Abstract
The detection and prediction of sea clutter power is the basis of inversing atmospheric duct. At present, the technology of atmospheric duct within radar detection range is relatively perfect, but the long-distance inversion of atmospheric duct is limited by radar detection range, and the prediction of the echo power of the measured sea clutter is the basis of long-distance inversion of atmospheric duct. Based on the theory of weighted Markov model and grey Markov model, a weighted grey Markov model is constructed, and the sliding method is introduced to establish the sliding weighted grey Markov model. The relative error between the measured sea clutter power and predicted values of the above four models is calculated and analyzed using the experimental data collected. The results show that the sliding weighted grey Markov model has better accuracy not only in short-range prediction but also in long-distance prediction, which could provide data support for inversing atmospheric duct.
1. Introduction
Because radar sea clutter, in the propagation process, carries information on atmospheric refractive index and is affected by atmospheric factors, refractivity from clutter (RFC) uses the transmission characteristics of radar sea clutter in the atmospheric duct to obtain the atmospheric corrected refractive profile, which has become an important means of obtaining atmospheric duct [1,2]. Karimian [3] summarized the development status of RFC, Rogers [1] described a method for inferring the evaporation duct height from sea clutter using data from the Wallops’ 98 measurement campaign, Gerstoft [4] gave the basic method of RFC and gave a method of inversion of horizontal range-dependent evaporation duct from radar sea clutter. Domestic scientific research institutes have carried out research on RFC [5,6,7]. Therefore, the detection of sea clutter echo power is the basis of inversing atmospheric duct. However, the research on RFC is limited by the radar detection distance, and only improves the inversion accuracy of range-dependent or non-atmospheric duct by perfecting the calculation method [8,9,10,11]. Therefore, the prediction of the echo power of the measured sea clutter is the basis of long-distance inversion of atmospheric duct, but there is a lack of research on the prediction of the measured sea clutter beyond radar detection distance.
The Markov model has higher prediction accuracy for discrete-time random data series, so it is the preferred method for many prediction problems. In recent years, many scholars have continuously improved the Markov model and established the weighted Markov model and the grey Markov model. At present, the Markov model is widely used in so many fields, such as communication, computer, meteorology, atmosphere, and other areas [12,13,14,15,16,17].
In view of the lack of research on long-distance atmospheric duct inversion, the echo power of sea clutter, in this paper, is predicted beyond the radar detection range, which lays a theoretical foundation for radar sea clutter inversion of long-distance atmospheric duct. The sea clutter power is a discrete random array sequence in the range direction, and the sea clutter power of the next position is only related to the power of the previous positions, therefore, it could be regarded as a stochastic process in discrete distance and the same properties as the discrete-time Markov process. However, the traditional grey Markov model simply takes the midpoint of the interval as the value in the quantitative solution, so the value has great randomness, and the array structure cannot be optimized in time by using the latest information of the array in the multi-step continuous prediction. In this paper, fuzzy set theory and sliding method are introduced to improve the grey Markov model, then, the improved grey Markov model is compared with the traditional grey Markov model to analyze the prediction accuracy, and a comparative analysis is given by using the experimental data collected. Finally, it comes to the conclusion that the improved grey Markov model has better prediction accuracy than traditional models and could provide data support for inversing atmospheric duct.
2. Markov Model and Fuzzy Set Theory
2.1. Markov Model
The Markov model is a common method to predict data series with no aftereffect, and its characteristics are that the future state is related to the current state, not affected by the past state, and it has high prediction accuracy. Therefore, it is the preferred method for most prediction problems.
The parameter set T of the Markov process, , is a discrete time set. However, for sea clutter power prediction, the detection distance of radar is relatively close, and the electromagnetic wave propagates at the speed of light, so it can be considered that sea clutter power on the same path is detected at the same time. What is more, sea clutter power is a stochastic sequence in the discrete range and has the characteristics that the sea clutter power of the latter position is only related to the several previous positions. Therefore, sea clutter power can be regarded as a stochastic process of discrete distance with Markov property, , and has the same properties as the discrete time Markov process.
