
MesSBAR—Multicopter and Instrumentation for Air Quality Research

 , , , , ,
, , , , ,  , , , , , , , , , , , , , , , add
Show full author list
, , , , , , , , , , , , , , , add
Show full author list
Abstract
:1. Introduction
2. Preliminary Considerations
2.1. Requirements
2.1.1. Principal Copter Design
2.1.2. Principal Design of Measurement Payload
- As light as possible to be able to save weight for the payload and batteries;
- Stiff to prevent motions of the sensors;
- Modular to enable a modification of the sensor setup during the project;
- Sized as big as necessary to include all the subsystems but as small as possible to reduce copter flow interactions.
2.1.3. Payload for Particulate Matter
2.1.4. Payload for Gaseous Constituents
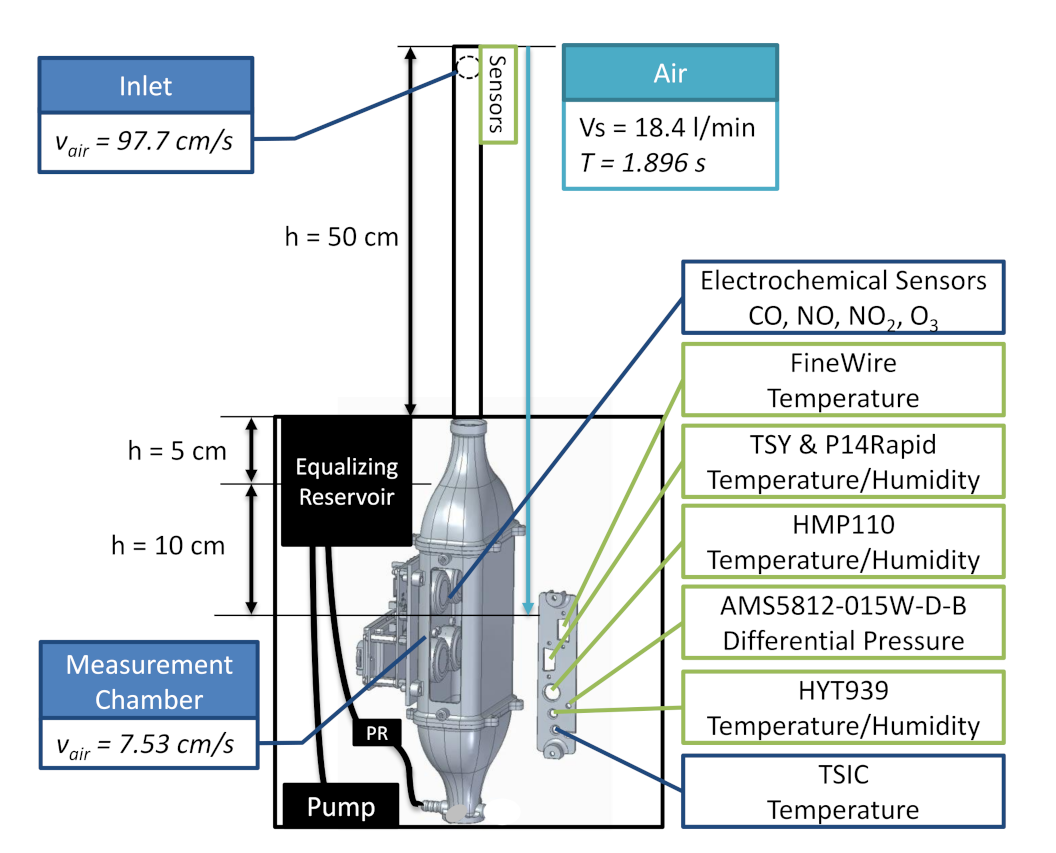
2.1.5. Inlet
2.2. Calibration
2.3. Determination of Mass Concentration of PM
2.4. Air Quality Assessment with EURAD-IM
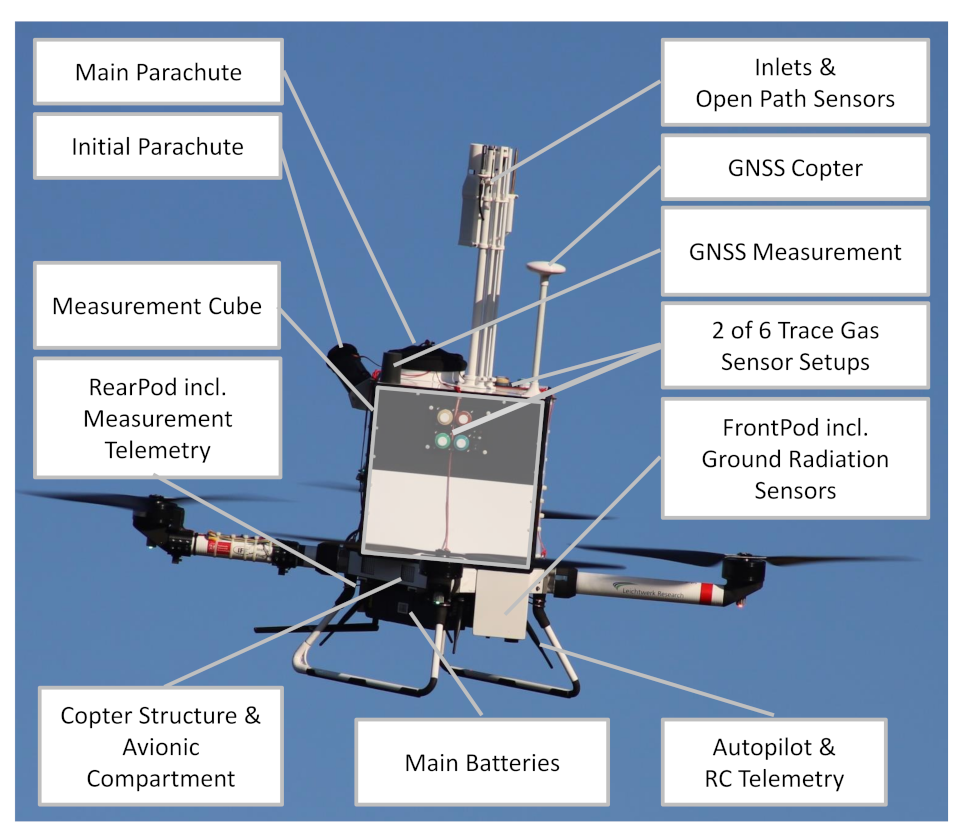
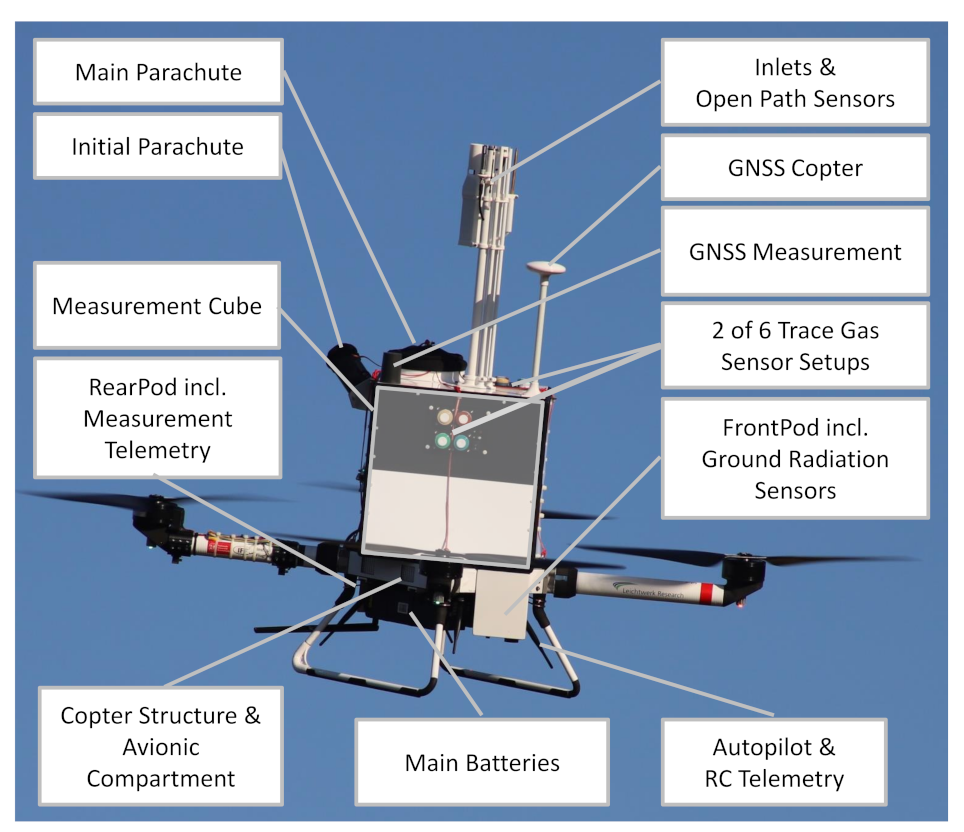
3. Multicopter System MesSBAR
3.1. Copter System
3.2. Sensor Integration
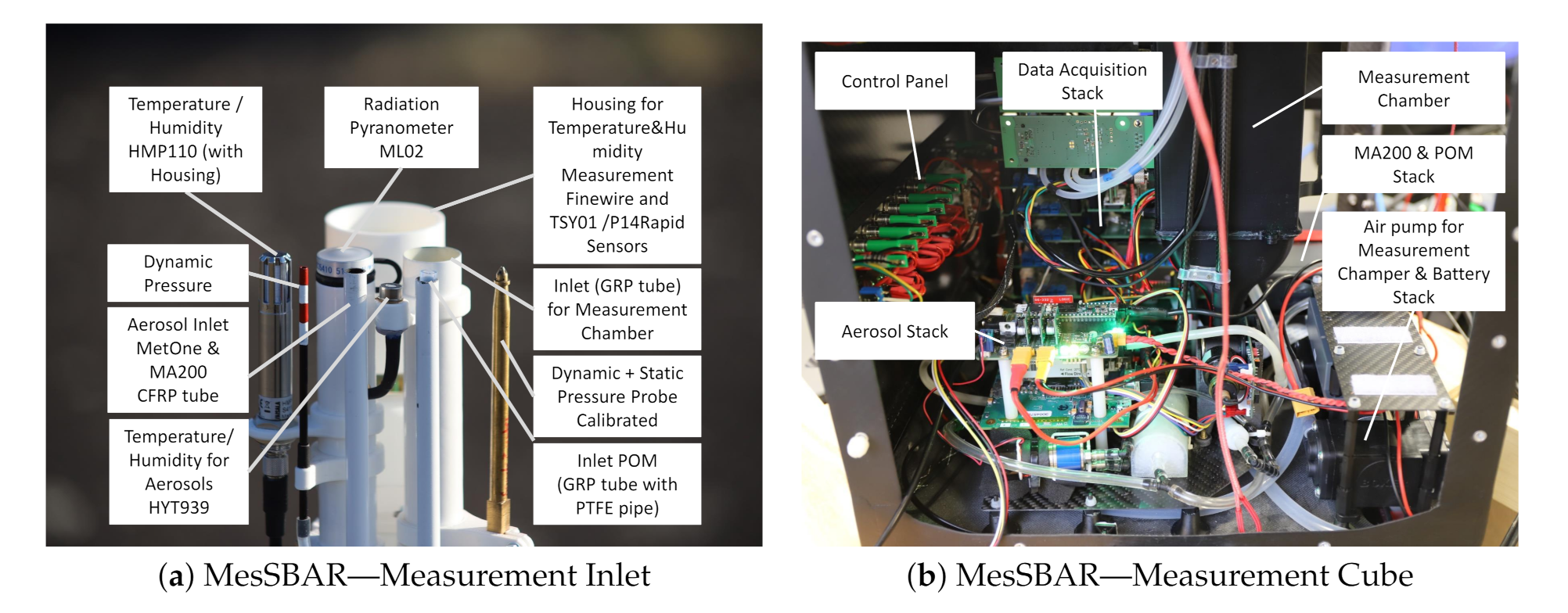
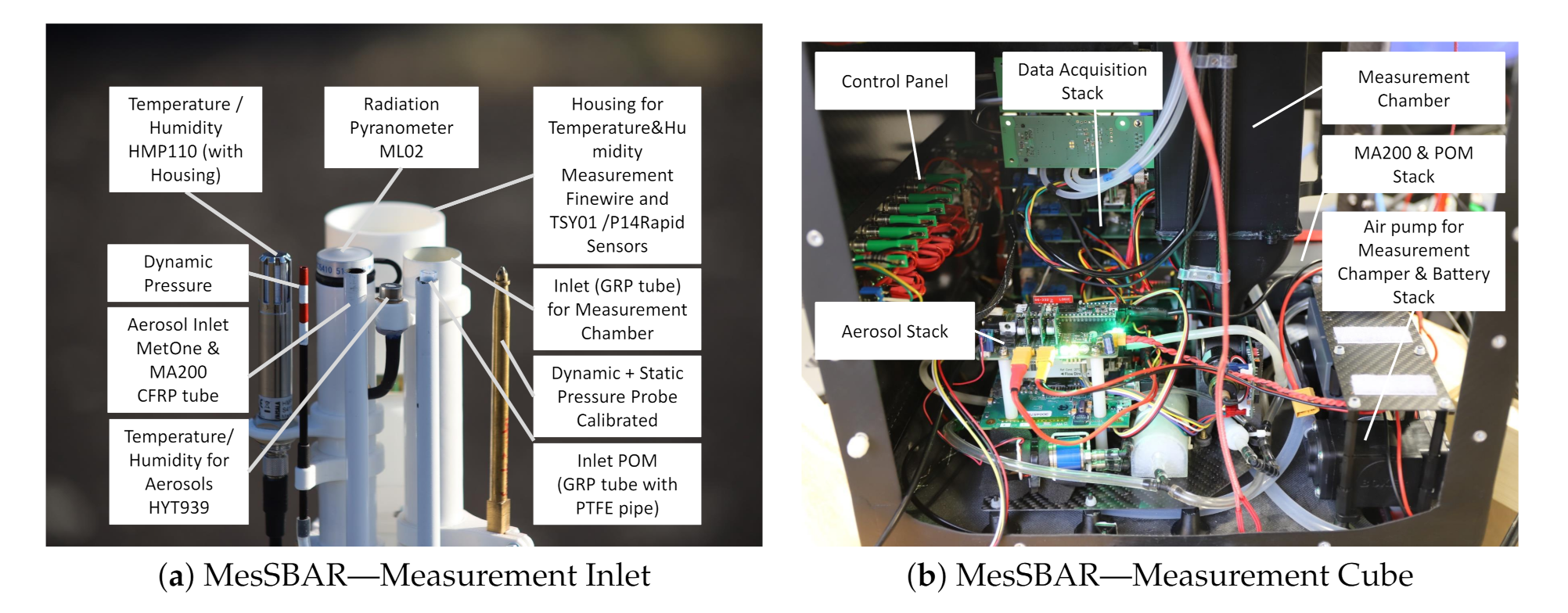
3.2.1. Inlet
3.2.2. Measurement Cube
3.2.3. Aerosol Measurements
3.2.4. Measurement Chamber
3.2.5. Trace Gas Measurements
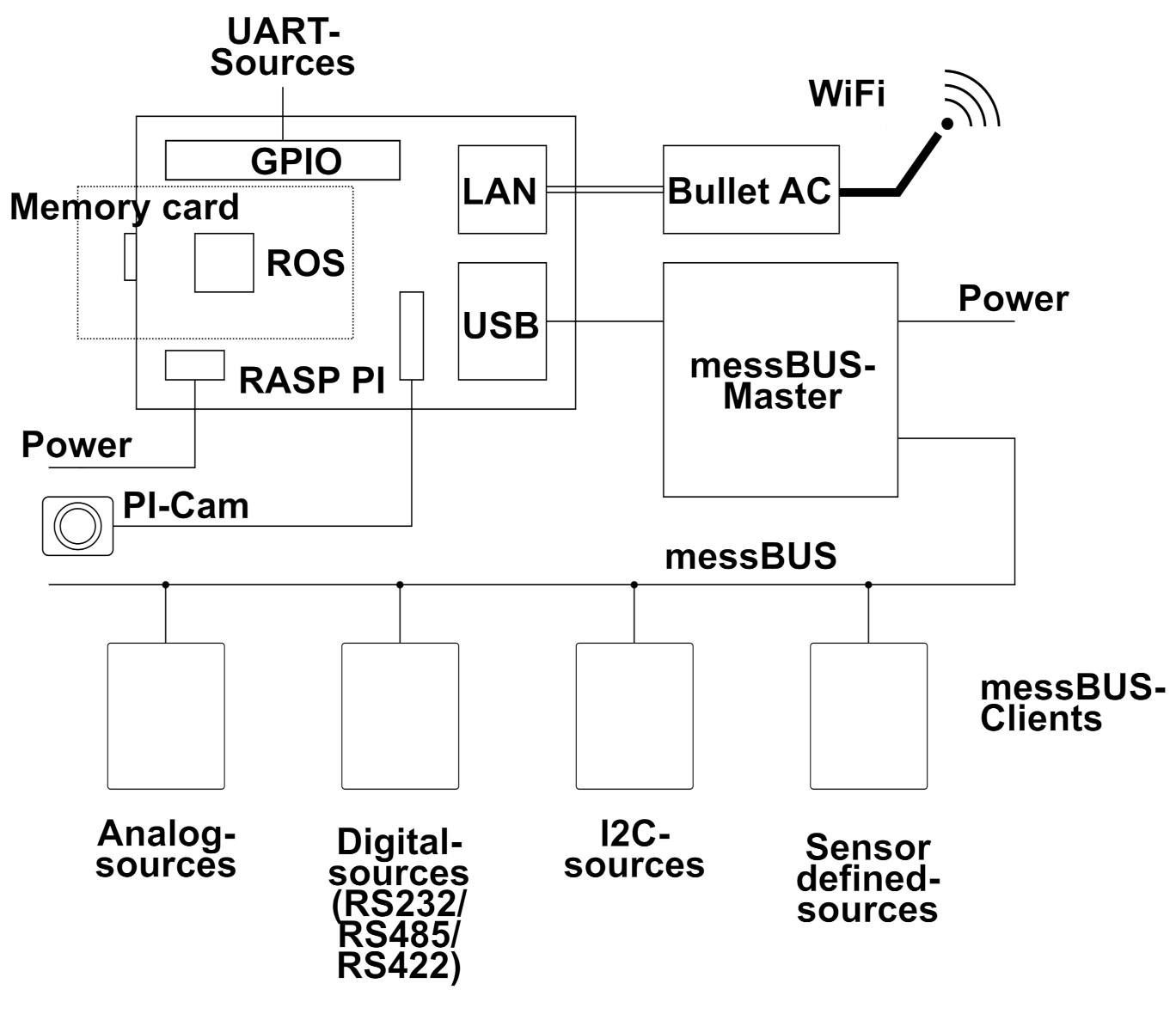
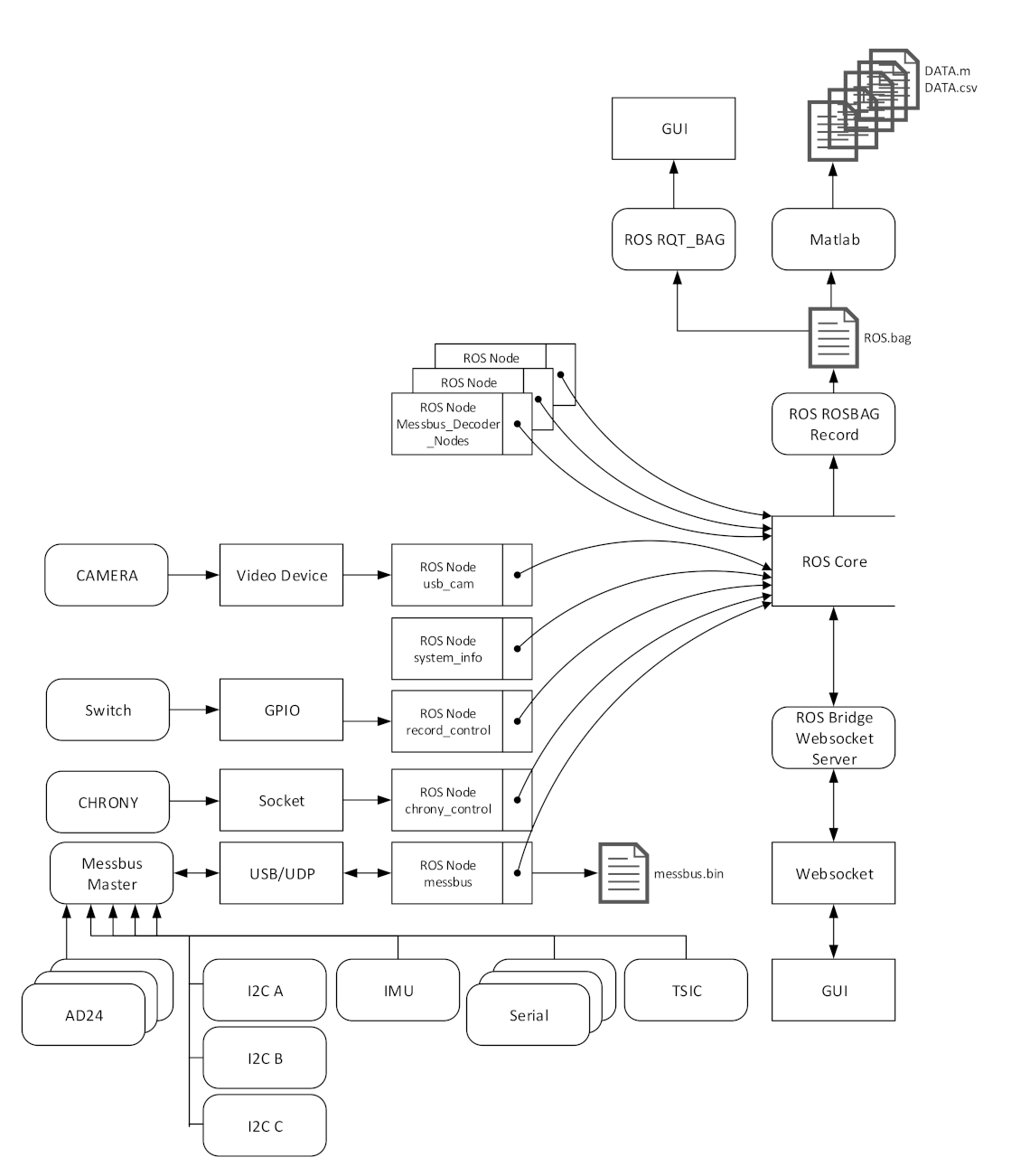
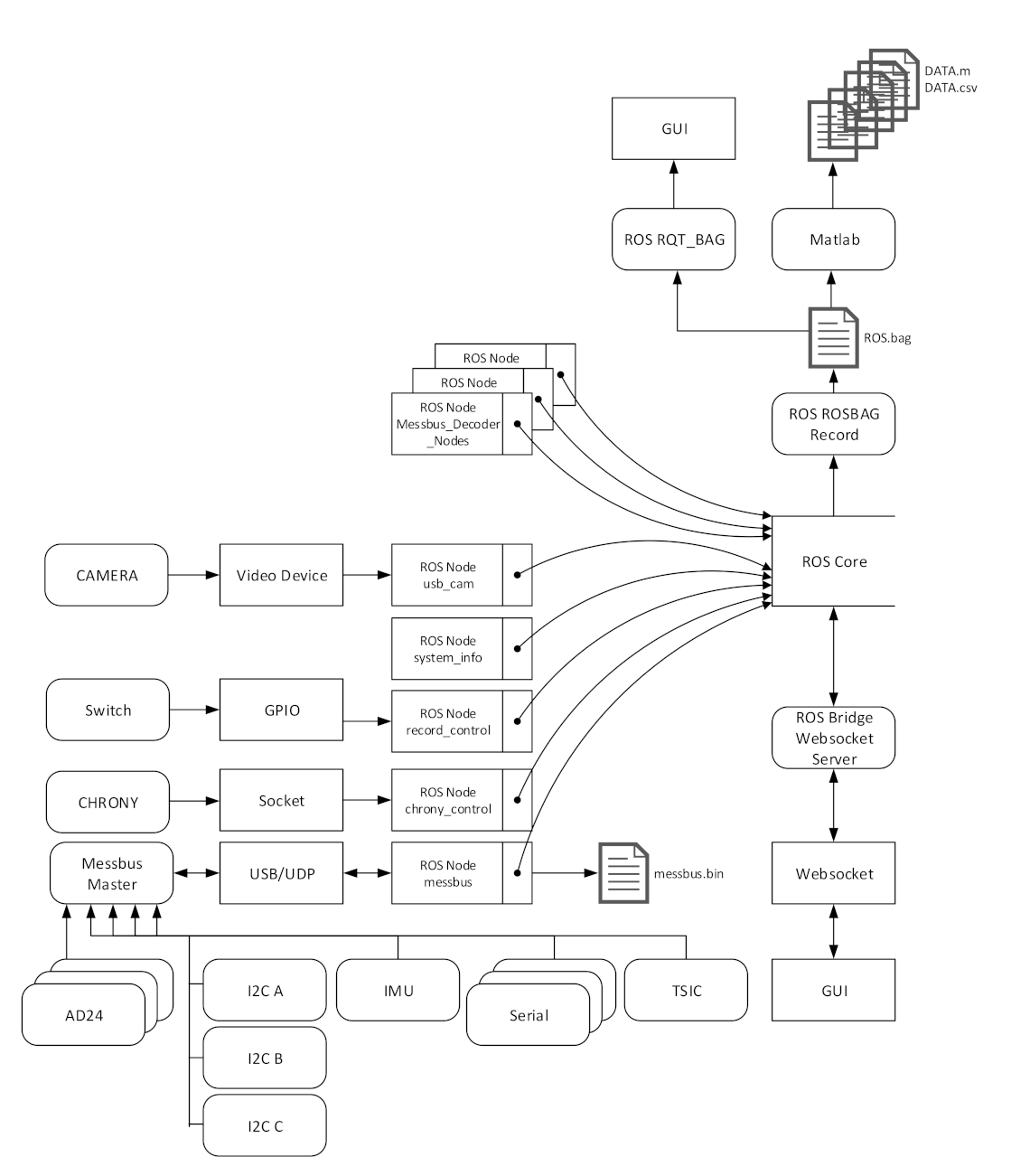
3.3. Data Acquisition and Management
4. First Applications
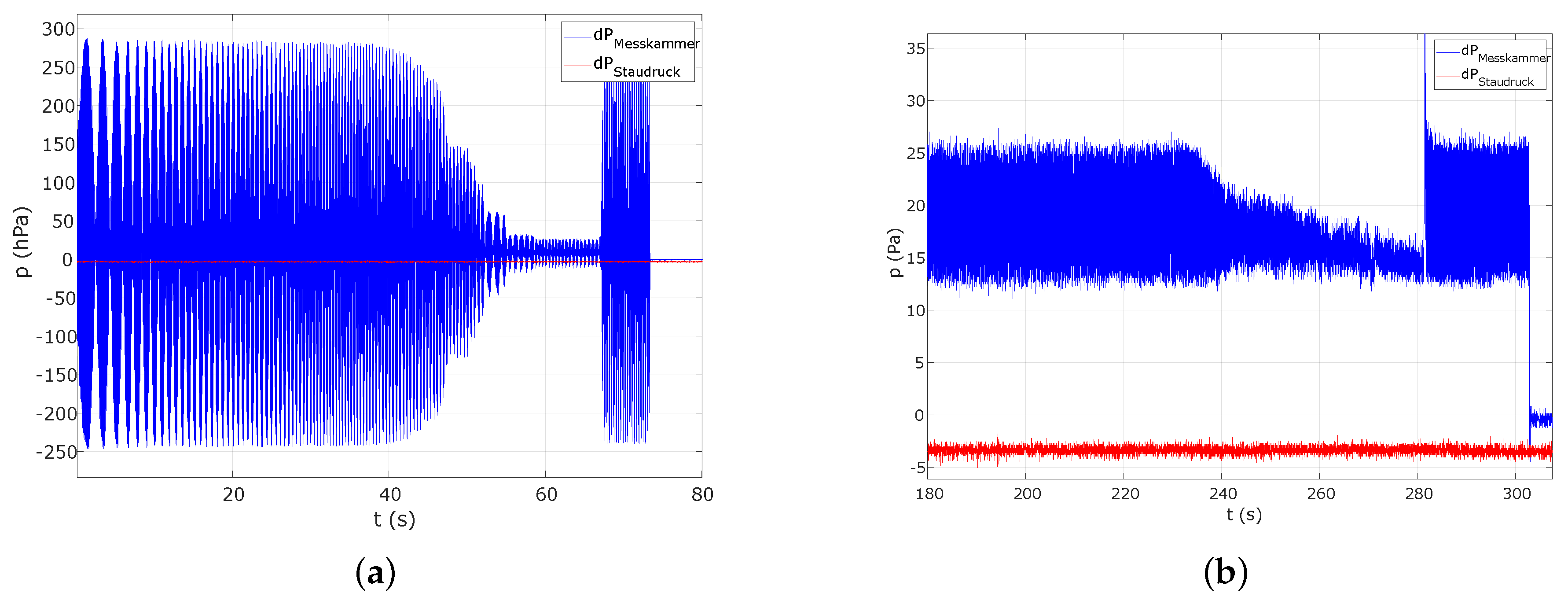
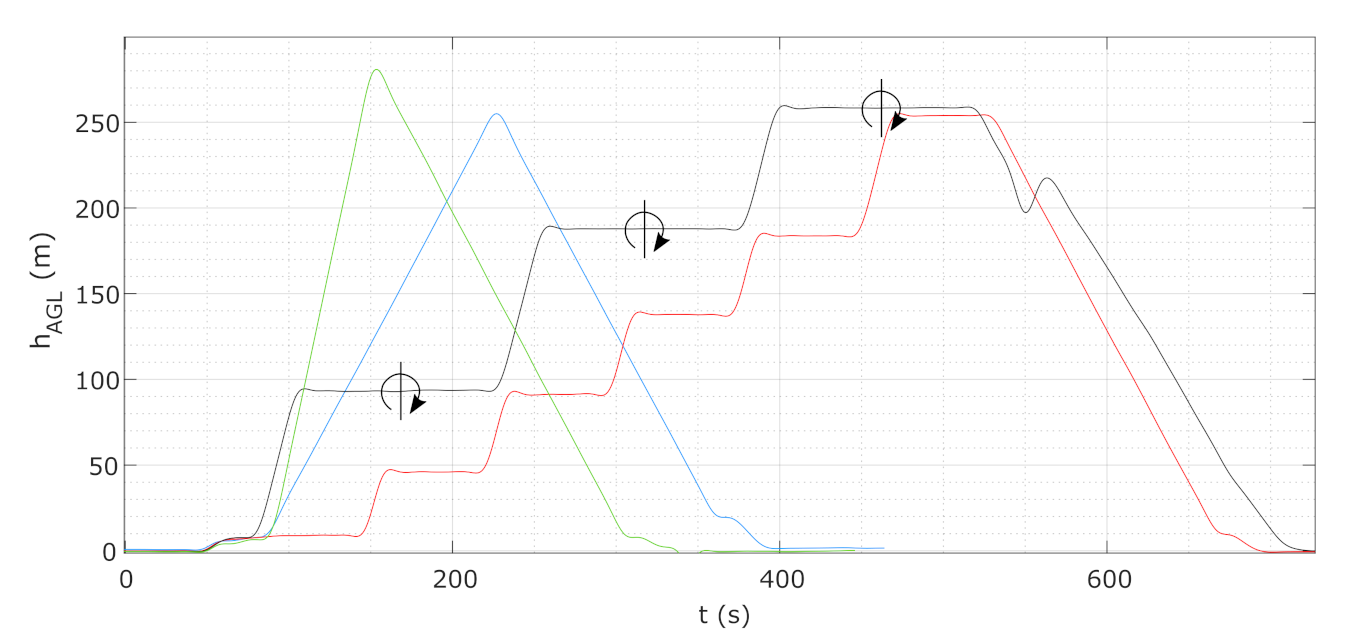
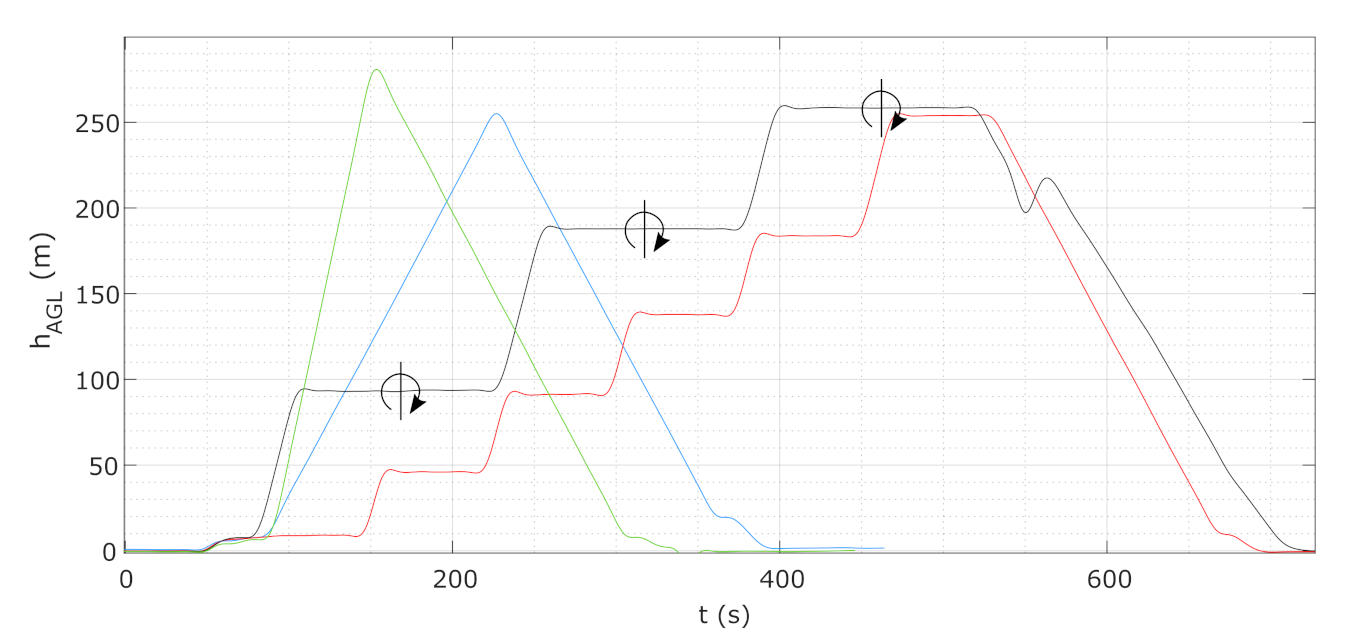
4.1. Basic Air Data
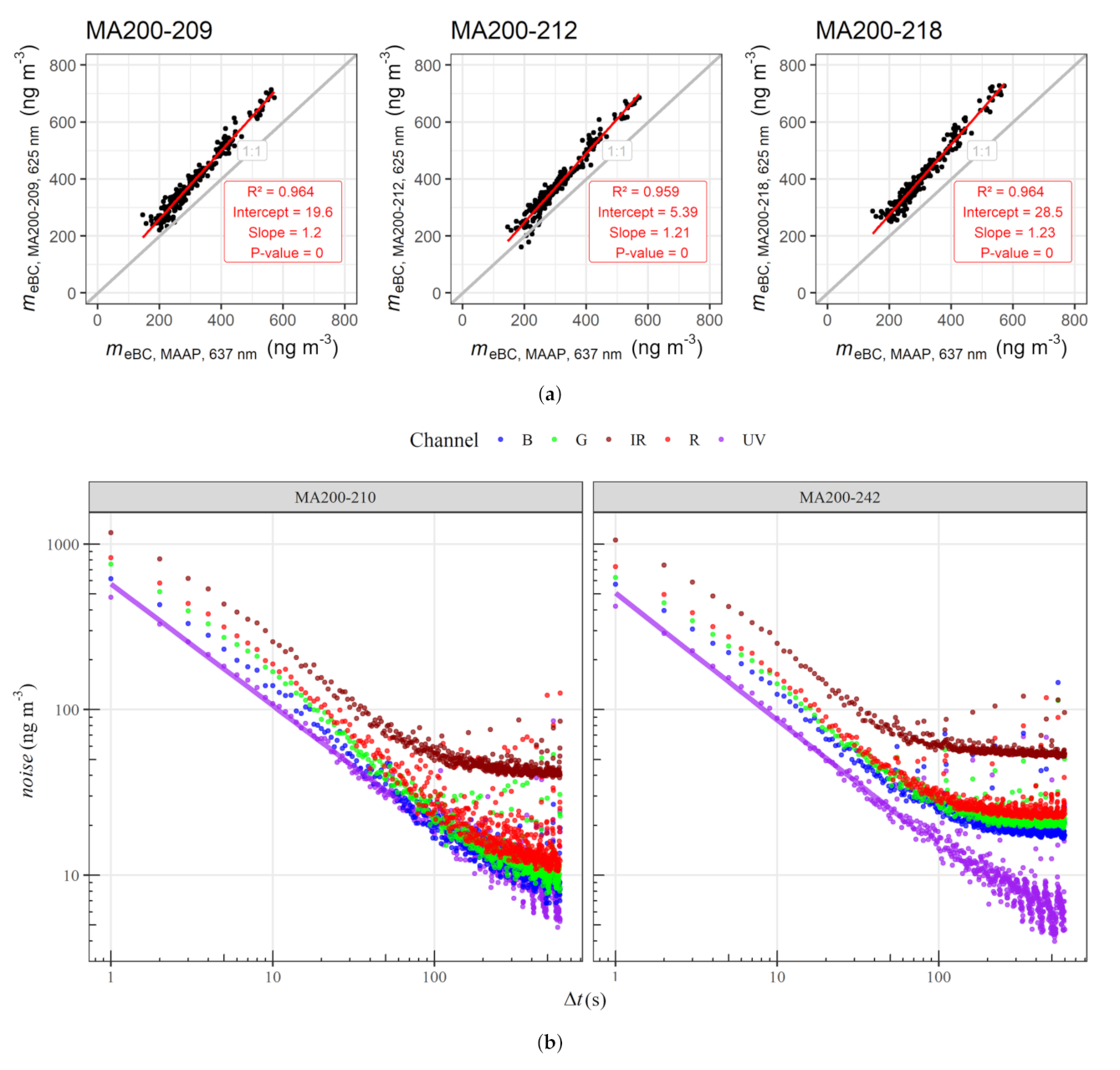
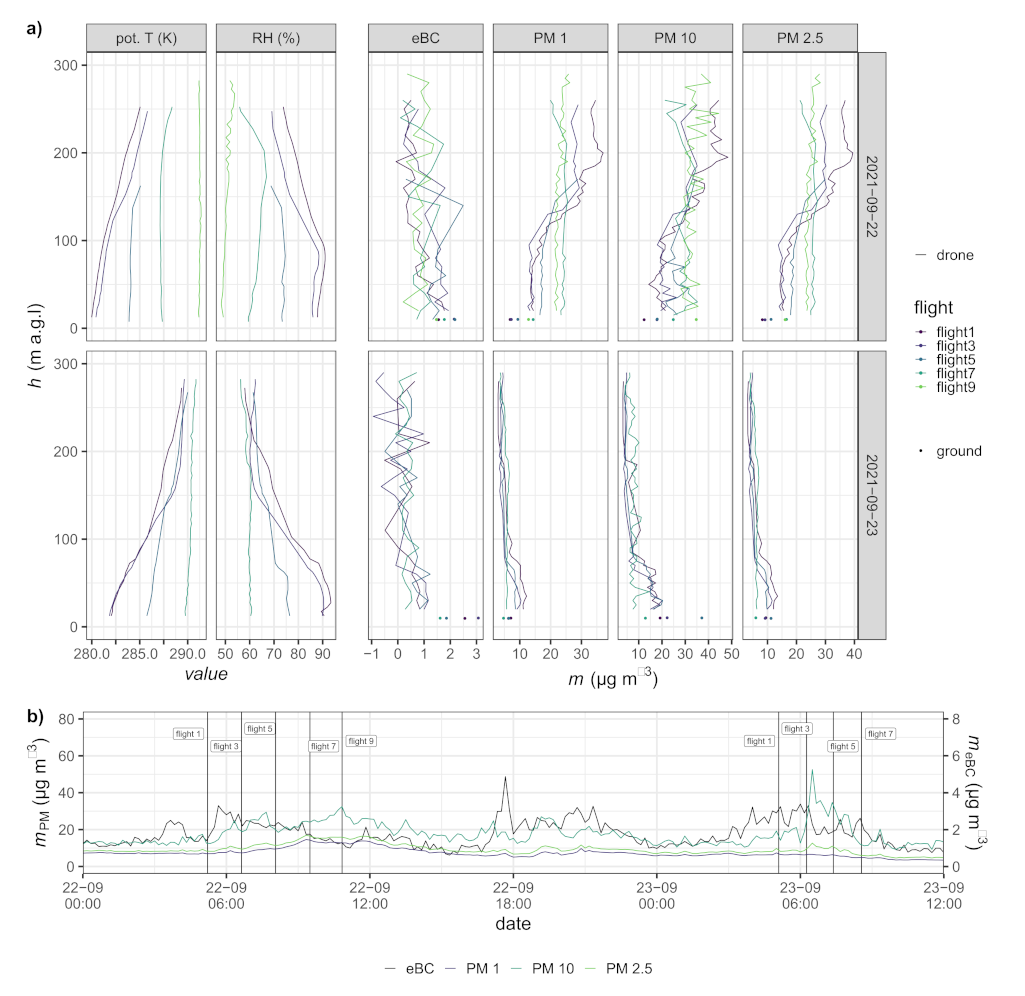
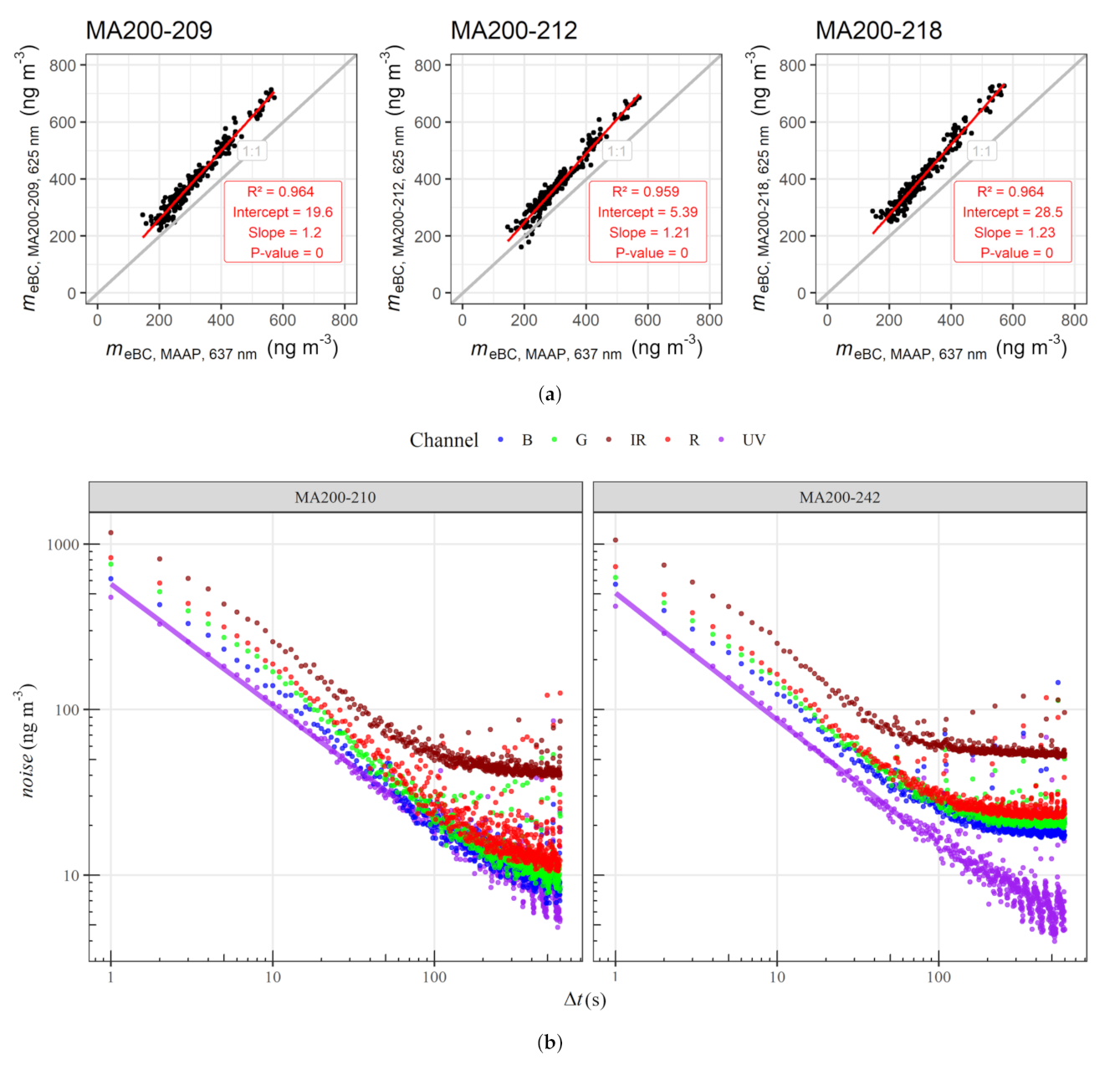
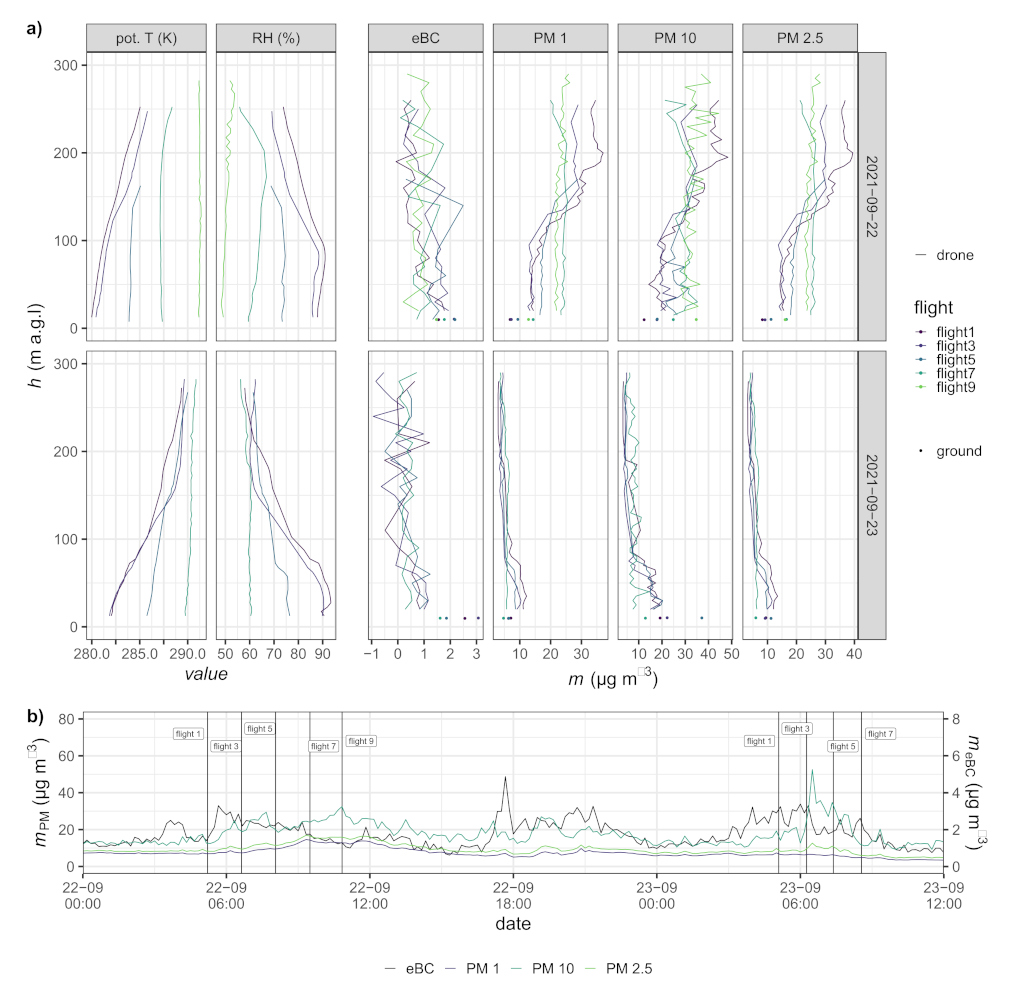
4.2. Aerosol Measurements
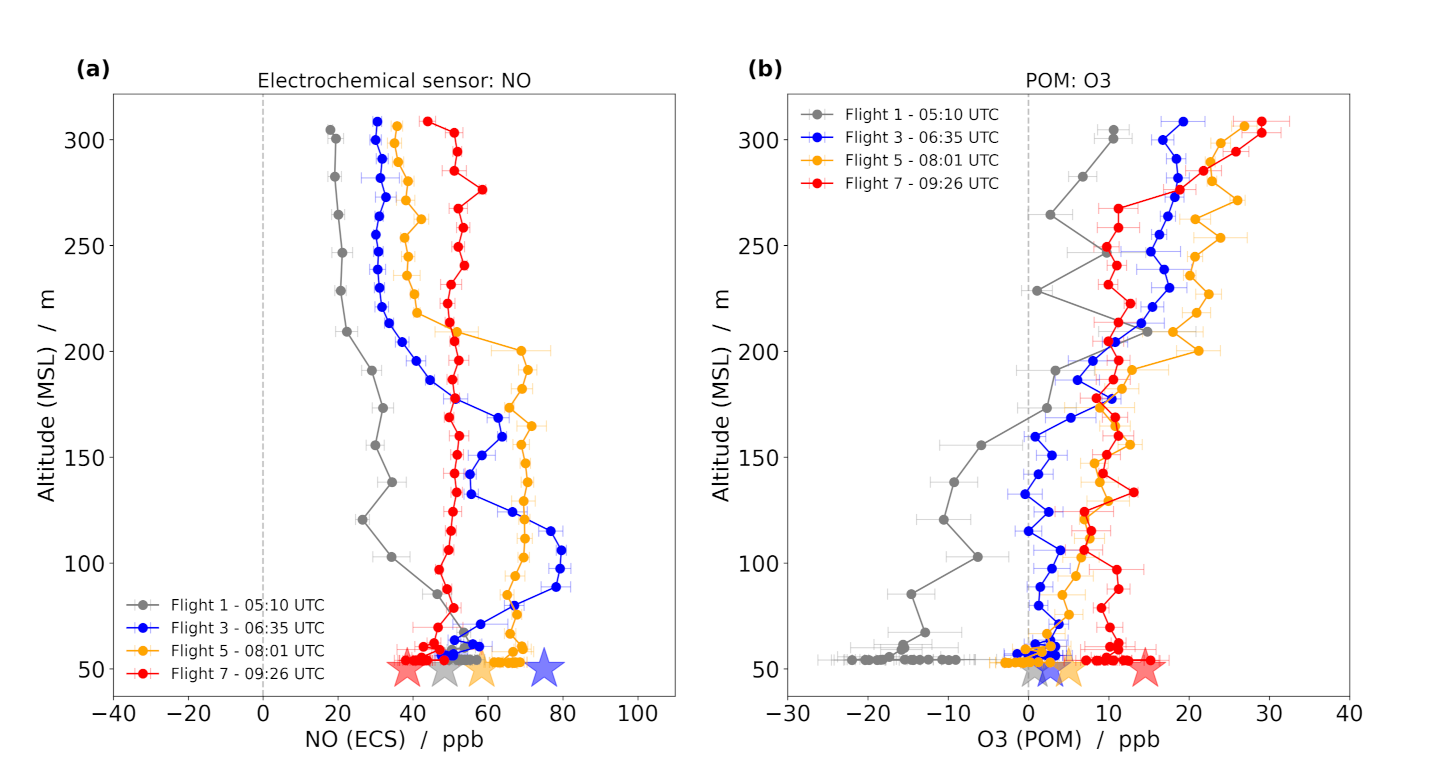
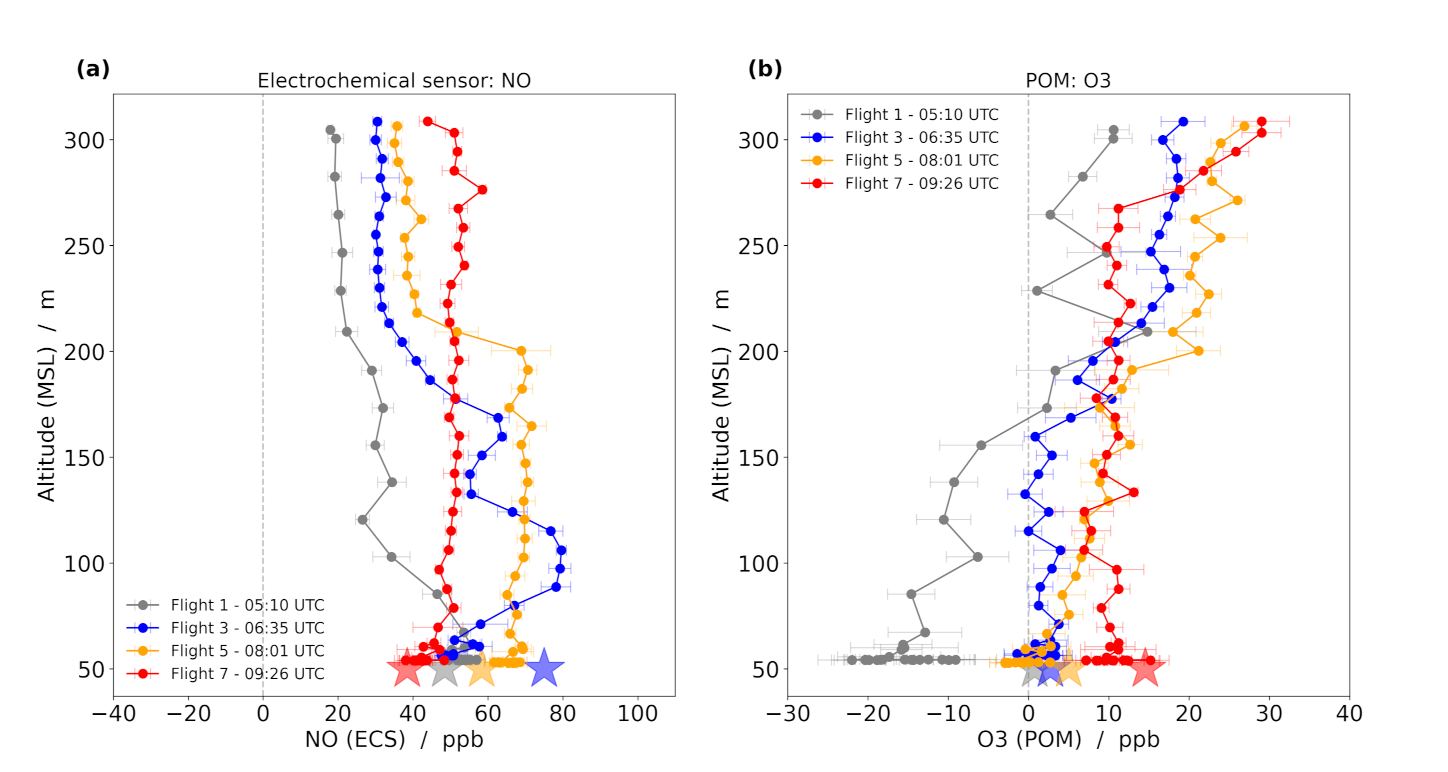
4.3. Reactive Trace Gases
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mayer, S.; Sandvik, A.; Jonassen, M.O.; Reuder, J. Atmospheric profiling with the UAS SUMO: A new perspective for the evaluation of fine-scale atmospheric models. Meteorol. Atmos. Phys. 2012, 116, 15–26. [Google Scholar] [CrossRef]
