1. Introduction
The relationships between solar radiance and emitted thermal radiative energy are important for infrared stealth technology. Radiated solar energy (6000 K) heats an object, which then radiates thermal energy according to Planck’s law [
1]. One of the core technologies in infrared stealth research is to measure the surface temperature of a remote object.
The surface temperature of an object is independent of the wavelength, and can be estimated from even a single spectral band with a known atmospheric transmissivity and surface emissivity. In addition, the atmospheric conditions are crucial for surface temperature estimation [
2]. The atmospheric weather conditions (e.g., temperature, humidity) change dynamically on earth, which leads to wide variations of spectral transmissivity. An incorrect atmospheric transmissivity hinders remote temperature estimation. Many studies have been conducted to measure remote temperature as correctly as possible.
Conventional approaches usually require an atmospheric correction to remotely estimate the temperature [
3]. A previous study proposed a temperature estimation using single-channel infrared information and known atmospheric transmissivity [
4]. A single band-based temperature emissivity separation (TES) was applied to estimate absolute land surface temperature from the MODerate resolution atmospheric TRANsmission (MODTRAN) -based atmospheric transmissivity information [
2]. A single channel-based temperature estimation is impractical because of the inaccurate atmospheric profile information.
A two-channel-based method such as a split window algorithm can estimate the surface temperature as a linear function of two brightness temperatures [
5]. Although the split-window method does not require information on the atmospheric transmissivity at the time of the temperature measurement, it requires accurate differential water vapor absorption in two adjacent thermal infrared channels [
6].
A four channel-based surface temperature estimation method was proposed in Reference [
7]. They reported an improved surface temperature estimation using three longwave thermal channels (8.7, 10.8, 12.0
m) and one midwave thermal channel (3.9
m) compared to the split window methods.
A multi-channel method was proposed using longwave hyperspectral thermal infrared for high-emissivity surfaces [
8]. They used ten manually selected channels and applied a least square minimization to estimate the parameters. The multi-channel method [
9] was improved by considering thirty-six channels and unknown emissivity in a linear system [
8].
An accurate remote surface temperature estimation is difficult under dynamically varying weather conditions. The above-mentioned approaches (1-channel, 2-channel, 4-channel, and multi-channel) have their own advantages and disadvantages. These methods work if the specific conditions are satisfied, such as the known atmospheric transmissivity, known water vapor contents, and known surface emissivity. On the other hand, they cannot guarantee the temperature accuracy if the required atmospheric information is unavailable online or the weather conditions change abruptly.
In this paper, the problem of a remote surface temperature estimation in a dynamic weather environment is solved by focusing on the sensor, database (DB), and deep learning scheme. A new hyperspectral thermal infrared camera (HYPER-CAM MWE, TELOPS, Quebec, QC, Canada) was adopted to analyze both the solar radiance and thermal radiation in the 1.5–5.5 m band. This hyperspectral camera can provide 374 spectral bands with a calibrated spectral radiance. A dynamic weather database was recorded three times a day (10:00, 13:00, and 15:00) for 7 months to cover a wide range of atmospheric variations in a coastal environment. The proposed surface temperature-deep convolutional neural network (ST-DCNN) can estimate the temperatures by learning the network on a huge spectral DB.
The remainder of this paper is organized as follows.
Section 2 introduces the background of Fourier transform infrared (FTIR)-based brightness temperature measurement process.
Section 3 explains the overall structure of the paper, including the hyperspectral database construction method and deep convolutional neural network-based temperature estimation with the ST-DCNN.
Section 4 evaluates the remote surface temperature estimation performance of the proposed method by comparing it with the baseline methods. The paper is concluded in
Section 5.
