


Research on Precise Fertilization Method of Rice Tillering Stage Based on UAV Hyperspectral Remote Sensing Prescription Map


Abstract
1. Introduction
2. Materials and Methods
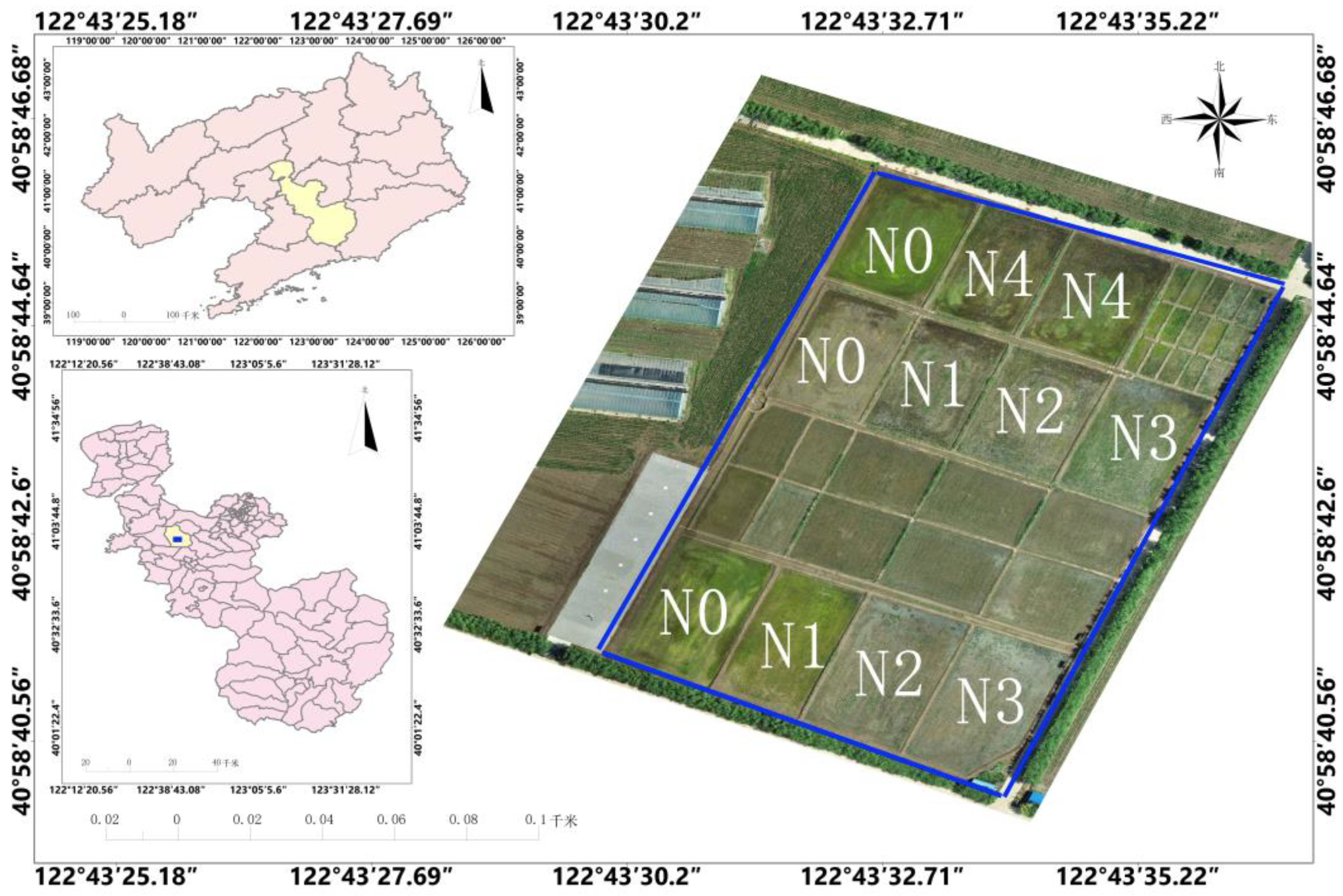
2.1. Study Area and Experimental Details
2.2. Data Collection
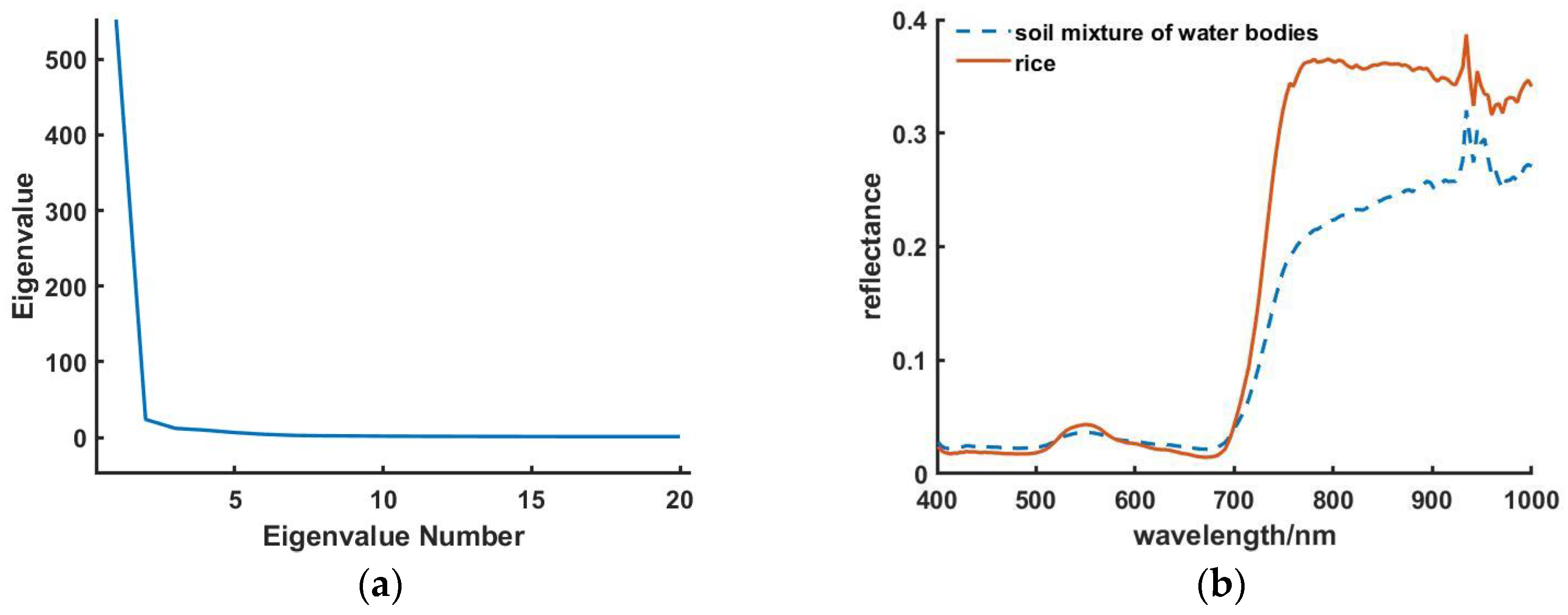
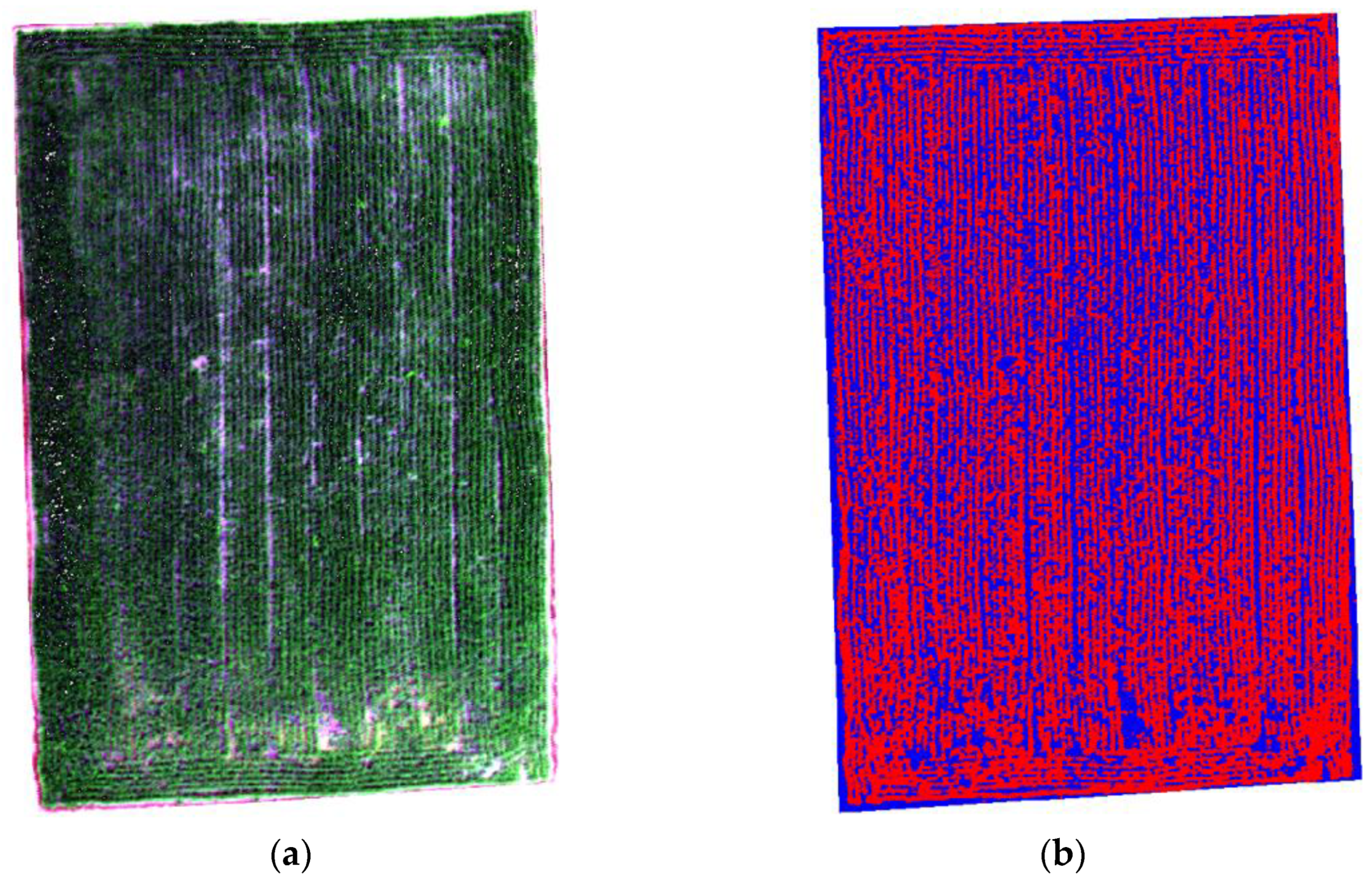
2.3. UAV Hyperspectral Remote Sensing Image Unmixing
2.4. Hyperspectral Remote Sensing Modeling Method for Nitrogen Content of Rice
2.5. UAV Remote Sensing Rice Fertilization Decision and Prescription Map Generation Method
2.6. Agricultural UAV Fertilizer-Chasing Variable Spraying and Effect Evaluation
3. Results and Analysis
3.1. Hyperspectral Image Unmixing Results of Rice Tillering Stage
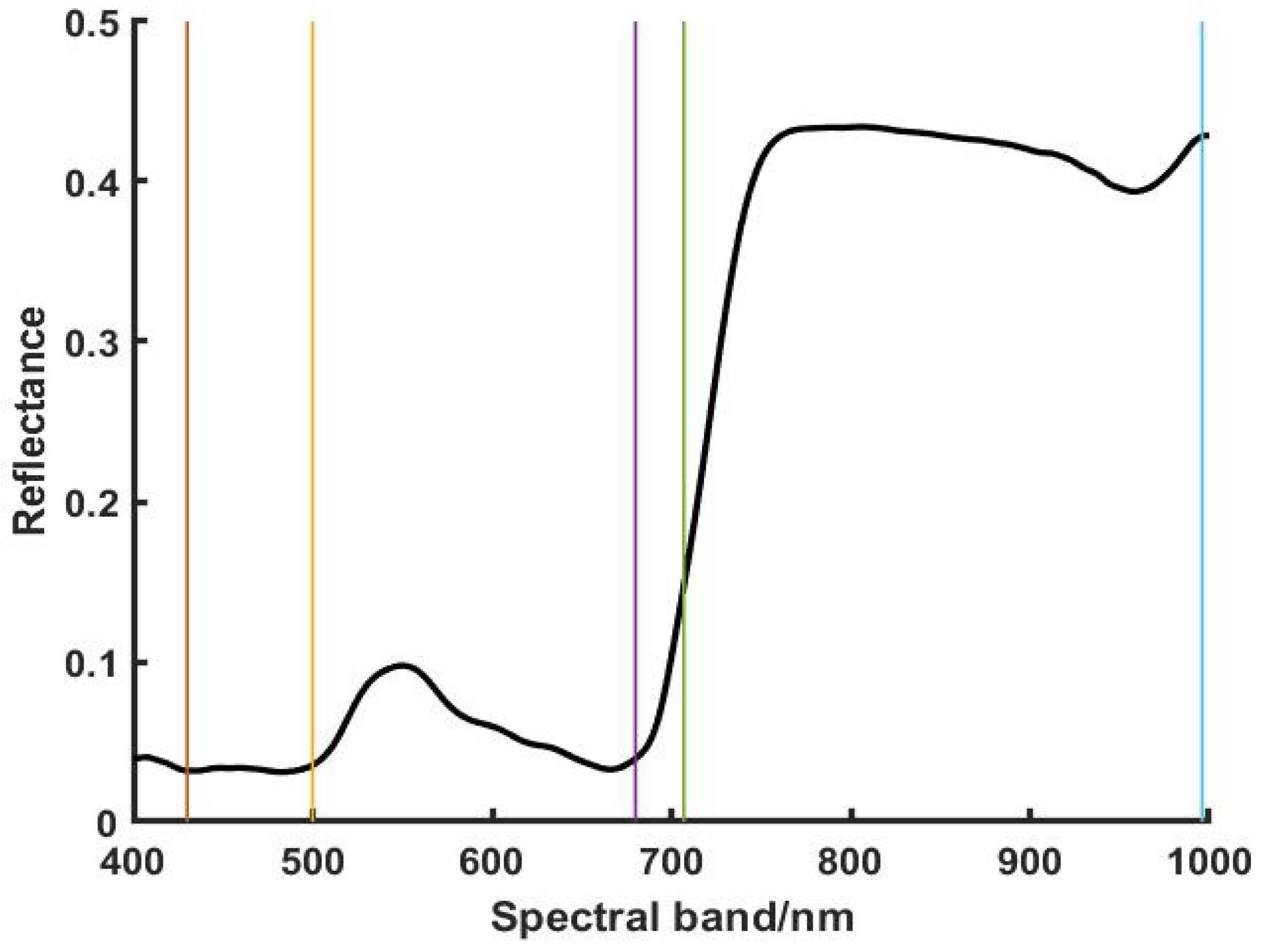
3.2. Hyperspectral Extraction of Rice at Tilling Stage
3.3. WOA-ELM Inversion Model for Nitrogen Content of Rice
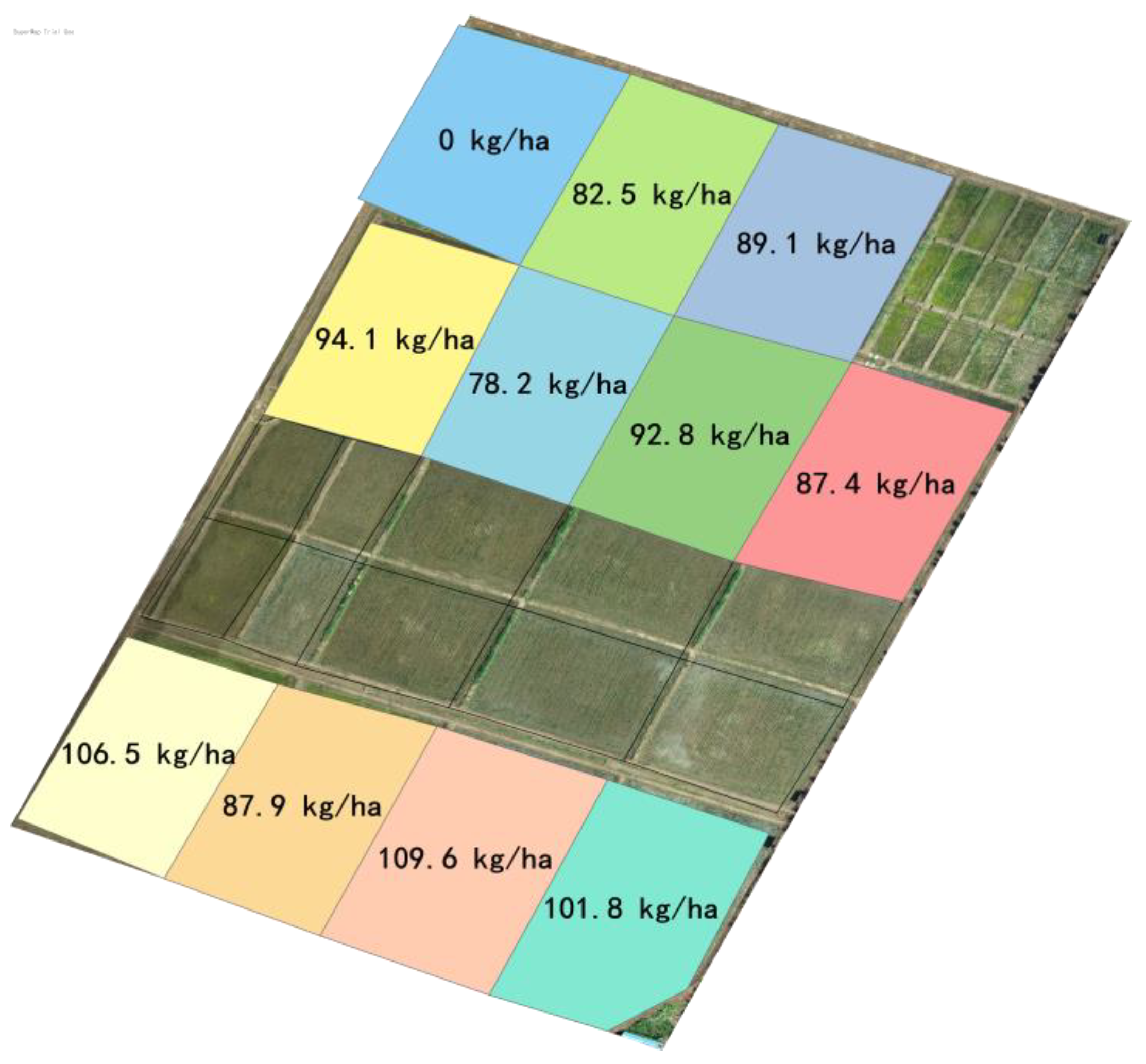
3.4. Rice Fertilization Prescription Map Generation for Agricultural UAVs
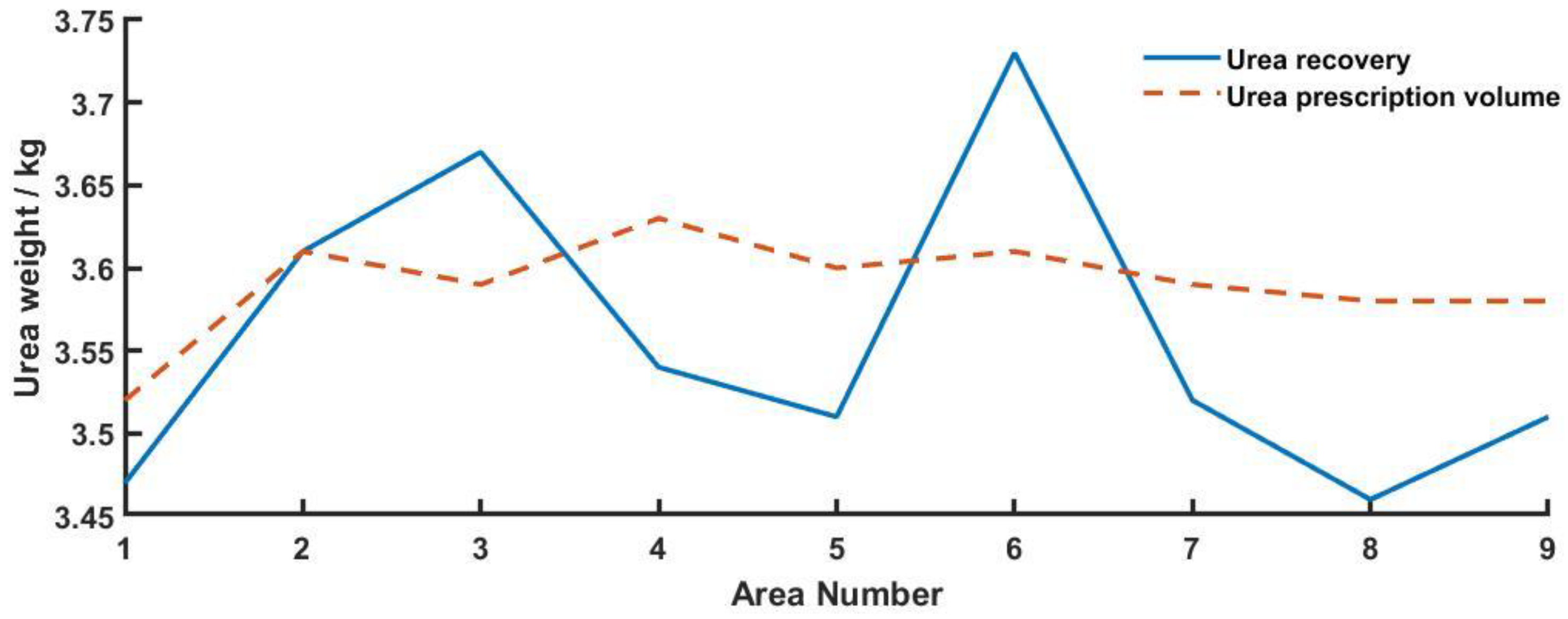
3.5. Evaluation of Fertilizer Chasing and Spraying Effect by Agricultural UAVs
4. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ma, G.-H.; Yuan, L.-P. Hybrid rice achievements, development and prospect in China. J. Integr. Agric. 2015, 14, 197–205. [Google Scholar] [CrossRef]
