
A Load-Adaptive Driving Method for a Quasi-Continuous-Wave Laser Diode

Abstract
1. Introduction
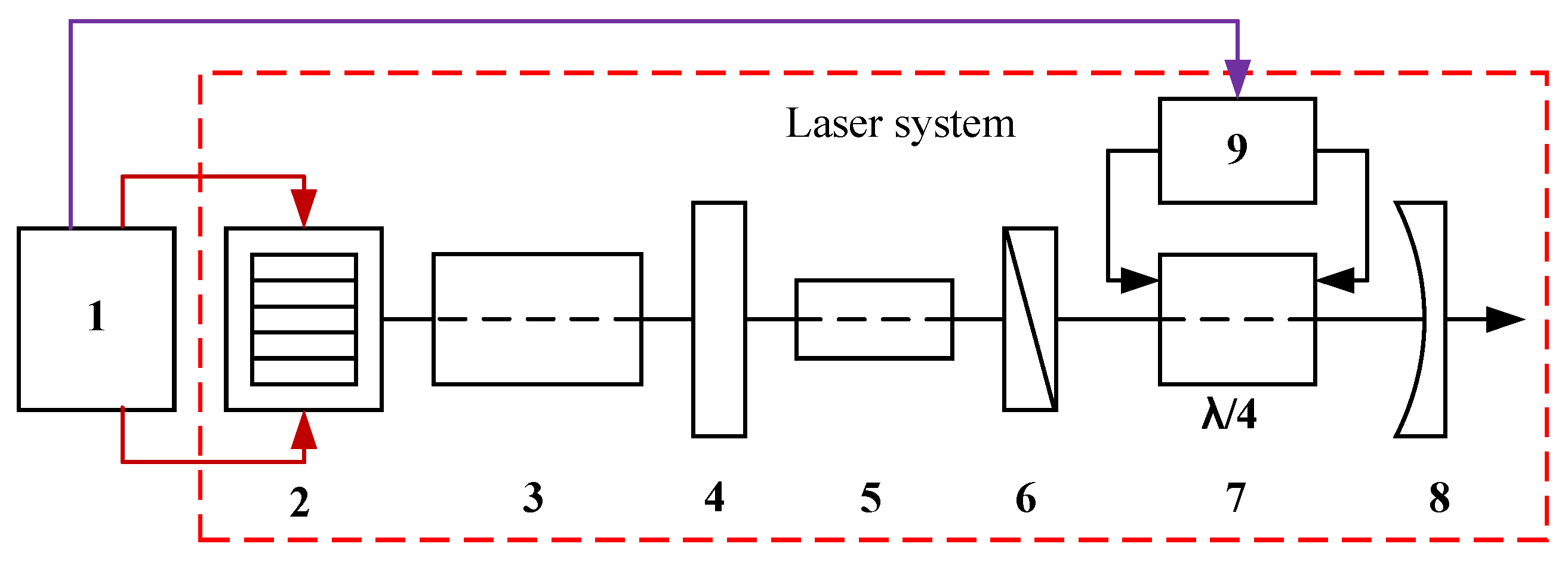
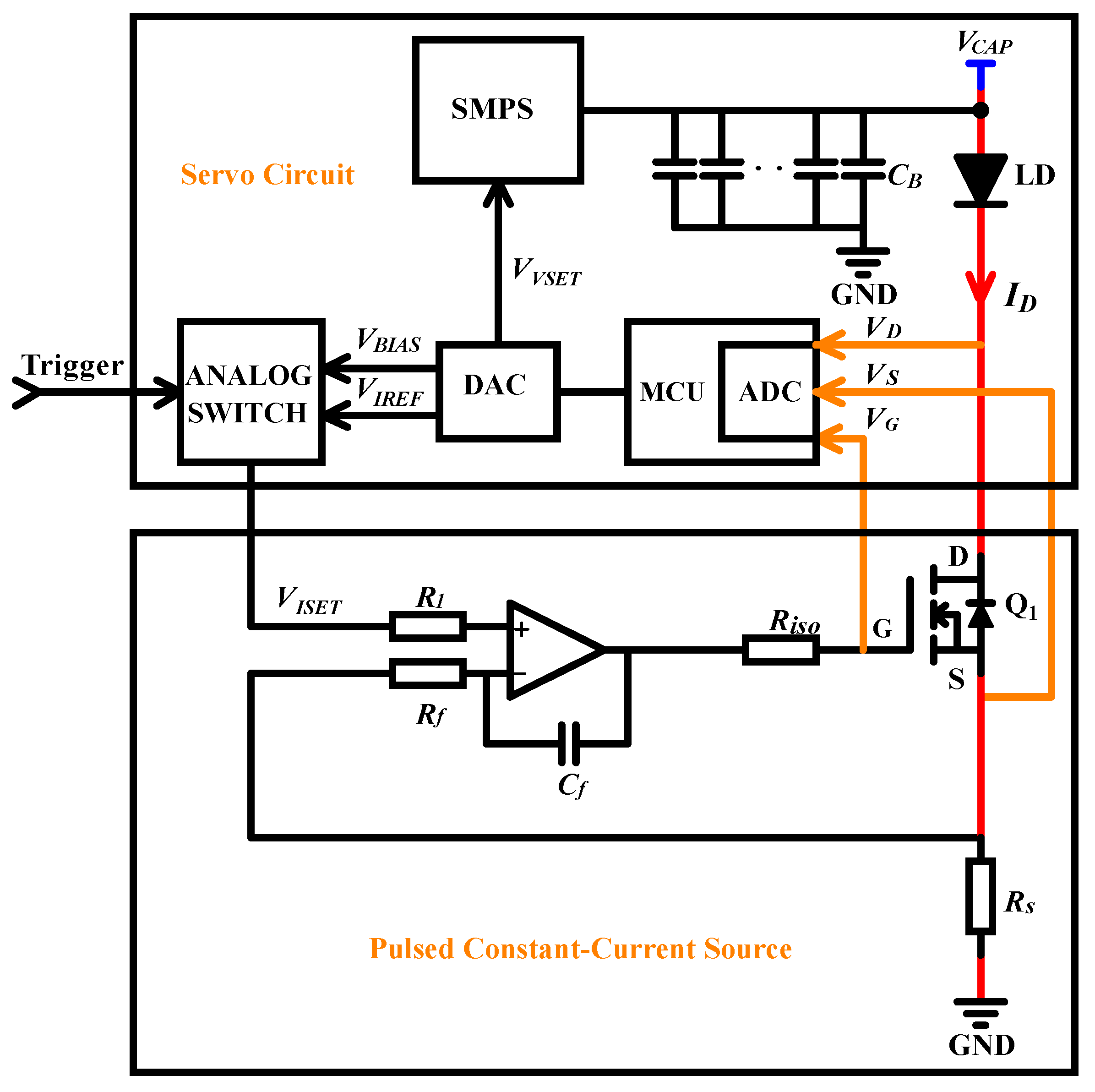
1.1. Description of the QCW LD Driver
1.2. Principle and Characteristics of a Conventional QCW LD Driver
- (1)
- Before using a driver, the user should estimate the minimum voltage of the SMPS according to the load and the characteristics of the driver (refer to Equation (5)). Specifying values for , and is challenging, and so, a perfect is also difficult to obtain, usually only possible through complex experiments to estimate a median value, potentially sacrificing power efficiency by leaving too great a margin.
- (2)
- In the case of a fixed , decreases with increasing loads, the MOSFET may enter the linear region if does not have sufficient margin, and, in extreme cases, does not reach the set value. In addition, increases as the load decreases, and then the MOSFET losses increase, reducing the efficiency of the power supply.
