Capturing Plume Rise and Dispersion with a Coupled Large-Eddy Simulation: Case Study of a Prescribed Burn


Abstract
:1. Introduction
2. Methods
2.1. Observational Data
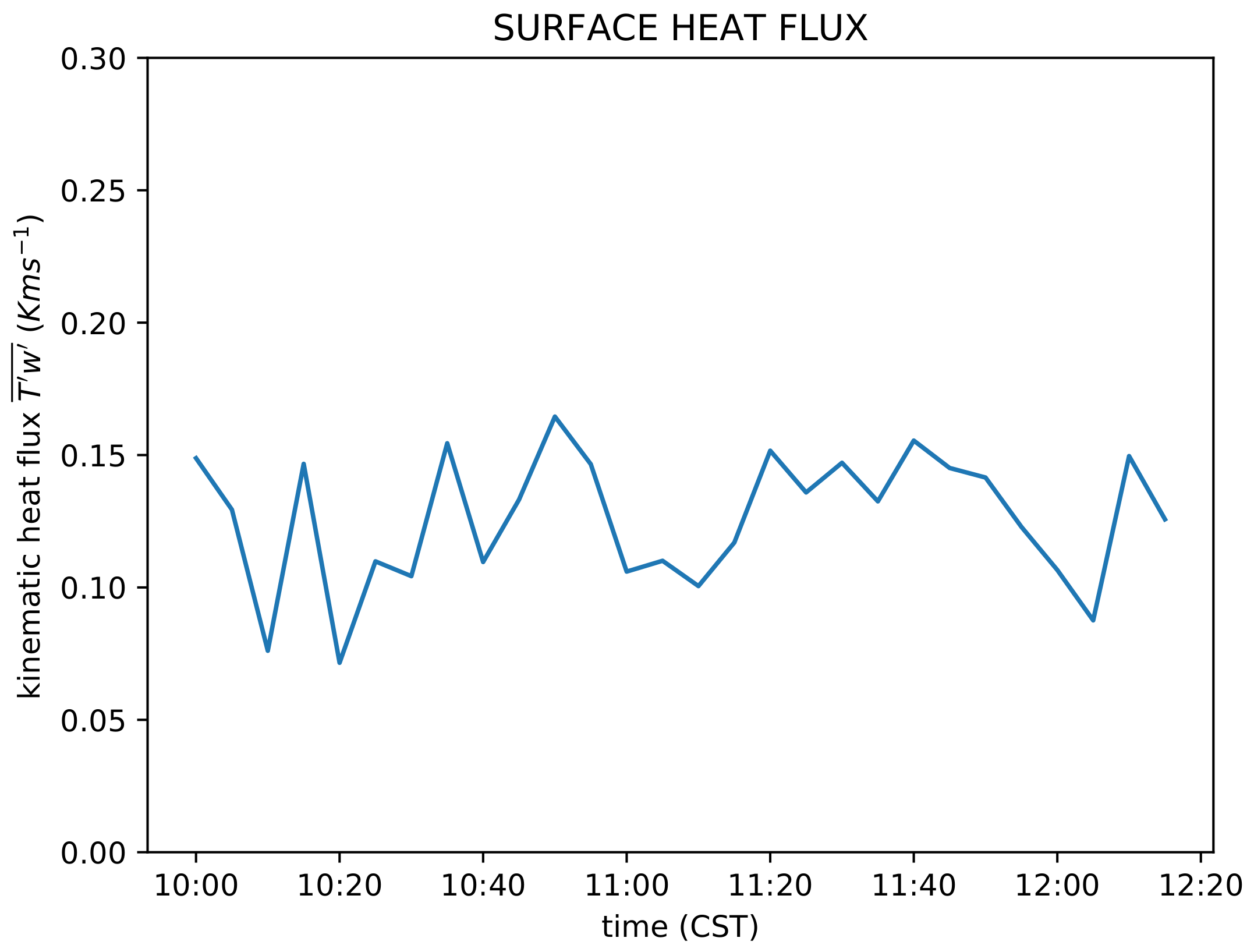
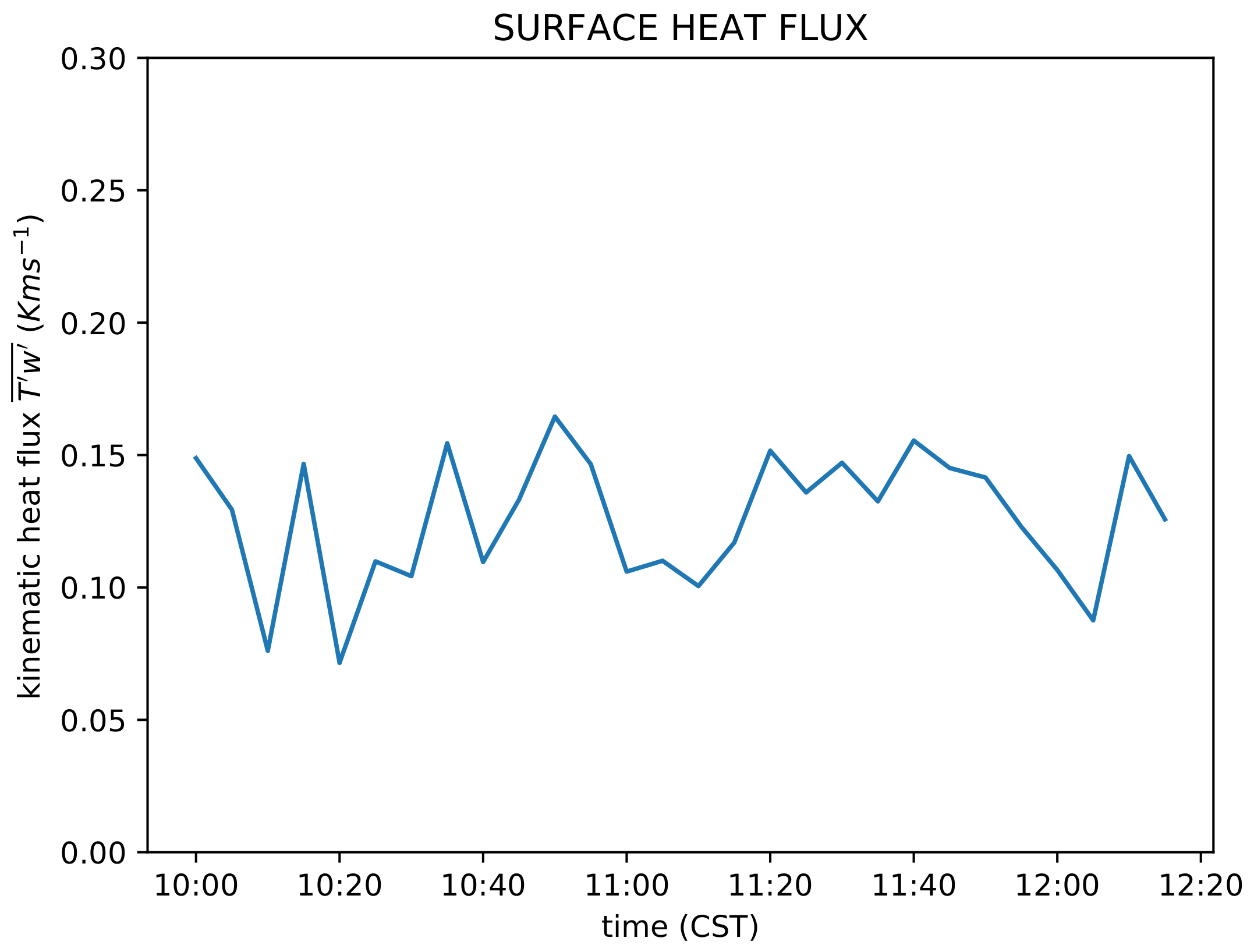
2.2. Numerical Setup
3. Results
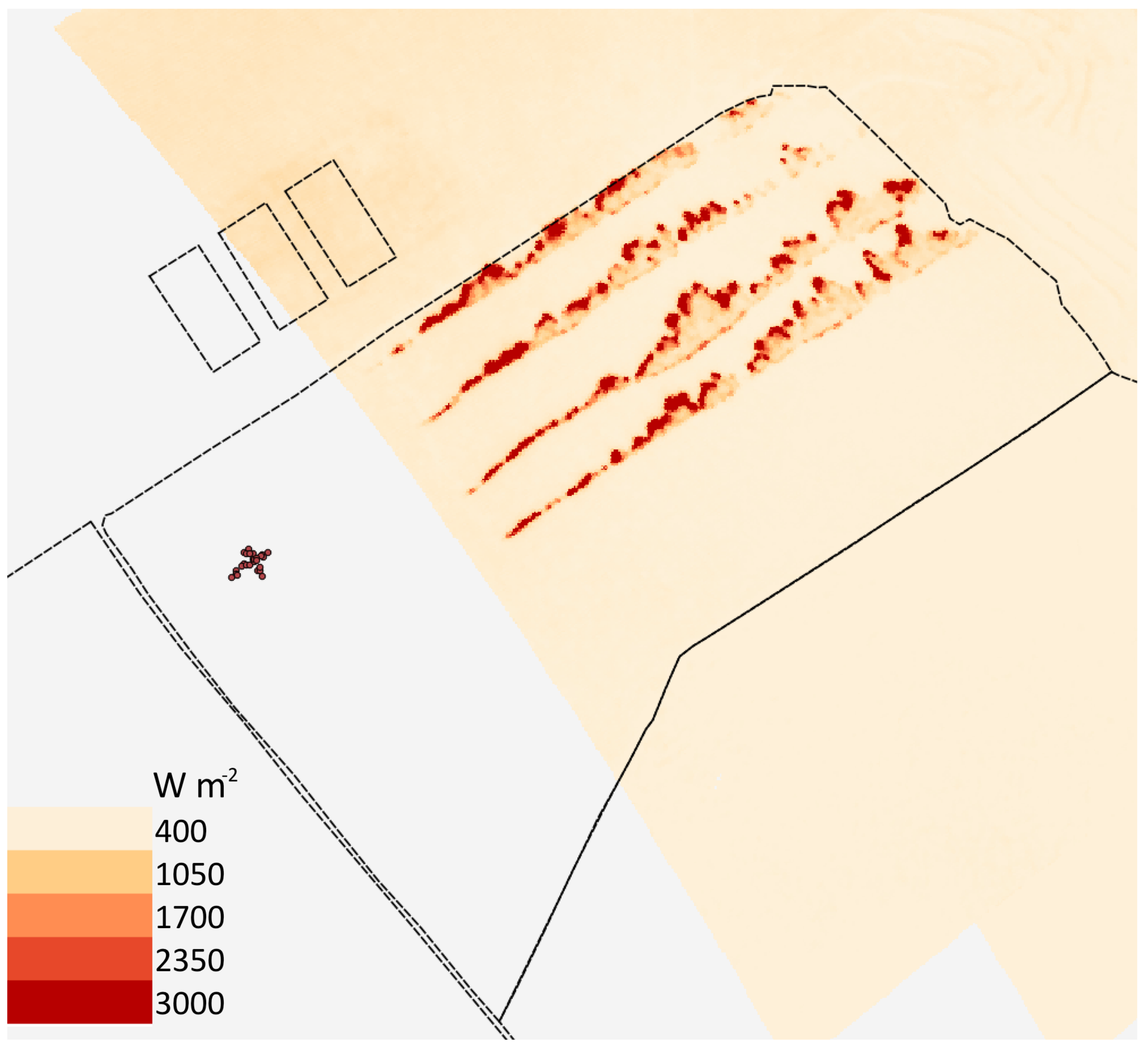
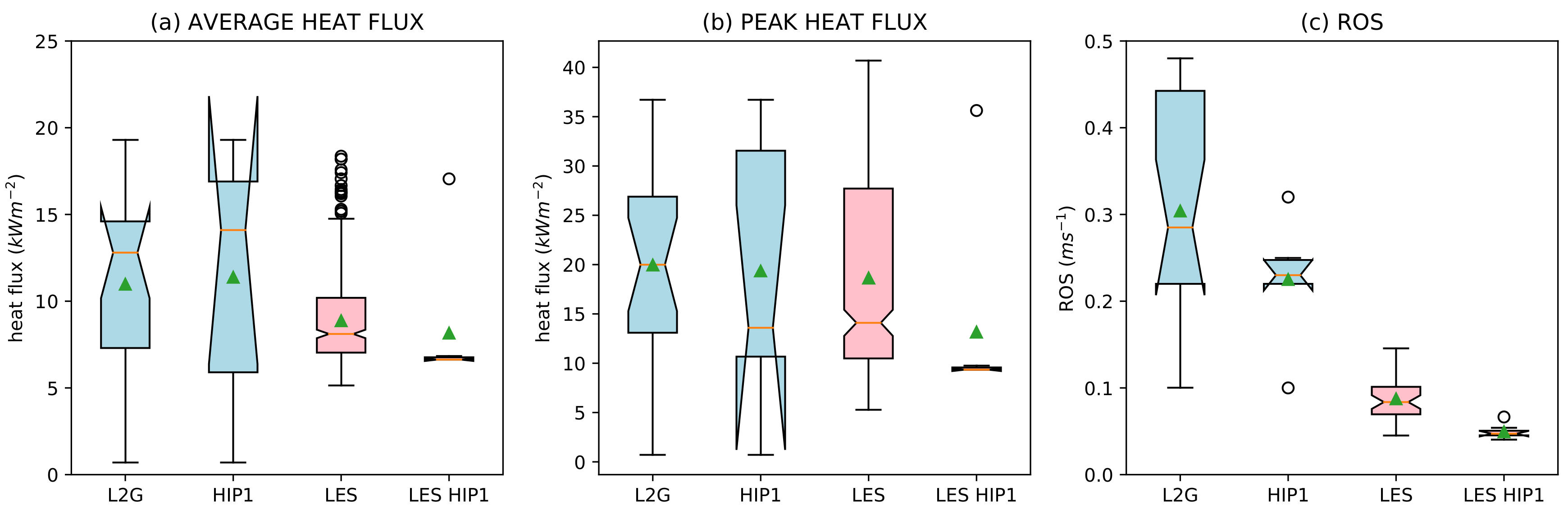
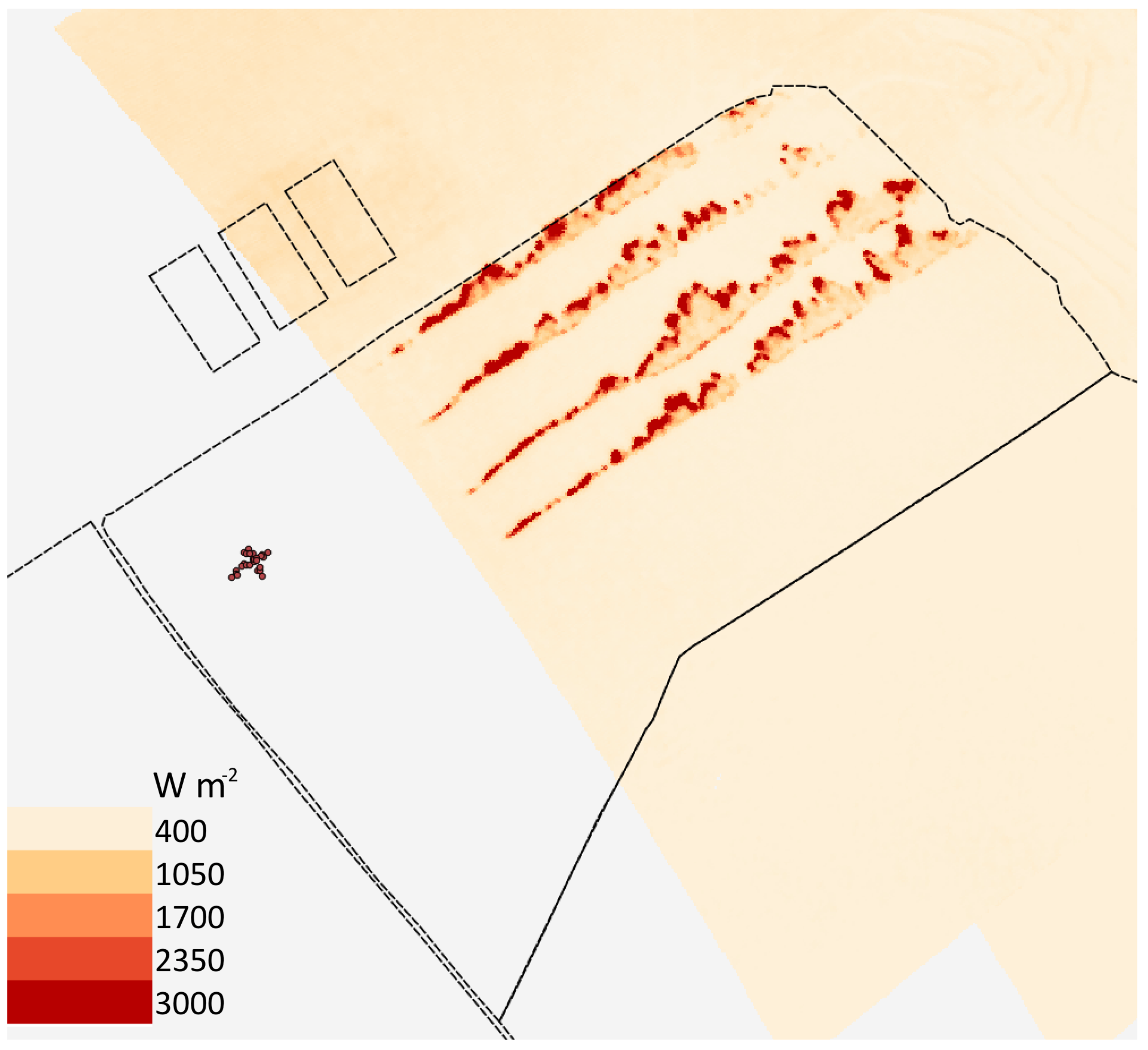
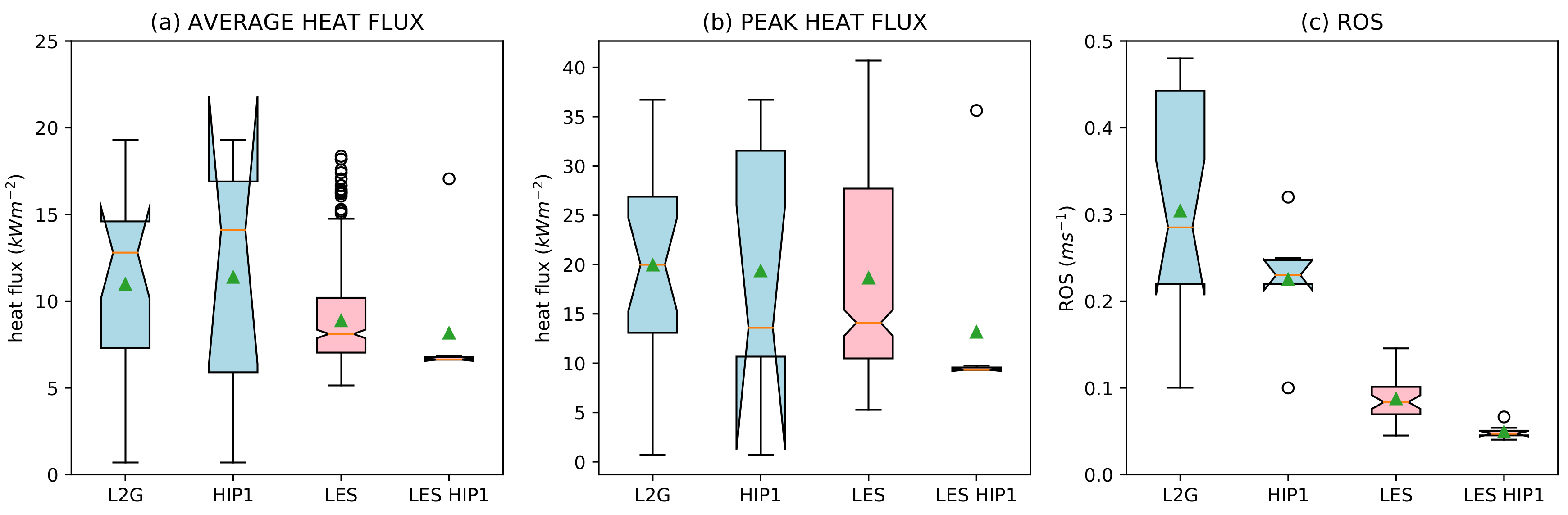
3.1. Fire Behavior
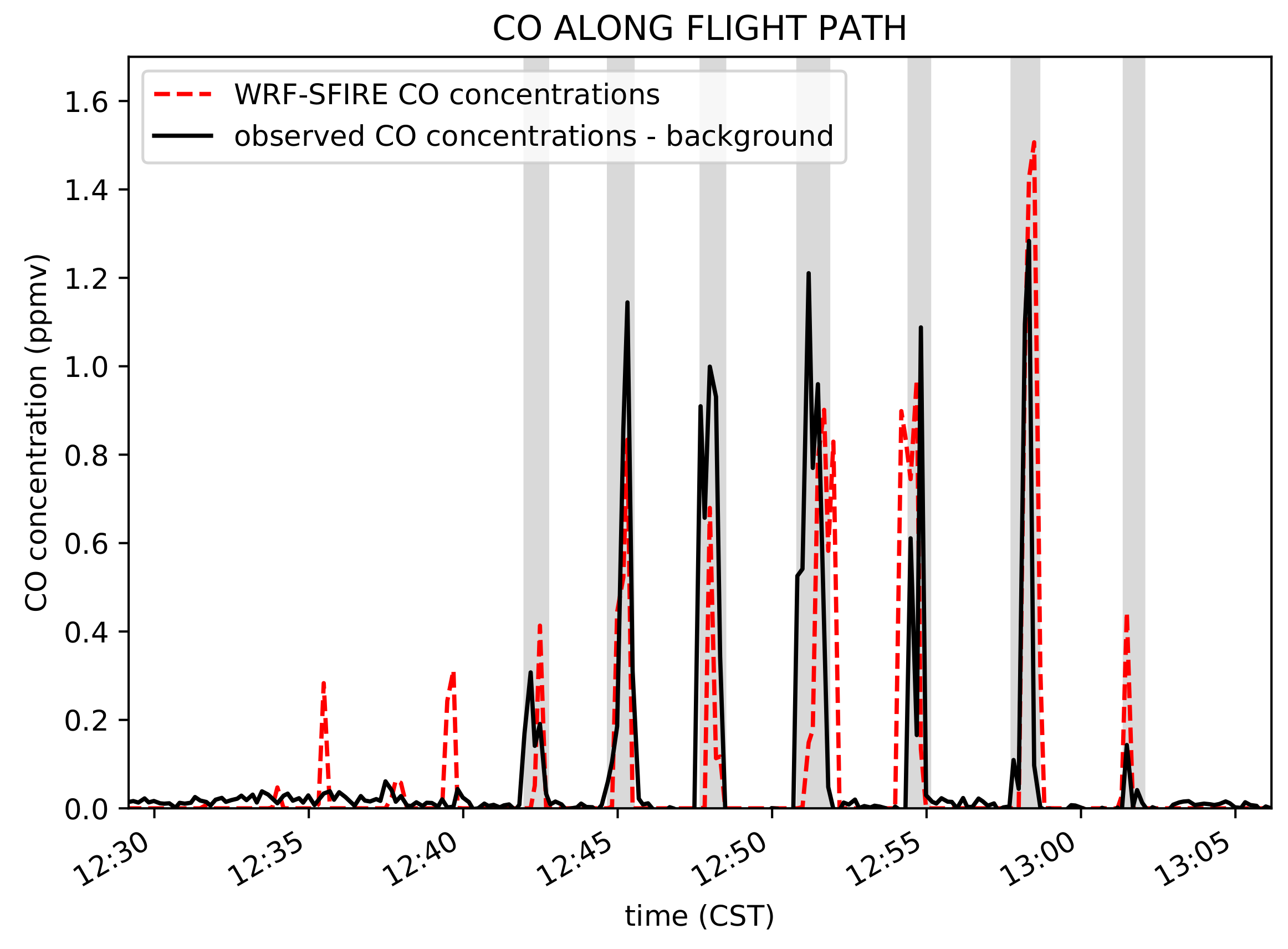
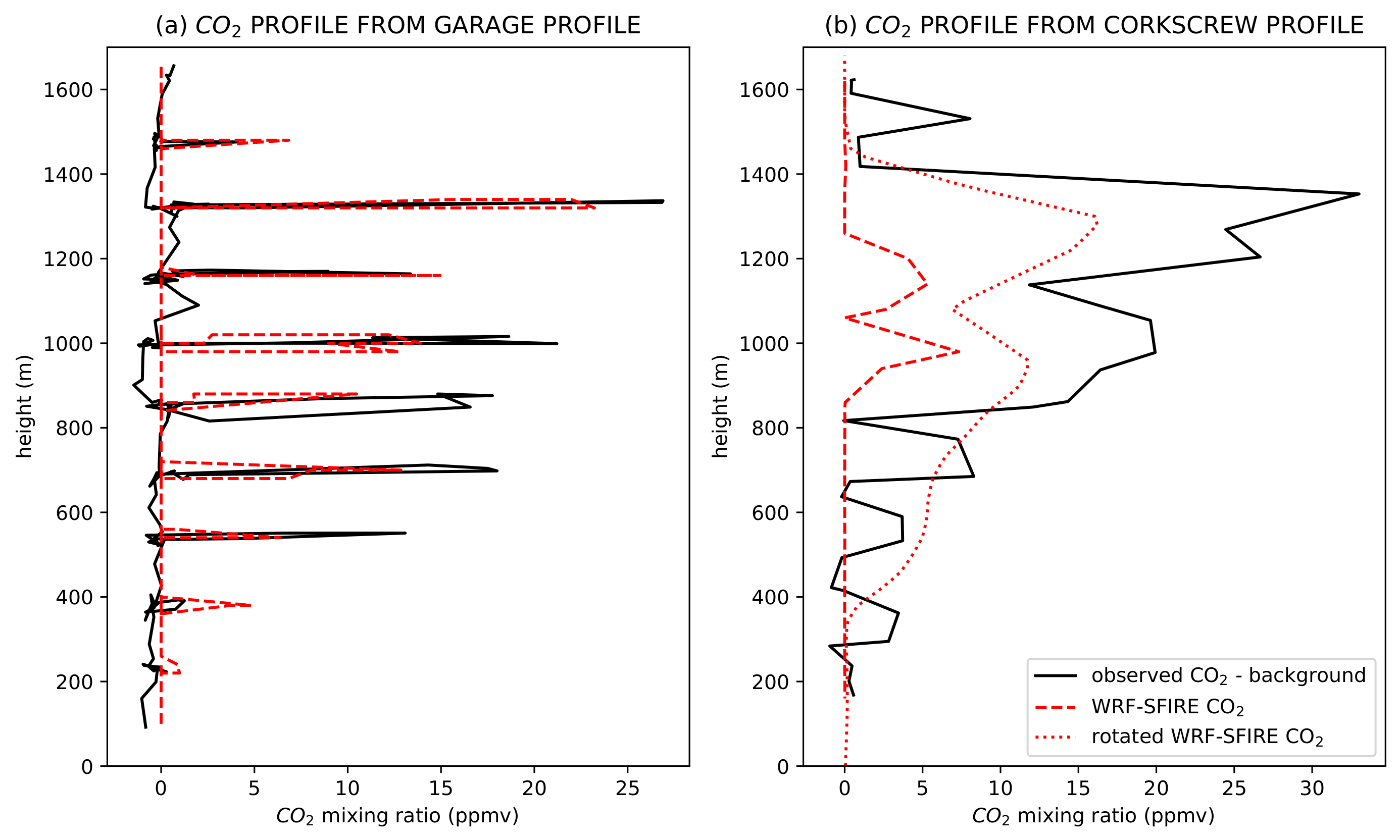
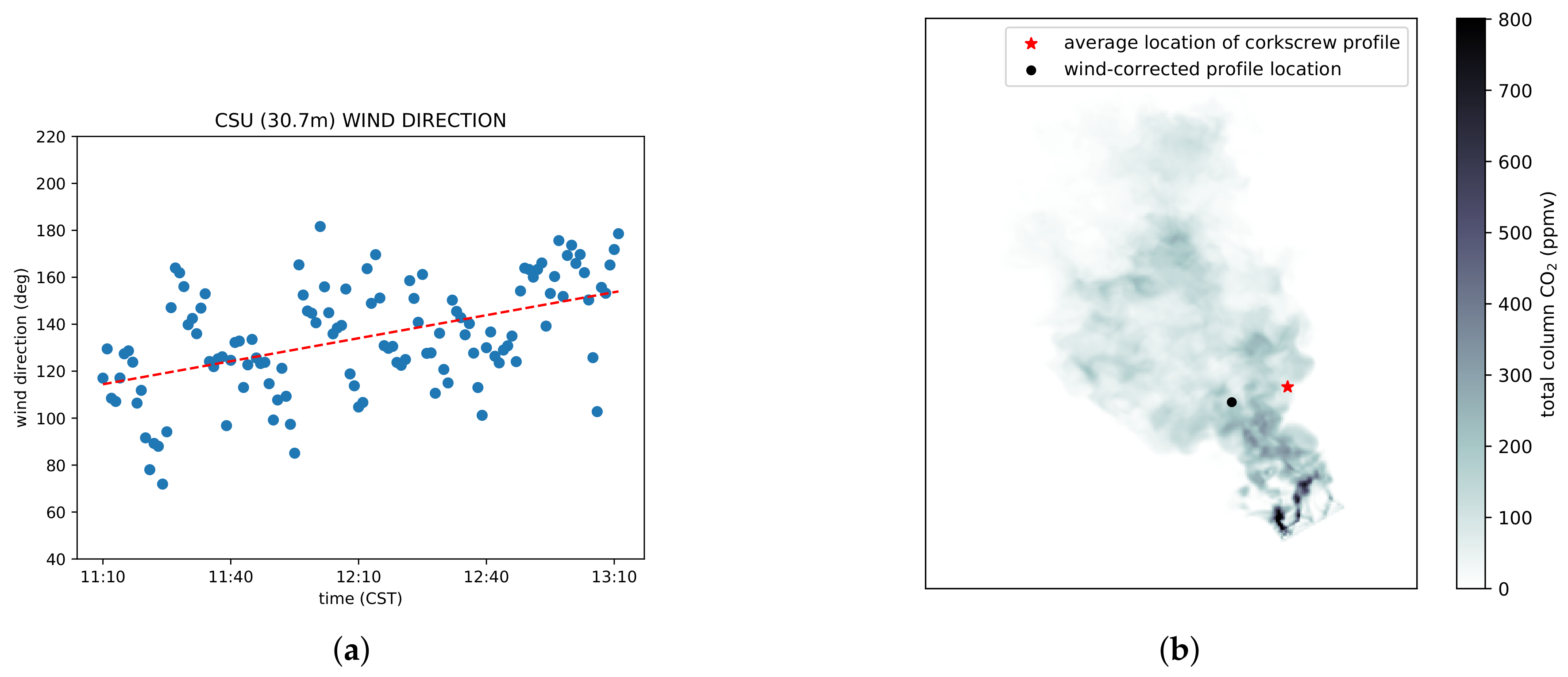
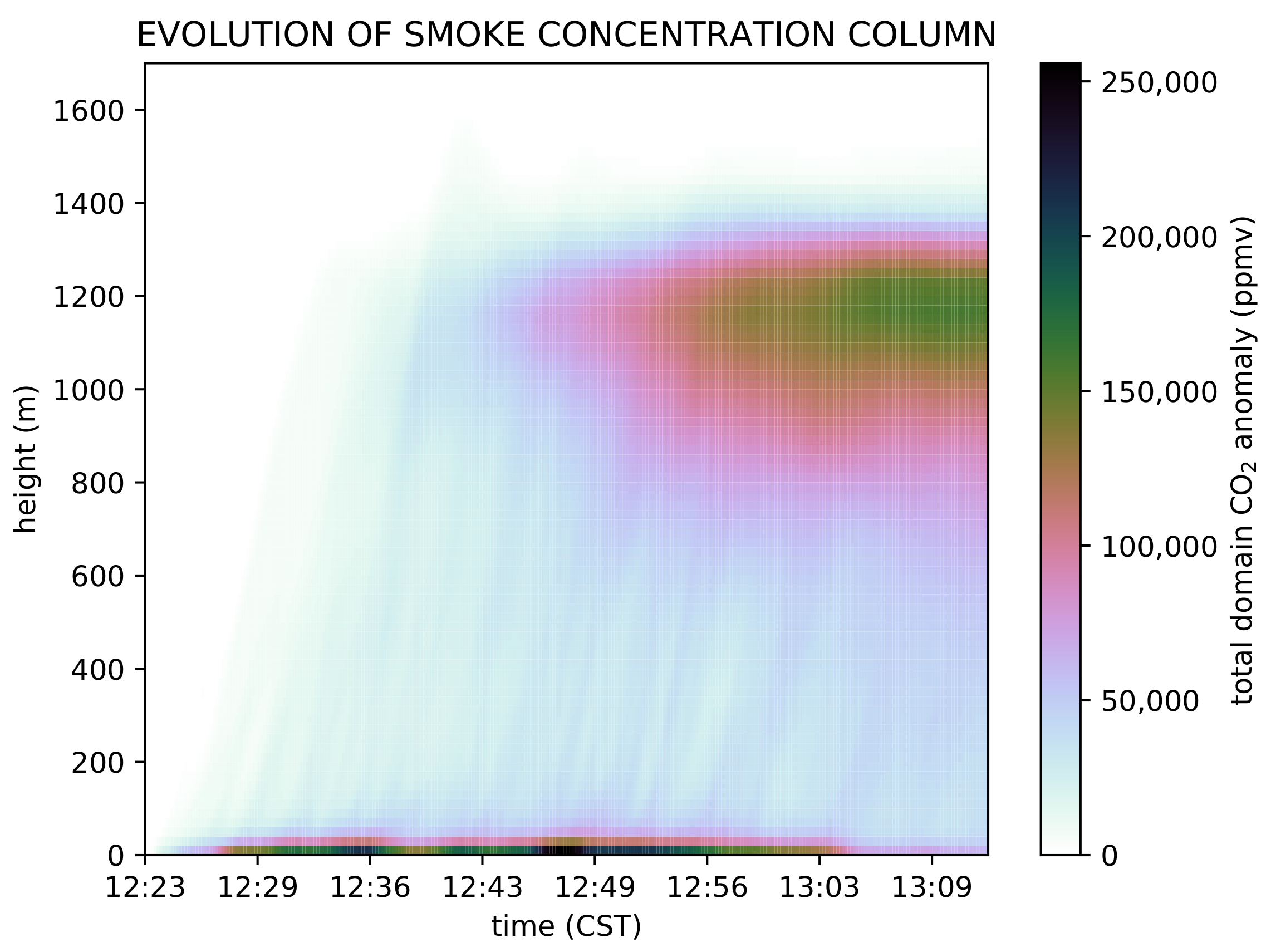
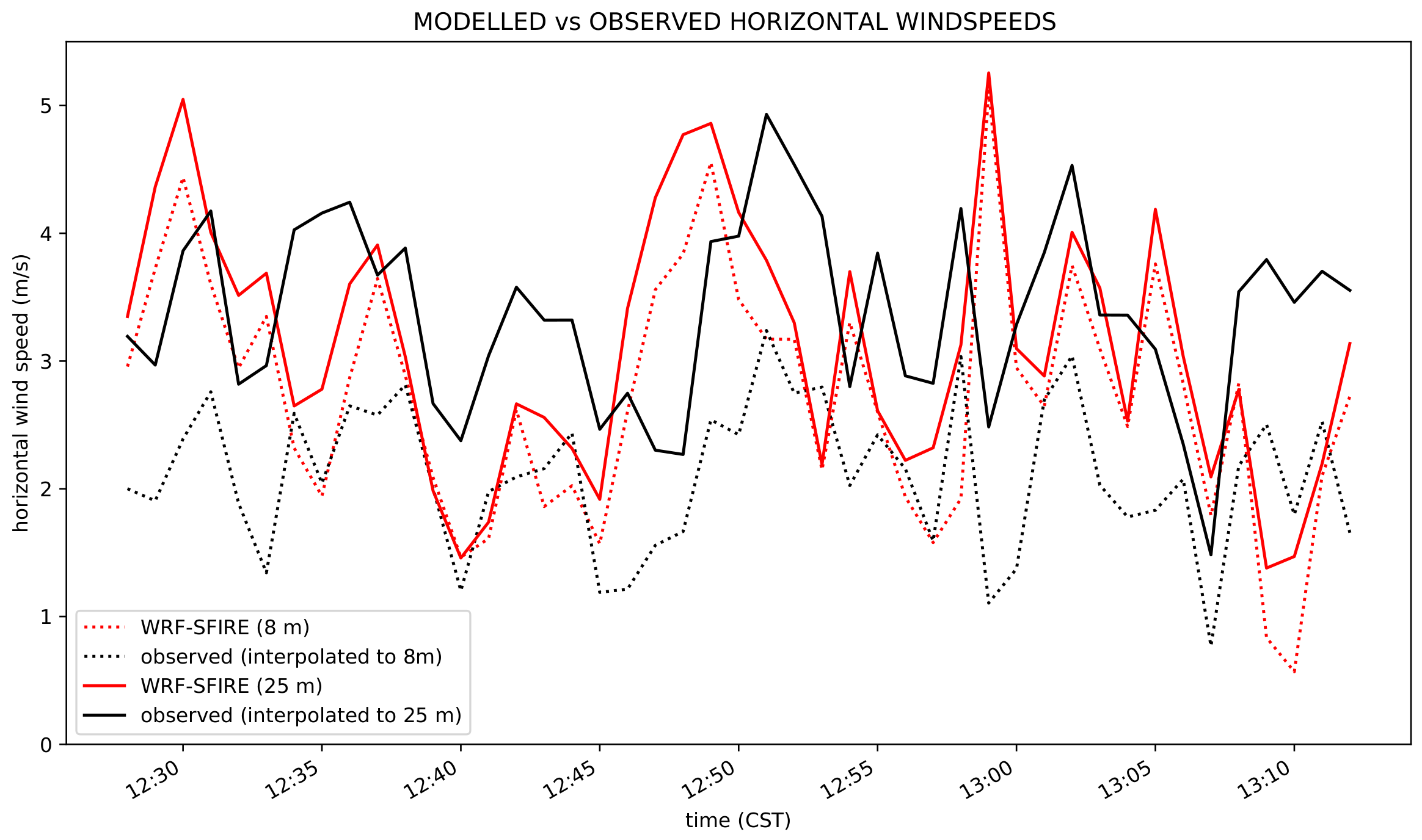
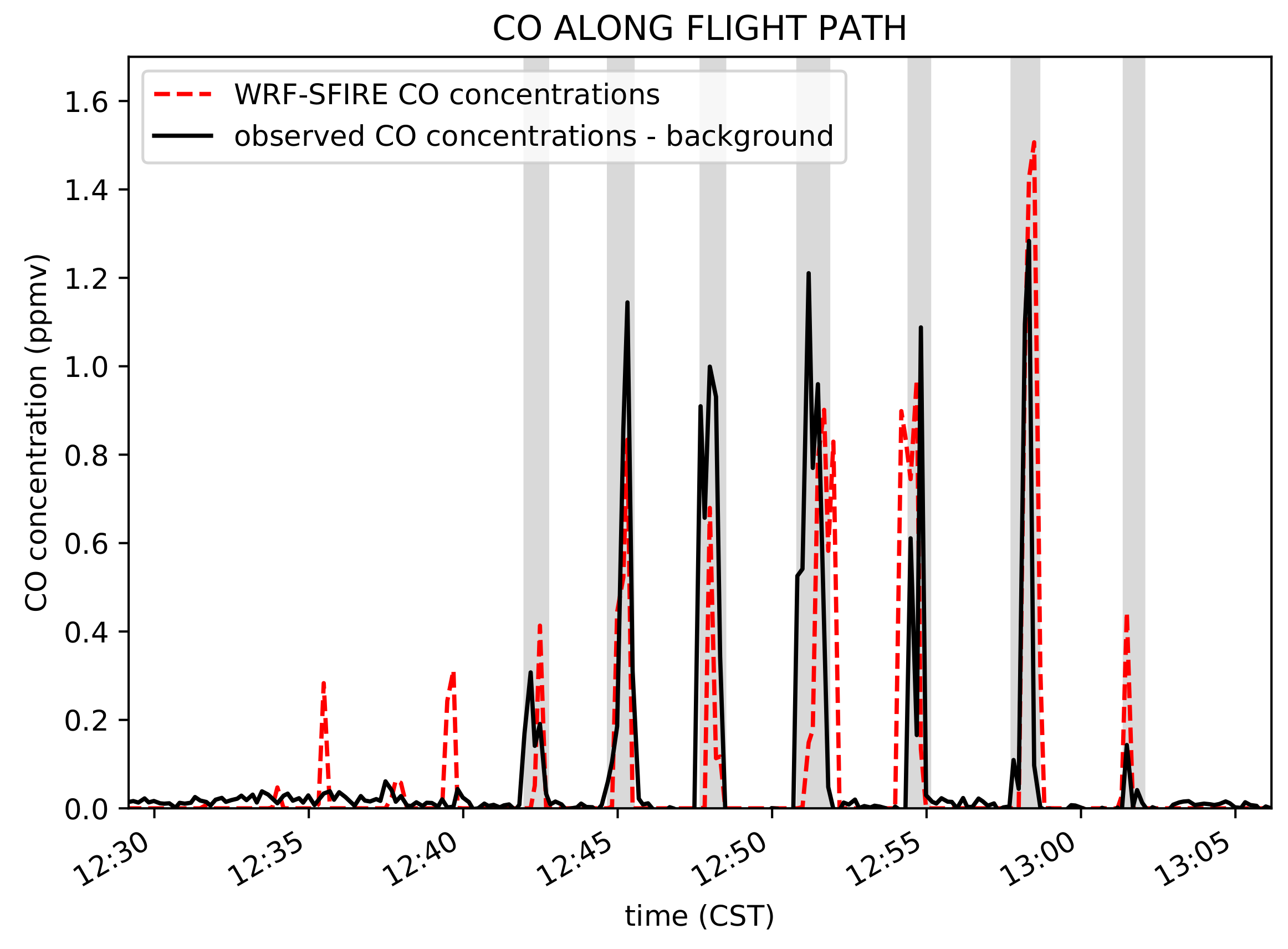
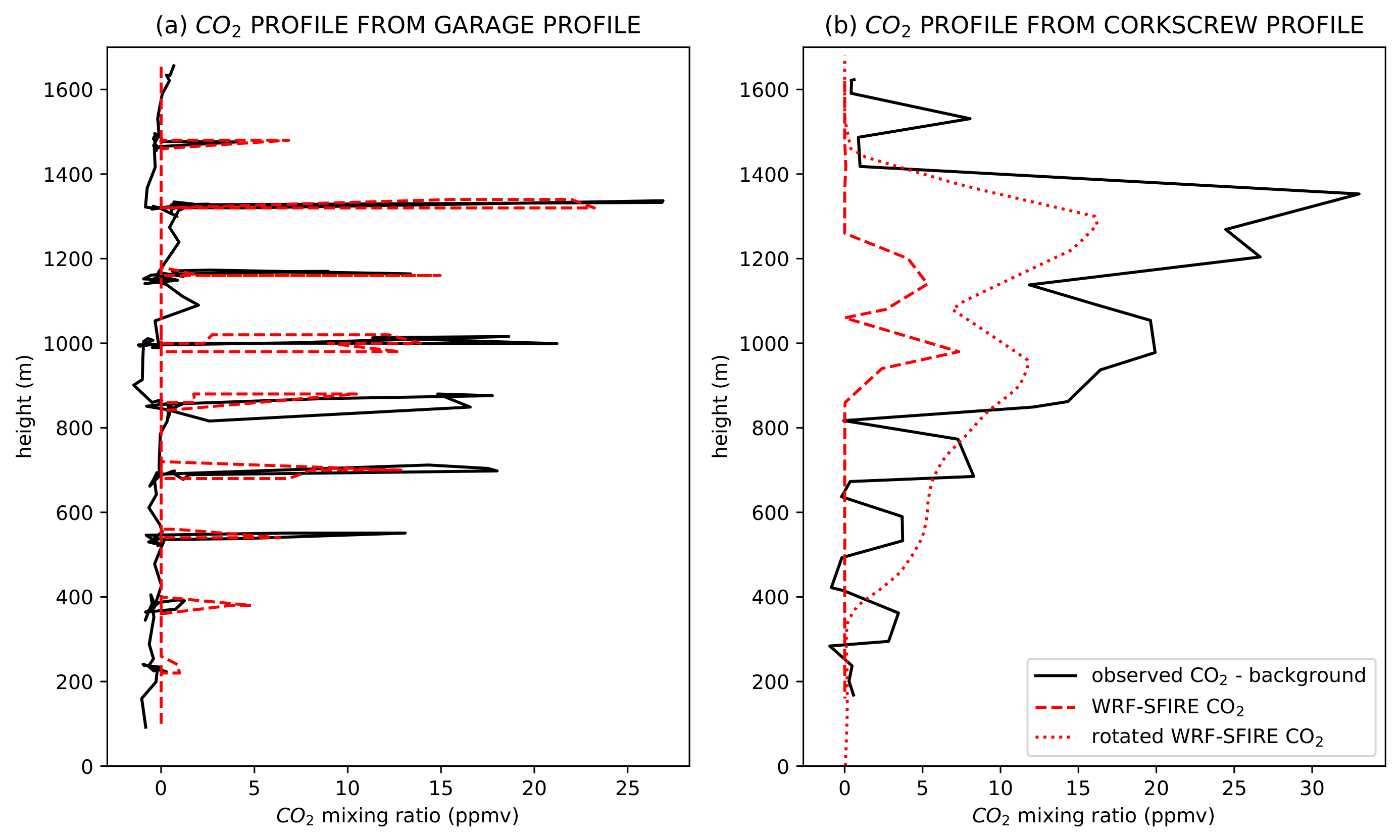
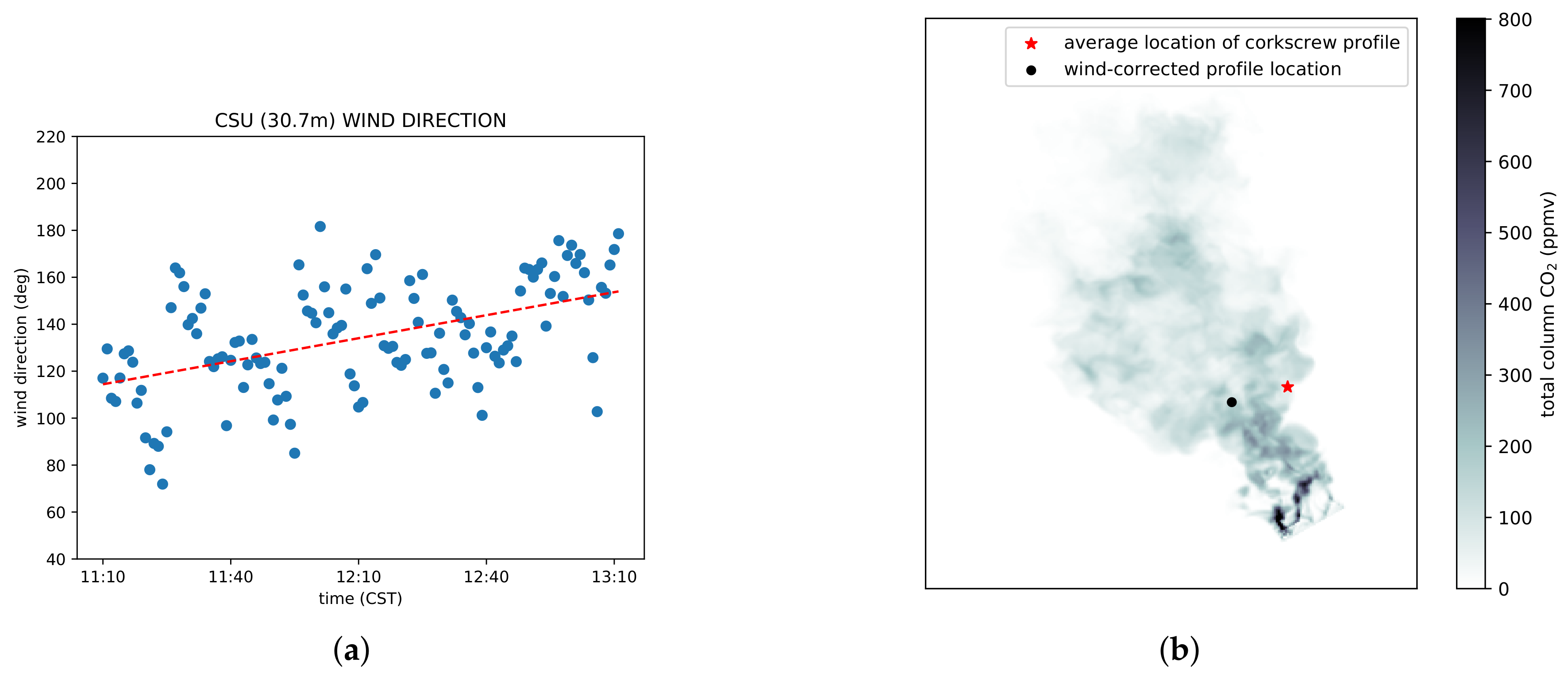
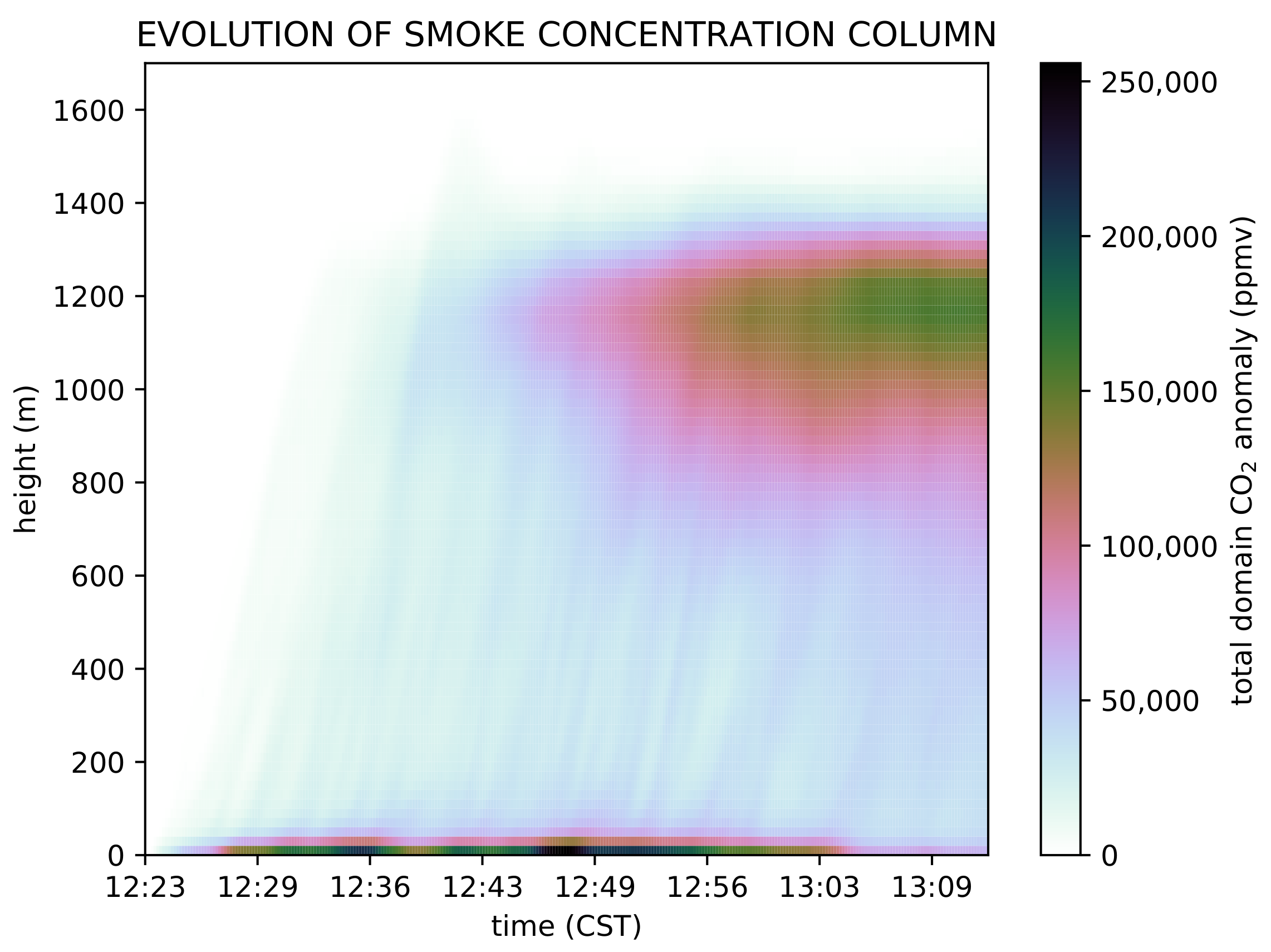
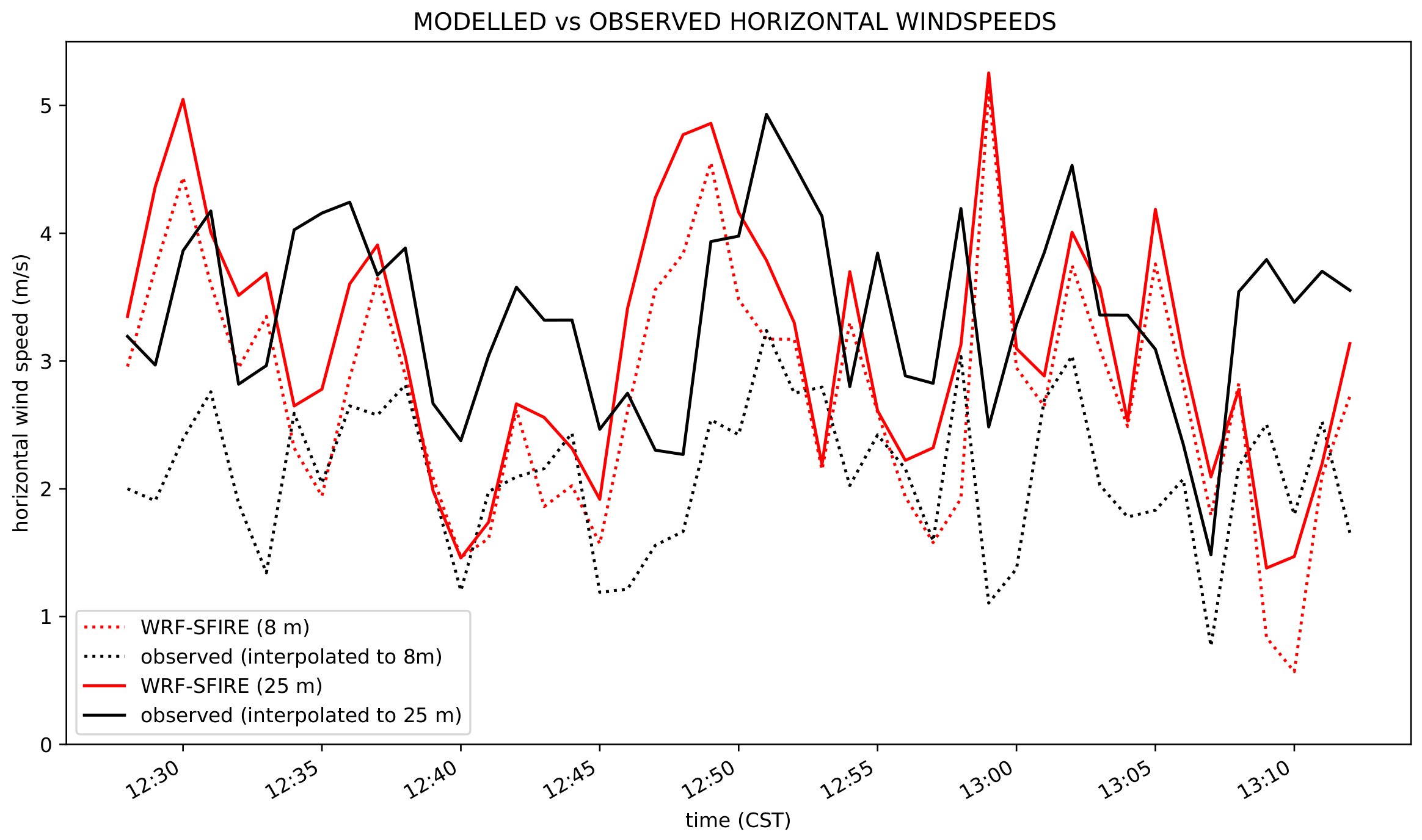
3.2. Plume Dynamics
4. Discussion
4.1. Vertical Plume Rise in the Boundary Layer
4.2. Importance of Fire Input Parameters
4.3. ROS and Biases in Modeled Emissions
4.4. Experimental Design Considerations
