
Reconfigurable Orbital Electrowetting for Controllable Droplet Transport on Slippery Surfaces

 ,
,  ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
2.2.1. Design of the Experimental Setup
2.2.2. Preparation of Slippery Surfaces
2.2.3. Preparation of Electrodes
2.2.4. Electrical Measurements
2.2.5. Droplet Behavior Measurement
3. Results and Discussion
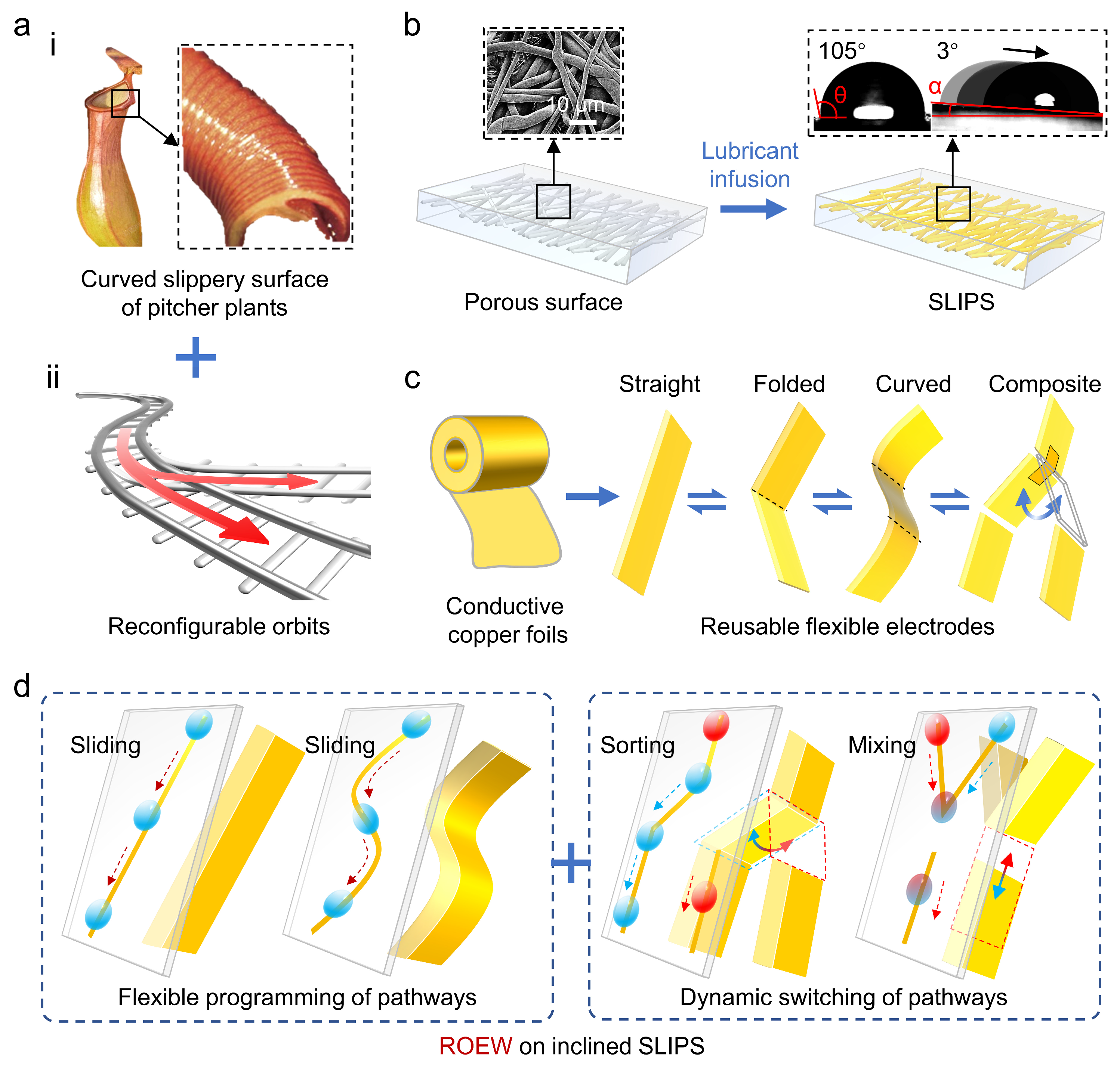
3.1. Conceptual Design of ROEW on Inclined SLIPS
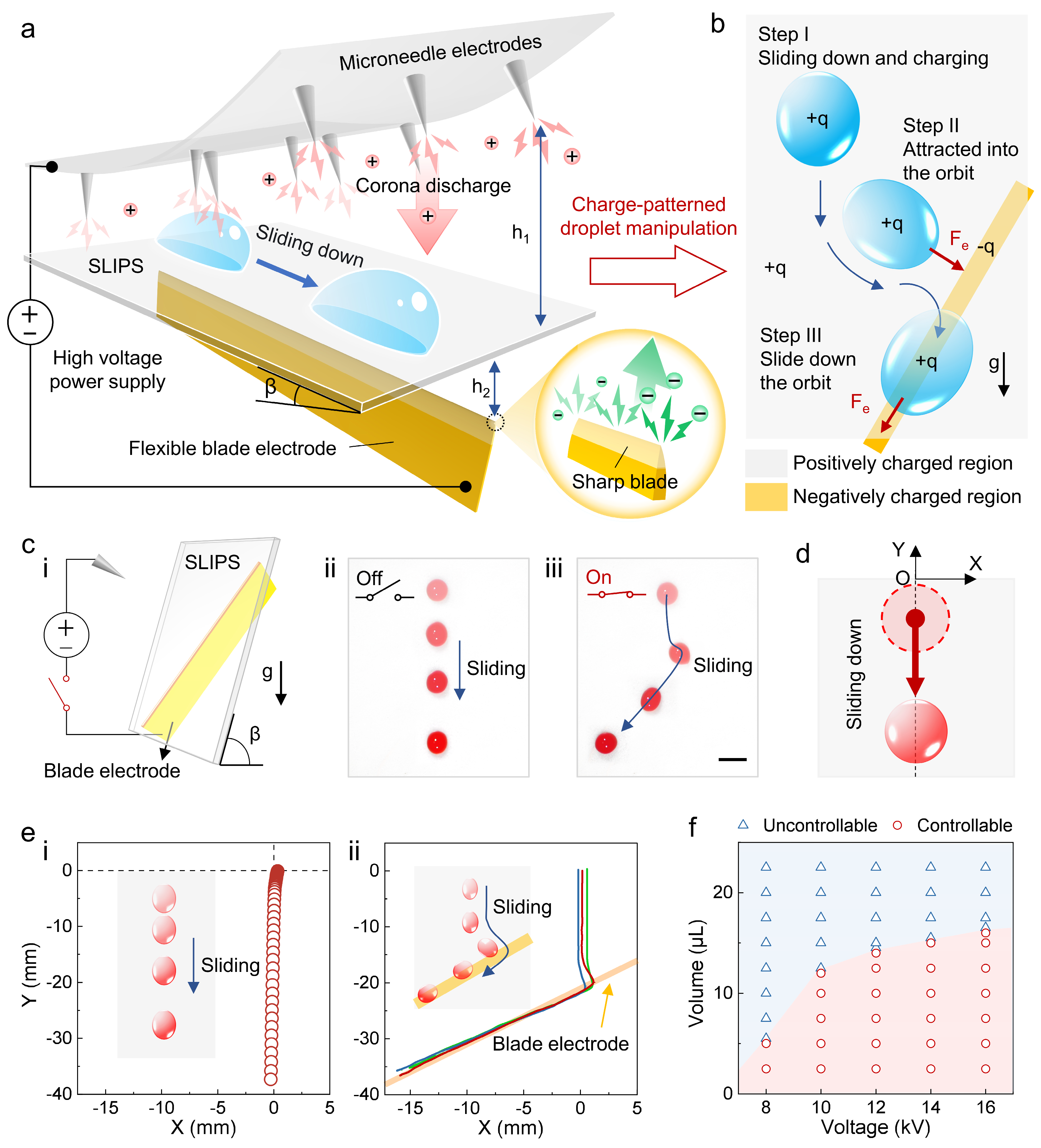
3.2. Construction of ROEW and Controllable Droplet Sliding
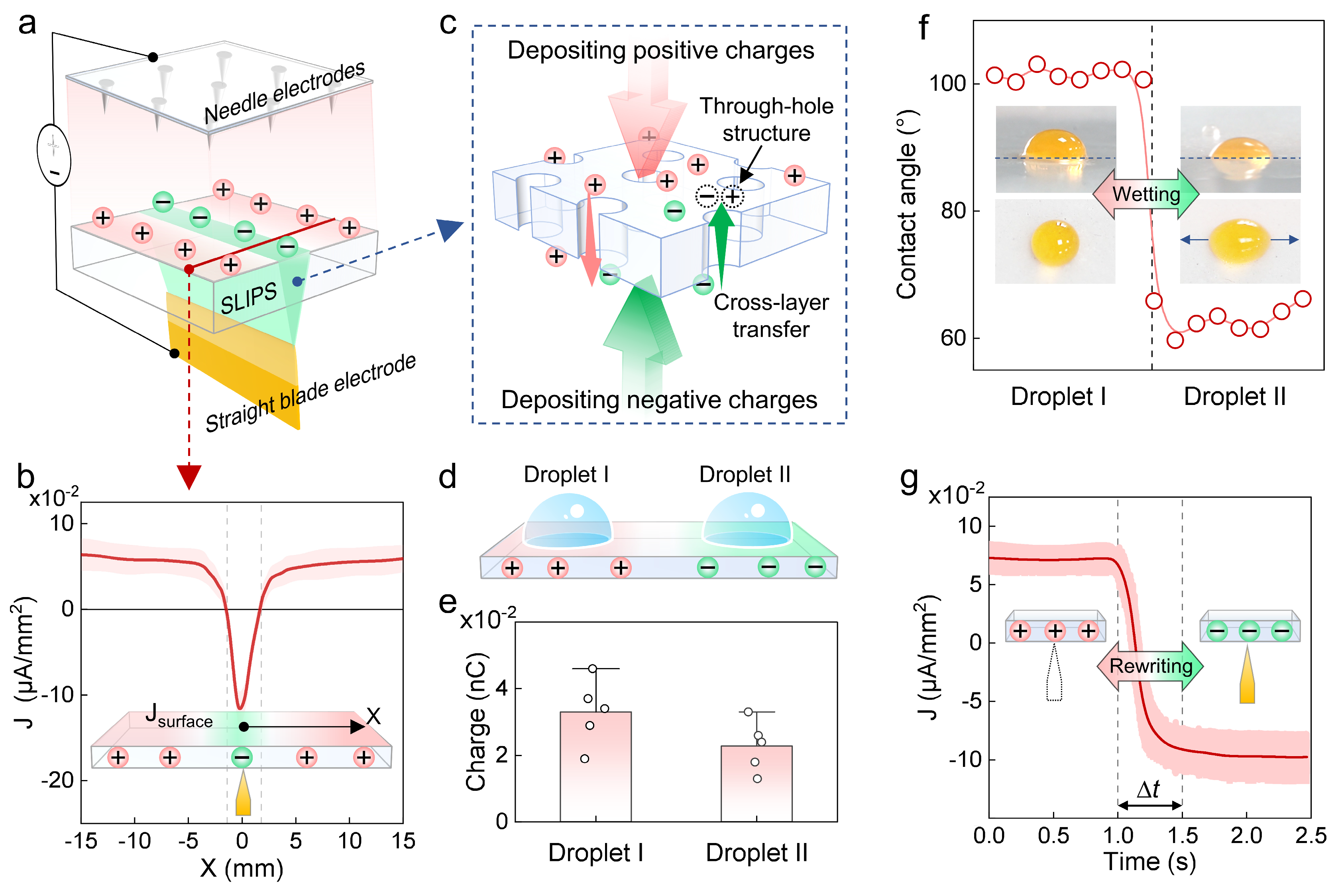
3.3. Mechanism Validation and Reconfigurability of ROEW
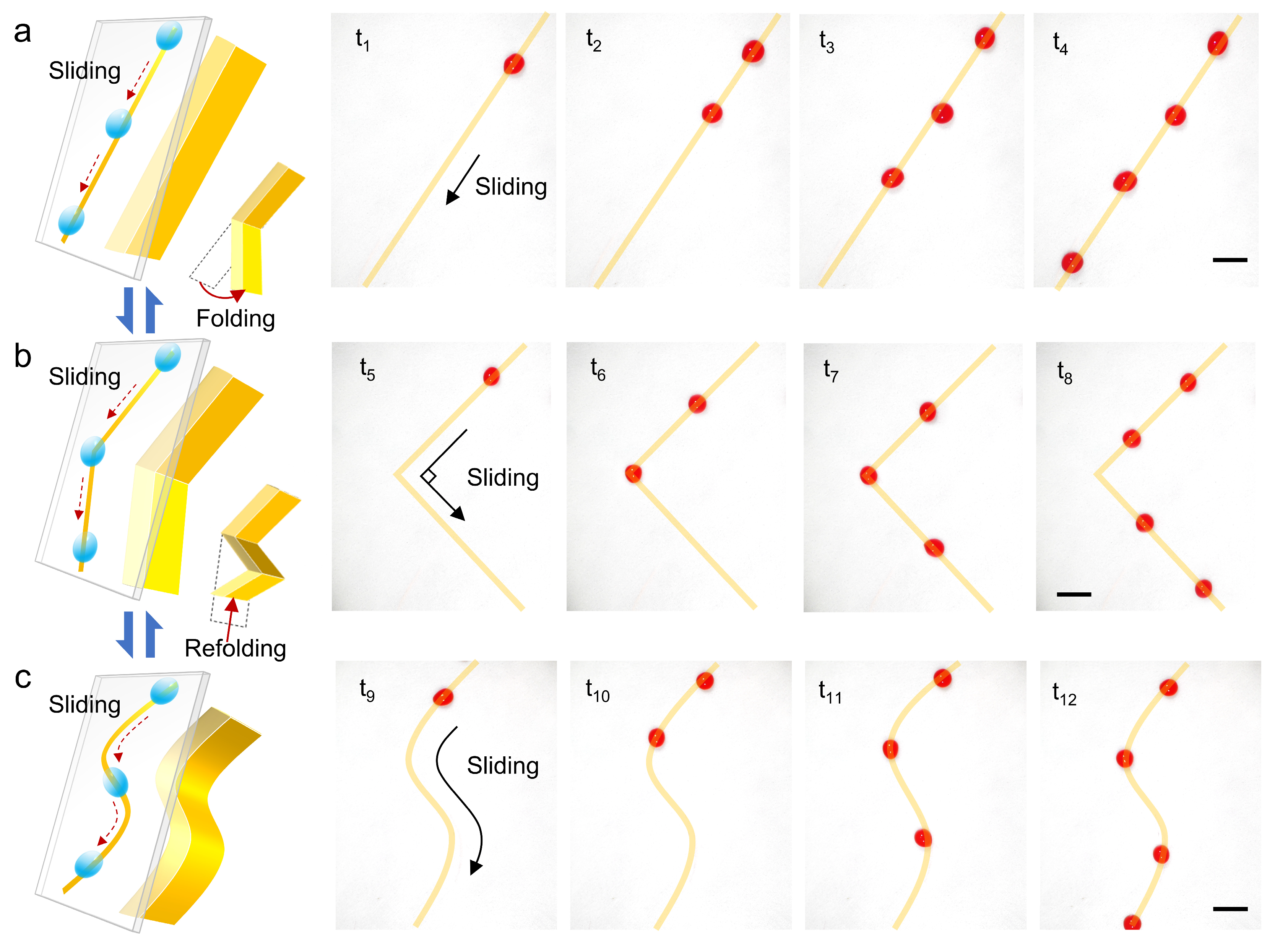
3.4. Flexibly Programmable Droplet Transport
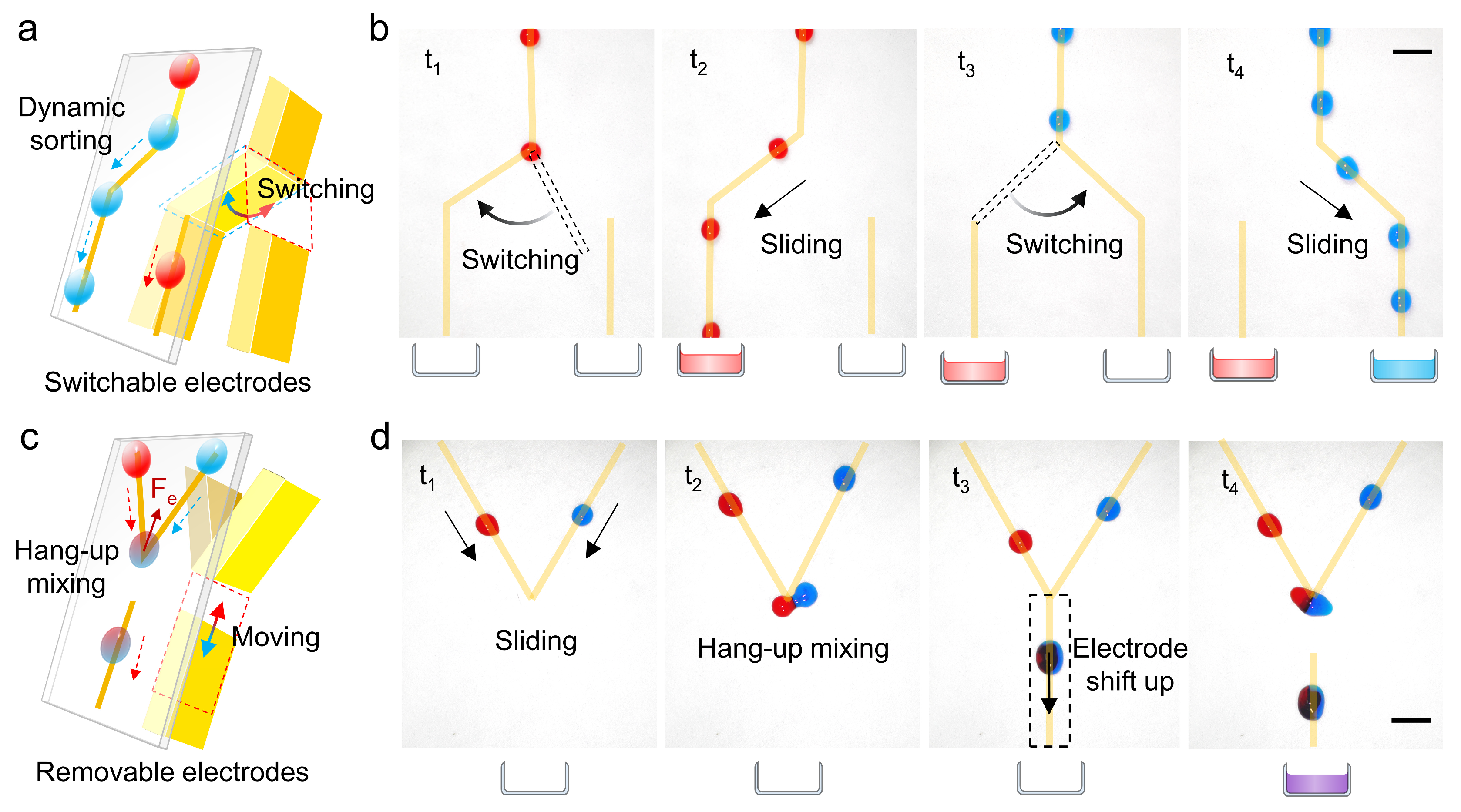
3.5. Dynamically Reconfigurable Droplet Handling
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Schutzius, T.; Jung, S.; Maitra, T.; Graeber, G.; Köhme, M.; Poulikakos, D. Spontaneous Droplet Trampolining on Rigid Superhydrophobic Surfaces. Nature 2015, 527, 82–85. [Google Scholar] [CrossRef] [PubMed]
- Stone, H.; Stroock, A.; Ajdari, A. Engineering Flows in Small Devices: Microfluidics Toward a Lab-on-a-Chip. Annu. Rev. Fluid Mech. 2004, 36, 381–411. [Google Scholar] [CrossRef]
- Li, J.; Hou, Y.; Liu, Y.; Hao, C.; Li, M.; Chaudhury, M.; Yao, S.; Wang, Z. Directional Transport of High-Temperature Janus Droplets Mediated by Structural Topography. Nat. Phys. 2016, 12, 606. [Google Scholar] [CrossRef]