- Martin, S.; Beyrich, F.; Bange, J. Observing Entrainment Processes Using a Small Remotely Piloted Aircraft System: A Feasibility Study. Bound.-Layer Meteorol. 2014, 150, 449–467. [Google Scholar] [CrossRef]
- Jonassen, M.O.; Tisler, P.; Altstädter, B.; Scholtz, A.; Vihma, T.; Lampert, A.; König-Langlo, G.; Lüpkes, C. Application of remotely piloted aircraft systems in observing the atmospheric boundary layer over Antarctic sea ice in winter. Polar Res. 2015, 34, 25651. [Google Scholar] [CrossRef] [Green Version]
- Lampert, A.; Altstädter, B.; Bärfuss, K.; Bretschneider, L.; Sandgaard, J.; Lobitz, L.; Asmussen, M.; Damm, E.; Käthner, R.; Krüger, T.; et al. Unmanned Aerial Systems for Investigating the Polar Atmospheric Boundary Layer—Technical Challenges and Examples of Applications. Atmosphere 2020, 11, 416. [Google Scholar] [CrossRef] [Green Version]
- van den Kroonenberg, A.; Martin, S.; Beyrich, F.; Bange, J. Spatially-Averaged Temperature Structure Parameter Over a Heterogeneous Surface Measured by an Unmanned Aerial Vehicle. Boundary-Layer Meteorol. 2012, 142, 55–77. [Google Scholar] [CrossRef]
- Lampert, A.; Pätzold, F.; Jiménez, M.A.; Lobitz, L.; Martin, S.; Lohmann, G.; Canut, G.; Legain, D.; Bange, J.; Martínez-Villagrasa, D.; et al. A study of local turbulence and anisotropy during the afternoon and evening transition with an unmanned aerial system and mesoscale simulation. Atmos. Chem. Phys. 2016, 16, 8009–8021. [Google Scholar] [CrossRef] [Green Version]
- Wildmann, N.; Bernard, S.; Bange, J. Measuring the local wind field at an escarpment using small remotely-piloted aircraft. Renew. Energy 2017, 103, 613–619. [Google Scholar] [CrossRef]
- Altstädter, B.; Platis, A.; Wehner, B.; Scholtz, A.; Wildmann, N.; Hermann, M.; Käthner, R.; Baars, H.; Bange, J.; Lampert, A. ALADINA—An unmanned research aircraft for observing vertical and horizontal distributions of ultrafine particles within the atmospheric boundary layer. Atmos. Meas. Tech. 2015, 8, 1627–1639. [Google Scholar] [CrossRef] [Green Version]