- Cao, D.; Feng, J.-Z.; Bai, L.-Y.; Xun, L.; Jing, H.-T.; Sun, J.-K.; Zhang, J.-H. Delineating the rice crop activities in Northeast China through regional parametric synthesis using satellite remote sensing time-series data from 2000 to 2015. J. Integr. Agric. 2021, 20, 424–437. [Google Scholar] [CrossRef]
- Chen, P.; Nie, T.; Chen, S.; Zhang, Z.; Qi, Z.; Liu, W. Recovery efficiency and loss of 15N-labelled urea in a rice-soil system under water saving irrigation in the Songnen Plain of Northeast China. Agric. Water Manag. 2019, 222, 139–153. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Liu, Z. Effects of climate change on paddy expansion and potential adaption strategies for sustainable agriculture development across Northeast China. Appl. Geogr. 2022, 141, 102667. [Google Scholar] [CrossRef]
- Xin, F.; Xiao, X.; Dong, J.; Zhang, G.; Zhang, Y.; Wu, X.; Li, X.; Zou, Z.; Ma, J.; Du, G.; et al. Large increases of paddy rice area, gross primary production, and grain production in Northeast China during 2000–2017. Sci. Total Environ. 2020, 711, 135183. [Google Scholar] [CrossRef]
- Yin, Y.; Peng, X.; Guo, S.; Zhai, L.; Hua, L.; Wang, H.; Liu, H. How to improve the light-simplified and cleaner production of rice in cold rice areas from the perspective of fertilization. J. Clean. Prod. 2022, 361, 131694. [Google Scholar] [CrossRef]
