The Potential of Low-Cost Tin-Oxide Sensors Combined with Machine Learning for Estimating Atmospheric CH4 Variations around Background Concentration

 ,
,  , , , , and
, , , , and
Abstract
1. Introduction
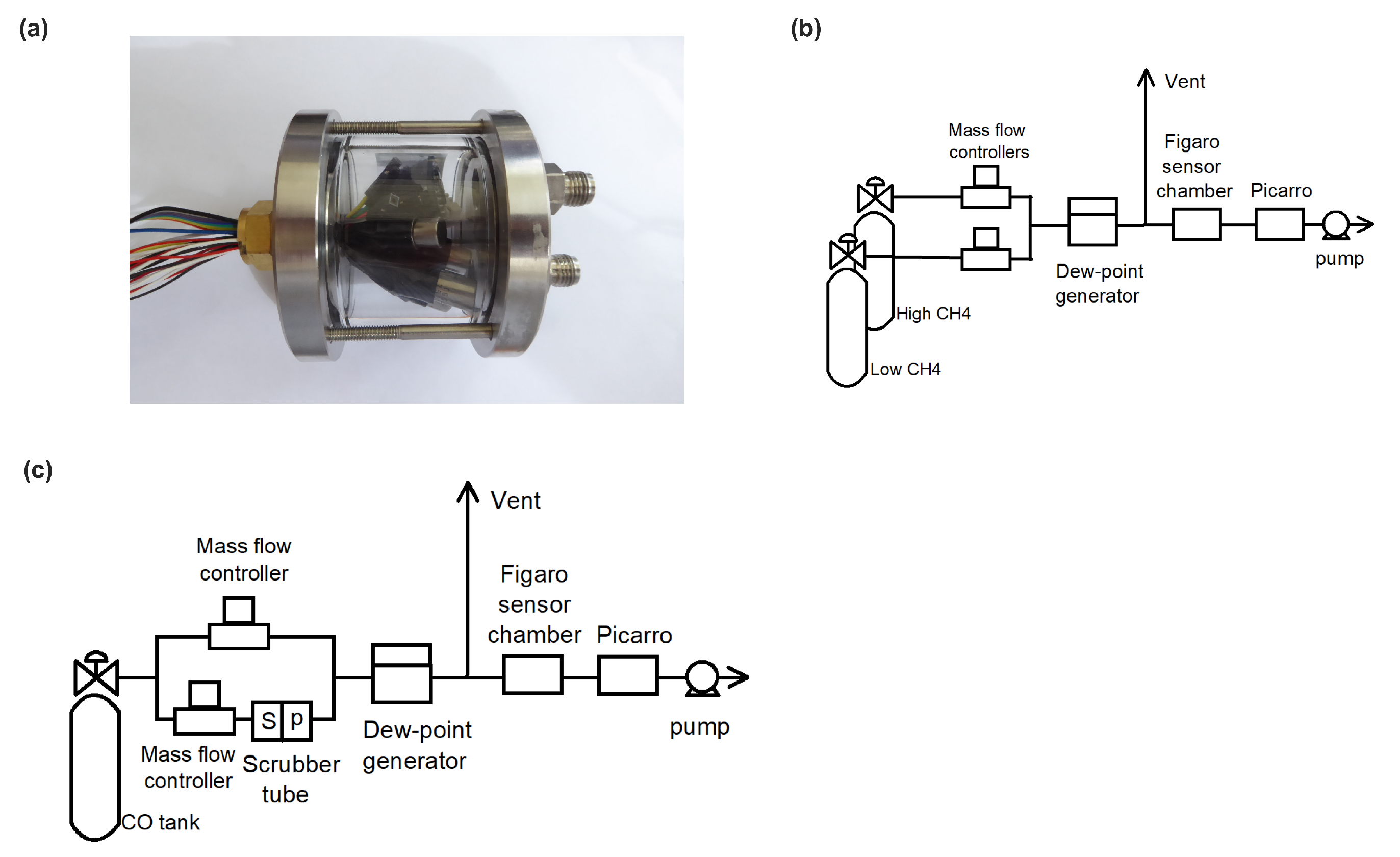
2. Experimental Set-Up
2.1. Measurement of Low-Cost Sensors Sensitivities to CH4, CO and H2O
2.2. Measurements of Room Air with Low Cost Sensors and CRDS
3. Modeling CH4 from Figaro Resistances and Other Predictors
4. Results
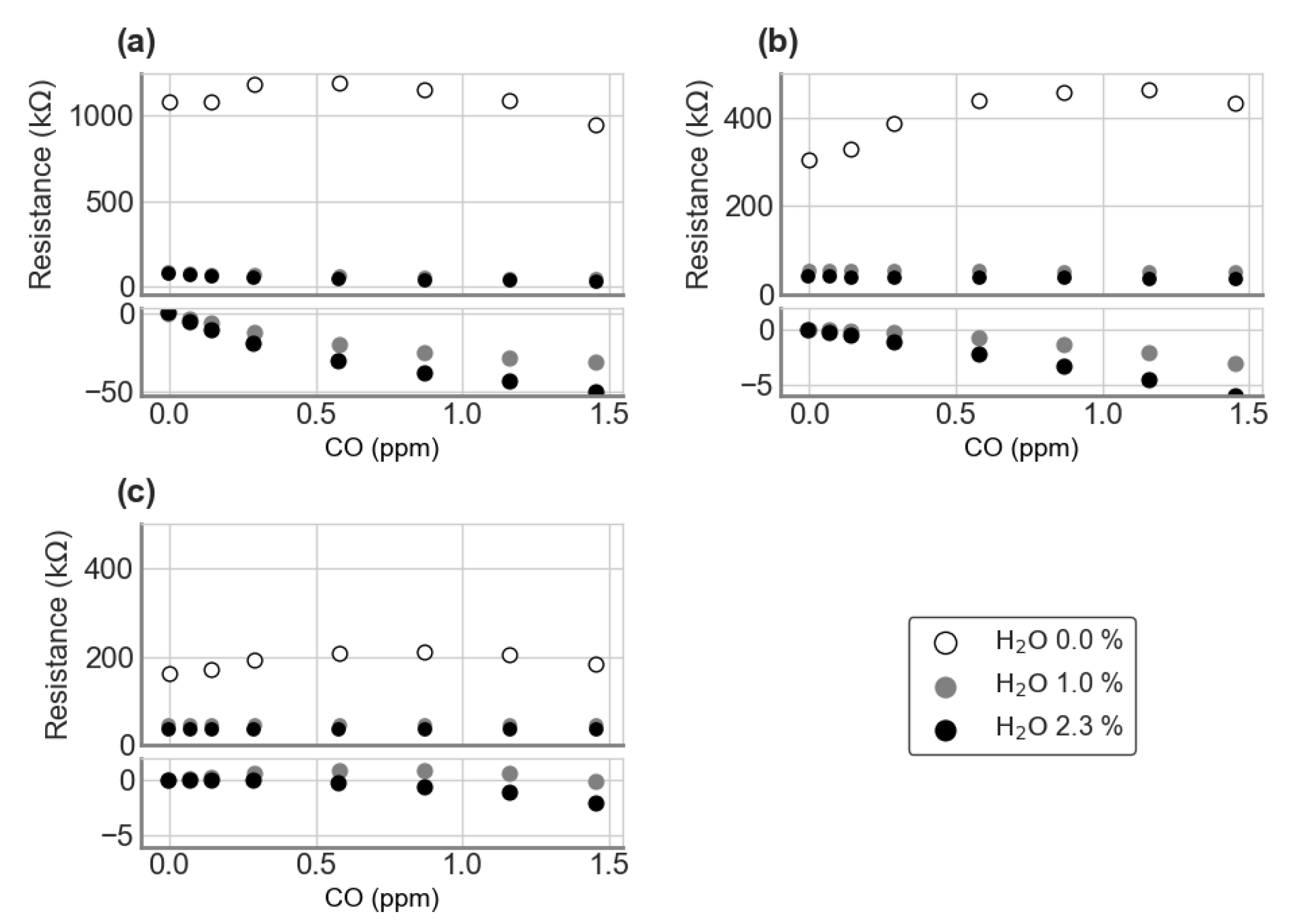
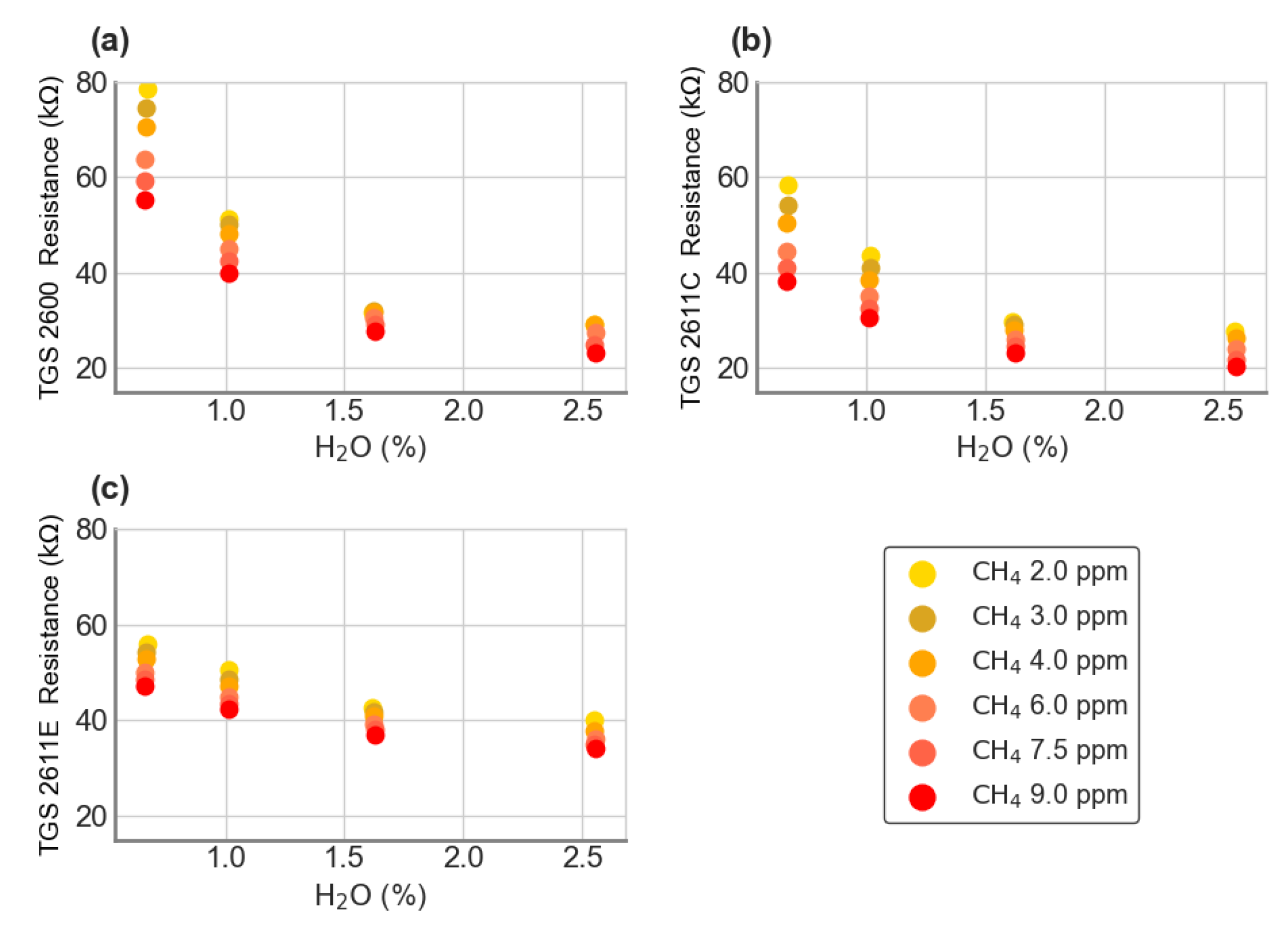
4.1. Sensitivities of Low-Cost Sensors
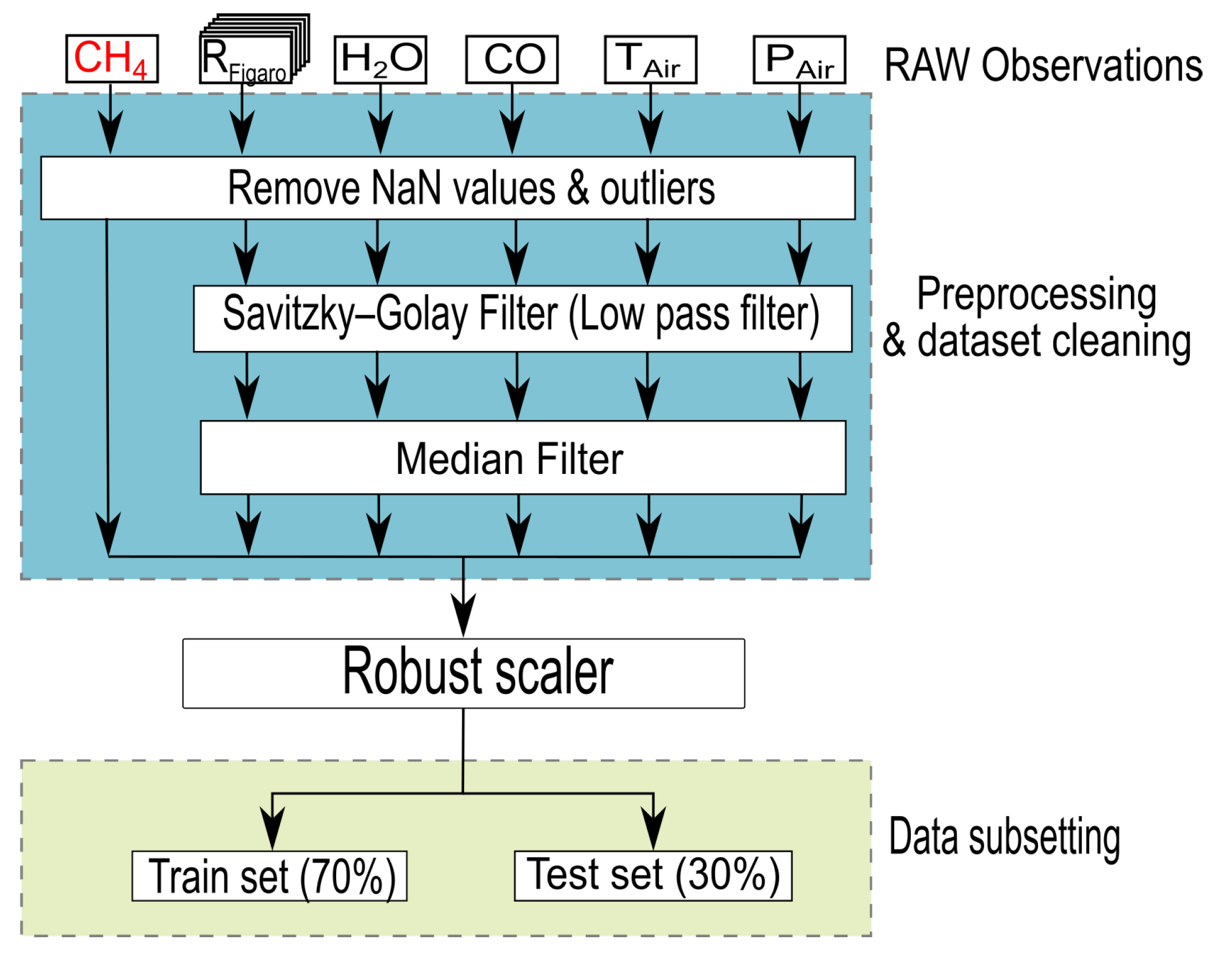
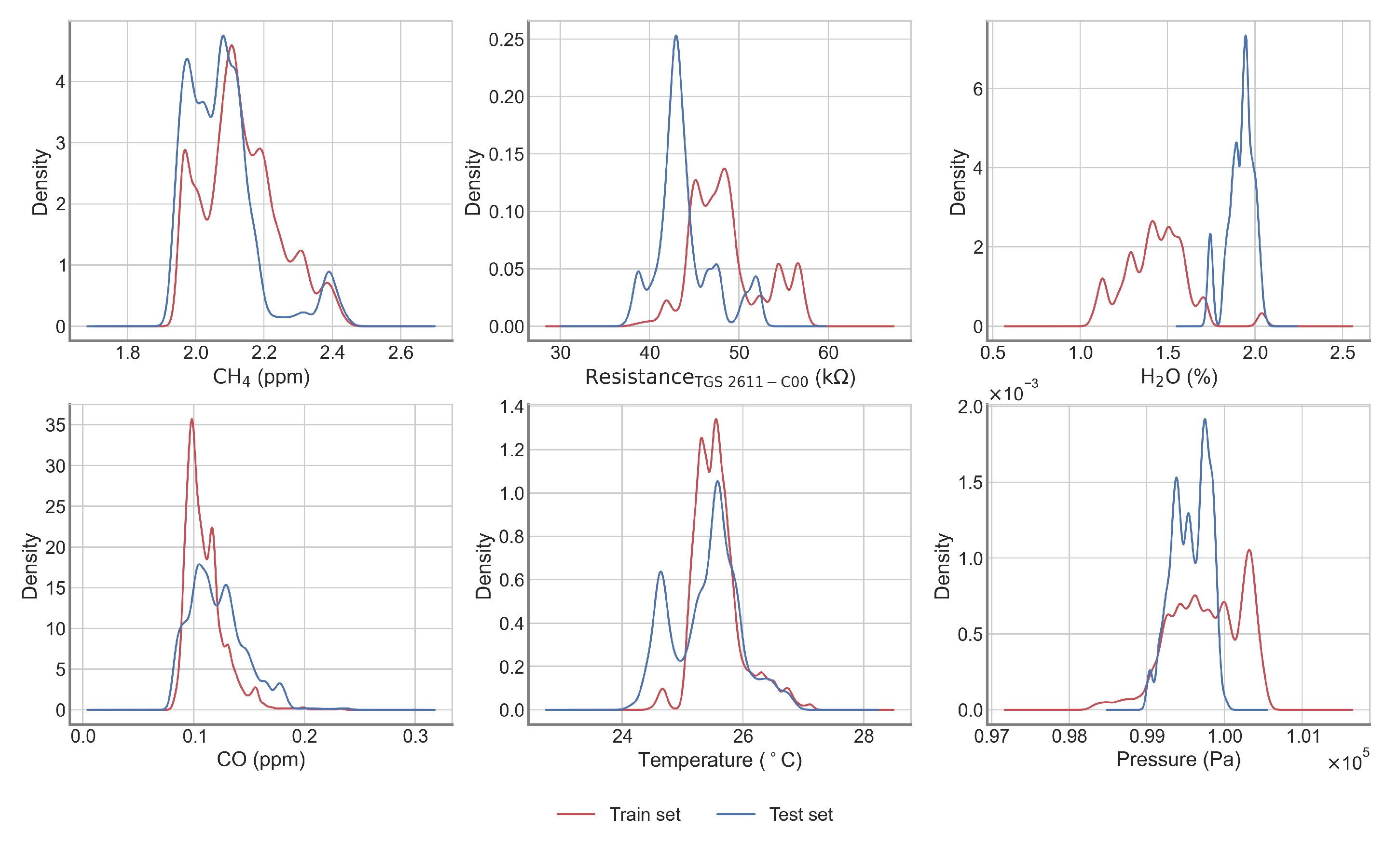
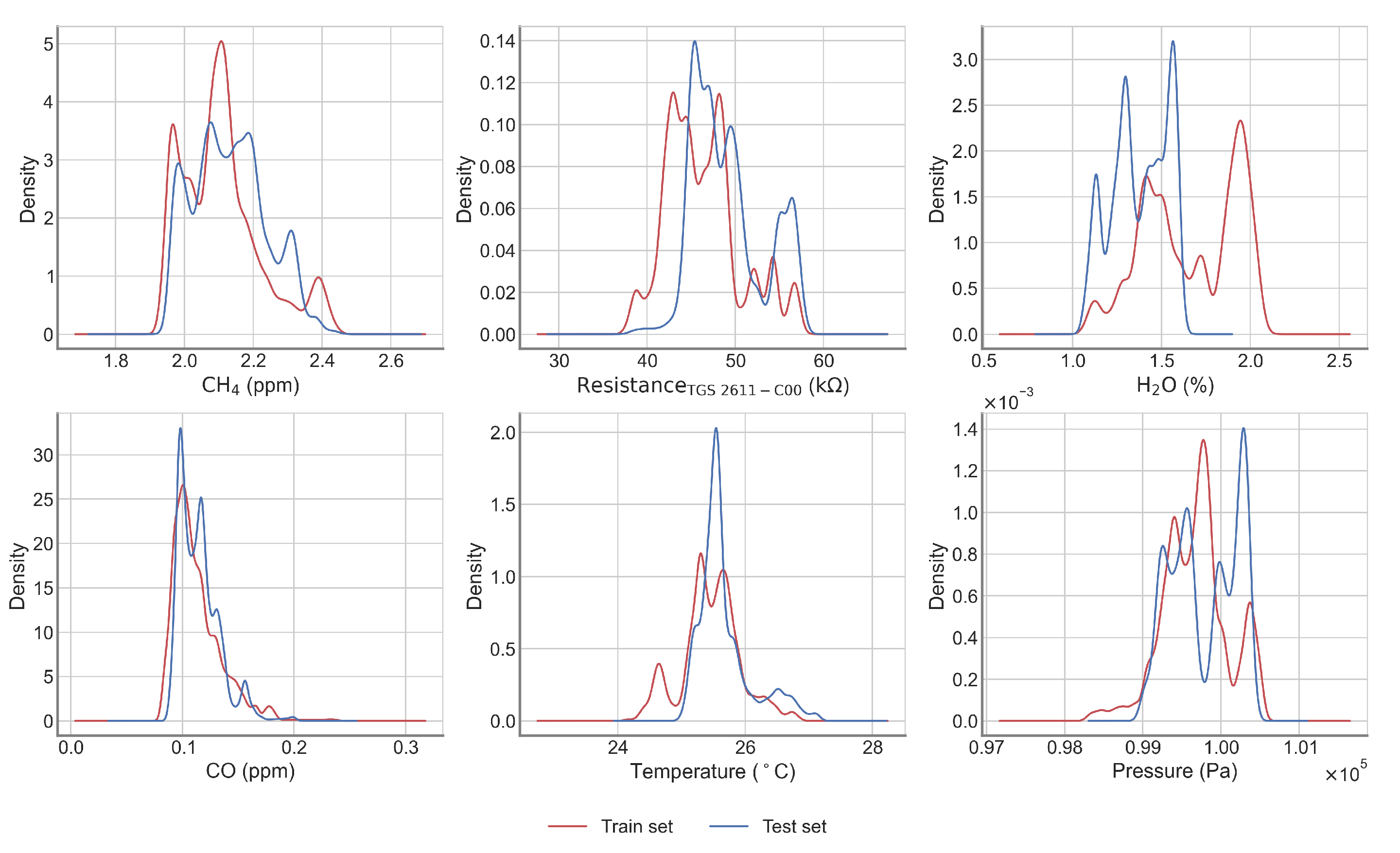
4.2. Data Pre-Processing for MLP Model
4.3. Room Air Measurements
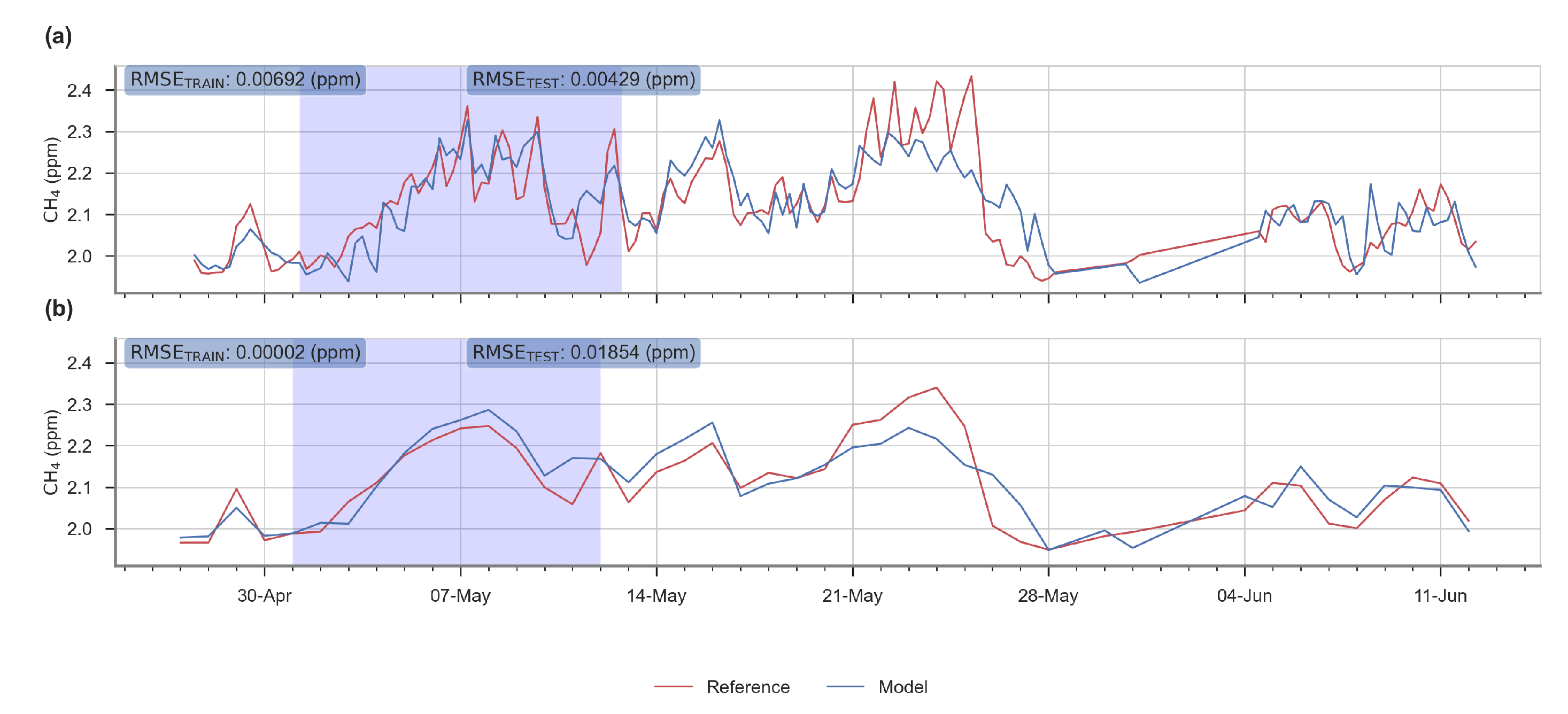
4.4. Evaluation of the MLP Model
4.5. Sensitivity of MLP Model to Input Variables
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
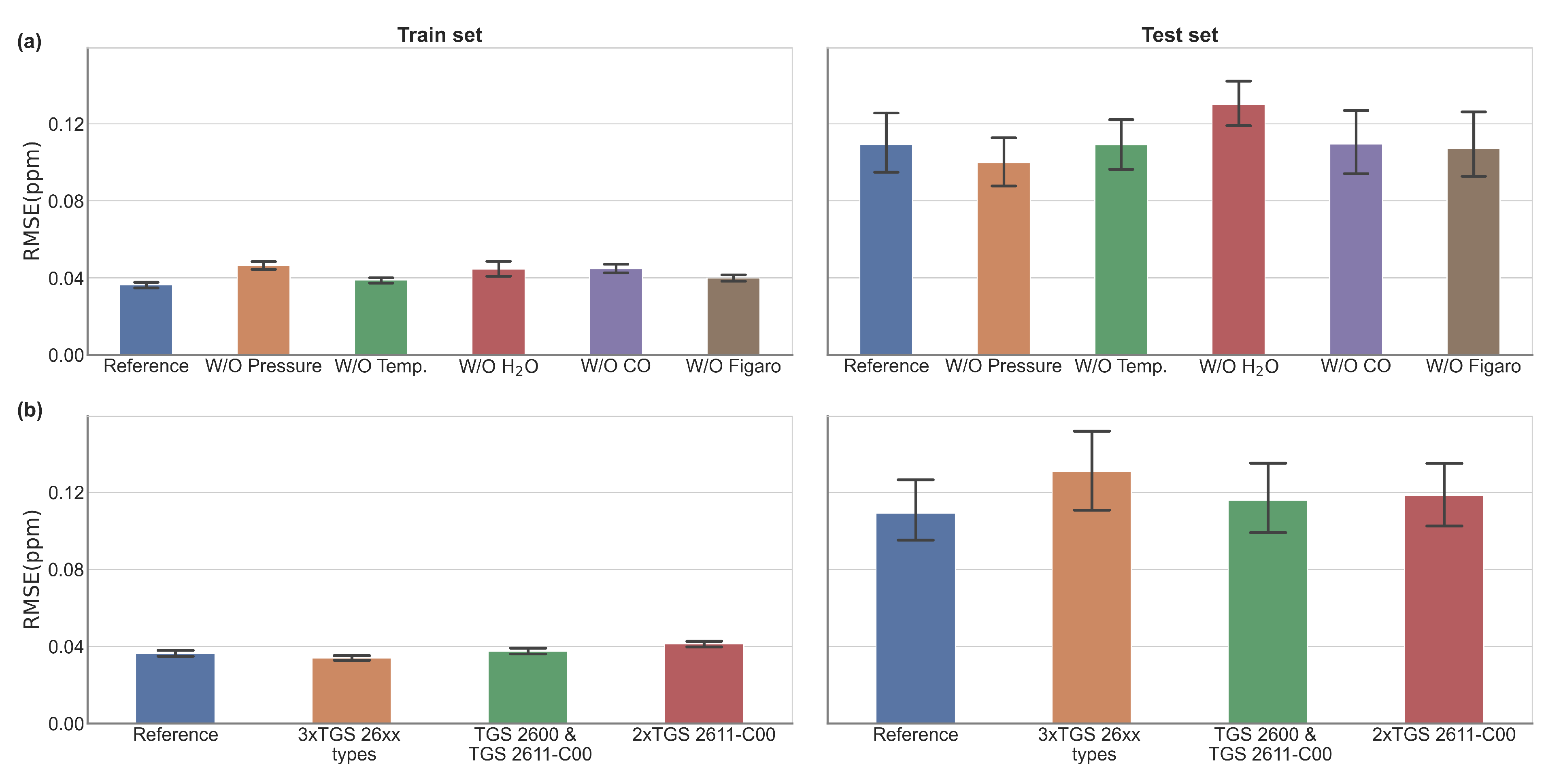
| Mean MSD () | Mean RMSE (ppm) | ||
|---|---|---|---|
| Reference | 0.001352331 | 0.036774055 | |
| W/O Pressure | 0.002216097 | 0.047075444 | |
