

Are Supervised Learning Methods Suitable for Estimating Crop Water Consumption under Optimal and Deficit Irrigation?



Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area and Experiment Design
2.2. Weather, Crop and Soil Data
2.3. Estimation of Soil Water Balance and Adjusted Crop Evapotranspiration
2.4. Machine Learning Methods
2.4.1. Random Forest
2.4.2. Support Vector Machine
2.4.3. Adaptive Boosting
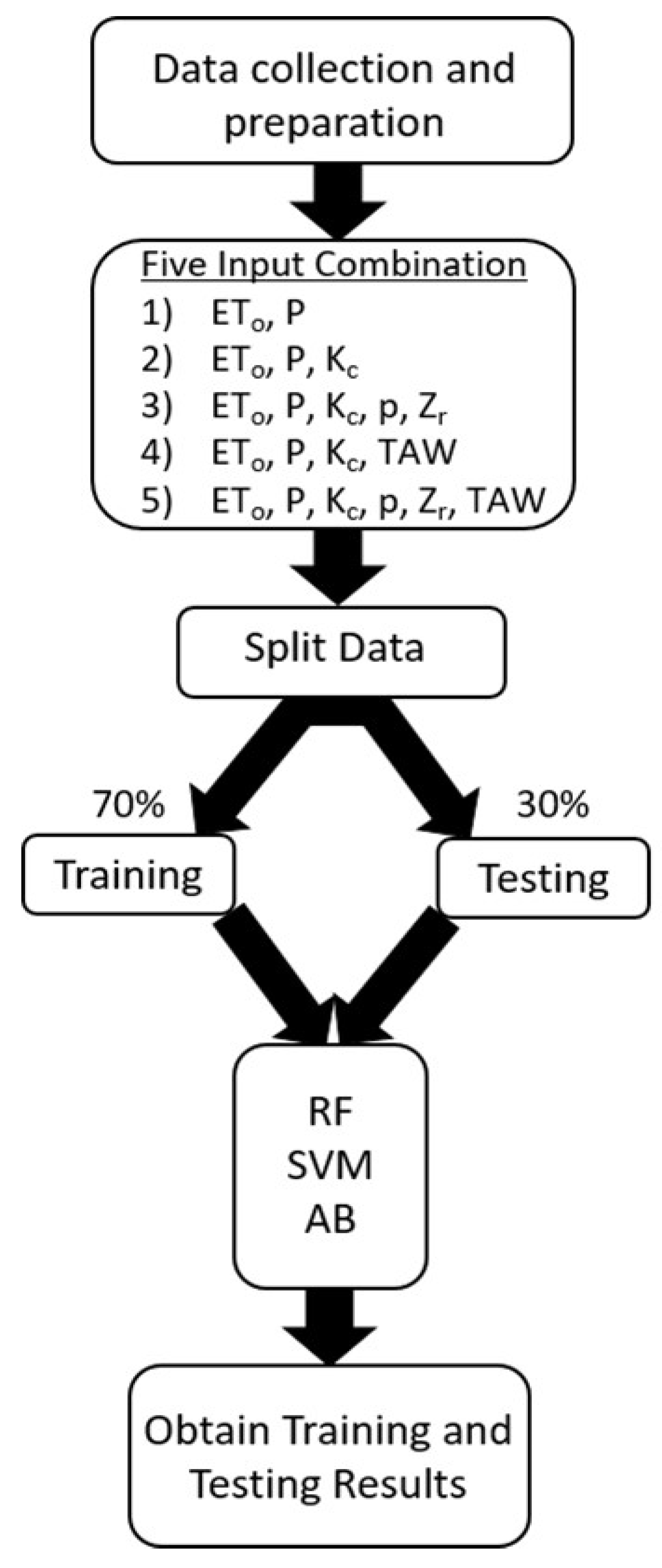
2.5. Input Scenarios and Model Development
2.6. Statistical Evaluation
3. Results and Discussion
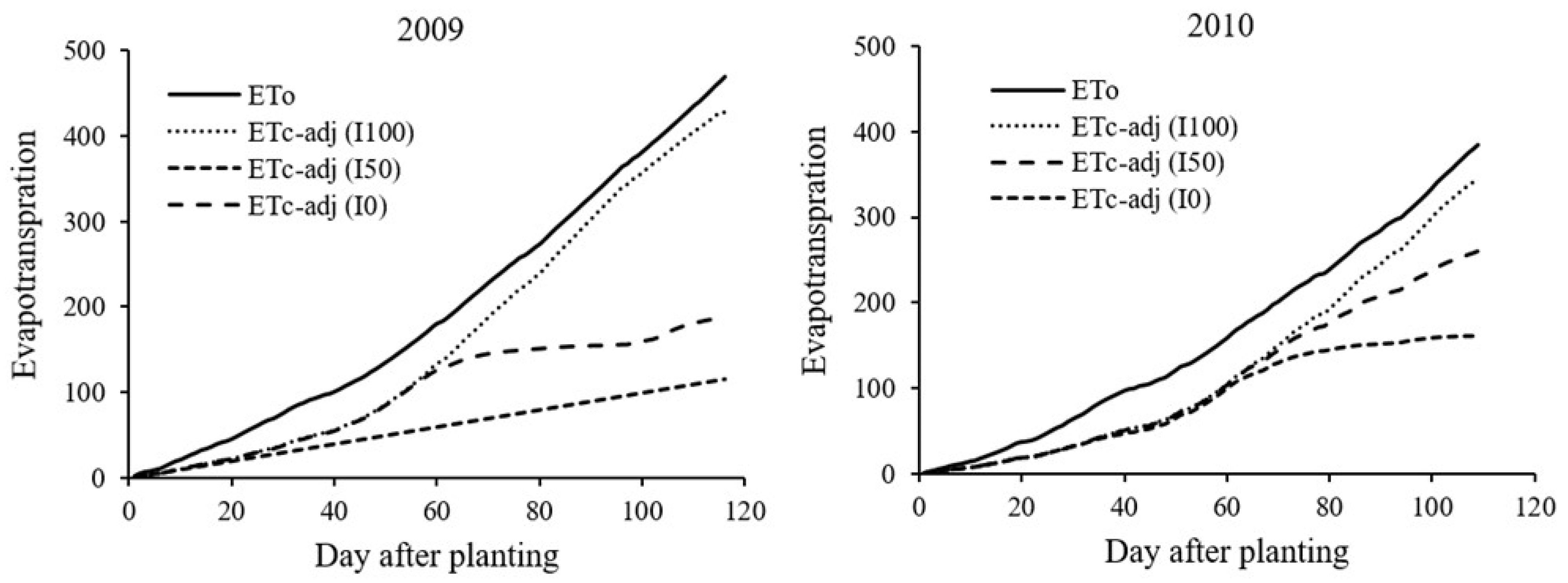
3.1. Crop Evapotranspiration under Different Water Supply and Water Stress
3.2. Assessment of Performances of Machine Learning Methods under Different Irrigation Regimes
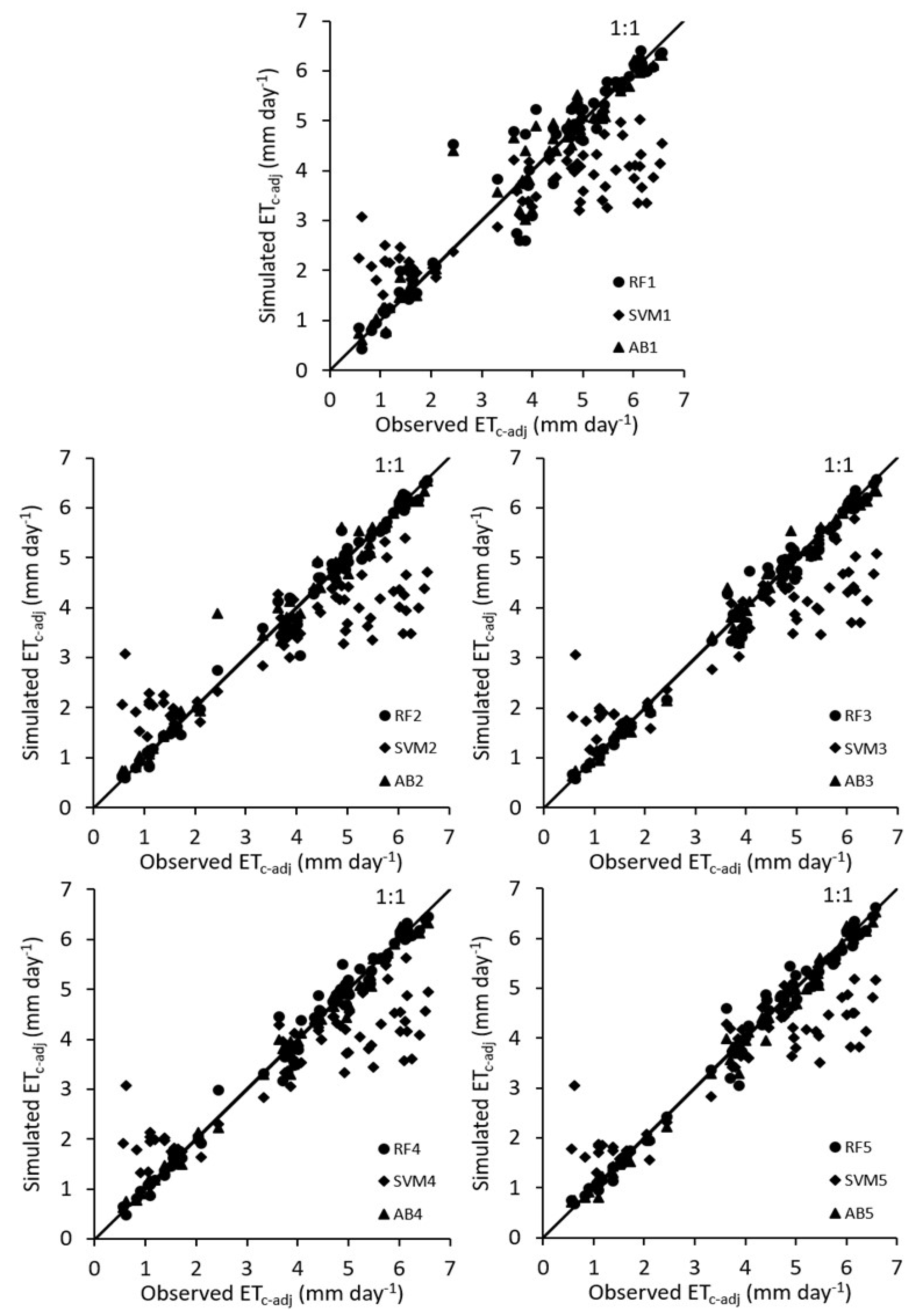
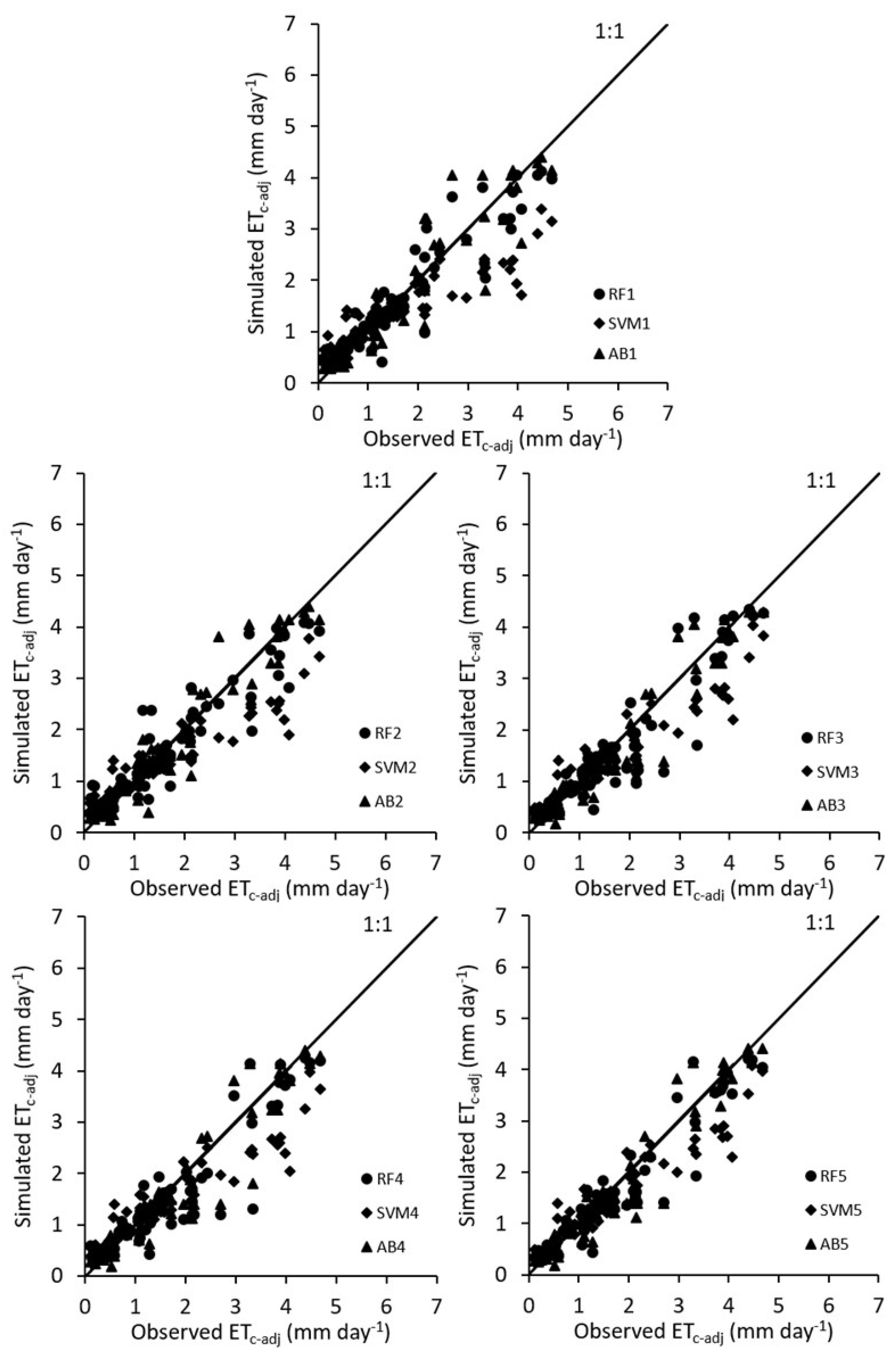
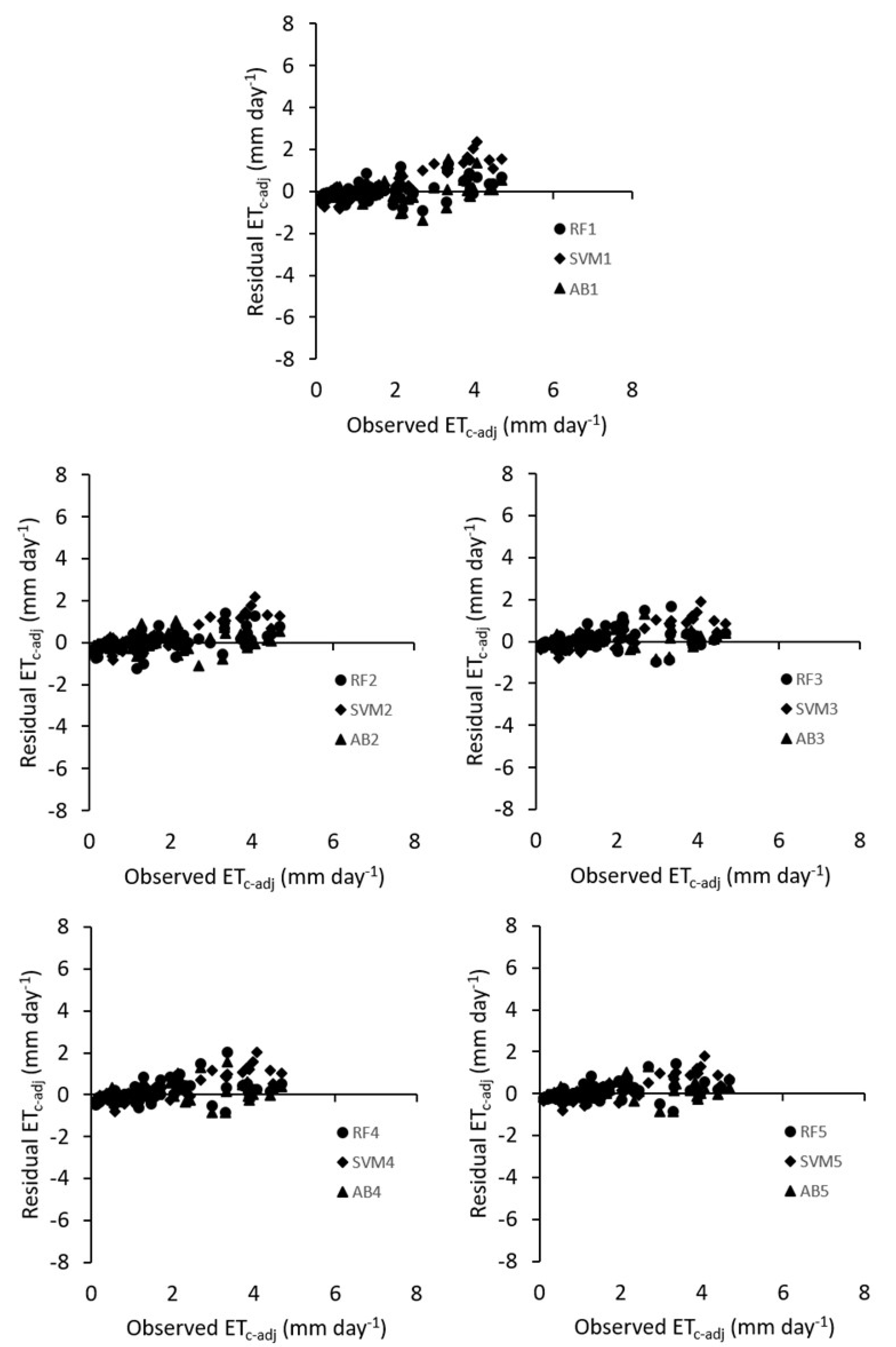
3.2.1. Performances of Machine Learning Methods under Optimal Irrigation Regime (I100)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input/Model | Training | Testing | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | RMSE | MSE | Slope | EF | R2 | MAE | RMSE | MSE | EF | Slope | R2 | |
| (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | |||||||
| ETo, P | ||||||||||||
| RF1 | 0.390 | 0.657 | 0.431 | 0.985 | 0.886 | 0.887 | 0.308 | 0.490 | 0.240 | 0.931 | 0.956 | 0.933 |
| SVM1 | 1.140 | 1.402 | 1.965 | 1.957 | 0.482 | 0.637 | 1.053 | 1.299 | 1.686 | 0.512 | 1.689 | 0.723 |
| AB1 | 0.377 | 0.717 | 0.514 | 0.961 | 0.864 | 0.866 | 0.254 | 0.396 | 0.157 | 0.955 | 0.992 | 0.956 |
| ETo, P, Kc | ||||||||||||
| RF2 | 0.225 | 0.495 | 0.245 | 1.006 | 0.935 | 0.935 | 0.163 | 0.240 | 0.057 | 0.983 | 0.987 | 0.984 |
| SVM2 | 1.030 | 1.290 | 1.663 | 1.738 | 0.562 | 0.688 | 0.919 | 1.173 | 1.377 | 0.601 | 1.507 | 0.760 |
| AB2 | 0.228 | 0.522 | 0.272 | 0.998 | 0.928 | 0.928 | 0.158 | 0.258 | 0.066 | 0.981 | 1.003 | 0.981 |
| ETo, P, Kc, p, Zr | ||||||||||||
| RF3 | 0.191 | 0.311 | 0.097 | 1.016 | 0.974 | 0.975 | 0.161 | 0.226 | 0.051 | 0.985 | 0.991 | 0.986 |
| SVM3 | 0.879 | 1.130 | 1.278 | 1.517 | 0.663 | 0.753 | 0.748 | 1.010 | 1.021 | 0.704 | 1.315 | 0.798 |
| AB3 | 0.210 | 0.452 | 0.204 | 1.002 | 0.946 | 0.946 | 0.132 | 0.196 | 0.038 | 0.989 | 0.996 | 0.989 |