- Prakash, M.; Quéré, D.; Bush, J. Surface Tension Transport of Prey by Feeding Shorebirds: The Capillary Ratchet. Science 2008, 320, 931–934. [Google Scholar] [CrossRef]
- Abdelgawad, M.; Wheeler, A. The Digital Revolution: A New Paradigm for Microfluidics. Adv. Mater. 2009, 21, 920–925. [Google Scholar] [CrossRef]
- Wong, T.; Kang, S.; Tang, S.; Smythe, E.; Hatton, B.; Grinthal, A.; Aizenberg, J. Bioinspired Self-Repairing Slippery Surfaces with Pressure-Stable Omniphobicity. Nature 2011, 477, 443–447. [Google Scholar] [CrossRef]
- Hou, L.; Liu, X.; Ge, X.; Hu, R.; Cui, Z.; Wang, N.; Zhao, Y. Designing of Anisotropic Gradient Surfaces for Directional Liquid Transport: Fundamentals, Construction, and Applications. Innovation 2023, 4, 100508. [Google Scholar] [CrossRef]
- Battat, S.; Weitz, D.; Whitesides, G. An Outlook on Microfluidics: The Promise and The Challenge. Lab Chip 2020, 22, 530. [Google Scholar] [CrossRef]
- Coley, C.; Thomas, D.; Lummiss, J.; Jaworski, J.; Breen, C.; Schultz, V. A Robotic Platform for Flow Synthesis of Organic Compounds Informed by AI Planning. Science 2019, 365, eaax1566. [Google Scholar] [CrossRef]
- Armingol, E.; Officer, A.; Harismendy, O.; Lewis, N. Deciphering Cell-Cell Interactions and Communication from Gene Expression. Nat. Rev. Genet. 2020, 22, 71. [Google Scholar] [CrossRef]