| W/O Temperature | 0.001535907 | 0.039190651 | |
| 0.002176811 | 0.046656307 | ||
| Training set | W/O CO | 0.002071878 | 0.045517882 |
| W/O Figaro | 0.001626768 | 0.040333216 | |
| 3xTGS 26xx types | 0.001183233 | 0.034398159 | |
| TGS 2600 & TGS 2611-C00 | 0.001441292 | 0.037964357 | |
| 2xTGS 2611-C00 | 0.001723121 | 0.04151049 | |
| Reference | 0.014911814 | 0.122113937 | |
| W/O Pressure | 0.012041034 | 0.109731645 | |
| W/O Temperature | 0.014275558 | 0.119480365 | |
| 0.018681443 | 0.136680075 | ||
| Test set | W/O CO | 0.015550217 | 0.124700508 |
| W/O Figaro | 0.015273629 | 0.123586523 | |
| 3xTGS 26xx types | 0.0224715 | 0.14990497 | |
| TGS 2600 & TGS 2611-C00 | 0.0178823 | 0.133724719 | |
| 2xTGS 2611-C00 | 0.01768717 | 0.132993119 |
References
- Saunois, M.; Bousquet, P.; Poulter, B.; Peregon, A.; Ciais, P.; Canadell, J.G.; Dlugokencky, E.J.; Etiope, G.; Bastviken, D.; Houweling, S.; et al. The global methane budget 2000–2012. Earth Syst. Sci. Data 2016, 8, 697–751. [Google Scholar] [CrossRef]
