
Single Plant Fertilization Using a Robotic Platform in an Organic Cropping Environment

 , ,
, ,  ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
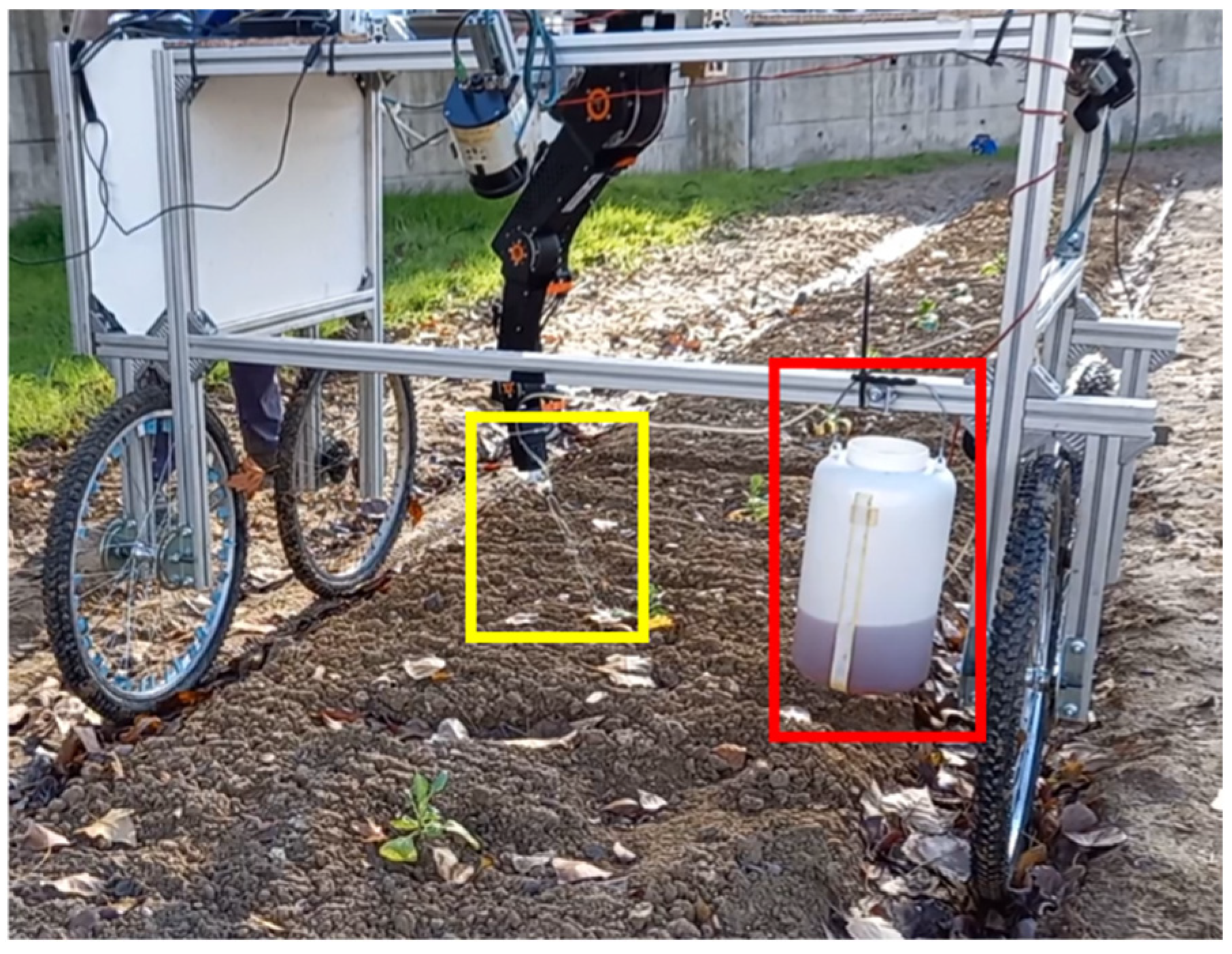
2.1. Mobile Structure
2.2. Sensory System
2.3. Sensing Algorithms
2.4. Robotic Arm
2.5. Fertilization System
2.6. Experimental Field and Crop
3. Results and Discussion
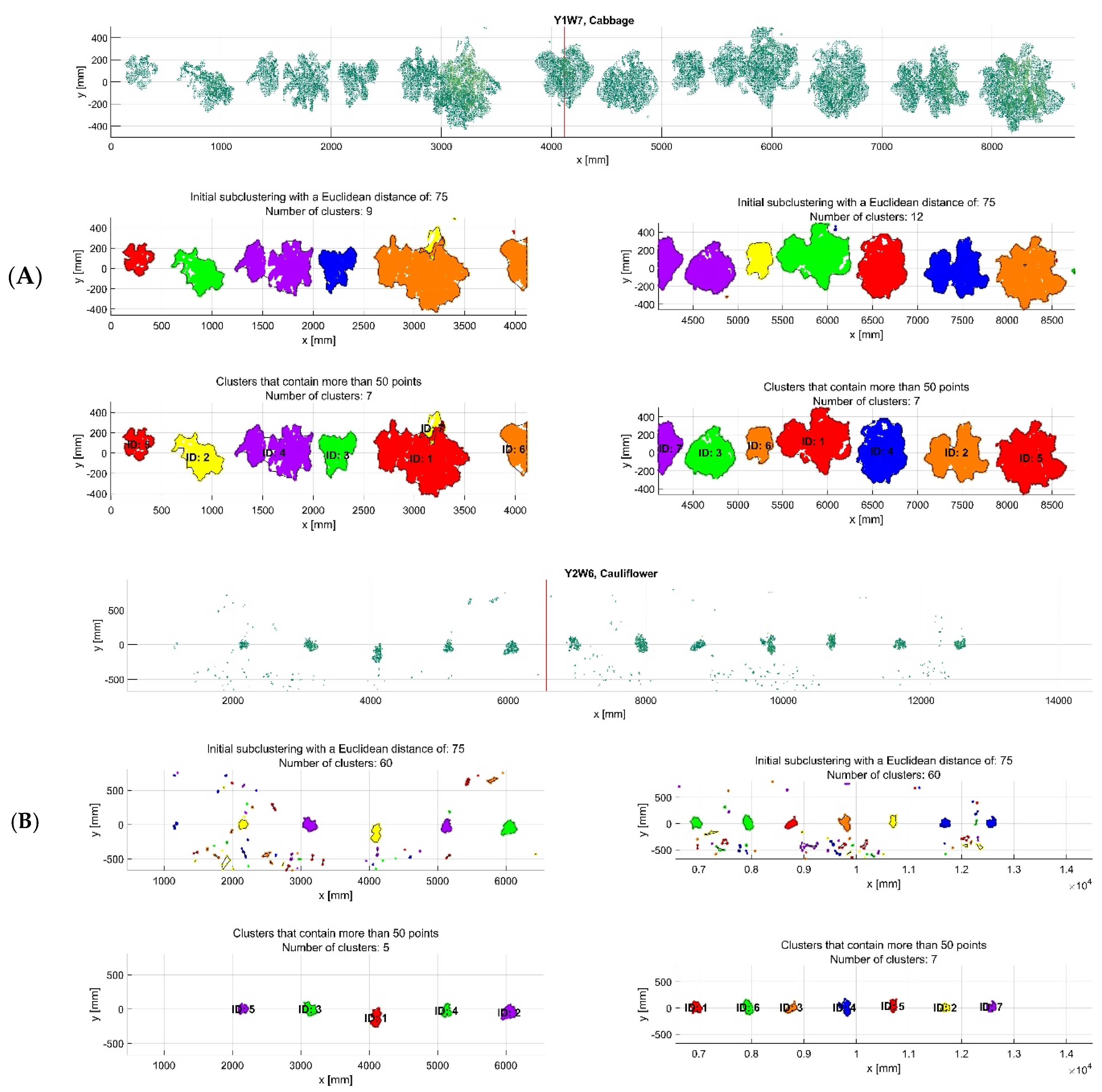
3.1. Multi-Spectral Sensing
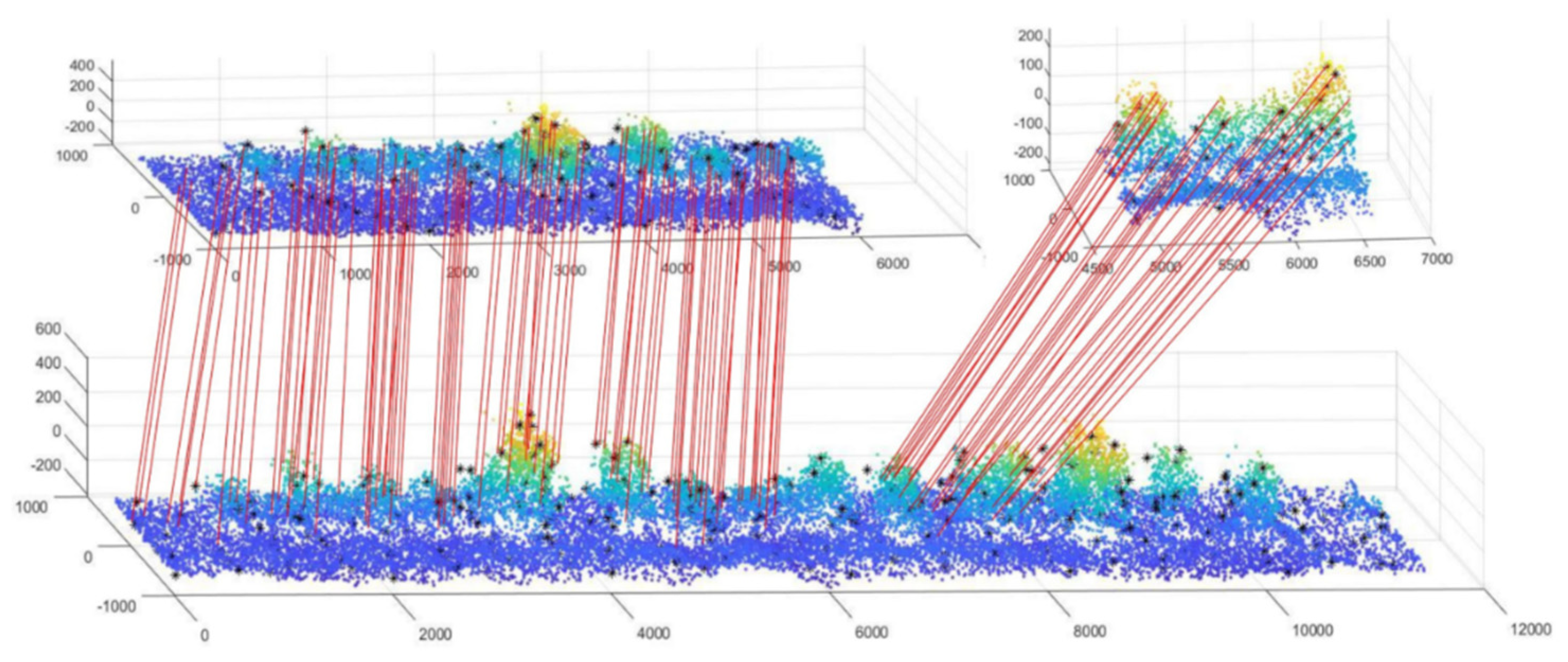