4.5. Limitations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Coen, J.L.; Cameron, M.; Michalakes, J.; Patton, E.G.; Riggan, P.J.; Yedinak, K.M. WRF-Fire: Coupled Weather—Wildland Fire Modeling with the Weather Research and Forecasting Model. J. Appl. Meteorol. Climatol. 2012, 52, 16–38. [Google Scholar] [CrossRef]
- Mandel, J.; Beezley, J.D.; Kochanski, A.K. Coupled atmosphere-wildland fire modeling with WRF 3.3 and SFIRE 2011. Geosci. Model Dev. 2011, 4, 591–610. [Google Scholar] [CrossRef] [Green Version]
- Mandel, J.; Amram, S.; Beezley, J.; Kelman, G.; Kochanski, A.; Kondratenko, V.; Lynn, B.; Regev, B.; Vejmelka, M. Recent advances and applications of WRF–SFIRE. Nat. Hazards Earth Syst. Sci. 2014, 14, 2829–2845. [Google Scholar] [CrossRef]
- Kochanski, A.K.; Jenkins, M.A.; Mandel, J.; Beezley, J.D.; Clements, C.B.; Krueger, S. Evaluation of WRF-SFIRE performance with field observations from the FireFlux experiment. Geosci. Model Dev. 2013, 6, 1109–1126. [Google Scholar] [CrossRef] [Green Version]
