Abstract
To improve the mechanized transplanting efficiency for large-scale broccoli production in Ningxia, this study aims to identify key morphological traits of seedlings suitable for mechanized transplanting. A Box–Behnken design was used to set three experimental factors, broccoli variety, seedling age, and plug tray specification, to evaluate their effects on seedling plant type (plant height, stem diameter, canopy diameter, stem inclination angle, and plant type cone angle) and root system characteristics (substrate loss rate). The results showed that plug tray specification was the primary factor affecting substrate loss rate, followed by variety and seedling age. Seedling age was the dominant factor affecting plant height, stem diameter, and canopy diameter, while plug tray specification primarily influenced stem inclination angle. Optimization via response surface methodology (RSM) indicated that the best transplanting performance was achieved with the “Hannai Youxiu” variety (excellent cold tolerance), 30-day-old seedlings, and 72-cell or 98-cell plug trays. Field validation confirmed that under these optimal parameters the mechanized transplanting feeding rate reached 100%, the seedling missing rate was 2.5%, and the transplanting qualification rate was 97.5%, with all RMSE values being less than 7.5%. These findings provide a scientific basis for the mechanized transplanting of broccoli in Ningxia, recommending the “Hannai Youxiu” variety and 98-cell plug trays with 30-day-old seedlings to enhance transplanting quality and production efficiency.
1. Introduction
As an important vegetable in the Brassicaceae family, broccoli (Brassica oleracea var. italica) is rich in vitamins, minerals, dietary fiber, and bioactive substances with antioxidant and anticancer properties, thus possessing high nutritional and functional value [1]. Fueled by the escalating global demand for nutritious foods, broccoli cultivation and consumption have been consistently increasing across the globe. In China, it has emerged as a dominant crop in protected horticulture, and the advancement of its industrial chain is crucial for ensuring vegetable supply stability and driving regional economic growth [2].
Mechanization represents a pivotal strategy for enhancing quality, boosting efficiency, and enabling large-scale cultivation in modern agriculture. However, the mechanization level in vegetable production lags significantly behind that of food crops, with particularly critical bottlenecks evident in the seedling raising and transplanting stages [3]. Broccoli is mostly cultivated via the plug tray system. Manual transplanting is characterized by high labor intensity, low efficiency, and high costs, making it increasingly unable to meet the needs of modern agriculture. Therefore, the promotion of mechanized transplanting technology has become the key to improving production efficiency and market competitiveness. Although progress has been made in vegetable mechanization in China, the lack of compatibility between broccoli seedlings and transplanting machinery remains unresolved. The success of mechanized transplanting not only depends on equipment performance but, more importantly, requires adaptable seedlings to be provided through the seedling-raising process [4]. An ideal seedling should have a moderate plant height and stem diameter, an intact root ball, a low substrate loss rate, and good plant type compactness to ensure smooth mechanical operation and seedling establishment after transplanting. However, in practical production, discrepancies in factors such as variety, seedling age, and plug tray size cause substantial variations in seedling architecture, thereby giving rise to problems such as unstable gripping and seedling missing and lodging [5]. These issues reduce transplanting efficiency and seedling survival rates while constraining improvements in mechanization levels.
Internationally, some research has been conducted on mechanized seedling raising and vegetable transplanting. Researchers in Europe and Japan have explored adaptability indicators for crops such as tomatoes and cabbage [6], while Chinese scholars have conducted relevant research on cruciferous vegetables, including cauliflower [7]. However, most existing studies focus on a single factor, leading to a lack of studies on the comprehensive optimization of multiple factors. Applications in the broccoli field are limited, and the quantitative relationships between seedling age, plug tray size, and mechanized transplanting adaptability have not yet been clarified [8]. Notably, even within the research focused on mechanized vegetable seedling production, applications of response surface methodology (RSM) for multi-factor optimization remain limited. For example, Magar et al. employed RSM to optimize substrate formulations and paper pot volumes for tomato and pepper seedlings, achieving joint optimization of multiple factors (substrate composition and container volume). However, they did not incorporate interactions involving variety specificity or seedling age [9]. Similarly, Ceglie et al. applied RSM to optimize organic substrate formulations and examined how different amendments affected the growth of tomato, melon, and lettuce seedlings, yet they did not quantitatively evaluate tray cell size or seedling age [10]. In addition, in their development of automated transplanting equipment for vegetables, Han et al. emphasized the importance of multi-factor co-regulation in improving the efficiency of mechanized seedling production and transplanting. However, their study did not employ response surface methodology to quantitatively optimize these factors [11]. Consequently, in crops such as broccoli, there remains a clear gap in RSM-driven optimization studies addressing the interactions among variety, seedling age, and tray specifications—an omission that constrains the development of precise and mechanized seedling-raising strategies. A key region for protected agriculture in China, Ningxia has abundant sunlight and large diurnal temperature variations, making it suitable for large-scale broccoli cultivation [12]. However, local seedling producers still mainly rely on manual labor, resulting in a low production efficiency and high costs, in sharp contradiction to the goals of high efficiency and standardization in protected agriculture.
Therefore, under the specific agricultural production conditions of Ningxia, identifying the morphological traits of broccoli seedlings suitable for mechanized transplanting holds significant theoretical and practical value. The Box–Behnken design (BBD) and response surface regression models have been widely applied in agricultural engineering and related disciplines to analyze multi-factor interactions and predict optimal parameter combinations. Previous studies have utilized these methods to optimize rapeseed oil pressing parameters, enabling efficient prediction and optimization of yield and energy consumption under multivariable conditions [13]. Applying these statistical optimization tools to mechanized broccoli seedling production and transplanting can therefore provide a quantitative foundation for developing targeted and efficient cultivation strategies.
This study focuses on broccoli cultivation in Ningxia, analyzing the effects of variety, seedling age, and plug tray size on indicators such as the substrate loss rate, plant height, and stem diameter. It also establishes a response regression model using a BBD and optimizes/verifies the optimal parameters. The specific objectives of this study are to (1) identify key seedling morphological indicators suitable for mechanized transplanting; (2) construct and verify a multi-factor regression model and explore the optimal combination of variety, seedling age, and plug tray size; (3) propose optimized seedling-raising parameters suitable for protected agriculture in Ningxia. To achieve the above objectives and clarify the core research assumptions, the following testable hypotheses are proposed: (1) Specific combinations of variety, seedling age, and plug tray size will synergistically regulate broccoli seedling morphological parameters (e.g., stem diameter, substrate loss rate, and plant type cone angle) and achieve optimal adaptability to mechanized transplanting. (2) Integrating response surface methodology (RSM) with a Box–Behnken design (BBD) can effectively lead to quantification of the interactive effects of the three factors and accurately predict the optimal parameter combination for high transplanting qualification rates. (3) This study is of great significance for improving the mechanization of broccoli production in Ningxia and promoting the standardized production of cruciferous vegetables.
2. Materials and Methods
To clarify the overall research framework, an experimental design flow diagram is presented in Figure 1, which systematically outlines the entire process from research objective formulation to experimental design, indicator determination, model construction, parameter optimization, and field validation. This diagram enables readers to quickly grasp the logical connections between each research component.
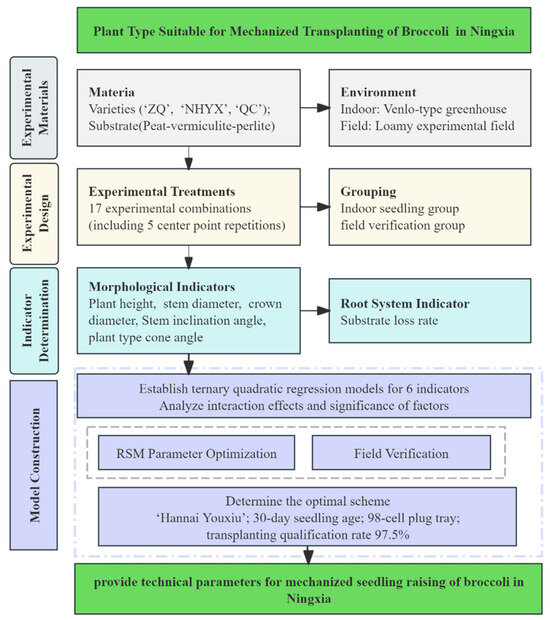
Figure 1.
Experimental design flow diagram of this study.
