Determining Irrigation Depths for Soybean Using a Simulation Model of Water Flow and Plant Growth and Weather Forecasts



Abstract
1. Introduction
2. Materials and Methods
2.1. Determination of an Economical Irrigation Depth
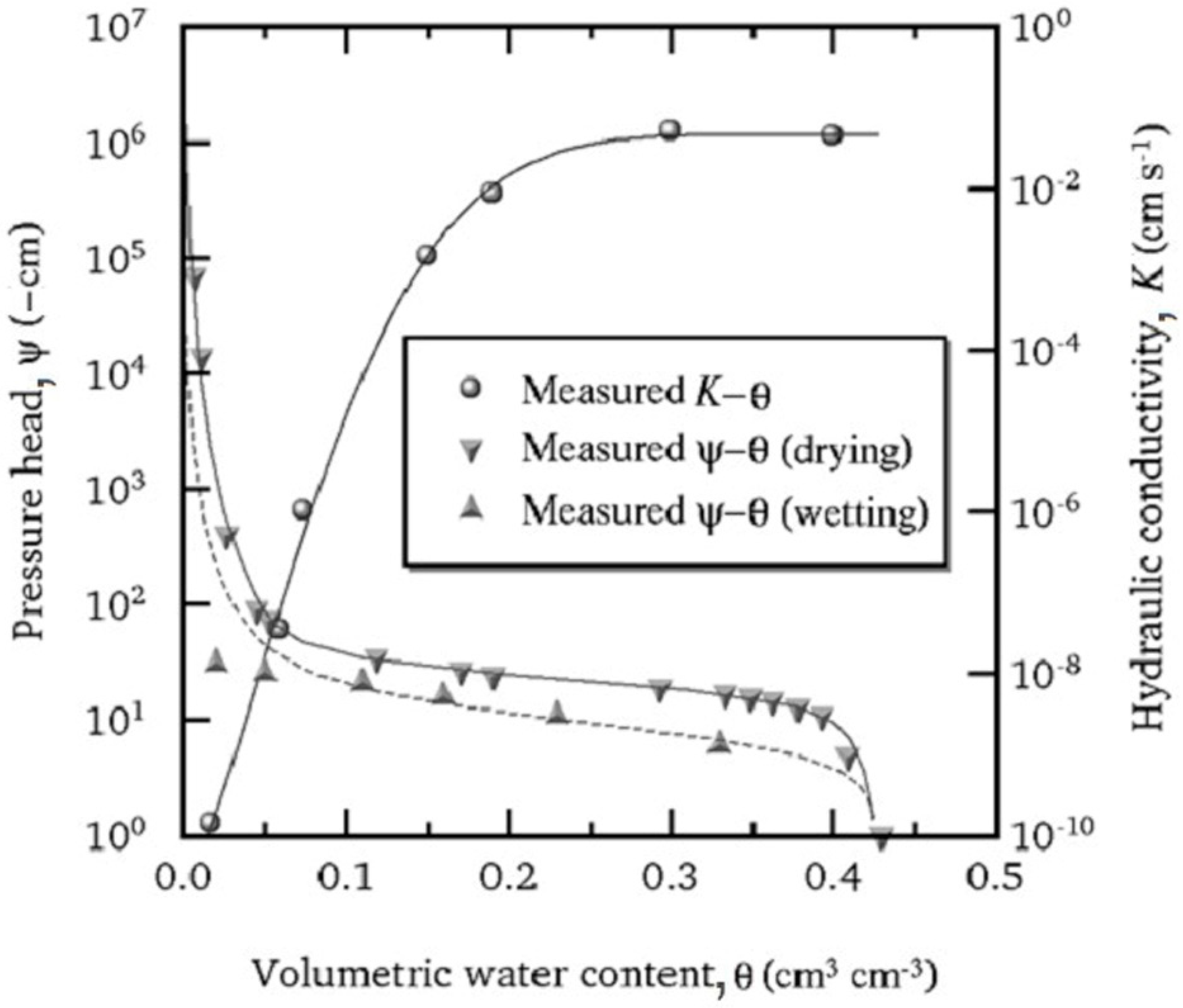
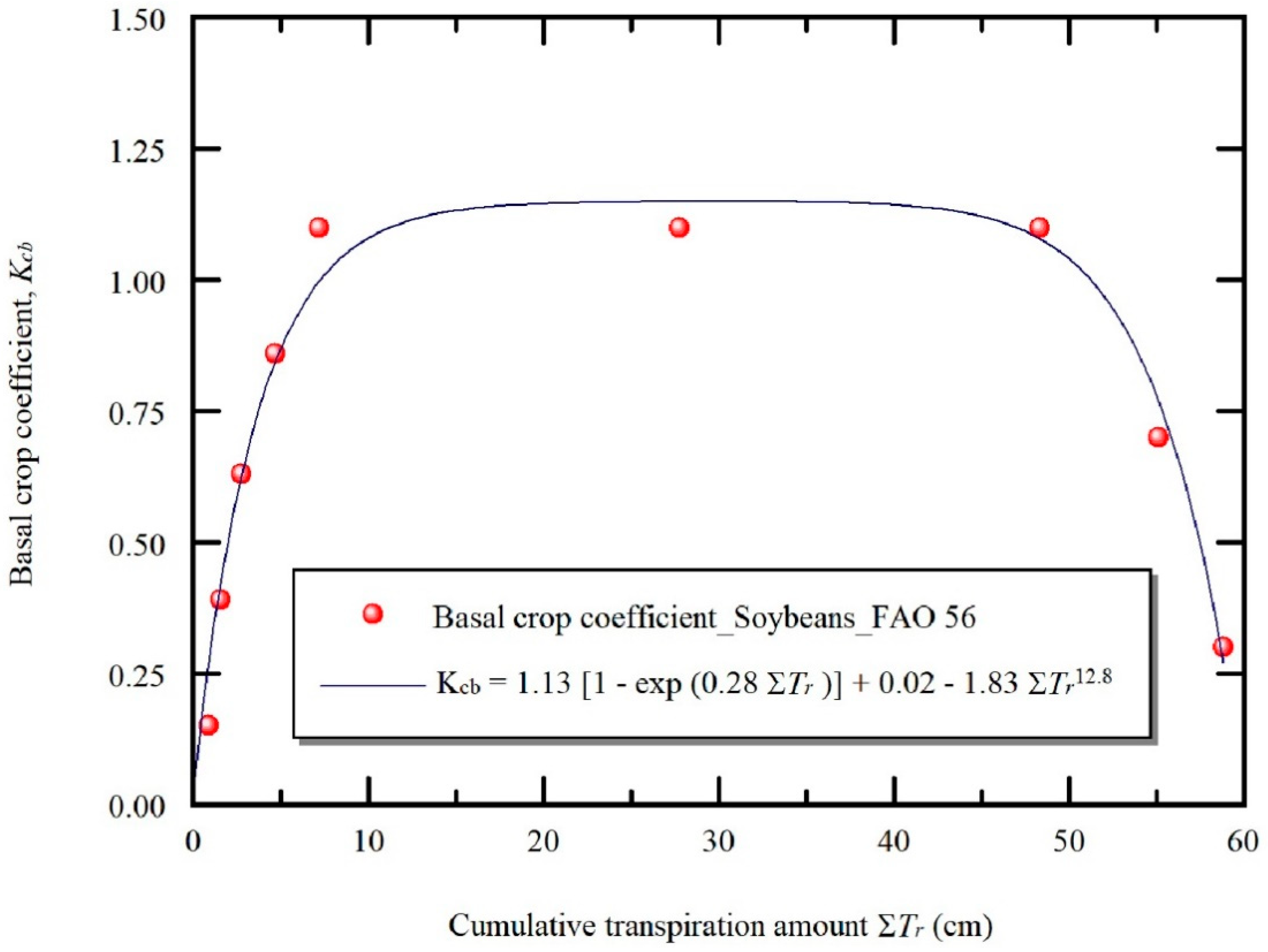
2.2. The Numerical Model
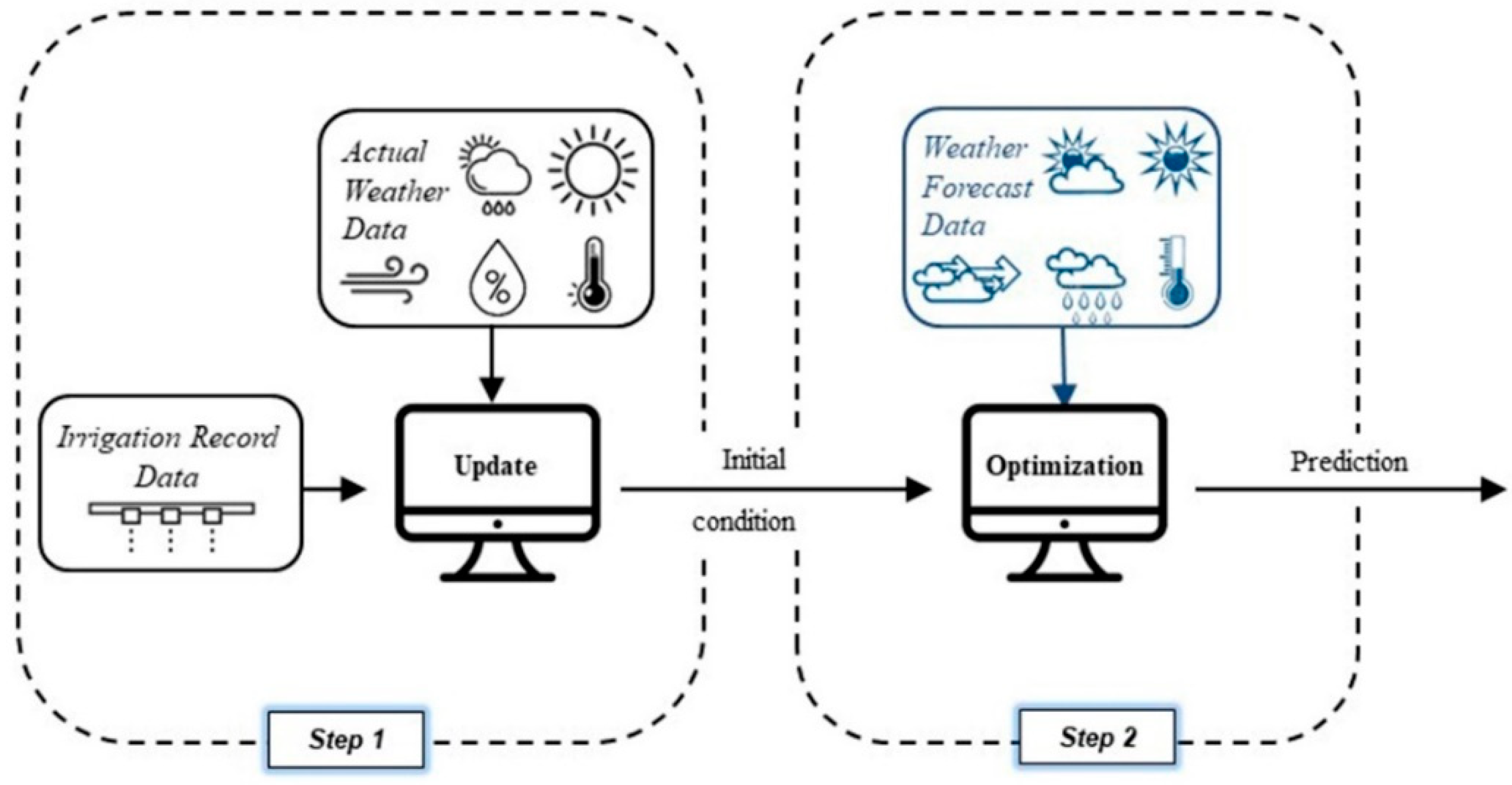
2.3. Implementation of Numerical Simulation for the Proposed Scheme
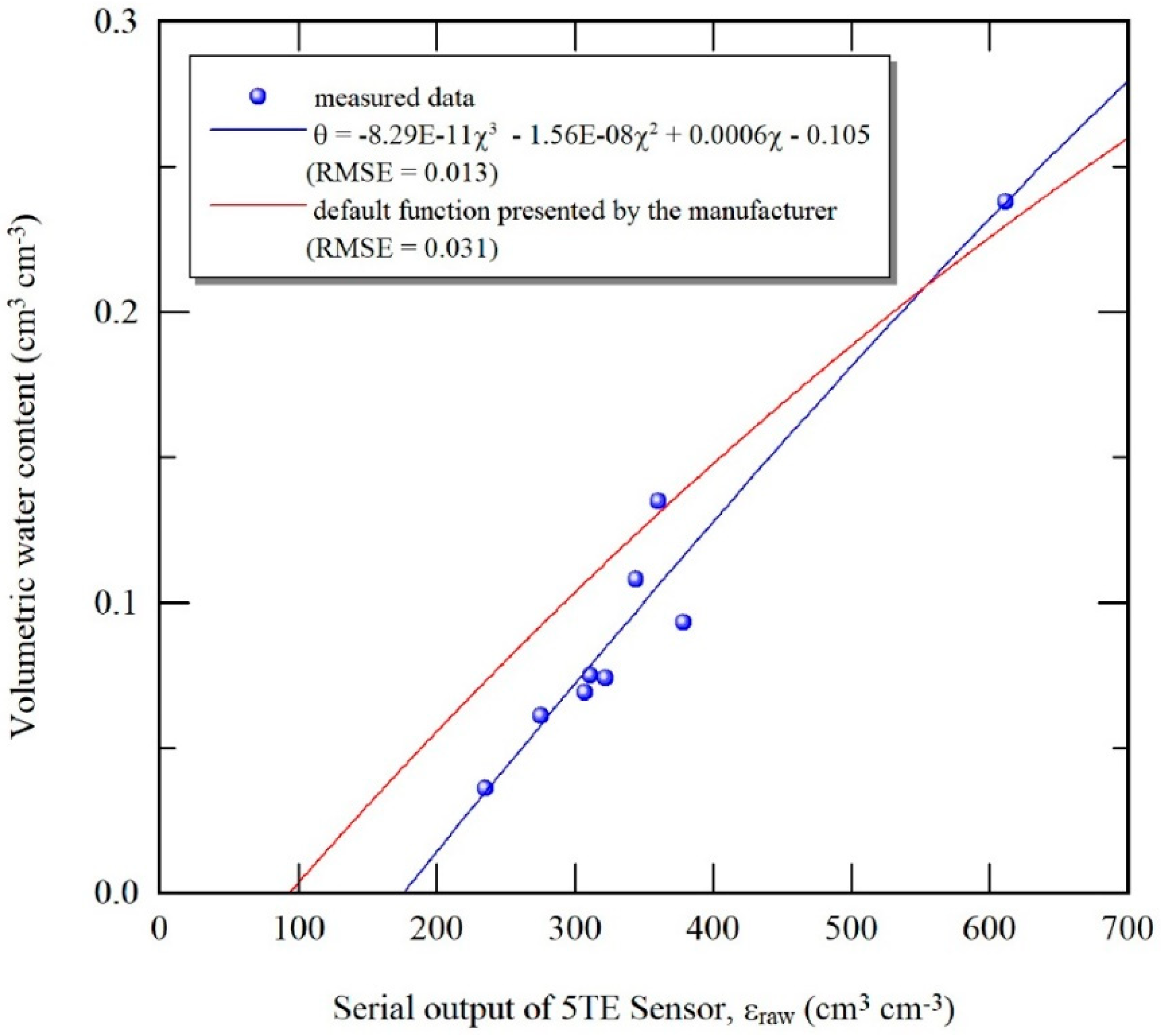
2.4. Field Experiment
3. Results
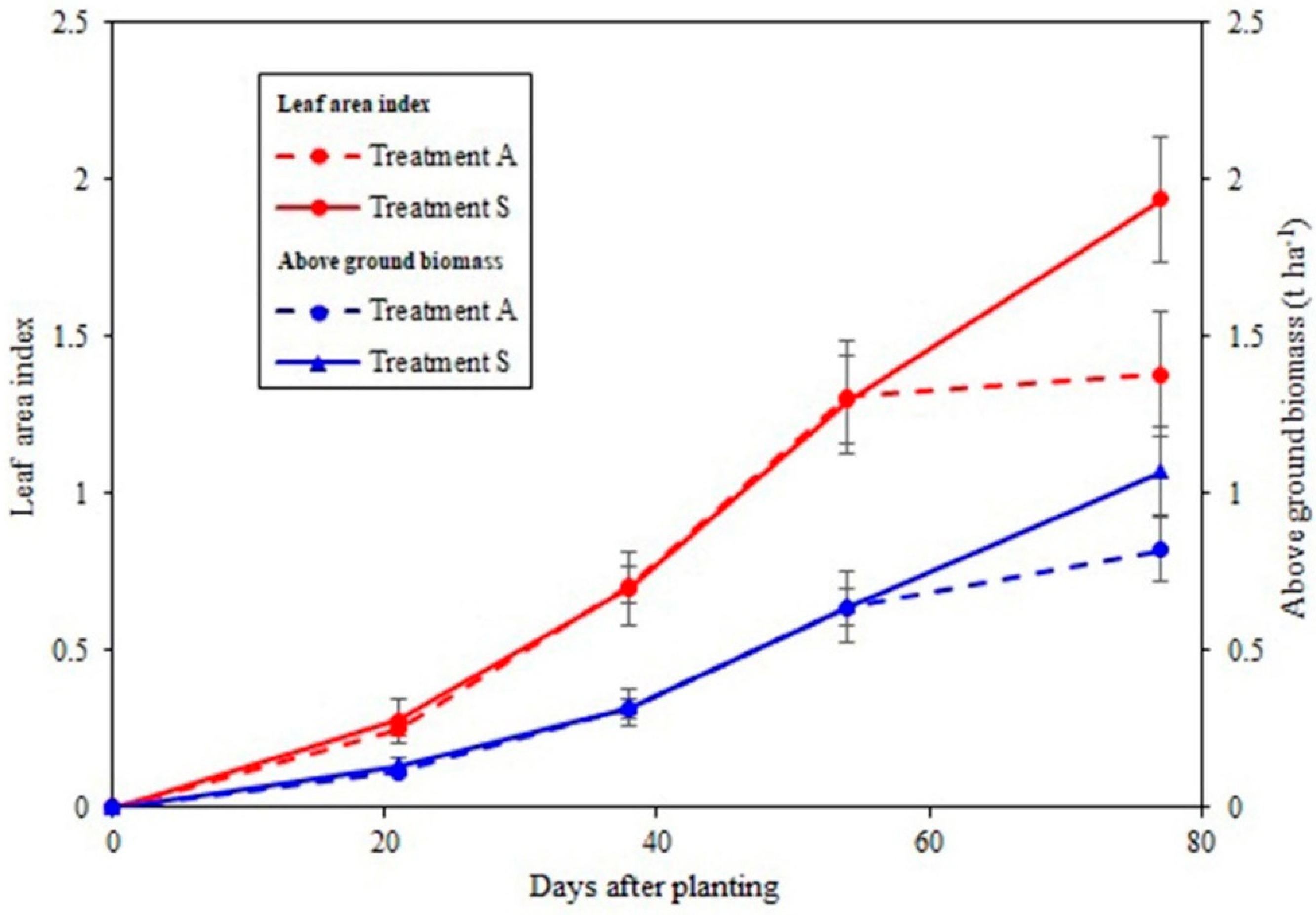
3.1. Leaf Area Index and Biomass
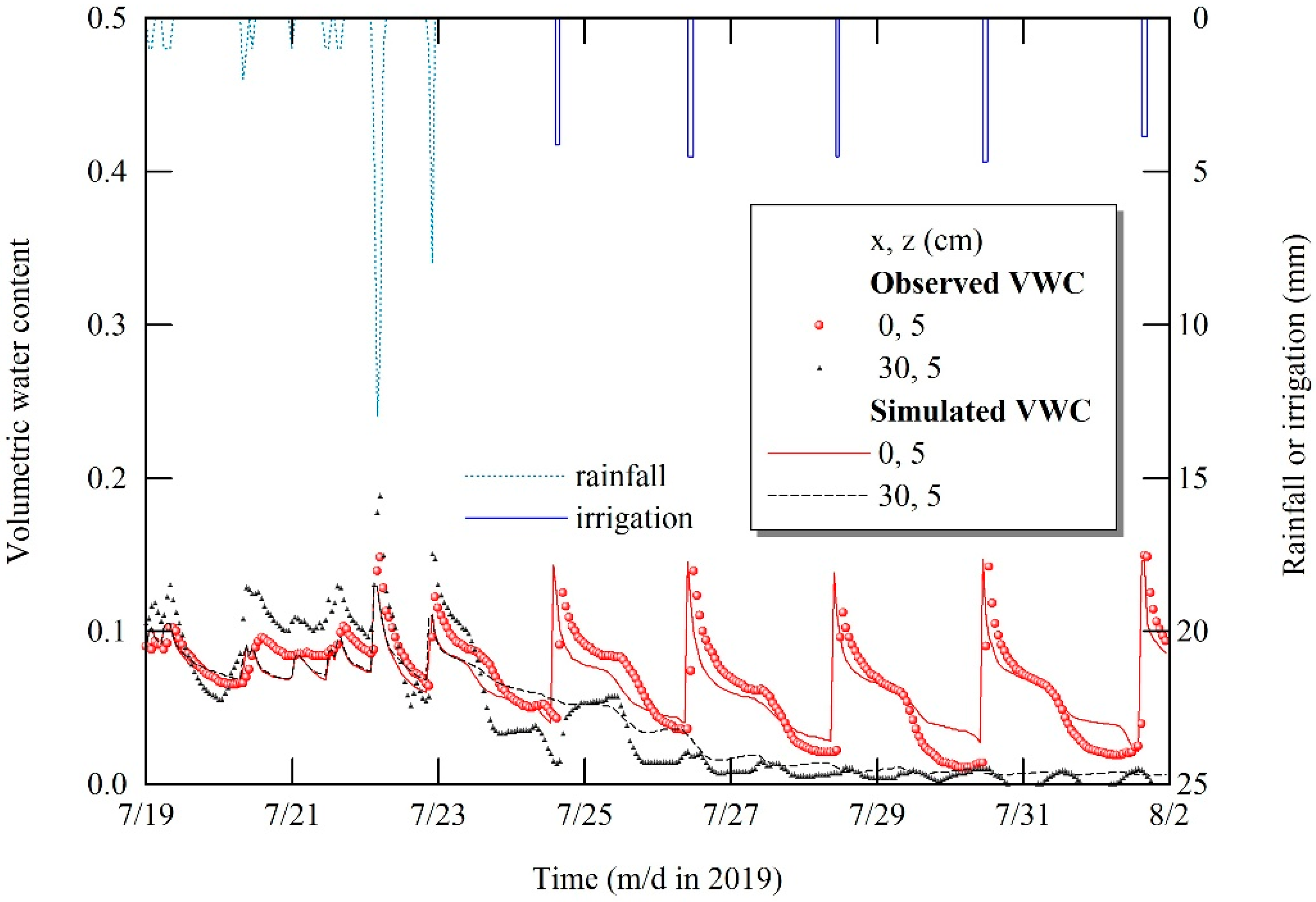
3.2. Soil Water Content
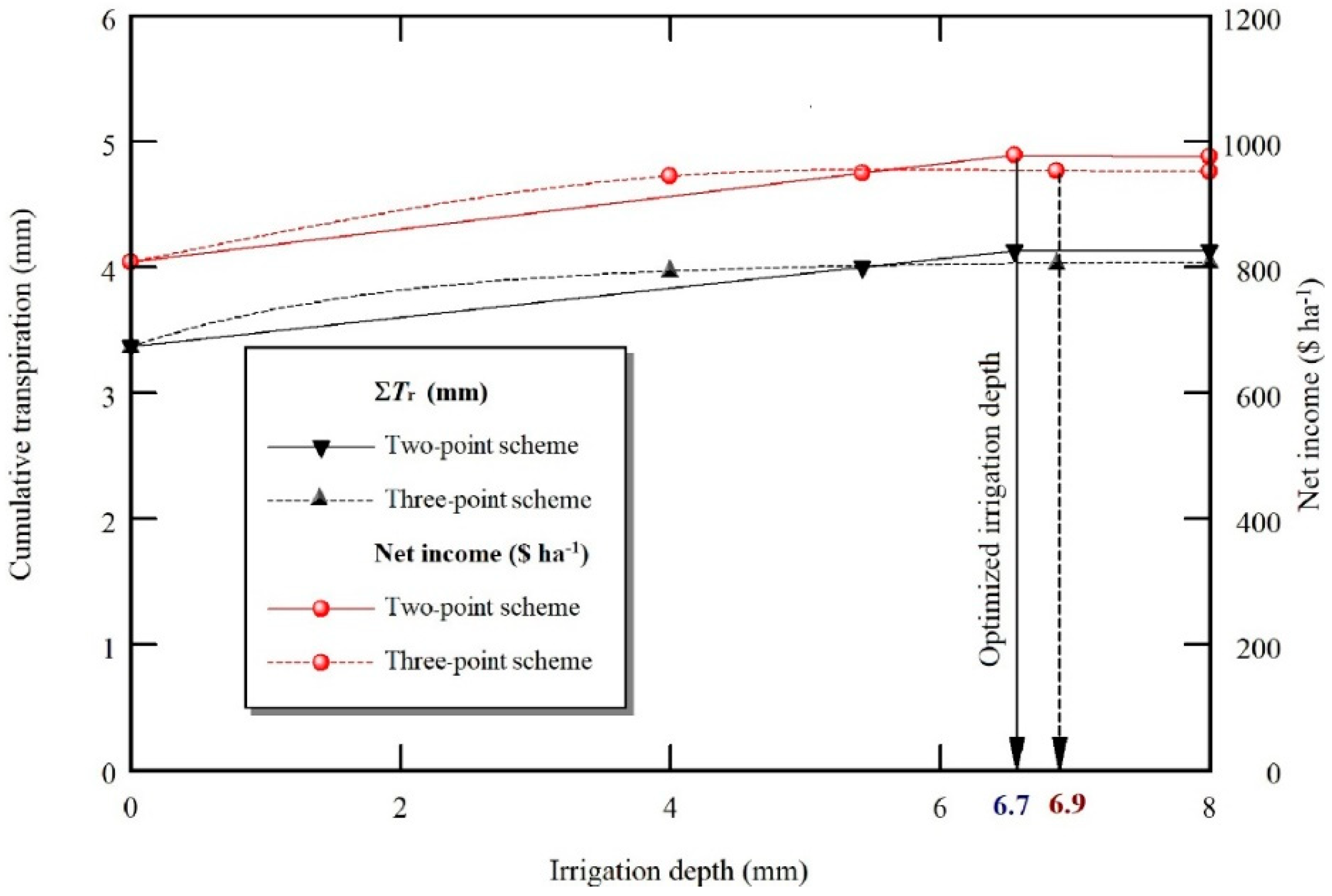
3.3. Example of Determination Optimal Irrigation Depth at Maximal Yield
3.4. Net Income and Yield Assessment
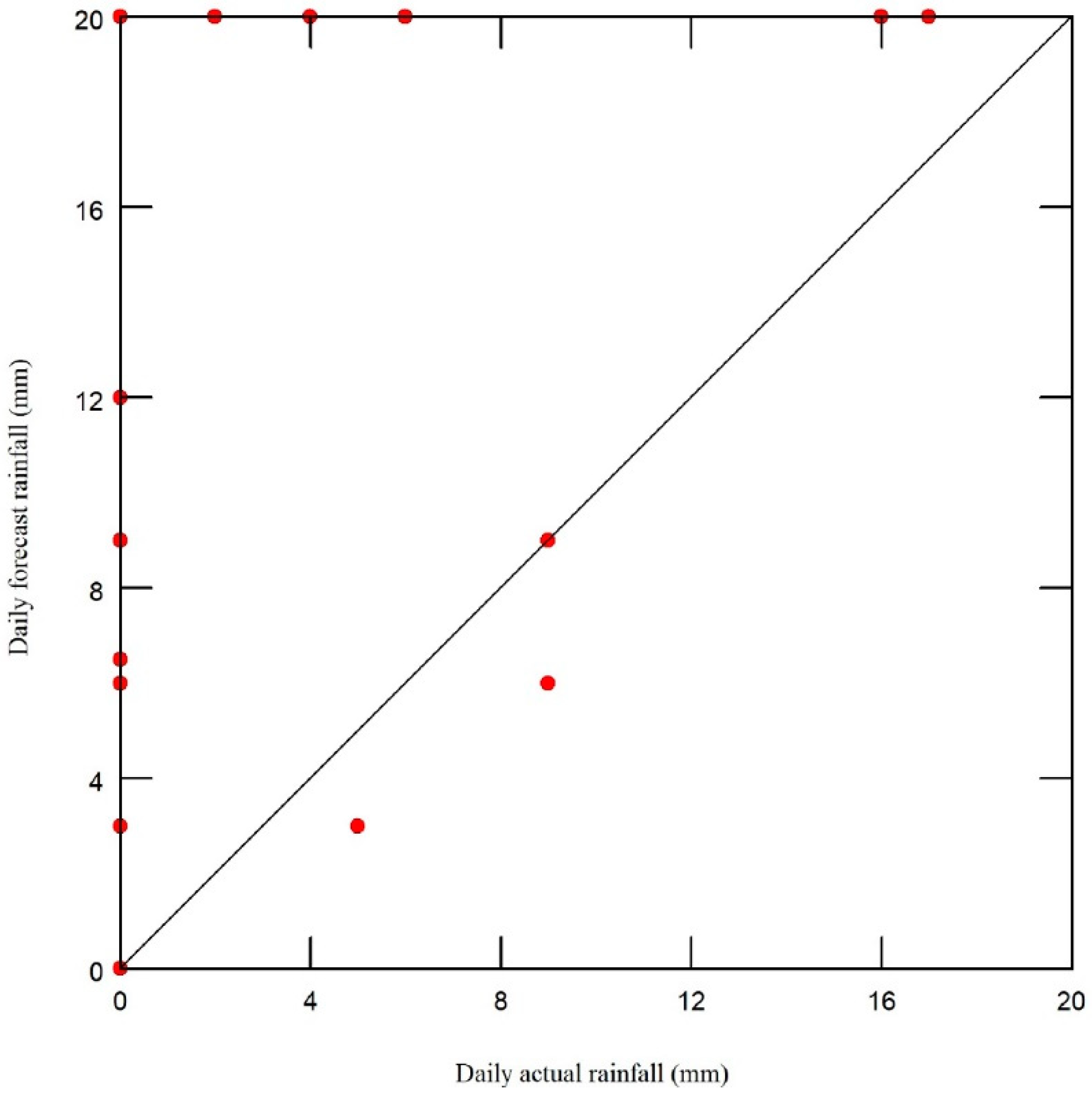
3.5. Accuracy of Weather Forecast
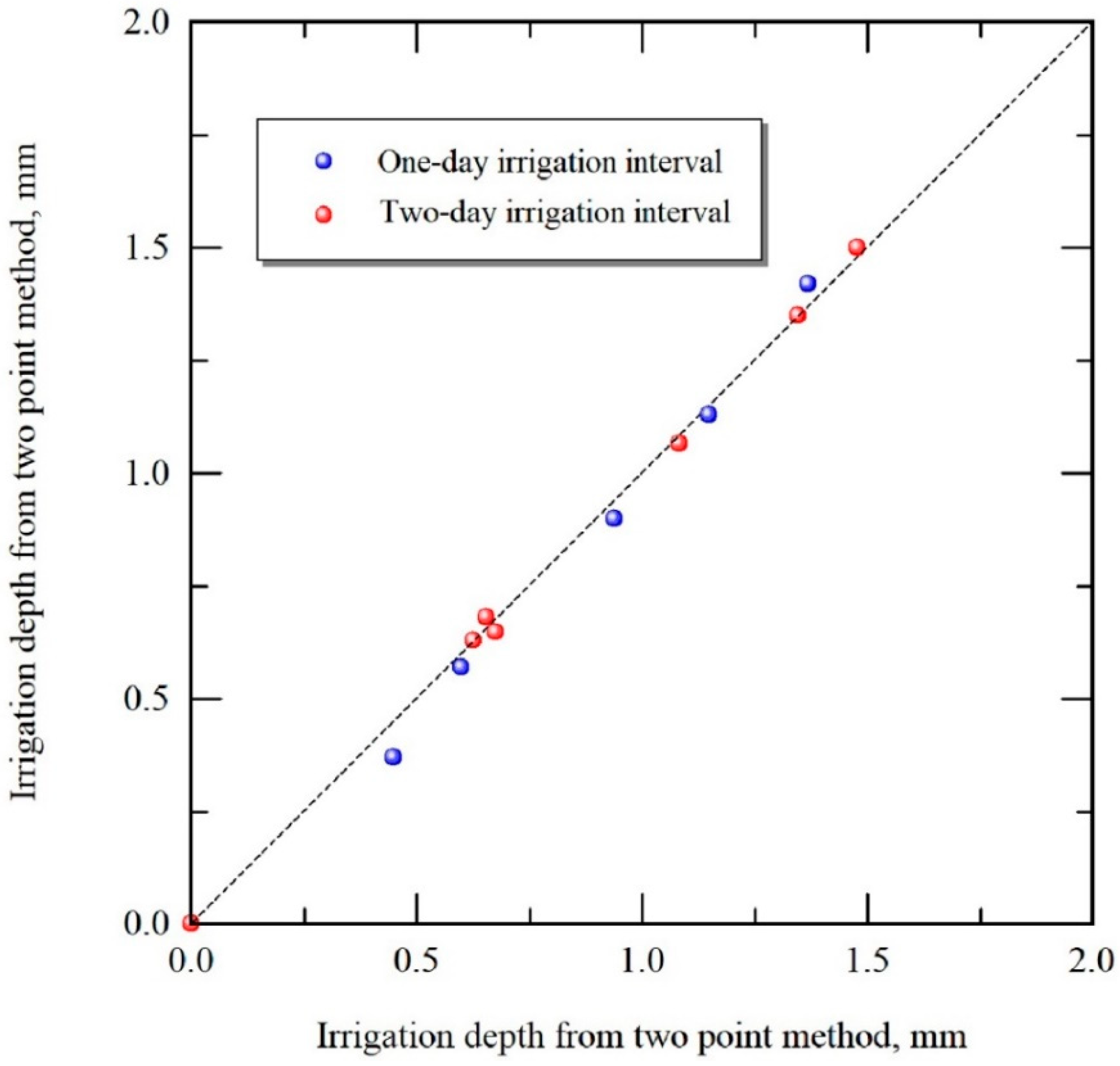
3.6. Advantages of the Proposed Scheme over Other Methods
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Debaeke, P.; Aboudrare, A. Adaptation of crop management to water-limited environments. Eur. J. Agron. 2004, 21, 433–446. [Google Scholar] [CrossRef]
