
Rotational Efficiency of Photo-Driven Archimedes Screws for Micropumps


Abstract
:1. Introduction
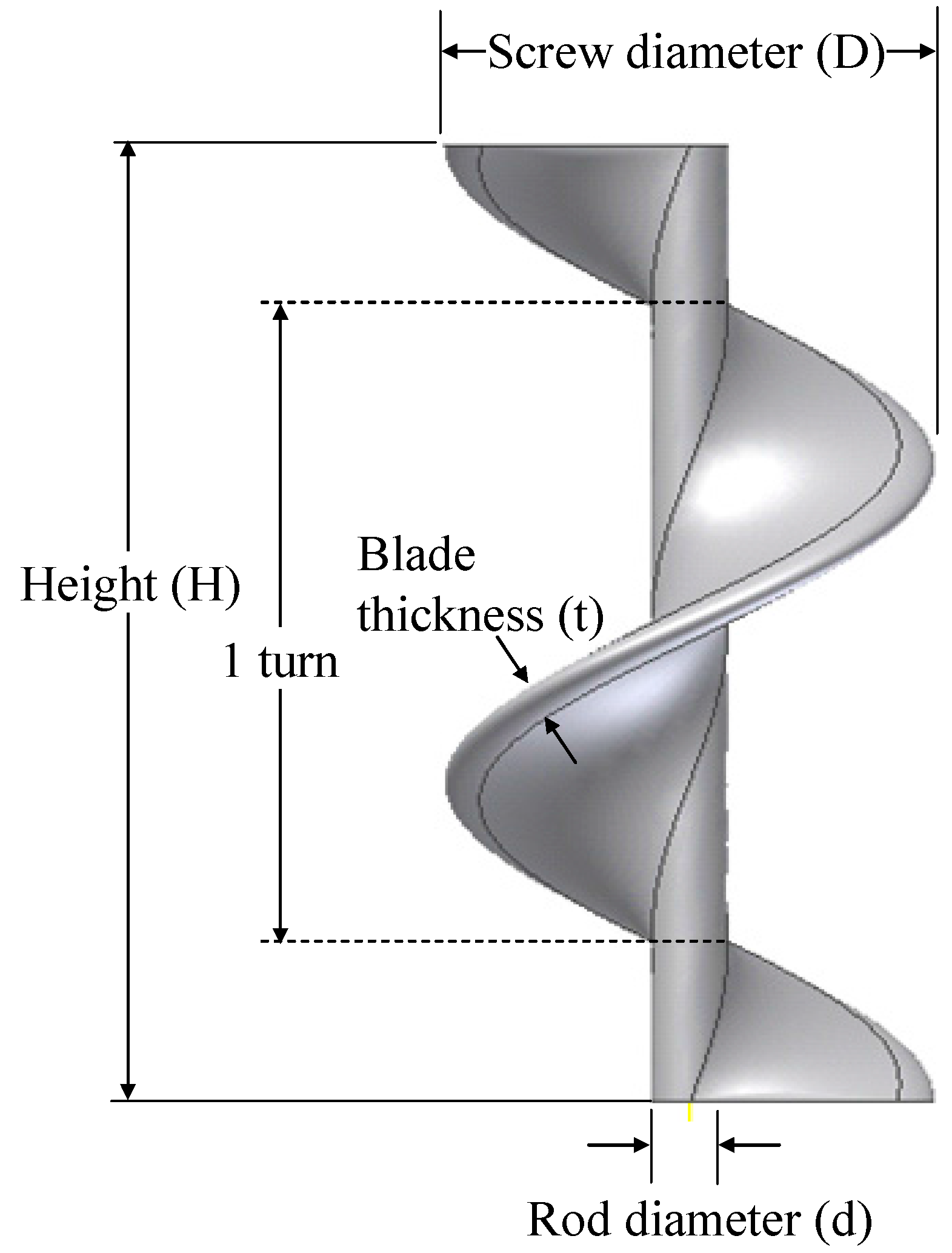
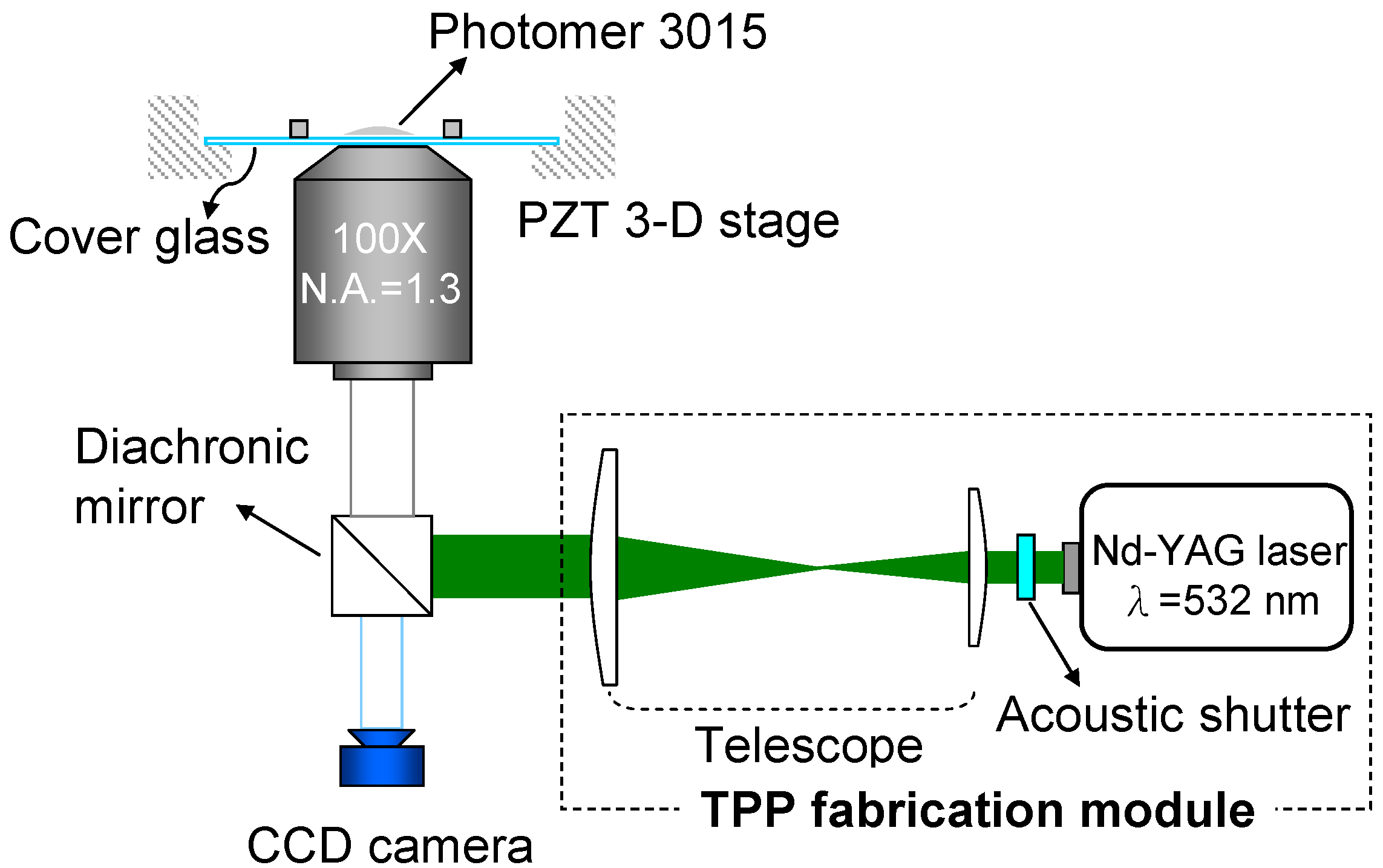
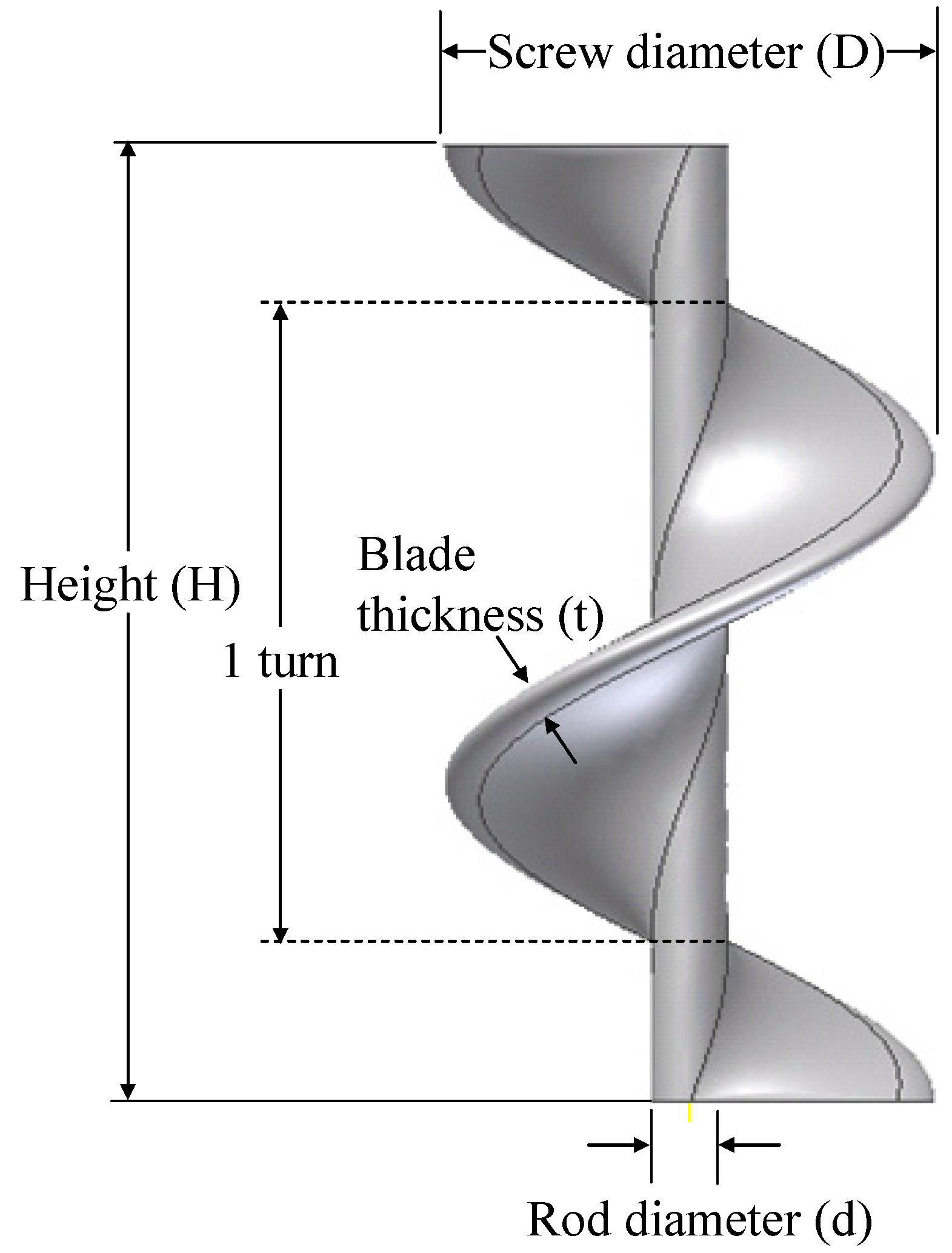
2. Fabrication of Archimedes Micro-Screw


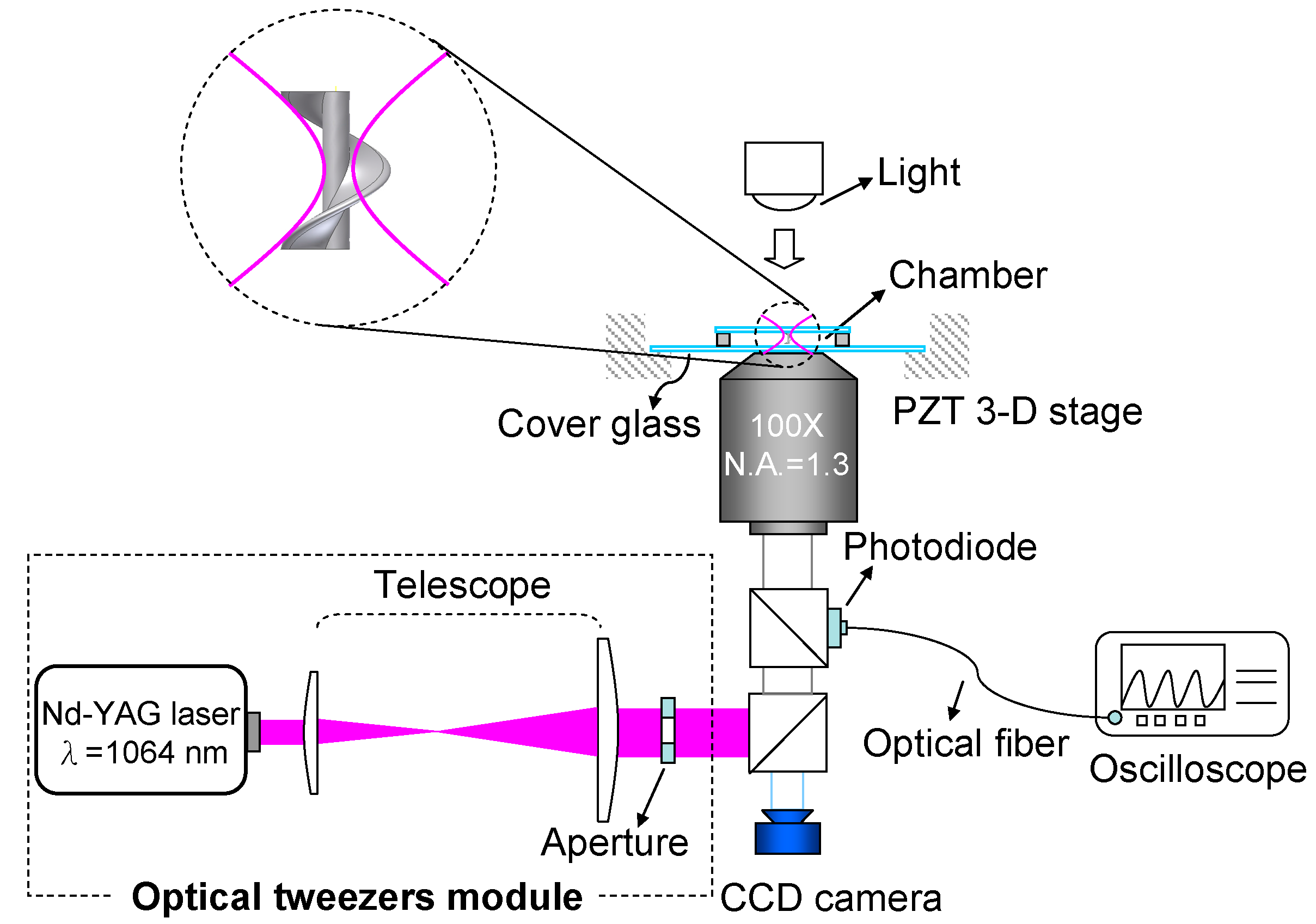
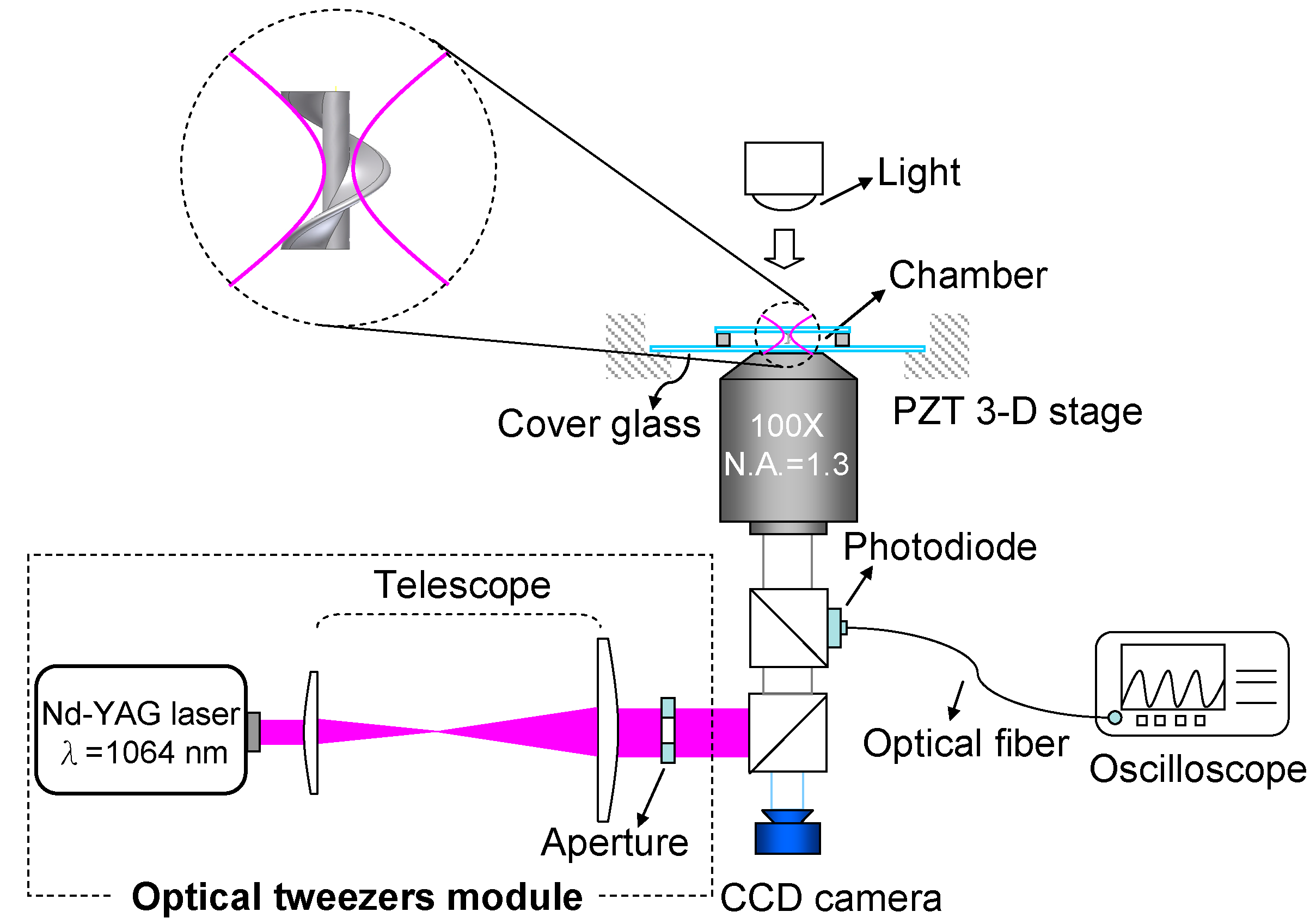
3. Demonstration of Photo-Driven Archimedes Micro-Screws
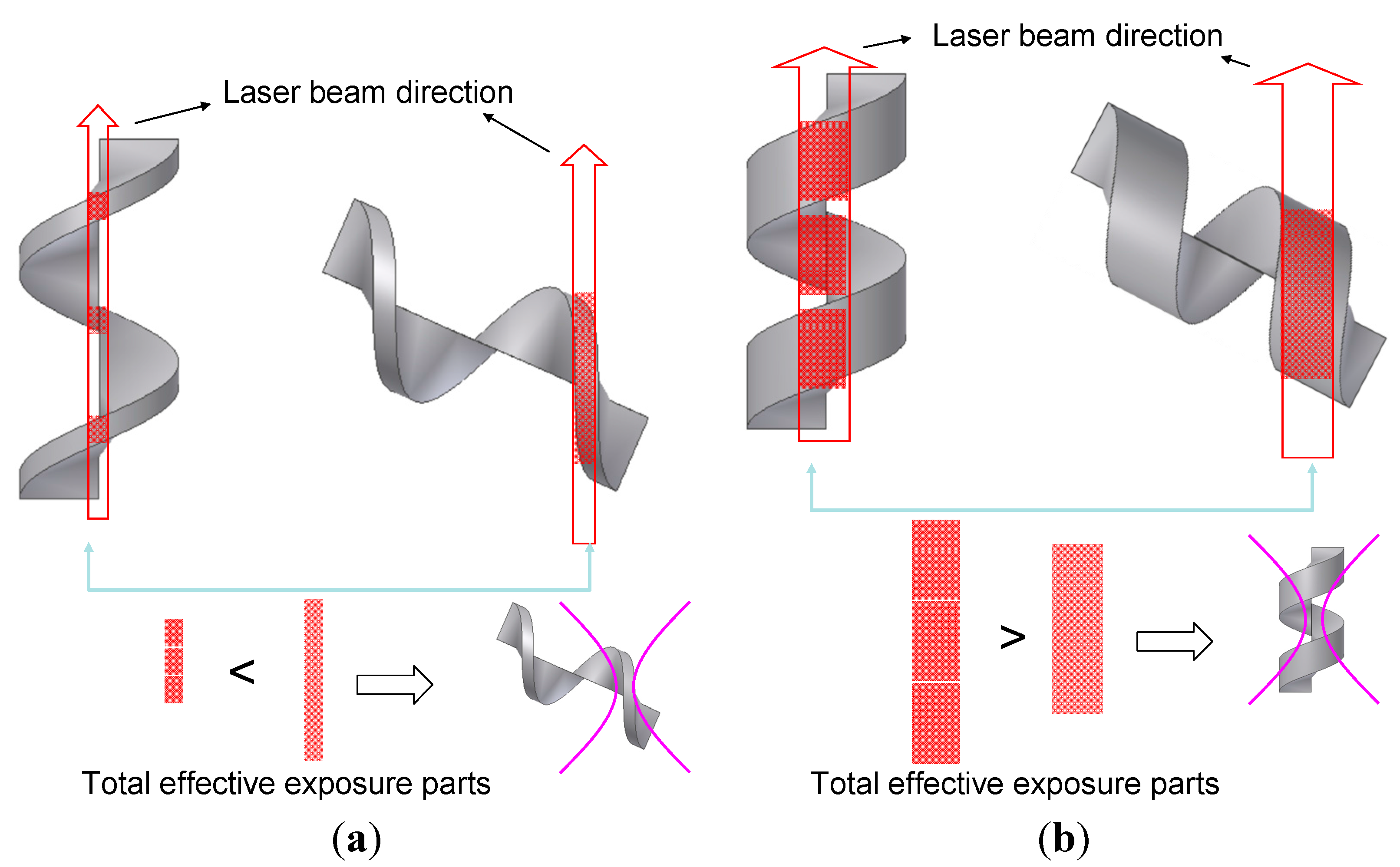
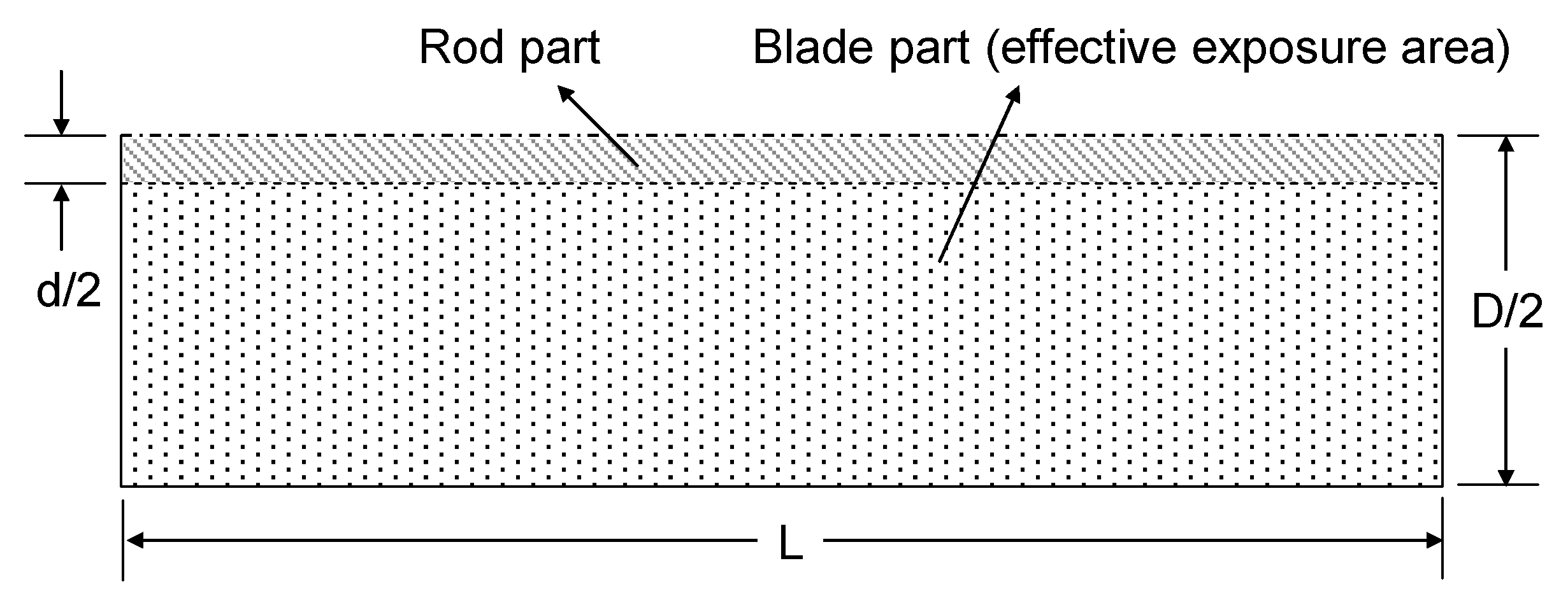
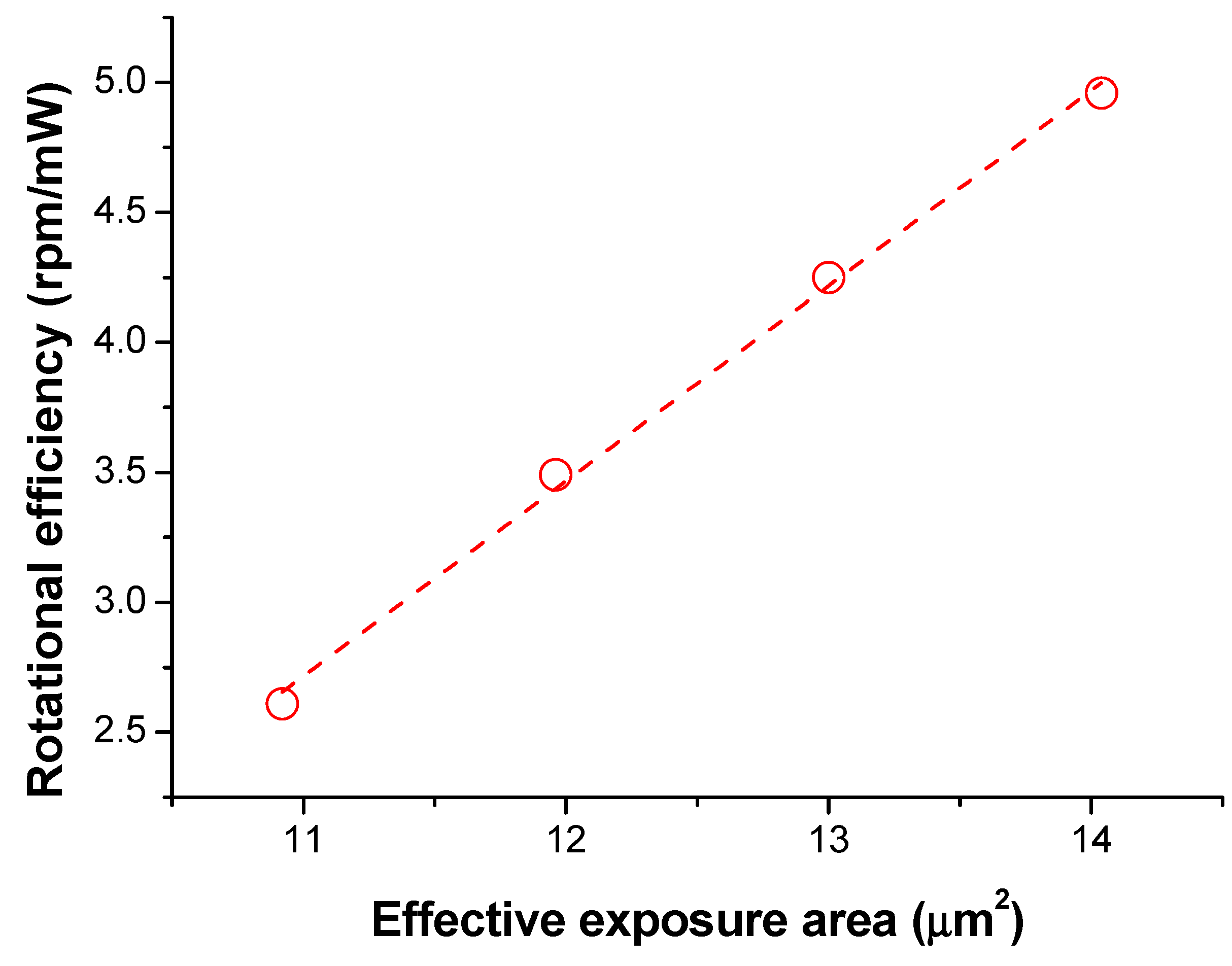
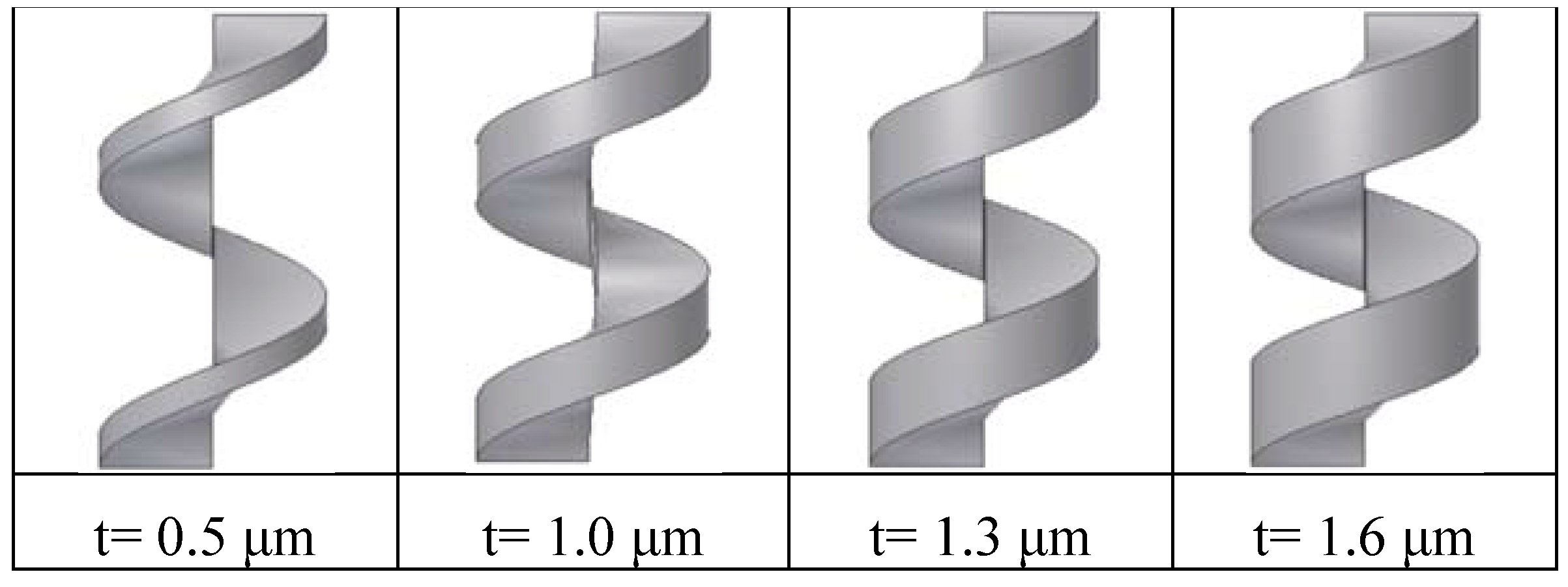
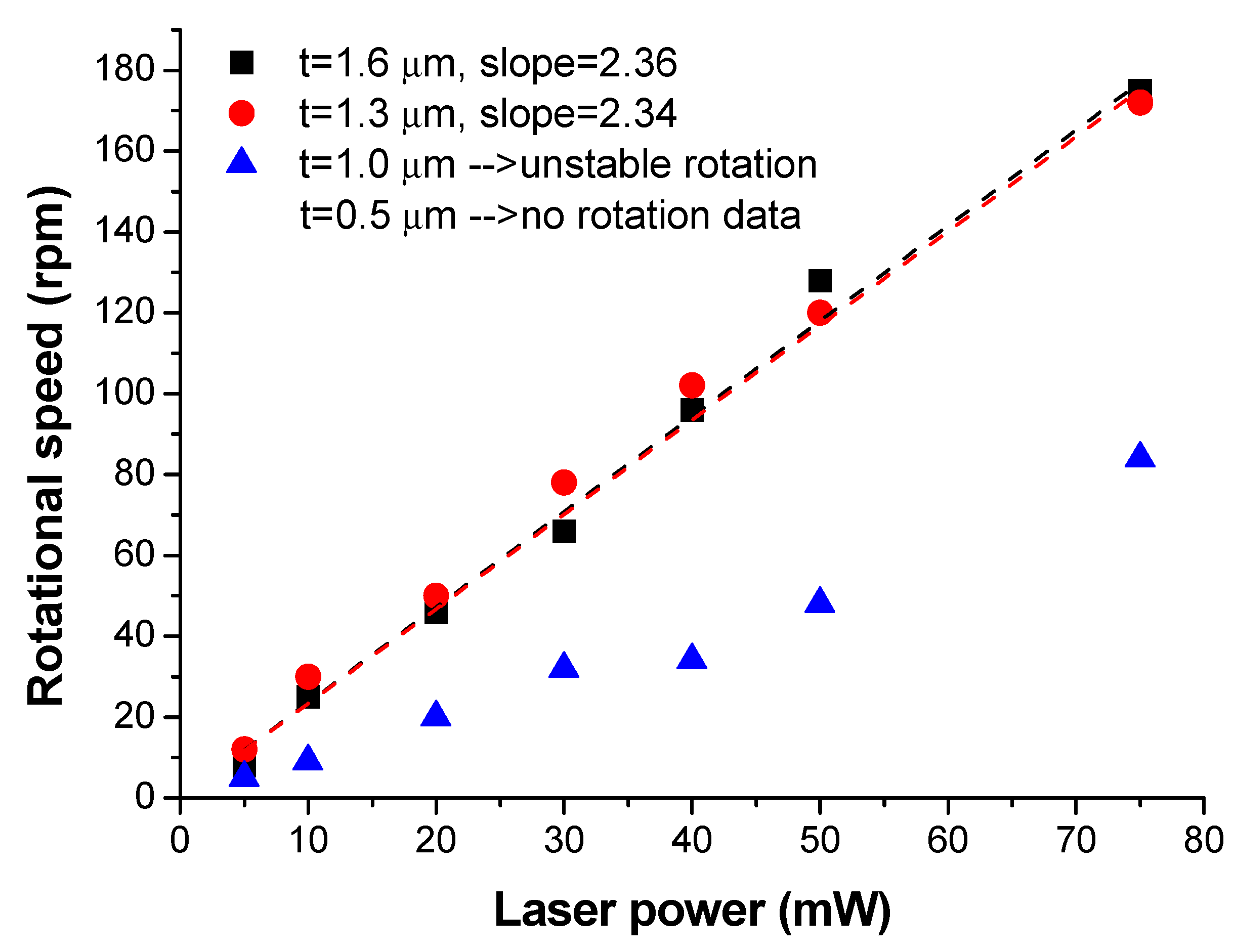
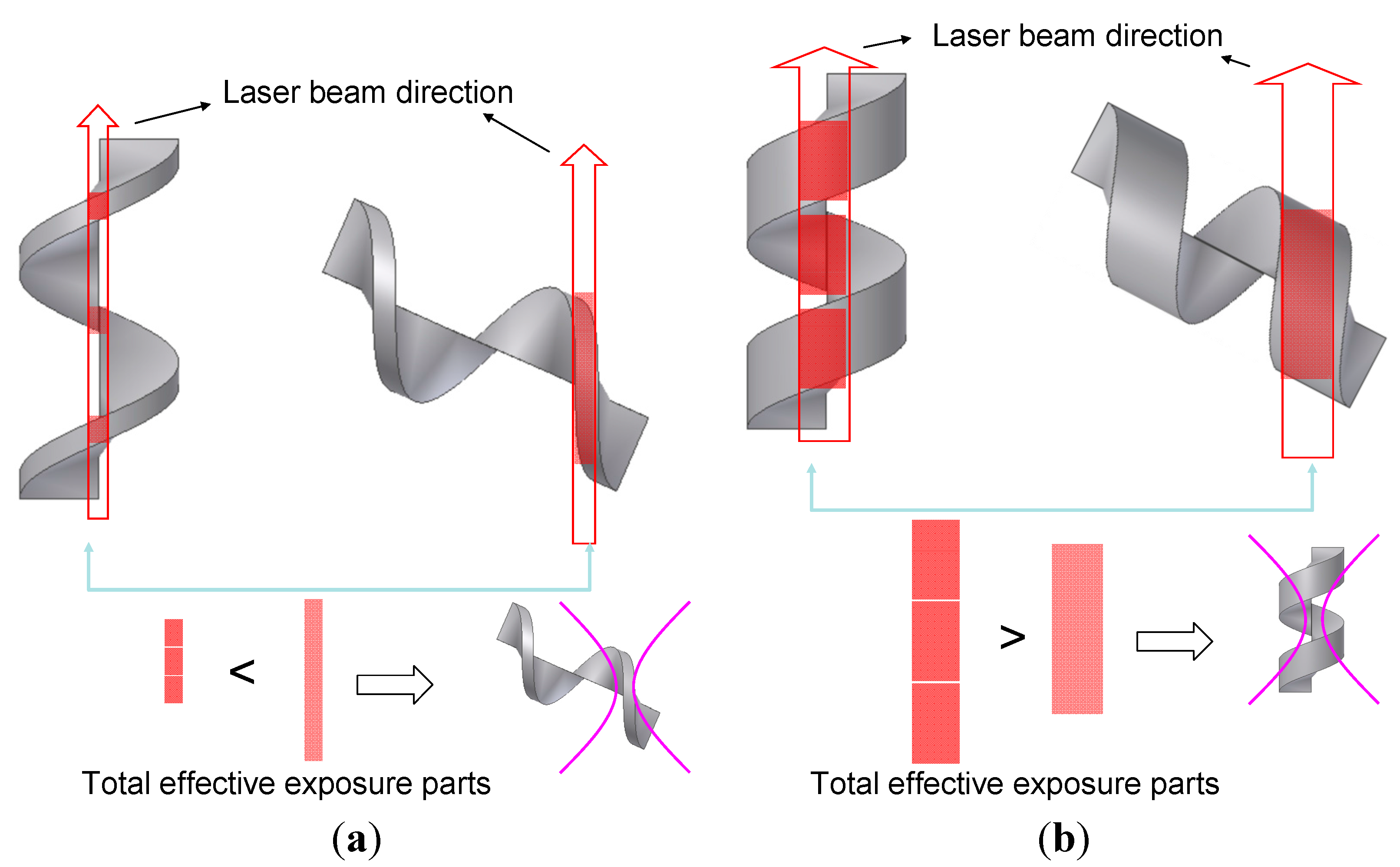
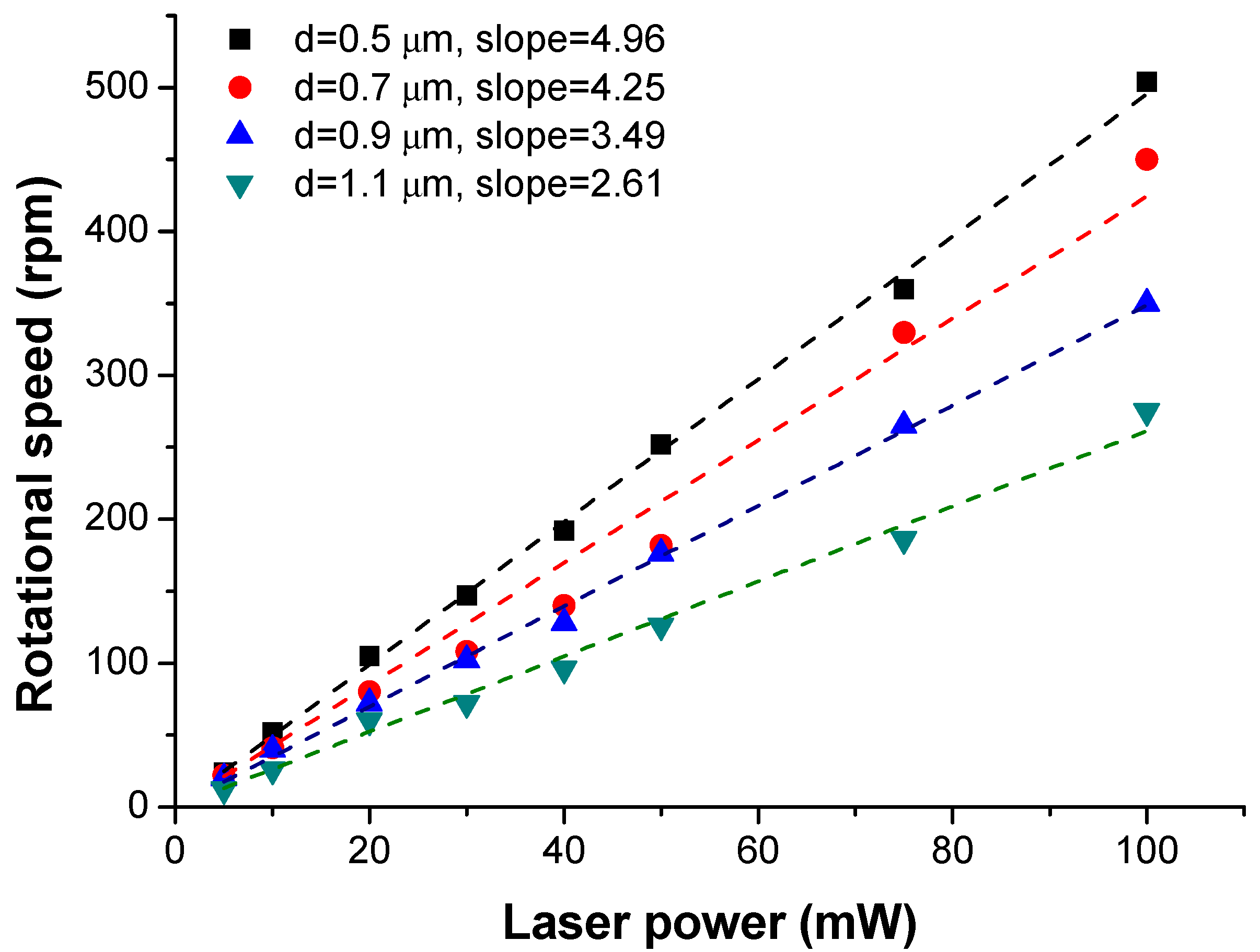
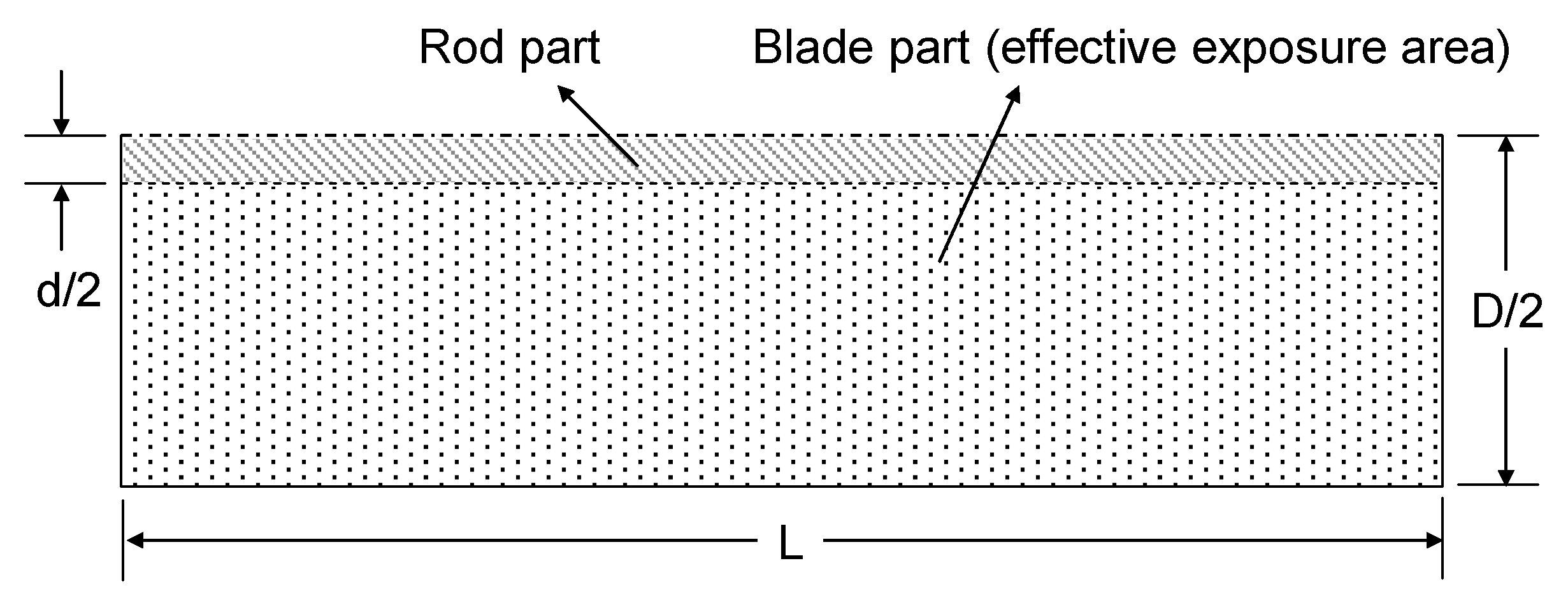
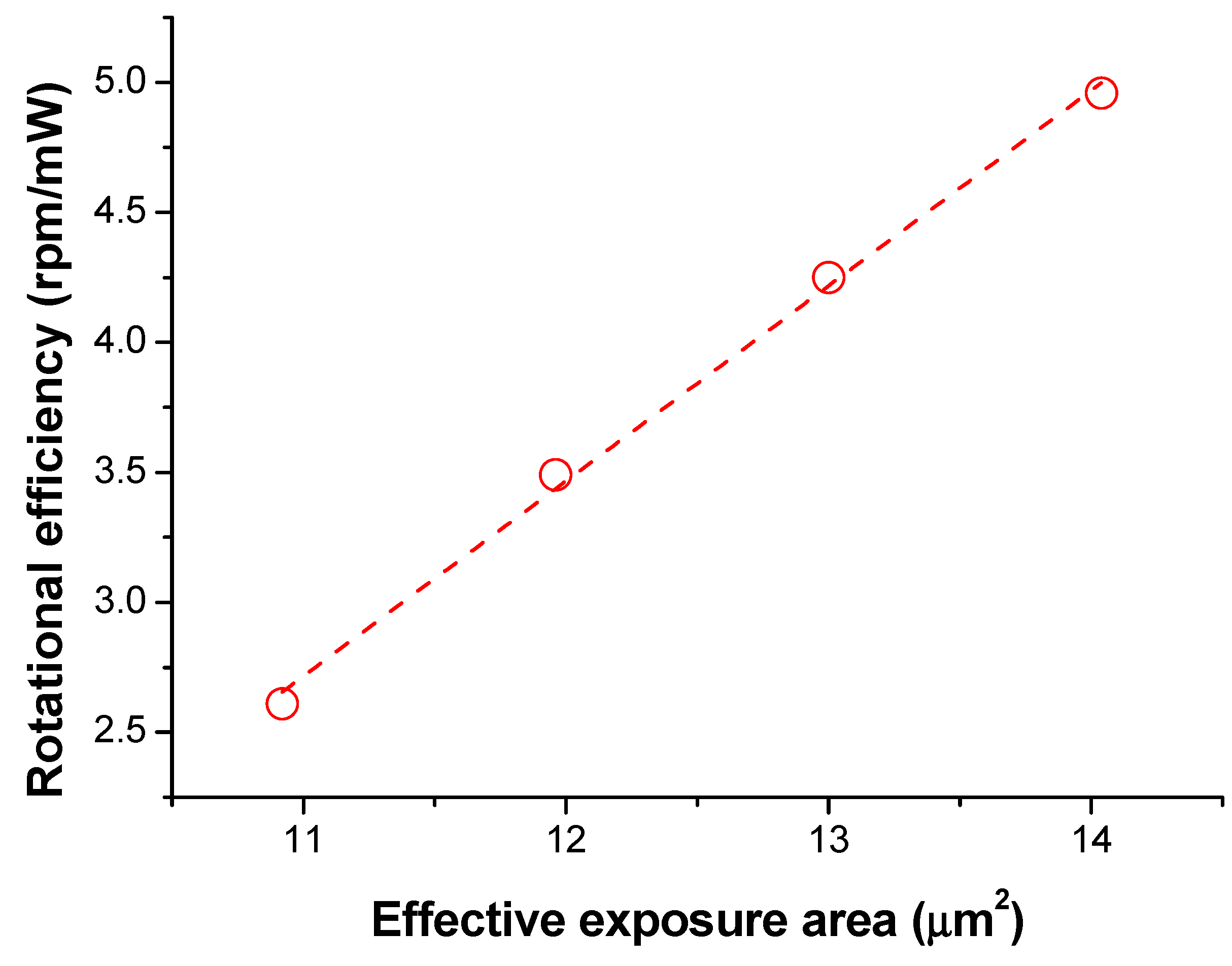
3.1. Effect of Blade Thickness


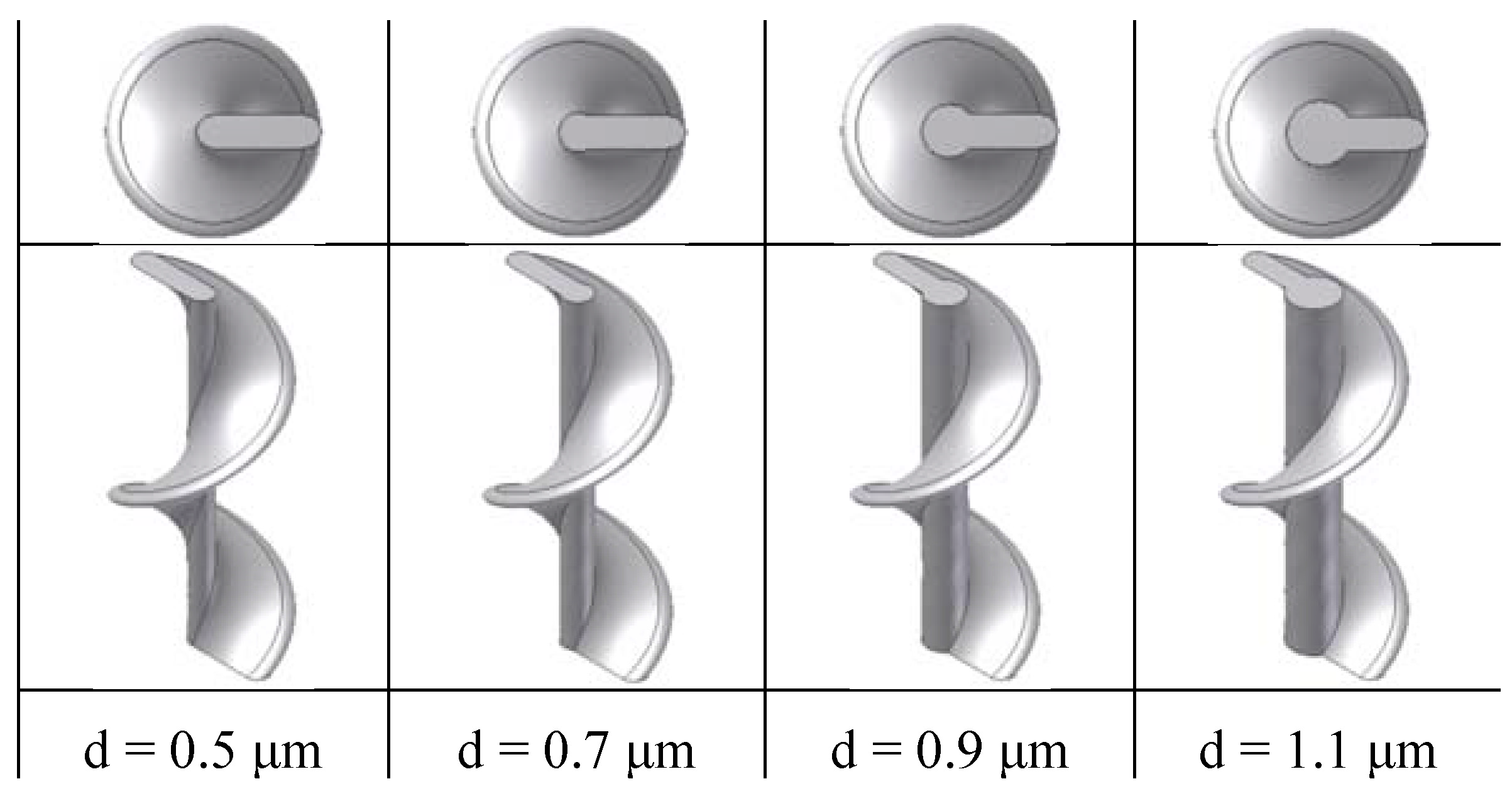