- Kochanski, A.; Jenkins, M.; Mandel, J.; Beezley, J.; Krueger, S. Real time simulation of 2007 Santa Ana fires. For. Ecol. Manag. 2013, 294, 136–149. [Google Scholar] [CrossRef] [Green Version]
- Kochanski, A.K.; Jenkins, M.A.; Yedinak, K.; Mandel, J.; Beezley, J.; Lamb, B. Toward an integrated system for fire, smoke and air quality simulations. Int. J. Wildland Fire 2016, 25, 534–546. [Google Scholar] [CrossRef] [Green Version]
- Mallia, D.; Kochanski, A.; Urbanski, S.; Lin, J. Optimizing smoke and plume rise modeling approaches at local scales. Atmosphere 2018, 9, 166. [Google Scholar] [CrossRef]
- Ottmar, R.D.; Hiers, J.K.; Butler, B.W.; Clements, C.B.; Dickinson, M.B.; Hudak, A.T.; O’Brien, J.J.; Potter, B.E.; Rowell, E.M.; Strand, T.M.; et al. Measurements, datasets and preliminary results from the RxCADRE project—2008, 2011 and 2012. Int. J. Wildland Fire 2016, 25, 1–9. [Google Scholar] [CrossRef]
- Clements, C.B.; Lareau, N.P.; Seto, D.; Contezac, J.; Davis, B.; Teske, C.; Zajkowski, T.J.; Hudak, A.T.; Bright, B.C.; Dickinson, M.B.; et al. Fire weather