- United Nations. SDG 6 Synthesis Report. Water and Salinization for All: Letting Data Lead the Way; United Nations: New York, NY, USA, 2018. [Google Scholar]
- Boutraa, T.; Akhkha, A.; Alshuaibi, A.; Atta, R. Evaluation of the effectiveness of an automated irrigation system using wheat crops. ABJNA 2011, 2, 80–88. [Google Scholar] [CrossRef]
- Romero, R.; Muriel, J.L.; Garcia, I.; Green, S.R.; Clothier, B.E. Improving heatpulse methods to extend the measurement range including reverse flows. Acta Hortic. 2012, 951, 31–38. [Google Scholar] [CrossRef]
- Domínguez-Niño, J.M.; Oliver-Manera, J.; Girona, J.; Casadesús, J. Differential irrigation scheduling by an automated algorithm of water balance tuned by capacitance-type soil moisture sensors. Agric. Water Manag. 2020, 228, 105880. [Google Scholar] [CrossRef]
- English, M. Deficit irrigation. I. Analytical framework. J. Irrig. Drain. Eng. 1990, 116, 399–412. [Google Scholar] [CrossRef]
- Zhang, Y.; Hansen, N.; Trout, T.; Nielsen, D.; Paustian, K. Modeling Defcit Irrigation of Maize with the DayCent Model. Agron. J. 2018, 110, 1754–1764. [Google Scholar] [CrossRef]