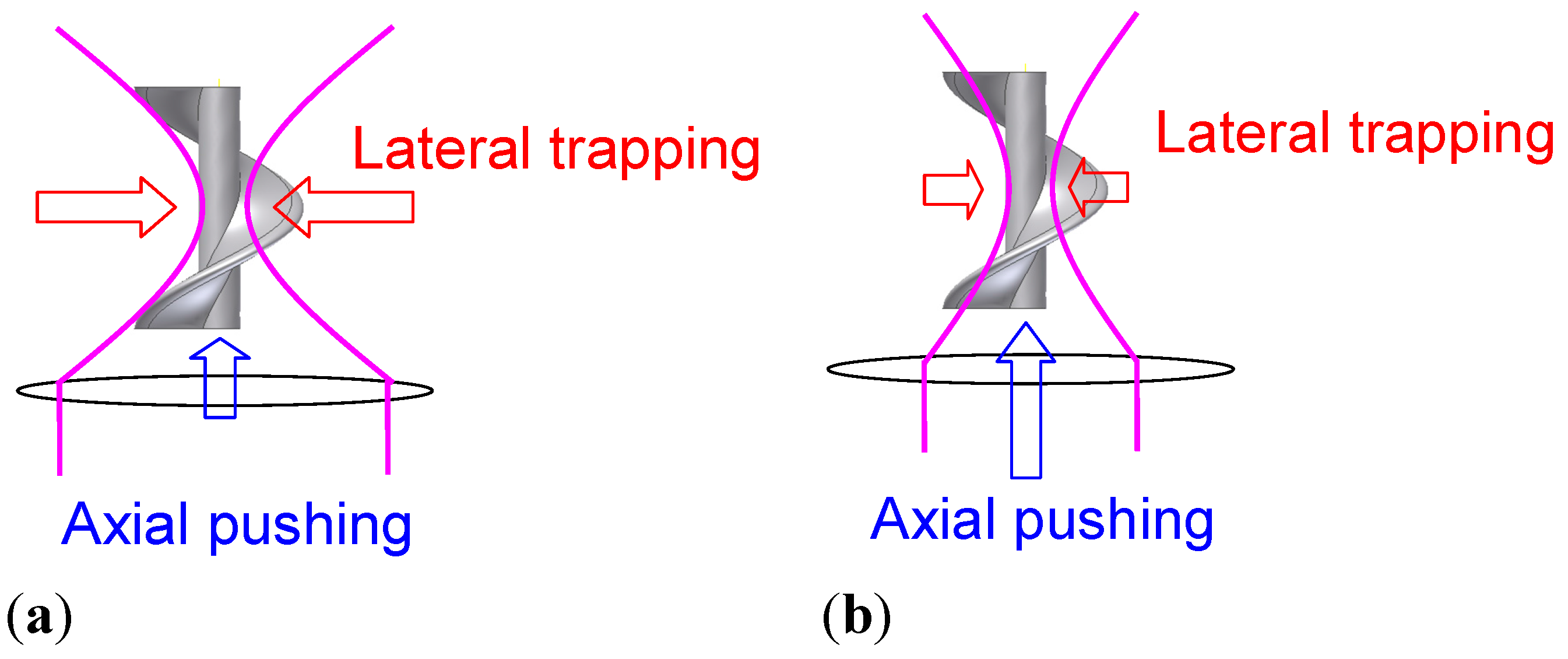
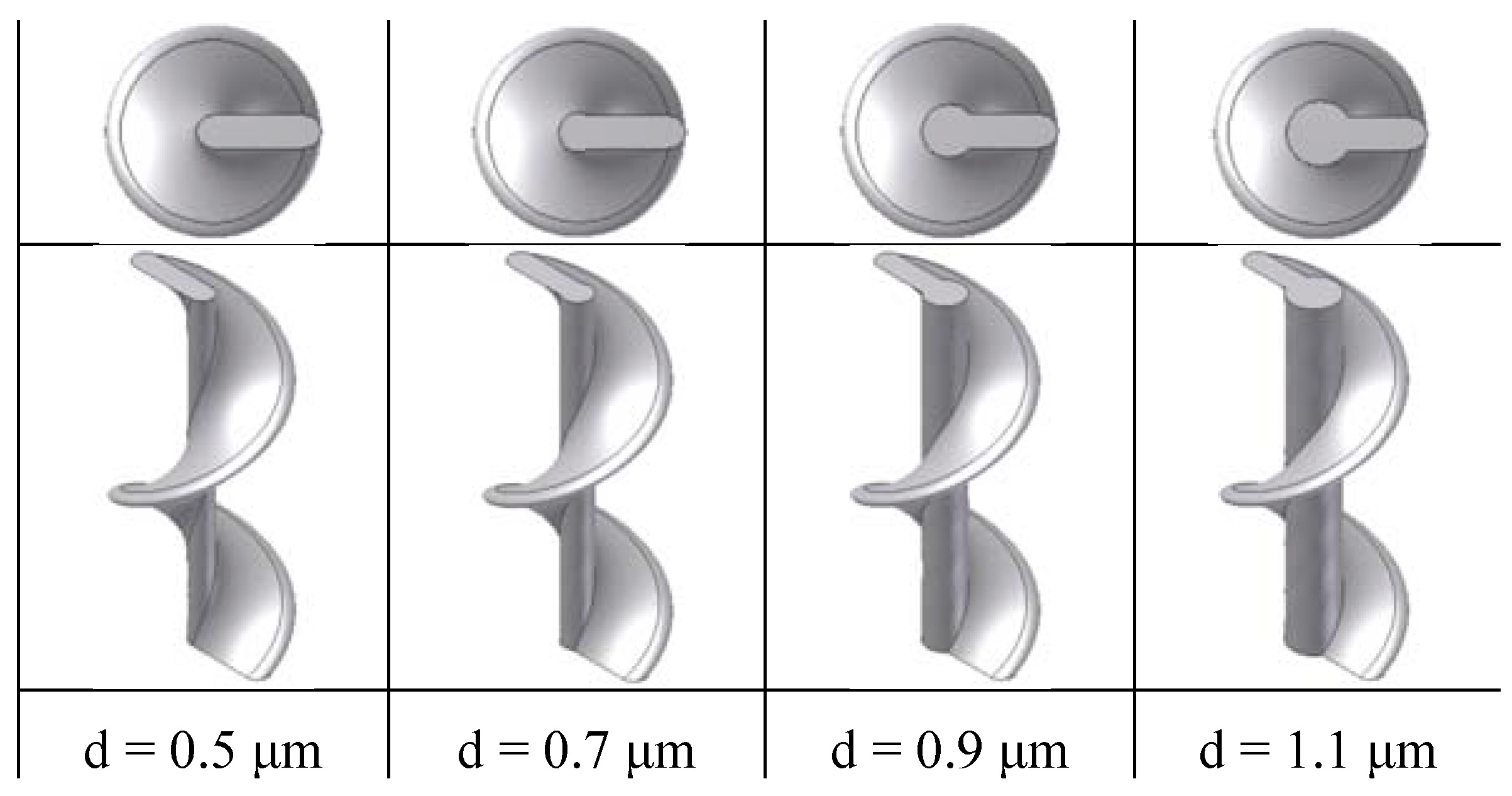
3.2. Effect of the Central Rod

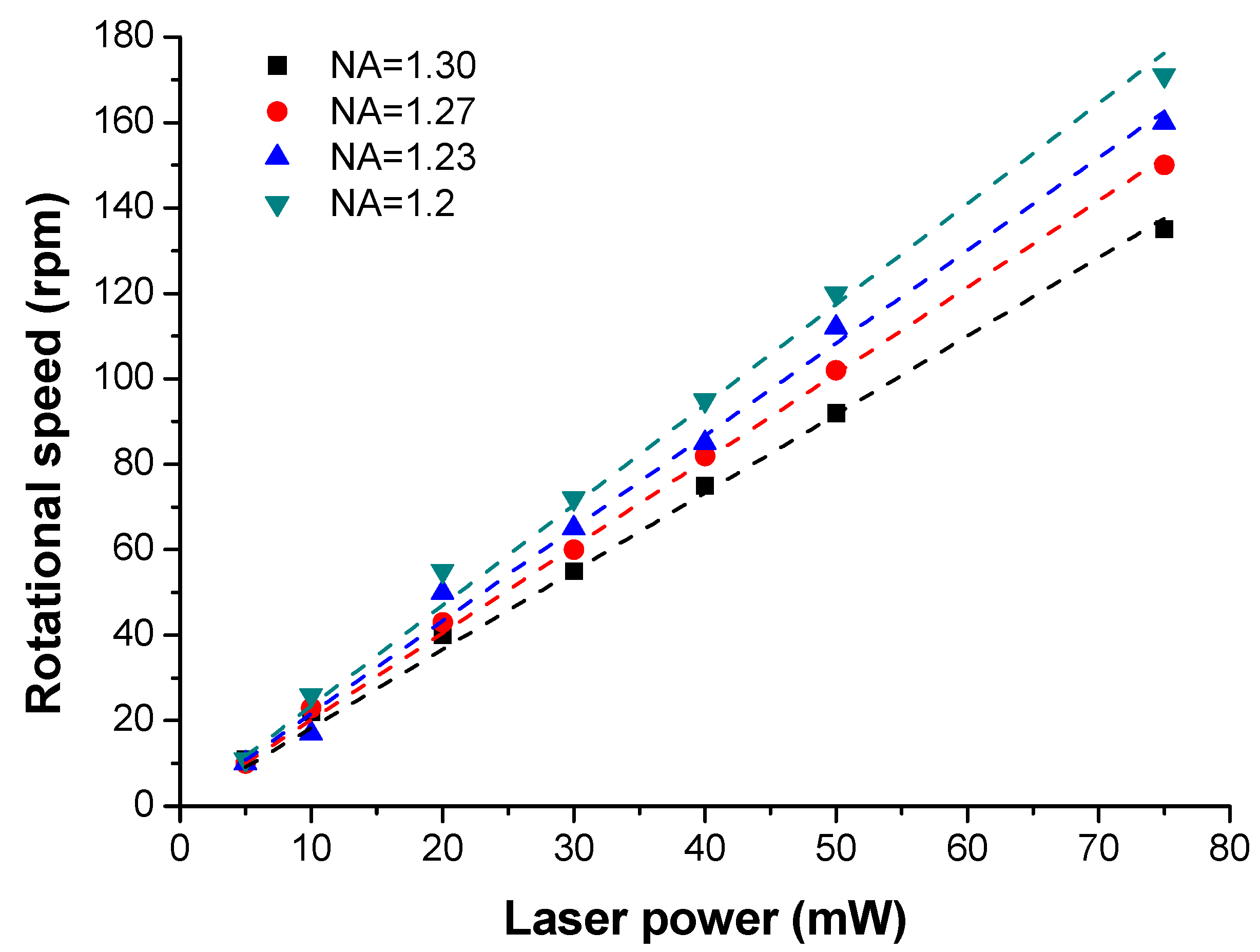
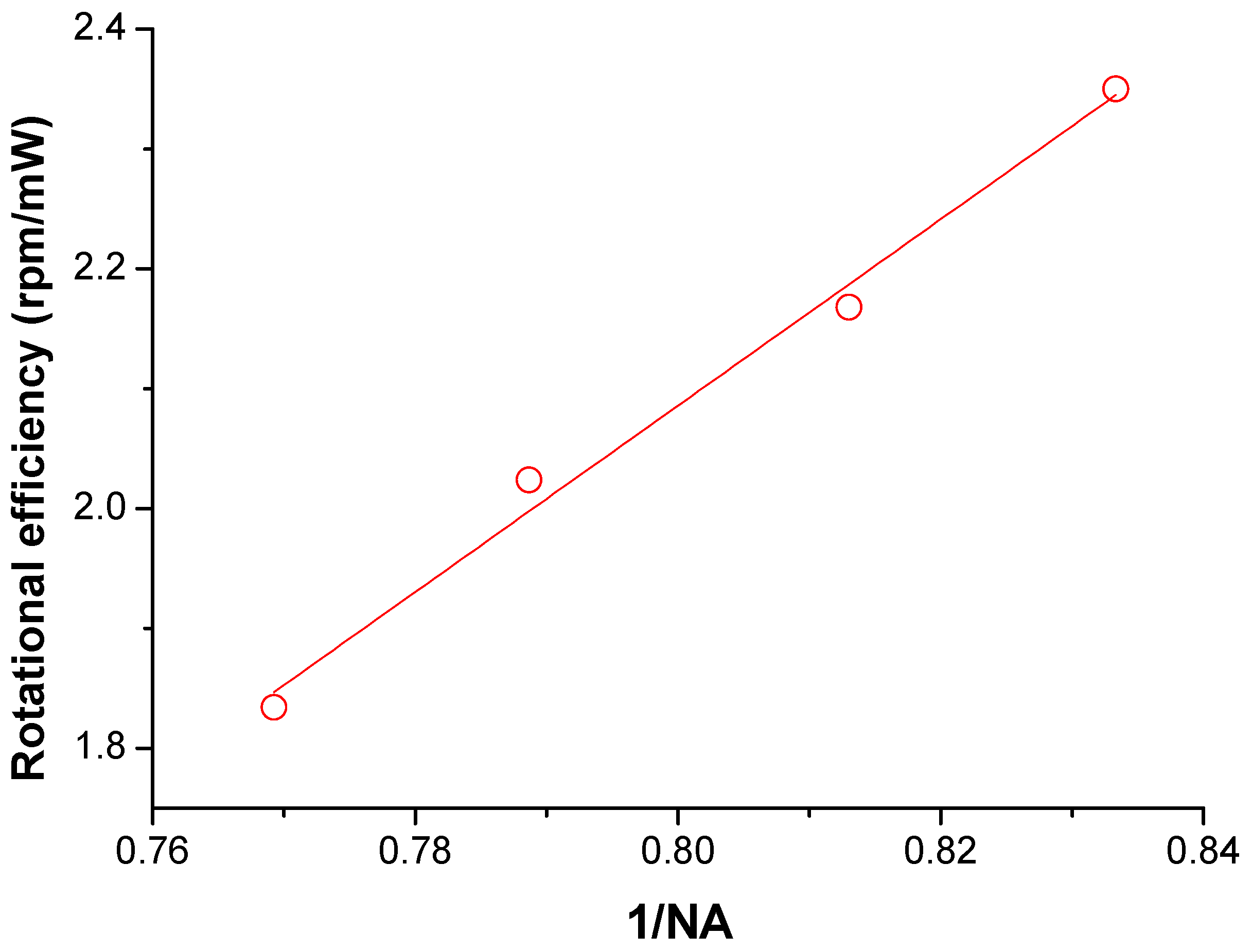
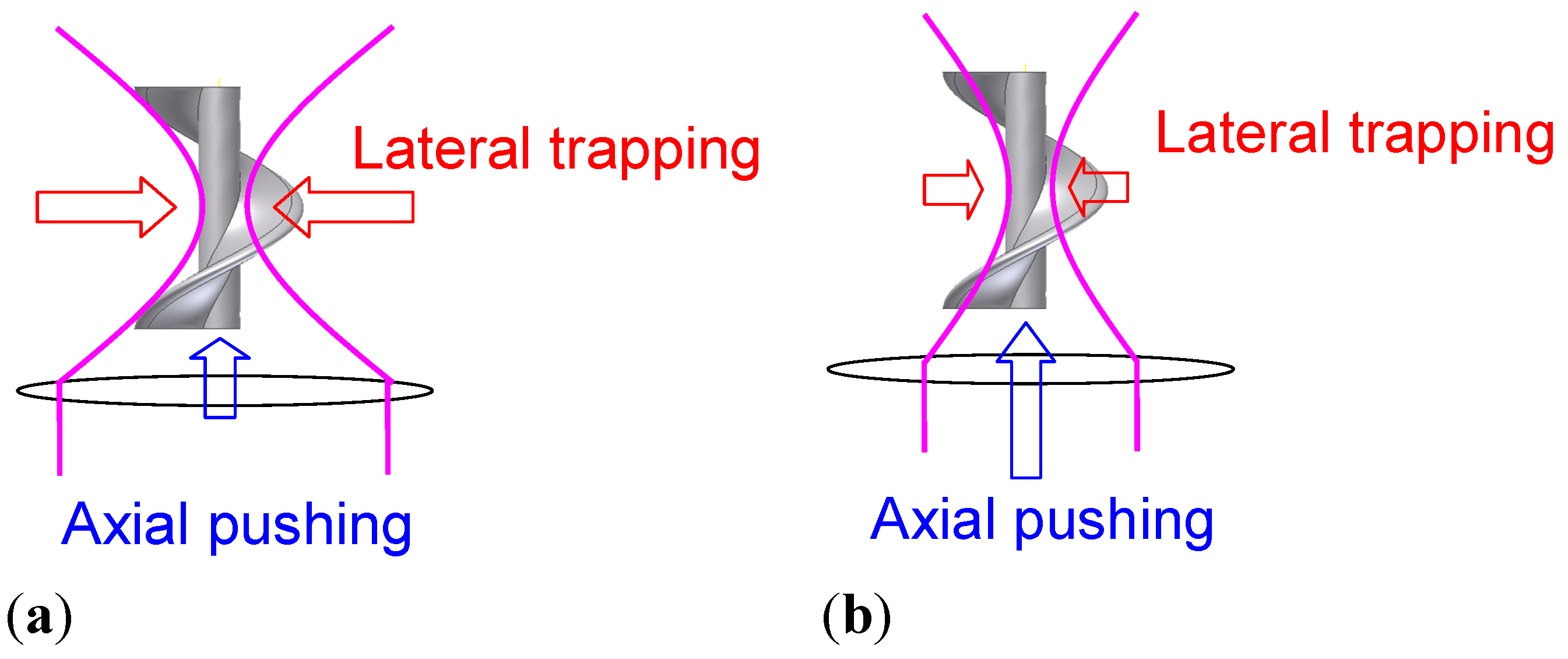
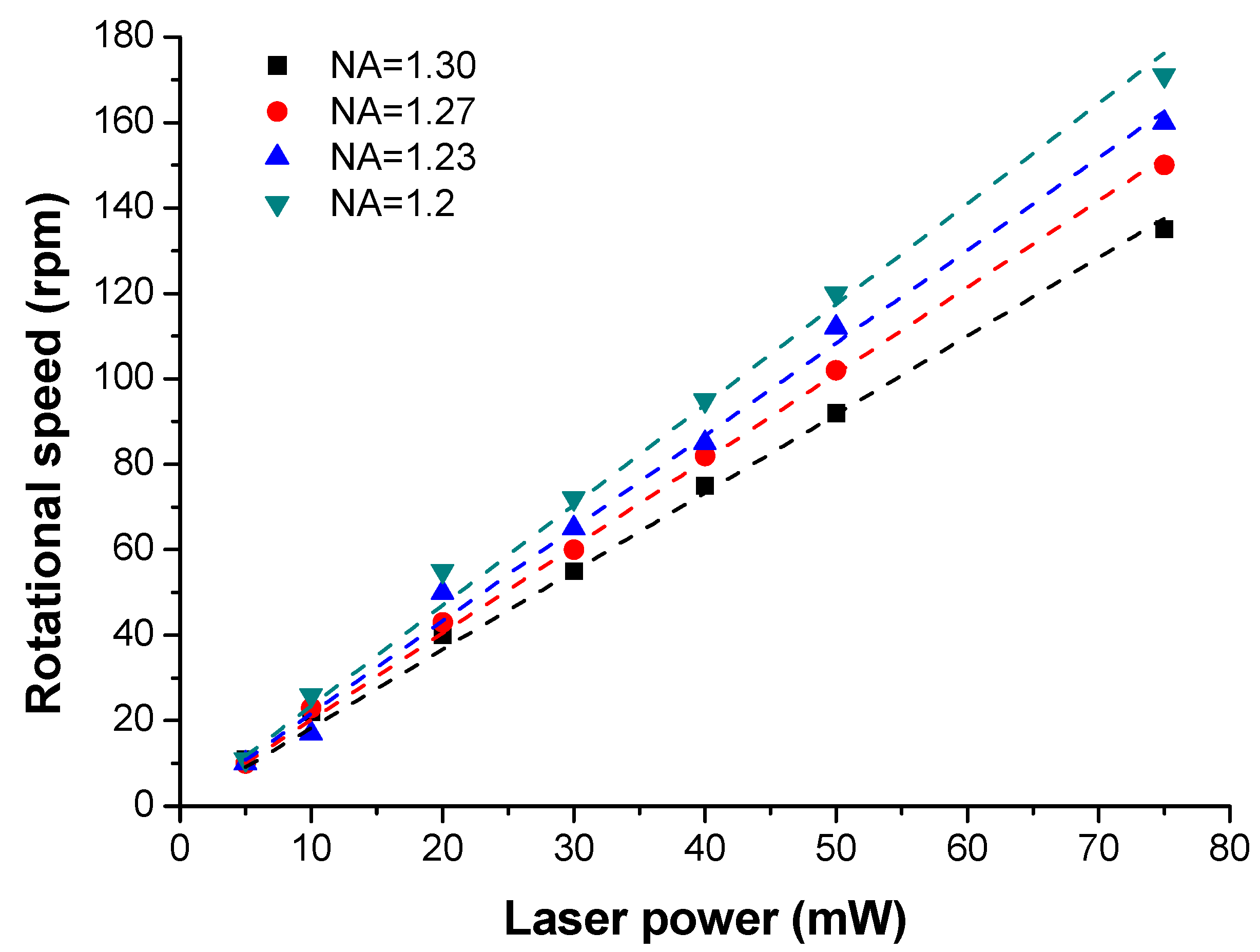
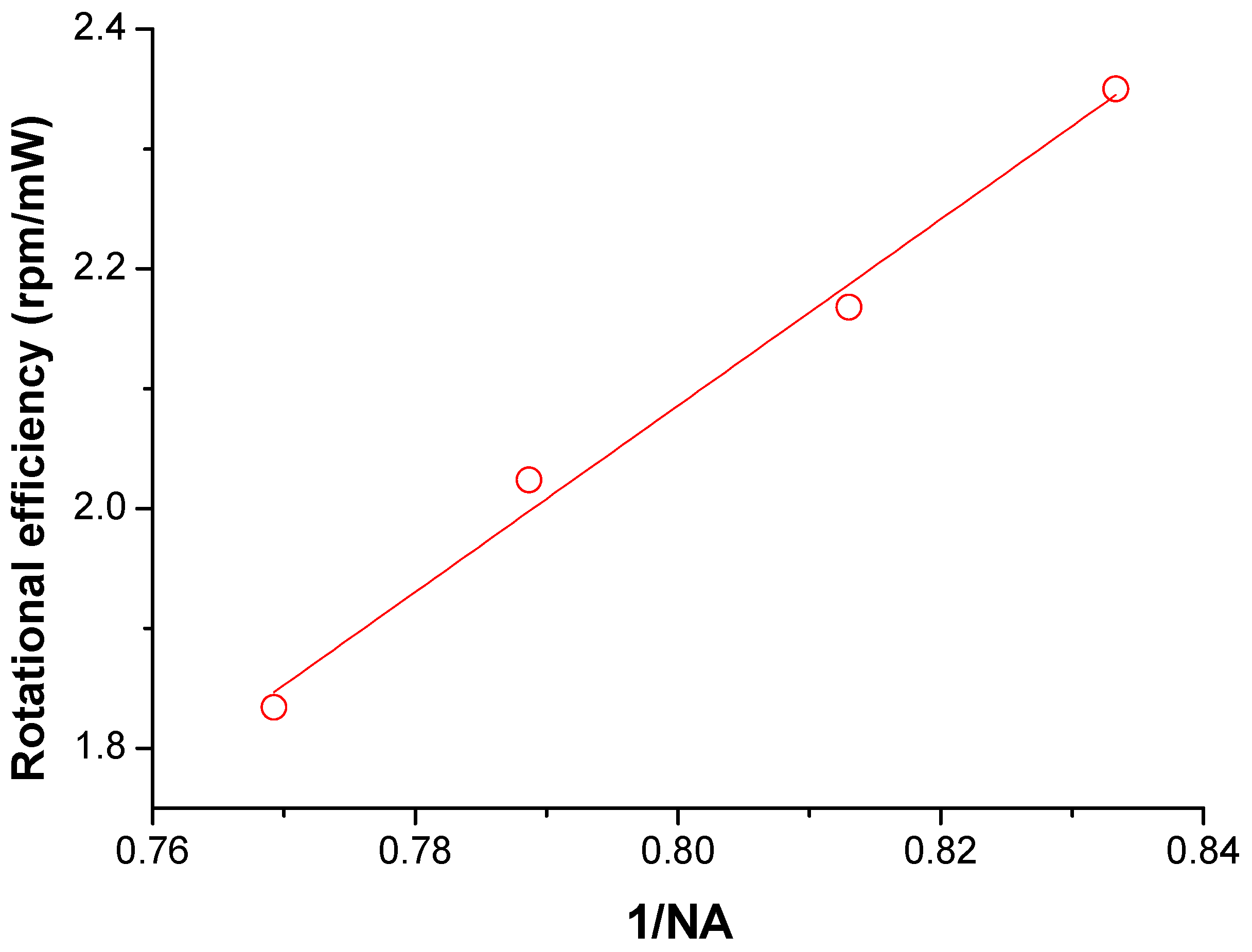
3.3. Effect of the Numerical Aperture
4. Conclusions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Screw Number | Blade Number | Blade Thickness | Central Rod | NA |
|---|---|---|---|---|---|
| Rotational speed | ↓ | ↑ | - | ↓ | ↓ |
| Stabilization | - | - | ↑ | ↑ | ↑ |
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Maruo, S.; Nakamura, O.; Kawata, S. Three-dimensional microfabrication with two-photon-absorbed photopolymerization. Opt. Lett. 1997, 22, 132–134. [Google Scholar] [CrossRef] [PubMed]