| ETo, P, Kc, TAW | ||||||||||||
| RF4 | 0.192 | 0.362 | 0.131 | 1.018 | 0.965 | 0.966 | 0.156 | 0.226 | 0.051 | 0.985 | 0.988 | 0.985 |
| SVM4 | 0.945 | 1.200 | 1.440 | 1.608 | 0.621 | 0.727 | 0.820 | 1.080 | 1.166 | 0.662 | 1.389 | 0.781 |
| AB4 | 0.208 | 0.444 | 0.197 | 1.002 | 0.948 | 0.948 | 0.125 | 0.171 | 0.029 | 0.992 | 1.004 | 0.992 |
| ETo, P, Kc, p, Zr, TAW | ||||||||||||
| RF5 | 0.212 | 0.407 | 0.166 | 1.000 | 0.956 | 0.956 | 0.161 | 0.239 | 0.057 | 0.983 | 0.993 | 0.984 |
| SVM5 | 0.829 | 1.077 | 1.159 | 1.448 | 0.695 | 0.771 | 0.693 | 0.953 | 0.908 | 0.737 | 1.263 | 0.812 |
| AB5 | 0.209 | 0.447 | 0.200 | 1.002 | 0.947 | 0.947 | 0.132 | 0.175 | 0.031 | 0.991 | 1.008 | 0.991 |
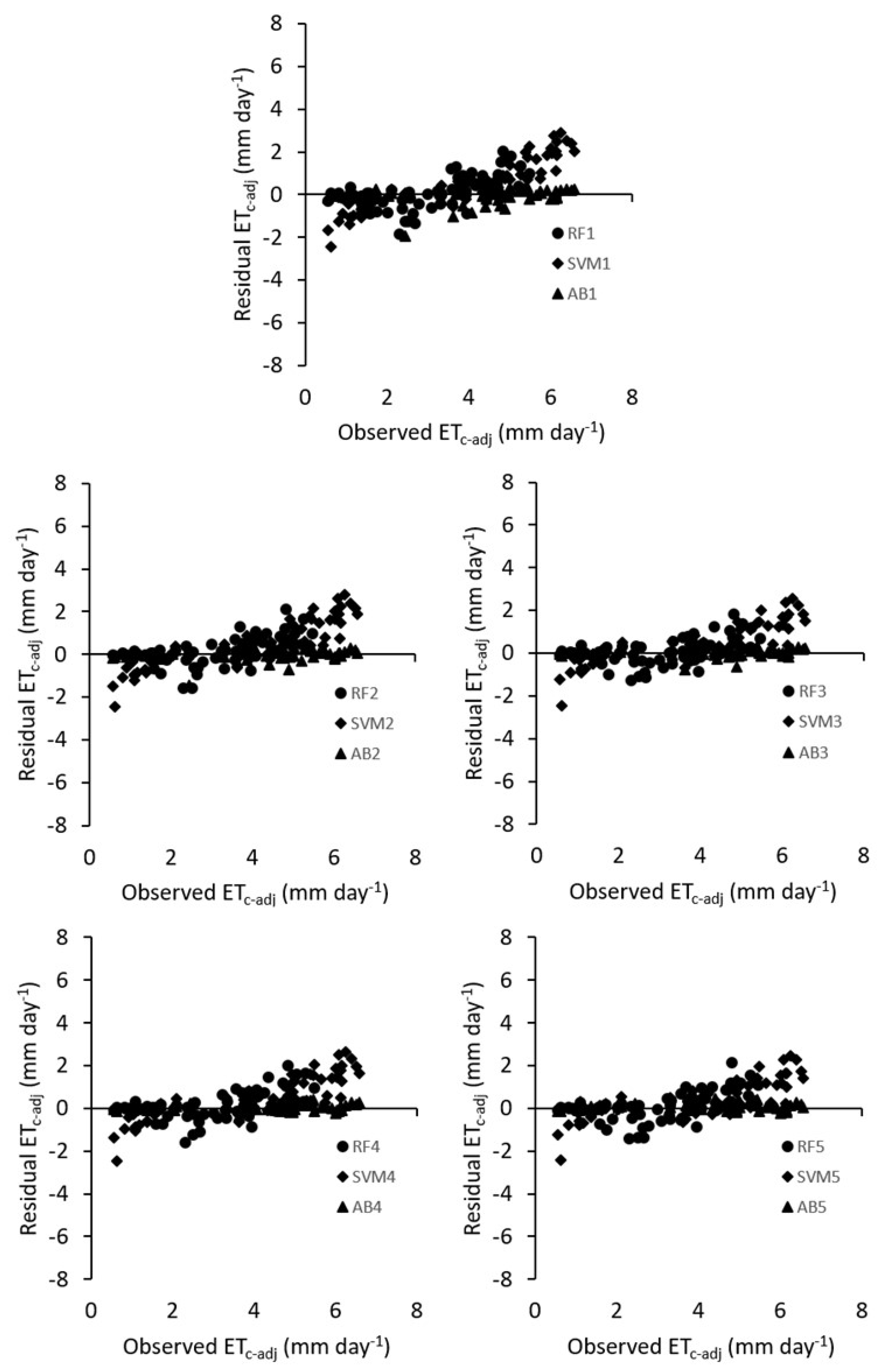
3.2.2. Performance of Machine Learning Methods under 50% of Optimal Irrigation Regime (I50)
| Input/Model | Training | Testing | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | RMSE | MSE | Slope | EF | R2 | MAE | RMSE | MSE | Slope | EF | R2 | |
| (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | |||||||
| ETo, P | ||||||||||||
| RF1 | 0.462 | 0.656 | 0.430 | 0.948 | 0.741 | 0.743 | 0.531 | 0.735 | 0.540 | 0.996 | 0.702 | 0.706 |
| SVM1 | 0.739 | 0.957 | 0.915 | 1.755 | 0.449 | 0.556 | 0.777 | 1.007 | 1.015 | 1.522 | 0.440 | 0.604 |
| AB1 | 0.527 | 0.768 | 0.589 | 0.902 | 0.645 | 0.653 | 0.548 | 0.745 | 0.555 | 0.946 | 0.694 | 0.697 |
| ETo, P, Kc | ||||||||||||
| RF2 | 0.414 | 0.623 | 0.389 | 0.964 | 0.766 | 0.767 | 0.437 | 0.648 | 0.420 | 1.019 | 0.768 | 0.777 |
| SVM2 | 0.690 | 0.906 | 0.820 | 1.557 | 0.506 | 0.585 | 0.724 | 0.947 | 0.896 | 1.389 | 0.506 | 0.637 |
| AB2 | 0.413 | 0.624 | 0.389 | 0.976 | 0.766 | 0.766 | 0.470 | 0.650 | 0.422 | 0.977 | 0.767 | 0.768 |
| ETo, P, Kc, p, Zr | ||||||||||||
| RF3 | 0.401 | 0.599 | 0.359 | 1.007 | 0.784 | 0.784 | 0.405 | 0.579 | 0.335 | 0.999 | 0.815 | 0.816 |
| SVM3 | 0.641 | 0.855 | 0.730 | 1.372 | 0.560 | 0.609 | 0.653 | 0.857 | 0.734 | 1.308 | 0.595 | 0.698 |
| AB3 | 0.406 | 0.630 | 0.397 | 0.969 | 0.761 | 0.762 | 0.447 | 0.648 | 0.419 | 1.010 | 0.769 | 0.775 |
| ETo, P, Kc, TAW | ||||||||||||
| RF4 | 0.411 | 0.610 | 0.373 | 0.967 | 0.776 | 0.777 | 0.441 | 0.653 | 0.427 | 1.007 | 0.765 | 0.772 |
| SVM4 | 0.661 | 0.874 | 0.764 | 1.447 | 0.540 | 0.602 | 0.683 | 0.896 | 0.803 | 1.317 | 0.557 | 0.665 |