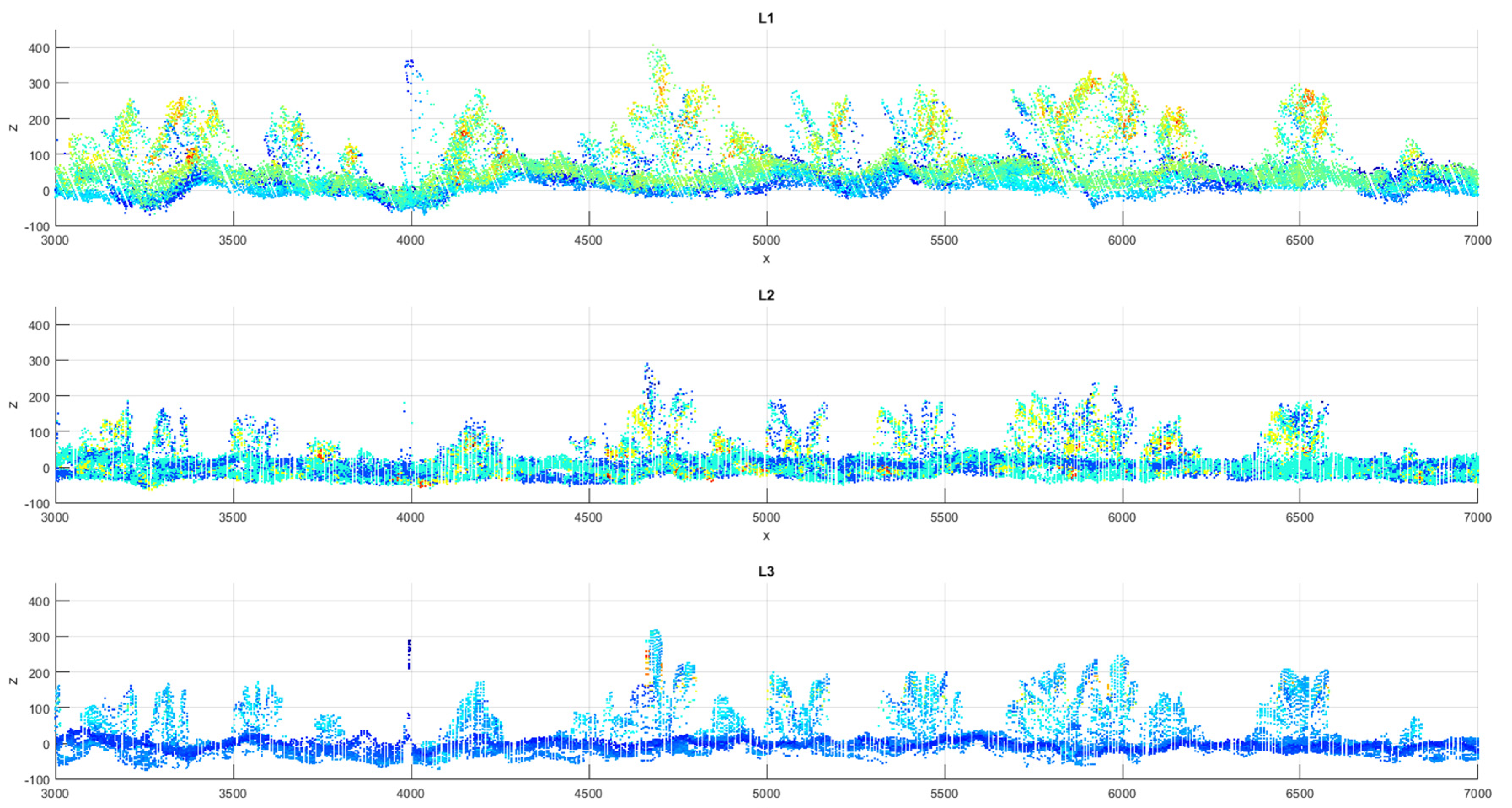
3.2. Three-Dimensional (3D) Sensing
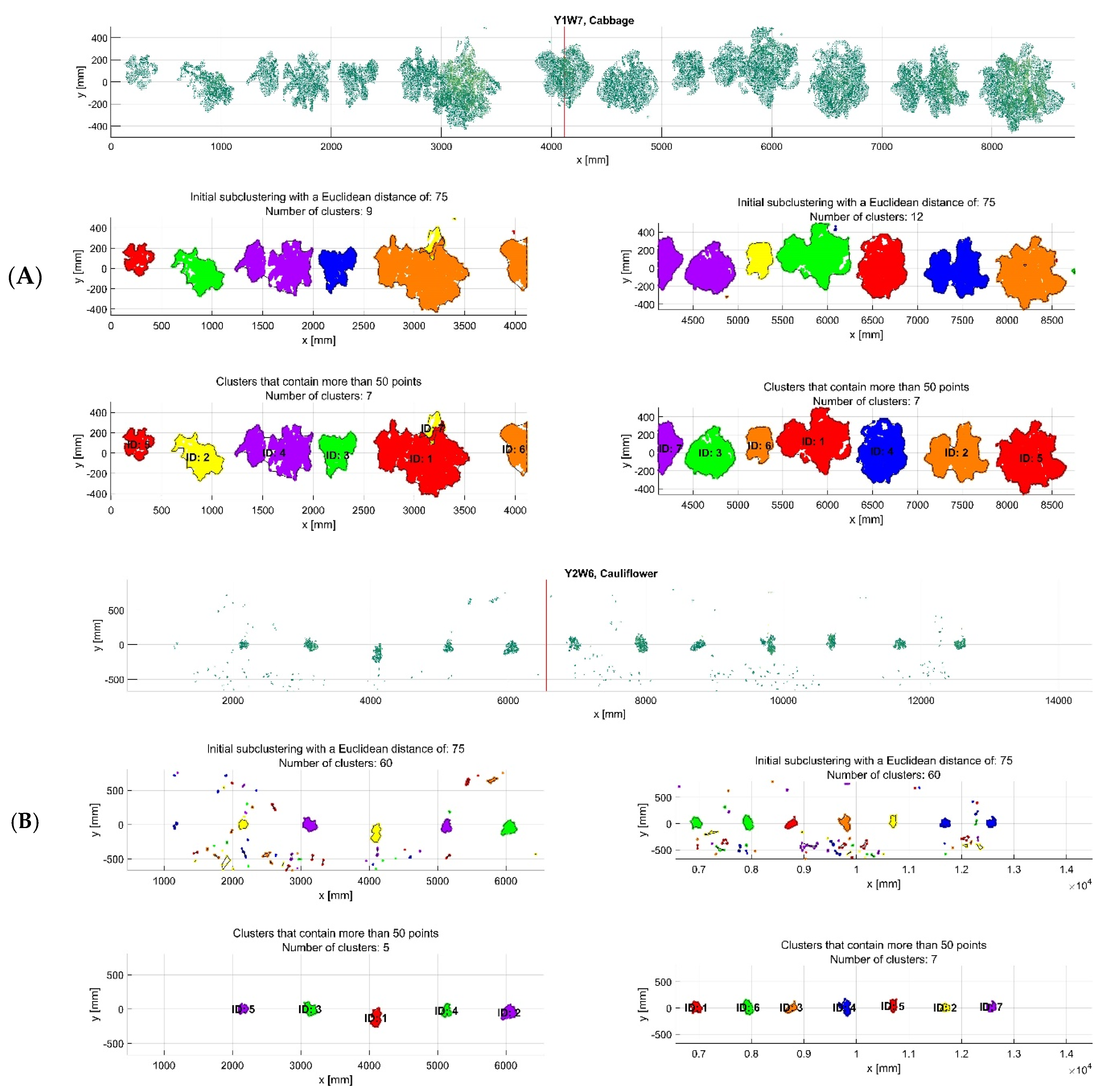
3.3. Combination of Multi-Spectral and Three-Dimensional Analysis
3.4. Actuation
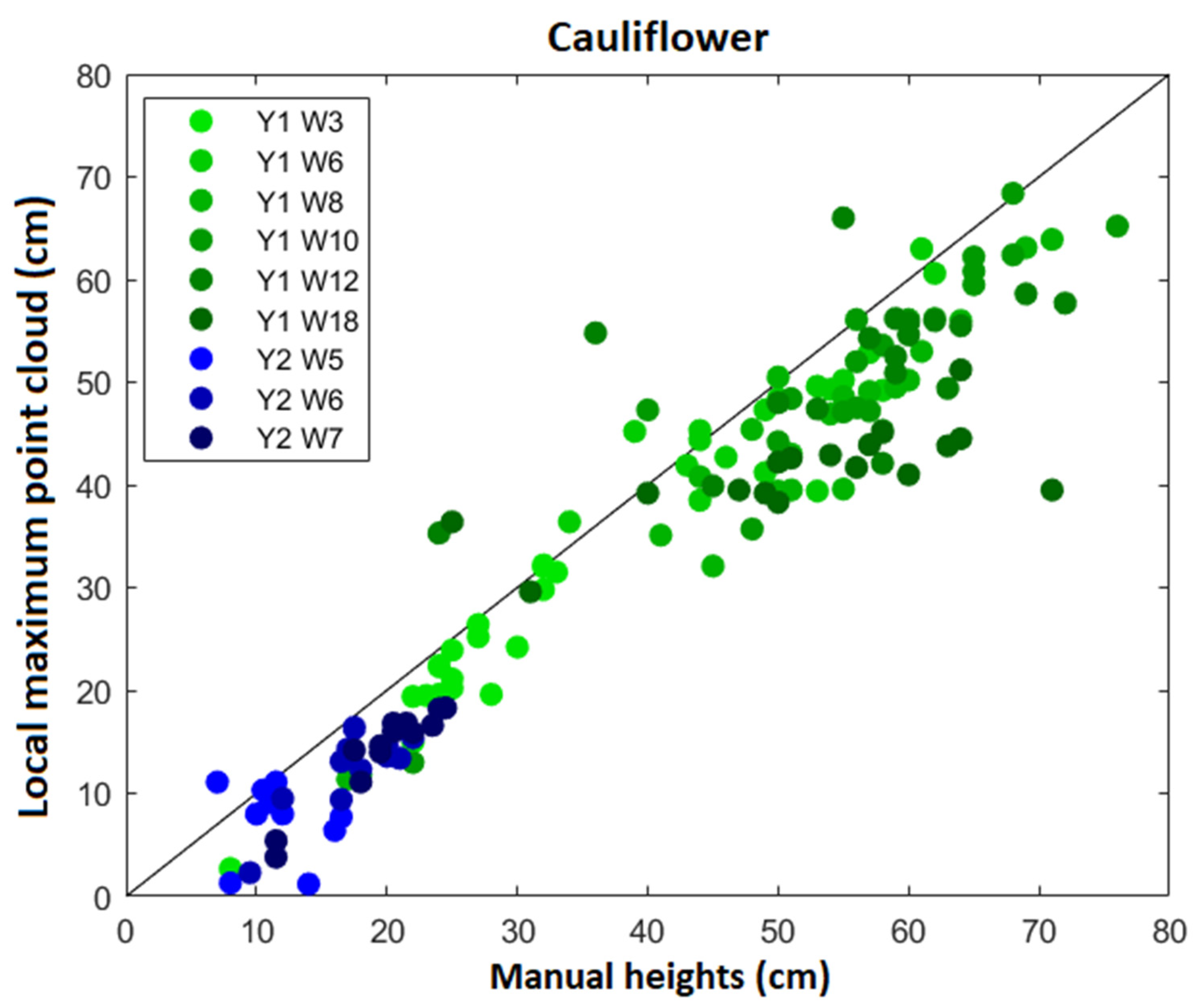
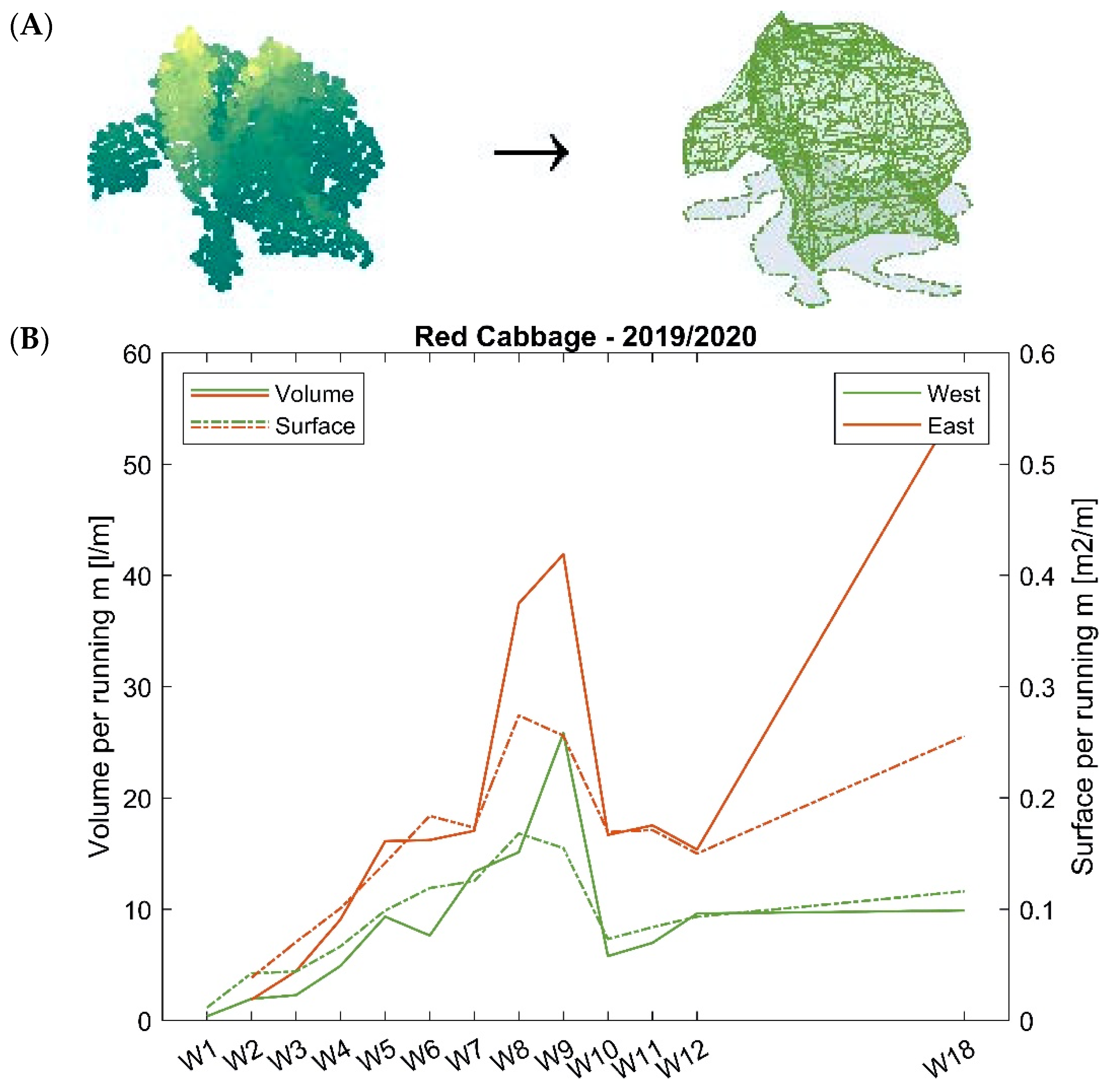
3.4.1. Geometrical Characterisation
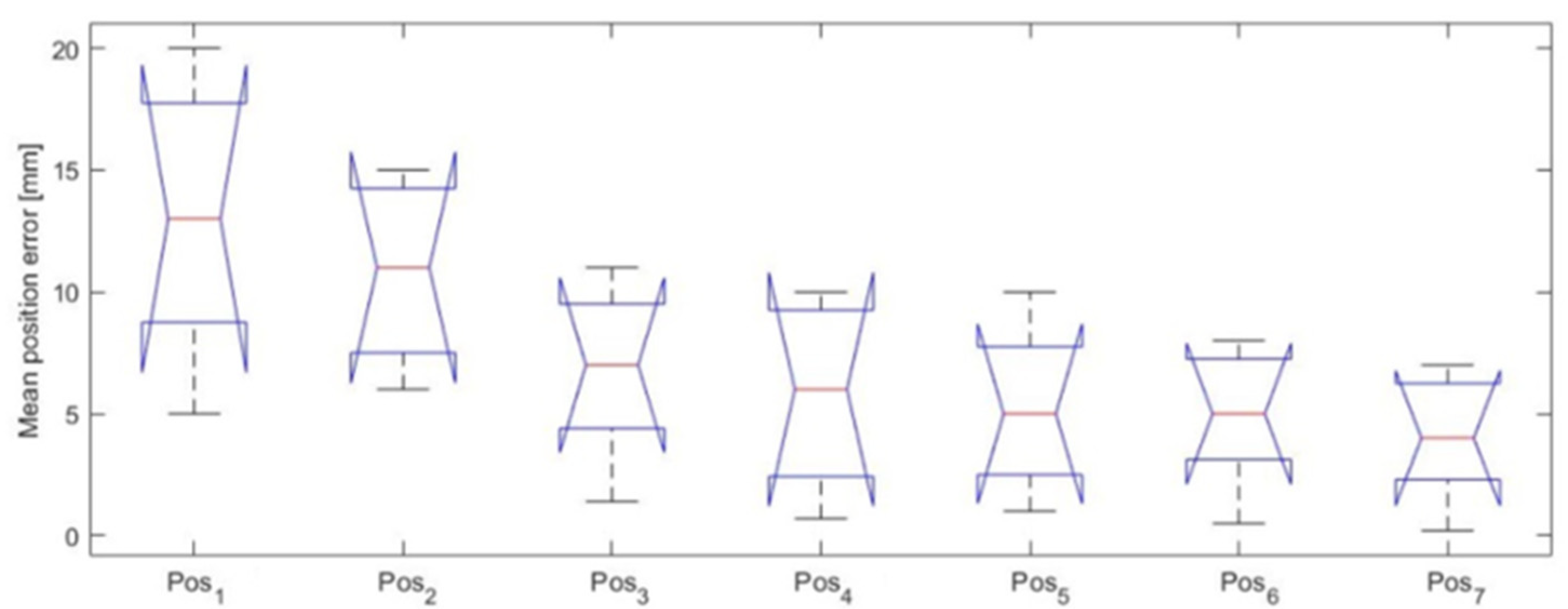
3.4.2. Localisation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ritson, C. Population Growth and Global