- Prudnikova, E.; Savin, I.; Vindeker, G.; Grubina, P.; Shishkonakova, E.; Sharychev, D. Influence of Soil Background on Spectral Reflectance of Winter Wheat Crop Canopy. Remote Sens. 2019, 11, 1932. [Google Scholar] [CrossRef]
- Wang, W.; Wu, Y.; Zhang, Q.; Zheng, H.; Yao, X.; Zhu, Y.; Cao, W.; Cheng, T. AAVI: A Novel Approach to Estimating Leaf Nitrogen Concentration in Rice From Unmanned Aerial Vehicle Multispectral Imagery at Early and Middle Growth Stages. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 6716–6728. [Google Scholar] [CrossRef]
- Yang, D.; Peng, S.; Zheng, C.; Xiang, H.; Huang, J.; Cui, K.; Wang, F. Effects of nitrogen fertilization for bud initiation and tiller growth on yield and quality of rice ratoon crop in central China. Field Crop. Res. 2021, 272, 108286. [Google Scholar] [CrossRef]
- Rejeb, A.; Abdollahi, A.; Rejeb, K.; Treiblmaier, H. Drones in agriculture: A review and bibliometric analysis. Comput. Electron. Agric. 2022, 198, 107017. [Google Scholar] [CrossRef]
- Kharim, M.N.A.; Wayayok, A.; Shariff, A.R.M.; Abdullah, A.F.; Husin, E.M. Droplet deposition density of organic liquid fertilizer at low altitude UAV aerial spraying in rice cultivation. Comput. Electron. Agric. 2019, 167, 105045. [Google Scholar] [CrossRef]