- Jiang, J.; Gao, J.; Zhang, H.; He, W.; Zhang, J.; Daniel, D.; Yao, X. Directional Pumping of Water and Oil Microdroplets on Slippery Surface. Proc. Natl. Acad. Sci. USA 2019, 116, 2482. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Wang, R.X.; Wang, J.; Wong, T.S. Compact Nanoscale Textures Reduce Contact Time of Bouncing Droplets. Sci. Adv. 2020, 6, eabb2307. [Google Scholar] [CrossRef] [PubMed]
- Kwon, G.; Panchanathan, D.; Mahmoudi, S.; Gondal, M.; McKinley, G.; Varanasi, K. Visible Light Guided Manipulation of Liquid Wettability on Photoresponsive Surfaces. Nat. Commun. 2017, 8, 14968. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Gao, W.; Zhang, H.; Zou, M.; Chen, Y.; Zhao, Y. Programmable Wettability on Photocontrolled Graphene Film. Sci. Adv. 2018, 4, eaat7392. [Google Scholar] [CrossRef]
- Zaltron, A.; Ferraro, D.; Meggiolaro, A.; Cremaschini, S.; Carneri, M.; Chiarello, E.; Sartori, P.; Pierno, M.; Sada, C.; Mistura, G. Optofluidic Platform for the Manipulation of Water Droplets on Engineered LiNbO₃ Surfaces. Adv. Mater. Interfaces 2022, 9, 2200345. [Google Scholar] [CrossRef]
- Puerto, A.; Méndez, A.; Arizmendi, L.; García-Cabañes, A.; Carrascosa, M. Optoelectronic Manipulation, Trapping, Splitting, and Merging of Water Droplets and Aqueous Biodroplets Based on the Bulk Photovoltaic Effect. Phys. Rev. Appl. 2020, 14, 024046. [Google Scholar] [CrossRef]
