
Harmonisation in Atmospheric Dispersion Modelling Approaches to Assess Toxic Consequences in the Neighbourhood of Industrial Facilities †

Abstract
:1. Introduction
1.1. Toxic Gas Atmospheric Dispersion Accidents
- To offer direction during model development, ensuring consistent representation of physical phenomena, especially concerning the relationship between atmospheric turbulence and the diffusion coefficient for pollutants.
- To offer guidance on constructing input data for the model, including factors like the atmospheric wind and turbulence profile, the appropriate roughness value, and the specification of the source term within the AT&D model.
- To provide users with guidance that constrains potential individual choices, particularly concerning numerical parameters or mesh settings.
1.2. Context of AT&D Model Uses
1.3. Objectives of the Study
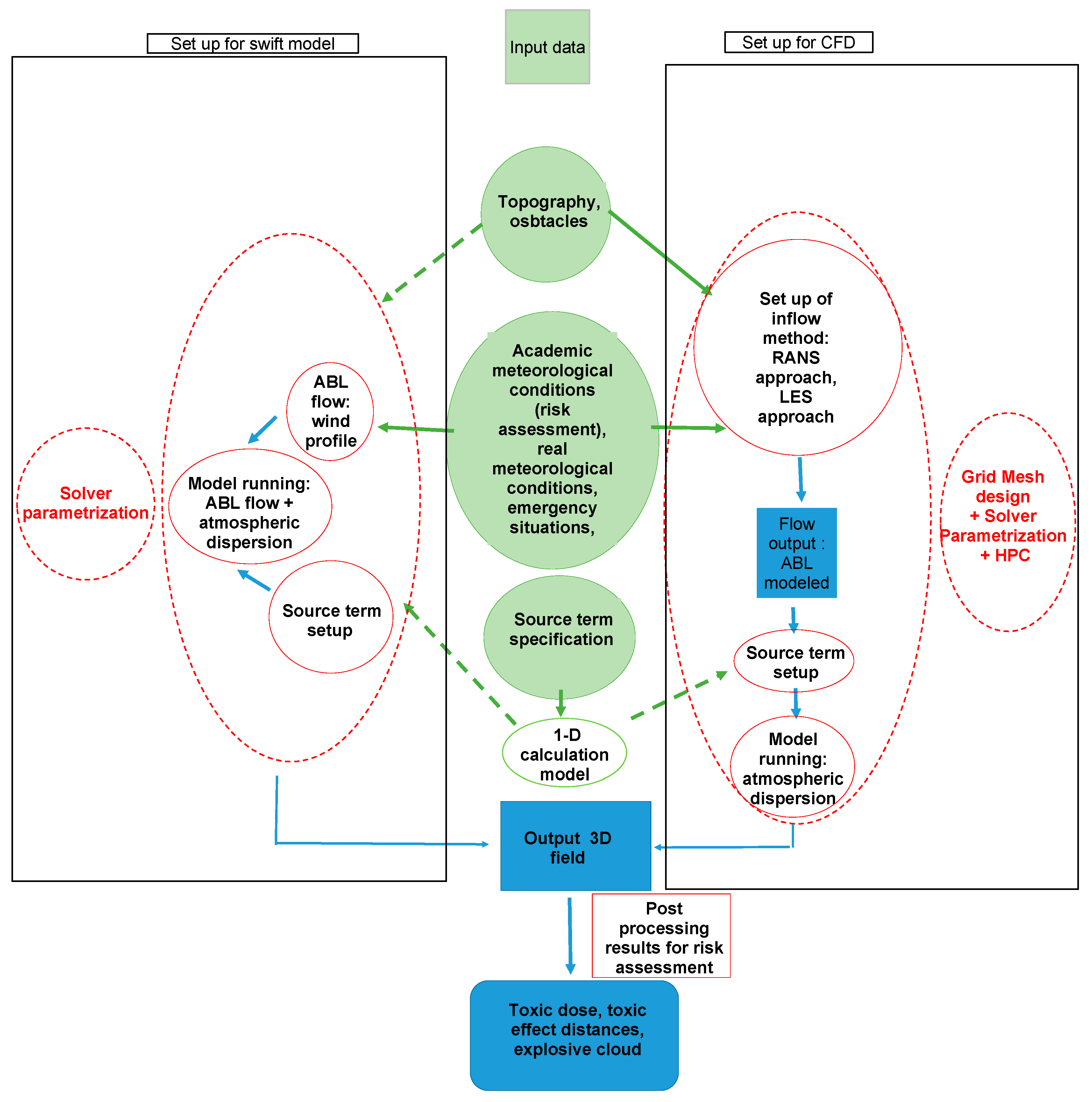
2. Main Steps of AT&D Modelling
- the representation of the velocity and turbulence profile,
- the description of the emission source term,
- the differences in terms of physical phenomena considered in the model.
2.1. Background about Theoretical Approaches
2.1.1. Gaussian Models
2.1.2. Integral Models
2.1.3. Shallow Layer Models
2.1.4. CFD Modelling
- the neutral atmosphere, where the thermal gradient corresponds to the adiabatic gradient;
- the stable atmosphere, where the gradient is lower than the adiabatic one;
- the unstable atmosphere, where the gradient is higher than the adiabatic one.
- The turbulence model should consider the influence of the thermal gradient on the turbulence generation of suppression.
- The atmospheric turbulence anisotropy should be considered as a target when developing atmospheric dispersion models.
- Develop LES harmonised practices to build the input turbulence.