- Song, C.; Zhou, Z.; Zang, Y.; Zhao, L.; Yang, W.; Luo, X.; Jiang, R.; Ming, R.; Zang, Y.; Zi, L.; et al. Variable-rate control system for UAV-based granular fertilizer spreader. Comput. Electron. Agric. 2020, 180, 105832. [Google Scholar] [CrossRef]
- Shi, Q.; Liu, D.; Mao, H.; Shen, B.; Li, M. Wind-induced response of rice under the action of the downwash flow field of a multi-rotor UAV. Biosyst. Eng. 2021, 203, 60–69. [Google Scholar] [CrossRef]
- Yao, L.; Wang, Q.; Yang, J.; Zhang, Y.; Zhu, Y.; Cao, W.; Ni, J. UAV-Borne Dual-Band Sensor Method for Monitoring Physiological Crop Status. Sensors 2019, 19, 816. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Shi, Y.; Lan, Y.; Guo, S. Vertical distribution and vortex structure of rotor wind field under the influence of rice canopy. Comput. Electron. Agric. 2019, 159, 140–146. [Google Scholar] [CrossRef]
- Li, D.; Wang, X.; Zheng, H.; Zhou, K.; Yao, X.; Tian, Y.; Zhu, Y.; Cao, W.; Cheng, T. Estimation of area- and mass-based leaf nitrogen contents of wheat and rice crops from water-removed spectra using continuous wavelet analysis. Plant Methods 2018, 14, 1–20. [Google Scholar] [CrossRef] [PubMed]
- Zhou, K.; Cheng, T.; Zhu, Y.; Cao, W.; Ustin, S.L.; Zheng, H.; Yao, X.; Tian, Y. Assessing the Impact of Spatial Resolution on the Estimation of Leaf Nitrogen Concentration Over the Full Season of Paddy Rice Using Near-Surface Imaging Spectroscopy Data. Front. Plant Sci. 2018, 9, 964. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Zheng, H.; Wu, Y.; Yao, X.; Zhu, Y.; Cao, W.; Cheng, T. An assessment of background removal approaches for improved estimation of rice leaf nitrogen concentration with unmanned aerial vehicle multispectral imagery at various observation times. Field Crop. Res. 2022, 283, 108543. [Google Scholar] [CrossRef]
- Brinkhoff, J.; Dunn, B.W.; Robson, A.J. Rice nitrogen status detection using commercial-scale imagery. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102627. [Google Scholar] [CrossRef]
- Shi, P.; Wang, Y.; Xu, J.; Zhao, Y.; Yang, B.; Yuan, Z.; Sun, Q. Rice nitrogen nutrition estimation with RGB images and machine learning methods. Comput. Electron. Agric. 2021, 180, 105860. [Google Scholar] [CrossRef]
- Barbedo J G, A. Detection of nutrition deficiencies in plants using proximal images and machine learning: A review. Comput. Electron. Agric. 2019, 162, 482–492. [Google Scholar] [CrossRef]
- Moghimi, A.; Yang, C.; Anderson, J.A. Aerial hyperspectral imagery and deep neural networks for high-throughput yield phenotyping in wheat. Comput. Electron. Agric. 2020, 172, 105299. [Google Scholar] [CrossRef]
- Lixin, G.; Weixin, X.; Jihong, P. Segmented minimum noise fraction transformation for efficient feature extraction of hyperspectral images. Pattern Recognit. 2015, 48, 3216–3226. [Google Scholar] [CrossRef]
