Visco-Hyperelastic Model with Damage for Simulating Cyclic Thermoplastic Elastomers Behavior Applied to an Industrial Component

 ,
, 
Abstract
1. Introduction
- Spring and Maxwell model in parallel [33].
- Kelvin or Voigt model in which the two elements (spring and damper) are connected in parallel [34].
- Zener standard linear model obtained by adding a spring element in series to the Kelvin model [33].
- Burgers four element model obtained by combining Maxwell and Kelvin models in series [33].
- More complex models with multiple elements that combine the preceding more elementary models to reproduce real materials [35].
2. State of the Art Review
2.1. Linear Elastic Model
2.2. Hyperelastic Models
2.3. Visco-Hyperelastic Model
2.4. Ogden-Roxburgh Damage Model
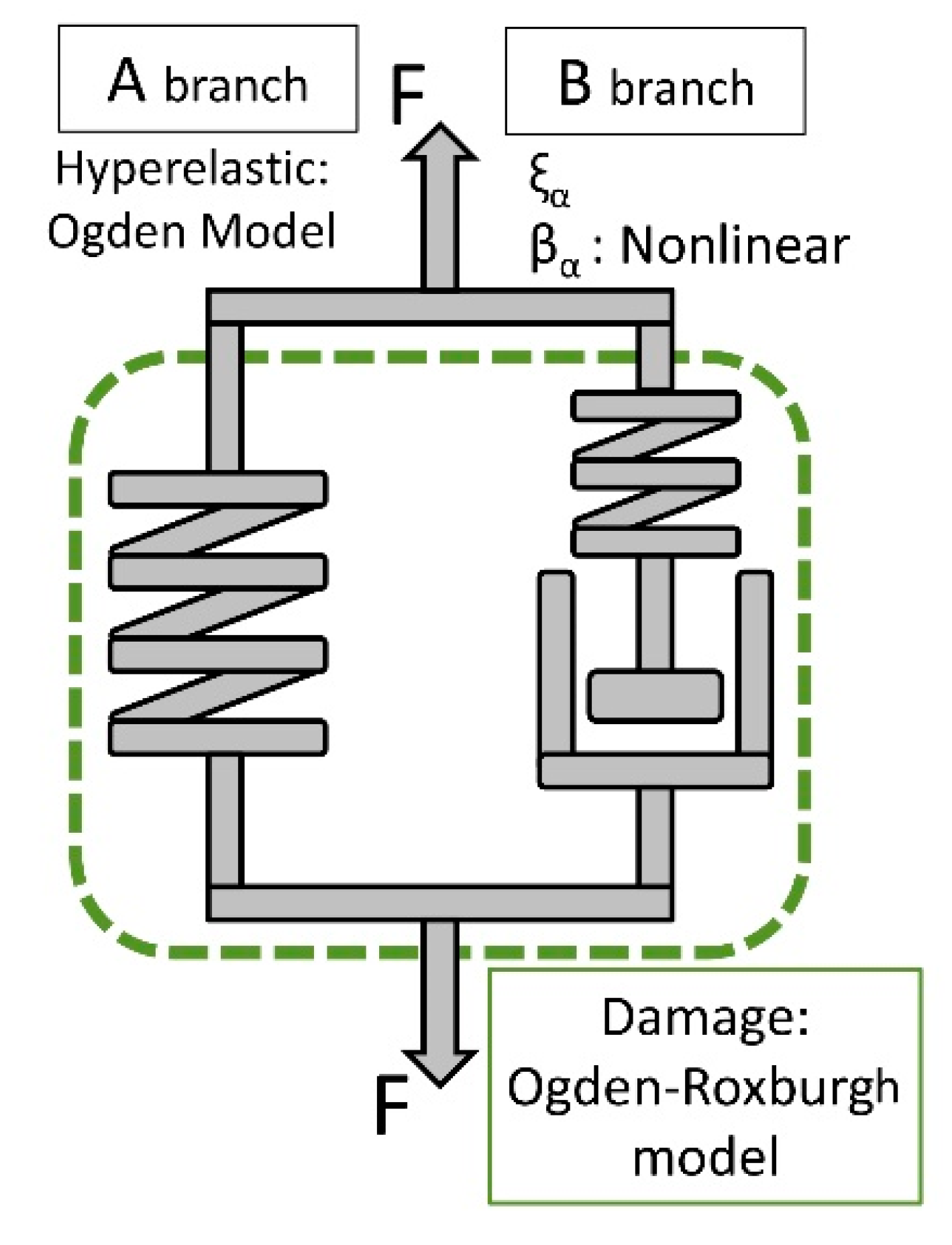
3. Proposed Visco-Hyperelastic Model with Damage
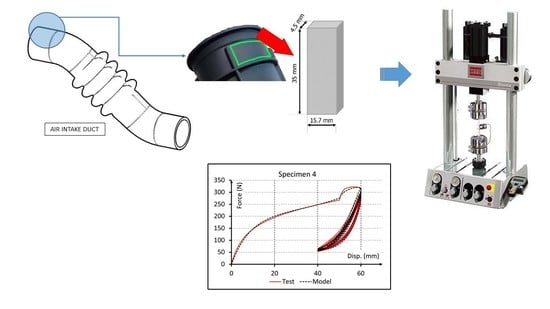
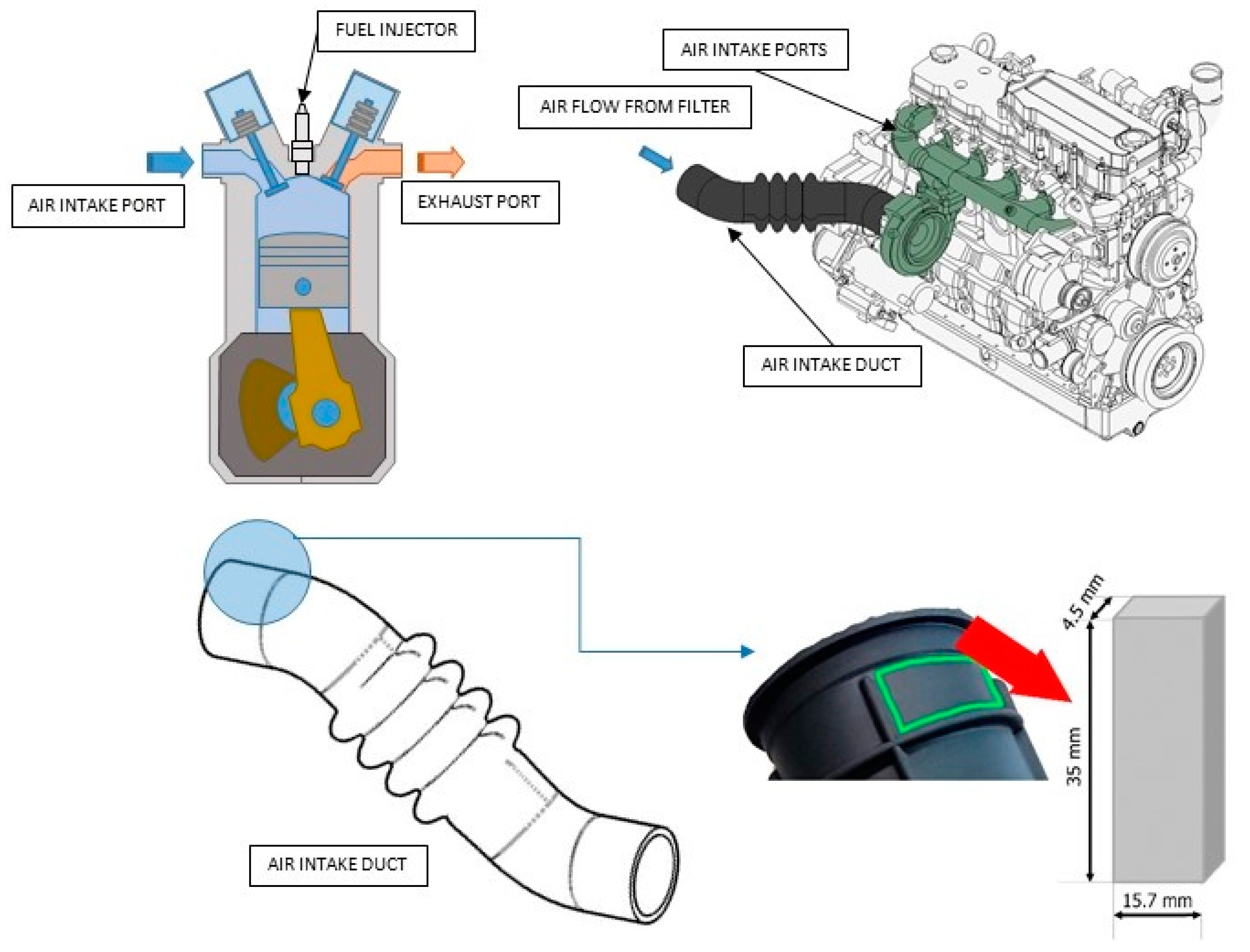
4. Experimental Tests
4.1. Material
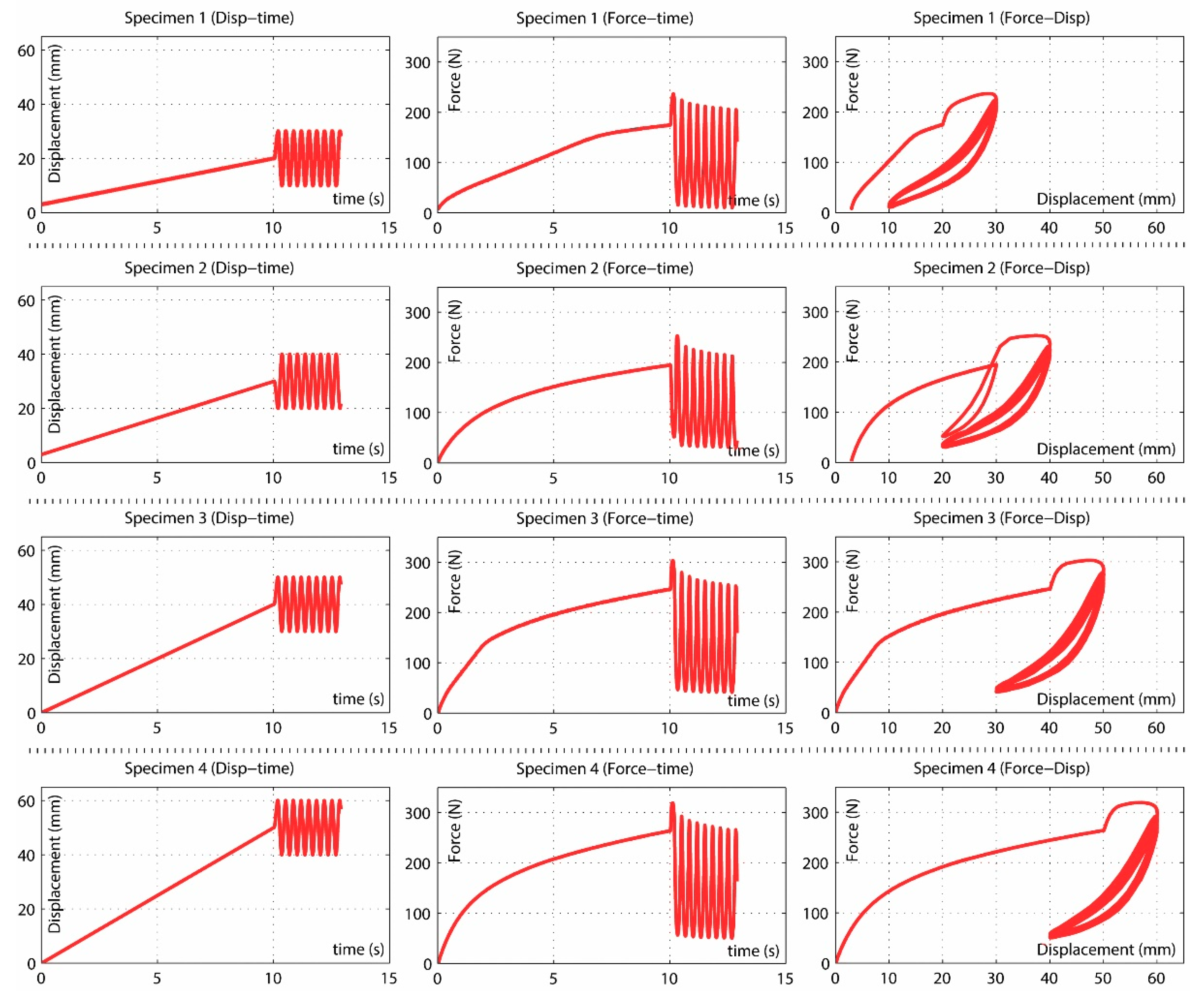
4.2. Experiments
- The relation between stress and strain of the specimens in the first deformation cycle is non-linear.