2.2. Fuzzy Set Theory
When using the Markov model to predict, the influence of the present state on the latter state is usually considered, but several previous states may also affect the latter state. Therefore, the autocorrelation coefficient of each order is used as the influence weight of the several previous states on the latter state, and finally, the weighted sum of each state probability is used to predict the next state. The state level and its value range of the latter position can be predicted by the weighted Markov model, and the quantitative prediction can be calculated by using the level characteristics value in the fuzzy set theory.
2.2.1. Calculation Method of State Level, Transition Matrix, and State Prediction
According to the statistical method, the mean value ()-standard deviation () method is used to grade the measured values, and the sample is divided into five states, as shown in Table 1.

Table 1.
State classification standard of mean value ()-standard () deviation method.
According to the frequency, the transition probability can be calculated, assuming that is the frequency of the measured value from state i to state j in one step, the one-step transition probability can be expressed as Equation (1).
One-step transition matrix P and n steps transition matrix P^(n) can be obtained from Equation (1).
According to the full probability formula, the state of the measured value at position s is i, then the probability vector of the predicted value that is at state j after k steps transfer is Equation (2).
where m is the total number of states, is the probability that measured value is state i at position s.
The state of the predicted value at position can be calculated due to .
2.2.2. Quantitative Prediction Based on Fuzzy Set Theory
According to fuzzy set theory, the K-order correlation coefficient could be expressed as Equation (3).
The weight factor could be expressed as Equation (4).
where N is the number of samples, n is the total order of correlation coefficient.
The state of the predicted value is the position corresponding to the largest element after the weighted average of probability vectors with different steps. What is more, the weight set, , composed of the weights of each state can be obtained, could be expressed as Equation (5).
where i is the state level, is the probability that the predicted value is state i, is the maximum probability action coefficient, usually taken as 2 [18].
State eigenvalue H can be expressed as Equation (6)
According to [19], the method of quantitative prediction using state eigenvalues is as Equation (7).
where i is the state determined according to the maximum probability, and are the upper and lower limits of the corresponding interval of state i.
3. Grey Markov Model
3.1. GM (1,1) Model
The main principle of the grey model is to obtain a group of data, , with certain regularity from the irregular original sample data, by accumulation or subtraction method, and accumulation is selected as Equation (8).
and construct matrix B and vector . The expression is as Equation (9).
The modeling process of the grey system adopts a differential fitting method, GM (1,1) model is widely used. The specific process is as Equation (10):
The parameter u is the grey action quantity, and it can reflect the relationship of change data, whose exact meaning is grey. The parameter a is the development coefficient, and it is related to GM (1,1). The relationship is shown in Table 2.
Table 2.
The relationship of development coefficient a and applicable scope of GM (1,1) model.
is called coefficient vector, and it can be solved by the least square method. The result is expressed as Equation (11).
Then, the response sequence of GM (1,1) model is expressed as Equation (12).
The fitting value of the original sample data is expressed as Equation (13).
3.2. Grey Markov Model
is original sample data, and is the fitting value of the original data, , at position s. According to GM (1,1), is the predicted value of the fitting value at position k. The specific modeling method is as follows:
According to residual relative value, , the state level is divided as shown in Table 3, where is the minimum of residual relative value, is the maximum.
Table 3.
State level division.
According to Section 2.2.1, the 1–5 step state transition probability matrix, , can be calculated, and the predicted state can be obtained. The result is expressed as shown in Table 4.
Table 4.
State prediction of residual relative value.
From Table 4, can be solved. Assuming that the probability of state i is the largest, then the residual relative value is in the corresponding interval of state i, so the predicted residual relative value is most likely the midpoint of the interval. From GM (1,1) model, the fitting value, , could be calculated, then according to the definition of residual relative value, the predicted value of the original sample at position k, , can be expressed as Equation (14).
where i is the state determined according to the maximum probability, and are the upper and lower limits of the corresponding interval of state i.