2.1.5. Harmonisation between Model Input Data
2.2. From Meteorological Conditions to AT&Model Flow Input Data
2.3. From Toxic Emission Assessment to Term Source Implementation
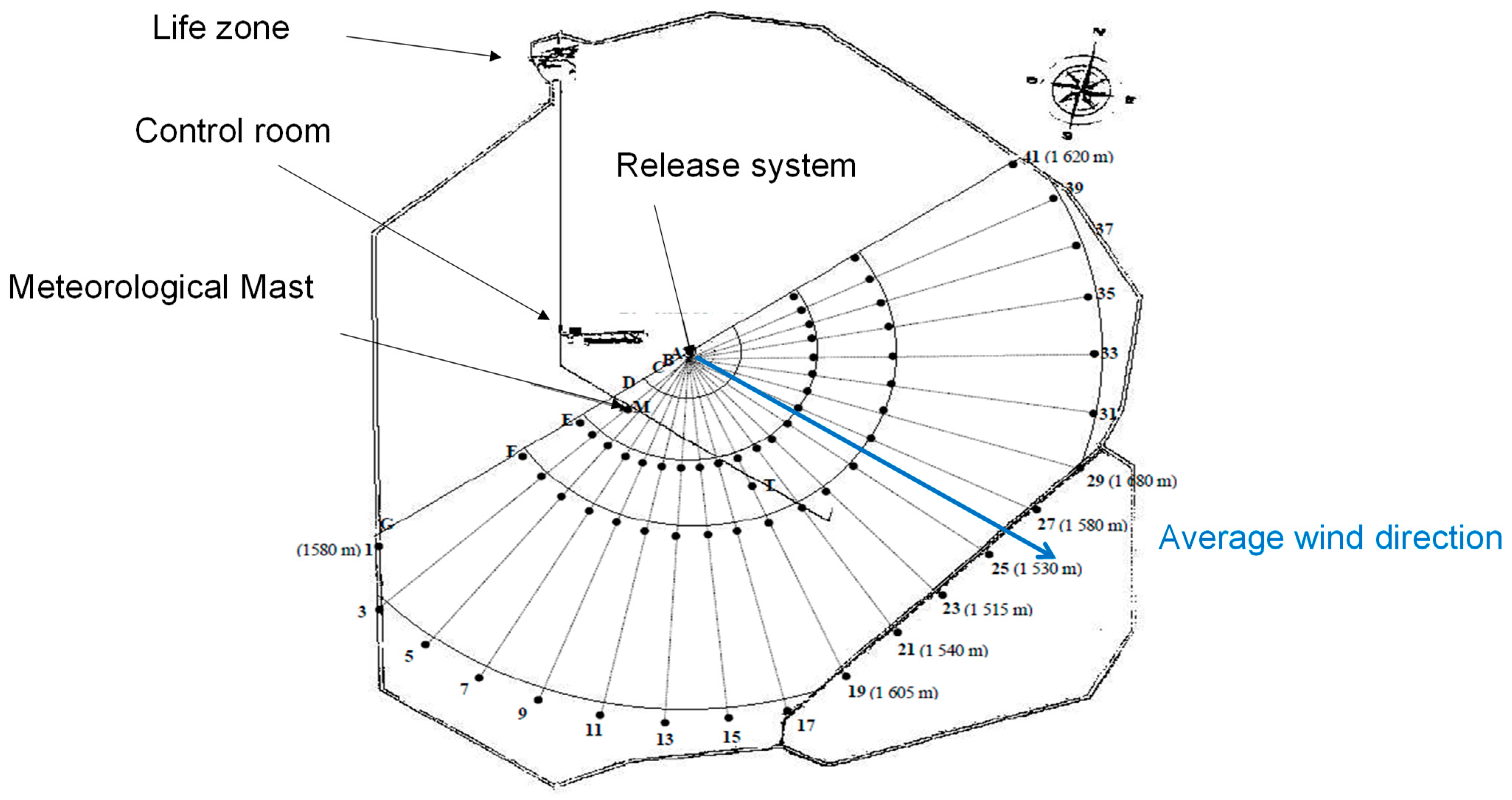
3. Application to an Experimental Case
3.1. Description of the Experimental Dataset
3.2. Atmospheric Dispersion Modelling by “Swift” Model
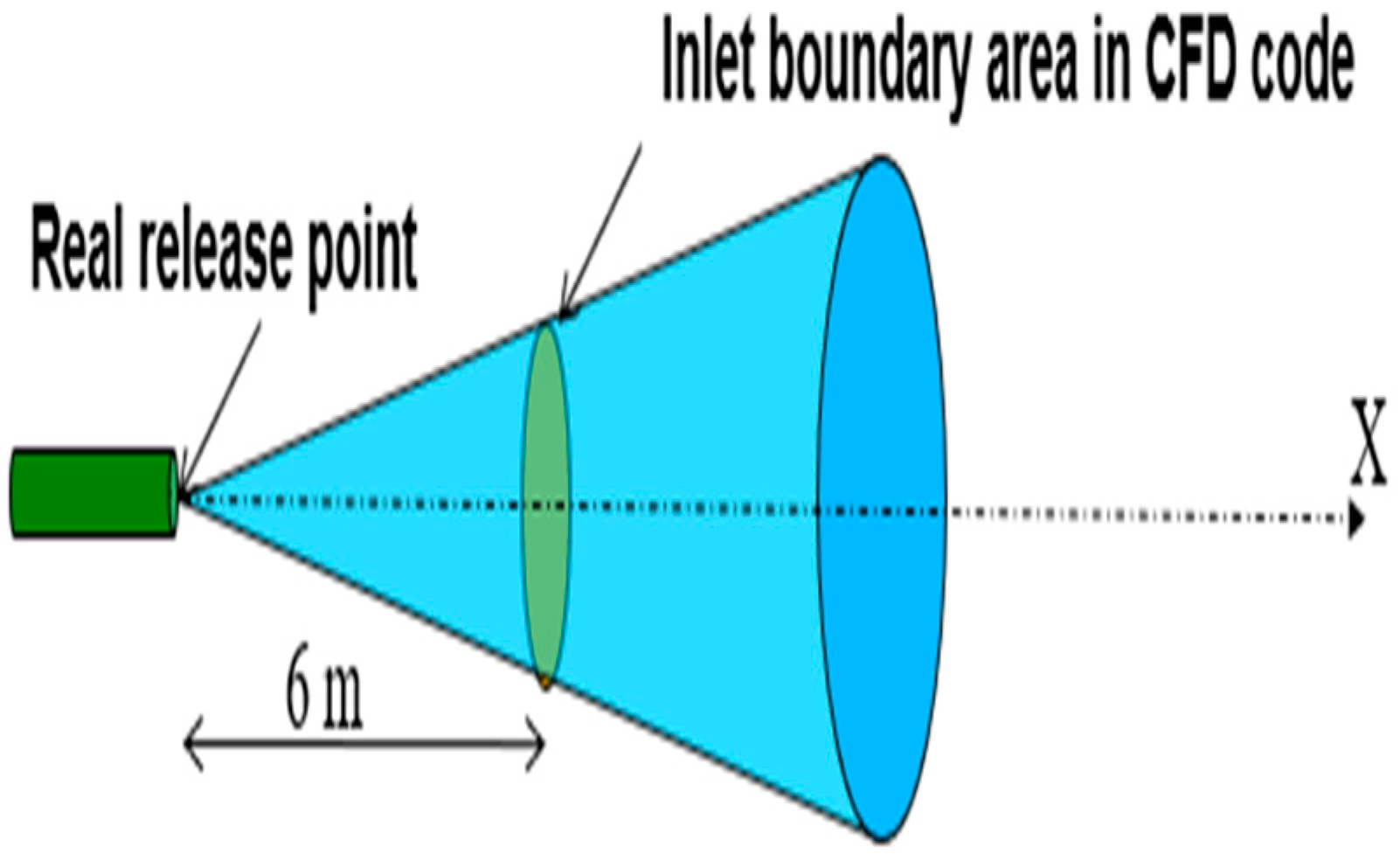
3.3. Adaptation of the Experimental Atmospheric Signal for CFD Model Inflow
3.3.1. Turbulent Closure and Inlet Boundary Conditions
3.3.2. Mesh and Numerical Set-Up
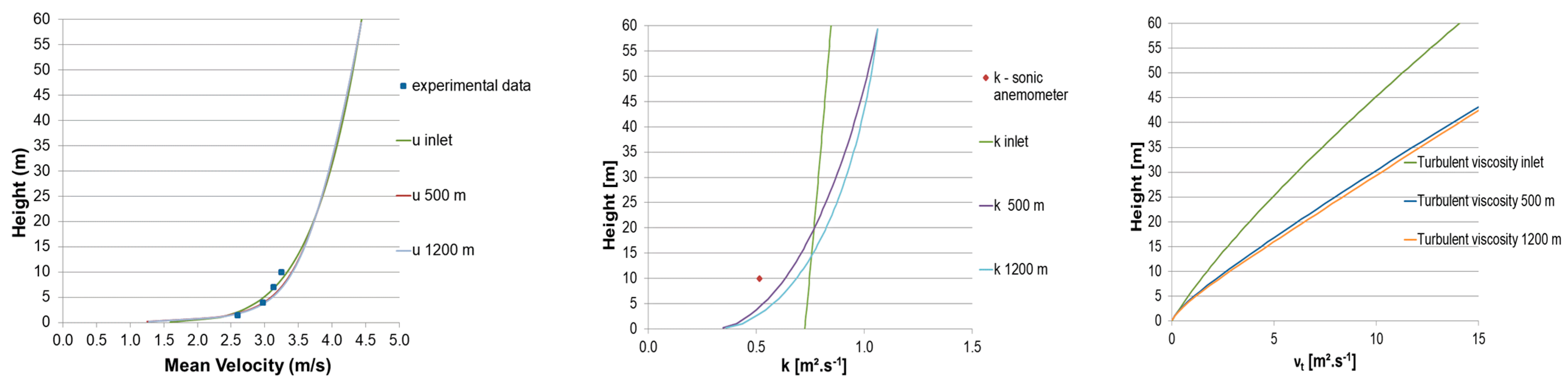
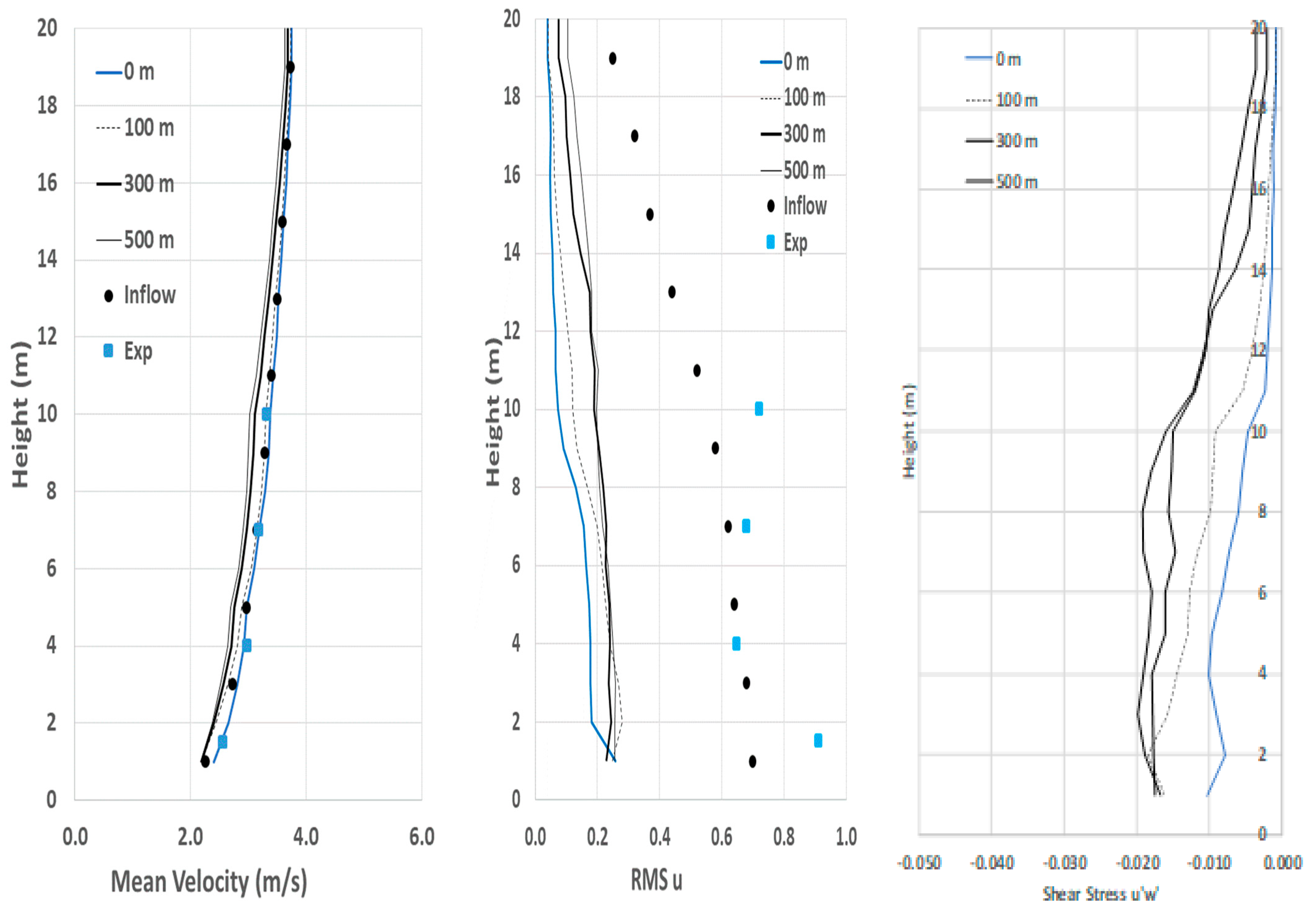
3.3.3. Wind and Turbulence Profile Advection
3.4. Implementation of a Biphasic Dense Gas Source Term
3.5. Synthesis of Model Inputs
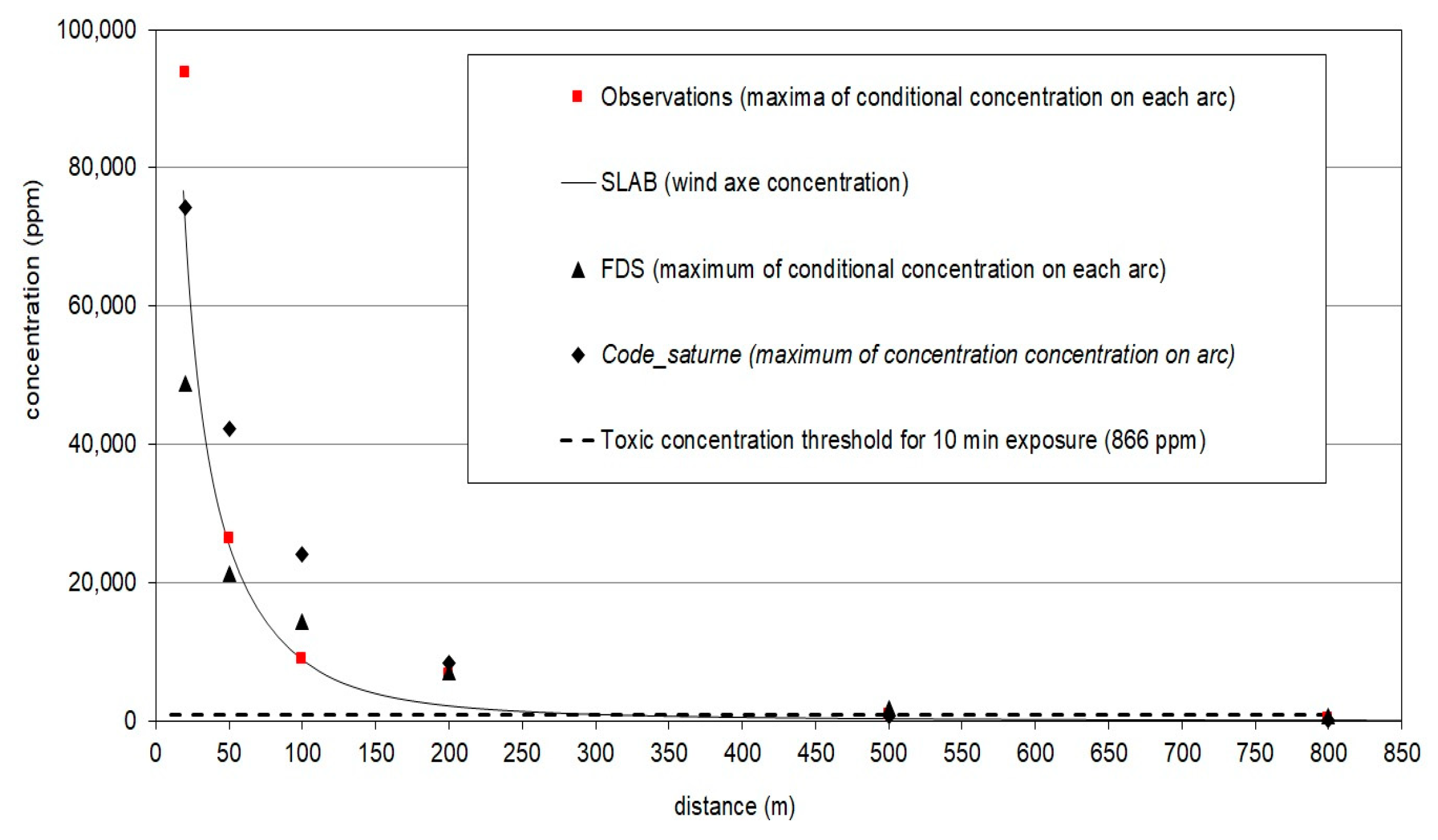
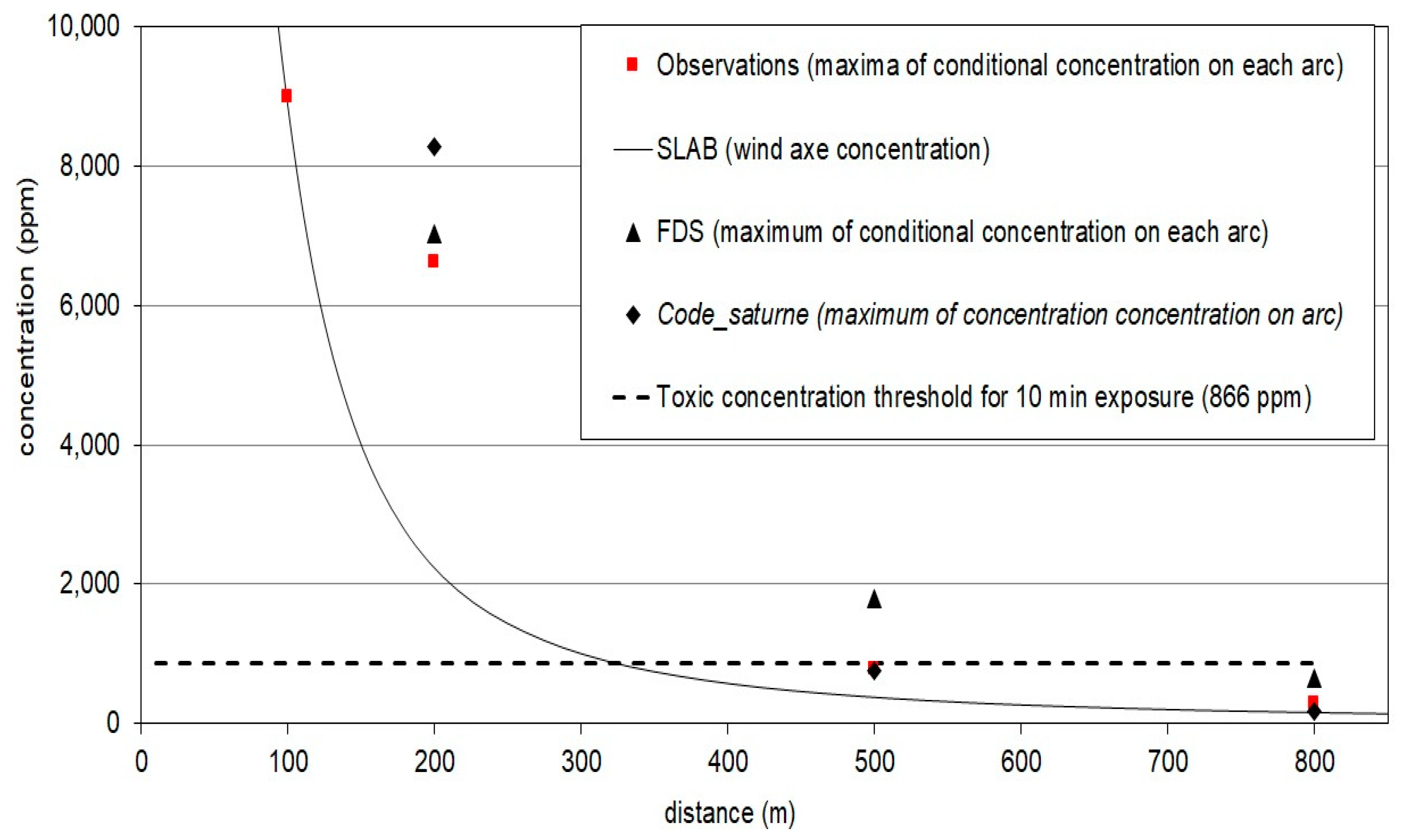
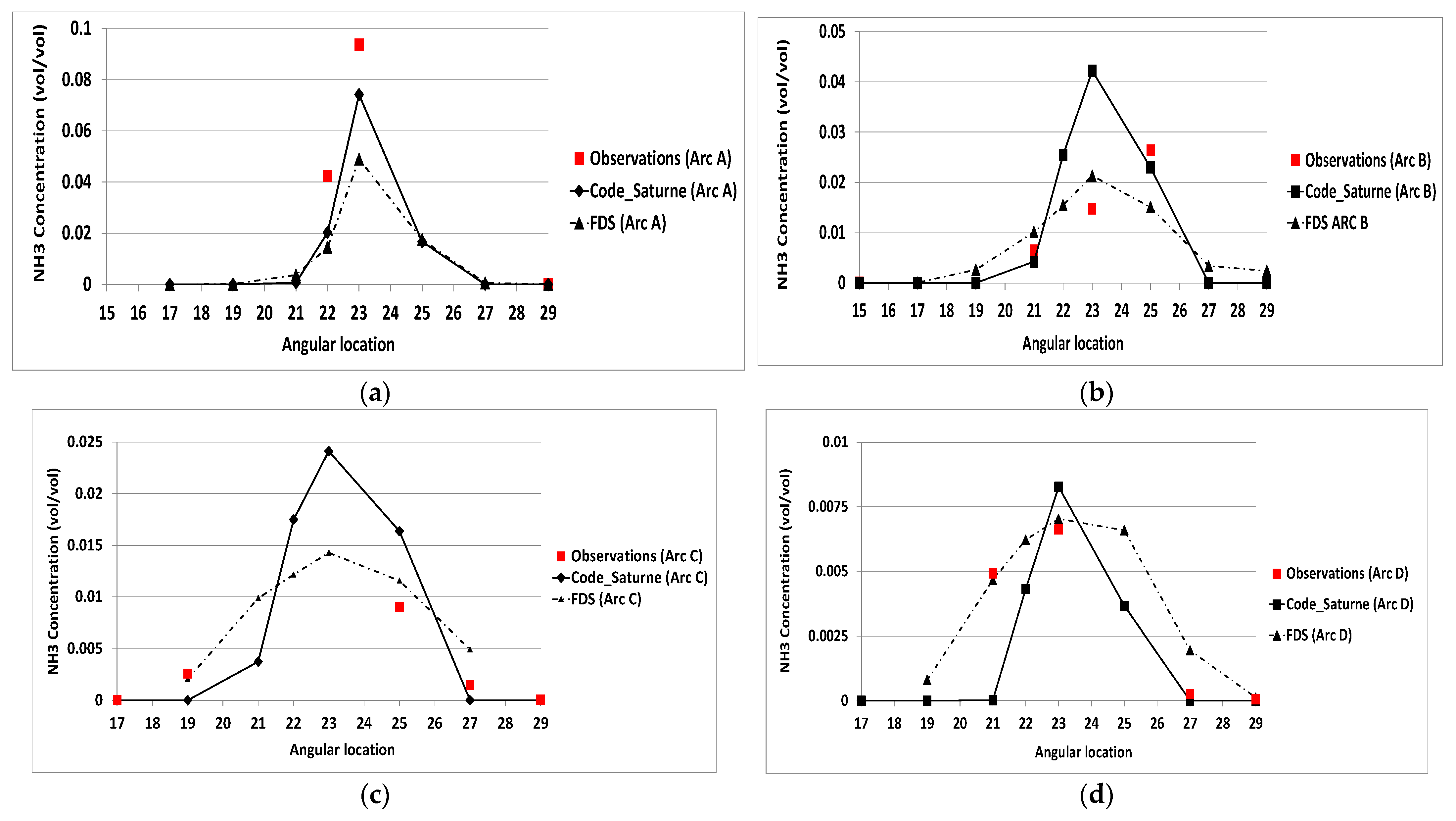
3.6. Comparison of Measured Concentrations with Atmospheric Dispersion Modelling Results
3.7. Outcomes for Best Practices within the Regulatory Context
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cavallaro, A.; Tebaldi, G.; Gualdi, R. Analysis of Transport and Ground Deposition of the TCDD Emitted on 10 July 1976 from the ICMESA Factory (Seveso, Italy). Atmos. Environ. 1967, 16, 731–740. [Google Scholar] [CrossRef]