conditions and fire–atmosphere interactions observed during low-intensity prescribed fires–RxCADRE 2012. Int. J. Wildland Fire 2016, 25, 90–101. [Google Scholar] [CrossRef]
- Butler, B.; Teske, C.; Jimenez, D.; O’Brien, J.; Sopko, P.; Wold, C.; Vosburgh, M.; Hornsby, B.; Loudermilk, E. Observations of energy transport and rate of spreads from low-intensity fires in longleaf pine habitat–RxCADRE 2012. Int. J. Wildland Fire 2016, 25, 76–89. [Google Scholar] [CrossRef]
- Hudak, A.T.; Bright, B.C. RxCADRE 2008, 2011, and 2012: Burn Blocks. 2014. Available online: https://doi.org/10.2737/RDS-2014-0031 (accessed on 16 July 2019).
- Hudak, A.T.; Bright, B.C.; Kremens, R.L.; Dickinson, M.B. RxCADRE 2011 and 2012: Wildfire Airborne Sensor Program Long Wave Infrared Calibrated Image Mosaics. 2015. Available online: https://doi.org/10.2737/RDS-2016-0008 (accessed on 16 July 2019).
- Seto, D.; Clements, C.B. RxCADRE 2012: CSU-MAPS Wind LiDAR Velocity and Microwave Temperature/Relative Humidity Profiler Data. 2015. Available online: https://doi.org/10.2737/RDS-2015-0026 (accessed on 16 July 2019).
