
Multi-Channel Blind Restoration of Mixed Noise Images under Atmospheric Turbulence


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. MC Image Restoration Theory
2.1. Principle of MC Blind Deconvolution Algorithm
2.2. Solving Ill-Posed Problems
3. Experiment and Analysis
3.1. Experimental Environment
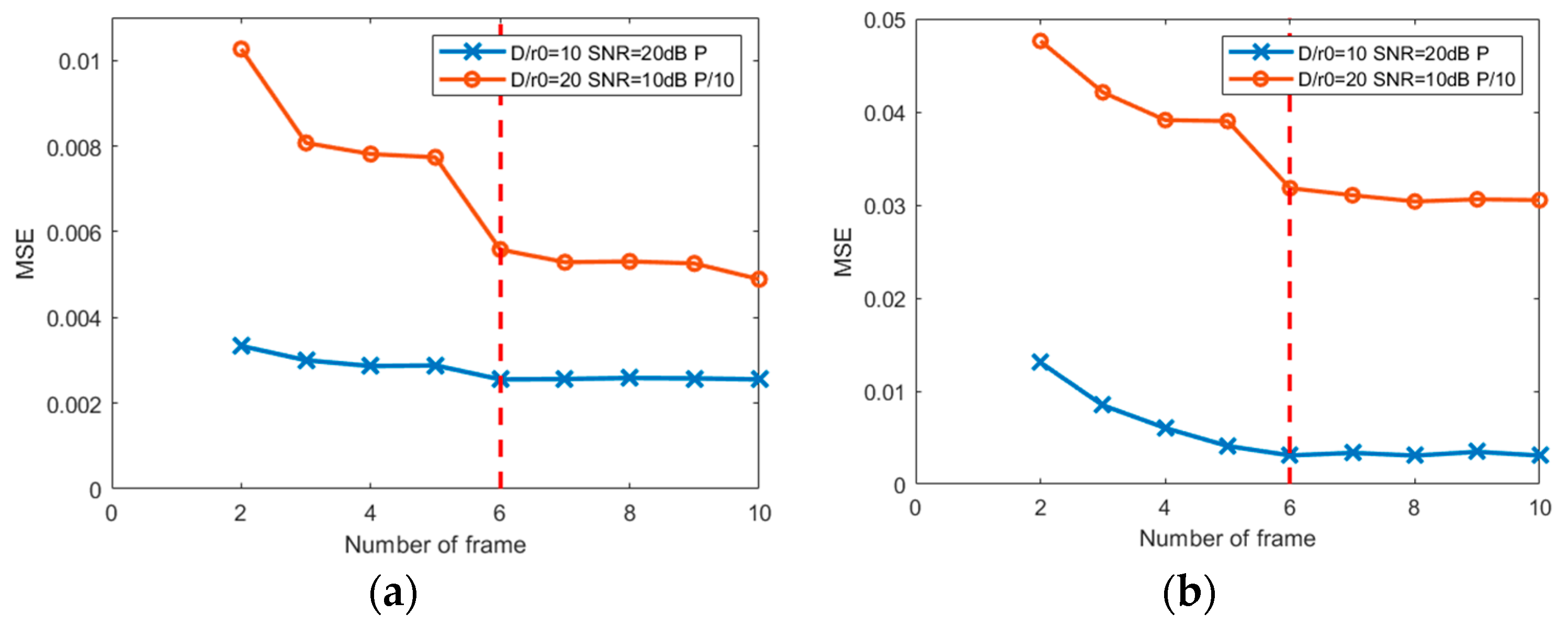
3.2. Channel Number
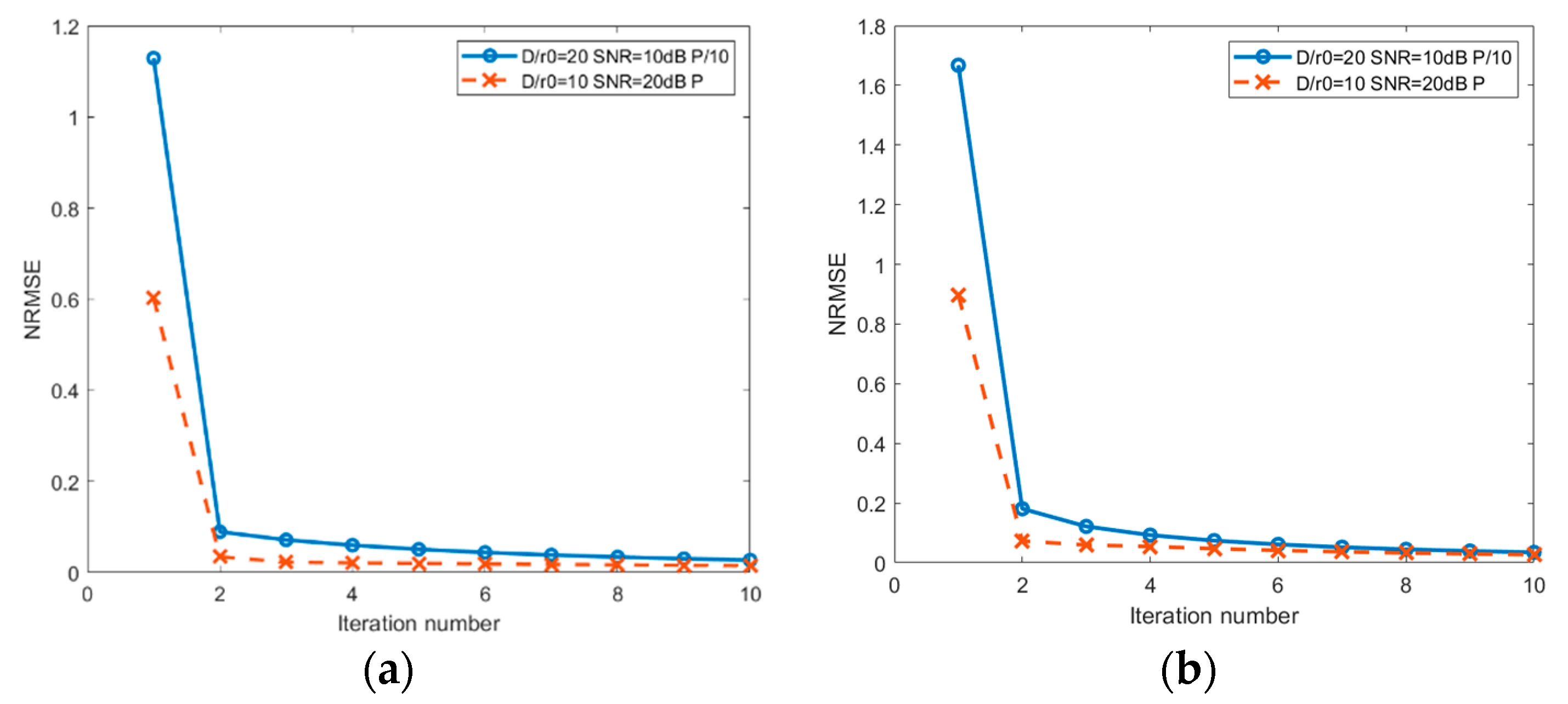
3.3. Convergence Speed of MCAM Method
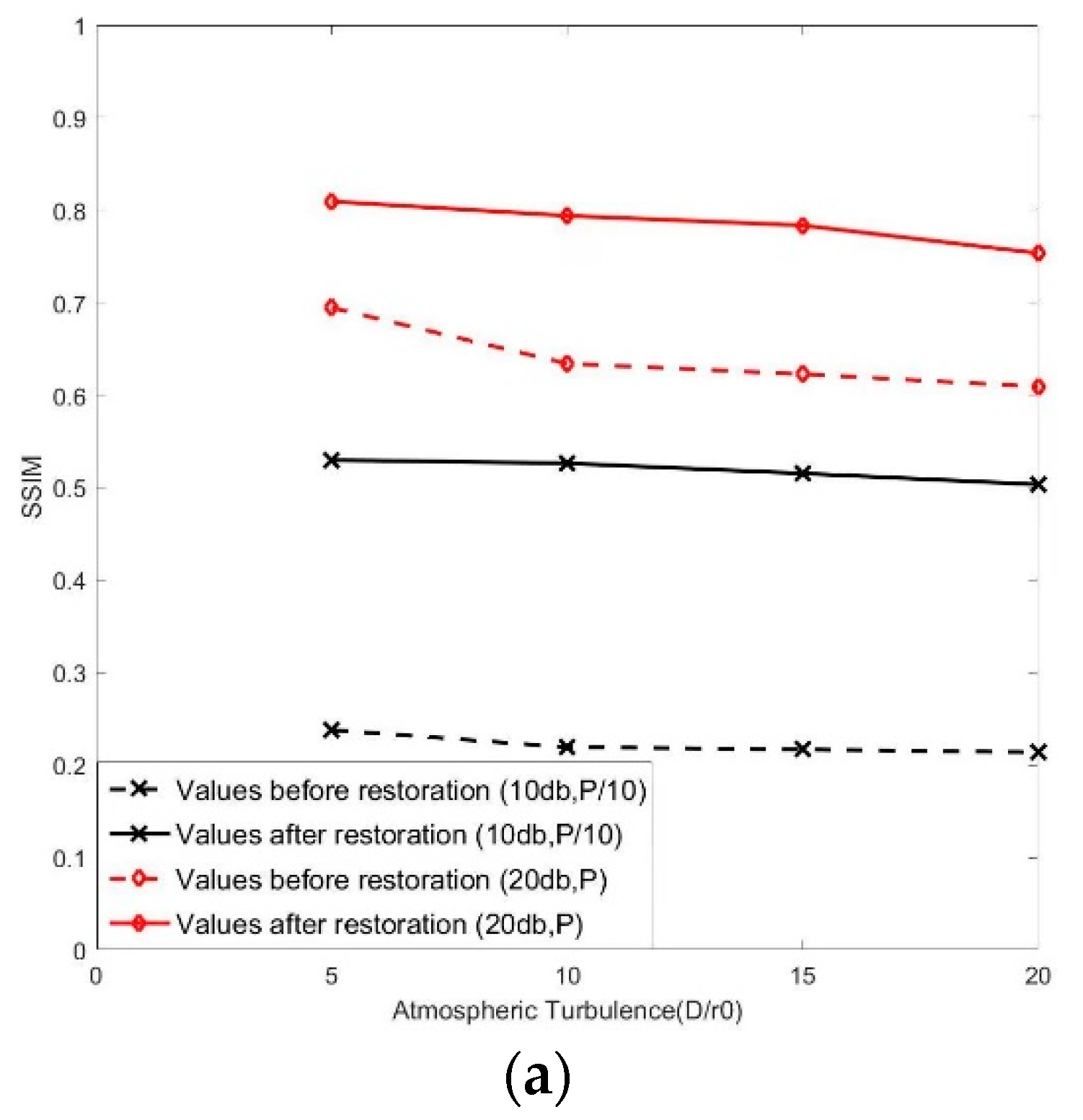
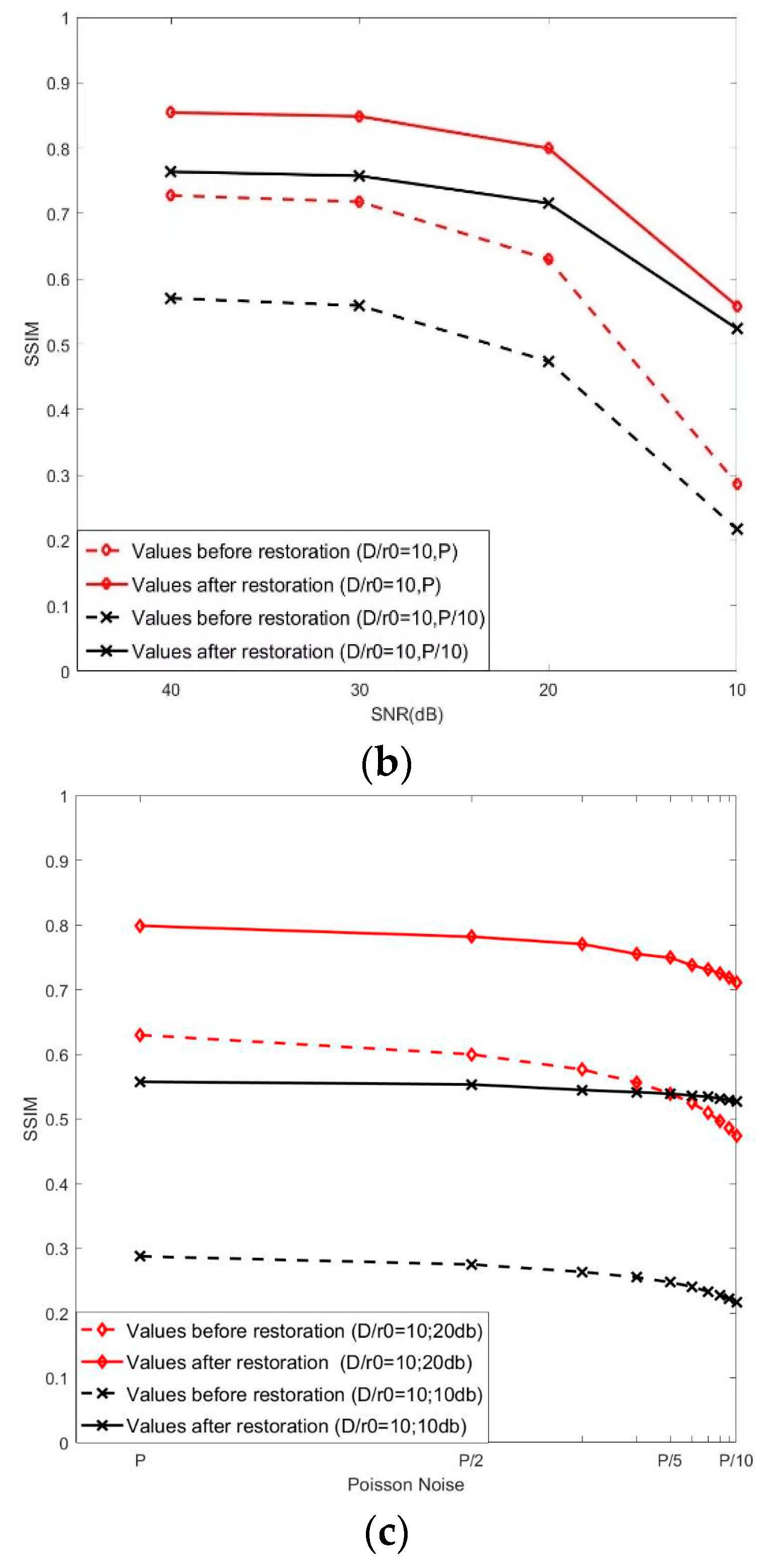
3.4. Quality Evaluation of Restored Image
3.5. Effect of Image Restoration
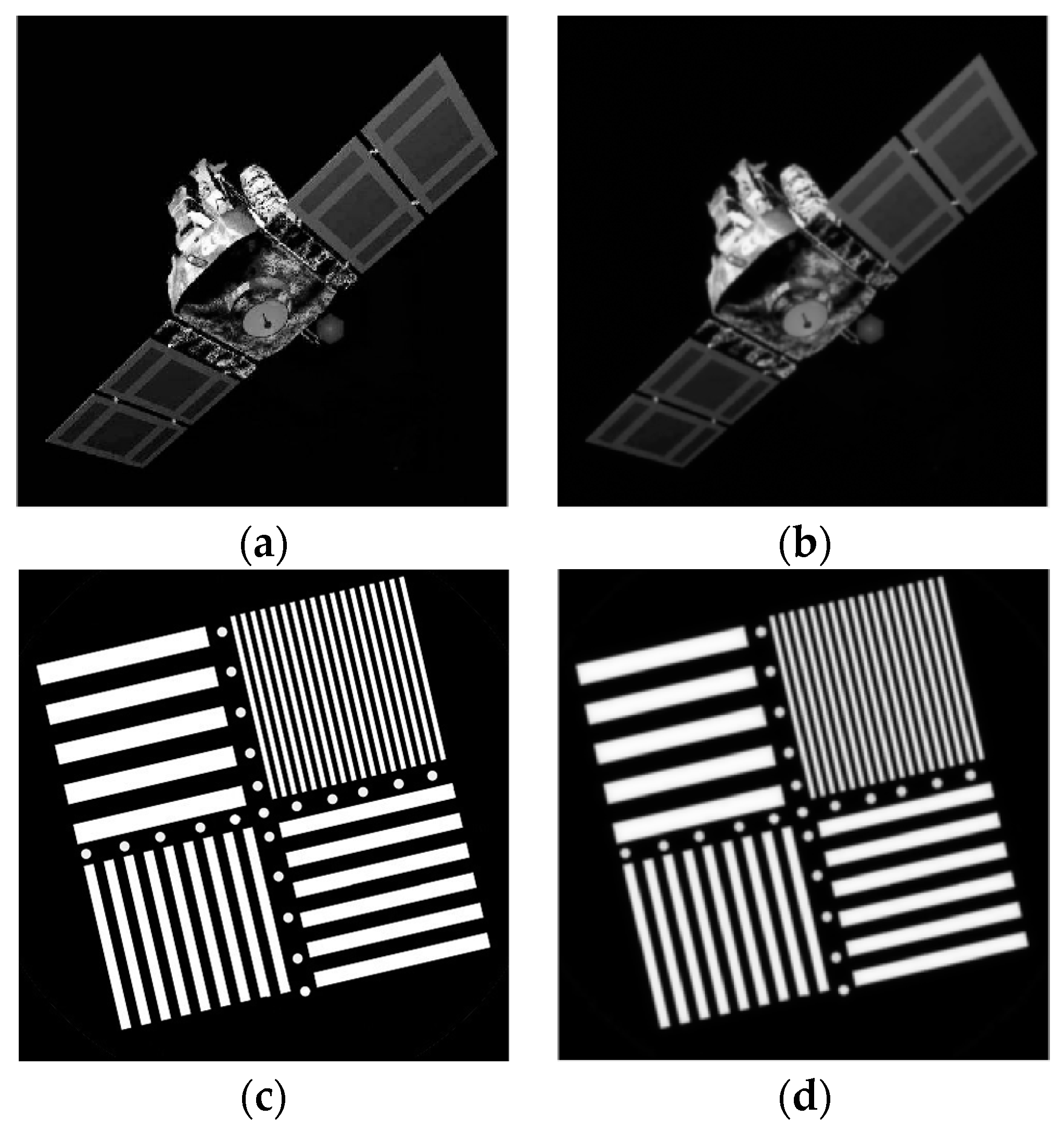
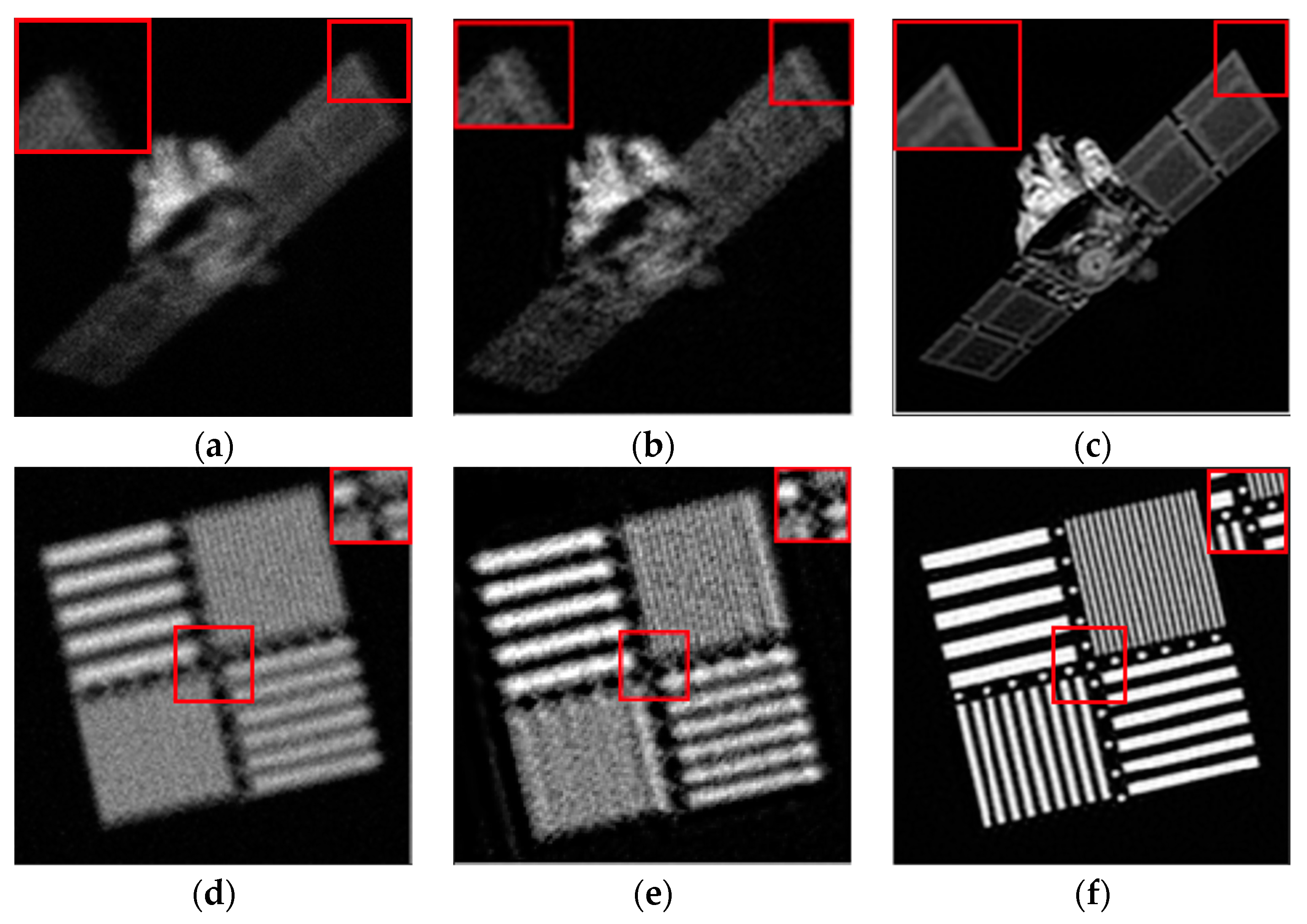
3.5.1. Restoration Results under the Condition of Moderate Turbulence and Mixed Noise