- Havens, J.; Walker, H.; Spicer, T. Bhopal Atmospheric Dispersion Revisited. J. Hazard. Mater. 2012, 233, 33–40. [Google Scholar] [CrossRef] [PubMed]
- Folch, A.; Barcons, J.; Kozono, T.; Costa, A. High-Resolution Modelling of Atmospheric Dispersion of Dense Gas Using TWODEE-2.1: Application to the 1986 Lake Nyos Limnic Eruption. Nat. Hazards Earth Syst. Sci. 2017, 17, 861–879. [Google Scholar] [CrossRef]
- Al-Shanini, A.; Ahmad, A.; Khan, F. Accident Modelling and Analysis in Process Industries. J. Loss Prev. Process Ind. 2014, 32, 319–334. [Google Scholar] [CrossRef]
- Lenoble, C.; Durand, C. Introduction of frequency in France following the AZF accident. J. Loss Prev. Process Ind. 2011, 24, 227–236. [Google Scholar] [CrossRef]
- Carissimo, B.; Castelli, S.T.; Tinarelli, G. JRII Special Sonic Anemometer Study: A First Comparison of Building Wakes Measurements with Different Levels of Numerical Modelling Approaches. Atmos. Environ. 2021, 244, 117798. [Google Scholar] [CrossRef]
- Jacob, J.; Merlier, L.; Marlow, F.; Sagaut, P. Lattice Boltzmann Method-Based Simulations of Pollutant Dispersion and Urban Physics. Atmosphere 2021, 12, 833. [Google Scholar] [CrossRef]