2.1. Experimental Materials
The experiment was conducted from 5 May to 15 June 2025, at the Huwa Vegetable Base in Touying Town, Guyuan City, Ningxia (36°03′ N, 106°23′ E, elevation 1835.5 m). Although the experiment lasted for 40 days, this duration aligns with the typical spring seedling-raising cycle in Ningxia and is sufficient to capture changes in seedling morphological traits, particularly in terms of adaptability for mechanized transplanting. The climatic conditions (average temperature of 15.5–18.9 °C, cumulative solar radiation of 669.77–747.26 MJ·m−2) were consistent with the long-term (2020–2024) average for the region. Therefore, this experimental period is suitable for evaluating the morphological characteristics of broccoli seedlings for mechanized transplanting. However, future studies will consider extending the experimental period to further assess the impact of climatic variations on seedling morphological consistency. To ensure the reliability of the seedling morphological data within this period, the observation frequency was increased: seedling indicators (plant height, stem diameter, and substrate loss rate) were measured every 5 days, with 3 biological replicates at each observation point (1 tray per replicate), and 10 seedlings were sampled per replicate. All measurements were conducted under the same greenhouse environmental conditions to minimize intra-cycle variability.
The broccoli varieties used for transplanting were “Zhongqing”, “Hannai Youxiu”, and “Qingcheng”, which were all sourced from Zhejiang Wuwangnong Seed Industry Co., Ltd, Hangzhou, Zhejiang Province, China. The seedling substrate, which was purchased from Lin’an Jinda Green Industry Technology Co., Ltd., Hangzhou (Lin’an District), Zhejiang Province, China, was a peat–vermiculite–perlite mixture (volume ratio of 3:1:1) with the following properties: an organic matter content of 35.2% ± 1.8%, total NPK (N + P2O5 + K2O) of 2.8% ± 0.3%, a bulk density of 0.38 g·cm−3 ± 0.02 g·cm−3, an electrical conductivity (EC) of 1.3 mS·cm−1 ± 0.1 mS·cm−1, and a pH of 5.8 ± 0.2. Seedling plug trays were purchased from Taizhou Longji Plastic Industry Co., Ltd., Taizhou, Zhejiang Province, China, with uniform external dimensions of 540 mm × 280 mm × 45 mm (length × width × height); detailed specifications are provided in Table 1. The transplanter used was the 2ZB-2B model from Baoji Dingduo Machinery Co., Ltd., Weibin District, Baoji City, Shaanxi Province, China, with a working speed of 0.8–1.2 m·s−1 and a transplanting depth of 3–5 cm.

Table 1.
Different tray specification parameters.
Seedlings were grown in a Venlo-type greenhouse under the following environmental conditions: 12 h light/12 h dark photoperiod (with supplementary lighting provided by 400 W LED grow lights with a photosynthetic photon flux density of 300 ± 20 μmol·m−2·s−1 when natural light < 200 μmol·m−2·s−1), day/night temperature maintained at 25 ± 2 °C/18 ± 2 °C, and relative humidity controlled at 60–70%. Irrigation was applied via a drip system, with 50–60 mL of water per cell every 2 days to maintain substrate moisture at 60–70% of field capacity. A half-strength Hoagland nutrient solution (N: 100 mg·L−1, P: 30 mg·L−1, K: 80 mg·L−1) was applied weekly from the 10th day after sowing. Pest control was conducted by spraying biological pesticides (Bacillus thuringiensis var. kurstaki, 1000 IU·mg−1) at 7-day intervals to prevent aphid and caterpillar infestations.
2.2. Experimental Design
In this experiment, three factors were set: variety (categorical: “Zhongqing”, “Hannai Youxiu”, and “Qingcheng”), seedling age (quantitative: 30, 35, and 40 days), and plug tray specification (quantitative: 72, 98, and 128 cells; commercial trays with no artificial adjustment to cell number). To address the inappropriateness of the Box–Behnken design (BBD) for mixed factors (quantitative + categorical), a modified BBD with dummy variable coding was adopted: varieties were coded as dummy variables (0 = “Zhongqing”, 1 = “Hannai Youxiu”, and 2 = “Qingcheng”) and treated as discrete factors in Design-Expert 13 software, while seedling age and plug tray specification were treated as continuous variables.
Each experimental run included three biological replicates per experimental point, ensuring reliable statistical analysis. A total of 51 trays were used, with 17 experimental runs, including 5 center points. To control spatial variability (e.g., tray position, light gradient), the experiment followed a completely randomized block design (CRBD), with trays randomly assigned within the greenhouse and blocks defined by light intensity gradients (Table 2).
Table 2.
Test factor codes.
2.3. Determination of Indicators
2.3.1. Plant Type Indexes
Plant height: Measured with a digital vernier caliper (precision: 0.01 mm) from the substrate surface to the highest point of the plant. Stem diameter: Measured with a digital vernier caliper (precision: 0.01 mm) at 1 cm above the substrate surface, averaged from 3 perpendicular measurements per seedling. Canopy diameter: Measured with a ruler (precision: 0.1 mm) as the maximum width of fully expanded leaves, with 2 perpendicular measurements per seedling averaged [14,15,16].
Stem inclination angle: Defined as the angle between the stem (1 cm above the substrate) and the horizontal plane, measured with a digital protractor (model: SH-80, manufactured by Shanghai Measuring & Cutting Tool Works Co., Ltd., Shanghai, China, precision: 0.1°) by aligning the base with the stem axis [17]. The plant type cone angle was measured using a digital protractor (model: SH-80, precision: 0.1°). The angle was defined as the acute angle formed by lines connecting the two widest points of the plant canopy to a fixed point at the root–stem junction. The measurement distance was standardized at 5 cm from the fixed point [16].
The substrate loss rate was calculated by measuring the mass of the substrate before and after gently tapping off loose particles from the root ball. The initial mass (W1) was recorded immediately after removal from the plug tray, and the mass (W2) was measured after simulating transplanting vibration. The formula used is: Substrate Loss Rate = [(W1 − W2)/W1] × 100% [16].
All morphological measurements (plant height, stem diameter, canopy diameter, stem inclination angle, and plant type cone angle) were conducted with calibrated instruments. Daily calibration was performed using standard references (e.g., vernier caliper with a 50 mm standard block). Experimental error was minimized by taking three technical replicates per seedling for accuracy.
2.3.2. Root Mean Square Error (RMSE)
In the formula, RMSE is the root mean square error; the smaller the RMSE value, the better the consistency between the predicted value and the measured value; Pi is the predicted value; Qi is the measured value; n is the number of samples.
2.4. Data Statistics and Analysis
To standardize unit presentation, all length-related parameters were converted to millimeters (mm), and volume was converted to cubic centimeters (cm3). All measurements were repeated 10 times, and Microsoft Excel (Office 2019) software was used for data organization. Statistical analysis was performed using SPSS 26.0 software, response surface analysis was conducted with Design-Expert 13, and graphs were plotted using Origin 2021.
3. Regression Analysis Results
3.1. Establishment of Regression Model
Response surface methodology (RSM) is based on orthogonal experiments. It allows for simulations by taking the response value as the dependent variable of the function, intuitively demonstrates the effects of various factors on the response value through graphs, and solves the mathematical model to finally obtain the optimal conditions [18]. Based on the aforementioned range of experimental conditions and results, multivariate fitting and regression analysis were performed using RSM modeling software (Design Expert 13) to further explore the relationships and influences among various factors. The analysis revealed the response regression equations relating to the broccoli variety, seedling age, and plug tray specification, which are shown in Equations (1)–(6) as follows:
As shown in Table 3, variance and ternary quadratic regression analyses were performed on each index of the plant type and morphological characteristics of the broccoli seedlings using Design-Expert 8.0.6 software to further evaluate the accuracy of model fitting, as well as the degree of influence of each factor on the suitability of broccoli seedlings for mechanized transplanting and the order of their importance. In the table, A, B, and C represent the coded values of the broccoli variety, seedling age, and plug tray specification, respectively.
Table 3.
Morphological characteristics of plant type suitable for mechanized transplanting: Box–Behnken experimental design and results.
3.2. Regression Analysis
To further assess the feasibility and predictive accuracy of the RSM model, an analysis of variance (ANOVA) was performed on all model outputs, and detailed results are presented in Table 4, Table 5 and Table 6. Overall, the RSM models for all response variables were highly significant (p < 0.001) and exhibited strong goodness-of-fit, as indicated by non-significant lack-of-fit terms (p > 0.05). These results demonstrate clear and biologically interpretable regulatory patterns among the experimental factors.
Table 4.
Analysis of variance (ANOVA) of substrate loss rate and plant height.
Table 5.
Analysis of variance (ANOVA) of stem and canopy diameters.
Table 6.
Analysis of variance (ANOVA) of stem inclination angle and plant type cone angle.
Seedling age (B) was the dominant factor driving variations in plant height (Y2), stem diameter (Y3), canopy diameter (Y4), and the plant type cone angle (Y6) (F = 109.84–487.04, p < 0.001). Its effect on stem diameter was particularly pronounced, underscoring the central role of ontogenetic development in shaping aboveground seedling morphology. Plug tray specification (C) exerted the strongest influence on the substrate loss rate (Y1, F = 42.69, p < 0.001) and stem inclination angle (Y5, F = 133.43, p < 0.001), reflecting the spatial confinement imposed by cell size on root anchorage and seedling erectness.