- Adeyemi, O.; Grove, I.; Peets, S.; Norton, T. Advanced Monitoring and Management Systems for Improving Sustainability in Precision Irrigation. Sustainability 2017, 9, 353. [Google Scholar] [CrossRef]
- Roy, P.C.; Guber, A.; Abouali, M.; Nejadhashemi, A.P.; Deb, K.; Smucker, A.J.M. Simulation Optimization of Water Usage and Crop Yield Using Precision Irrigation. In Proceedings of the International Conference on Evolutionary Multi-Criterion Optimization, Michigan, MI, USA, 10–13 March 2019; pp. 695–706, LNCS 11411. [Google Scholar]
- Fu, Q.; Yang, L.; Li, H.; Li, T.; Liu, D.; Ji, Y.; Li, M.; Zhang, Y. Study on the Optimization of Dry Land Irrigation Schedule in the Downstream Songhua River Basin Based on the SWAT Model. Water J. 2019, 11, 1147. [Google Scholar] [CrossRef]
- Adeboye, O.B.; Schultz, B.; Adekalu, K.O.; Prasad, K. Modelling of Response of the Growth and Yield of Soybean to Full and Deficit Irrigation by Using AquaCrop. Irrig. Drain. 2017, 66, 192–205. [Google Scholar] [CrossRef]