- Lin, H.; Yu, W.; Sabet, K.; Bogumil, M.; Zhao, Y.; Hambalek, J. Ferrobotic Swarms Enable Accessible and Adaptable Automated Viral Testing. Nature 2022, 611, 570–577. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, X.; Wang, Z.; Pan, S.; Yi, B.; Ai, L.; Gao, J.; Mugele, F.; Yao, X. Wetting Ridge Assisted Programmed Magnetic Actuation of Droplets on Ferrofluid-Infused Surface. Nat. Commun. 2021, 12, 7136. [Google Scholar] [CrossRef]
- Zhang, P.; Bachman, H.; Ozcelik, A.; Huang, T. Acoustic Microfluidics. Annu. Rev. Anal. Chem. 2020, 13, 17. [Google Scholar] [CrossRef]
- Yuan, Z.; Lu, C.; Liu, C.; Bai, X.; Zhao, L.; Feng, S.; Liu, Y. Ultrasonic Tweezer for Multifunctional Droplet Manipulation. Sci. Adv. 2023, 9, eadg2352. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, J.; Xiang, L.; Wang, J.; Wu, T.; Jiao, Y.; Jiang, S.; Li, C.; Fan, S.; Zhang, J. A Biocompatible Vibration-Actuated Omni-Droplets Rectifier with Large Volume Range Fabricated by Femtosecond Laser. Adv. Mater. 2022, 34, 2108567. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Ha, N.; Liu, T.; Dam, R.; Kim, C. Ionic-Surfactant-Mediated Electro-Dewetting for Digital Microfluidics. Nature 2019, 572, 507. [Google Scholar] [CrossRef] [PubMed]
- Jin, Y.; Xu, W.; Zhang, H.; Li, R.; Sun, J.; Yang, S.; Liu, M.; Mao, H.; Wang, Z. Electrostatic Tweezer for Droplet Manipulation. Proc. Natl. Acad. Sci. USA 2022, 119, e2105459119. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Zhang, C.; Fan, X.; Au Yeung, C.; Li, H.; Lin, H.; Shum, H. A Droplet Robotic System Enabled by Electret-Induced Polarization on Droplet. Nat. Commun. 2024, 15, 6220. [Google Scholar] [CrossRef]