| AB4 | 0.480 | 0.630 | 0.396 | 0.994 | 0.761 | 0.761 | 0.473 | 0.733 | 0.537 | 0.914 | 0.704 | 0.711 |
| ETo, P, Kc, p, Zr, TAW | ||||||||||||
| RF5 | 0.381 | 0.589 | 0.346 | 1.015 | 0.791 | 0.791 | 0.462 | 0.664 | 0.441 | 1.001 | 0.756 | 0.760 |
| SVM5 | 0.628 | 0.843 | 0.710 | 1.322 | 0.572 | 0.613 | 0.629 | 0.828 | 0.686 | 1.292 | 0.622 | 0.716 |
| AB5 | 0.426 | 0.644 | 0.414 | 0.962 | 0.750 | 0.752 | 0.454 | 0.673 | 0.453 | 0.955 | 0.750 | 0.753 |
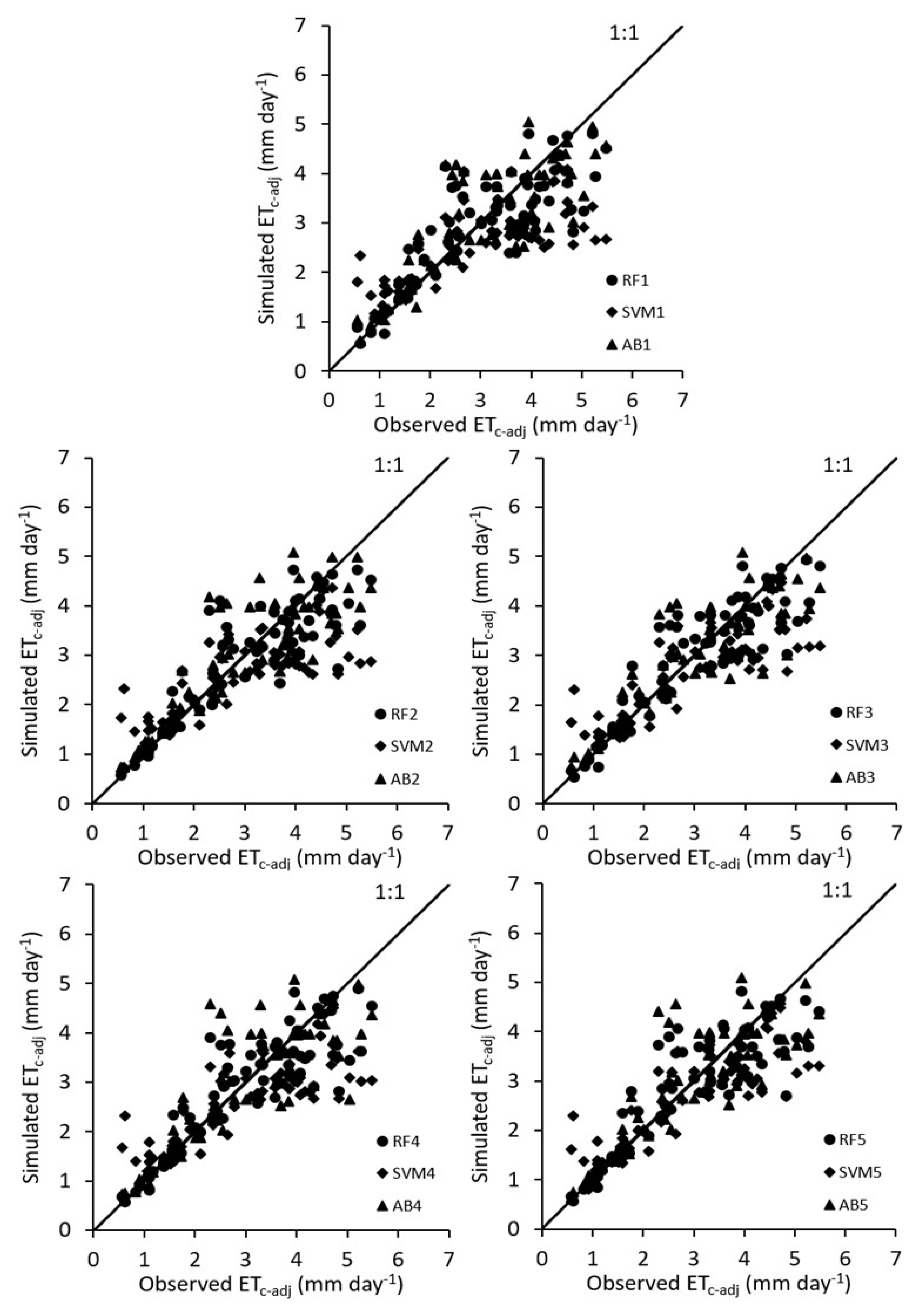
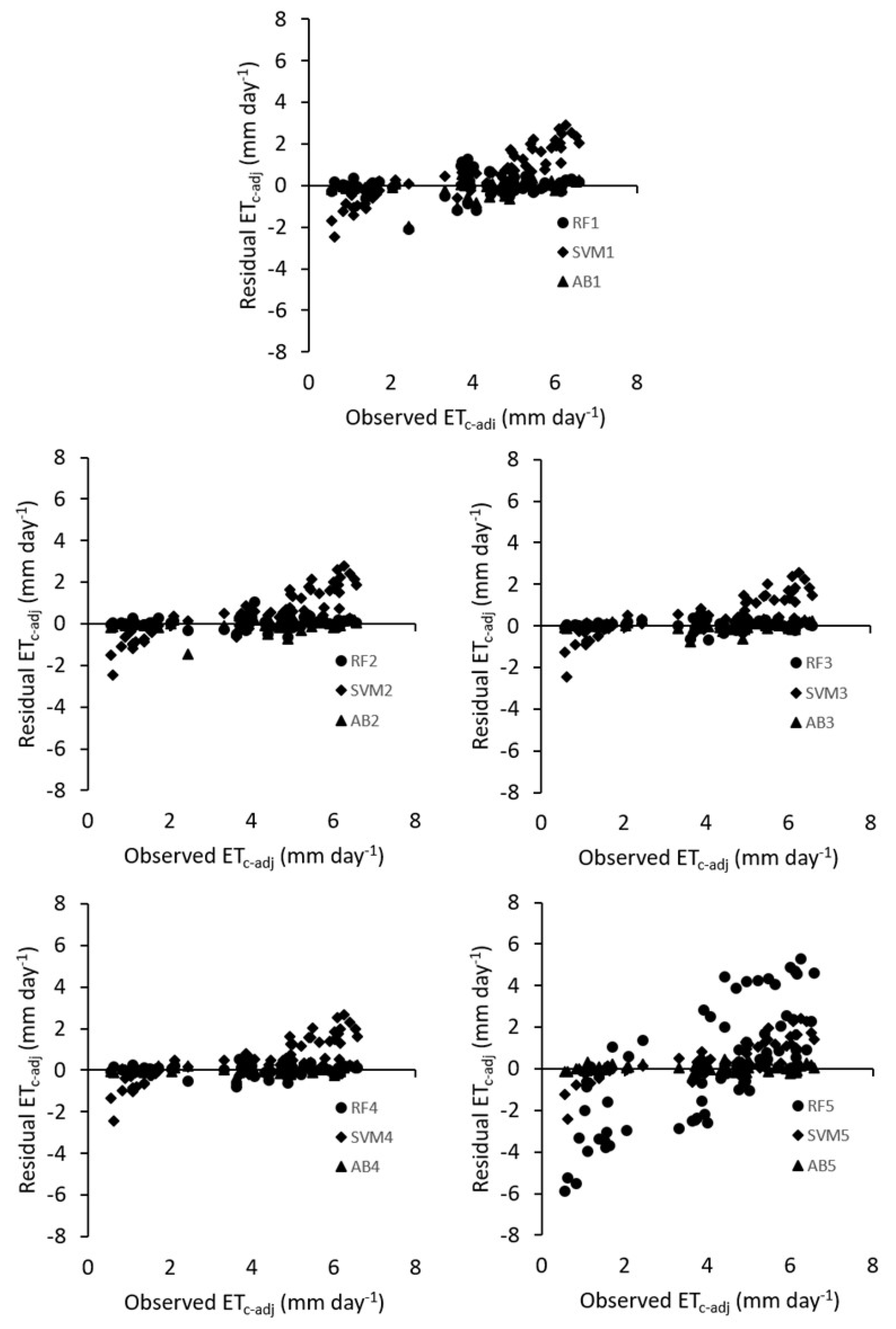
3.2.3. Performances of Machine Learning Methods under Rainfed Condition (I0)
| Input/Model | Training | Testing | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | RMSE | MSE | Slope | EF | R2 | MAE | RMSE | MSE | Slope | EF | R2 | |
| (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | (mm Day−1) | |||||||
| ETo, P | ||||||||||||
| RF1 | 0.285 | 0.409 | 0.167 | 1.159 | 0.854 | 0.870 | 0.288 | 0.420 | 0.176 | 1.053 | 0.886 | 0.889 |
| SVM1 | 0.525 | 0.755 | 0.571 | 1.933 | 0.502 | 0.661 | 0.517 | 0.744 | 0.553 | 1.768 | 0.642 | 0.844 |
| AB1 | 0.247 | 0.361 | 0.130 | 1.011 | 0.886 | 0.887 | 0.281 | 0.442 | 0.195 | 0.943 | 0.874 | 0.877 |
| ETo, P, Kc | ||||||||||||
| RF2 | 0.280 | 0.403 | 0.162 | 1.219 | 0.859 | 0.887 | 0.305 | 0.427 | 0.182 | 1.074 | 0.882 | 0.879 |
| SVM2 | 0.486 | 0.706 | 0.499 | 1.713 | 0.565 | 0.688 | 0.466 | 0.664 | 0.441 | 1.583 | 0.715 | 0.868 |
| AB2 | 0.271 | 0.437 | 0.191 | 0.995 | 0.833 | 0.834 | 0.243 | 0.354 | 0.125 | 0.975 | 0.919 | 0.920 |
| ETo, P, Kc, p, Zr | ||||||||||||
| RF3 | 0.296 | 0.488 | 0.239 | 0.977 | 0.792 | 0.793 | 0.294 | 0.459 | 0.211 | 0.958 | 0.864 | 0.874 |
| SVM3 | 0.435 | 0.636 | 0.405 | 1.494 | 0.647 | 0.730 | 0.401 | 0.557 | 0.310 | 1.397 | 0.800 | 0.898 |
| AB3 | 0.244 | 0.404 | 0.163 | 0.990 | 0.858 | 0.858 | 0.242 | 0.361 | 0.131 | 0.984 | 0.916 | 0.921 |
| ETo, P, Kc, TAW | ||||||||||||
| RF4 | 0.268 | 0.408 | 0.167 | 1.046 | 0.855 | 0.856 | 0.313 | 0.479 | 0.229 | 1.002 | 0.852 | 0.865 |
| SVM4 | 0.456 | 0.667 | 0.445 | 1.579 | 0.612 | 0.711 | 0.432 | 0.606 | 0.367 | 1.474 | 0.763 | 0.883 |
| AB4 | 0.225 | 0.389 | 0.151 | 0.999 | 0.868 | 0.868 | 0.261 | 0.406 | 0.165 | 0.977 | 0.893 | 0.900 |