- Platis, A.; Altstädter, B.; Wehner, B.; Wildmann, N.; Lampert, A.; Hermann, M.; Birmilli, W.; Bange, J. An observational Case Study of the Influence of Atmospheric Boundary-Layer Dynamics on New Particle Formation. Bound.-Layer Meteorol. 2015, 158, 67–92. [Google Scholar] [CrossRef]
- Villa, T.F.; Gonzalez, F.; Miljievic, B.; Ristovski, Z.D.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [Green Version]
- Gu, Q.; Michanowicz, D.R.; Jia, C. Developing a Mudular Unmanned Aerial Vehicle (UAV) Platform for Air Pollution Profiling. Sensors 2018, 18, 4363. [Google Scholar] [CrossRef] [Green Version]
- Altstädter, B.; Deetz, K.; Vogel, B.; Babic, K.; Dione, C.; Pacifico, F.; Jambert, C.; Ebus, F.; Bärfuss, K.; Pätzold, F.; et al. The Vertical Variability of Black Carbon Observed in the Atmospheric Boundary Layer during DACCIWA. Atmos. Chem. Phys. 2020, 20, 7911–7928. [Google Scholar] [CrossRef]
- Altstädter, B.; Platis, A.; Jähn, M.; Baars, H.; Lückerath, J.; Held, A.; Lampert, A.; Bange, J.; Hermann, M.; Wehner, B. Airborne observations of newly formed boundary layer aerosol particles under cloudy conditions. Atmos. Chem. Phys. 2018, 18, 8249–8264. [Google Scholar] [CrossRef] [Green Version]
- Brosy, C.; Krampf, K.; Zeeman, M.; Wolf, B.; Junkermann, W.; Schäfer, K.; Emeis, S.; Kunstmann, H. Simultaneous multicopter-based air sampling and sensing of meteorological variables. Atmos. Meas. Tech. 2017, 10, 2773–2784. [Google Scholar] [CrossRef] [Green Version]
- Schuyler, T.J.; Guzman, M.I. Unmanned Aerial Systems for Monitoring Trace Tropospheric Gases. Atmosphere 2017, 8, 206. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Liu, B.; Wu, D.; Yang, H.; Mao, X.; Tan, J.; Liang, Y.; Sun, J.Y.; Xia, R.; Sun, J.; et al. Vertical profiling of black carbon and ozone using a multicopter unmanned aerial vehicle (UAV) in urban Shenzhen of South China. Sci. Total. Environ. 2021, 801, 149689. [Google Scholar] [CrossRef]
- Song, R.-F.; Wang, D.-S.; Li, X.-B.; Li, B.; Peng, Z.-R.; He, H.-D. Characterizing vertical distribution patterns of PM2.5 in low troposphere of Shanghai city, China: Implications from the perspective of unmanned aerial vehicle observations. Atmos. Environ. 2021, 265, 118724. [Google Scholar] [CrossRef]