- Turner, D.B. Workbook of Atmospheric Dispersion Estimates; Publication No. 999, AP26; U.S. Public Health Service, Division of Air Pollution: Washington, DC, USA, 1970.
- Copelli, S.; Barozzi, M.; Fumagalli, A.; Derudi, M. Application of a Gaussian Model to Simulate Contaminants Dispersion in Industrial Accidents. Chem. Eng. Trans. 2019, 77, 799–804. [Google Scholar] [CrossRef]
- Doury, A. Vade-Mecum des Transferts Atmosphériques; DSN report n°440. 1981. Available online: https://www.radioprotection.org/articles/radiopro/ref/2011/06/radiopro_icrer_46668/radiopro_icrer_46668.html (accessed on 20 September 2023).
- Hanna, S.R.; Briggs, G.A.; Hosker, R.P., Jr. Handbook on Atmospheric Diffusion; Technical Information Center U.S. Department of Energy: Oak Ridge, TN, USA, 1982.
- Pasquill, F. The estimation of the dispersion of windborne material. Meteorol. Mag. 1961, 90, 33–49. [Google Scholar]
- Witlox, H.W.M. PHAST 6.0—Unified Dispersion Model—Consequence Modelling Documentation; DNV: Katy, TX, USA, 2000. [Google Scholar]
- Ermak, D.L. User’s Manual for SLAB: An Atmospheric Dispersion Model for Denser Than Air Releases; UCRL-MA-105607; Lawrence Livermore National Laboratory: Livermore, CA, USA, 1990.