- Chang, C.I.; Li, Y.; Wu, C.C. Band detection in hyperspectral imagery by pixel purity index. In Proceedings of the 2015 7th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Tokyo, Japan, 2–5 June 2015; pp. 1–4. [Google Scholar]
- Zhang, Y.; Gao, J.; Cen, H.; Lu, Y.; Yu, X.; He, Y.; Pieters, J.G. Automated spectral feature extraction from hyperspectral images to differentiate weedy rice and barnyard grass from a rice crop. Comput. Electron. Agric. 2019, 159, 42–49. [Google Scholar] [CrossRef]
- Ahmad, M.; Shabbir, S.; Oliva, D.; Mazzara, M.; Distefano, S. Spatial-prior generalized fuzziness extreme learning machine autoencoder-based active learning for hyperspectral image classification. Optik 2020, 206, 163712. [Google Scholar] [CrossRef]
- Hou, Y.; Zhou, Y.; Zhou, W. Comparative research of evaluation nitrogen fertilizer efficiency between the nitrogen use efficiency and fertilizer yield method. J. Northeast. Agric. Univ. 2013, 44, 28–36, (in Chinese with English abstract). [Google Scholar]
- Pandey, A.; Jain, K. An intelligent system for crop identification and classification from UAV images using conjugated dense convolutional neural network. Comput. Electron. Agric. 2021, 192, 106543. [Google Scholar] [CrossRef]