The predictive performance of the models was further confirmed by high predicted R2 values (0.8236–0.9768). The adjusted R2 values (0.9529–0.9835) demonstrated that the models explained more than 95% of the total variation in the response variables, validating their robustness and suitability for subsequent parameter optimization.
3.2.1. Results of Variance Analysis of Substrate Scattering Rate and Plant Height Models
The results of the variance analysis of the effects of three factors on the substrate loss rate (Y1) and plant height (Y2) are shown in Table 4.
As can be seen in Table 4, the p-values of the Y1 and Y2 regression models are both less than 0.001, indicating that both models are extremely significant. The p-values of the lack-of-fit terms are 0.1349 and 0.7551, respectively, with both p-values being greater than 0.05. This indicates that the lack-of-fit terms are not significant, suggesting good model fit and that the regression equations can reliably substitute for actual data points in analyzing the experimental results. The p-value can also be used as a tool to indicate the significance of each studied factor and its interactions [19]. In the Y1 model, the p-values of the linear terms A and C are all less than 0.001, indicating that A and C have extremely significant effects on the substrate loss rate. The quadratic terms A2 and C2 are significant, while the other quadratic terms are not significant. In the Y2 model, the p-values of all linear terms are less than 0.05, indicating that factors A, B, and C all have a significant impact on the fresh weight of the root clod. The p-value of the interaction term BC is less than 0.05, while the p-values of the other interaction terms are all greater than 0.05. For the quadratic terms of the factors, the p-value of C2 is less than 0.05, and the p-values of A2 and B2 are both less than 0.001; that is, all quadratic terms are significant.
R2 represents the fitting quality of a polynomial model. The larger the multiple correlation coefficient R2, the better the correlation. For a model with good fitting, the correlation coefficient should be no less than 0.8 [20]. The correlation coefficients (R2) of the Y1 and Y2 models are 0.9854 and 0.9828, respectively, and the adjusted R2 values are 0.9665 and 0.9608, respectively, which indicates that both the Y1 and Y2 models have high reliability and significance.
To further verify the reliability and fitting performance of the models, the actual values obtained from the experiments and presented in the table were fitted with the model-predicted values, and the results are shown in Figure 2.
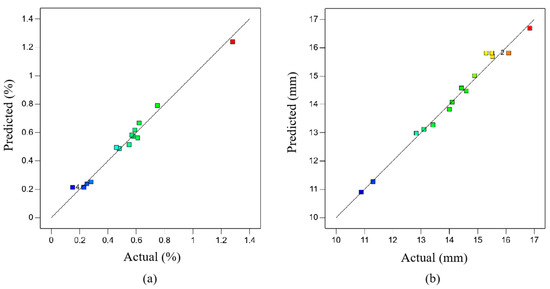
Figure 2.
Comparison between predicted values and actual values of substrate loss rate Y1 (a) and plant height Y2 (b).
3.2.2. Variance Analysis of Stem Diameter and Canopy Diameter Models
The results of the variance analysis for Y3 (stem diameter) and Y4 (canopy diameter) regression models are presented in Table 5. Both models have good fit indices, as indicated by p-values less than 0.0001 for both Y3 and Y4 models. The p-values for the lack-of-fit terms are 0.9108 (Y3) and 0.5099 (Y4), indicating that the lack-of-fit terms are not significant and both models provide a good fit. Therefore, the regression models for Y3 and Y4 are reliable for interpreting the effects of experimental factors on stem diameter and canopy diameter.
For the Y3 model, the linear effects of variety (A), seedling age (B), and plug tray specification (C) were all significant (p < 0.05), indicating that each factor exerted a measurable influence on stem diameter. Among the interaction and quadratic terms, AB (variety × seedling age), BC (seedling age × plug tray specification), A2, and C2 were significant (p < 0.05), whereas the remaining terms were non-significant. For the Y4 model, linear terms B and C significantly affected canopy diameter (p < 0.05). The interaction terms AC (variety × plug tray specification) and BC (seedling age × plug tray specification) were significant (p < 0.05), while AB showed no significant effect. In the quadratic term, A2 and C2 had significant effects on canopy diameter (p < 0.05), and B2 had no significant effect on canopy diameter. The determination coefficients further indicated excellent model performance: the Y3 model achieved an R2 of 0.9928 and an adjusted R2 (R2adj) of 0.9835; the Y4 model had an R2 of 0.9794 and an R2adj of 0.9529. Thus, the two models explained 98.35% and 95.29% of the total variation in stem diameter and canopy diameter, respectively, demonstrating their suitability for factor effect interpretation and the reliable prediction of these morphological traits.
Scatter plot 2 was drawn with the predicted values of stem diameter (Y3) and canopy diameter (Y4) as the ordinate (y-axis) and the experimental values as the abscissa (x-axis). It can be seen that most of the data points are evenly scattered around the line y = x. This indicates that the predicted values of the response surface models for stem diameter and canopy diameter align with the actual experimental values (Figure 3).
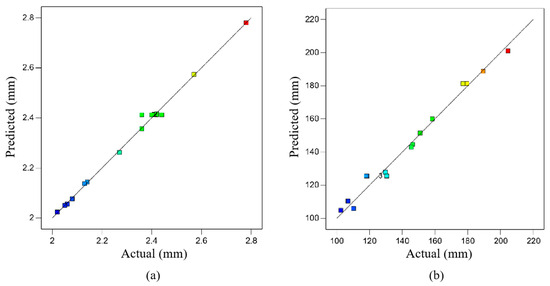
Figure 3.
Relationship between predicted and actual values of stem diameter Y3 (a) and canopy diameter Y4 (b).
3.2.3. Analysis of Variance of Stem Inclination Angle and Plant Type Cone Angle Models
The analysis of variance (ANOVA) results for the effects of three factors on the stem inclination angle (Y5) and plant type cone angle (Y6) are presented in Table 6.
When evaluating the overall performance of the models based on Table 6, it is found that the p-value of the Y5 regression model is less than 0.0001, and the p-value of the Y6 regression model is also less than 0.0001. The lack-of-fit terms have values of p = 0.4073 and 0.6039 (>0.05). This indicates that they are not significant and that the models are reasonable. In the Y5 model, the linear terms A and C have a value of p < 0.01; that is, factors A and C have a significant effect on the stem inclination angle. Both the AB and BC interaction terms are significant (<0.05). The quadratic terms A2 and B2 are significant terms, while the other quadratic terms are not significant. In the Y6 model, the p-values of the linear terms A and B are both less than 0.05; that is, factors A and B have a significant effect on the plant type cone angle. The p-values of the interaction terms AB and AC are less than 0.05; thus, AB and AC are significant terms. The p-value of the quadratic term C2 is less than 0.05; therefore, C2 is significant, and the other quadratic terms are not significant. Y5: R2 = 0.9864, R2pred = 0.8864; Y6: R2 = 0.9763, R2pred = 0.9458. It is shown that both the Y5 and Y6 models have good stability.
A comparison between the predicted values from the regression models and the actual values for the stem inclination angle (Y5) and plant type cone angle (Y6) is shown in Figure 4. The predicted values are close to the actual values, indicating that the fitted functional models have high reliability. Thus, the predicted values of the response surface models for stem inclination angle and plant type cone angle are highly consistent with the actual experimental values.
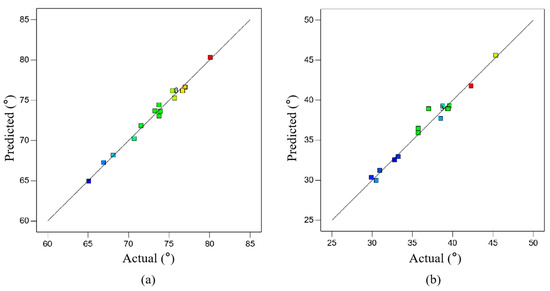
Figure 4.
Relationship between predicted values and actual values of stem inclination angle Y5 (a) and plant type cone angle Y6 (b).
3.3. Analysis of Response Surfaces for the Interaction Effects of Various Factors
3.3.1. Analysis of Substrate Loss Rate
When one of the factors, namely, variety (A), seedling age (B), or plug tray specification (C), is set at the central level, the effect of the interaction between the other two factors on the response value can be represented by contour lines and response surface plots, as shown in Figure 5, Figure 6, Figure 7, Figure 8, Figure 9 and Figure 10. The steeper the response surface, the more significant the effect of the interaction between the independent variables on the response value. Circular contour lines indicate that the interaction between the two factors is not significant, while elliptical contour lines indicate that the interaction between the two factors is significant.