- Alvarez, R.A.; Zavala-Araiza, D.; Lyon, D.R.; Allen, D.T.; Barkley, Z.R.; Brandt, A.R.; Davis, K.J.; Herndon, S.C.; Jacob, D.J.; Karion, A.; et al. Assessment of methane emissions from the U.S. oil and gas supply chain. Science 2018, 361, 186–188. [Google Scholar] [CrossRef] [PubMed]
- Collier-Oxandale, A.; Gordon Casey, J.; Piedrahita, R.; Ortega, J.; Halliday, H.; Johnston, J.; Hannigan, M.P. Assessing a low-cost methane sensor quantification system for use in complex rural and urban environments. Atmos. Meas. Tech. 2018, 11, 3569–3594. [Google Scholar] [CrossRef]
- Duren, R.M.; Thorpe, A.K.; Foster, K.T.; Rafiq, T.; Hopkins, F.M.; Yadav, V.; Bue, B.D.; Thompson, D.R.; Conley, S.; Colombi, N.K.; et al. California’s methane super-emitters. Nature 2019, 575, 180–184. [Google Scholar] [CrossRef]
- Ars, S.; Broquet, G.; Kwok, C.Y.; Roustan, Y.; Wu, L.; Arzoumanian, E.; Bousquet, P. Statistical atmospheric inversion of local gas emissions by coupling the tracer release technique and local-scale transport modelling: A test case with controlled methane emissions. Atmos. Meas. Tech. 2017, 10, 5017–5037. [Google Scholar] [CrossRef]