- Wang, Z.; Tian, S. Ground object information extraction from hyperspectral remote sensing images using deep learning algorithm. Microprocess. Microsyst. 2021, 87, 104394. [Google Scholar] [CrossRef]
- Lone, Z.A.; Pais, A.R. Object detection in hyperspectral images. Digit. Signal Process. 2022, 131, 103752. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, Z.; Wu, C.; Sun, L. Segmentation algorithm for overlap recognition of seedling lettuce and weeds based on SVM and image blocking. Comput. Electron. Agric. 2022, 201, 107284. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Rice Growth Period | Test Contents |
|---|---|---|
| 12 May 2021 | Sampling of arable soil | |
| 25 May 2021 | Transplanting | |
| 11 June 2021 | Tillering stage | Remote sensing decision of topdressing UAV |
| 12 June 2021 | Tillering stage | Precise variable topdressing of plant protection UAV |
| 20 October 2021 | Mature period | Yield measurement |
| 2 November 2019 | Sampling of arable soil |
| Subdivision Number | First Fertilization Amount /kg·ha−2 | Second Fertilization Amount /kg·ha−2 | Third Fertilization Amount /kg·ha−2 | Actual Total Fertilizer Application /kg·ha−2 | Standard Fertilizer Application /kg·ha−2 |
|---|---|---|---|---|---|
| 1 | 0 | 0 | 106.5 | 106.5 | 200 |
| 2 | 40 | 10 | 87.9 | 137.9 | 200 |
| 3 | 60 | 15 | 109.6 | 184.6 | 200 |
| 4 | 80 | 20 | 101.8 | 201.8 | 200 |
| 5 | 80 | 20 | 87.4 | 187.4 | 200 |