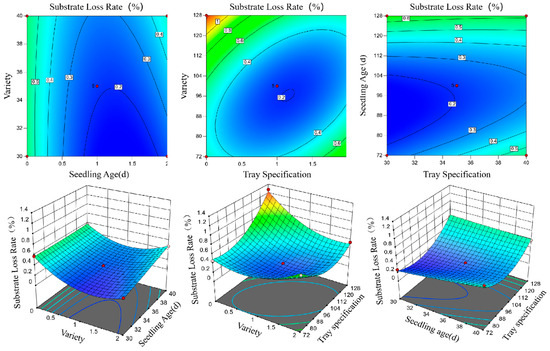
Figure 5.
Effects of interaction between various factors on substrate loss rate.
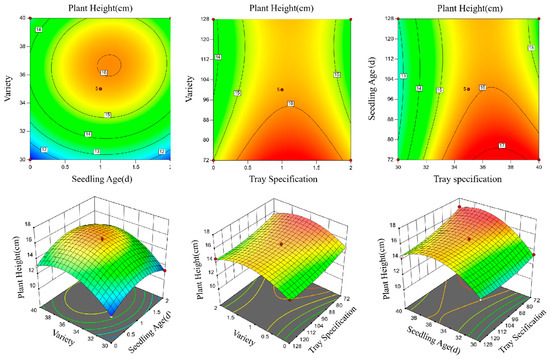
Figure 6.
Impact of the interaction between various factors on plant height.
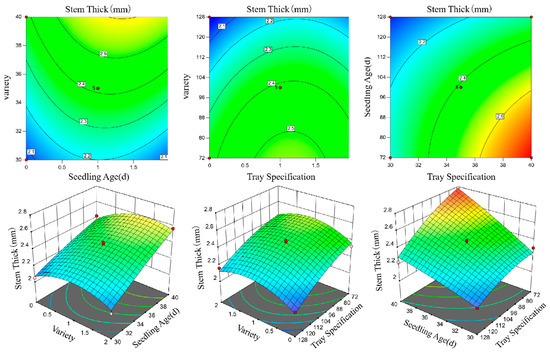
Figure 7.
Influence of the interaction between various factors on stem diameter.
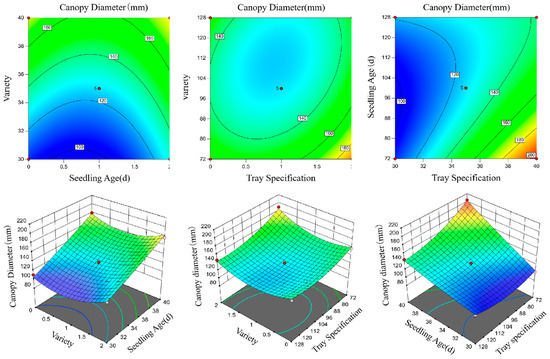
Figure 8.
Influence of the interaction between various factors on canopy diameter.
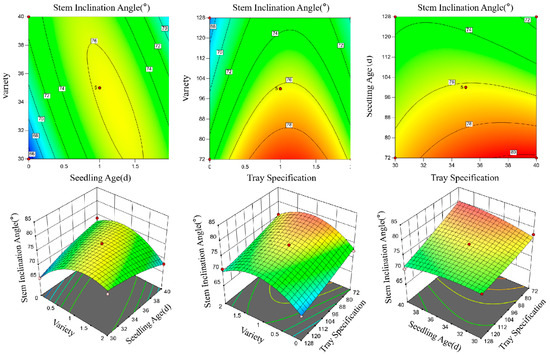
Figure 9.
Influence of the interaction between various factors on the stem inclination angle.
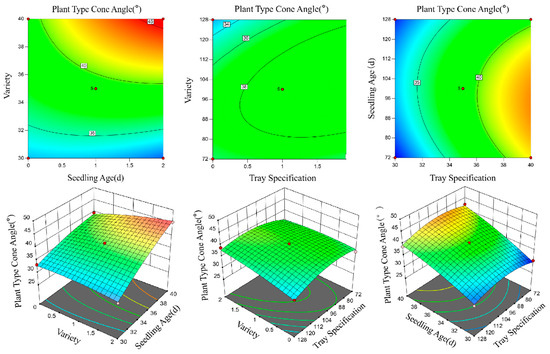
Figure 10.
Influence of the interaction between various factors on the plant type cone angle.
The substrate loss rate (Y1) is a core indicator determining the root integrity of broccoli during mechanical transplanting, and it directly affects the seedling establishment rate and survival rate after seedling planting. It can be seen in Figure 4 that the plug tray specification (C) has the most significant impact on the substrate loss rate (Y1) (F = 42.69, p = 0.0003), followed by variety (A, F = 41.92, p = 0.0003) and seedling age (B, F = 11.79, p = 0.0109). Additionally, the interaction between variety and plug tray specification (AC) has an extremely significant impact on this indicator (F = 100.41, p < 0.0001).
The 72-cell plug tray exhibited the lowest substrate loss rate (0.28% in Experiment No. 17), while the 128-cell plug tray showed the highest substrate loss rate (1.28% in Experiment No. 15). When seedling age and plug tray specification were fixed, the substrate loss rate of “Hannai Youxiu” (Variety 1) was significantly lower than that of “Zhongqing” (Variety 0) and “Qingcheng” (Variety 2). At a seedling age of 40 days, the substrate loss rate of some of the seedlings slightly increased.
3.3.2. Analysis of Plant Height, Stem Diameter, and Canopy Diameter
Plant height (Y2), stem diameter (Y3), and canopy diameter (Y4) jointly determine the “compactness” of seedlings, which directly affects whether they can fit into the seedling-dropping bucket (9.5 cm × 10 cm) of a duckbill transplanter. By analyzing the effect of interactions on plant height (Figure 6), stem diameter (Figure 7), and canopy diameter (Figure 8), it can be concluded that seedling age (B) is the key factor affecting these three indicators: For every 5-day increase in seedling age, the plant height increases by an average of 1.24 mm (the linear term coefficient of B in regression equation Y2 is 1.24), and the quadratic term is significant (p < 0.0001), indicating that plant height shows a trend of “first increasing rapidly and then slowing down” as seedling age increases (Figure 6). Seedling age has an extremely significant effect on stem diameter (F = 487.04, p < 0.0001). At a seedling age of 35 days, the stem diameter reaches its peak (2.78 mm in Experiment No. 1), while at a seedling age of 40 days, the stem diameter slightly decreases due to seedling elongation (Figure 7). For every 5-day increase in seedling age, the canopy diameter increases by an average of 31.62 cm (the linear term coefficient of B in the regression equation Y4 is 31.62). Additionally, there is a significant interaction between seedling age and plug tray specification (BC, F = 22.74, p = 0.0020). Due to sufficient growth space, the 72-cell plug tray shows a significantly greater increase in canopy width with seedling age (an increase of approximately 40 mm from 35 to 40 days) than the 128-cell plug tray (an increase of approximately 20 mm during the same period) (Figure 8).
The effect of plug tray specification (C) on plant type is mainly reflected in the “spatial constraint effect”; due to the high single-cell density of the 128-cell plug tray, seedlings compete for light and nutrients, resulting in a taller plant height (14.6 mm), thinner stem diameter (2.14 mm), and smaller canopy diameter (146.39 cm). In contrast, the 72-cell plug tray exhibits the characteristics of “dwarf and robust, wide canopy” (plant height: 16.84 mm, stem diameter: 2.78 mm, and canopy diameter: 204.6 cm). The effect of variety (A) on plant type is relatively small, but the stem diameter of “Hannai Youxiu” (Variety 1) (2.57 mm) is significantly larger than that of “Zhongqing” (2.41 mm) and “Qingcheng” (2.42 mm). This trait of lodging resistance makes it better suited for the ‘stem toughness’ required in mechanical transplanting.
3.3.3. Analysis of Stem Inclination Angle and Plant Type Cone Angle
The stem inclination angle (Y5) is a core morphological indicator characterizing the erectness of seedlings, with its value directly determining the field planting stability of seedlings after transplanting (Figure 9), and the plant type cone angle (Y6) is a key parameter affecting the qualification rate of seedling bucket-filling: the two (indices) together form a dual-adaptation index system of “planting stability–operation fluency” in the process of mechanical transplanting (Figure 10). The interaction between variety and seedling age (AB) has a significant effect on the plant type cone angle (F = 15.99, p = 0.0052). For “Hannai Youxiu” (Variety 1) at a seedling age of 35 days, the plant type cone angle reaches 39.43° (39.43° in Experiment No. 4), which not only ensures a compact plant structure but also avoids the seedling jamming problem caused by an excessively large cone angle.