4. Improved Grey Markov Model
However, the traditional grey Markov model simply takes the midpoint of the interval as the value in the quantitative solution, so the value has great randomness, and the array structure cannot be optimized in time by using the latest information of the array in the multi-step continuous prediction. Therefore, fuzzy set theory and sliding method are introduced to improve the grey Markov model.
4.1. Weighted Grey Markov Model
On the basis of GM (1,1) model in Section 2, fuzzy set theory is used to quantitatively predict residual relative value at position k, instead of the midpoint. According to the weighted Markov model,
The K-order correlation coefficient and weight factor can be expressed as Equations (4) and (15).
where N is the number of samples, n is the total order of correlation coefficient.
Then, according to Equations (5)–(7), the quantitative result of residual relative value can be calculated, from Equation (14), the predicted value of the original sample at position k, , can be obtained.
4.2. Sliding Weighted Grey Markov Model
When predicting the sea clutter power, at a long distance, , with the increase of the number of sample, the impact of the remote original data on the prediction will continue to decrease, so they would lose reference significance. In this way, the remote data should be constantly deleted from the original data, and new predicted values should be added to form a new research system, then prediction could be continuously and accurately carried out. As an improved model of the weighted grey Markov model, the sliding method is to optimize the system structure by using the latest predicted information. Specifically, at first, assuming that the original sample is , the predicted value at position n + 1, , can be calculated from the weighted grey Markov model, secondly, the remote data would be deleted, and the latest data, , would be added, then a new sample, could be obtained, then , according to the model, , could be calculated.
5. Application of Models
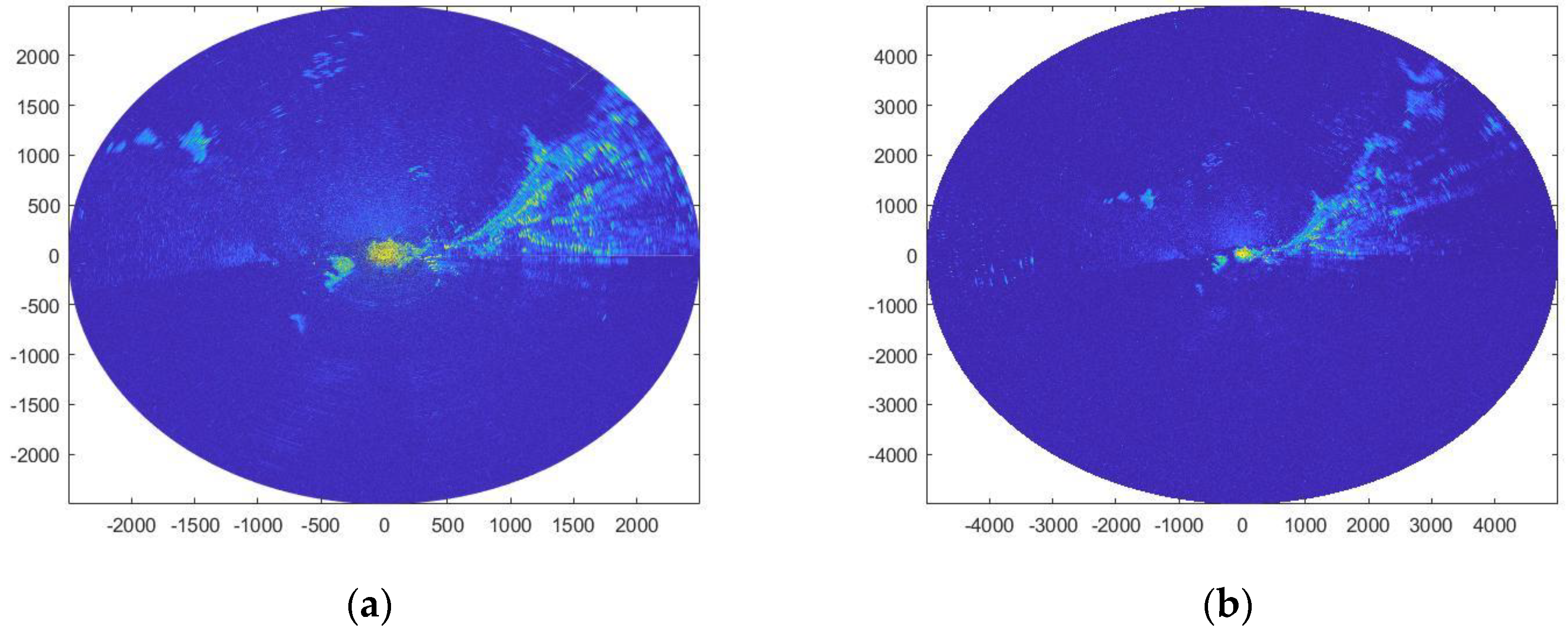
In this paper, a certain type of magnetic control pulse sea detection radar was used, and the radar was set up along the coast of a certain sea area in the Yellow Sea and the Bohai Sea in early December 2021. The result of sea clutter power is shown in Figure 1 where x-axis and y-axis are the numbers of positions detected by radar.
