

Improvement and Comparison of Multi-Reference Station Regional Tropospheric Delay Modeling Method Considering the Effect of Height Difference


Abstract
1. Introduction
2. Materials and Methods
2.1. The Process of Calculating and Modeling Tropospheric Delays on VRS
2.2. Traditional Interpolation Techniques and Modified Linear Interpolation Algorithms for Tropospheric Delay
2.2.1. LIM
2.2.2. Modified LIM
2.2.3. Modified LSM
3. Results
3.1. Experimental Data
3.2. Comparative Analysis of Different Interpolation Methods
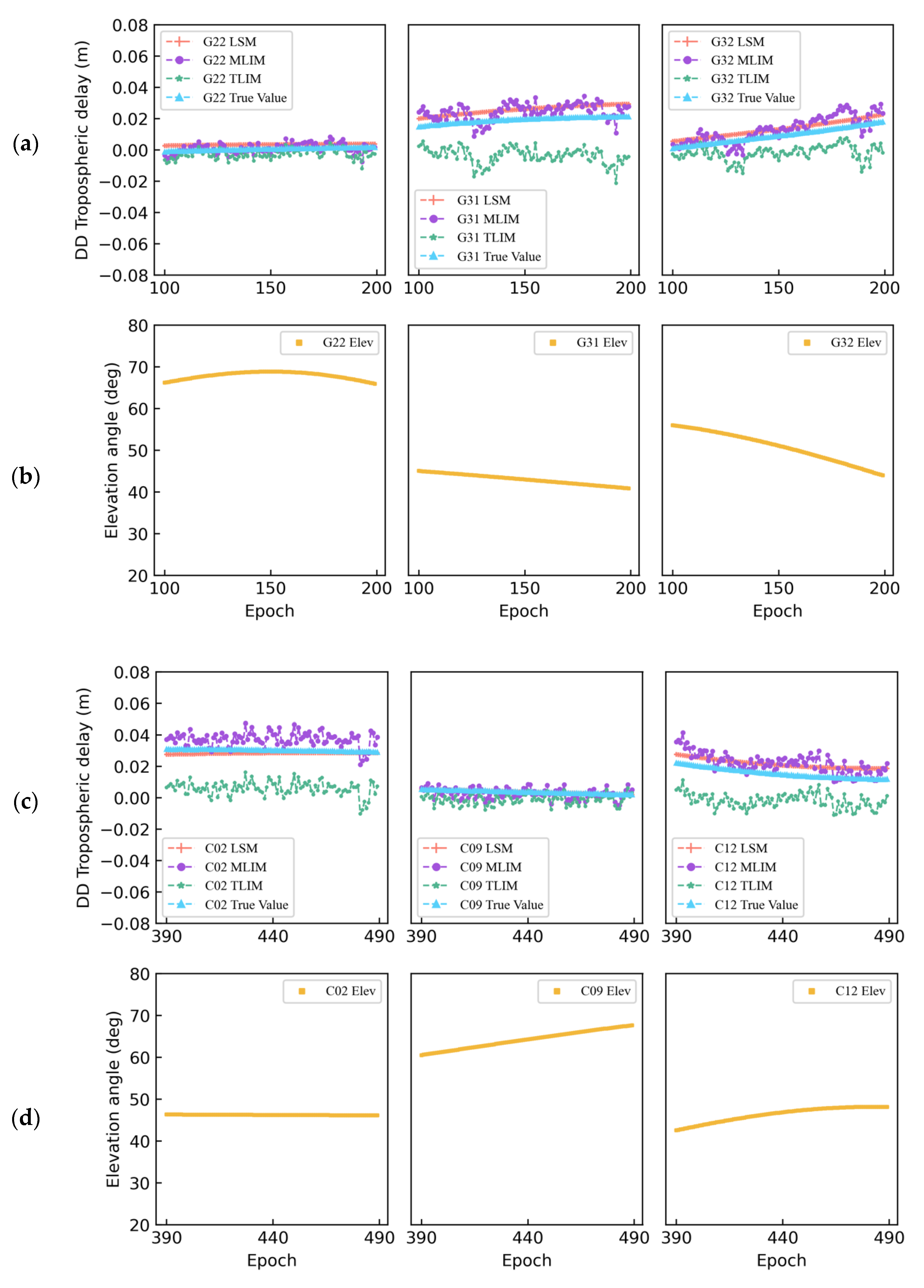
3.2.1. Tropospheric Delay Interpolation Analysis for Dataset 1
3.2.2. Tropospheric Delay Interpolation Analysis for Dataset 2
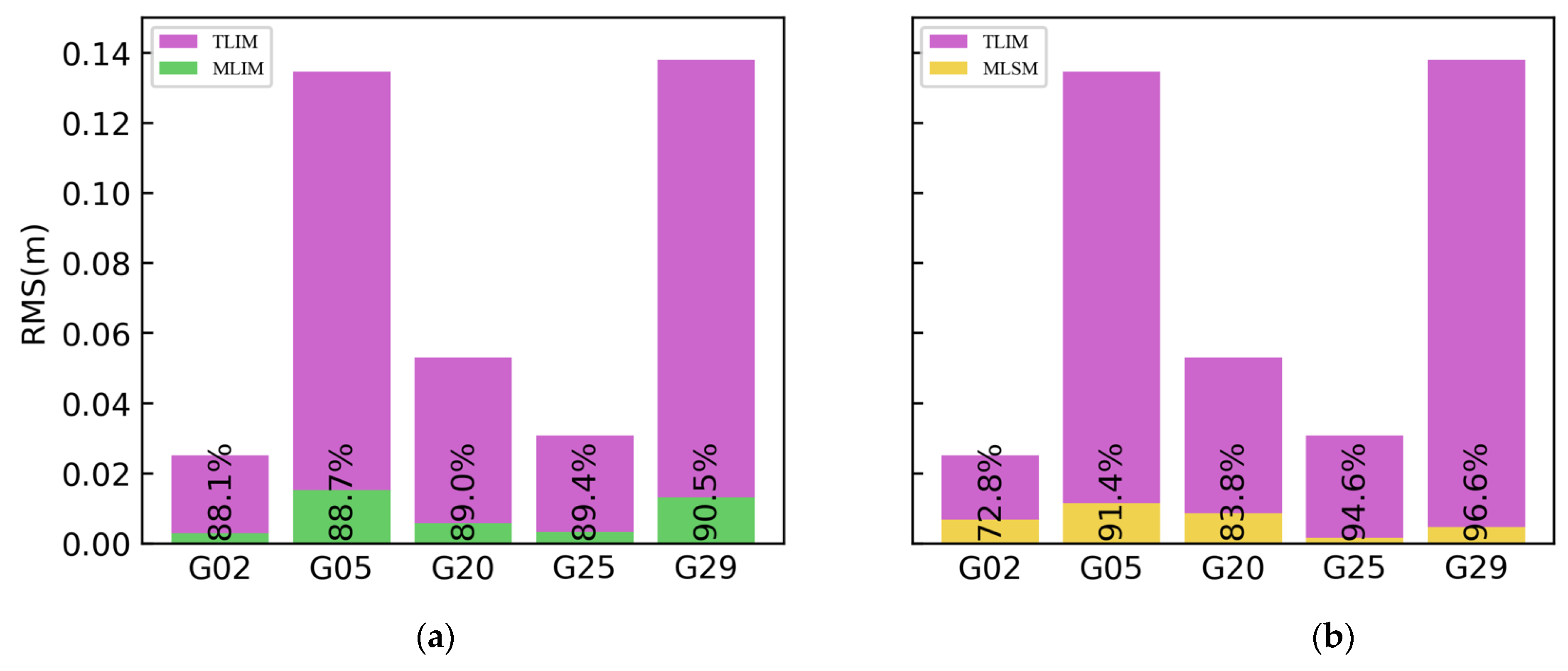
3.3. Comparison of the Positioning Results for Different Interpolation Methods
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wanninger, L. Virtual reference stations (VRS). GPS Solut. 2003, 7, 143–144. [Google Scholar] [CrossRef]
- Hu, G.R.; Khoo, H.S.; Goh, P.C.; Law, C.L. Development and assessment of GPS virtual reference stations for RTK positioning. J. Geod. 2003, 77, 292–302. [Google Scholar] [CrossRef]
- Chen, X.; Han, S.; Rizos, C.; Goh, P.C. Improving real time positioning efficiency using the Singapore integrated multiple reference station network (SIMRSN). In Proceedings of the 13th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000. [Google Scholar]
- Wanninger, L. Improved ambiguity resolution by regional differential modelling of the ionosphere. In Proceedings of the 8th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1995), Palm Springs, CA, USA, 12–15 September 1995. [Google Scholar]
- Wanninger, L. The performance of virtual reference stations in active geodetic GPS-networks under solar maximum conditions. In Proceedings of the 12th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1999), Nashville, TN, USA, 14–17 September 1999. [Google Scholar]
- Han, S.; Rizos, C. GPS network design and error mitigation for real-time continuous array monitoring systems. In Proceedings of the 9th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1996), Kansas City, MO, USA, 17–20 September 1996. [Google Scholar]
- Gao, Y.; Li, Z.; McLellan, J. Carrier phase based regional area differential GPS for decimeter-level positioning and navigation. In Proceedings of the 10th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1997), Kansas City, MO, USA, 16–19 September 1997. [Google Scholar]