3.4. Optimization Results and Verification
3.4.1. Optimization Parameters
The target expectations for the morphological characteristic indicators of broccoli seedlings suitable for mechanical transplanting during the seedling-raising stage are as follows: to minimize the substrate loss rate, plant height, canopy diameter, and plant type cone angle and maximize the stem diameter and stem inclination angle. Based on the fitting model and regression equation, the optimal parameter conditions calculated using RSM were as follows: variety = 1.217, seedling age = 30.246 days, and plug tray specification = 85.999 cells. As variety is a discrete categorical variable (only three commercial varieties were tested: “Zhongqing”, “Hannai Youxiu”, and “Qingcheng”) and plug tray specifications are also commercially discrete products (e.g., an 85.999-cell tray does not exist), the continuously derived optimal values were converted into practical discrete parameters for validation.
Variety: The calculated value of “1.217” is closest to the coded value of “Hannai Youxiu” (coded as 1), so “Hannai Youxiu” was selected.
Seedling age: The calculated value of “30.246 days” was rounded to 30 days (consistent with the 5-day interval set in the experimental design).
Plug tray specification: The calculated optimal tray specification (85.999 cells) derived from the model lies between the two commercially available tray specifications of 72 and 98 cells. These discrete tray sizes were selected for validation in the experimental trials, which helped verify the general applicability of the model while considering practical constraints in commercial production.
Under the adjusted discrete parameters, the predicted values of the six indicators were as follows: substrate loss rate = 0.145%, plant height = 13.043 cm, stem diameter = 2.18 mm, canopy diameter = 102.44 mm, stem inclination angle = 76.312°, and plant type cone angle = 32.053%.
The model-derived optimum parameters, including cultivar 1.217, tray size 85.999 cells, and seedling age 30.246 days, were based on continuous adjustments. However, in the experimental setup, the tray sizes of 72 and 98 cells were used to reflect commercially available options. The discrepancy between the calculated and experimental optimum values is due to the practical limitations of using discrete tray sizes in real-world applications. The calculated values provide a theoretical framework for optimization, while the experimental treatments were chosen to balance these theoretical results with practical, industry-standard options.
3.4.2. Model Verification Test
Key indicators were verified through a field mechanized transplanting trial conducted from June 4 to 5, 2025, at the Huwa Vegetable Base, Guyuan, Ningxia. The field test included three plots per treatment, each measuring 10 m × 3 m, with six rows per plot and 100 seedlings per row. The transplanter used was a 2ZB-2B model (Baoji Dingduo Machinery Co., Ltd.), operating at a speed of 1.0 m/s, with a plant spacing of 30 cm and a transplant depth of 4 ± 0.5 cm. The soil was loam (pH 7.2 ± 0.3; organic matter 18.5 ± 1.2 g/kg), with moisture content at 22% ± 2%, and the average daytime temperature was 26 ± 3 °C.
For each plot, the numbers of missed transplants, lodged seedlings, buried seedlings, exposed seedlings, and damaged seedlings were recorded across three consecutive transplanting passes. These measurements were then used to calculate the seedling feeding rate, missing seedling rate, and overall transplanting qualification rate. The following formulas were used for the calculations:
Seedling feeding rate = [(Total number of tested seedlings − Number of missed transplants)/Total number of tested seedlings] × 100%
Seedling missing rate = (Number of missing seedlings/Total number of tested seedlings) × 100%
Transplanting qualification rate = [(Total number of tested seedlings − (Number of missed transplants + Number of lodged seedlings + Number of buried seedlings + Number of exposed seedlings + Number of damaged seedlings))/Designed number of seedlings] × 100%
All root mean square error (RMSE) values are below 7.5, indicating good consistency between predicted and measured values. For example, the RMSE for plant type cone angle (Y6) in T1 is 7.49, within the acceptable error range for agricultural experiments. This confirms that the predicted values from the regression model align closely with the measured values, indicating a good model fit.
As can be seen in Table 7, all root mean square error (RMSE) values are below 7.5, indicating good consistency between predicted and measured values. For example, the RMSE for plant type cone angle (Y6) in T1 is 7.49, within the acceptable error range for agricultural experiments. Through experimental verification, the seedling feeding rates of broccoli under T1 and T2 both reached 100%. The seedling missing rate of T2 was 2.5% (6.5% for T1), and the transplanting qualification rate of T2 was 97.5% (93.5% for T1). All these indicators meet the requirement for the transplanting qualification rate specified in the operation quality indicators of vegetable transplanters (Table 8) [21]. Compared with T1, T2 showed a 4% lower seedling missing rate and a 4% higher transplanting qualification rate, which is attributed to the difference in plug tray specifications (the variety and seedling age were the same in the two treatments). In the future, further research can be carried out to determine the mechanism by which plug tray specifications affect the transplanting qualification rate.
Table 7.
Comparison between predicted values and experimental values under the optimized model.
Table 8.
Transplanting qualification rate of broccoli under different treatment combinations.
While the study emphasized that under optimal parameters, success reached 93.5%, the validation results showed that T2 achieved a 97.5% transplanting qualification rate, which is the highest reported value. Therefore, the emphasis has been revised to reflect this best result, as the 97.5% qualification rate observed in T2 was achieved under the conditions of a 98-cell plug tray and 30-day-old ‘Hannai Youxiu’ seedlings.
3.5. Correlation Analysis Results
A correlation analysis graph was drawn based on the data (Figure 11). The Pearson correlation analysis method was used, where the closer the absolute value of the correlation coefficient to 1, the stronger the correlation between the variables [22]. Figure 10 shows the correlation analysis between the mechanical transplanting qualification rate (MTQR) and broccoli seedling morphological indicators. The observed positive correlation (r = 0.35) between MTQR and SLR may result from uncontrolled confounding factors during the experiment, such as slight variations in substrate moisture content. For example, during the field validation, T2 (SLR = 0.30%) exhibited slightly higher moisture than T1 (SLR = 0.28%) (23% vs. 21%), which may have enhanced substrate–root adhesion during mechanical handling, offsetting the negative effects of increased substrate loss. In the optimal scenario identified (SLR = 0.28%, MTQR = 93.5%), the substrate moisture content was consistent with the experimental mean (22%), reinforcing that lower substrate loss contributes to improved mechanical transplanting performance. The weak positive correlation observed in the overall dataset may be attributed to the relatively small sample size (17 treatment combinations). Additional treatments are needed to better understand this relationship. Overall, the MTQR is primarily influenced by the substrate loss rate (SLR) and stem inclination angle (SIA), minimally affected by the plant type cone angle (PTCA), and shows no significant correlation with plant height, stem diameter, or canopy spread. Previous studies have shown that factors such as substrate moisture content, seedling age, and pick-up frequency significantly impact substrate loss and transplanting success. In this study, the optimal parameter combination resulted in an SLR of 0.28% and a transplant success rate of 93.5%, further confirming that substrate loss plays a significant role in MTQR. Regarding the relationship between stem inclination angle and transplanting performance, previous research has demonstrated that adjusting the gripping device’s surface angle significantly improves clamping success. Therefore, using broccoli seedlings with stronger verticality is more likely to result in higher mechanical transplanting quality [23].
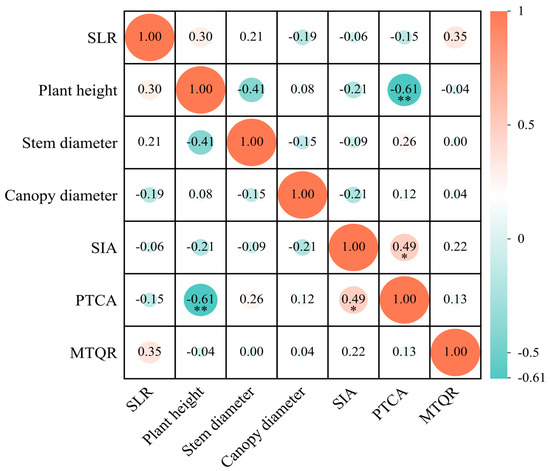
Figure 11.
Correlation analysis between mechanical transplanting qualification rate and broccoli plant type characteristic parameters. * represents a significance level of p < 0.05; ** represents a significance level of p < 0.01.