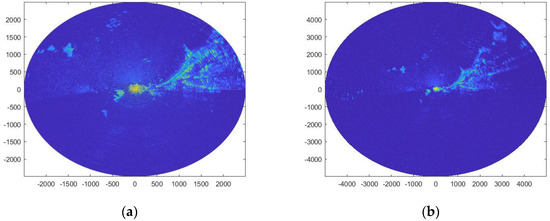
Figure 1.
The measured sea clutter power. (a) The echo power of sea clutter within 6 km, (b) the echo power of sea clutter within 6 km.
In Figure 1, the radar was set up at center of circle that is axis origin, and it can detect sea clutter in all directions. The brightness of the circular area in the Figure 1 reflects the intensity of the sea clutter echo power. The brighter the area is, the higher the intensity is. The detection range of the radar is reflected by the values of x-axis and y-axis. Specifically, the value of axis is the detection position of the radar, and one position is 2.4 m, so Figure 1a shows the echo power of sea clutter within 6 km and Figure 1b is 12 km. It can be seen that in North-East in Figure 1, there was atmospheric duct. What is more, from Figure 1, we can see the sea clutter power of later positions is related to the power of the previous positions, and the echo power of sea clutter decreases with the increase of propagation distance.
A group of the same samples is randomly selected, and the weighted Markov model, grey Markov model, the weighted grey Markov model, and the sliding weighted grey Markov model are used to predict sea clutter power at the latter position and in long distance.
5.1. Weighted Markov Model
According to the mean value ()-standard deviation () method, sea clutter power at the last 200 positions of the sample is divided into five states as shown in Table 5, where and .
Table 5.
State division of sea clutter power.
One-step transition matrix P, n steps transition matrix , k-order correlation coefficient and weight factor can be calculated, as shown in Table 6 and Equation (16).
Table 6.
Correlation coefficient and weight factor of each order.
The state of the sea clutter power of the latter position can be predicted from the states of the last five positions of the sample, as shown in Table 7.
Table 7.
State prediction of the sea clutter power of the latter position.
From Table 7 and Equations (5) and (6), the state eigenvalue, H, can be calculated, then the sea clutter power of the latter position can be obtained, as shown in Table 8.
Table 8.
Quantitative prediction of the sea clutter power of the latter position.
5.2. Grey Markov Model
According to the GM (1,1) model, the fitting value of sea clutter power at the last 200 positions of the sample can be calculated, then, from the grey Markov model, the sea clutter power of the latter position can be obtained as shown in Table 9, Table 10 and Table 11.
Table 9.
State level division of residual relative value (q).
Table 10.
State prediction of residual relative value by the grey Markov model.
Table 11.
Quantitative prediction of the sea clutter power of the latter position by the grey Markov model.
5.3. Improved Grey Markov Model
Two improved grey Markov models, the weighted grey Markov model and the sliding weighted grey Markov model, have the same result when only predicting the sea clutter power of the latter position, but when predicting for long distance, they have significant differences.
According to Section 3, the sea clutter power of the latter position can be obtained as shown in Table 12, Table 13 and Table 14.