- Wübbena, G.; Bagge, A.; Seeber, G.; Böder, V.; Hankemeier, P. Reducing distance dependent errors for real-time precise DGPS applications by establishing reference station networks. In Proceedings of the ION GPS, Kansas City, MO, USA, 17–19 September 1996. [Google Scholar]
- Dai, L.; Han, S.; Wang, J.; Rizos, C. Comparison of interpolation algorithms in network-based GPS techniques. Navig. J. Inst. Navig. 2003, 50, 277–293. [Google Scholar] [CrossRef]
- Fotopoulos, G.; Cannon, M. An overview of multi-reference station methods for cm-level positioning. GPS Solut. 2001, 4, 1–10. [Google Scholar] [CrossRef]
- Wu, S. Performance of Regional Atmospheric Error Models for NRTK in GPSnet and the Implementation of a NRTK System. Ph.D. Thesis, RMIT University, Melbourne, Australia, 2009. [Google Scholar]
- Al-Shaery, A.; Lim, S.; Rizos, C. Investigation of different interpolation models used in Network-RTK for the virtual reference station technique. J. Glob. Position Syst. 2011, 10, 136–148. [Google Scholar] [CrossRef]
- Wielgosz, P.; Cellmer, S.; Rzepecka, Z.; Paziewski, J.; Grejner-Brzezinska, D.A. Troposphere modeling for precise GPS rapid static positioning in mountainous areas. Meas. Sci. Technol. 2011, 22, 045101. [Google Scholar] [CrossRef]
- Liangke, H.; Lilong, L.; Chaolong, Y. A zenith tropospheric delay correction model based on the regional CORS network. Geod. Geodyn. 2012, 3, 53–62. [Google Scholar] [CrossRef]
- Yin, H.; Huang, D.; Xiong, Y. Regional tropospheric delay modeling based on GPS reference station network. In Proceedings of the VI Hotine-Marussi Symposium on Theoretical and Computational Geodesy, Wuhan, China, 29 May–2 June 2006. [Google Scholar]
- Landau, H.; Vollath, U.; Chen, X. Virtual reference stations versus broadcast solutions in network RTK–advantages and limitations. In Proceedings of the GNSS, Graz, Austria, 22–25 April 2003. [Google Scholar]
- Wu, B.; Gao, C.; Pan, S.; Deng, J.; Gao, W. Regional modeling of atmosphere delay in network rtk based on multiple reference station and precision analysis. In China Satellite Navigation Conference (CSNC) 2015 Proceedings: Volume II; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Lei, Q.; Lei, L.; Zemin, W. An tropospheric delay model for GPS NET RTK. In Proceedings of the 2010 Second International Conference on Information Technology and Computer Science, Kiev, Ukraine, 24–25 July 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Shi, J.; Xu, C.; Guo, J.; Gao, Y. Local troposphere augmentation for real-time precise point positioning. Earth Planets Space 2014, 66, 30. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, Y.; Li, W.; Zhang, B.; Ou, J. A grid-based tropospheric product for China using a GNSS network. J. Geod. 2018, 92, 765–777. [Google Scholar] [CrossRef]