- Before the maximum deformation is reached an abrupt change in the slope of the force-displacement curve is observed.
- The behavior is non-linear in subsequent cycles after the first deformation cycle.
- After the first deformation cycle, the force requested to induce the previous deformation happens to diminish notably.
- With increasing number of cycles, the applied force steadily reduces showing an asymptotic trend to a fixed value for a high number of applied cycles. Supposedly, this phenomenon can be attributed to the viscoelastic character of the material.
- Independently of the specimen tested, the force-displacement curve practically stabilizes after about 10,000 cycles.
- It follows that residual strains may induce specimens entering the plastic deformation regime.
5. Fitting of Model Parameters from Experimental Data
5.1. Elastic Model
5.2. Hyperelastic Model
5.3. Visco-Hyperelastic Model
5.4. Ogden-Roxburgh Damage Model
5.5. New proposed Model
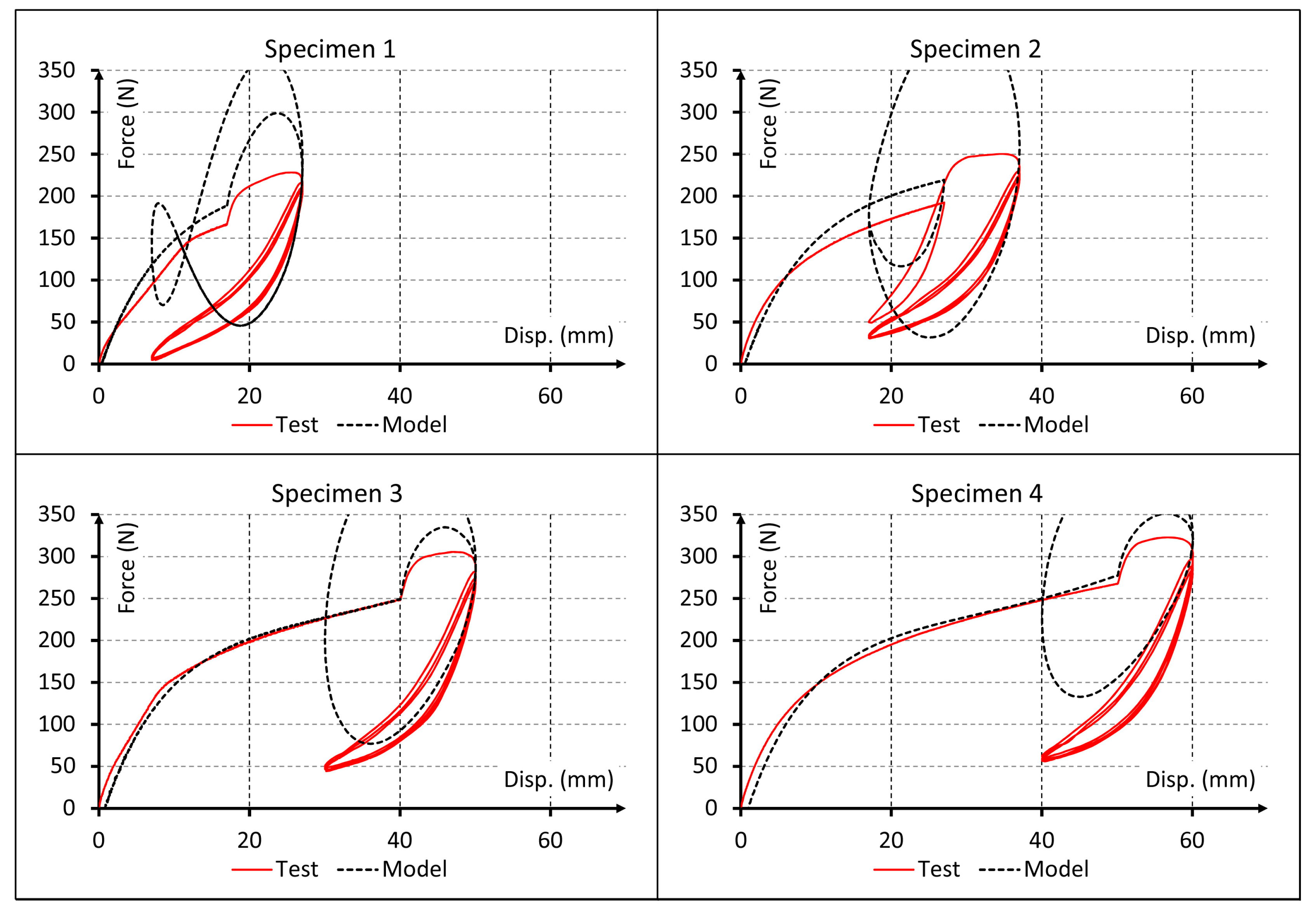