- Sun, Q.; Wang, D.; Li, Y.; Zhang, J.; Ye, S.; Cui, J. Surface Charge Printing for Programmed Droplet Transport. Nat. Mater. 2019, 18, 936–941. [Google Scholar] [CrossRef]
- Zhou, Y.; Wu, J.; Gao, G.; Zeng, Y.; Liu, S.; Zheng, H. Universal Droplet Propulsion by Dynamic Surface-Charge Wetting. Microsyst. Nanoeng. 2024, 10, 134. [Google Scholar] [CrossRef]
- Gao, G.; Lin, C.; Zhou, Y.; Wu, J.; Guan, W.; Zheng, H. Programmable Surface-Charge-Modulated Wettability for Controllable Droplet Manipulation. Appl. Phys. Lett. 2025, 126, 041602. [Google Scholar] [CrossRef]
- Li, J.; Kim, C. Current Commercialization Status of Electrowetting-on-Dielectric (EWOD) Digital Microfluidics. Lab Chip 2020, 20, 1705–1712. [Google Scholar] [CrossRef]
- Tan, F.; Fan, Z.; Zhou, M.; Liu, T.; Sun, S.; Chen, G. Orbital Electrowetting-on-Dielectric for Droplet Manipulation on Superhydrophobic Surfaces. Adv. Mater. 2024, 36, 14346. [Google Scholar] [CrossRef]
- Xu, W.; Jin, Y.; Li, W.; Song, Y.; Gao, S.; Zhang, B.; Wang, L.; Cui, M.; Yan, X.; Wang, Z. Triboelectric Wetting for Continuous Droplet Transport. Sci. Adv. 2022, 8, eade2085. [Google Scholar] [CrossRef]
- Narahari, T.; Dahmer, J.; Sklavounos, A.; Kim, T.; Satkauskas, M.; Clotea, I. Portable Sample Processing for Molecular Assays: Application to Zika Virus Diagnostics. Lab Chip 2022, 22, 1748–1763. [Google Scholar] [CrossRef] [PubMed]