- Chang, C.-C.; Chang, C.-Y.; Wang, J.-L.; Lin, M.-R.; Ou-Yang, C.-F.; Pan, H.-H.; Chen, Y.-C. A study of atmospheric mixing of trace gases by aerial sampling with a multi-rotor drone. Atmos. Environ. 2018, 184, 254–261. [Google Scholar] [CrossRef]
- Crazzolara, C.; Ebner, M.; Platis, A.; Miranda, T.; Bange, J.; Junginger, A. A new multicopter-based unmanned aerial system for pollen and spores collection in the atmospheric boundary layer. Atmos. Meas. Tech. 2019, 12, 1581–1598. [Google Scholar] [CrossRef] [Green Version]
- Lampert, A.; Pätzold, F.; Asmussen, M.; Lobitz, L.; Krüger, T.; Rausch, T.; Sachs, T.; Wille, C.; Zakharov, D.S.; Gaus, D.; et al. Studying boundary layer methane isotopy and vertical mixing processes at a rewetted peatland site using an unmanned aircraft system. Atmos. Meas. Tech. 2020, 13, 1937–1952. [Google Scholar] [CrossRef] [Green Version]
- Martin, S.; Bange, J.; Beyrich, F. Meteorological profiling of the lower troposphere using the research UAV “M2AV Carolo”. Atmos. Meas. Tech. 2011, 4, 705–716. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Chen, H.; Li, Z.; Wang, P.; Cribb, M.; Fan, X. Low-Level Temperature Inversions and Their Effect on Aerosol Condensation Nuclei Concentrations under Different Large-Scale Synoptic Circulations. Adv. Atmos. Sci. 2015, 32, 898–908. [Google Scholar] [CrossRef]
- Rendon, A.M.; Salazar, J.F.; Palacio, C.A. Effects of Urbanization on the Temperature Inversion Breakup in a Mountain Valley with Implications for Air Quality. J. Appl. Meteorol. Climatol. 2014, 53, 840–858. [Google Scholar] [CrossRef]
- Li, B.; Cao, R.; Wang, Z.; Song, R.-F.; Peng, Z.-R.; Xiu, G.; Fu, Q. Use of Multi-Rotor Unmanned Aerial Vehicles for Fine-Grained Roadside Air Pollution Monitoring. Transp. Res. Rec. 2019, 2673, 169–180. [Google Scholar] [CrossRef]
- Kuuluvainen, H.; Poikkimäki, M.; Järvinen, A.; Kuula, J.; Irjala, M.; DalMaso, M.; Keskinen, J.; Timonen, H.; Niemi, J.V.; Rönkko, T. Vertical profiles of lung deposited surface area concentration of particulate matter measured with a drone in a street canyon. Environ. Pollut. 2018, 241, 96–105. [Google Scholar] [CrossRef]
