Walker, A.L. Machine learning in geosciences and remote sensing. Geosci. Front. 2016, 7, 3–10. [Google Scholar] [CrossRef]
- Yuan, X.; Chen, C.; Lei, X.; Yuan, Y.; Muhammad Adnan, R. Monthly runoff forecasting based on LSTM–ALO model. Stoch. Environ. Res. Risk Assess. 2018, 32, 2199–2212. [Google Scholar] [CrossRef]
- Ikram, R.M.A.; Mostafa, R.R.; Chen, Z.; Parmar, K.S.; Kisi, O.; Zounemat-Kermani, M. Water temperature prediction using improved deep learning methods through reptile search algorithm and weighted mean of vectors optimizer. J. Mar. Sci. Eng. 2023, 11, 259. [Google Scholar] [CrossRef]
- Mostafa, R.R.; Kisi, O.; Adnan, R.M.; Sadeghifar, T.; Kuriqi, A. Modeling potential evapotranspiration by improved machine learning methods using limited climatic data. Water 2023, 15, 486. [Google Scholar] [CrossRef]
- Adnan, R.M.; Mostafa, R.R.; Islam, A.R.M.T.; Kisi, O.; Kuriqi, A.; Heddam, S. Estimating reference evapotranspiration using hybrid adaptive fuzzy inferencing coupled with heuristic algorithms. Comput. Electron. Agric. 2021, 191, 106541. [Google Scholar] [CrossRef]
- Adnan, R.M.; Dai, H.L.; Mostafa, R.R.; Parmar, K.S.; Heddam, S.; Kisi, O. Modeling multistep ahead dissolved oxygen concentration using improved support vector machines by a hybrid metaheuristic algorithm. Sustainability 2022, 14, 3470. [Google Scholar] [CrossRef]
- Adnan, R.M.; Dai, H.L.; Mostafa, R.R.; Islam, A.R.M.T.; Kisi, O.; Heddam, S.; Zounemat-Kermani, M. Modelling groundwater level fluctuations by ELM merged advanced metaheuristic algorithms using hydroclimatic data. Geocarto Int. 2023, 38, 2158951. [Google Scholar] [CrossRef]
- Adnan, R.M.; Meshram, S.G.; Mostafa, R.R.; Islam, A.R.M.T.; Abba, S.I.; Andorful, F.; Chen, Z. Application of Advanced Optimized Soft Computing Models for Atmospheric Variable Forecasting. Mathematics 2023, 11, 1213. [Google Scholar] [CrossRef]
- Adnan, R.M.; Mostafa, R.R.; Dai, H.L.; Heddam, S.; Kuriqi, A.; Kisi, O. Pan evaporation estimation by relevance vector machine tuned with new metaheuristic algorithms using limited climatic data. Eng. Appl. Comput. Fluid Mech. 2023, 17, 2192258. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Li, S.; Feng, X. Dynamic Weight Strategy of Physics-Informed Neural Networks for the 2D Navier–Stokes Equations. Entropy 2022, 24, 1254. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Z.; Zhang, X. A direct-forcing immersed boundary method for incompressible flows based on physics-informed neural network. Fluids 2022, 7, 56. [Google Scholar] [CrossRef]
- Zhou, H.; Pu, J.; Chen, Y. Data-driven forward–inverse problems for the variable coefficients Hirota equation using deep learning method. Nonlinear Dyn. 2023, 111, 14667–14693. [Google Scholar] [CrossRef]
- Omar, S.I.; Keasar, C.; Ben-Sasson, A.J.; Haber, E. Protein Design Using Physics Informed Neural Networks. Biomolecules 2023, 13, 457. [Google Scholar] [CrossRef]
- Cuomo, S.; De Rosa, M.; Giampaolo, F.; Izzo, S.; Di Cola, V.S. Solving groundwater flow equation using physics-informed neural networks. Comput. Math. Appl. 2023, 145, 106–123. [Google Scholar] [CrossRef]
- Jarolim, R.; Thalmann, J.; Veronig, A.; Podladchikova, T. Probing the solar coronal magnetic field with physics-informed neural networks. Nat. Astron. 2023, 7, 1171–1179. [Google Scholar] [CrossRef]
- Inda, A.J.G.; Huang, S.Y.; İmamoğlu, N.; Qin, R.; Yang, T.; Chen, T.; Yu, W. Physics informed neural networks (PINN) for low snr magnetic resonance electrical properties tomography (MREPT). Diagnostics 2022, 12, 2627. [Google Scholar] [CrossRef] [PubMed]
- Santana, V.V.; Gama, M.S.; Loureiro, J.M.; Rodrigues, A.E.; Ribeiro, A.M.; Tavares, F.W.; Nogueira, I.B. A First Approach towards Adsorption-Oriented Physics-Informed Neural Networks: Monoclonal Antibody Adsorption Performance on an Ion-Exchange Column as a Case Study. ChemEngineering 2022, 6, 21. [Google Scholar] [CrossRef]
- Xu, S.; Sun, Z.; Huang, R.; Guo, D.; Yang, G.; Ju, S. A practical approach to flow field reconstruction with sparse or incomplete data through physics informed neural network. Acta Mech. Sin. 2023, 39, 322302. [Google Scholar] [CrossRef]
- Yang, L.; Meng, X.; Karniadakis, G.E. B-PINNs: Bayesian physics-informed neural networks for forward and inverse PDE problems with noisy data. J. Comput. Phys. 2021, 425, 109913. [Google Scholar] [CrossRef]
- Twohy, C.H.; Toohey, D.W.; Levin, E.J.; DeMott, P.J.; Rainwater, B.; Garofalo, L.A.; Fischer, E.V. Biomass burning smoke and its influence on clouds over the western US. Geophys. Res. Lett. 2021, 48, e2021GL094224. [Google Scholar] [CrossRef]
- Kostinski, A.B. Drizzle rates versus cloud depths for marine stratocumuli. Environ. Res. Lett. 2008, 3, 045019. [Google Scholar] [CrossRef]
- NDSolve. Wolfram Language & System Documentation Center. Available online: https://reference.wolfram.com/language/ref/NDSolve.html (accessed on 18 August 2023).