| ETo, P, Kc, p, Zr, TAW | ||||||||||||
| RF5 | 0.293 | 0.469 | 0.220 | 1.025 | 0.808 | 0.809 | 0.273 | 0.397 | 0.157 | 1.036 | 0.898 | 0.906 |
| SVM5 | 0.418 | 0.612 | 0.375 | 1.433 | 0.673 | 0.744 | 0.380 | 0.525 | 0.275 | 1.342 | 0.822 | 0.904 |
| AB5 | 0.247 | 0.423 | 0.179 | 0.977 | 0.844 | 0.844 | 0.241 | 0.359 | 0.129 | 0.972 | 0.917 | 0.922 |
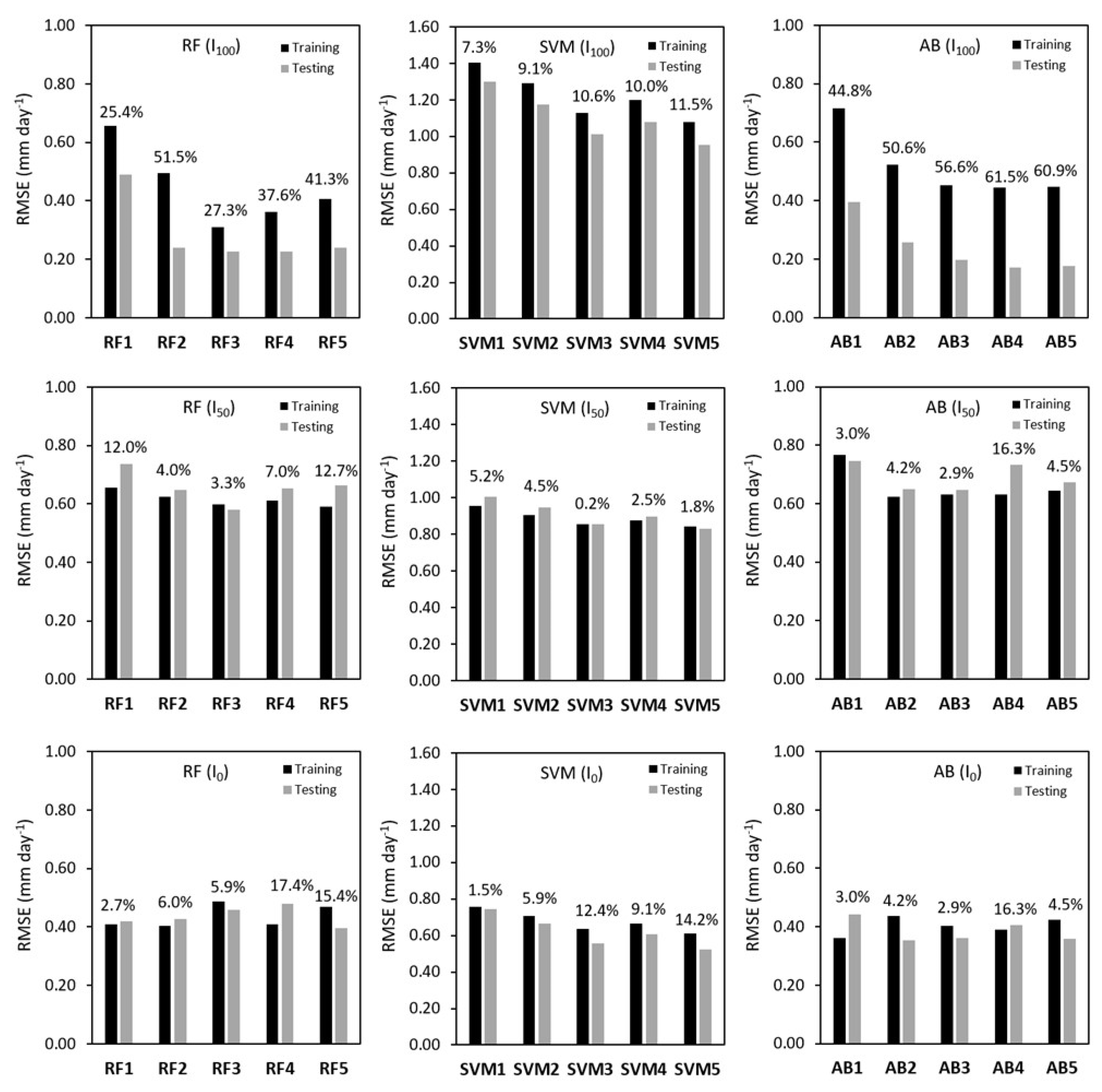
3.3. Assessment of Stability of Machine Learning Methods under Different Irrigation Regimes
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fader, M.; Giupponi, C.; Burak, S.; Dakhlaoui, H.; Koutroulis, A.; Lange, M.A.; Llasat, M.C.; Pulido-Velazquez, D.; Sanz-Cobeña, A. Water. In Climate and Environmental Change in the Mediterranean Basin—Current Situation and Risks for the Future. First Mediterranean Assessment Report; Cramer, W., Guiot, J., Marini, K., Eds.; Union for the Mediterranean; Plan Bleu; UNEP/MAP: Marseille, France, 2020; pp. 181–236. [Google Scholar]
- Savin, R.; Cossani, C.M.; Dahan, R.; Ayad, J.Y.; Albrizio, R.; Todorovic, M.; Karrou, M.; Slafer, G.A. Intensifying cereal management in dryland Mediterranean agriculture: Rainfed wheat and barley responses to nitrogen fertilisation. Eur. J. Agron. 2022, 137, 126518. [Google Scholar]
- Gao, Z.Z.; Wang, C.; Zhao, J.C. Adopting different irrigation and nitrogen management based on precipitation year types balances winter wheat yields and greenhouse gas emissions. Field Crops Res. 2022, 280, 108484. [Google Scholar] [CrossRef]
- Todorovic, M.; Jovanovic, N. Climate change and Agriculture. In Encyclopedia of Water: Science, Technology, and Society; Maurice, P.A., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2019; Volume 209, pp. 2463–2478. [Google Scholar]
- Core Writing Team; Lee, H.; Romero, J. (Eds.) IPCC Climate Change 2023: Synthesis Report. In Contribution of Working Groups I, II and III to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2023; pp. 35–115. [Google Scholar]
- Cramer, W.; Guiot, J.; Marini, K. (Eds.) MedECC Climate and Environmental Change in the Mediterranean Basin—Current Situation and Risks for the Future. In First Mediterranean Assessment Report; Union for the Mediterranean; Plan Bleu; UNEP/MAP: Marseille, France, 2020; Volume 632, ISBN 978-2-9577416-0-1. [Google Scholar]