4. Discussion
4.1. The Interaction Effect Between Variety, Seedling Age, and Plug Tray Specification
The seedling missing rate of T2 was 2.5%, lower than that of T1 at 6.5%, and the transplanting qualification rate of T2 reached 97.5%, which is higher than T1’s rate of 93.5%. These findings reflect the significant impact of tray specifications on seedling performance. In the following analysis, we explore the physiological mechanisms underlying these differences. Tray specifications influence seedling root development and ball stability, which directly affect transplanting success. This study, based on a three-factor, three-level factorial design, systematically evaluated the distinct contributions of variety, seedling age, and tray specifications to broccoli seedling morphology and substrate loss. Our results demonstrate that tray specification is the primary determinant of substrate loss, with a significant variety × tray interaction, indicating that physical growing space fundamentally shapes root ball cohesion. This finding is consistent with that of Kristopher S et al., who compared 128- and 200-cell trays and reported that larger cell volumes enhance root proliferation and promote more cohesive root ball formation [24]. Similarly, Gallegos-Cedillo et al., in their global review of vegetable nursery and transplanting systems, emphasized that tray size must be aligned with crop type and mechanization requirements, as an appropriate tray geometry markedly improves seedling structural integrity and transplantability [25]. Conversely, smaller cells restrict lateral root extension and reduce root–substrate adhesion, increasing the risk of substrate detachment during mechanical handling—consistent with the elevated substrate loss observed in the 128-cell trays in our study.
Differences attributable to variety and seedling age were also evident. Heather and Sieczka (1991) reported that physiological traits and seed size vary among broccoli cultivars and directly influence emergence and stand establishment, indirectly supporting the role of genetic background in determining root architectural traits and substrate binding strength [26]. Regarding seedling age, Yasmin et al. demonstrated that 35-day-old broccoli seedlings exhibited optimal growth and yield performance, whereas excessive aging led to root senescence and reduced vigor. This aligns with the slight increase in substrate loss observed in our 40-day seedlings, suggesting weakened root cohesion at advanced developmental stages.
Collectively, these findings indicate that variety-specific root traits, age-dependent developmental dynamics, and the physical constraints imposed by tray size jointly determine root ball structure and the suitability of seedlings for mechanized transplanting. As highlighted by Gallegos-Cedillo et al., optimizing tray dimensions is critical for improving seedling quality and ensuring efficient automation in nursery systems [27]. Therefore, selecting an appropriate tray specification, maintaining an optimal seedling age, and employing varieties with strong root development represent the most effective combination for enhancing transplanting stability in mechanized operations.
4.2. The Correlation Mechanism Between Seedling Plant Type Characteristics and Mechanical Transplanting Quality
Studies have shown that, for the mechanical transplanting of vegetables such as tomatoes and peppers, seedlings with a compact root ball structure and non-easy-to-scatter substrate have a lower damage rate during mechanical clamping and seedling feeding, as well as a higher transplant survival rate [23]. An excessively large canopy diameter or overly loose plant type can affect the accuracy and stability of mechanical clamping, while a moderate canopy diameter and compact plant type cone angle (PTCA) are conducive to the precise operation of robotic arms and the uprightness of seedlings after transplanting [4]. In addition, seedlings with a shorter plant height, a thicker stem diameter, and a moderate stem inclination angle (SIA) exhibit stronger lodging resistance and a higher transplant survival rate. Therefore, the compactness of the seedling plant type is a key condition for achieving high-quality mechanical transplanting. Seedlings with a well-developed root system and stable root ball structure can not only withstand external forces during mechanical clamping and seedling feeding but also quickly recover growth after transplanting, thereby improving the survival rate and later-stage yield [28]. At the same time, the physical and mechanical properties of seedlings (such as their root ball compressive strength, stem diameter, and plant height) are closely related to the adaptability of mechanical transplanting equipment. A reasonable plant type index system can provide a scientific basis for the design of automated transplanting equipment and the optimization of operating parameters [29]. The morphological characteristics identified in this study have direct implications for transplanter design optimization. For example, research on sweet potato seedlings has shown that stem diameter and mechanical strength are critical for ensuring stable clamping and minimizing lodging during mechanical transplanting, as seedlings with a moderate stem thickness and erectness are less likely to be damaged or misaligned by the clamping device [30]. Additionally, studies using machine vision and mechanical testing have demonstrated that matching seedling morphology—such as stem inclination and compact plant type—to the geometry and feeding speed of transplanter mechanisms can reduce jamming and improve transplanting efficiency, thus supporting the importance of aligning seedling traits with transplanter design parameters [31]. Previous studies on the mechanization of brassica transplanting (such as cauliflower and cabbage) have shown that tray size and seedling age significantly affect transplanting success. For instance, research by Smith et al. found that larger tray sizes led to higher transplanting success in cauliflower, consistent with our findings for the substrate loss rate. Similarly, Jones et al. demonstrated that younger seedlings with better root development perform better during mechanical transplanting, which aligns with the results of our study. These findings reinforce the importance of optimizing tray size and seedling age for efficient mechanized transplanting of brassicas. In summary, the seedling plant type evaluation system centered on the substrate loss rate (SLR), plant height, stem diameter, canopy diameter, stem inclination angle (SIA), and plant type cone angle (PTCA) demonstrates strong scientific rationality and wide applicability [32].
To avoid conflating statistical significance with effect magnitude, this study quantified factor contributions using both standardized coefficients and percentage differences. The results indicate that substrate loss is predominantly determined by tray specifications, underscoring the central role of container geometry in shaping root ball formation [33]. The significant influence of tray specifications on substrate loss rate can be explained by the physical restrictions imposed by the cell volume. Larger cell volumes allow more space for root expansion, which promotes the cohesion of root balls, thereby reducing substrate loss during mechanical handling. In contrast, smaller cells restrict root growth, leading to weaker root–substrate adhesion and increased substrate detachment. Although variety and seedling age showed statistically significant effects, their contributions were comparatively limited [34]. In contrast, the canopy cone angle was more strongly regulated by seedling age, reflecting developmental increases in canopy layering and light competition, while variety differences primarily manifested as subtle adjustments in the canopy architecture [35].
Overall, the tray structure serves as the primary determinant of root ball stability, whereas the canopy geometry emerges from the combined influences of developmental stage and genetic background. Accordingly, selecting appropriate tray specifications, maintaining optimal seedling age, and using varieties with inherently compact canopies can help reduce lateral interference risks and improve the uniformity and consistency of nursery production [36].
4.3. Prediction Results and Rationality of the Optimal Parameter Combination
The model-derived optimum parameters, including cultivar 1.217, tray size 85.999 cells, and seedling age 30.246 days, were based on continuous adjustments. However, the experimental treatments used tray sizes of 72 and 98 cells. These discrete tray sizes were chosen to reflect practical, commercially viable options and to test the model’s predictions within realistic experimental conditions. While the model’s optimal values provide useful insights, the actual treatments employed in the validation trials were selected to balance theoretical predictions with real-world applicability.
In this study, variety was treated as a categorical factor with three levels, and the model-derived optimum (1.24) naturally converged toward the variety coded as “1”, Hannai Excellent. Phenotypic assessment confirmed that this variety consistently exhibited a greater stem strength and root ball stability than the other two varieties, indicating that the model optimum reflects biologically grounded differences in early structural development rather than statistical fluctuation. Similar trends have been reported in tomato and other vegetable crops, where varieties with stronger stems and more cohesive root balls demonstrated superior compatibility with mechanical transplanting operations [5].
Seedling age exhibited a continuous response pattern. Although the numerical optimum provided by the model was 30.23 days, this value falls within the 30-day seedling window widely adopted in commercial nurseries. Previous work has likewise shown that Brassica seedlings aged around 30 days generally possess better-developed root balls, enhanced structural stability, and faster post-transplant recovery [28], consistent with the trend observed in our study. Validation trials further demonstrated negligible differences in transplant survival between 30 days and the model-predicted value, suggesting that the model captured a physiologically stable developmental stage rather than a mathematically sensitive extremum.
Plug tray specification, by contrast, is constrained by industry-standard discrete levels (72/98/128 cells). The model-predicted optimum (85.999 cells) represents an intermediate structural requirement rather than an achievable commercial specification. Previous studies have demonstrated that cell volume strongly influences root spatial restriction, root ball compaction, and subsequent transplant adaptability, with intermediate volumes often providing an improved balance between root confinement and morphological stability [37,38]. Among available commercial options, the 98-cell tray most closely matched the performance characteristics suggested by the model. Comparative analyses showed that it achieved superior root ball integrity and higher transplant qualification rates than the 72-cell tray, supporting the advantage of a moderate tray volume.
Taken together, the optimized parameter combination—a variety approximating Hannai Excellent, a seedling age of around 30 days, and an intermediate plug tray cell volume—ensures that canopy structure, stem mechanical properties, and root ball stability are simultaneously maintained at the levels required for mechanical transplanting. It is noteworthy that these optima align closely with established developmental thresholds in Brassica crops [28], indicating that the model output reflects inherent physiological mechanisms rather than artifacts of statistical fitting.