- Lorite, I.J.; Ramírez-Cuesta, J.M.; Cruz-Blanco, M.; Santos, C. Using weather forecast data for irrigation scheduling under semi-arid conditions. Irrig. Sci. 2015, 33, 411–427. [Google Scholar] [CrossRef]
- da Conceição, C.G.; Robaina, A.D.; Peiter, M.X.; Parizi, A.R.C.; da Conceição, J.A.; Bruning, J. Economically optimal water depth and grain yield of common bean subjected to different irrigation depths. Rev. Bras. Eng. Agric. Ambient. 2018, 22, 482–487. [Google Scholar] [CrossRef]
- Benavides, J.G.; Díaz, J.L. Formula para el calculo de la evapotranspiracion potencial adaptada al tropico (15° N–15° S). Agron. Trop. Mar. 1970, 20, 335–345. [Google Scholar]
- Wang, D.B.; Cai, X.M. Irrigation scheduling-role of weather forecasting and farmers’ behavior. J. Water Resour. Plan. Manag. 2009, 135, 364–372. [Google Scholar] [CrossRef]
- Jamal, A.; Linker, R.; Housh, M. Optimal Irrigation with Perfect Weekly Forecasts versus Imperfect Seasonal Forecasts. J. Water Resour. Plan. Manag. 2019, 145, 06019003. [Google Scholar] [CrossRef]