- Lee, S.-H.; Kwak, K.-H. Assessing 3-D Spatial Extent of Near-Road Air Pollution around a Signalized Intersection Using Drone Monitoring and WRF-CFD Modeling. Int. J. Environ. Res. Public Health 2020, 17, 6915. [Google Scholar] [CrossRef]
- Narayama, M.V.; Jalihal, D.; Nagendra, S.M.S. Establishing A Sustainable Low-Cost Air Quality Monitoring Setup: A Survey of the State-of-the-Art. Sensors 2022, 22, 394. [Google Scholar] [CrossRef]
- Elbern, H.; Strunk, A.; Schmidt, H.; Talagrand, O. Emission rate and chemical state estimation by 4-dimensional variational inversion. Atmos. Chem. Phys. 2007, 7, 3749–3769. [Google Scholar] [CrossRef] [Green Version]
- Barré, J.; Petetin, H.; Colette, A.; Guevara, M.; Peuch, V.-H.; Rouil, L.; Engelen, R.; Inness, A.; Flemming, J.; García-Pando, C.P.; et al. Estimating lockdown-induced European NO2 changes using satellite and surface observations and air quality models. Atmos. Chem. Phys. 2021, 21, 7373–7394. [Google Scholar] [CrossRef]
- Franke, P.; Lange, A.C.; Elbern, H. Particle-filter-based volcanic ash emission inversion applied to a hypothetical sub-Plinian Eyjafjallajökull eruption using the Ensemble for Stochastic Integration of Atmospheric Simulations (ESIAS-chem) version 1.0. Geosci. Model Dev. 2022, 15, 1037–1060. [Google Scholar] [CrossRef]
- Duarte, E.D.S.F.; Franke, P.; Lange, A.C.; Friese, E.; Lopes, F.J.d.S.; da Silva, J.J.; dos Reis, J.S.; Landulfo, E.; e Silva, C.M.S.; Elbern, H.; et al. Evaluation of atmospheric aerosols in the metropolitan area of São Paulo simulated by the regional EURAD-IM model on high-resolution. Atmos. Pollution Res. 2021, 12, 451–469. [Google Scholar] [CrossRef]
- Vogel, A.; Elbern, H. Identifying forecast uncertainties for biogenic gases in the Po Valley related to model configuration in EURAD-IM during PEGASOS 2012. Atmos. Chem. Phys. 2021, 21, 4039–4057. [Google Scholar] [CrossRef]