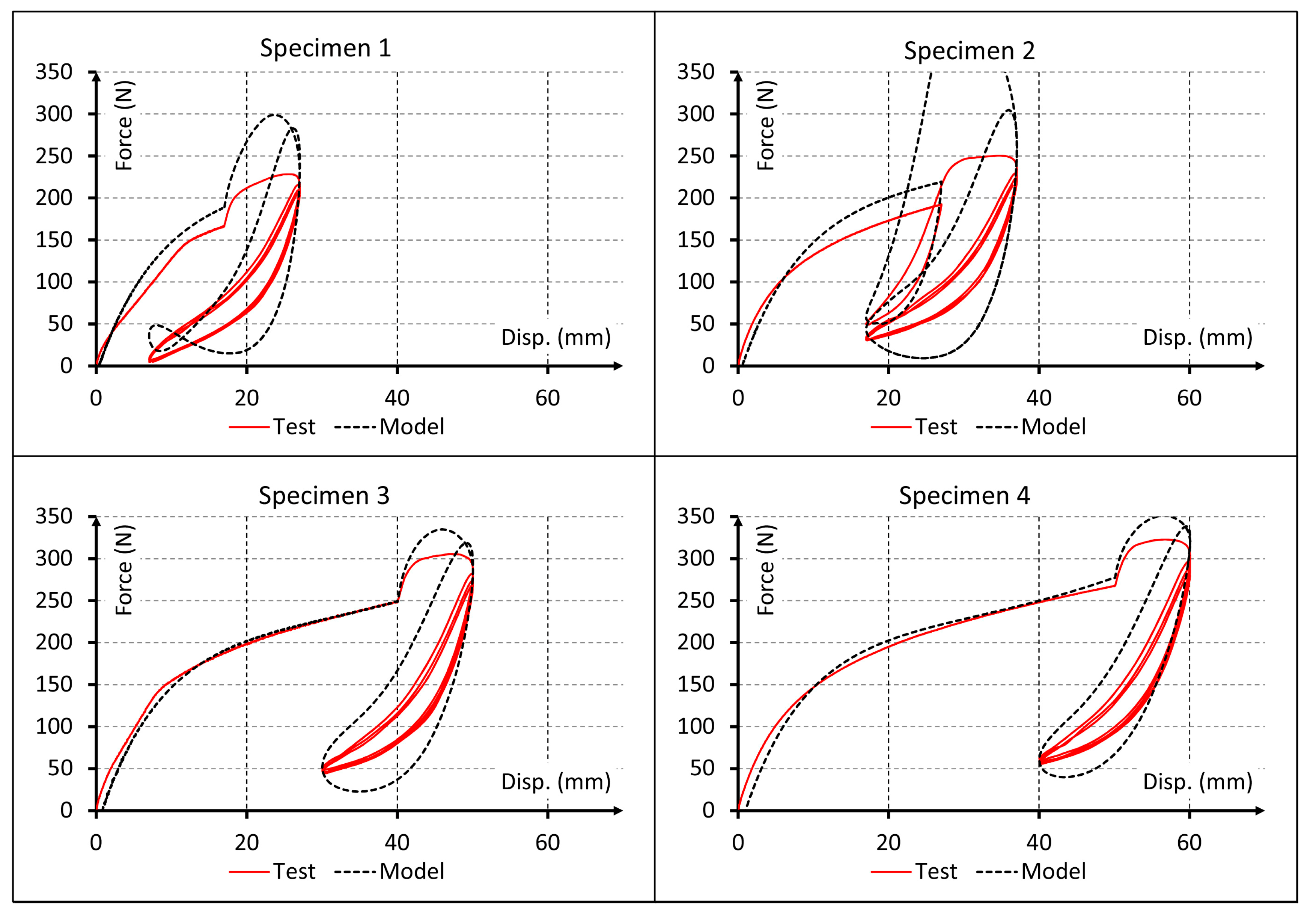
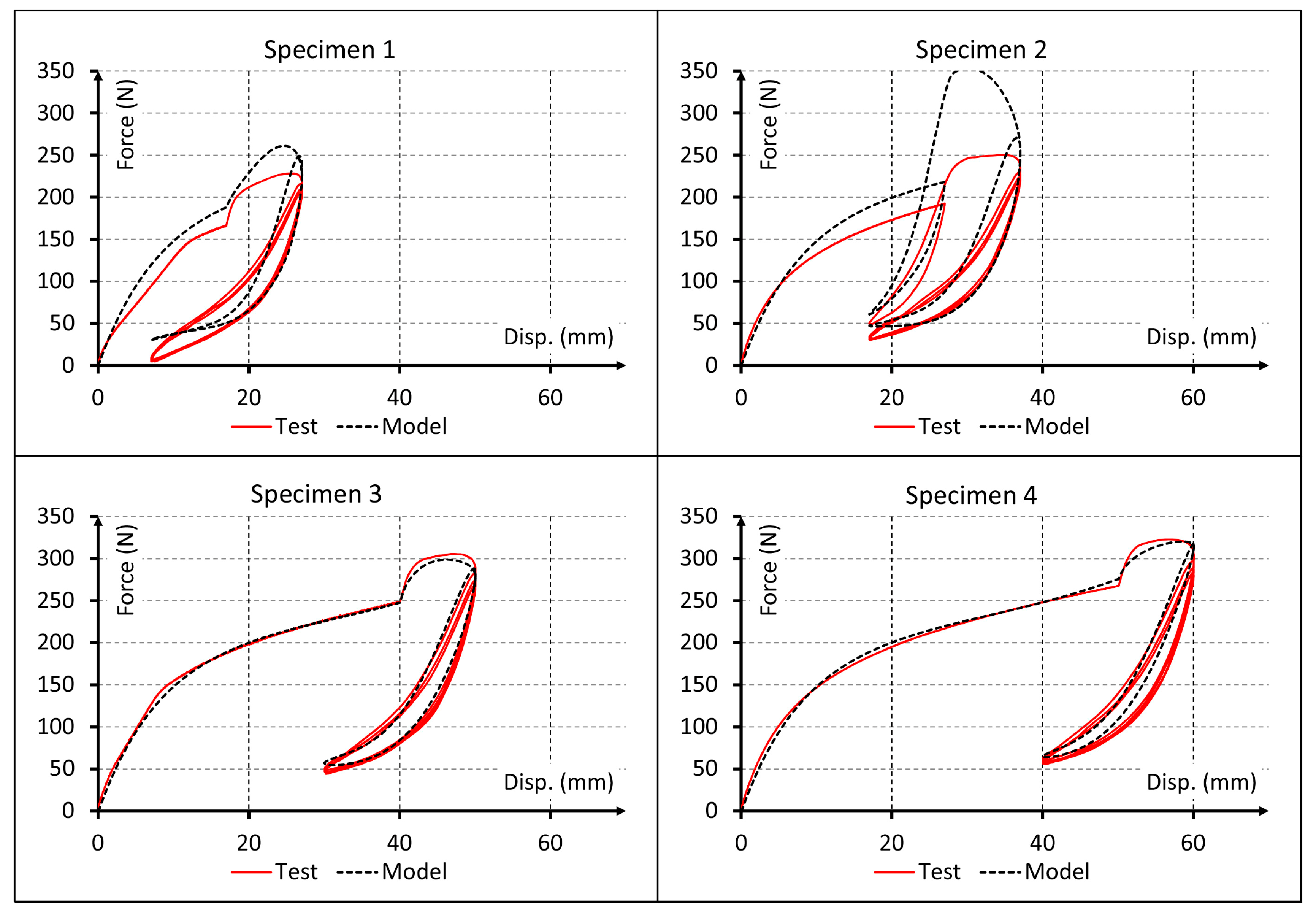
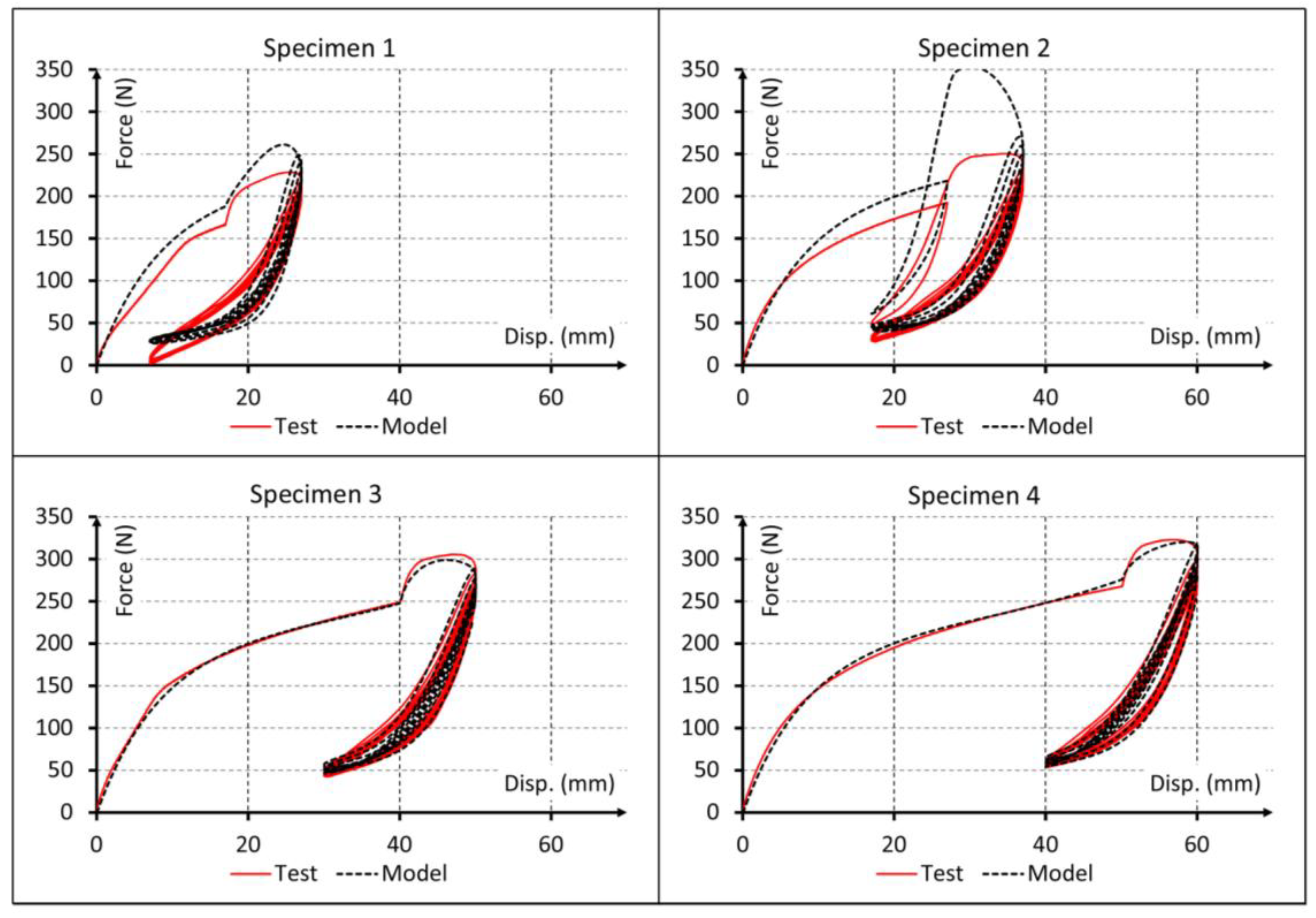
6. Results
- Linear elastic model as described in Section 2.1.
- Hyperelastic behavior, applying the Ogden model as described in Section 2.2.
- Visco-hyperelastic model as described in Section 2.2 and Section 2.3.
- Visco-hyperelastic model with Ogden-Roxburgh damage model as described in Section 2.4.
- Proposed visco-hyperelastic model with damage as described in Section 3.