3. Proposed Temperature Estimation: ST-DCNN
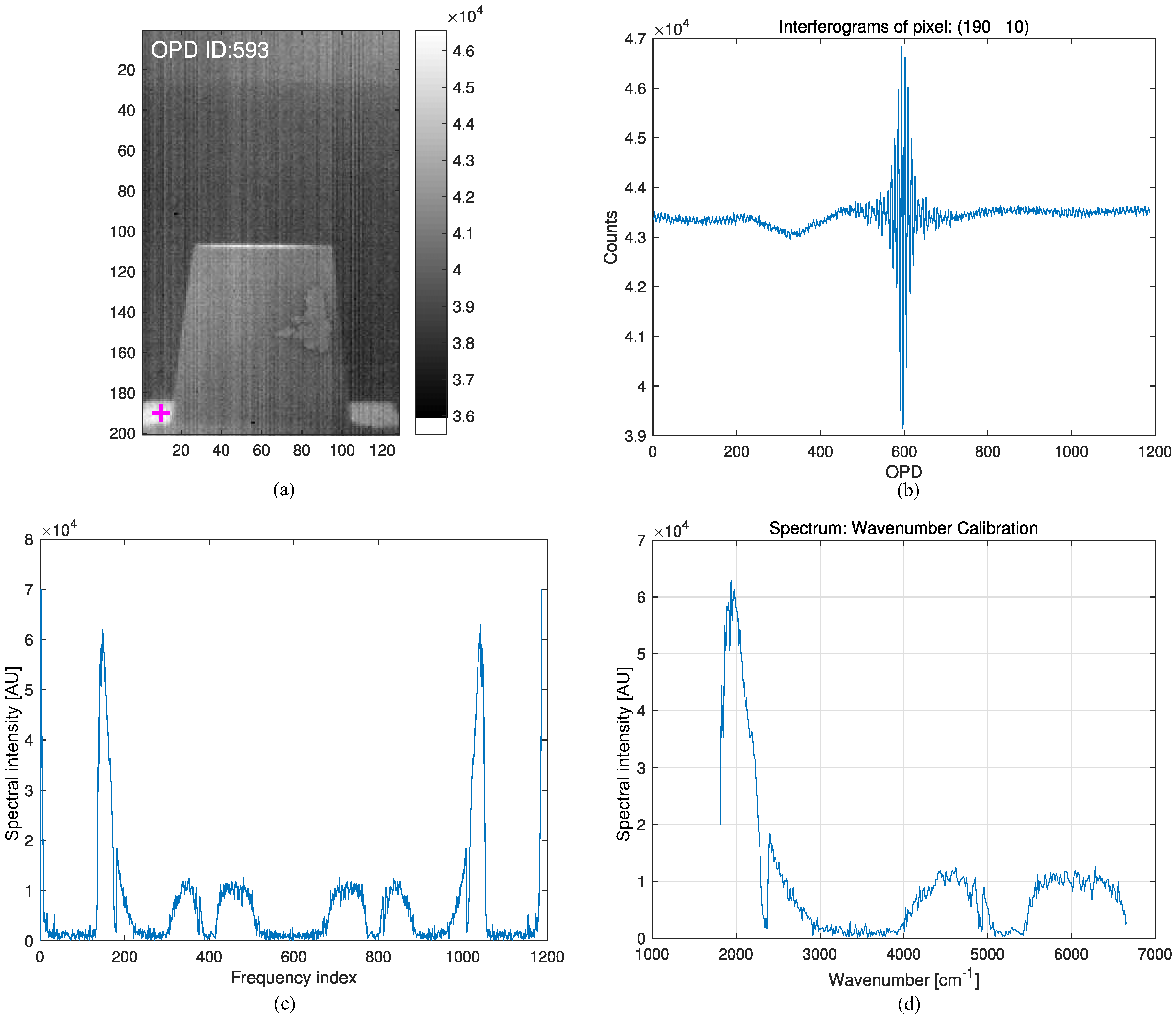
An evaluation of thermal infrared stealth property is important for various applications, such as ships, cars, and houses. This paper focuses on the effects of solar radiation on objects. As shown in
Figure 6 (top row), the sun heats up the surface of an object painted with specially developed materials. After 20 min (thermal equilibrium), the heated surface is rotated by
and radiates thermal energy (
Figure 6, bottom row), which is measured by an FTIR detector. Note that the solar radiation (6000 K) is dominant in the higher wavenumber band (short wavelength region: 1.5–3.0
m, or 3333–6667 cm
) and the energy is used to heat the surface (approximately 0–40
) of an object as indicated by the cross point. Therefore, the radiation by the heated surface is dominant in the lower wavenumber band (mid-wavelength region: 3.6–5.5
m, or 1818–2778 cm
). The strength of the solar radiation in the shadowed region (opposite side of the direct sun) decreased to 10%–20%.