- Yang, C.; Gan, X.; Zeng, Y.; Xu, Z.; Xu, L.; Hu, C.; Ma, H.; Chai, B.; Hu, S.; Chai, Y. Advanced Design and Applications of Digital Microfluidics in Biomedical Fields: An Update of Recent Progress. Biosens. Bioelectron. 2023, 242, 115723. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Li, H.; Yan, X.; Zhou, M.; Sun, S.; Jiang, D. Orbital Electrowetting for Versatile Droplet Maneuvering on Slippery Surfaces. Droplet 2025, 1, 1. [Google Scholar] [CrossRef]
- Wu, J.; Fang, D.; Zhou, Y.; Gao, G.; Zeng, J.; Zeng, Y.; Zheng, H. Multifunctional Droplet Handling on Surface-Charge-Graphic-Decorated Porous Papers. Lab Chip 2024, 24, 594–603. [Google Scholar] [CrossRef]
- Chen, H.; Zhang, P.; Zhang, L.; Liu, H.; Jiang, Y.; Zhang, D.; Han, Z.; Jiang, L. Continuous directional water transport on the peristome surface of Nepenthes alata. Nature 2016, 532, 85–89. [Google Scholar] [CrossRef]
- Liu, M.; Wang, S.; Jiang, L. Nature-Inspired Superwettability Systems. Nat. Rev. Mater. 2017, 2, 17036. [Google Scholar] [CrossRef]
- Zhao, Y.; Wu, Y.; Wang, L.; Zhang, M.; Chen, X.; Liu, M.; Fan, J.; Liu, J.; Zhou, F.; Wang, Z. Bio-Inspired Reversible Underwater Adhesive. Nat. Commun. 2017, 8, 2218. [Google Scholar] [CrossRef]
- Park, K.; Kim, P.; Grinthal, A.; He, N.; Fox, D.; Weaver, J.; Aizenberg, J. Condensation on Slippery Asymmetric Bumps. Nature 2016, 531, 78–82. [Google Scholar] [CrossRef]
- Shang, L.; Fu, F.; Cheng, Y.; Yu, Y.; Wang, J.; Gu, Z.; Zhao, Y. Bioinspired Multifunctional Spindle-Knotted Microfibers from Microfluidics. Small 2017, 13, 1600286. [Google Scholar] [CrossRef]