- Tanasijevic, L.; Todorovic, M.; Pereira, L.S.; Pizzigalli, C.; Lionello, P. Impacts of climate change on olive crop evapotranspiration and irrigation requirements in the Mediterranean region. Agric. Water Manag. 2014, 144, 54–68. [Google Scholar]
- Saadi, S.; Todorovic, M.; Tanasijevic, L.; Pereira, L.S.; Pizzigalli, C.; Lionello, P. Climate change and Mediterranean agriculture: Impacts on winter wheat and tomato crop evapotranspiration, irrigation requirements and yield. Agric. Water Manag. 2015, 147, 103–115. [Google Scholar] [CrossRef]
- Knezevic, M.; Zivotic, L.; Cerekovic, N.; Topalovic, A.; Kokovic, N.; Todorovic, M. Impact of climate change on water requirements and growth of potato in different climatic zones of Montenegro. J. Water Clim. Chang. 2018, 9, 657–671. [Google Scholar]
- Todorovic, M. Climate Change and Mediterranean agriculture: Expected impacts, possible solutions and the way forward. In Crises Et Conflits En Méditerranée: L’agriculture Comme Résilience; Lacirignola, C., Ed.; La Bibliothèque de l’iReMMO (Institut De Recherche Et D’études Méditerranée Moyen-Orient); L’Harmattan: Paris, France, 2018; pp. 13–28. [Google Scholar]
- Yang, X.; Li, Z.; Cui, S.; Cao, Q.; Deng, J.; Lai, X.; Shen, Y. Cropping system productivity and evapotranspiration in the semiarid Loess Plateau of China under future temperature and precipitation changes: An APSIM-based analysis of rotational vs. continuous systems. Agric. Water Manag. 2020, 229, 105959. [Google Scholar] [CrossRef]
- Jovanovic, N.; Pereira, L.S.; Paredes, P.; Pôças, I.; Cantore, V.; Todorovic, M. A review of strategies, methods and technologies to reduce non-beneficial consumptive water use on farms considering the FAO56 methods. Agric. Water Manag. 2020, 239, 106267. [Google Scholar]
- Farrell, A.D.; Deryng, D.; Neufeldt, H. Modelling adaptation and transformative adaptation in cropping systems: Recent advances and future directions. Curr. Opin. Environ. Sustain. 2023, 61, 101265. [Google Scholar] [CrossRef]
- Dettori, M.; Cesaraccio, C.; Duce, P. Simulation of climate change impacts on production and phenology of durum wheat in Mediterranean environments using CERES-Wheat model. Field Crops Res. 2017, 206, 43–53. [Google Scholar]