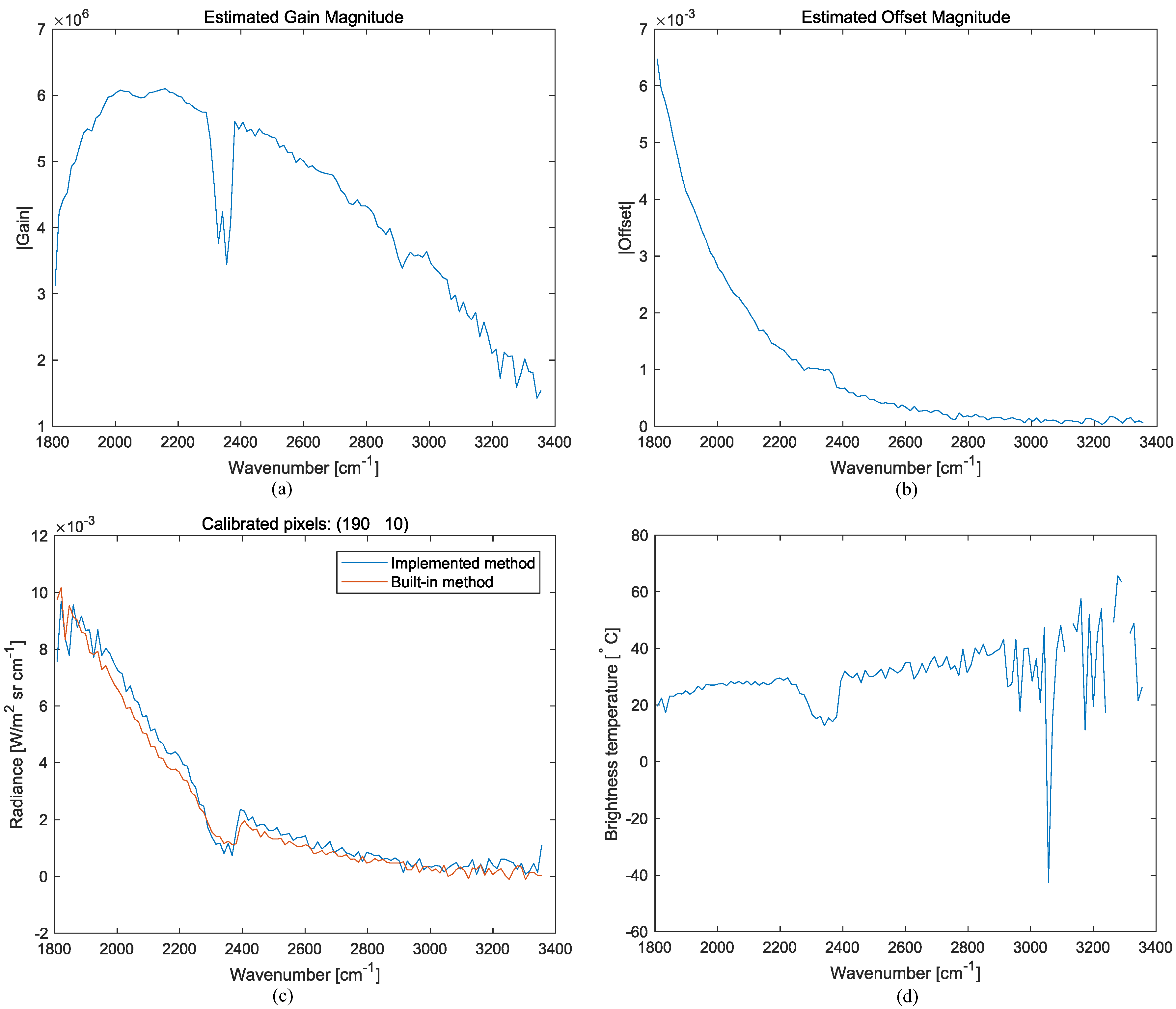
In remote surface temperature sensing, the infrared spectral radiance at the FTIR detector can be represented by radiative transfer, as per Equation (
10):
where
is the surface spectral emissivity,
is the transmissivity at the FTIR detector, and
represents the thermal path radiance [
18]. The surface temperature (
T) can be estimated from the spectral radiance (
) if the object emissivity, atmospheric transmissivity, and path radiance are available. On the other hand, the environmental parameters are difficult to estimate in real-time due to the wide variations of weather conditions.