7. Discussion
8. Conclusions
9. Future Lines of Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dufton, P.W. Thermoplastic Elastomers; iSmithers Rapra Publishing: Akron, OH, USA, 2001. [Google Scholar]
- Delogu, M.; Del Pero, F.; Pierini, M. Lightweight design solutions in the automotive field: Environmental modelling based on fuel reduction value applied to diesel turbocharged vehicles. Sustainability 2016, 8. [Google Scholar] [CrossRef]
- Koltzenburg, S.; Maskos, M.; Nuyken, O. Elastomers. In Polymer Chemistry; Springer: Berlin, Germany, 2017; pp. 477–491. ISBN 978-3-662-49279-6. [Google Scholar]
- Rodgers, B. Rubber Compounding: Chemistry and Applications; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Yoon, S.H.; Winters, M.; Siviour, C.R. High strain-rate tensile characterization of EPDM rubber using non-equilibrium loading and the virtual fields method. Exp. Mech. 2016, 56, 25–35. [Google Scholar] [CrossRef]
- Feng, X.; Li, Z.; Wei, Y.; Chen, Y.; Kaliske, M.; Zopf, C.; Behnke, R. A novel method for constitutive characterization of the mechanical properties of uncured rubber. J. Elastom. Plast. 2016, 48, 523–534. [Google Scholar] [CrossRef]
- Bergström, J.S.; Boyce, M.C. Large strain time-dependent behaviour of filled elastomers. Mech. Mater. 2000, 32, 627–644. [Google Scholar] [CrossRef]
- Charlton, D.J.; Yang, J.; Teh, K.K. A Review of methods to characterize rubber elastic behaviour for use in finite element analysis. Rubber Chem. Technol. 1994, 67, 481–503. [Google Scholar] [CrossRef]
- Cho, H.; Mayer, S.; Pöselt, E.; Susoff, M.; in’t Veld, P.J.; Rutledge, G.C.; Boyce, M.C. Deformation mechanisms of thermoplastic elastomers: Stress-strain behaviour and constitutive modeling. Polymer 2017, 128, 87–99. [Google Scholar] [CrossRef]
- Carbary, L.D.; Kimberlain, J.H.; Oliva, J.C. Hyperelastic material model selection of structural silicone sealants for use in finite element modeling. In Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Cleveland, OH, USA, 6–9 August 2017; p. V001T02A001. [Google Scholar]
- Diani, J.; Fayolle, B.; Gilormini, P. A review on the Mullins effect. Eur. Polym. J. 2009, 45, 601–612. [Google Scholar] [CrossRef]
- Gil-Negrete, N.; Alonso, A. Constitutive Models for Rubber VIII; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Simulia, D. ABAQUS 6.11 Analysis User’s Manual; SIMULIA: Johnston, RI, USA, 2011; Volume 6, p. 22. [Google Scholar]
- Ogden, R.W.; Roxburgh, D.G. A pseudo-elastic model for the Mullins effect in filled rubber. Proc. R. Soc. A Math. Phys. Eng. Sci. 1999, 455, 2861–2877. [Google Scholar] [CrossRef]
- De Tommasi, D.; Ferri, D.; Marano, G.C.; Puglisi, G. Material parameters identification and experimental validation of damage models for rubberlike materials. Eur. Polym. J. 2016, 78, 302–313. [Google Scholar] [CrossRef]
- Areias, P.; Matouš, K.; Matous, K. Finite element formulation for modeling nonlinear viscoelastic elastomers. Comput. Methods Appl. Mech. Eng. 2008, 197, 4702–4717. [Google Scholar] [CrossRef]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behaviour of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef]
- Fu, Y.B.; Ogden, R.W. Nonlinear Elasticity: Theory and Applications; Cambridge University Press: Cambridge, UK, 2001; Volume 283. [Google Scholar]
- Holzapfel, G.A.; Gasser, T.C. A viscoelastic model for fiber-reinforced composites at finite strains: Continuum basis, computational aspects and applications. Comput. Methods Appl. Mech. Eng. 2001, 190, 4379–4403. [Google Scholar] [CrossRef]
- Lin, R.C. On a nonlinear viscoelastic material law at finite strain for polymers. Mech. Res. Commun. 2001, 28, 363–372. [Google Scholar] [CrossRef]
- Mooney, M. A theory of large elastic deformation. J. Appl. Phys. 1940, 11, 582–592. [Google Scholar] [CrossRef]
- Ogden, R.W. Large deformation isotropic elasticity—On the correlation of theory and experiment for incompressible rubberlike solids. Proc. R. Soc. A Math. Phys. Eng. Sci. 1972, 326, 565–584. [Google Scholar] [CrossRef]
- Rivlin, R.S. Large elastic deformations of isotropic materials. IV. Further developments of the general theory. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 1948, 241, 379–397. [Google Scholar] [CrossRef]
- Treloar, L.R.G. The Physics of Rubber Elasticity; Oxford University Press: Cary, NC, USA, 1975. [Google Scholar]
- Yeoh, O.H. Some forms of the strain energy function for rubber. Rubber Chem. Technol. 1993, 66, 754–771. [Google Scholar] [CrossRef]
- Palacios-Pineda, L.M.; Perales-Martinez, I.A.; Lozano-Sanchez, L.M.; Martínez-Romero, O.; Puente-Córdova, J.; Segura-Cárdenas, E.; Elías-Zúñiga, A. Experimental investigation of the magnetorheological behaviour of PDMS elastomer reinforced with iron micro/nanoparticles. Polymers 2017, 9. [Google Scholar] [CrossRef]
- Tobajas, R.; Ibartz, E.; Gracia, L. A comparative study of hyperelastic constitutive models to characterize the behavior of a polymer used in automotive engines. In Proceedings of the 2nd International Electronic Conference on Materials, 2–16 May 2016; Volume 2, p. A002. [Google Scholar]
- Anani, Y.; Rahimi, G. Modeling of visco-hyperelastic behaviour of transversely isotropic functionally graded rubbers. Polym. Eng. Sci. 2016, 56, 342–347. [Google Scholar] [CrossRef]