- Joshi, M.P.; Pudavar, H.E.; Swiatkiewicz, J.; Prasad, P.N.; Reinhardt, B.A. High-density three-dimensional optical data storage in a stacked compact disk format with two-photon writing and single photon readout. Appl. Phys. Lett. 1999, 74, 1338–1340. [Google Scholar]
- Sun, H.B.; Matsuo, S.; Misawa, H. Three-dimensional photonic crystal structures achieved with two-photon-absorption photopolymerization of resin. Appl. Phys. Lett. 1999, 74, 786–788. [Google Scholar] [CrossRef]
- Ashkin, A.; Dziedzic, J.; Bjorkholm, J.; Chu, S. Observation of a single-beam gradient force optical trap for dielectric particles. Opt. Lett. 1986, 11, 288–290. [Google Scholar] [CrossRef] [PubMed]
- Moffitt, J.R.; Chemla, Y.R.; Smith, S.B.; Bustamante, C. Recent advances in optical tweezers. Annu. Rev. Biochem. 2008, 77, 205–228. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Xia, H.; Xu, B.B.; Niu, L.G.; Wu, D.; Chen, Q.D.; Sun, H.B. Remote manipulation of micronanomachines containing magnetic nanoparticles. Opt. Lett. 2009, 34, 581–583. [Google Scholar] [CrossRef] [PubMed]
- Lin, L.; Fei, Z.; Lu, H.; Li, Z.Y. Optical forces on arbitrary shaped particles in optical tweezers. J. Appl. Phys. 2010, 108, 073110. [Google Scholar]
- Lin, C.L.; Lee, Y.H.; Lin, C.T.; Liu, Y.-J.; Hwang, J.L.; Chung, T.T.; Baldeck, P.L. Multiplying optical tweezers force using a micro-lever. Opt. Express 2011, 19, 20604–20609. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.L.; Li, Y.H.; Lin, C.T.; Chiang, C.C.; Liu, Y.J.; Chung, T.T.; Baldeck, P.L. Preliminary study of lever-based optically driven micro-actuator. In Proceedings of the 3rd International Conference on Smart Materials and Nanotechnology in Engineering, Shenzhen, China, 5–8 December 2011.