- Sidik, N.A.C.; Yusuf, S.N.A.; Asako, Y.; Mohamed, S.B.; Japar, W.M.A.A. A Short Review on RANS Turbulence Models. CFD Lett. 2020, 12, 83–96. [Google Scholar] [CrossRef]
- Garnier, E.; Adams, N.; Sagaut, P. Large Eddy Simulation for Compressible Flows; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Pope, S. Ten questions concerning the large-eddy simulation of turbulent flows. New J. Phys. 2004, 6, 35. [Google Scholar] [CrossRef]
- Baumann-Stanzer, K.; Leitl, B.; Trini Castelli, S.; Milliez, C.M.; Berbekar, E.; Rakai, A.; Fuka, V.; Hellsten, A.; Petrov, A.; Efthimiou, G.; et al. Evaluation of local-scale models for accidental releases in built environments—Results of the “Michelstadt exercise” in COST Action ES1006. In Proceedings of the 16th International Conference on Harmonisation within Atmospheric Dispersion Modelling for Regulatory Purposes, Varna, Bulgaria, 8–11 September 2014. [Google Scholar]
- Detering, H.W.; Etling, D. Application of the turbulence model to the atmospheric boundary layer. Bound.-Layer Meteorol. 1985, 33, 113–133. [Google Scholar] [CrossRef]
- Rodi, W. Turbulence Models and Their Application in Hydraulics: A State-of-the-Art Review, 3rd ed.; Routledge: London, UK, 1993. [Google Scholar]