- Zheng, F.; Lou, Y.; Gu, S.; Gong, X.; Shi, C. Modeling tropospheric wet delays with national GNSS reference network in China for BeiDou precise point positioning. J. Geod. 2018, 92, 545–560. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, Y.; Li, W. Real-time wide-area precise tropospheric corrections (WAPTCs) jointly using GNSS and NWP forecasts for China. J. Geod. 2022, 96, 44. [Google Scholar] [CrossRef]
- Pu, Y.; Song, M.; Yuan, Y.; Che, T. Triple-frequency ambiguity resolution for GPS/Galileo/BDS between long-baseline network reference stations in different ionospheric regions. GPS Solut. 2022, 26, 146. [Google Scholar] [CrossRef]
- Hu, G.; Abbey, D.A.; Castleden, N.; Featherstone, W.E.; Earls, C.; Ovstedal, O.; Weihing, D. An approach for instantaneous ambiguity resolution for medium-to long-range multiple reference station networks. GPS Solut. 2005, 9, 1–11. [Google Scholar] [CrossRef]
- Yuan, Y.; Ou, J. An improvement to ionospheric delay correction for single-frequency GPS users–the APR-I scheme. J. Geod. 2001, 75, 331–336. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric effects on GPS. In Global Positioning System Theory & Applications; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1991; Volume 1, pp. 517–546. [Google Scholar]
- Yuan, Y.; Wang, N.; Li, Z.; Huo, X. The BeiDou global broadcast ionospheric delay correction model (BDGIM) and its preliminary performance evaluation results. Navigation 2019, 66, 55–69. [Google Scholar] [CrossRef]
- Øvstedal, O. Absolute Positioning with Single-Frequency GPS Receivers. GPS Solut. 2002, 5, 33–44. [Google Scholar] [CrossRef]
- Leandro, R.F.; Langley, R.B.; Santos, M.C. UNB3m_pack: A neutral atmosphere delay package for radiometric space techniques. GPS Solut. 2008, 12, 65–70. [Google Scholar] [CrossRef]
- Niell, A.E. Global Mapping Functions for the Atmosphere Delay at Radio Wavelengths. J. Geophys. Res. Solid Earth 1996, 101, 3227–3246. [Google Scholar] [CrossRef]
- Zhang, J.; Lachapelle, G. Precise estimation of residual tropospheric delays using a regional GPS network for real-time kinematic applications. J. Geod. 2001, 75, 255–266. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-square ambiguity decorrelation adjustment: A method for fast GPS ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, X.; Xu, C.; Peng, W.; Wan, Y. Establishment of a Real-Time Local Tropospheric Fusion Model. Remote Sens. 2019, 11, 1321. [Google Scholar] [CrossRef]