| 6 | 60 | 15 | 92.8 | 167.8 | 200 |
| 7 | 40 | 10 | 78.2 | 128.2 | 200 |
| 8 | 0 | 0 | 94.1 | 94.1 | 200 |
| 9 | 0 | 0 | 0 | 0 | 0 |
| 10 | 40 | 10 | 82.5 | 132.5 | 200 |
| 11 | 60 | 15 | 89.1 | 164.1 | 200 |
| Total | 460 | 115 | 929.9 | 1504.9 | 2000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, F.; Bai, J.; Jin, Z.; Zhang, H.; Guo, Z.; Chen, C. Research on Precise Fertilization Method of Rice Tillering Stage Based on UAV Hyperspectral Remote Sensing Prescription Map. Agronomy 2022, 12, 2893. https://doi.org/10.3390/agronomy12112893
Yu F, Bai J, Jin Z, Zhang H, Guo Z, Chen C. Research on Precise Fertilization Method of Rice Tillering Stage Based on UAV Hyperspectral Remote Sensing Prescription Map. Agronomy. 2022; 12(11):2893. https://doi.org/10.3390/agronomy12112893
Chicago/Turabian StyleYu, Fenghua, Juchi Bai, Zhongyu Jin, Honggang Zhang, Zhonghui Guo, and Chunling Chen. 2022. "Research on Precise Fertilization Method of Rice Tillering Stage Based on UAV Hyperspectral Remote Sensing Prescription Map" Agronomy 12, no. 11: 2893. https://doi.org/10.3390/agronomy12112893
APA StyleYu, F., Bai, J., Jin, Z., Zhang, H., Guo, Z., & Chen, C. (2022). Research on Precise Fertilization Method of Rice Tillering Stage Based on UAV Hyperspectral Remote Sensing Prescription Map. Agronomy, 12(11), 2893. https://doi.org/10.3390/agronomy12112893