- Yver Kwok, C.; Laurent, O.; Guemri, A.; Philippon, C.; Wastine, B.; Rella, C.W.; Vuillemin, C.; Truong, F.; Delmotte, M.; Kazan, V.; et al. Comprehensive laboratory and field testing of cavity ring-down spectroscopy analyzers measuring H2O, CO2, CH4 and CO. Atmos. Meas. Tech. 2015, 8, 3867–3892. [Google Scholar] [CrossRef]
- Feitz, A.; Schroder, I.; Phillips, F.; Coates, T.; Neghandhi, K.; Day, S.; Luhar, A.; Bhatia, S.; Edwards, G.; Hrabar, S.; et al. The Ginninderra CH4 and CO2 release experiment: An evaluation of gas detection and quantification techniques. Int. J. Greenh. Gas Control 2018, 70, 202–224. [Google Scholar] [CrossRef]
- Ayalneh Berhanu, T.; Satar, E.; Schanda, R.; Nyfeler, P.; Moret, H.; Brunner, D.; Oney, B.; Leuenberger, M. Measurements of greenhouse gases at Beromünster tall-tower station in Switzerland. Atmos. Meas. Tech. 2016, 9, 2603–2614. [Google Scholar] [CrossRef]
- Rella, C.W.; Chen, H.; Andrews, A.E.; Filges, A.; Gerbig, C.; Hatakka, J.; Karion, A.; Miles, N.L.; Richardson, S.J.; Steinbacher, M.; et al. High accuracy measurements of dry mole fractions of carbon dioxide and methane in humid air. Atmos. Meas. Tech. 2013, 6, 837–860. [Google Scholar] [CrossRef]