- Duynkerke, P. Application of the k-ε turbulence closure model to the neutral and stable atmospheric boundary layer. J. Atmos. Sci. 1988, 45, 865–880. [Google Scholar] [CrossRef]
- Smagorinsky, J. General circulation experiments with the primitive equations. Mon. Weather. Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Stull, R.B. An Introduction to Boundary Layer Meteorology; Springer Science & Business Media: Berlin, Germany, 1988. [Google Scholar]
- Montero, G.; Rodríguez, E.; Oliver, A.; Calvo, J.; Escobar, J.M.; Montenegro, R. Optimisation technique for improving wind downscaling results by estimating roughness parameters. J. Wind. Eng. Ind. Aerodyn. 2018, 174, 411–423. [Google Scholar] [CrossRef]
- Golder, D. Relations among stability parameters in the surface layer. Bound.-Layer Meteorol. 1972, 3, 47–58. [Google Scholar] [CrossRef]
- Guide de Bonnes Pratiques Pour la Réalisation de Modélisations 3D pour des Scénarios de Dispersion Atmosphérique en Situation Accidentelle. Rapport de Synthèse des Travaux du Groupe de Travail National. Available online: https://aida.ineris.fr/sites/aida/files/guides/Guide_Bonnes_Pratiques_V2.02_RNT.pdf (accessed on 23 February 2011).