- Fujimaki, H.; Tokumoto, I.; Saito, T.; Inoue, M.; Shibata, M.; Okazaki, T.; Nagaz, K.; El Mokh, F. Determination of irrigation depths using a numerical model and quantitative weather forecast and comparison with an experiment. In Practical Applications of Agricultural System Models to Optimize the Use of Limited Water; Ahuja, L.R., Ma, L., Lascano, R.J., Eds.; ACSESS: Madison, WI, USA, 2014; Volume 5, pp. 209–235. [Google Scholar]
- Abd El Baki, H.M.; Fujimaki, H.; Tokumoto, I.; Saito, T. A new scheme to optimize irrigation depth using a numerical model of crop response to irrigation and quantitative weather forecasts. Comput. Electron. Agric. 2018, 150, 387–393. [Google Scholar] [CrossRef]
- Feddes, R.A.; Raats, P.A.C. Parameterizing the soil-water-plant root system, unsaturated-zone modeling: Progress, challenges, applications. In Wageningen UR Frontis Series; Feddes, R.A., de Rooij, G.H., van Dam, J.C., Eds.; Kluwer Academic: Dordrecht, The Netherlands, 2014; Volume 5. [Google Scholar]
- Allen, R.; Pereira, L.; Raes, D.; Smith, M. Crop Evapotranspiration: Guidelines for Computing Crop Water Requirements. FAO Irrigation and Drainage Paper No. 56; FAO: Rome, Italy, 1998; pp. 135–142. [Google Scholar]