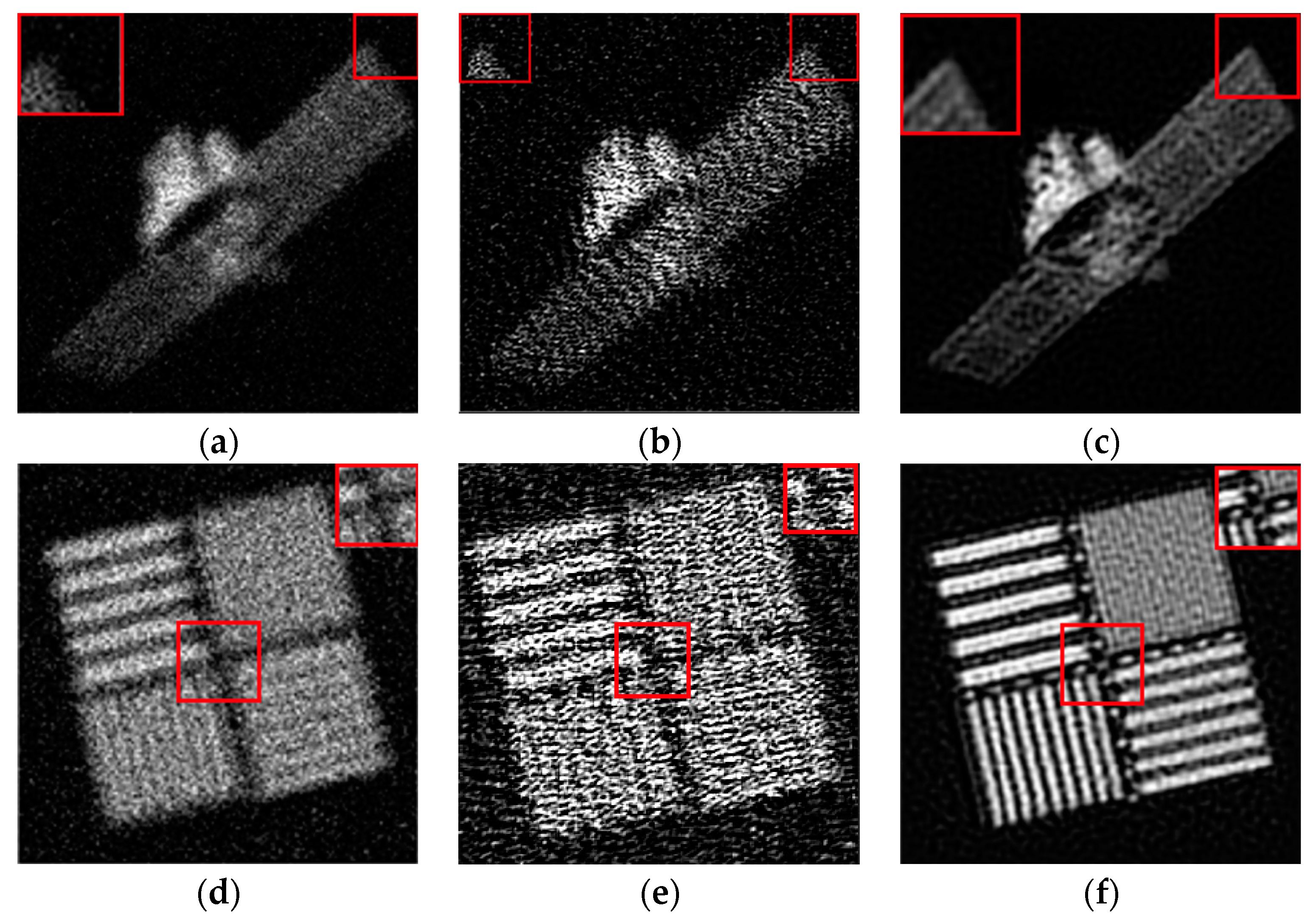
3.5.2. Restoration Results under the Influence of Strong Turbulence and Mixed Noise
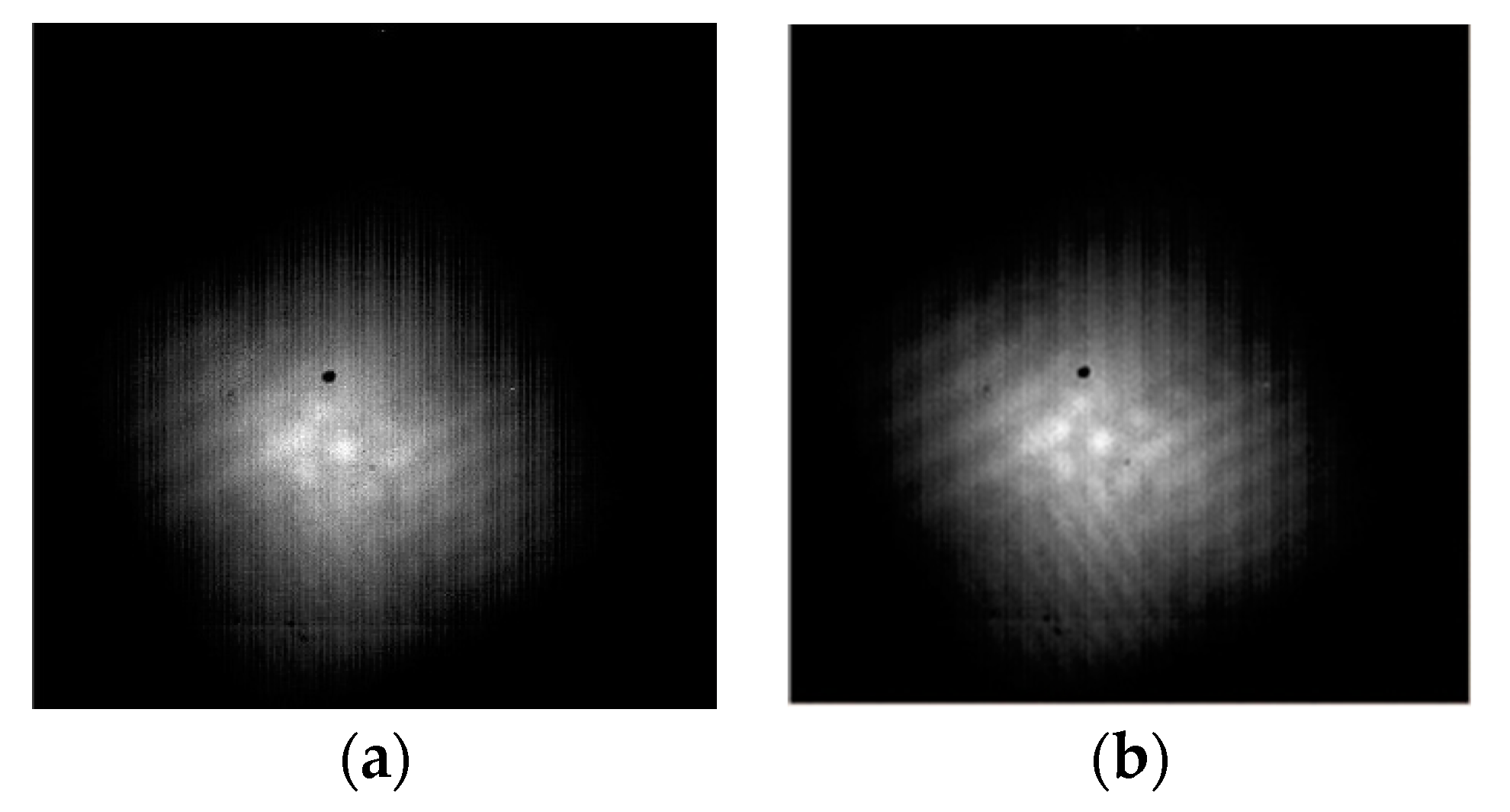
3.5.3. Restoration Results by Actual Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yong, J.; Tian, Y.; Xu, K.; Rao, C. An adaptive optics system control method combined with image restoration technology. Acta Phys. Sin. 2020, 69, 253–262. [Google Scholar] [CrossRef]
- Wang, K. Research on Adaptive Optics Correction Technology for Atmospheric Turbulent Wavefront Distortion; University of Chinese Academy of Sciences: Beijing, China, 2021; p. 000044. [Google Scholar]
- Ren, D.Q.; Zhang, T.Y.; Wang, G. A low-cost and high-performance technique for adaptive optics static wavefront correction. Res. Astron. Astrophys. 2021, 21, 263–270. [Google Scholar] [CrossRef]