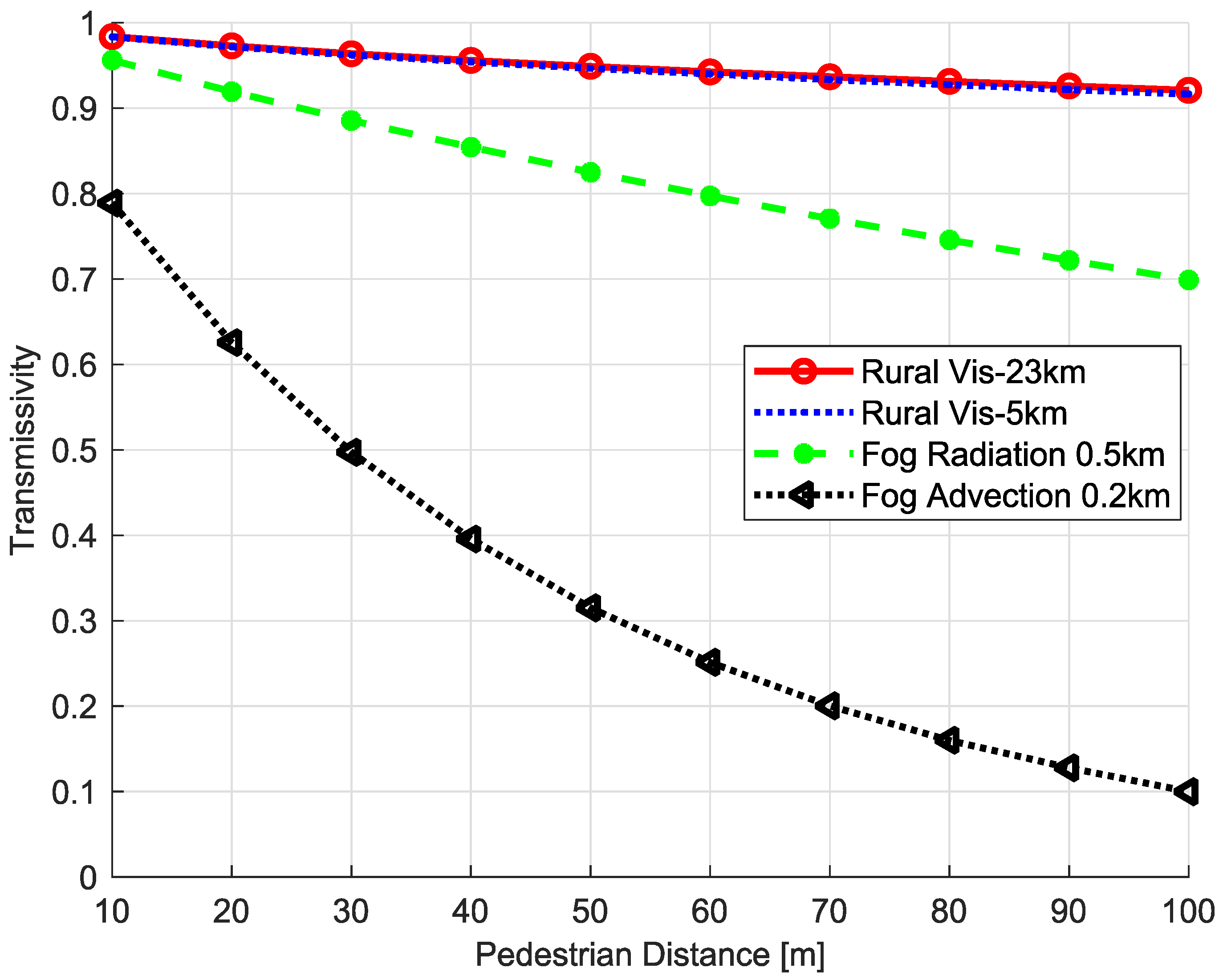
Figure 7 gives an example of atmospheric transmissivity according to the object distance and weather conditions. Therefore, the one-channel method (atmospheric transmissivity is required), two-channel method (water vapor content is required), and multi-channel method (surface emissivity is required) are not applicable.
The key ideas are based on three aspects. First, a midwave thermal hyperspectral imager (HYPER-CAM MWE) is adopted to extract the spectral information. The midwave thermal hyperspectral images usually show lower sensitivity than longwave thermal hyperspectral images on the surface emissivity in a remote temperature estimation [
19]. The surface emissivity can affect the temperature estimation. The low sensitivity means that the uncertainty of emissivity produces low uncertainty in temperature estimation. On a normal surface, the typical values of emissivity for MWIR are approximately 0.90–0.95. Second, the imager can acquire huge hyperspectral radiance and a temperature database at various times (10:00, 13:00, 15:00), seasons (winter, spring, summer), and weather conditions (clear, cloudy, foggy). Third, a novel surface temperature-deep convolutional neural network (ST-DCNN) was adopted to estimate the remote surface temperatures by learning the network with huge spectral radiance DB (equivalently, brightness temperature DB).