- Lacome, J.-M.; Truchot, B. Harmonization of practices for atmospheric dispersion modelling within the framework of risk assessment. In Proceedings of the 15th Conference on “Harmonisation within Atmospheric Dispersion Modelling for Regulatory Purposes, Madrid, Spain, 6–9 May 2013. [Google Scholar]
- Gryning, S.; Batchvarova, E.; Brümmer, B.; Jorgensen, H.; Larsen, S. On the extension of the wind profile over homogeneous terrain beyond the surface boundary layer. Bound.-Layer Meteorol. 2007, 124, 251–268. [Google Scholar] [CrossRef]
- Commission for the Prevention of Disasters Caused by Hazardous Materials. TNO—Yellow Book: “Methods for Calculation of Physical Effects”; CPR 14E; Ministerie van Verkeer en Waterstaat: The Hague, The Netherlands, 1996.
- Vendel, F. Modélisation de la Dispersion Atmosphérique en Présence D’obstacles Complexes: Application à L’étude de Sites Industriels. Ph.D. Thesis, University of Lyon, Lyon, France, 2011. [Google Scholar]
- Batt, R.; Gant, S.E.; Lacome, J.-M.; Truchot, B. Modelling of stably-stratified atmospheric boundary layers with commercial CFD software for use in risk assessment. In Proceedings of the 15th International Symposium on Loss Prevention and Safety Promotion in the Process Industries, Freiburg, Germany, 5–8 June 2016. [Google Scholar]
- Blocken, B.; Stathopoulos, T.; Carmeliet, J. CFD simulation of the atmospheric boundary layer: Wall function problems. Atmos. Environ. 2007, 41, 238–252. [Google Scholar] [CrossRef]
- Britter, R.; Weil, J.; Leung, J.; Hanna, S. Toxic industrial chemical (TIC) source emissions modeling for pressurized liquefied gases. Atmos. Environ. 2011, 45, 1–25. [Google Scholar] [CrossRef]
- Calay, R.; Holdo, A. Modelling the dispersion of flashing jets using CFD. J. Hazard. Mater. 2008, 154, 1198–1209. [Google Scholar] [CrossRef]
- Lacome, J.; Lemofack, C.; Jamois, D.; Reveillon, J.; Duret, B.; Demoulin, F. Experimental data and numerical modeling of flashing jets of pressure liquefied gases. Process. Saf. Prog. 2020, 40, e12151. [Google Scholar] [CrossRef]
- Kelsey, A. CFD Modeling of Propane Flashing Jets: Simulation of Flashing Propane Jets; Health & Safety Laboratory, UK: Buxton, UK, 2002.
- Britter, R.E. Dispersion of Two-Phase Flashing Releases; CERC Ltd.: Leicester, UK, 1995. [Google Scholar]
- Bouet, R.; Duplantier, S.; Salvi, O. Ammonia large scale atmospheric dispersion experiments in industrial configurations. J. Loss Prev. Process. Ind. 2005, 18, 512–519. [Google Scholar] [CrossRef]
- Tørnes, J.A.; Vik, T. Comparison of some commercial dispersion models for heavy gas releases. In Proceedings of the 18th International Conference on Harmonisation within Atmospheric Dispersion Modelling for Regulatory Purposes, Bologna, Italy, 9–12 October 2017. [Google Scholar]
- Demael, E.; Carissimo, B. Comparative Evaluation of an Eulerian CFD and Gaussian Plume Models Based on Prairie Grass Dispersion Experiment. J. Appl. Meteorol. Climatol. 2008, 47, 888–900. [Google Scholar] [CrossRef]
- Archambeau, F.; Mechitoua, N.; Sakiz, M. Code_Saturne: A finite volume code for the computation of turbulent incompressible flows—Industrial applications. Int. J. Finite Vol. 2004, 1, 1–62. [Google Scholar]
- Milliez, M.; Carissimo, B. Numerical simulations of pollutant dispersion in an idealized urban area, for different meteorological conditions. Bound.-Layer Meteorol. 2007, 122, 321–342. [Google Scholar] [CrossRef]
- Xiao, W. Experimental and Numerical Study of Atmospheric Turbulence and Dispersion in Stable Conditions and in Near Field at a Complex Site. Ph.D. Thesis, Universite de Paris-Est-Marne-la-Vallee, Paris, France, 2016. [Google Scholar]
- Viollet, P.L. On the numerical modeling of stratified flows. In Physical Processes in Estuaries; Springer: Berlin/Heidelberg, Germany, 1988; pp. 257–277. [Google Scholar]
- Barratt, R. Atmospheric Dispersion Modelling: A Practical Introduction; Business & Environmental Practitioner; Routledge: London, UK, 2001. [Google Scholar]
- McGrattan, K.B. Fire Dynamics Simulator (Version 4): Technical Reference Guide NIST Special Publication 1018; NIST: Washington, DC, USA, 2005.