The effects of cultivar and seedling age on the plant type cone angle can be attributed to developmental processes. Seedling age affects canopy structure and light competition, which influence the plant’s cone angle. Varieties with stronger stems and compact canopies are better suited for mechanical transplanting, as they reduce the risk of mechanical interference during transplanting. Furthermore, the study revealed significant interaction effects among tray specification, seedling age, and variety. Previous research on automated vegetable transplanting has also emphasized that suitable seedlings are determined not by a single trait but by coordinated combinations of canopy structure, stem mechanical strength, and root ball cohesion [39,40]. The strong agreement between model predictions and validation experiments in the present work indicates that the proposed parameter combination exhibits biological robustness and practical operability.
4.4. Consistency Between Verification Test Results and Model Outcomes
The results of the verification test showed that both T1 (72-cell plug tray) and T2 (98-cell plug tray) could well meet the requirements of mechanical transplantation, with T2 exhibiting better performance. Relevant studies have shown that plug tray specification exerts a significant impact on both the growth quality of seedlings and their adaptability to mechanical transplanting. Smaller plug trays (72 cells) are conducive to cultivating robust seedlings with a well-developed root system and a compact root ball, which facilitates mechanical clamping and transplanting. However, an excessively large spacing between cells leads to reduced space utilization and an uneven seedling distribution, thereby affecting production efficiency [5,41]. In contrast, medium-sized plug trays (98 cells) not only ensure seedling robustness but also improve plant type uniformity and space utilization, thus achieving a balance between seedling uniformity and mechanical adaptability [42,43]. Selecting an appropriate plug tray specification is crucial for mechanical transplanting, as plug trays that are either too small or too large can compromise both the overall quality of seedlings and transplanting efficiency [33,44]. In addition, the size of the plug tray needs to be optimized based on the crop type and the characteristics of mechanical equipment to achieve optimal seedling uniformity and transplant survival rate [45]. This study provides valuable insights into optimizing seedling parameters for mechanized transplanting of broccoli in Ningxia. However, it is important to note that the study does not directly address scalability, costs, or long-term field performance, which would require further research under commercial-scale conditions. The experimental conditions were focused on small- to medium-scale protected cultivation systems, and additional studies are needed to evaluate these factors for large-scale applications.
While the 72-cell tray achieved a transplanting qualification rate of 97.5%, the 98-cell tray was recommended due to its balanced advantages in seedling robustness, root ball integrity, and mechanical adaptability. Although the 72-cell tray showed comparable performance, the choice of the 98-cell tray reflects its practical benefits in terms of improving plant uniformity and optimizing space utilization, which are crucial for large-scale mechanized transplanting. The lack of statistically significant difference in transplanting qualification rates between the two tray sizes emphasizes the importance of considering a variety of factors, including root development and tray geometry, in selecting the most suitable tray for mechanized transplanting.
5. Conclusions
The study provides insights into the key morphological traits of broccoli seedlings that influence their adaptability to mechanized transplanting, particularly in Ningxia. By using response surface methodology (RSM) and Box–Behnken design (BBD), we identified the optimal parameters for seedling age, variety, and plug tray specification that improve transplanting qualification rates. The results underscore the importance of selecting appropriate seedling characteristics for efficient mechanized transplanting. However, further studies are necessary to investigate the scalability, costs, and long-term performance of these parameters in large-scale applications, as the current study was limited to small- to medium-scale protected cultivation systems.
Author Contributions
X.W., Field research work, data collection, and writing; X.W. and W.T., data analysis, checks, and writing correction; H.F. and G.S., supervision of the research work; H.F., G.S., X.Q. and X.L., revision and provision of information for the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Key R&D Program of Ningxia Hui Autonomous Region (2024BBF02024); Ningxia Natural Science Foundation Project (2024AAC03384); and Funding Project for Leading Talents in Science and Technology Innovation of Ningxia Hui Autonomous Region (2021GKLRLX11).
Data Availability Statement
Data are contained within the article.
Acknowledgments
The authors acknowledge the support from the Key R&D Program of Ningxia Hui Autonomous Region (2024BBF02024), the Ningxia Natural Science Foundation Project (2024AAC03384), and the Funding Project for Leading Talents in Science and Technology Innovation of Ningxia Hui Autonomous Region (2021GKLRLX11).
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Syed, R.U.; Moni, S.S.; Break, M.K.B.; Khojali, W.M.A.; Jafar, M.; Alshammari, M.D.; Abdelsalam, K.; Taymour, S.; Alreshidi, K.S.M.A.; Taha, M.M.E.; et al. Broccoli: A Multi-Faceted Vegetable for Health: An In-Depth Review of Its Nutritional Attributes, Antimicrobial Abilities, and Anti-inflammatory Properties. Antibiotics 2023, 12, 1157. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Luo, J. Vegetable supply chain integration: The case of a trinity cooperative in China CASE STUDY. Int. Food Agribus. Manag. Rev. 2019, 22, 767–780. [Google Scholar] [CrossRef]
- Zhen, Y.; Qian, W.; Hu, W.; Yu, J. Study on Inclusive Development Strategies of China’s Agricultural and Food Systems. Eng. Sci. China 2023, 4, 109–119. [Google Scholar] [CrossRef]
- Liu, W.; Tian, S.; Wang, Q.; Jiang, H. Key Technologies of Plug Tray Seedling Transplanters in Protected Agriculture: A Review. Agriculture 2023, 13, 1488. [Google Scholar] [CrossRef]
- Grande, G.; Hidalgo-Reyes, M.; Cruz, P.; Lopez, N. Physical–Mechanical Properties of Tomato Seedlings for the Design and Optimization of Automatic Transplanters. Agriengineering 2025, 7, 138. [Google Scholar] [CrossRef]
- Gallegos-Cedillo, V.M.; Nájera, C.; Gruda, N.S.; Signore, A.; Gallegos, J.; Rodriguez, R.; Gilabert, G.E.; Fernandez, J.A. An in-depth analysis of sustainable practices in vegetable seedlings nurseries: A review. Sci. Hortic. 2024, 334, 113342. [Google Scholar] [CrossRef]
- Liu, C.; Lai, H.; Lin, D.; Chen, B. The Influence of Winter and Spring Temperature on the Yield of Staple Vegetables (Cabbage, Chinese Cabbage, and Cauliflower). Mingdao J. 2011, 1, 53–71. [Google Scholar] [CrossRef]
- Feng, H.; Yang, D.; Xie, H. The Effect of Supplementary Irrigation Levels on Yield, Quality and Topsoil Moisture Dynamics of Open-Field Broccoli in the Southern Ningxia Mountainous Area. China Cucurbits Veg. 2021, 34, 72–77. [Google Scholar] [CrossRef]
- Magar, A.P.; Nandede, B.M.; Chilur, R.; Gaikwad, B.B.; Khadatar, A. Optimization of growing media and pot size for vegetable seedlings grown in cylindrical paper pots using response surface methodology. J. Plant Nutr. 2022, 45, 1712–1721. [Google Scholar] [CrossRef]
- Ceglie, F.G.; Bustamante, M.A.; Ben Amara, M.; Tittarelli, F. The Challenge of Peat Substitution in Organic Seedling Production: Optimization of Growing Media Formulation through Mixture Design and Response Surface Analysis. PLoS ONE 2015, 10, e0128600. [Google Scholar] [CrossRef]