- Bärfuss, K.; Pätzold, F.; Altstädter, B.; Kathe, E.; Nowak, S.; Bretschneider, L.; Bestmann, U.; Lampert, A. New Setup of the UAS ALADINA for Measuring Boundary Layer Properties, Atmospheric Particles and Solar Radiation. Atmosphere 2018, 9, 28. [Google Scholar] [CrossRef] [Green Version]
- Tillmann, R.; Gkatzelis, G.I.; Rohrer, F.; Winter, B.; Wesolek, C.; Schuldt, T.; Lange, A.C.; Franke, P.; Friese, E.; Decker, M.; et al. Air quality observations onboard commercial and targeted Zeppelin flights in Germany—A platform for high-resolution trace-gas and aerosol measurements within the planetary boundary layer. Atmos. Meas. Tech. Discuss. 2021, 2021, 1–23. [Google Scholar] [CrossRef]
- Baum, A.; Günther, L.; Düring, I.; Wehner, B. Untersuchungen zur Luftqualität an Verkehrswegen mit Drohnen. Bautechnik 2018, 95, 712–719. [Google Scholar] [CrossRef]
- Alas, H.D.; Stoecker, A.; Umlauf, N.; Senaweera, O.; Pfeifer, S.; Greven, S.; Wiedensohler, A. Pedestrian exposure to black carbon and PM2.5 emissions in urban hot spots: New findings using mobile measurement techniques and flexible Bayesian regression models. J. Expo. Sci. Environ. Epidemiol. 2021, 1–11. [Google Scholar] [CrossRef]
- Alamouri, A.; Lampert, A.; Gerke, M. An Exploratory Investigation of UAS Regulations in Europe and the Impact on Effective Use and Economic Potential. Drones 2021, 5, 63. [Google Scholar] [CrossRef]
- Mead, M.I.; Popoola, O.A.M.; Stewart, G.B.; Landshoff, P.; Calleja, M.; Hayes, M.; Baldovi, J.J.; McLeod, M.W.; Hodgson, T.F.; Dicks, J.; et al. The use of electrochemical sensors for monitoring urban air quality in low-cost, high-density networks. Atmos. Environ. 2013, 70, 186–203. [Google Scholar] [CrossRef] [Green Version]
- Greene, B.R.; Segales, A.R.; Waugh, S.; Duthoit, S.; Chilson, P.B. Considerations for temperature sensor placement on rotary-wing unmanned aircraft systems. Atmos. Meas. Tech. 2018, 11, 5519–5530. [Google Scholar] [CrossRef] [Green Version]
- Greene, B.R.; Segales, A.R.; Bell, T.M.; Pillar-Little, E.A.; Chilson, P.B. Environmental and Sensor Integration Influences on Temperature Measurements by Rotary-Wing Unmanned Aircraft Systems. Sensors 2019, 19, 1470. [Google Scholar] [CrossRef] [Green Version]