- Banham, M.R.; Katsaggelos, A.K. Digital image restoration. IEEE Signal Process. Mag. 1997, 14, 24–41. [Google Scholar] [CrossRef]
- Fang, L.J.; Zuo, H.Y.; Pang, L.; Yang, Z.; Zhang, X.; Zhu, J. Image reconstruction through thin scattering media by simulated annealing algorithm. Opt. Lasers Eng. 2018, 106, 105–110. [Google Scholar] [CrossRef]
- Yang, H.Y.; Su, X.Q.; Chen, S.M. Blind Image Deconvolution Algorithm Based on Sparse Optimization with an Adaptive Blur Kernel Estimation. Appl. Sci. 2020, 10, 2437. [Google Scholar] [CrossRef]
- Xie, X.; Liu, Y.; Liang, H.; Zhou, J. Speckle correlation imaging: From point spread function to all elements of light field. J. Opt. 2020, 40, 71–82. [Google Scholar]
- Wang, J.L.; Li, B.H.; Zhang, X.L. A novel hybrid algorithm for lucky imaging. Res. Astron. Astrophys. 2021, 21, 156–168. [Google Scholar] [CrossRef]
- Xiang, M.; Pan, A.; Liu, J.P.; Xi, T.; Guo, X.; Liu, F.; Shao, X. Phase Diversity-Based Fourier Ptychography for Varying Aberration Correction. Front. Phys. 2022, 10, 848943. [Google Scholar] [CrossRef]
- Andrews, H.C.; Hunt, B.R. Digital Image Restoration. Pattern Recognit. 1979, 11, 75. [Google Scholar]
- Ayers, G.R.; Dainty, J.C. Iterative blind deconvolution method and its applications. Opt. Lett. 1988, 13, 547–549. [Google Scholar] [CrossRef]
- Molina, R.; Mateos, J.; Katsaggelos, A.K. Blind deconvolution using a variational approach to parameter, image, and blur estimation. IEEE Trans. Image Process. 2006, 15, 3715–3727. [Google Scholar] [CrossRef] [PubMed]