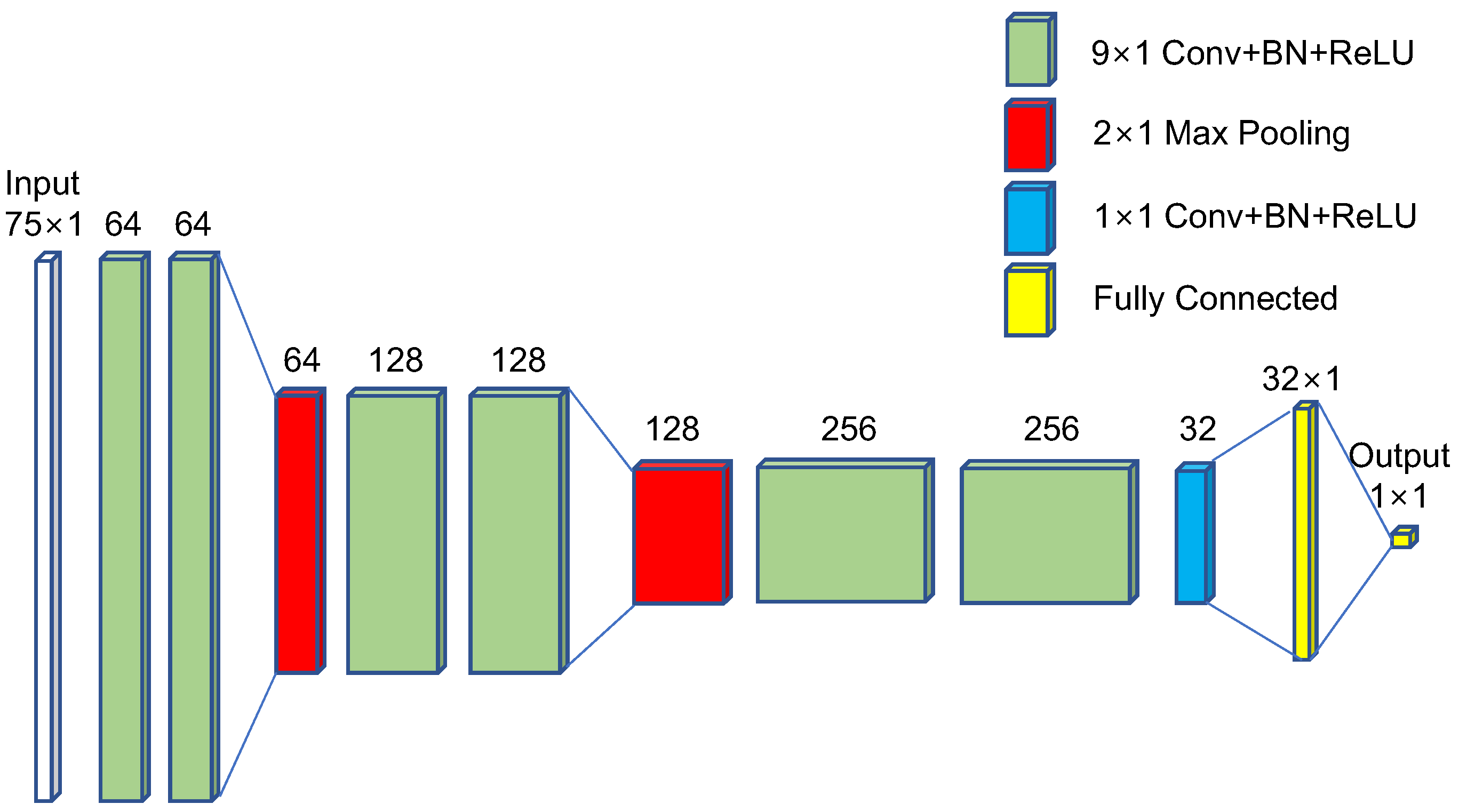
The proposed ST-DCNN consisted of 27 layers, as shown in
Figure 8. The input data size was
, corresponding to the midwave band (1807–2270 cm
or 3.6–5.5
m). Two
convolutions with 64 filters, batch normalization (BN), and rectified linear unit (ReLU) were conducted to extract the temperature features in the spectral domain. The
max pooling can reduce the dimensions by removing the redundant features. Such processes (except for the last layer-
Conv + BN + ReLU) were repeated twice to extract the higher spectral temperature. A
convolution was used to reduce the channel size with the same spectral feature size. The last two fully connected layers were used to regress the physical surface temperature. L2 norm was used to calculate the loss.
4. Experimental Results
The TELOPS HYPER-CAM MWE model was used in this study, as shown in
Figure 9. This model can provide a high-resolution spectrum by a Michelson interferometer (TELOPS, Quebec, QC, Canada) from the midwave to the shortwave band. The noise equivalent spectral radiance (NESR) is 7
and the radiometric accuracy is approximately 2 K.
The object surface was painted with a gray color and was located in a coastal area with a 78 m distance to the FTIR sensor system. The object surface data were acquired from 1 December–30 June, three times a day (10:00, 13:00, 15:00) with 75 spectral bands (3.6–5.5
m), as shown in
Table 1.