- van Genuchten, M.T. A Numerical Model for Water and Solute Movement in and Below the Root Zone, Reserch Report 121, U.S. Salinity Laboratory, Agricultural Research Service; United States Department of Agriculture: Riverside, CA, USA, 1987.
- Weather and Disaster, Chugoku, Tottori, Eastern Tottori, Iwami-Cho. Available online: https://weather.yahoo.co.jp/weather/jp/31/6910/31302.html (accessed on 2 September 2019).
- Cornish, G.; Bosworth, B.; Perry, C. Water Charging in Irrigated Agriculture—An Analysis of International Experience; FAO: Rome, Italy, 2004; pp. 19–26. [Google Scholar]
- Yanagawa, A.; Fujimaki, H. Tolerance of canola to drought and salinity stresses in terms of root water uptake model parameters. J. Hydrol. Hydromech. 2013, 61, 73–80. [Google Scholar] [CrossRef]
- Westgate, M.E. Managing Soybeans for Photosynthetic Efficiency. In Proceedings of the 4th World Soybean Reserch Conference, Chicago, IL, USA, 4–7 August 1999; Kauffman, H.E., Ed.; pp. 223–228. [Google Scholar]
- Abd El Baki, H.M.; Fujimaki, H.; Tokumoto, I.; Saito, T. Determination of irrigation depths using a numerical model of crop growth and quantitative weather forecast and evaluation of its effect through a field experiment for potato. J. Jpn. Soc. Soil Phys. 2017, 136, 15–24. [Google Scholar]
- Abd El Baki, H.M.; Fujimaki, H.; Tokumoto, I.; Saito, T. Optimizing Irrigation Depth Using a Plant Growth Model and Weather Forecast. JAS 2018, 10, 55–66. [Google Scholar] [CrossRef]
- Sinclair, T.R. Water and Nitrogen Limitations in Soybean Grain Production. Field Crop. Res. 1986, 15, 125–141. [Google Scholar] [CrossRef]
- Haile, F.; Higley, L.; Specht, J.; Spomer, S. Soybean leaf morphology and defoliation tolerance. Agron. J. 1998, 90, 353–362. [Google Scholar] [CrossRef]
- Conley, S.P.; Pedersen, P.; Christmas, E.P. Main-stem node removal effect on soybean seed yield and composition. Agron. J. 2009, 101, 120–123. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Remark | ||
|---|---|---|---|
| Equation (10) | |||
| 0.12 | 30 | 2 | |
| Equation (11) | |||
| 40 | −0.4 | 5 | |
| Equation (12) | |||
| −100 | −3000 | 3 | |
| Treatment | Mass Grain Yield | Crop Height | AGB | LAI |
|---|---|---|---|---|
| g | cm | g | ||
| Treatment A | 47.3 ± 2.2 | 35.9 ± 0.4 | 9.2 ± 1.3 | 1.4 ± 0.2 |