- Amini, S.; Kolle, S.; Petrone, L.; Ahanotu, O.; Sunny, S.; Sutanto, C.; Hoon, S.; Cohen, L.; Weaver, J.; Aizenberg, J.; et al. Preventing Mussel Adhesion Using Lubricant-Infused Materials. Science 2017, 357, 668–673. [Google Scholar] [CrossRef]
- Sartori, P.; Ferraro, D.; Dassie, M.; Meggiolaro, A.; Filippi, D.; Zaltron, A.; Pierno, M.; Mistura, G. Oscillatory Motion of Viscoelastic Drops on Slippery Lubricated Surfaces. Commun. Phys. 2022, 5, 81. [Google Scholar] [CrossRef]
- Jones, J. A Theoretical Explanation of the Laws of Warburg and Sigmond. Proc. R. Soc. A 1997, 453, 1033–1052. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.; Li, G.; Lin, Z.; Wang, R.; Chen, D.; Lei, Y.; Tan, D.; Wang, Z.; Zhao, Y.; et al. Topological Elastic Liquid Diode. Sci. Adv. 2025, 11, eadt9526. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Zhou, X.; Li, J.; Che, L.; Yao, J.; McHale, G.; Chaudhury, M.; Wang, Z. Topological Liquid Diode. Sci. Adv. 2017, 3, eaao3530. [Google Scholar] [CrossRef]
- Fan, Y.; Wang, X.; Li, Y.; Li, Z.; Wang, Z.; Zhang, Y.; Liu, Y.; Liu, Y.; Wang, Z.; Wang, H. Field-Programmable Topographic-Morphing Array for General-Purpose Lab-on-a-Chip Systems. Adv. Mater. 2024, 36, 240604. [Google Scholar] [CrossRef]
- Kaminski, T.; Garstecki, P. Controlled Droplet Microfluidic Systems for Multistep Chemical and Biological Assays. Chem. Soc. Rev. 2017, 46, 6210–6226. [Google Scholar] [CrossRef]