- Schulz, T.J. Multiframe blind deconvolution of astronomical images. J. Opt. Soc. Am. A 1993, 10, 1064–1073. [Google Scholar] [CrossRef]
- Kenig, T.; Kam, Z.; Feuer, A. Blind image deconvolution using machine learning for three-dimensional microscopy. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2191–2204. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Wu, Y.; Fang, Z.; Xu, Q.; Yang, H.; Yang, H. Post-processing of adaptive optics images based on multi-channel blind recognition. Acta Photon. Sin. 2020, 49, 0201003. [Google Scholar]
- Sroubek, F.; Milanfar, P. Robust multichannel blind deconvolution via fast alternating minimization. IEEE Trans. Image Process. 2011, 21, 1687–1700. [Google Scholar] [CrossRef]
- Yang, H.; Li, S.; Li, X.; Zhang, Z.; Yang, H.; Liu, J. Blind restoration of turbulence degraded images based on two-channel alternating minimization algorithm. Optoelectron. Lett. 2022, 18, 122–128. [Google Scholar] [CrossRef]
- Chen, L. Several Types of Methods for Solving Constrained Optimization Problems Based on Augmented Lagrangian Functions; Hunan University: Changsha, China, 2016; pp. 5–24. [Google Scholar]
- Wang, X. Laplacian operator-based edge detectors. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 886–890. [Google Scholar] [CrossRef]
- Roddier, N.A. Atmospheric wavefront simulation using Zernike polynomials. Opt. Eng. 1990, 29, 1174–1180. [Google Scholar] [CrossRef]
- Yang, H.; Li, X. The influence of imaging system noise on the correction effect of adaptive optics without wavefront detection. China Laser 2010, 37, 2520–2525. [Google Scholar] [CrossRef]