Table 12.
Correlation coefficient and weight factor of each order of the improved grey Markov model.
Table 13.
State prediction of residual relative value by the improved grey Markov model.
Table 14.
Quantitative prediction of the sea clutter power of the latter position by the improved grey Markov model.
Through the analysis of the above models, it can be seen that the relative error of the improved grey Markov model in predicting the latter position is reduced from 12.9% to 2.53%, indicating that the improved grey Markov model can improve the prediction accuracy. Next, the above four models are used to predict the long-distance sea clutter power of the same sample, and the prediction accuracy of each model will be compared. The results are shown as Table 15.
Table 15.
Comparison of prediction accuracy of four models.
5.4. Model Applicability Analysis
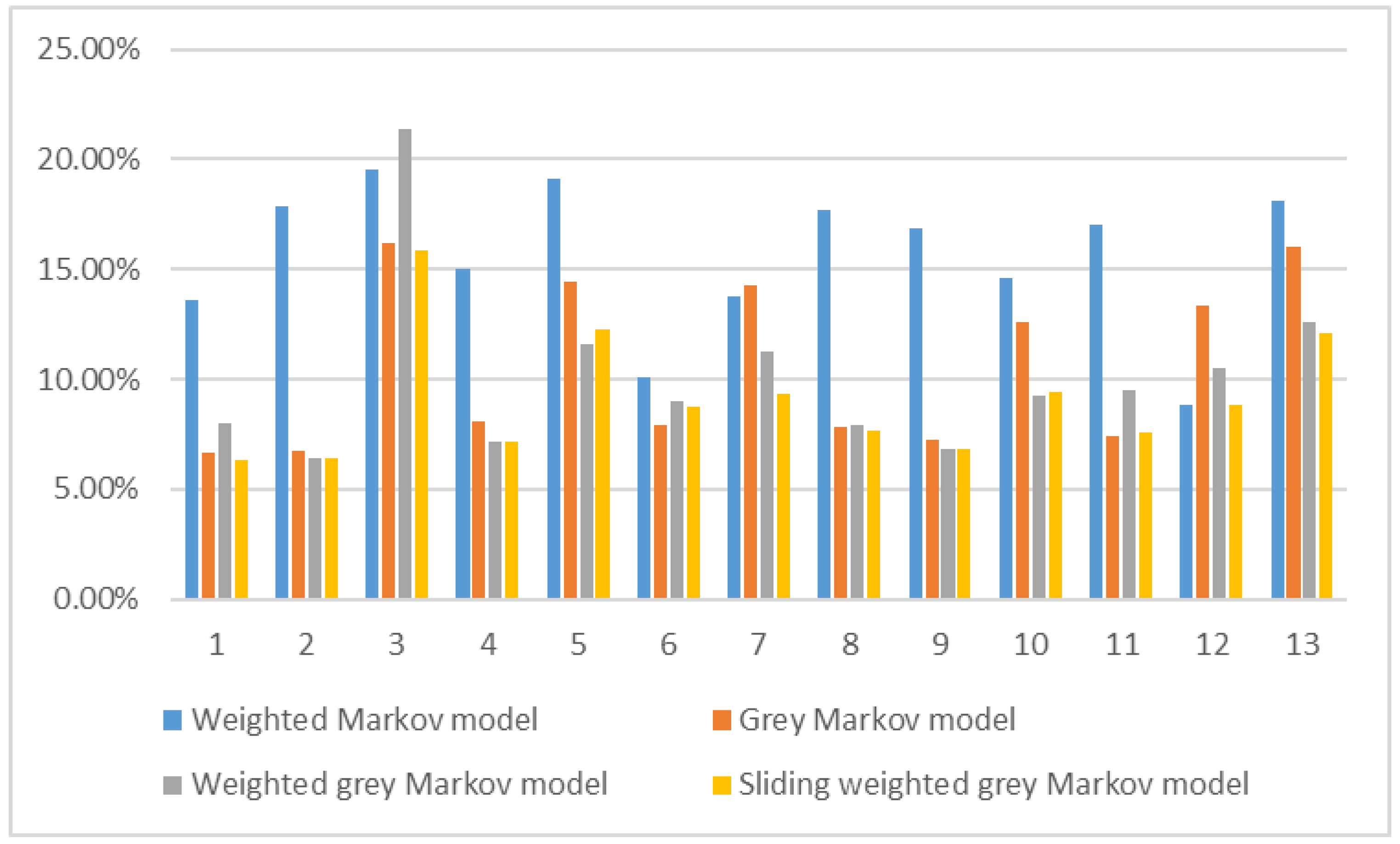
Only one sample has been analyzed in the first three sections of Chapter 4, so there is large randomness. In order to better illustrate the applicability of the sliding weighted grey Markov model, all the experimental data are calculated and analyzed, and the result is shown as Figure 2.