- Fabeiro, C.; Martin de Santa Olalla, F.; de Juan, J.A. Yield and size of deficit irrigated potatoes. Agric. Water Manag. 2001, 48, 255–266. [Google Scholar] [CrossRef]
- Ali, S.; Xu, Y.Y.; Jia, Q.M.; Ma, X.C.; Ahmad, I.; Adnan, M.; Gerard, R.; Ren, X.L.; Zhang, P.; Cai, T.; et al. Interactive effects of plastic film mulching with supplemental irrigation on winter wheat photosynthesis, chlorophyll fluorescence and yield under simulated precipitation conditions. Agric. Water Manag. 2018, 207, 1–14. [Google Scholar] [CrossRef]
- Wang, J.; Ghimire, R.; Fu, X.; Sainju, U.M.; Liu, W. Straw mulching increases precipitation storage rather than water use efficiency and dryland winter wheat yield. Agric. Water Manag. 2018, 106, 95–101. [Google Scholar]
- Candido, V.; Cantore, V.; Castronuovo, D.; Denora, M.; Schiattone, M.I.; Sergio, L.; Todorovic, M.; Boari, F. Effect of Water Regime, Nitrogen Level, and Biostimulant Application on the Water and Nitrogen Use Efficiency of Wild Rocket [Diplotaxis tenuifolia (L.) DC]. Agronomy 2023, 13, 507. [Google Scholar]
- Van Oosten, M.J.; Pepe, O.; De Pascale, S.; Silletti, S.; Maggio, A. The role of biostimulants and bioeffectors as alleviators of abiotic stress in crop plants. Chem. Biol. Technol. Agric. 2017, 4, 5. [Google Scholar]
- Caradonia, F.; Ronga, D.; Tava, A.; Francia, E. Plant Biostimulants in Sustainable Potato Production: An Overview. Potato Res. 2022, 65, 83–104. [Google Scholar]
- Schiattone, M.I.; Boari, F.; Cantore, V.; Castronuovo, D.; Denora, M.; Di Venere, D.; Perniola, M.; Sergio, L.; Todorovic, M.; Candido, V. Effect of water regime, nitrogen level and biostimulants application on yield and quality traits of wild rocket [Diplotaxis tenuifolia (L.) DC.]. Agric. Water Manag. 2023, 277, 108078. [Google Scholar]
- El Boukhari, M.E.M.; Barakate, M.; Bouhia, Y.; Lyamlouli, K. Trends in seaweed extract based biostimulants: Manufacturing process and beneficial effect on soil-plant systems. Plants 2020, 9, 359. [Google Scholar] [CrossRef]
- Abi Saab, M.T.; Jomaa, I.; Skaf, S.; Fahed, S.; Todorovic, M. Assessment of a Smartphone Application for Real-Time Irrigation Scheduling in Mediterranean Environments. Water 2019, 11, 252. [Google Scholar]
- FAO Crops [WWW Document]. Available online: http://www.fao.org/faostat (accessed on 1 December 2023).