- Seto, D.; Clements, C.B. RxCADRE 2012: In-Situ Wind, Air Temperature, Barometric Pressure, and Heat Flux Time Series Data. 2015. Available online: https://doi.org/10.2737/RDS-2015-0048 (accessed on 16 July 2019).
- Hudak, A.T.; Bright, B.C.; Williams, B.W.; Hiers, J.K. RxCADRE 2011 and 2012: Ignition Data. 2017. Available online: https://doi.org/10.2737/RDS-2017-0065 (accessed on 16 July 2019).
- Ottmar, R.D.; Restaino, J.C. RxCADRE 2008, 2011, and 2012: Ground Fuel Measurements from Prescribed Fires. 2014. Available online: https://doi.org/10.2737/RDS-2014-0028 (accessed on 16 July 2019).
- Urbanski, S.P. RxCADRE 2012: Airborne Measurements of Smoke Emission and Dispersion from Prescribed Fires. 2014. Available online: https://doi.org/10.2737/RDS-2014-0015 (accessed on 16 July 2019).
- Kartsios, S.; Karacostas, T.; Pytharoulis, I.; Dimitrakopoulos, A. Coupled Weather-Wildland Fire Model for fire behavior interpretation. In Proceedings of the 12th International Conference on Meteorology, Climatology and Atmospheric Physics, Heraklion, Greece, 28–31 May 2014. [Google Scholar]