- Jung, J.; Hwang, I.; Lee, D. Contact pressure and strain energy density of hyperelastic U-shaped monolithic seals under axial and radial compressions in an insulating joint: A numerical study. Appl. Sci. 2017, 7, 792. [Google Scholar] [CrossRef]
- Breche, Q.; Chagnon, G.; Machado, G.; Nottelet, B.; Garric, X.; Girard, E.; Favier, D. A non-linear viscoelastic model to describe the mechanical behaviour’s evolution of biodegradable polymers during hydrolytic degradation. Polym. Degrad. Stab. 2016, 131, 145–156. [Google Scholar] [CrossRef]
- Wu, Y.; Wang, H.; Li, A. Parameter identification methods for hyperelastic and hyper-viscoelastic models. Appl. Sci. 2016, 6, 386. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Lani, F.; Pardoen, T.; Morelle, X.P.; Noels, L. A large strain hyperelastic viscoelastic-viscoplastic-damage constitutive model based on a multi-mechanism non-local damage continuum for amorphous glassy polymers. Int. J. Solids Struct. 2016, 96, 192–216. [Google Scholar] [CrossRef]
- Ward, I.; Sweeney, J. Mechanical Properties of Solid Polymers; John Wiley & Sons: Hoboken, NJ, USA, 2012; Volume 13, ISBN 9038628064. [Google Scholar]
- Bai, Y.; Liu, C.; Huang, G.; Li, W.; Feng, S. A hyper-viscoelastic constitutive model for polyurea under uniaxial compressive loading. Polymers 2016, 8, 133. [Google Scholar] [CrossRef]
- Bonfitto, A.; Tonoli, A.; Amati, N. Viscoelastic dampers for rotors: Modeling and validation at component and system level. Appl. Sci. 2017, 7, 1181. [Google Scholar] [CrossRef]
- Aboudi, J. The effect of evolving damage on the finite strain response of inelastic and viscoelastic composites. Materials 2009, 2, 1858–1894. [Google Scholar] [CrossRef]
- Bolotin, V.V. Prediction of Service Life for Machines and Structures; American Society of Mechanical Engineers: New York, NY, USA, 1988. [Google Scholar]
- Grandcoin, J.; Boukamel, A.; Lejeunes, S. A micro-mechanically based continuum damage model for fatigue life prediction of filled rubbers. Int. J. Solids Struct. 2014, 51, 1274–1286. [Google Scholar] [CrossRef]
- De Tommasi, D.; Puglisi, G.; Saccomandi, G. A micromechanics-based model for the Mullins effect. J. Rheol. 2006, 50, 495–512. [Google Scholar] [CrossRef]
- Schapery, R.A. A micromechanical model for non-linear viscoelastic behaviour of particle-reinforced rubber with distributed damage. Eng. Fract. Mech. 1986, 25, 845–867. [Google Scholar] [CrossRef]
- Drozdov, A.D.; Dorfmann, A. A micro-mechanical model for the response of filled elastomers at finite strains. Int. J. Plast. 2003, 19, 1037–1067. [Google Scholar] [CrossRef]
- Mullins, L. Softening of rubber by deformation. Rubber Chem. Technol. 1969, 42, 339–362. [Google Scholar] [CrossRef]
- Miñano, M.; Montáns, F.J. A new approach to modeling isotropic damage for Mullins effect in hyperelastic materials. Int. J. Solids Struct. 2015, 67–68, 272–282. [Google Scholar] [CrossRef]
- Andriyana, A.; Loo, M.S.; Chagnon, G.; Verron, E.; Ch’ng, S.Y. Modeling the Mullins effect in elastomers swollen by palm biodiesel. Int. J. Eng. Sci. 2015, 95, 1–22. [Google Scholar] [CrossRef]
- Setiyana, B.; Wicahyo, F.D.; Ismail, R.; Jamari, J.; Schipper, D.J. Investigation on the elastic modulus of rubber-like materials by straight blade indentation using numerical analysis. Adv. Mater. Res. 2015, 1123, 55–58. [Google Scholar] [CrossRef]
- Li, Z.; Zhou, Z.; Li, Y.; Tang, S. Effect of cyclic loading on surface instability of silicone rubber under compression. Polymers 2017, 9, 148. [Google Scholar] [CrossRef]
- Safshekan, F.; Tafazzoli-Shadpour, M.; Abdouss, M.; Shadmehr, M.B. Mechanical characterization and constitutive modeling of human trachea: Age and gender dependency. Materials 2016, 9, 456. [Google Scholar] [CrossRef] [PubMed]
- Liao, B.; Sun, B.; Yan, M.; Ren, Y.; Zhang, W.; Zhou, K. Time-variant reliability analysis for rubber O-ring seal considering both material degradation and random load. Materials 2017, 10, 1211. [Google Scholar] [CrossRef] [PubMed]
- Felipe-Sesé, L.; López-Alba, E.; Hannemann, B.; Schmeer, S.; Diaz, F.A. A validation approach for quasistatic numerical/experimental indentation analysis in soft materials using 3D digital image correlation. Materials 2017, 10, 722. [Google Scholar] [CrossRef] [PubMed]
- Uriarte, I.; Zulueta, E.; Guraya, T.; Arsuaga, M.; Garitaonandia, I.; Arriaga, A. Characterization of recycled rubber using particle swarm optimization techniques. Rubber Chem. Technol. 2015, 88, 343–358. [Google Scholar] [CrossRef]
- Liu, C.; Cady, C.M.; Lovato, M.L.; Orler, E.B. Uniaxial tension of thin rubber liner sheets and hyperelastic model investigation. J. Mater. Sci. 2015, 50, 1401–1411. [Google Scholar] [CrossRef]
- Horgan, C.O. The remarkable Gent constitutive model for hyperelastic materials. Int. J. Non Linear Mech. 2015, 68, 9–16. [Google Scholar] [CrossRef]
- Hariharaputhiran, H.; Saravanan, U. A new set of biaxial and uniaxial experiments on vulcanized rubber and attempts at modeling it using classical hyperelastic models. Mech. Mater. 2016, 92, 211–222. [Google Scholar] [CrossRef]
- Fahimi, S.; Baghani, M.; Zakerzadeh, M.-R.; Eskandari, A. Developing a visco-hyperelastic material model for 3D finite deformation of elastomers. Finite Elem. Anal. Des. 2018, 140, 1–10. [Google Scholar] [CrossRef]
- Exxon Mobil Technical Datasheet: Santoprene 101-73 Thermoplastic Vulcanizate 2014; Mobil: Irving, TX, USA, 2014.