- Cantore, V.; Wassar, F.; Yamaç, S.S.; Sellami, M.H.; Albrizio, R.; Stellacci, A.M.; Todorovic, M. Yield and water use efficiency of early potato grown under different irrigation regimes. Int. J. Plant Prod. 2014, 8, 409–428. [Google Scholar]
- Mattar, M.A.; El-Abedin, T.K.Z.; Al-Ghobari, H.M.; Alazba, A.A.; Elansary, H.O. Effects of different surface and subsurface drip irrigation levels on growth traits, tuber yield, and irrigation water use efficiency of potato crop. Irrig. Sci. 2021, 39, 517–533. [Google Scholar]
- Jefferies, R.A. Physiology of crop response to drought. In Potato Ecology and Modelling of Crops under Conditions Limiting Growth, Proceedings of the Second International Potato Modeling Conference, Wageningen, The Netherlands, 17–19 May 1994; Haverkort, A.J., MacKerron, D.K.L., Eds.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1994; pp. 61–74. [Google Scholar]
- Quiroz, R.; Chujoy, E.; Mares, V. Potato. In Crop Yield Response to Water; Steduto, P., Hsiao, T., Fereres, E., Raes, D., Eds.; FAO Irrigation and Drainage Papers No. 66; FAO: Rome, Italy, 2012; pp. 184–189. [Google Scholar]
- Trifonov, P.; Lazarovitch, N.; Arye, G. Increasing water productivity in arid regions using low-discharge drip irrigation: A case study on potato growth. Irrig. Sci. 2017, 35, 287–295. [Google Scholar] [CrossRef]
- Jefferies, R.A.; MacKerron, D.K.L. Response of potato genotypes to drought. II. Leaf area index, growth and yield. Ann. Biol. 1993, 122, 105–112. [Google Scholar] [CrossRef]
- Shock, C.C.; Feibert, E.B.G.; Saunders, L.D. Potato yield and quality response to deficit irrigation. Hortic. Sci. 1998, 33, 655–659. [Google Scholar] [CrossRef]
- Onder, S.; Caliskan, M.E.; Onder, D.; Caliskan, S. Different irrigation methods and water stress effects on potato yield and yield components. Agric. Water Manag. 2005, 73, 73–86. [Google Scholar]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration: Guidel Lines for Computing Crop Evapotranspiration; FAO Irrigation and Drainage Paper No. 56; FAO: Rome, Italy, 1998. [Google Scholar]
- Todorovic, M. Crop Evapotranspiration. In Encyclopedia of Water: Science, Technology, and Society; Maurice, P.A., Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2019; Volume 156, pp. 1697–1712. [Google Scholar]
- Egipto, R.; Aquino, A.; Costa, J.M.; Andújar, J.M. Predicting crop evapotranspiration under non-standard conditions using machine learning algorithms, a case study for Vitis vinifera L. cv Tempranillo. Agronomy 2023, 13, 2463. [Google Scholar] [CrossRef]
- Lu, Y.; Li, T.; Hu, H.; Zeng, X. Short-term prediction of reference crop evapotranspiration based on machine learning with different decomposition methods in arid areas of China. Agric. Water Manag. 2023, 279, 108175. [Google Scholar] [CrossRef]
- Wu, Z.; Cui, N.; Gong, D.; Zhu, F.; Xing, L.; Zhu, B.; Chen, X.; Wen, S.; Liu, Q. Simulation of daily maize evapotranspiration at different growth stages using four machine learning models in semi-humid regions of northwest China. J. Hydrol. 2023, 617, 128947. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, L.; Zhu, G.; Cheng, C.; He, J.; Traore, S.; Singh, V.P. Exploring interpretable and non-interpretable machine learning models for estimating winter wheat evapotranspiration using particle swarn optimization with limited climatic data. Comput. Electron. Agric. 2023, 212, 108140. [Google Scholar] [CrossRef]
- Stoffer, R.; Hartogensis, O.; Rodríguez, J.C.; van Heerwaarden, C. Machine-learned actual evapotranspiration for an irrigated pecan orchard in Northwest Mexico. Agric. Forest Meteorol. 2024, 345, 109825. [Google Scholar] [CrossRef]
- Ferreira, L.B.; da Cunha, F.F.; de Oliveira, R.A.; Fernandes Filho, E.I. Estimation of reference evapotranspiration in Brazil with limited meteorological data using ANN and SVM—A new approach. J. Hydrol. 2019, 572, 556–570. [Google Scholar] [CrossRef]
- Wu, L.; Zhou, H.; Ma, X.; Fan, J.; Zhang, F. Daily reference evapotranspiration prediction based on hybridized extreme learning machine model with bio-inspired optimization algorithms: Application in contrasting climates of China. J. Hydrol. 2019, 577, 123960. [Google Scholar] [CrossRef]
- Mehdizadeh, S.; Mohammadi, B.; Pham, Q.B.; Duan, Z. Development of Boosted Machine Learning Models for Estimating Daily Reference Evapotranspiration and Comparison with Empirical Approaches. Water 2021, 13, 3489. [Google Scholar] [CrossRef]
- Chia, M.Y.; Huang, Y.F.; Koo, C.H. Resolving data-hungry nature of machine learning reference evapotranspiration estimating models using inter-model ensembles with various data management schemes. Agric. Water Manag. 2022, 261, 107343. [Google Scholar] [CrossRef]
- Farooque, A.A.; Afzaal, H.; Abbas, F.; Bos, M.; Maqsood, J.; Wang, X.; Hussain, N. Forecasting daily evapotranspiration using artificial neural networks for sustainable irrigation scheduling. Irrig. Sci. 2022, 40, 55–69. [Google Scholar]
- Yamaç, S.S. Artificial intelligence methods reliably predict crop evapotranspiration with different combinations of meteorological data for sugar beet in a semiarid area. Agric. Water Manag. 2021, 254, 106968. [Google Scholar] [CrossRef]
- Saggi, M.K.; Jain, S. Application of fuzzy-genetic and regularization random forest (FG-RRF): Estimation of crop evapotranspiration (ETc) for maize and wheat crops. Agric. Water Manag. 2020, 229, 105907. [Google Scholar]
- Chen, Z.; Sun, S.; Wang, Y.; Wang, Q.; Zhang, X. Temporal convolution-network-based models for modeling maize evapotranspiration under mulched drip irrigation. Comput. Electron. Agric. 2020, 169, 105206. [Google Scholar] [CrossRef]
- Feng, Y.; Gong, D.; Mei, X.; Cui, N. Estimation of maize evapotranspiration using extreme learning machine and generalized regression neural network on the China Loess Plateau. Hydrol. Res. 2016, 48, 1156–1168. [Google Scholar] [CrossRef]
- Aghajanloo, M.B.; Sabziparvar, A.A.; Talaee, P.H. Artifical neural network-genetic algorithm for estimation of crop evapotranspiration in a semi-arid region of Iran. Neural. Comput. Appl. 2013, 23, 1387–1393. [Google Scholar] [CrossRef]
- Smith, M. The application of climate data for planning and management of sustainable rainfed and irrigated crop production. Agric. Forest Meteorol. 2000, 103, 99–108. [Google Scholar] [CrossRef]