- Barbieri, L.; Kral, S.T.; Bailey, S.C.C.; Frazier, A.E.; Jacob, J.D.; Reuder, J.; Brus, D.; Chilson, P.B.; Crick, C.; Detweiler, C.; et al. Intercomparison of Small Unmanned Aircraft System (sUAS) Measurements for Atmospheric Science during the LAPSE-RATE Campaign. Sensors 2019, 19, 2179. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- DeCarlo, P.F.; Slowik, J.G.; Worsnop, D.R.; Davidovits, P.; Jimenez, J.L. Particle Morphology and Density Characterization by Combined Mobility and Aerodynamic Diameter Measurements. Part 1: Theory. Aerosol Sci. Technol. 2004, 38, 1185–1205. [Google Scholar] [CrossRef] [Green Version]
- Marécal, V.; Peuch, V.-H.; Andersson, C.; Andersson, S.; Arteta, J.; Beekmann, M.; Benedictow, A.; Bergström, R.; Bessagnet, B.; Cansado, A.; et al. A regional air quality forecasting system over Europe: The MACC-II daily ensemble production. Geosci. Model Dev. 2015, 8, 2777–2813. [Google Scholar] [CrossRef] [Green Version]
- Düsing, S.; Wehner, B.; Müller, T.; Stöcker, A.; Wiedensohler, A. The effect of rapid relative humidity changes on fast filter-based aerosol-particle light-absorption measurements: Uncertainties and correction schemes. Atmos. Meas. Tech. 2019, 11, 5879–5895. [Google Scholar] [CrossRef] [Green Version]
- Petzold, A.; Ogren, J.A.; Fiebig, M.; Laj, P.; Li, S.-M.; Baltensperger, U.; Holzer-Popp, T.; Kinne, S.; Pappalardo, G.; Sugimoto, N.; et al. Recommendations for reporting “black carbon” measurements. Atmos. Chem. Phys. 2013, 13, 8365–8379. [Google Scholar] [CrossRef] [Green Version]
- Madueño, L.; Kecorius, S.; Löndahl, J.; Müller, T.; Pfeifer, S.; Haudek, A.; Mardoñez, V.; Wiedensohler, A. A new method to measure real-world respiratory tract deposition of inhaled ambient black carbon. Environ. Pollut. 2019, 248, 295–303. [Google Scholar] [CrossRef]
- Chen, Y.; Bond, T.C. Light absorption by organic carbon from wood combustion. Atmos. Chem. Phys. 2010, 4, 1773–1787. [Google Scholar] [CrossRef] [Green Version]
- Product Information of Fidas®200. Available online: https://www.palas.de/en/product/fidas200s (accessed on 8 February 2022).