- Zeng, Y.; Li, S.; Chong, Z.; Niu, Y.; Liu, K.; Zhou, J.; He, Z.; Zhang, J.; Zhao, J.; Ding, S.; et al. Reconfigurable Liquid Devices from Liquid Building Blocks. Nat. Chem. Eng. 2024, 1, 149–158. [Google Scholar] [CrossRef]
- Katsikis, G.; Cybulski, J.; Prakash, M. Synchronous Universal Droplet Logic and Control. Nat. Phys. 2015, 11, 588. [Google Scholar] [CrossRef]
- Aubert, S.; Bezagu, M.; Spivey, A.; Arseniyadis, S. Spatial and Temporal Control of Chemical Processes. Chem. Soc. Rev. 2017, 46, 6210. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Li, H.; Zhou, Y.; Gao, G.; Zhou, T.; Wang, Z.; Zheng, H. Reconfigurable Orbital Electrowetting for Controllable Droplet Transport on Slippery Surfaces. Micromachines 2025, 16, 618. https://doi.org/10.3390/mi16060618
Wu J, Li H, Zhou Y, Gao G, Zhou T, Wang Z, Zheng H. Reconfigurable Orbital Electrowetting for Controllable Droplet Transport on Slippery Surfaces. Micromachines. 2025; 16(6):618. https://doi.org/10.3390/mi16060618
Chicago/Turabian StyleWu, Jiayao, Huafei Li, Yifan Zhou, Ge Gao, Teng Zhou, Ziyu Wang, and Huai Zheng. 2025. "Reconfigurable Orbital Electrowetting for Controllable Droplet Transport on Slippery Surfaces" Micromachines 16, no. 6: 618. https://doi.org/10.3390/mi16060618
APA StyleWu, J., Li, H., Zhou, Y., Gao, G., Zhou, T., Wang, Z., & Zheng, H. (2025). Reconfigurable Orbital Electrowetting for Controllable Droplet Transport on Slippery Surfaces. Micromachines, 16(6), 618. https://doi.org/10.3390/mi16060618