- Jarrin, N. Synthetic Inflow Boundary Conditions for the Numerical Simulation of Turbulence. Ph.D. Thesis, University of Manchester, Manchester, UK, 2008. [Google Scholar]
- Gorlé, C.; van Beeck, J.; Rambaud, P.; Van Tendeloo, G. CFD modelling of small particle dispersion: The influence of the turbulence kinetic energy in the atmospheric boundary layer. Atmos. Environ. 2009, 43, 673–681. [Google Scholar] [CrossRef]
- Hanna, S.R.; Tehranian, S.; Carissimo, B.; Macdonald, R.W.; Lohner, R. Comparisons of Model Simulations with Observations of Mean Flow and Turbulence within Simple Obstacle Arrays. Atmos. Environ. 2002, 36, 5067–5079. [Google Scholar] [CrossRef]
- Estrada, J.M. Numerical Simulation of Atmospheric Dispersion: Application for Interpretation and Data Assimilation of Pollution Optical Measurements. Ph.D. Thesis, University of Lyon, Lyon, France, 2022. [Google Scholar]
- Papadourakis, A.; Caram, H.S.; Barner, C.L. Upper and lower bounds of droplet evaporation in two-phase jets. J. Loss Prev. Ind. 1993, 4, 93–101. [Google Scholar] [CrossRef]
- Yee, E.; Biltoft, C.A. Concentration Fluctuation Measurements in a Plume Dispersing Through a Regular Array of Obstacles. Bound.-Layer Meteor. 2004, 111, 363–415. [Google Scholar] [CrossRef]
- Wilson, D.J. Concentration Fluctuations and Averaging Time in Vapor Clouds; Wiley: Hoboken, NJ, USA, 1995. [Google Scholar]
- Haddock, S.R.; Williams, R.J. The density of an ammonia cloud in the early stages of atmospheric dispersion. J. Chem. Technol. Biotechnol. 1979, 29, 655–672. [Google Scholar] [CrossRef]
- Dysters, S.J.; Ellis, K.L. ADMS 3. Plume Visibility by DJ Carruthers; CERC: Leicester, UK, 2005. [Google Scholar]
- Fox, S.; Hanna, S.; Mazzola, T.; Spicer, T.; Chang, J.; Gant, S. Overview of the Jack Rabbit II (JR II) field experiments and summary of the methods used in the dispersion model comparisons. Atmos. Environ. 2022, 269, 118783. [Google Scholar] [CrossRef]
- Leroy, G.; Lacome, J.-M.; Truchot, B.; Joubert, L. Harmonization in CFD Approaches to Assess Toxic Consequences of Ammonia Releases. In Proceedings of the 17th International Conference on Harmonisation within Atmospheric Dispersion Modelling for Regulatory Purposes, Budapest, Hungary, 9–12 May 2016. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ambient Temperature | Wind Speed (m/s) at 10 m | Friction Velocity: u* (m/s) | Pasquill Stability Class by Determined by the Standard Deviations of the Wind Direction | Monin-Obukhov Lenght (LMO) (−) |
|---|---|---|---|---|
| 14.82 °C | 3.24 | 0.36 | C | −166 |
| Anemometer Altitude (m) | Umean (m/s) | Tx (s) | Lx | RMSx |
|---|---|---|---|---|
| 1.5 | 2.59 | 12 | 31.0 | 0.72 |
| 4 | 2.94 | 14 | 41.1 | 0.68 |
| 7 | 3.18 | 20 | 63.6 | 0.64 |
| 10 | 3.24 | 17 | 55 | 0.9 |
| Physical Characteristic | Value |
|---|---|
| Distance between real and artificial release | 6 m |
| Velocity used in the CFD code | 25 m/s |
| Vapor Temp | −50 °C |
| Section area | 1 m² |
| NH3 mass flow rate: | 4.2 kg/s (experimental data) |
| Air mass flow rate | 19.1 kg/s |
| Total mass flow rate | 23.3 kg/s |
| Model | Dispersion Model | Atmospheric Flow Input | Source Term | ||
|---|---|---|---|---|---|
| Common | Specific | Common | Specific | ||
| SLAB | Shallow layer | Mean velocity at reference height. Ground roughness of 0.03 m | Pasquil Stability class | NH3 mass flow rate of 4.2 kg/s,1 m high | Orifice release conditions: NH3 Mass flow rate of 4.2 kg/s, 0.6 liquid fraction |
| Code_Saturne | CFD, RANS | Turbulent kinetic energy and dissipation and temperature profile (not shown) based on experimental friction velocity, LMO and heat flux | Pseudo-source conditions: Equivalent gas source term located at 6 m from orifice, Total mass flow rate of 23.3 kg/s Surface area of 1 m² | ||
| FDS | CFD, LES | Isotropic integral time, length scale and RMS based on experimental data | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lacome, J.-M.; Leroy, G.; Joubert, L.; Truchot, B. Harmonisation in Atmospheric Dispersion Modelling Approaches to Assess Toxic Consequences in the Neighbourhood of Industrial Facilities. Atmosphere 2023, 14, 1605. https://doi.org/10.3390/atmos14111605
Lacome J-M, Leroy G, Joubert L, Truchot B. Harmonisation in Atmospheric Dispersion Modelling Approaches to Assess Toxic Consequences in the Neighbourhood of Industrial Facilities. Atmosphere. 2023; 14(11):1605. https://doi.org/10.3390/atmos14111605
Chicago/Turabian StyleLacome, Jean-Marc, Guillaume Leroy, Lauris Joubert, and Benjamin Truchot. 2023. "Harmonisation in Atmospheric Dispersion Modelling Approaches to Assess Toxic Consequences in the Neighbourhood of Industrial Facilities" Atmosphere 14, no. 11: 1605. https://doi.org/10.3390/atmos14111605
APA StyleLacome, J.-M., Leroy, G., Joubert, L., & Truchot, B. (2023). Harmonisation in Atmospheric Dispersion Modelling Approaches to Assess Toxic Consequences in the Neighbourhood of Industrial Facilities. Atmosphere, 14(11), 1605. https://doi.org/10.3390/atmos14111605