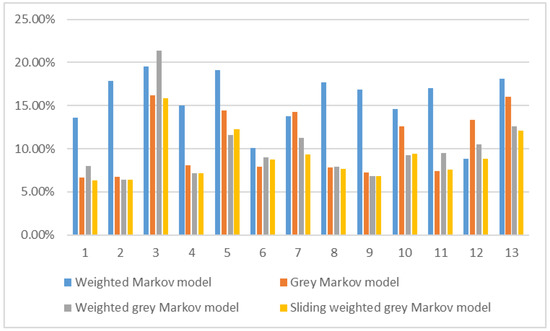
Figure 2.
Average relative error of four models.
From Figure 2, the results are as follows:
- First, the grey Markov model has better accuracy in long-distance prediction than the weighted Markov model. The reason is that the fitting value is calculated and predicted, and the fitting value is closer to the sample.
- Second, in most cases, the weighted grey Markov model is better than the grey Markov model. The reason is that residual relative value can be estimated more accurately and quantitatively by introducing the correlation coefficient and weight factor of each order. However, in a few cases, the midpoint of the interval is the better prediction of residual relative value, thus the grey Markov model is better.
- Third, among four models, the sliding weighted Markov model has the best accuracy not only for the latter point but also for long-distance prediction.
- Fourth, it can also be seen that there are some large relative errors. Through the analysis of the measured data, it is found that the sea clutter power increased abnormally in several tests of large relative error, which is judged as the discovery of targets. After deleting positions of the target power, the relative error is greatly reduced, therefore, this model should be used to predict sea clutter power.
6. Conclusions
By analyzing the weighted Markov model and GM (1,1) model and improving the grey Markov model, the sliding weighted grey Markov model is obtained. What is more, the accuracy of the model is analyzed by using the measured sea clutter power. The results show that the sliding weighted grey Markov model has better accuracy for the prediction of short or long distances. Next, on the basis of RFC, the sliding weighted grey Markov model will be used to test whether the atmospheric duct from the predicted sea clutter power could reflect the real atmospheric environment information.
Author Contributions
Conceptualization, Z.C. and B.T.; methodology, Z.C. and B.T.; software, Z.C. and B.T.; validation, Z.C. and B.T.; formal analysis, Z.C. and B.T.; data curation, Z.C. and B.T.; writing—original draft preparation, Z.C. and B.T.; writing-review and editing, Z.C., B.T., S.Z. and Q.X. All authors have read and agreed to the published version of the manuscript.