- Anderson, H.E. Aids to Determining Fuel Models for Estimating Fire Behavior; General Technical Report INT-122; U.S. Department of Agriculture: Washington, DC, USA, 1982; p. 22.
- Overholt, K.; Cabrera, J.; Kurzawski, A.; Koopersmith, M.; Ezekoye, O. Characterization of fuel properties and fire spread rates for little bluestem grass. Fire Technol. 2014, 50, 9–38. [Google Scholar] [CrossRef]
- Prichard, S.; O’Neill, S.; Urbanski, S. Evaluation of Revised Emissions Factors for Emissions Prediction and Smoke Management; United States Environmental Protection Agency: Washington, DC, USA, 2017.
- Val Martin, M.; Kahn, R.; Tosca, M. A Global Analysis of Wildfire Smoke Injection Heights Derived from Space-Based Multi-Angle Imaging. Remote Sens. 2018, 10, 1609. [Google Scholar] [CrossRef]
- Kartsios, S.; Karacostas, T.S.; Pytharoulis, I.; Dimitrakopoulos, A.P. The Role of Heat Extinction Depth Concept to Fire Behavior: An Application to WRF-SFIRE Model. In Perspectives on Atmospheric Sciences; Karacostas, T., Bais, A., Nastos, P.T., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 137–142. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Parameter | Value/Description |
|---|---|
| Model version | 24 May 2019 |
| (git https://github.com/openwfm/wrf-fire/tree/ced5955b23cfa9bc0f937783c1c63ff7aa1bc2fa) | |
| Horizontal grid spacing | 40 m |
| Domain size | 260 grids (east-west) × 350 grids (north-south) |
| Time step | 0.1 s |
| Model top | 3000 m AGL |
| Spinup timing | 10:00:00–12:23:00 CST (CST = UTC − 6 h) |
| Fire (restart) simulation timing | 12:23:00–13:12:00 CST |
| Sub-grid scale closure | 1.5 TKE (TKE = Turbulence kinetic energy) |
| Lateral boundary conditions | periodic |
| Surface physics | Monin–Obukhov similarity (sf_sfclay_physics = 1) |
| Land surface model | thermal diffusion (sf_surface_physics = 1) |
| Surface heat flux | 160 W m (tke_heat_flux = 0.13) |
| Simulation Parameter | Value |
|---|---|
| Fire mesh refinement | 10 |
| Ignition duration | 12:23–12:36 CST (varied for each fire line) |
| Rate of spread during ignition | 0.2 m s |
| Fuel category | 1 (short grass) |
| Surface dead fuel moisture | 8.46% |
| Heat of combustion of dry fuel | 16.4 × 107 J kg |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moisseeva, N.; Stull, R. Capturing Plume Rise and Dispersion with a Coupled Large-Eddy Simulation: Case Study of a Prescribed Burn. Atmosphere 2019, 10, 579. https://doi.org/10.3390/atmos10100579
Moisseeva N, Stull R. Capturing Plume Rise and Dispersion with a Coupled Large-Eddy Simulation: Case Study of a Prescribed Burn. Atmosphere. 2019; 10(10):579. https://doi.org/10.3390/atmos10100579
Chicago/Turabian StyleMoisseeva, Nadya, and Roland Stull. 2019. "Capturing Plume Rise and Dispersion with a Coupled Large-Eddy Simulation: Case Study of a Prescribed Burn" Atmosphere 10, no. 10: 579. https://doi.org/10.3390/atmos10100579
APA StyleMoisseeva, N., & Stull, R. (2019). Capturing Plume Rise and Dispersion with a Coupled Large-Eddy Simulation: Case Study of a Prescribed Burn. Atmosphere, 10(10), 579. https://doi.org/10.3390/atmos10100579