- Baldeck, P.L.; Lim, C.L.; Lin, Y.S.; Lin, C.T.; Chung, T.T.; Bouriau, M.; Vitrant, G. Optically driven Archimedes micro-screws for micropump applications: Multiple blade design. SPIE Proc. 2011, 8097. [Google Scholar] [CrossRef]
- Galadja, P.; Ormos, P. Complex micromachines produced and driven by light. Appl. Phys. Lett. 2001, 78, 249–251. [Google Scholar]
- Galadja, P.; Ormos, P. Rotors produced and driven in laser tweezers with reversed direction of rotation. Appl. Phys. Lett. 2002, 80, 4653–4655. [Google Scholar]
- Ikuta, K.; Sasaki, Y.; Maegawa, L.; Maruo, S. Biochemical IC chip for pretreatment in biochemical experiments. In Proceedings of the IEEE 6th Annual International Conference on Micro Electro Mechanical Systems, Kyoto, Japan, 19–23 January 2003; pp. 343–346.
- Maruo, S.; Inoue, H. Optically driven micropump produced by three-dimensional two-photon microfabrication. Appl. Phys. Lett. 2006, 89, 144101. [Google Scholar] [CrossRef]
- Maruo, S.; Inoue, H. Optically driven viscous micropump using a rotating microdisk. Appl. Phys. Lett. 2007, 91, 084101. [Google Scholar] [CrossRef]
- Maruo, S.; Takaura, A.; Saito, Y. Optically driven micropump with a twin spiral microrotor. Opt. Express 2009, 17, 18525–18532. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.J.; Lee, Y.H.; Lin, Y.S.; Tsou, C.; Baldeck, P.L.; Lin, C.L. Optically Driven Mobile Integrated Micro-tools for Lab-on-a-chips. Actuators 2013, 2, 19–26. [Google Scholar] [CrossRef]