| Treatment S | 57.8 ± 2.7 * | 37.4 ± 2.3 | 13.2 ± 1.7 | 1.9 ± 0.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abd El Baki, H.M.; Raoof, M.; Fujimaki, H. Determining Irrigation Depths for Soybean Using a Simulation Model of Water Flow and Plant Growth and Weather Forecasts. Agronomy 2020, 10, 369. https://doi.org/10.3390/agronomy10030369
Abd El Baki HM, Raoof M, Fujimaki H. Determining Irrigation Depths for Soybean Using a Simulation Model of Water Flow and Plant Growth and Weather Forecasts. Agronomy. 2020; 10(3):369. https://doi.org/10.3390/agronomy10030369
Chicago/Turabian StyleAbd El Baki, Hassan M., Majid Raoof, and Haruyuki Fujimaki. 2020. "Determining Irrigation Depths for Soybean Using a Simulation Model of Water Flow and Plant Growth and Weather Forecasts" Agronomy 10, no. 3: 369. https://doi.org/10.3390/agronomy10030369
APA StyleAbd El Baki, H. M., Raoof, M., & Fujimaki, H. (2020). Determining Irrigation Depths for Soybean Using a Simulation Model of Water Flow and Plant Growth and Weather Forecasts. Agronomy, 10(3), 369. https://doi.org/10.3390/agronomy10030369