- Alexandris, S.; Kerkides, P.; Liakatas, A. Daily reference evapotranspiration estimates by the “Copais” approach. Agric. Water Manag. 2006, 82, 371–386. [Google Scholar] [CrossRef]
- Pereira, L.S.; Allen, R.G.; Smith, M.; Raes, D. Crop evapotranspiration estimation with FAO56: Past and future. Agric. Water Manag. 2015, 147, 4–20. [Google Scholar] [CrossRef]
- Yamaç, S.S.; Todorovic, M. Estimation of daily potato crop evapotranspiration using three different machine-learning algorithms and four scenarios of available meteorological data. Agric. Water Manag. 2020, 228, 105875. [Google Scholar] [CrossRef]
- Kottek, M.; Grieser, J.; Beck, C.; Rudolf, B.; Rubel, F. World map of the köppen-geiger climate classification updated. Meteorol. Z. 2006, 15, 259–263. [Google Scholar] [CrossRef]
- Ierna, A. Tuber yield and quality characteristics of potatoes for off-season crops in a Mediterranean environment. J. Sci. Food Agric. 2010, 90, 85–90. [Google Scholar] [CrossRef]
- Todorovic, M. An Excel-based tool for real time irrigation management at field scale. In Proceedings of the International Symposium on “Water and Land Management for Sustainable Irrigated Agriculture”, Adana, Turkey, 4–8 April 2006. [Google Scholar]
- Qiu, Y.; Fu, B.; Wang, J.; Chen, L. Soil moisture variation in relation to topography and land use in a hillslope catchment of the Loess Plateau. China J. Hydrol. 2001, 240, 243–263. [Google Scholar] [CrossRef]
- Liu, Y.; Pereira, L.S.; Fernando, R.M. Fluxes through the bottom boundary of the root zone in silt soils: Parametric approaches to estimate groundwater contribution and percolation. Agric. Water Manag. 2006, 84, 27–40. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Vapnik, V. Support vector machine. Mach. Learn. 1995, 20, 273–297. [Google Scholar]
- Wu, X.; Kumar, V.; Ross Quinlan, J.; Ghosh, J.; Yang, Q.; Motoda, H.; McLachlan, G.J.; Nh, A.; Liu, B.; Yu, P.S.; et al. Top 10 algorithms in data mining. Knowl. Inf. Syst. 2008, 14, 1–37. [Google Scholar] [CrossRef]
- Chen, J.L.; Liu, H.B.; Wu, W.; Xie, D.T. Estimation of monthly solar radiation from measured temperatures using support vector machines—A case study. Renew. Energy 2011, 36, 413–420. [Google Scholar] [CrossRef]
- Shrestha, N.K.; Shukla, S. Support vector machine based modeling of evapotranspiration using hydro-climatic variables in a sub-tropical environment. Agric. Forest Meteorol. 2015, 200, 172–184. [Google Scholar] [CrossRef]
- Karimi, Y.; Prasher, O.S.; Patel, R.M.; Kim, M.R.H.S. Application of support vector machine technology for weed and nitrogen stress detection in corn. Comput. Electron. Agric. 2006, 51, 99–109. [Google Scholar] [CrossRef]
- Fan, J.; Yue, W.; Wu, L.; Zhang, F.; Cai, H.; Wang, X.; Lu, X.; Xiang, Y. Evaluation of SVM, ELM and four tree-based ensemble models for predicting daily reference evapotranspiration using limited meteorological data in different climates of China. Agric. Forest Meteorol. 2018, 263, 225–241. [Google Scholar]
- Tang, D.; Feng, Y.; Gong, D.; Hao, W.; Cui, N. Evaluation of artificial intelligence models for actual crop evapotranspiration modeling in mulched and non-mulched maize croplands. Comput. Electron. Agric. 2018, 152, 375–384. [Google Scholar] [CrossRef]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Freund, Y.; Schapire, R.E. A decision-theoretic generalization of on-line learning and an application to boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef]
- Ferreira, L.B.; da Cunha, F.F.; Fernandes Filho, E.I. Exploring machine learning and multi-task learning to estimate meteorological data and reference evapotranspiration across Brazil. Agric. Water Manag. 2022, 259, 107281. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine-learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- Hassan, M.A.; Khalil, A.; Kaseb, S.; Kassem, M.A. Exploring the potential of tree-based ensemble methods in solar radiation modeling. Appl. Energy 2017, 203, 897–916. [Google Scholar] [CrossRef]

| T | Rn | RH | U2 | P | |
|---|---|---|---|---|---|
| °C | MJ m−2 | % | m s−1 | Mm | |
| Year | |||||
| 2009 | 18.4 | 23.0 | 65.8 | 0.9 | 272.2 |
| 2010 | 16.2 | 19.8 | 67.5 | 1.2 | 170.8 |
| 2009 | Lenght of Growth Stages (Day) | 2010 | Lenght of Growth Stages (Day) | |
|---|---|---|---|---|
| Crop growth stages | ||||
| Initial | 17 March–10 April | 24 | 3 March–26 March | 24 |
| Crop development | 11 April–17 May | 37 | 27 March–11 May | 45 |
| Mid-season | 18 May–13 June | 27 | 12 May–8 June | 28 |
| Late season | 14 June–10 July | 27 | 9 June–23 June | 15 |
| Model | Climate Data | Crop Data | Soil Data | |||
|---|---|---|---|---|---|---|
| ETo | P | Kc | p | Zr | TAW | |
| RF1 | √ | √ | ||||
| RF2 | √ | √ | √ | |||
| RF3 | √ | √ | √ | √ | √ | |
| RF4 | √ | √ | √ | √ | ||
| RF5 | √ | √ | √ | √ | √ | √ |
| SVM1 | √ | √ | ||||
| SVM2 | √ | √ | √ | |||
| SVM3 | √ | √ | √ | √ | √ | |
| SVM4 | √ | √ | √ | √ | ||
| SVM5 | √ | √ | √ | √ | √ | √ |
| AB1 | √ | √ | ||||
| AB2 | √ | √ | √ | |||
| AB3 | √ | √ | √ | √ | √ | |
| AB4 | √ | √ | √ | √ | ||
| AB5 | √ | √ | √ | √ | √ | √ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamaç, S.S.; Kurtuluş, B.; Memon, A.M.; Alomair, G.; Todorovic, M. Are Supervised Learning Methods Suitable for Estimating Crop Water Consumption under Optimal and Deficit Irrigation? Agronomy 2024, 14, 532. https://doi.org/10.3390/agronomy14030532
Yamaç SS, Kurtuluş B, Memon AM, Alomair G, Todorovic M. Are Supervised Learning Methods Suitable for Estimating Crop Water Consumption under Optimal and Deficit Irrigation? Agronomy. 2024; 14(3):532. https://doi.org/10.3390/agronomy14030532
Chicago/Turabian StyleYamaç, Sevim Seda, Bedri Kurtuluş, Azhar M. Memon, Gadir Alomair, and Mladen Todorovic. 2024. "Are Supervised Learning Methods Suitable for Estimating Crop Water Consumption under Optimal and Deficit Irrigation?" Agronomy 14, no. 3: 532. https://doi.org/10.3390/agronomy14030532
APA StyleYamaç, S. S., Kurtuluş, B., Memon, A. M., Alomair, G., & Todorovic, M. (2024). Are Supervised Learning Methods Suitable for Estimating Crop Water Consumption under Optimal and Deficit Irrigation? Agronomy, 14(3), 532. https://doi.org/10.3390/agronomy14030532