- Pison, I.; Berchet, A.; Saunois, M.; Bousquet, P.; Broquet, G.; Conil, S.; Delmotte, M.; Ganesan, A.; Laurent, O.; Martin, D.; et al. How a European network may help with estimating methane emissions on the French national scale. Atmos. Chem. Phys. 2018, 18, 3779–3798. [Google Scholar] [CrossRef]
- Kumar, P.; Feiz, A.A.; Singh, S.K.; Ngae, P.; Turbelin, G. Reconstruction of an atmospheric tracer source in an urban-like environment. J. Geophys. Res. 2015, 120, 12589–12604. [Google Scholar] [CrossRef]
- Collier-Oxandale, A.M.; Thorson, J.; Halliday, H.; Milford, J.; Hannigan, M. Understanding the ability of low-cost MOx sensors to quantify ambient VOCs. Atmos. Meas. Tech. 2019, 12, 1441–1460. [Google Scholar] [CrossRef]
- Chaiyboun, A.; Traute, R.; Haas, T.; Kiesewetter, O.; Doll, T. A logarithmic multi-parameter model using gas sensor main and cross sensitivities to estimate gas concentrations in a gas mixture for SnO2 gas sensors. Sens. Actuators B Chem. 2007, 123, 1064–1070. [Google Scholar] [CrossRef]
- Figaro TGS2600 (Air Quality Sensor). Available online: https://www.figaro.co.jp/en/product/entry/tgs2600.html (accessed on 10 February 2020).