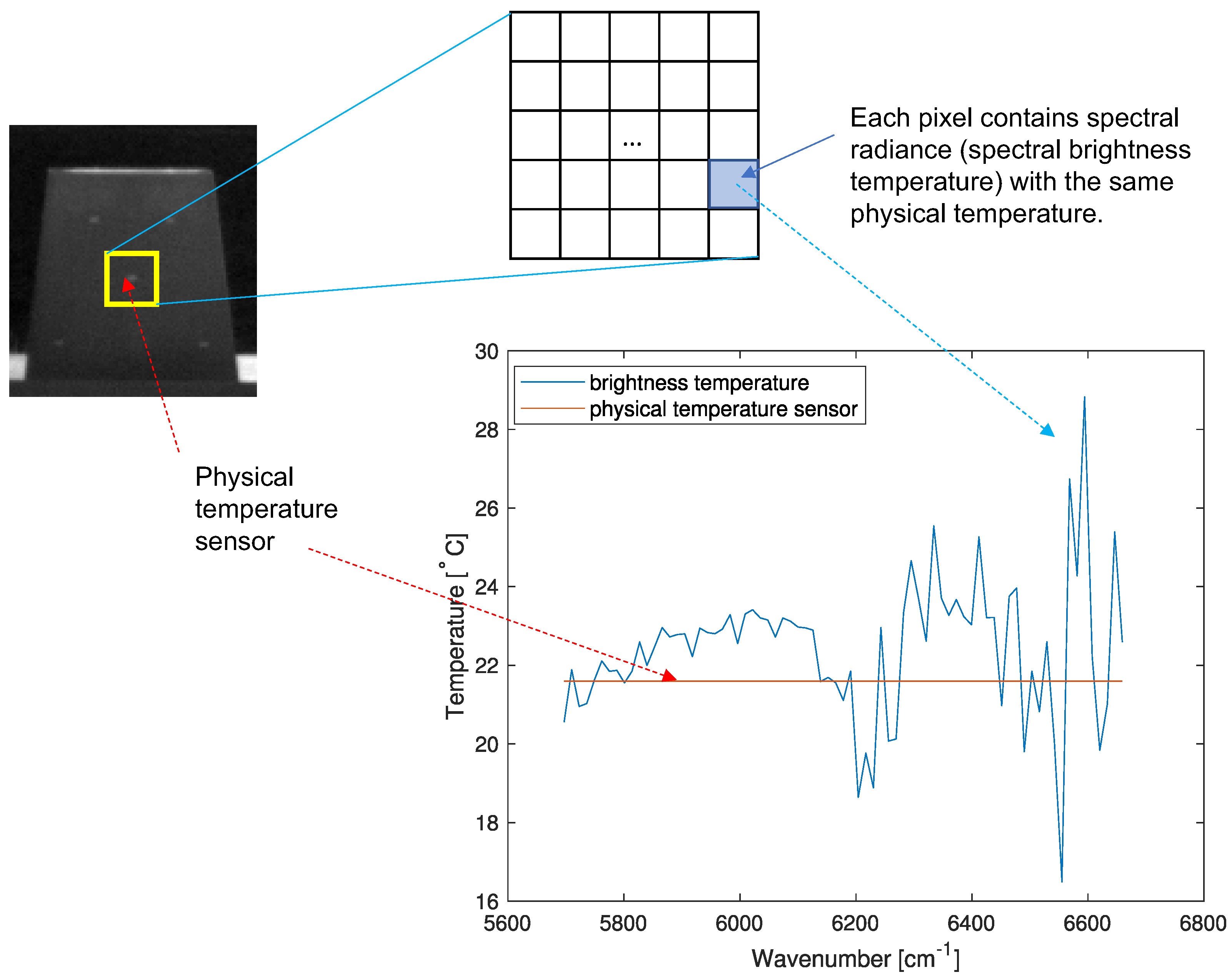
Figure 10 presents an example of data preparation for deep learning. The brightness temperature data were extracted at the center region (
) and the built-in temperature sensor on the object surface provided the corresponding ground truth temperature information. Therefore, 400 brightness temperature profiles had the same physical temperature.
Table 2 presents details of the spectral brightness temperature for deep learning. The number of valid hyperspectral images was 208, where each image provides 400 spectral brightness temperature profiles. The total number of spectrum–temperature pairs was 82,400, and the DB was divided into three groups: training (
), validation (
), and testing (
).
Figure 11 shows the weather variations for the 208 hyperspectral images acquired from 1 December 2017–30 June 2018 in terms of the air temperature, relative humidity, and solar radiation. The air temperature ranged from −10 to
C, the relative humidity varied from 20% to 100%, and the solar radiation varied from 0 to 1000 W/m
.