- Corsmeier, U.; Kohler, M.; Vogel, B.; Vogel, H.; Fiedler, M. BAB II: A project to evaluate the accuracy of real-world traffic emissions for a motorway. Atmos. Environ. 2005, 39, 5627–5641. [Google Scholar] [CrossRef]
- Düsing, S.; Ansmann, A.; Baars, H.; Corbin, J.C.; Denjean, C.; Gysel-Beer, M.; Müller, T.; Poulain, L.; Siebert, H.; Spindler, G.; et al. Measurement report: Comparison of airborne, in situ measured, lidar-based, and modeled aerosol optical properties in the central European background—identifying sources of deviations. Atmos. Chem. Phys. 2021, 21, 16745–16773. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Measurement | Interface | FQY | Place |
|---|---|---|---|---|
| Vaisala HMP110 OP | Temperature Humidity | RS485 to mB | 2 Hz | Inlet |
| Vaisala HMP110 | Temperature Humidity | RS485 to mB | 2 Hz | MC |
| IST AG HYT939 | Temperature Humidity | I2C to mB | XYZ Hz | MC |
| IFF Finewire | Temperature | analog to mB | 100 Hz | Inlet |
| IFF Finewire | Temperature | analog to mB | 100 Hz | MC |
| TE Connectivity TSYS01 | Temperature | I2C to mB | 100 Hz | Inlet |
| TE Connectivity TSYS01 | Temperature | I2C to mB | 100 Hz | MC |
| IST AG P14 Rapid | Humidity | I2C to mB | 100 Hz | Inlet |
| IST AG P14 Rapid | Humidity | I2C to mB | 100 Hz | MC |
| IST AG TSic 306 | Temperature | direct to mB | 1 Hz | MC |
| IST AG TSic 306 OP | Temperature | direct to mB | 1 Hz | Cube |
| IST AG TSic 306 OP | Temperature | direct to mB | 1 Hz | Cube |
| IST AG TSic 306 OP | Temperature | direct to mB | 1 Hz | Cube |
| IST AG TSic 306 OP | Temperature | direct to mB | 1 Hz | Cube |
| uBlox ZED-F9P OP | Position | UART to RASP RS232 to mB | 10 Hz | Cube |
| ADIS16488BMLZ OP | Attitude | direct to mB | 100 Hz | Cube |
| Melexis MLX90614 OP | IR Radiation | RS232 to mB | XYZ Hz | FrontPod |
| EKO ML-02 OP | Radiation | analog to mB | 100 Hz | Inlet |
| EKO ML-02 OP | Radiation | analog to mB | 100 Hz | FrontPod |
| Sony IMX477R OP | Images | direct to RASP | 1 Hz | FrontPod |
| AMS 5812-0150-B OP | Absolute Pressure | I2C to mB | 100 Hz | Cube |
| AMS 5812-015W-D-B-N | Differential Pressure | I2C to mB | 100 Hz | Inlet |
| AMS 5812-015W-D-B-N OP | Differential Pressure | I2C to mB | 100 Hz | Inlet |
| AMS 5812-015W-D-B-N OP | Differential Pressure | I2C to mB | 100 Hz | MC |
| bin | Upper Border (m) | Lower Border (m) | Geometric Mean Diameter (m) | |||
|---|---|---|---|---|---|---|
| 1.59 + i0 | 1.54 + i0 | 1.59 + i0 | 1.54 + i0 | 1.59 + i0 | 1.54 + i0 | |
| #1 | 0.3 | 0.312 | 0.5 | 0.526 | 0.387 | 0.405 |
| #2 | 0.5 | 0.526 | 0.7 | 0.736 | 0.592 | 0.622 |
| #3 | 0.7 | 0.736 | 1.0 | 1.023 | 0.837 | 0.868 |
| #4 | 1.0 | 1.023 | 2.5 | 2.595 | 1.581 | 1.629 |
| #5 | 2.5 | 2.595 | 5.0 | 5.041 | 3.536 | 3.617 |
| #6 | 5.0 | 5.041 | 10 a | 10.242 | 7.071 | 7.186 |
| Sensor | Measurement | FQY | Place |
|---|---|---|---|
| IST AG HYT939 OP | Temperature Humidity | 1 Hz | Inlet |
| IST AG HYT939 OP | Temperature Humidity | 1 Hz | Stack (after optic) |
| IST AG HYT939 OP | Temperature Humidity | 1 Hz | Stack (after dryer) |
| MetOne GT526-S OP | 1 Hz | Stack | |
| AethLabs MA200 OP | 1 Hz | Stack | |
| Sensirion SFM4100 OP | Mass flow | 56 Hz | Stack |
| AMS 5915-1200-B OP | Absolute Pressure (700–1200 hPa) | 30 Hz | Inlet |
| Bosch BME280 OP | Absolute Pressure Temperature Humidity | 1 Hz | Stack |
| Instrument | Parameter | FQY | Place |
|---|---|---|---|
| ECS setups (ISBs, PCB, support plate) | ↓ | - | Top OP, Front Left OP, Measurement Chamber OP Front Right, Rear Left, Rear Right |
| Alphasense CO-B4 | CO | 1 Hz | ECS setups |
| Alphasense NO-B4 | NO | 1 Hz | ECS setups |
| Alphasense NO2-B43F | NO | 1 Hz | ECS setups |
| Alphasense Ox-B431 | O + NO | 1 Hz | ECS setups |
| Telaire ChipCap 2 | Temperature Humidity | 1 Hz | ECS setups |
| Bosch BME280 OP | Absolute Pressure Temperature Humidity | 1 Hz | ECS setups |
| Date | Profiles | Flight of Day |
|---|---|---|
| Wesseling I | ||
| 31 May 2021 | Continuous | 1, 3, 5 |
| 31 May 2021 | Step | 2, 4 |
| 1 June 2021 | Continuous | 1, 3, 5, 7, 8, 9 |
| 1 June 2021 | Step | 2, 4, 6 |
| 1 June 2021 | Horizontal | 10 |
| Wesseling II | ||
| 22 Septmeber 2021 | Continuous | 1, 3, 5, 7, 9 |
| 22 Septmeber 2021 | Step | 2, 4, 6, 8, 10 |
| 22 Septmeber 2021 | Horizontal | 11, 12 |
| 23 Septmeber 2021 | Continuous | 1, 3, 5, 7 |
| 23 Septmeber 2021 | Step | 2, 4, 6, 8 |
| Wesseling II | |||
|---|---|---|---|
| Day I—22 September 2021 | Day II—23 September 2021 | ||
| FlightId | Mean Time (UTC) | FlightId | Mean Time (UTC) |
| 1 | 05:12:53 | 1 | 05:05:33 |
| 3 | 06:37:56 | 3 | 06:31:15 |
| 5 | 08:03:20 | 5 | 07:22:39 |
| 7 | 09:29:38 | 7 | 08:31:57 |
| 9 | 10:50:18 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bretschneider, L.; Schlerf, A.; Baum, A.; Bohlius, H.; Buchholz, M.; Düsing, S.; Ebert, V.; Erraji, H.; Frost, P.; Käthner, R.; et al. MesSBAR—Multicopter and Instrumentation for Air Quality Research. Atmosphere 2022, 13, 629. https://doi.org/10.3390/atmos13040629
Bretschneider L, Schlerf A, Baum A, Bohlius H, Buchholz M, Düsing S, Ebert V, Erraji H, Frost P, Käthner R, et al. MesSBAR—Multicopter and Instrumentation for Air Quality Research. Atmosphere. 2022; 13(4):629. https://doi.org/10.3390/atmos13040629
Chicago/Turabian StyleBretschneider, Lutz, Andreas Schlerf, Anja Baum, Henning Bohlius, Marcel Buchholz, Sebastian Düsing, Volker Ebert, Hassnae Erraji, Paul Frost, Ralf Käthner, and et al. 2022. "MesSBAR—Multicopter and Instrumentation for Air Quality Research" Atmosphere 13, no. 4: 629. https://doi.org/10.3390/atmos13040629
APA StyleBretschneider, L., Schlerf, A., Baum, A., Bohlius, H., Buchholz, M., Düsing, S., Ebert, V., Erraji, H., Frost, P., Käthner, R., Krüger, T., Lange, A. C., Langner, M., Nowak, A., Pätzold, F., Rüdiger, J., Saturno, J., Scholz, H., Schuldt, T., ... Lampert, A. (2022). MesSBAR—Multicopter and Instrumentation for Air Quality Research. Atmosphere, 13(4), 629. https://doi.org/10.3390/atmos13040629