- Lee, Y.H.; Liu, Y.J.; Tzou, C.F.; Bouriau, M.; Baldeck, P.L.; Lin, C.L. Optically driven gear-based mechanical micro-transducer for lab-on-a-chip. J. Neurosci. Neuroeng. 2013, 2, 58–60. [Google Scholar] [CrossRef]
- Lin, C.L.; Vitrant, G.; Bouriau, M.; Casalegno, R.; Baldeck, P.L. Optically driven Archimedes microscrews for micropump applications. Opt. Express 2011, 19, 8267–8276. [Google Scholar] [CrossRef] [PubMed]
- Nieminen, T.A.; Rubinsztein-Dunlop, H.; Heckenberg, N.R. Angular momentum generation by scattering: Alignment and rotation of microobjects. In Proceedings of the 6th Conference on Electromagnetic and Light Scattering by Nonspherical Particles: Theory, Measurements, and Applications, Gainesville, FL, USA, 4–8 March 2002; pp. 239–242.
- Lin, C.L.; Wang, I.; Pierre, M.; Colombier, I.; Andraud, C.; Baldeck, P.L. Rotational properties of micro-slabs driven by linearly polarized light. J. Nonlinear Opt. Phys. Mater. 2005, 14, 375–382. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-L.; Lin, Y.-S.; Baldeck, P.L. Rotational Efficiency of Photo-Driven Archimedes Screws for Micropumps. Micromachines 2015, 6, 674-683. https://doi.org/10.3390/mi6060674
Lin C-L, Lin Y-S, Baldeck PL. Rotational Efficiency of Photo-Driven Archimedes Screws for Micropumps. Micromachines. 2015; 6(6):674-683. https://doi.org/10.3390/mi6060674
Chicago/Turabian StyleLin, Chih-Lang, Yu-Sheng Lin, and Patrice L. Baldeck. 2015. "Rotational Efficiency of Photo-Driven Archimedes Screws for Micropumps" Micromachines 6, no. 6: 674-683. https://doi.org/10.3390/mi6060674
APA StyleLin, C.-L., Lin, Y.-S., & Baldeck, P. L. (2015). Rotational Efficiency of Photo-Driven Archimedes Screws for Micropumps. Micromachines, 6(6), 674-683. https://doi.org/10.3390/mi6060674