The proposed ST-DCNN consisted of 27 layers that were optimized to produce the best regression performance, as shown in
Table 3. The number of pooling layers was two, where the max pooling showed better performance than the average pooling. The VGG-style convolutions with the kernel size 9 showed the best root mean square error (RMSE) among the kernel sizes (3, 5, 7, 9, 11, and 13). Additional batch normalization was helpful, and drop-out was useless. A
convolution was used to reduce the feature dimension, and the regression performance was upgraded if the
convolution was inserted at the end of the last Conv–BN–ReLU stage. The best performance was seen with 32 fully connected layers, among 8, 16, 32, 64, and 128.
Figure 12 shows the training process with the optimized network parameters. Approximately seven minutes were needed to train the ST-DCNN with a mini-batch size of 128, max epochs of 30, initial learning rate of
, learning rate drop factor of 0.2, learning rate drop period of 20, and shuffle in every epoch.
The proposed ST-DCNN-based temperature estimation method was compared with the multi-layer perceptron (MLP) [
20] and mean brightness temperature [
19]. The MLP consisted of two hidden layers with 128 nodes.
Figure 13 shows the partial results tested on the unlearned 8240 samples.
Figure 13b is an enlarged graph of
Figure 13a. Note that the proposed ST-DCNN could predict the true temperatures better than the other methods.
Table 4 lists the quantitative comparison results in terms of the RMSE measures. The RMSE value of the direct temperature estimation using the mean brightness temperature was 2.0934
C and that of the MLP was 1.7863
C. The proposed ST-DCNN showed an RMSE of 1.1446
C. This was improved by 45.32% compared to the base method (mean brightness temperature (BT)). Note that the RMSE of the brightness temperature method was similar to the manufacturer’s radiometric accuracy (2 K). Although the RMSE of the proposed ST-DCNN was approximately 1.14
C, it was reasonably accurate considering the wide weather variations along the three seasons, as shown in
Figure 11.
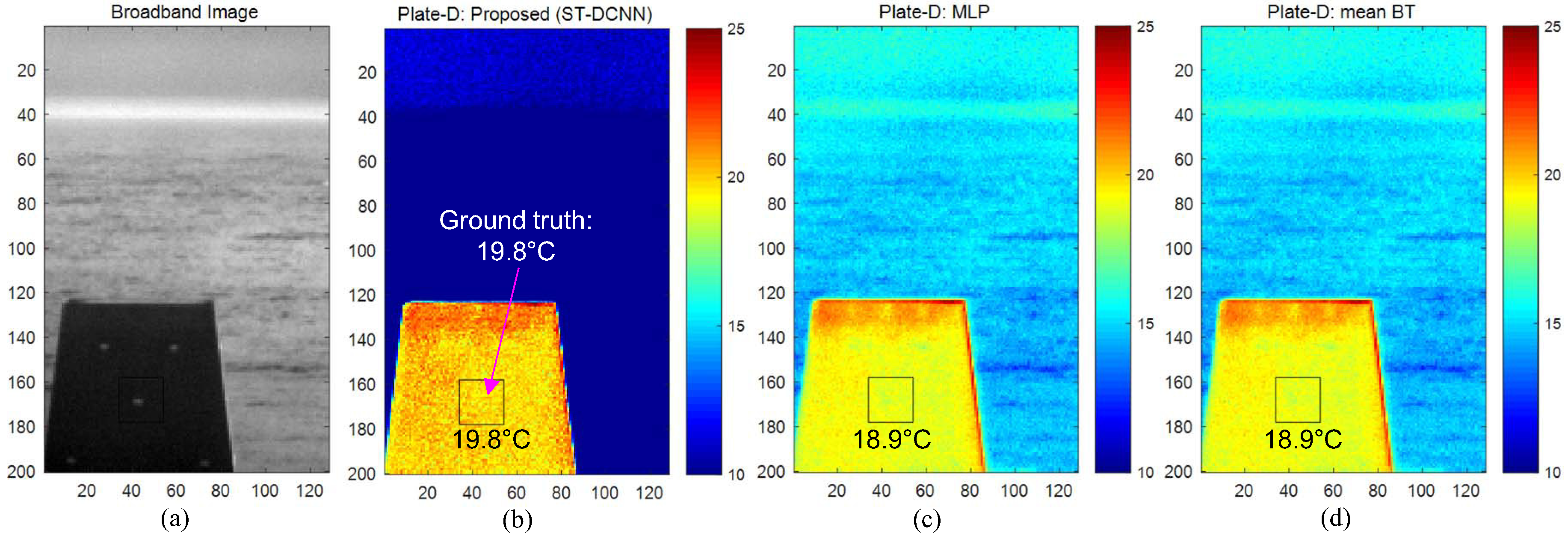
Figure 14 presents the remote temperature estimation results for March 29, 15:00 DB. The ground truth temperature of the center region was
C, and the proposed ST-DCNN predicted correctly. On the other hand, the MLP and mean BT methods estimated incorrectly by
C.