- Figaro TGS2611-C00 (Methane Sensor). Available online: https://www.figaro.co.jp/en/product/entry/tgs2611-c00.html (accessed on 10 February 2020).
- Xueref-Remy, I.; Zazzeri, G.; Bréon, F.; Vogel, F.; Ciais, P.; Lowry, D.; Nisbet, E. Anthropogenic methane plume detection from point sources in the Paris megacity area and characterization of their δ13C signature. Atmos. Environ. 2019, 117055. [Google Scholar] [CrossRef]
- Picarro Inc. G2401 Analyzer for User’s Guide; Picarro Inc.: Santa Clara, CA, USA, 2017. [Google Scholar]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representation by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Cybenko, G. Approximation by superpositions of a sigmoidal function. Math. Control Signals Syst. 1989, 2, 303–314. [Google Scholar] [CrossRef]
- Hornik, K.; Stinchcombe, M.; White, H. Multilayer feedforward networks are universal approximators. Neural Netw. 1989, 2, 359–366. [Google Scholar] [CrossRef]
- Bishop, C.; Bishop, P.; Hinton, G.; Press, O.U. Neural Networks for Pattern Recognition; Advanced Texts in Econometrics; Clarendon Press: Oxford, UK, 1995. [Google Scholar]
- Gardner, M.W.; Dorling, S.R. Artificial neural networks (the multilayer perceptron)—A review of applications in the atmospheric sciences. Atmos. Environ. 1998, 32, 2627–2636. [Google Scholar] [CrossRef]
- Haykin, S. Neural networks: A comprehensive foundation; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1994. [Google Scholar]
- Casey, J.G.; Collier-Oxandale, A.; Hannigan, M. Performance of artificial neural networks and linear models to quantify 4 trace gas species in an oil and gas production region with low-cost sensors. Sens. Actuators B Chem. 2019, 283, 504–514. [Google Scholar] [CrossRef]
- Géron, A. Hands-On Machine Learning with Scikit-Learn, Keras, and TensorFlow: Concepts, Tools, and Techniques to Build Intelligent Systems; O’Reilly Media: Bodega Avenue Sebastopol, CA, USA, 2019. [Google Scholar]
- Varoquaux, G.; Buitinck, L.; Louppe, G.; Grisel, O.; Pedregosa, F.; Mueller, A. Scikit-learn. Getmobile Mob. Comput. Commun. 2015, 19, 29–33. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016; Available online: http://www.deeplearningbook.org (accessed on 18 April 2020).