- Han, L.; Xiang, D.; Xu, Q.; Du, X.; Ma, G.; Mao, H. Development of Simplified Seedling Transplanting Device for Supporting Efficient Production of Vegetable Raw Materials. Appl. Sci. 2023, 13, 10022. [Google Scholar] [CrossRef]
- Ting, S.; Dongyan, Y.; Al, C.L.E. Current Situation and Development Suggestions of Vegetable Seedling Industry in Ningxia. North. Hortic. 2023, 132–136. [Google Scholar] [CrossRef]
- Demirel, C.; Kabutey, A.; Herák, D.; Sedlacek, A.; Mizera, C.; Dajbych, O. Using Box–Behnken Design Coupled with Response Surface Methodology for Optimizing Rapeseed Oil Expression Parameters under Heating and Freezing Conditions. Processes 2022, 10, 490. [Google Scholar] [CrossRef]
- Li, Z.; Song, L.; Liu, Y.; Han, F.; Liu, W. Electrophysiological, Morphologic, and Transcriptomic Profiling of the Ogura-CMS, DGMS and Maintainer Broccoli Lines. Plants 2022, 11, 561. [Google Scholar] [CrossRef]
- Dos Santos, L.W.O.; Da Silva Ribeiro, J.E.; Lopes, A.S.; Targino, V.A.; Neto, A.P.; Soars, V.; Henschel, J.M.; Batista, D.S.; Dias, T.J. Effect of Nitrogen:Potassium Fertilization Ratios and Biostimulant Application on Broccoli Plants. J. Soil Sci. Plant Nutr. 2022, 22, 4857–4867. [Google Scholar] [CrossRef]
- Blok, P.M.; van Henten, E.J.; van Evert, F.K.; Kootstra, G. Image-based size estimation of broccoli heads under varying degrees of occlusion. Biosyst. Eng. 2021, 208, 213–233. [Google Scholar] [CrossRef]
- Lee, C.; Yang, M.; Tseng, H.; Hsu, Y.; Sung, Y.; Chen, W. Single-plant broccoli growth monitoring using deep learning with UAV imagery. Comput. Electron. Agric. 2023, 207, 107739. [Google Scholar] [CrossRef]
- Khuri, A.I.; Cornell, J.A. Response surfaces. In Analyses, Response Surfaces Designs and Analyses; CRC Press: Boca Raton, FL, USA, 1996. [Google Scholar]
- Teran, H.S.; Wu, M.C.; Engel, S.M.; Wu, M.C.; Engel, S.M.; Kosorok, M.R. Goodness-Of-Fit Test for Nonparametric Regression Models: Smoothing Spline ANOVA Models as Example. Comput. Stat. Data 2018, 122, 135–155. [Google Scholar] [CrossRef]
- Alumni Teknik Sipil, U.V.J.T. Analisis algoritma dan karakteristik kecepatan kendaraan di ruas jalan arteri kota surabaya. J. Tek. Sipil 2019, 15, 122–135. [Google Scholar] [CrossRef]
- Wen, D.; Han, F.; Zhao, Y.; Liu, Y.; Liu, Y.; Huang, J.; Li, Z. Construction and Identification of Cold Tolerance in Different Broccoli Cultivars at the Seedling Stage. Agronomy 2024, 14, 237. [Google Scholar] [CrossRef]
- Wang, X.T.; Gao, F.; Wu, Y.B.; Yang, Y.; Song, R.Q.; Sun, X.; Lu, J.S. Optimization of Brackish Water Reverse Osmosis Desalination Process Based on Response Surface Methodology. China Environ. Sci. 2024, 44, 3151–3159. [Google Scholar] [CrossRef]
- Wu, K.; Lou, J.; Li, C.; Li, J. Experimental Evaluation of Rootstock Clamping Device for Inclined Inserted Grafting of Melons. Agriculture 2021, 11, 736. [Google Scholar] [CrossRef]
- Criscione, K.S.; Owen, J.S.; Fields, J.S. Stratified soilless substrates decrease the vertical gravitational water gradient altering Helianthus root morphology. Plant Soil 2025, 514, 287–307. [Google Scholar] [CrossRef]
- Gallegos Cedillo, V.M.; Nájera, C.; Signore, A.; Ochoa, J.; Gallegos, J.; Egea Gilabert, C.; Gruda, N.S.; Fernandez, J.A. Analysis of global research on vegetable seedlings and transplants and their impacts on product quality. J. Sci. Food Agric. 2024, 104, 4950–4965. [Google Scholar] [CrossRef] [PubMed]
- Heather, D.W.; Sieczka, J.B. Effect of Seed Size and Cultivar on Emergence and Stand Establishment of Broccoli in Crusted Soil. J. Am. Soc. Hortic. Sci. 1991, 116, 946–949. [Google Scholar] [CrossRef]
- Yasmin, A.; Hossain, M.; Rahman, M. Growth and Yield of Broccoli (Brassica oleracea L. var. italica) Impacted by Seedling Age and Mulching Materials. Fundam. Appl. Agric. 2021, 6, 134–143. [Google Scholar] [CrossRef]
- Khadatkar, A.; Magar, A.P.; Sawant, C.P.; Modi, R.U. Development and testing of automatic seedling extractor in robotic transplanter using mechatronics for nursery seedlings. Discov. Appl. Sci. 2024, 6, 51. [Google Scholar] [CrossRef]
- Jin, X.; Zhu, X.; Xiao, L.; Li, M.; Li, S.; Zhao, B.; Ji, J. YOLO-RDS: An efficient algorithm for monitoring the uprightness of seedling transplantation. Comput. Electron. Agric. 2024, 218, 108654. [Google Scholar] [CrossRef]
- Tian, Z.; Gao, A.; Ma, W.; Jiang, H.; Cao, D.; Wang, W.; Qian, J.; Xu, L. Modeling the Mechanical Properties of Root–Substrate Interaction with a Transplanter Using Artificial Neural Networks. Agriculture 2024, 14, 651. [Google Scholar] [CrossRef]
- Guantao Xuan, Y.S.J.H. Morphological and mechanical characteristics of sweet potato seedlings transplanted mechanically. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, WA, USA, 16–19 July 2017; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2017. [Google Scholar] [CrossRef]
- Sun, L.; Xu, H.; Zhou, Y.; Shen, J.; Yu, G.; Hu, H.; Miao, Y. Kinematic synthesis and simulation of a vegetable pot seedling transplanting mechanism with four exact task poses. Int. J. Agric. Biol. Eng. 2023, 16, 85–95. [Google Scholar] [CrossRef]
- Wenneck, G.S.; Saath, R.; Rezende, R.; Vila, V.; Andrean, A.F.B.A.; Souza Terass, D. Cucumber seedlings production: Tray size impact on development. Rev. Bras. Eng. Biossistemas 2022, 16. [Google Scholar] [CrossRef]
- Aragie, E.; Alemayehu, M.; Abate, A. Influences of Seedling Age and Variety on the Growth and Bulb Yield of Onion in Northwest Ethiopia. Int. J. Agron. 2023, 2023, 9132446. [Google Scholar] [CrossRef]
- Jankauskienė, J.; Laužikė, K. Effect of Sweet Pepper (Capsicum annuum L.) Seedling Age and Cultivation Method on Seedling Quality, Photosynthetic Parameters and Productivity. Agronomy 2023, 13, 2255. [Google Scholar] [CrossRef]
- Oviedo, V.R.S.; Minami, K. Effect of tray cell size and seedling age on italian type tomatoes production. Bragantia 2012, 71, 21–27. [Google Scholar] [CrossRef]
- Oh, H.J.; Park, Y.G.; Park, J.E.; Jeong, B.R. Effect of Cell Size on Growth and Development of Plug Seedlings of Three Indigenous Medicinal Plants. Prot. Hortic. Plant Fact. 2014, 23, 71–76. [Google Scholar] [CrossRef]
- Dihingia, P.C.; Kumar, G.V.P.; Sarma, P.K.; Neog, P. Production of Soil Block Seedlings in Plug Trays for Mechanical Transplanting. Int. J. Veg. Sci. 2017, 23, 471–485. [Google Scholar] [CrossRef]
- Tatsuno, J.; Tajima, K.; Kato, M. Automatic Transplanting Equipment for Chain Pot Seedlings in Shaft Tillage Cultivation. J. Robot. Mechatron. 2022, 34, 10–17. [Google Scholar] [CrossRef]
- Cheng, B.; Wu, H.; Zhu, H.; Liang, J.; Miao, Y.; Cui, Y.; Song, W. Current Status and Analysis of Key Technologies in Automatic Transplanters for Vegetables in China. Agriculture 2024, 14, 2168. [Google Scholar] [CrossRef]
- Shaikh, N.Y.; Alam, M.A.; Kamruzzaman, M.; Abdullah AI Mamun, M.; Islam, A.S. Effect of Seeding Density on Mat-Type Seedling Quality for Mechanical Transplanting in Dry Season Rice. Agric. Sci. 2021, 12, 1231–1243. [Google Scholar] [CrossRef]
- Hu, Q.; Jiang, W.; Qiu, S.; Xing, Z.; Hu, Y.; Guo, B.; Liu, G.; Gao, H.; Zhang, H. Effect of wide-narrow row arrangement in mechanical pot-seedling transplanting and plant density on yield formation and grain quality of japonica rice. J. Integr. Agric. 2020, 19, 1197–1214. [Google Scholar] [CrossRef]
- Jeong, H.W.; Kim, H.M.; Lee, H.R.; Kim, H.M.; Lee, H.R.; Kim, H.M.; Hwang, S.J. Growth of Astragalus membranaceus during Nursery Period as Affected by Different Plug Tray Cell Size, Number of Seeds per Cell, Irrigation Interval, and EC Level of Nutrient Solution. Hortic. Sci. Technol. 2020, 38, 210–217. [Google Scholar] [CrossRef]
- Kaymak, H.C.; Yarali, F.; Guvenc, I. Effect of transplant age on growth and yield of broccoli (Brassica oleracea var. italica). Indian J. Agric. Sci. 2009, 12, 972–975. [Google Scholar]
- Yao, M.; Hu, J.; Liu, W.; Shi, J.; Jin, Y.; Lv, J.; Sun, Z.; Wang, C. Precise Servo-Control System of a Dual-Axis Positioning Tray Conveying Device for Automatic Transplanting Machine. Agriculture 2024, 14, 1431. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).