One of many applications of remote temperature estimation is to check the thermal stealth effect of different types of paint on ships, buildings, etc. by solar radiation.
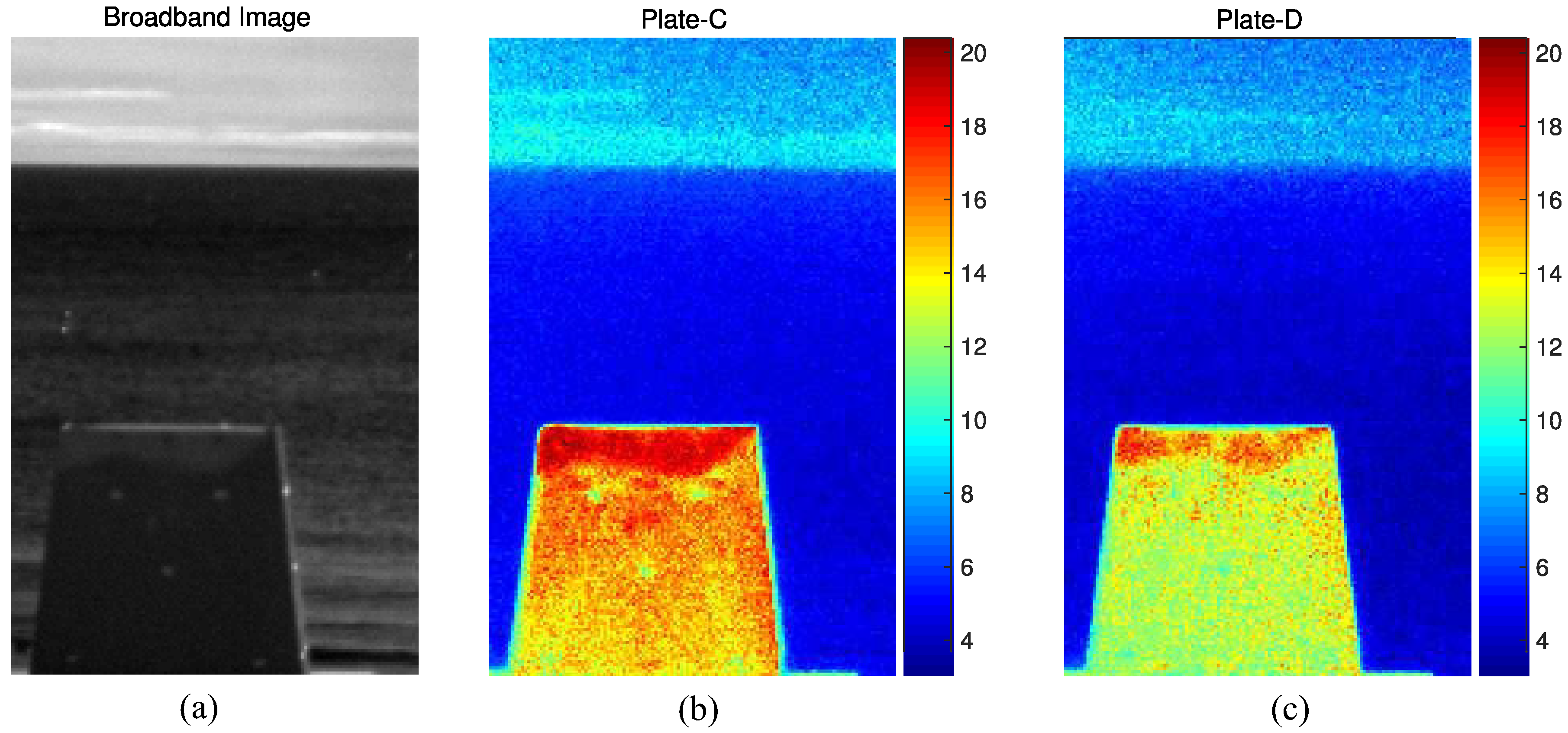
Figure 15 shows a quantitative visualization of the physical surface temperature on an object. The surface temperature was estimated using the proposed ST-DCNN with the best network parameters.
Figure 15a represents a broadband image of the experimental environment imaged on 5 March 2018.
Figure 15b,c show the temperature distributions of Plate-C and Plate-D, respectively. Each plate was painted with different types of surface material. The weather conditions at 15:40 were as follows: atmospheric temperature
C, humidity
, and solar radiation 550 W/m
. The estimated average temperature of Plate-C was
C, whereas that of Plate-D was
C. Therefore, the paint on Plate-D had
C better thermal stealth capability. In addition, the physical temperature distribution of Plate-C and Plate-D could be compared.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}