- Gruesbeck, C. Aerosol-Cloud-Rain Equations with Time Delay. Wolfram Demonstrations Project. 2013. Available online: http://demonstrations.wolfram.com/AerosolCloudRainEquationsWithTimeDelay/ (accessed on 27 June 2023).
- Berg, M.J. Tutorial: Aerosol characterization with digital in-line holography. J. Aerosol Sci. 2022, 165, 106023. [Google Scholar] [CrossRef]
- Anand, S.; Mayya, Y.S. Coagulation in a diffusing Gaussian aerosol puff: Comparison of analytical approximations with numerical solutions. J. Aerosol Sci. 2009, 40, 348–361. [Google Scholar] [CrossRef]
- Arias-Zugasti, M.; Rosner, D.E.; Fernandez de la Mora, J. Low Reynolds number capture of small particles on a cylinder by diffusion, interception, and inertia at subcritical Stokes numbers: Numerical calculations, correlations, and small diffusivity asymptote. Aerosol Sci. Technol. 2019, 53, 1367–1380. [Google Scholar] [CrossRef]
- Li, Y.; Bowler, N. Computation of Mie derivatives. Appl. Opt. 2013, 52, 4997–5006. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Skaggs, T.H.; Kabala, Z.J. Recovering the release history of a groundwater contaminant. Water Resour. Res. 1994, 30, 71–79. [Google Scholar] [CrossRef]
- Skaggs, T.H.; Kabala, Z.J. Recovering the history of a groundwater contaminant plume: Method of quasi-reversibility. Water Resour. Res. 1995, 31, 2669–2673. [Google Scholar] [CrossRef]
- Skaggs, T.H.; Kabala, Z.J. Limitations in recovering the history of a groundwater contaminant plume. J. Contam. Hydrol. 1998, 33, 347–359. [Google Scholar] [CrossRef]
- Kabala, Z.J.; Skaggs, T.H. Comment on“Minimum relative entropy inversion: Theory and application to recovering the release history of a groundwater contaminant” by Allan D. Woodbury and Tadeusz J. Ulrych. Water Resour. Res. 1998, 34, 2077–2079. [Google Scholar] [CrossRef]
- Alapati, S.; Kabala, Z.J. Recovering the release history of a groundwater contaminant using a non-linear least-squaresmethod. Hydrol. Process. 2000, 14, 1003–1016. [Google Scholar] [CrossRef]
- Bae, J.; Kim, D. The interactions between wildfires, bamboo and aerosols in the south-western Amazon: A conceptual model. Prog. Phys. Geogr. Earth Environ. 2021, 45, 621–631. [Google Scholar] [CrossRef]
- Fang, D.; Lin, L.; Tong, Y. Time-marching based quantum solvers for time-dependent linear differential equations. Quantum 2023, 7, 955. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment Name | Artificial Neural Network | Physics-Informed Neural Network | ||
|---|---|---|---|---|
| Prediction | ||||
| Reconstruction | ||||
| Prediction with wildfire | ||||
| Reconstruction with wildfire | ||||
| Prediction with the diurnal cycle | ||||
| Reconstruction with the diurnal cycle | ||||
| Experiment Name | ||
|---|---|---|
| Prediction | ||
| Reconstruction | ||
| Prediction with wildfire | ||
| Reconstruction with wildfire | ||
| Prediction with the diurnal cycle | ||
| Reconstruction with the diurnal cycle |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, A.V.; Kabala, Z.J. Predicting and Reconstructing Aerosol–Cloud–Precipitation Interactions with Physics-Informed Neural Networks. Atmosphere 2023, 14, 1798. https://doi.org/10.3390/atmos14121798
Hu AV, Kabala ZJ. Predicting and Reconstructing Aerosol–Cloud–Precipitation Interactions with Physics-Informed Neural Networks. Atmosphere. 2023; 14(12):1798. https://doi.org/10.3390/atmos14121798
Chicago/Turabian StyleHu, Alice V., and Zbigniew J. Kabala. 2023. "Predicting and Reconstructing Aerosol–Cloud–Precipitation Interactions with Physics-Informed Neural Networks" Atmosphere 14, no. 12: 1798. https://doi.org/10.3390/atmos14121798
APA StyleHu, A. V., & Kabala, Z. J. (2023). Predicting and Reconstructing Aerosol–Cloud–Precipitation Interactions with Physics-Informed Neural Networks. Atmosphere, 14(12), 1798. https://doi.org/10.3390/atmos14121798