Food Supplies. In Food Education and Food Technology in School Curricula 2020; Springer: Cham, Switzerland, 2020; pp. 261–271. [Google Scholar]
- Pachapur, P.K.; Pachapur, V.L.; Brar, S.K.; Galvez, R.; Le Bihan, Y.; Surampalli, R.Y. Food Security and Sustainability. Sustainability: Fundamentals and Applications; Surampalli, R., Zhang, T., Goyal, M.K., Brar, S., Tyagi, R., Eds.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2020; pp. 357–374. [Google Scholar]
- Srivastava, R.K. Influence of Sustainable Agricultural Practices on Healthy Food Cultivation. In Environmental Chemistry for a Sustainable World; Springer: Cham, Switzerland, 2020; pp. 95–124. [Google Scholar]
- Loures, L.; Chamizo, A.; Ferreira, P.; Loures, A.; Castanho, R.; Panagopoulos, T. Assessing the effectiveness of precision agriculture management systems in mediterranean small farms. Sustainability 2020, 12, 3765. [Google Scholar] [CrossRef]
- Poblete-Echeverría, C.; Fuentes, S. Editorial: Special issue “Emerging sensor technology in agriculture”. Sensors 2020, 20, 3827. [Google Scholar] [CrossRef] [PubMed]
- Singh, R.K.; Aernouts, M.; De Meyer, M.; Weyn, M.; Berkvens, R. Leveraging LoRaWAN technology for precision agriculture in greenhouses. Sensors 2020, 20, 1827. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cubero, S.; Marco-Noales, E.; Aleixos, N.; Barbé, S.; Blasco, J. Robhortic: A field robot to detect pests and diseases in horticultural crops by proximal sensing. Agriculture 2020, 10, 276. [Google Scholar] [CrossRef]
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile robotics in agricultural operations: A narrative review on planning aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Fue, K.; Porter, W.; Barnes, E.; Rains, G. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEngineering 2020, 2, 150–174. [Google Scholar] [CrossRef] [Green Version]
- Hussain, M.; Naqvi, S.H.A.; Khan, S.H.; Farhan, M. An Intelligent Autonomous Robotic System for Precision Farming. In Proceedings of the 2020 3rd International Conference on Intelligent Autonomous Systems, ICoIAS 2020, Singapore, 26–29 February 2020; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2020; pp. 133–139. [Google Scholar]
- CORE Organic Cofund. Available online: http://projects.au.dk/coreorganiccofund/research-projects/sureveg/ (accessed on 3 March 2019).