- Press, W.H.; Teukolsky, S.A. Savitzky-Golay Smoothing Filters. Comput. Phys. 1990, 4, 669. [Google Scholar] [CrossRef]
- Hagan, M.; Demuth, H.; Beale, M.; De Jesús, O. Neural Network Design; Martin Hagan: Pittsburgh, PA, USA, 2014. [Google Scholar]
- Shahid, A.; Choi, J.H.; Rana, A.U.H.S.; Kim, H.S. Least squares neural network-based wireless E-nose system using an SnO2 sensor array. Sensors 2018, 18, 1446. [Google Scholar] [CrossRef] [PubMed]
- Spinelle, L.; Gerboles, M.; Villani, M.G.; Aleixandre, M.; Bonavitacola, F. Field calibration of a cluster of low-cost available sensors for air quality monitoring. Part A: Ozone and nitrogen dioxide. Sens. Actuators B Chem. 2015, 215, 249–257. [Google Scholar] [CrossRef]
- Spinelle, L.; Gerboles, M.; Villani, M.G.; Aleixandre, M.; Bonavitacola, F. Field calibration of a cluster of low-cost commercially available sensors for air quality monitoring. Part B: NO, CO and CO2. Sens. Actuators B Chem. 2017, 238, 706–715. [Google Scholar] [CrossRef]
- Esposito, E.; De Vito, S.; Salvato, M.; Bright, V.; Jones, R.L.; Popoola, O. Dynamic neural network architectures for on field stochastic calibration of indicative low cost air quality sensing systems. Sens. Actuators B Chem. 2016, 231, 701–713. [Google Scholar] [CrossRef]
- Cordero, J.M.; Borge, R.; Narros, A. Using statistical methods to carry out in field calibrations of low cost air quality sensors. Sens. Actuators B Chem. 2018, 267, 245–254. [Google Scholar] [CrossRef]
- Eugster, W.; Laundre, J.; Eugster, J.; Kling, G.W. Long-term reliability of the Figaro TGS 2600 solid-state methane sensor under low-Arctic conditions at Toolik Lake, Alaska. Atmos. Meas. Tech. 2020, 13, 2681–2695. [Google Scholar] [CrossRef]
- Riddick, S.N.; Mauzerall, D.L.; Celia, M.; Allen, G.; Pitt, J.; Kang, M.; Riddick, J.C. The calibration and deployment of a low-cost methane sensor. Atmos. Environ. 2020, 230, 117440. [Google Scholar] [CrossRef]











| # of Obs. | 49,103 | 49,103 | 49,103 | 49,103 | 49,103 | |
| mean | 2.12 | 32,356.48 | 32,487.65 | 47,193.12 | 49,262.97 | |
| 0.11 | 5948.07 | 5969.96 | 4352.56 | 4891.01 | ||
| min | 1.94 | 18,446.51 | 18,871.92 | 37,504.39 | 37,768.43 | |
| max | 2.45 | 47,262.67 | 47,418.24 | 57,590.59 | 60,616.80 | |
| 25% | 2.03 | 28,881.76 | 28,848.63 | 44,136.81 | 45,890.21 | |
| 50% | 2.10 | 31,584.97 | 31,633.92 | 46,706.42 | 48,884.94 | |
| 75% | 2.18 | 34,994.97 | 35,015.34 | 49,233.17 | 51,842.68 | |
| 5.35 | 18.38 | 18.38 | 9.22 | 9.93 | ||
| P (Pa) | ||||||
| # of Obs. | 49,103 | 49,103 | 49,103 | 49,103 | 49,103 | 49,103 |
| mean | 60,425.14 | 63,378.21 | 1.58 | 0.11 | 25.53 | 99,709.67 |
| 3010.45 | 6234.00 | 0.27 | 0.02 | 0.46 | 420.74 | |
| min | 52,472.35 | 54,468.19 | 1.07 | 0.08 | 24.11 | 98,289.72 |
| max | 79,018.36 | 93,671.74 | 2.07 | 0.24 | 27.15 | 100,528.79 |
| 25% | 58,255.57 | 59,549.05 | 1.38 | 0.10 | 25.29 | 99,406.22 |
| 50% | 60,227.14 | 61,428.60 | 1.52 | 0.11 | 25.52 | 99,698.57 |
| 75% | 61,792.62 | 64,557.91 | 1.87 | 0.12 | 25.74 | 100,004.34 |
| 4.98 | 9.84 | 17.17 | 18.38 | 1.81 | 0.42 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rivera Martinez, R.; Santaren, D.; Laurent, O.; Cropley, F.; Mallet, C.; Ramonet, M.; Caldow, C.; Rivier, L.; Broquet, G.; Bouchet, C.; et al. The Potential of Low-Cost Tin-Oxide Sensors Combined with Machine Learning for Estimating Atmospheric CH4 Variations around Background Concentration. Atmosphere 2021, 12, 107. https://doi.org/10.3390/atmos12010107
Rivera Martinez R, Santaren D, Laurent O, Cropley F, Mallet C, Ramonet M, Caldow C, Rivier L, Broquet G, Bouchet C, et al. The Potential of Low-Cost Tin-Oxide Sensors Combined with Machine Learning for Estimating Atmospheric CH4 Variations around Background Concentration. Atmosphere. 2021; 12(1):107. https://doi.org/10.3390/atmos12010107
Chicago/Turabian StyleRivera Martinez, Rodrigo, Diego Santaren, Olivier Laurent, Ford Cropley, Cécile Mallet, Michel Ramonet, Christopher Caldow, Leonard Rivier, Gregoire Broquet, Caroline Bouchet, and et al. 2021. "The Potential of Low-Cost Tin-Oxide Sensors Combined with Machine Learning for Estimating Atmospheric CH4 Variations around Background Concentration" Atmosphere 12, no. 1: 107. https://doi.org/10.3390/atmos12010107
APA StyleRivera Martinez, R., Santaren, D., Laurent, O., Cropley, F., Mallet, C., Ramonet, M., Caldow, C., Rivier, L., Broquet, G., Bouchet, C., Juery, C., & Ciais, P. (2021). The Potential of Low-Cost Tin-Oxide Sensors Combined with Machine Learning for Estimating Atmospheric CH4 Variations around Background Concentration. Atmosphere, 12(1), 107. https://doi.org/10.3390/atmos12010107