- Bartels, J. The technique of scaling indices K and Q of geomagnetic activity. Ann. Intern. Geophys. 1957, 4, 215–226. [Google Scholar]
- Mireault, Y.; Tétreault, P.; Lahaye, F.; Héroux, P.; Kouba, J. Online precise point positioning. GPS World 2008, 19, 59–64. [Google Scholar]
- Guo, Q. Precision comparison and analysis of four online free PPP services in static positioning and tropospheric delay es-timation. GPS Solut. 2015, 19, 537–544. [Google Scholar] [CrossRef]
- Xiao, G.; Liu, G.; Ou, J.; Liu, G.; Wang, S.; Guo, A. MG-APP: An open-source software for multi-GNSS precise point positioning and application analysis. GPS Solut. 2020, 24, 66. [Google Scholar] [CrossRef]
- Xiao, G.; Liu, G.; Ou, J.; Zhou, C.; He, Z.; Chen, R.; Guo, A.; Yang, Z. Real-time carrier observation quality control algorithm for precision orbit determination of LEO satellites. GPS Solut 2022, 26, 102. [Google Scholar] [CrossRef]
- Liu, S.; Yuan, Y. Generating GPS decoupled clock products for precise point positioning with ambiguity resolution. J. Geod. 2022, 96, 6. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset 1 | E (cm) | N (cm) | U (cm) |
|---|---|---|---|
| TLIM | 5.4 | 5.9 | 40.9 |
| MLIM | 1.1 | 1.6 | 5.1 |
| MLSM | 1.6 | 1.8 | 5.1 |
| System | Method | E (cm) | N (cm) | U (cm) |
|---|---|---|---|---|
| GPS | TLIM | 1.0 | 1.4 | 14.6 |
| MLIM | 1.0 | 1.0 | 6.8 | |
| MLSM | 1.3 | 1.3 | 3.9 | |
| BDS | TLIM | 0.6 | 0.7 | 11.3 |
| MLIM | 0.4 | 0.7 | 4.2 | |
| MLSM | 0.6 | 1.0 | 2.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Pu, Y.; Yuan, Y.; Zhang, H.; Song, M. Improvement and Comparison of Multi-Reference Station Regional Tropospheric Delay Modeling Method Considering the Effect of Height Difference. Atmosphere 2023, 14, 83. https://doi.org/10.3390/atmos14010083
Wang Y, Pu Y, Yuan Y, Zhang H, Song M. Improvement and Comparison of Multi-Reference Station Regional Tropospheric Delay Modeling Method Considering the Effect of Height Difference. Atmosphere. 2023; 14(1):83. https://doi.org/10.3390/atmos14010083
Chicago/Turabian StyleWang, Yifan, Yakun Pu, Yunbin Yuan, Hongxing Zhang, and Min Song. 2023. "Improvement and Comparison of Multi-Reference Station Regional Tropospheric Delay Modeling Method Considering the Effect of Height Difference" Atmosphere 14, no. 1: 83. https://doi.org/10.3390/atmos14010083
APA StyleWang, Y., Pu, Y., Yuan, Y., Zhang, H., & Song, M. (2023). Improvement and Comparison of Multi-Reference Station Regional Tropospheric Delay Modeling Method Considering the Effect of Height Difference. Atmosphere, 14(1), 83. https://doi.org/10.3390/atmos14010083