- Zhang, Z. Research on Poisson ImageDenoising and Deblurring Based on Variation Model; Nanjing University of Science and Technology: Nanjing, China, 2015; pp. 51–68. [Google Scholar]
- Chowdhury, M.R.; Qin, J.; Lou, Y. Non-blind and blind deconvolution under poisson noise using fractional-order total variation. J. Math. Imaging Vis. 2020, 62, 1238–1255. [Google Scholar] [CrossRef]
- Ren, D.W.; Zhang, H.Z.; Zhang, D.; Zuo, W. Fast total-variation based image restoration based on derivative alternated direction optimization methods. Neurocomputing 2015, 170, 201–212. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Li, S.; Liu, J.; Han, X.; Zhang, Z. Multi-Channel Blind Restoration of Mixed Noise Images under Atmospheric Turbulence. Atmosphere 2022, 13, 1842. https://doi.org/10.3390/atmos13111842
Yang H, Li S, Liu J, Han X, Zhang Z. Multi-Channel Blind Restoration of Mixed Noise Images under Atmospheric Turbulence. Atmosphere. 2022; 13(11):1842. https://doi.org/10.3390/atmos13111842
Chicago/Turabian StyleYang, Huizhen, Songheng Li, Jinlong Liu, Xue Han, and Zhiguang Zhang. 2022. "Multi-Channel Blind Restoration of Mixed Noise Images under Atmospheric Turbulence" Atmosphere 13, no. 11: 1842. https://doi.org/10.3390/atmos13111842
APA StyleYang, H., Li, S., Liu, J., Han, X., & Zhang, Z. (2022). Multi-Channel Blind Restoration of Mixed Noise Images under Atmospheric Turbulence. Atmosphere, 13(11), 1842. https://doi.org/10.3390/atmos13111842