- Whelan, A. Polymer Technology Dictionary; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Chandima Chathuranga Somarathna, H.M.; Raman, S.N.; Badri, K.H.; Mutalib, A.A.; Mohotti, D.; Ravana, S.D. Quasi-static behaviour of palm-based elastomeric polyurethane: For strengthening application of structures under impulsive loadings. Polymers 2016, 8, 202. [Google Scholar] [CrossRef]
- Piesowicz, E.; Paszkiewicz, S.; Szymczyk, A. Phase separation and elastic properties of poly(trimethylene terephthalate)-blockpoly(ethylene oxide) copolymers. Polymers 2016, 8, 237. [Google Scholar] [CrossRef]
- Luo, R.K.; Zhou, X.; Tang, J. Numerical prediction and experiment on rubber creep and stress relaxation using time-dependent hyperelastic approach. Polym. Test. 2016, 52, 246–253. [Google Scholar] [CrossRef]
- MTS System Corporation. Available online: http://www.mts.com/en/index.htm (accessed on 19 March 2018).
- Beda, T. An approach for hyperelastic model-building and parameters estimation a review of constitutive models. Eur. Polym. J. 2014, 50, 97–108. [Google Scholar] [CrossRef]
- Mihai, L.A.; Budday, S.; Holzapfel, G.A.; Kuhl, E.; Goriely, A. A family of hyperelastic models for human brain tissue. J. Mech. Phys. Solids 2017, 106, 60–79. [Google Scholar] [CrossRef]
- Stumpf, F.T.; Marczak, R.J. Characterization of constitutive parameters for hyperelastic models considering the Baker-Ericksen inequalities. In Advanced Structured Materials; CRC Press: Boca Raton, FL, USA, 2016; Volume 49, pp. 375–393. [Google Scholar]
- Balaban, G.; Alnæs, M.S.; Sundnes, J.; Rognes, M.E. Adjoint multi-start-based estimation of cardiac hyperelastic material parameters using shear data. Biomech. Model. Mechanobiol. 2016, 15, 1509–1521. [Google Scholar] [CrossRef] [PubMed]
- MATLAB and Statistics Toolbox; The MathWorks Inc.: Natick, MA, USA, 2010; ISBN 0885-7458.
- Pelteret, J.P.; Walter, B.; Steinmann, P. Application of metaheuristic algorithms to the identification of nonlinear magneto-viscoelastic constitutive parameters. J. Magn. Magn. Mater. 2018, 464, 116–131. [Google Scholar] [CrossRef]
- Pawlikowski, M. Non-linear constitutive model for the oligocarbonate polyurethane material. Chin. J. Polym. Sci. (Engl. Ed.) 2014, 32, 1666–1677. [Google Scholar] [CrossRef]
- Goh, S.M.; Charalambides, M.N.; Williams, J.G. Determination of the constitutive constants of non-linear viscoelastic materials. Mech. Time-Depend. Mater. 2004, 8, 255–268. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Samples | Displacements | |
|---|---|---|
| Min. Displacement | Max. Displacement | |
| Sample 1 | 10 (mm) | 30 (mm) |
| Sample 2 | 20 (mm) | 40 (mm) |
| Sample 3 | 30 (mm) | 50 (mm) |
| Sample 4 | 40 (mm) | 60 (mm) |
| Parameter | Value |
|---|---|
| μ1 | 11.515 (MPa) |
| α1 | −1.979 (-) |
| μ2 | 19.930 (MPa) |
| α2 | 0.062 (-) |
| μ3 | −27.425 (MPa) |
| α3 | 0.173 (-) |
| Parameter | Value |
|---|---|
| τα | 0.01 (s) |
| βα | −50 (-) |
| Parameter | Value |
|---|---|
| r | 1.338 (-) |
| m | 0.236 (MPa) |
| β | 0.116 (-) |
| Parameter | Value |
|---|---|
| τα | 0.01 (s) |
| δα | −50 (-) |
| κ | 0.7 (MPa) |
| Computed by Equation (14) (MPa) | |
| η | Computed by Equation (12) (-) |
| Models | Sample 1 | Sample 2 | Sample 3 | Sample 4 | Average |
|---|---|---|---|---|---|
| Elastic model | 0.498 | 0.291 | 0.206 | 0.202 | 0.299 |
| Hyperelastic model | 0.539 | 0.371 | 0.331 | 0.316 | 0.389 |
| Visco-hyperelastic model | 0.548 | 0.400 | 0.347 | 0.348 | 0.411 |
| Visco-hyperelastic with Ogden-Roxburgh damage model | 0.889 | 0.860 | 0.876 | 0.915 | 0.885 |
| Proposed model | 0.972 | 0.979 | 0.986 | 0.976 | 0.978 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tobajas, R.; Elduque, D.; Ibarz, E.; Javierre, C.; Canteli, A.F.; Gracia, L. Visco-Hyperelastic Model with Damage for Simulating Cyclic Thermoplastic Elastomers Behavior Applied to an Industrial Component. Polymers 2018, 10, 668. https://doi.org/10.3390/polym10060668
Tobajas R, Elduque D, Ibarz E, Javierre C, Canteli AF, Gracia L. Visco-Hyperelastic Model with Damage for Simulating Cyclic Thermoplastic Elastomers Behavior Applied to an Industrial Component. Polymers. 2018; 10(6):668. https://doi.org/10.3390/polym10060668
Chicago/Turabian StyleTobajas, Rafael, Daniel Elduque, Elena Ibarz, Carlos Javierre, Alfonso F. Canteli, and Luis Gracia. 2018. "Visco-Hyperelastic Model with Damage for Simulating Cyclic Thermoplastic Elastomers Behavior Applied to an Industrial Component" Polymers 10, no. 6: 668. https://doi.org/10.3390/polym10060668
APA StyleTobajas, R., Elduque, D., Ibarz, E., Javierre, C., Canteli, A. F., & Gracia, L. (2018). Visco-Hyperelastic Model with Damage for Simulating Cyclic Thermoplastic Elastomers Behavior Applied to an Industrial Component. Polymers, 10(6), 668. https://doi.org/10.3390/polym10060668