Funding
This paper is sponsored by National Natural Science Foundation of China, 41975005.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data available on request due to restrictions eg privacy. The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Rogers, L.T.; Hattan, C.P.; Stapleton, J.K. Estimating evaporation duct heights from radar sea echo. Radio Sci. 2000, 35, 955–966. [Google Scholar] [CrossRef] [Green Version]
- Karimian, A.; Yardim, C.; Gerstoft, P.; Hodgkiss, W.S.; Barrios, A.E. Multiple grazing angle sea clutter modeling. IEEE Trans. Antennas Propag. 2012, 60, 4408–4417. [Google Scholar] [CrossRef]
- Karimian, A.; Yardim, C.; Gerstoft, P.; Hodgkiss, W.S.; Barrios, A.E. Refractivity estimation from sea clutter: An invited review. Radio Sci. 2011, 46, RS6013. [Google Scholar] [CrossRef] [Green Version]
- Gerstoft, P.; Rogers, L.T.; Krolik, J.L.; Hodgkiss, W.S. Inversion for refractivity parameters from radar sea clutter. Radio Sci. 2003, 38, 8053. [Google Scholar] [CrossRef]
- Liu, A.; Cha, H.; Xi, Z.; Zhou, M. Estimation of refractivity profile from radar sea clutter and key problems. In Proceedings of the CIE International Conference on Radar, Shanghai, China, 16-19 October 2006; pp. 1705–1707. [Google Scholar]
- Zhang, J.P.; Wu, Z.S.; Zhang, Y.S.; Wang, B. Evaporation duct retrieval using changes in radar sea clutter power versus receiving height. Prog. Electromagn. Res. 2012, 126, 555–571. [Google Scholar] [CrossRef] [Green Version]
- Yang, C.; Chen, J.; Wang, Y.Z.; Guo, L.X. Improved backtracking search algorithm for atmospheric duct inversion by radar sea clutter. Syst. Eng. Electron. 2018, 40, 1743–1749. [Google Scholar]
- Ding, H.; Liu, N.B.; Dong, Y.L.; Chen, X.; Guan, J. Overview and prospects of radar sea clutter measurement experiments. J. Radars 2019, 8, 281–302. [Google Scholar]
- Yang, C.; GAO, S.; CHEN, J.; MA, H.L. A comparative study on the statistical inversion of the atmospheric duct using improved artificial bee colony algorithm. Syst. Eng. J. Xi’an Univ. Posts Telecommun. 2017, 22, 73–77. [Google Scholar]
- Zhang, J.P.; Zhang, Y.S.; Li, Q.L.; WU, J.J. A GA-PSO algorithm for evaporation duct inversion form radar sea clutter. Mod. Radar 2020, 42, 72–77. [Google Scholar]
- Zhang, Y.; Zhou, W.J.; Xing, M.N. GA-PSO algorithm for evaporation duct based on radar sea clutter. J. Ordnance Equip. Eng. 2021, 42, 239–244. [Google Scholar]
- Zhu, W.; Tian, Z.; Yue, J.G. Estimation and prediction of carbon emissions with economic growth of Jiangsu province based on Grey-Markov model. World Sci-Tech RD 2015, 37, 399–403. [Google Scholar]
- Yue, Y.; LI, T.H. The application of a fuzzy-set-theory based markov model in the quantitative prediction of water quality. J. Basic Sci. Eng. 2011, 19, 231–242. [Google Scholar]
- Chen, D.; Yuan, X. A Markov model for seasonal forecast of Antarctic sea ice. J. Clim. 2004, 17, 3156–3168. [Google Scholar] [CrossRef] [Green Version]
- Johnson, S.D.; Battisti, D.S.; Sarachik, E.S. Empirically derived Markov models and prediction of tropical pacific sea surface temperature Anomalies. J. Clim. 2000, 13, 3. [Google Scholar] [CrossRef] [Green Version]
- LV, H.; Gong, Y.F.; Wang, G.H. A linear Markov model for Indian Ocean sea surface salinity forecast and its improvement method. J. Trop. Oceanogr. 2022, 1–9. Available online: http://kns.cnki.net/kcms/detail/44.1500.P.20220323.1732.004html (accessed on 25 March 2022).
- Wang, X.Y.; Yang, C.Q. Prediction of dangerous weather influence range based on residual grey Markov model. Comput. Inf. Technol. 2022, 30, 38–41. [Google Scholar]
- Cheng, L.J.; Feng, J.M. Stock prediction based on weighted Markov model. J. Shaoguan Univ. Nat. Sci. 2021, 42, 7–11. [Google Scholar]
- Sun, C.Z.; Lin, X.Y. Research on Fuzzy Markov chain model with weights and its application in predicting the precipitation state. J. Syst. Eng. 2003, 18, 294–299. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).