- Hajjaj, S.S.H.; Sahari, K.S.M. Ieee Review of Agriculture Robotics: Practicality and Feasibility. In Proceedings of the IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Tokyo, Japan, 17–20 December 2016; pp. 194–198. [Google Scholar]
- Vougioukas, S.G. Agricultural robotics. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 365–392. [Google Scholar] [CrossRef]
- Fountas, S.; Mylonas, N.; Malounas, I.; Rodias, E.; Hellmann Santos, C.; Pekkeriet, E. Agricultural Robotics for Field Operations. Sensors 2020, 20, 2672. [Google Scholar] [CrossRef] [PubMed]
- Barbosa, W.S.; Oliveira, A.I.S.; Barbosa, G.B.P.; Leite, A.C.; Figueiredo, K.T.; Vellasco, M.; Caarls, W. Design and Development of an Autonomous Mobile Robot for Inspection of Soy and Cotton Crops. In Proceedings of the 12th International Conference on the Developments in eSystems Engineering (DeSE), Kazan, Russia, 7–10 October 2019; pp. 557–562. [Google Scholar]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Mohamed, Z. Ieee Development of an Autonomous Crop Inspection Mobile Robot System. In Proceedings of the IEEE Student Conference on Research and Development (SCOReD), Kuala Lumpur, Malaysia, 13–14 December 2015; pp. 105–110. [Google Scholar]
- Slaughter, D.C.; Giles, D.K.; Downey, D. Autonomous robotic weed control systems: A review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
- Gerhards, R.; Sanchez, D.A.; Hamouz, P.; Peteinatos, G.G.; Christensen, S.; Fernandez-Quintanilla, C. Advances in site-specific weed management in agriculture-A review. Weed Res. 2022, 62, 123–133. [Google Scholar] [CrossRef]
- Kumar, P.; Ashok, G. Design and fabrication of smart seed sowing robot. In Proceedings of the 3rd International Conference on Advanced Materials and Modern Manufacturing (ICAMMM), Chennai, India, 3–4 April 2020; pp. 354–358. [Google Scholar]
- Aravind, K.R.; Raja, P.; Perez-Ruiz, M. Task-based agricultural mobile robots in arable farming: A review. Span. J. Agric. Res. 2017, 15, e02R01. [Google Scholar] [CrossRef]
- Wang, Z.H.; Xun, Y.; Wang, Y.K.; Yang, Q.H. Review of smart robots for fruit and vegetable picking in agriculture. Int. J. Agric. Biol. Eng. 2022, 15, 33–54. [Google Scholar]
- Ditzler, L.; Driessen, C. Automating Agroecology: How to Design a Farming Robot Without a Monocultural Mindset? J. Agric. Environ. Ethics 2022, 35, 2. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Li, C.; Takeda, F.; Kramer, E.A.; Ashrafi, H.; Hunter, J. 3D point cloud data to quantitatively characterize size and shape of shrub crops. Hortic. Res. 2019, 6, 43. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cruz Ulloa, C.; Krus, A.; Torres Llerena, G.; Barrientos, A.; Del Cerro, J.; Valero, C. ROBOFERT: Human-Robot Advanced Interface for Robotic Fertilization Process. In Trends in Artificial Intelligence and Computer Engineering; Botto-Tobar, M., Gómez, O.S., Rosero Miranda, R., Díaz Cadena, A., Montes León, S., Luna-Encalada, W., Eds.; ICAETT 2021; Lecture Notes in Networks and Systems; Springer: Cham, Switzerland, 2022. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valero, C.; Krus, A.; Cruz Ulloa, C.; Barrientos, A.; Ramírez-Montoro, J.J.; del Cerro, J.; Guillén, P. Single Plant Fertilization Using a Robotic Platform in an Organic Cropping Environment. Agronomy 2022, 12, 1339. https://doi.org/10.3390/agronomy12061339
Valero C, Krus A, Cruz Ulloa C, Barrientos A, Ramírez-Montoro JJ, del Cerro J, Guillén P. Single Plant Fertilization Using a Robotic Platform in an Organic Cropping Environment. Agronomy. 2022; 12(6):1339. https://doi.org/10.3390/agronomy12061339
Chicago/Turabian StyleValero, Constantino, Anne Krus, Christyan Cruz Ulloa, Antonio Barrientos, Juan José Ramírez-Montoro, Jaime del Cerro, and Pablo Guillén. 2022. "Single Plant Fertilization Using a Robotic Platform in an Organic Cropping Environment" Agronomy 12, no. 6: 1339. https://doi.org/10.3390/agronomy12061339
APA StyleValero, C., Krus, A., Cruz Ulloa, C., Barrientos, A., Ramírez-Montoro, J. J., del Cerro, J., & Guillén, P. (2022). Single Plant Fertilization Using a Robotic Platform in an Organic Cropping Environment. Agronomy, 12(6), 1339. https://doi.org/10.3390/agronomy12061339