1.3. Principle and Advantages of Load-Adaptive QCW LD Drivers
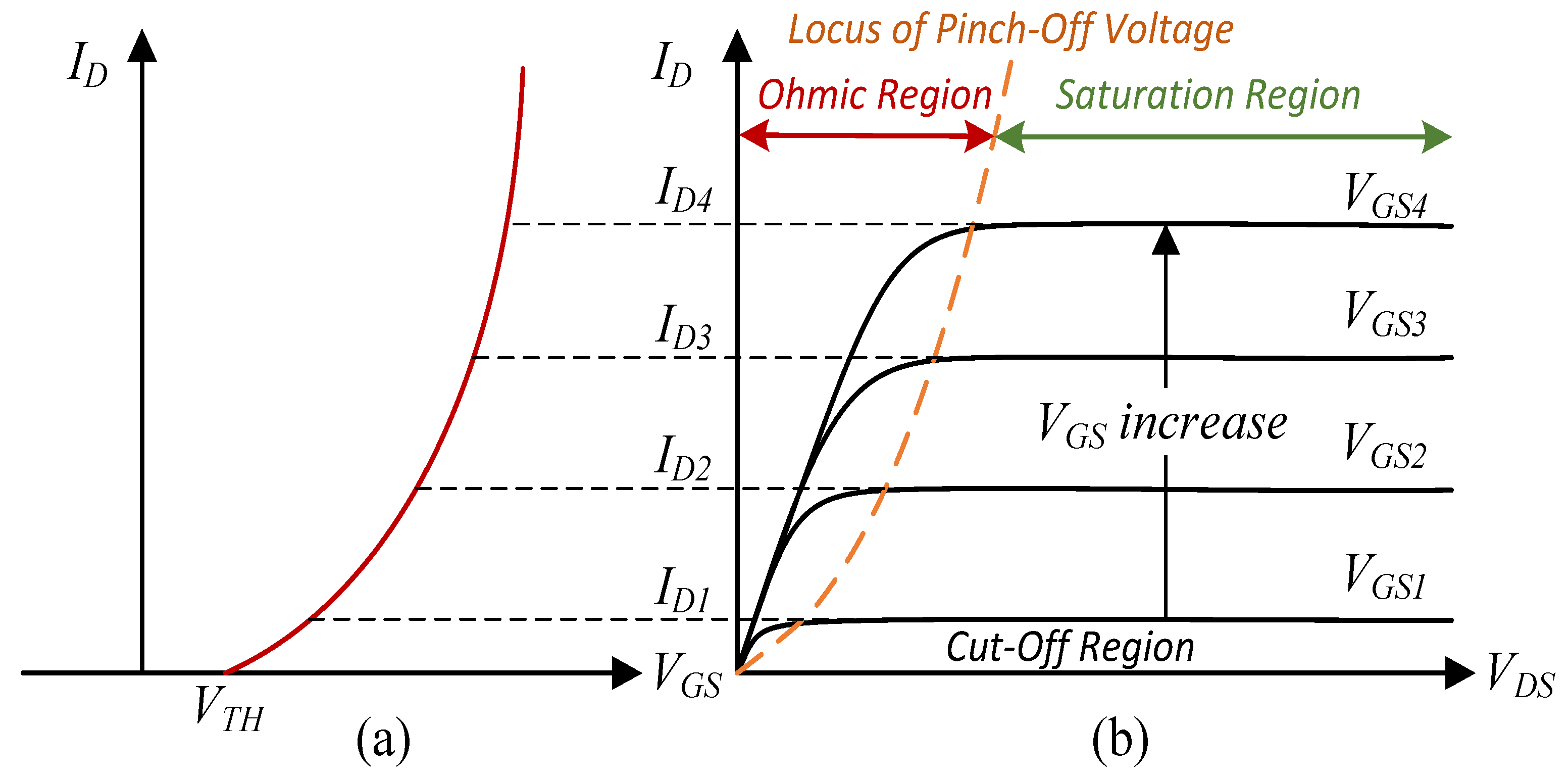
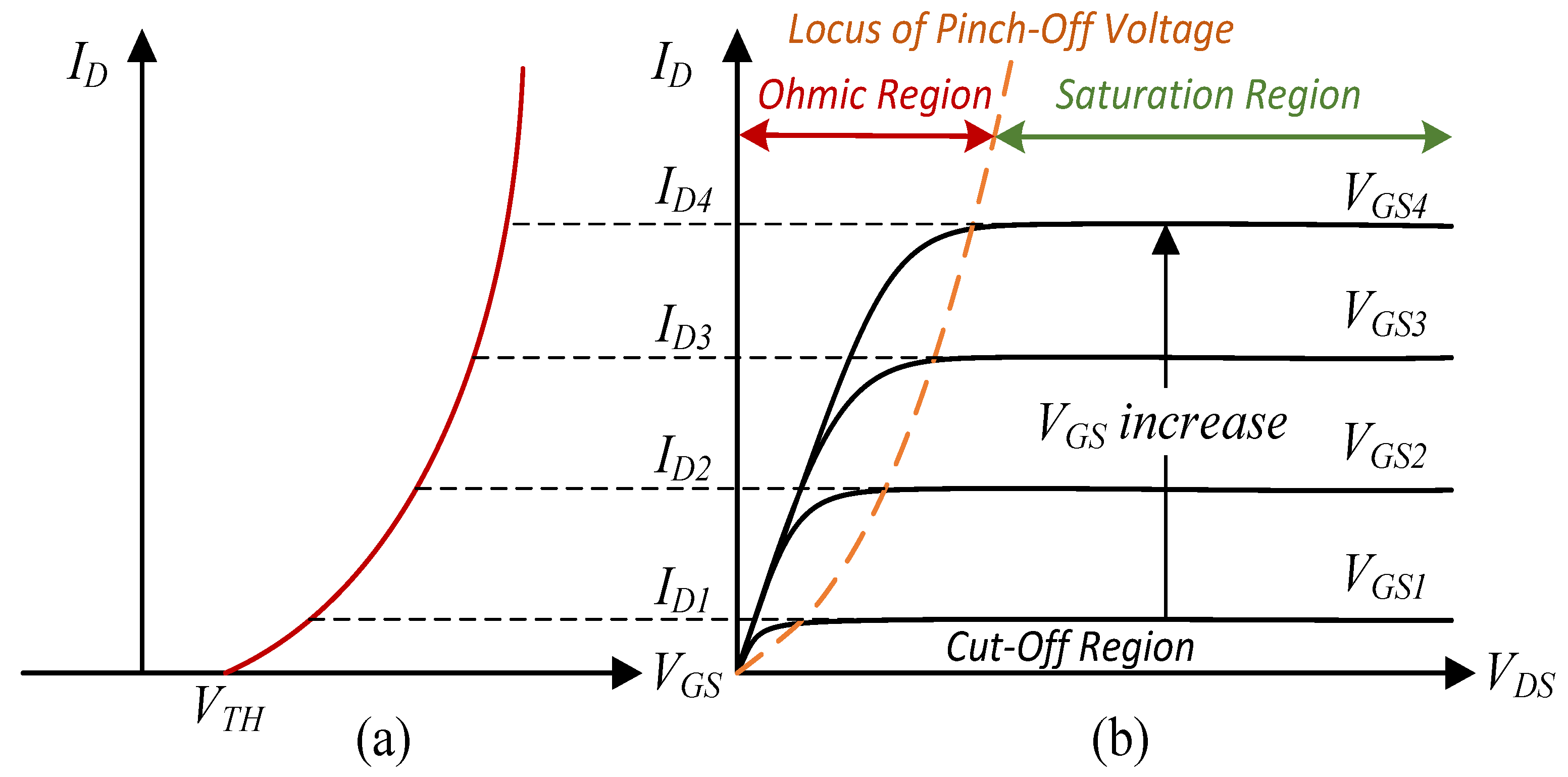
1.3.1. Features of MOSFETs
- (1)
- Cut-off region
- (2)
- Ohmic or linear region
- (3)
- Saturation region
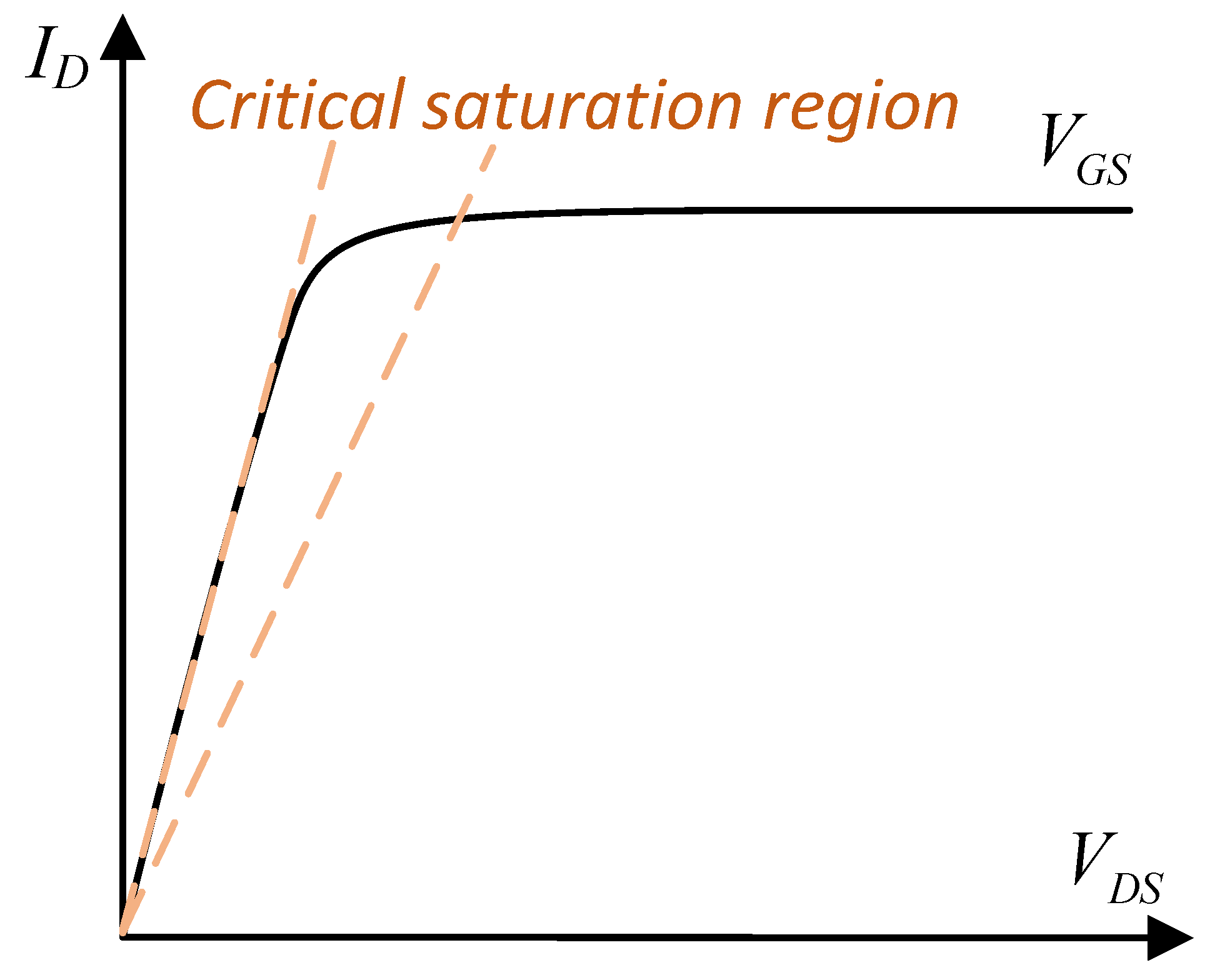
1.3.2. Load-Adaptive Driving Method
- (1)
- Choose the operating point in the critical saturation region.
- (2)
- Obtain the threshold voltage
- (3)
- Control automatically
1.3.3. Advantages of Load-Adaptive QCW LD Drivers
- (1)
- Traditional drivers require users to estimate the SMPS output voltage according to the driver and load parameters, or the user must estimate the appropriate through complex experiments, which are difficult and troublesome. Thus, either the power efficiency is low or the ability to resist voltage disturbance is poor. Our driver can automatically find the optimal operating voltage, thereby reducing the need for manual manipulation and its associated risks.
- (2)
- Traditional drivers typically operate a MOSFET in the saturation region, where has a large margin, resulting in large and MOSFET losses. Our driver enables the MOSFET to operate in the critical saturation region, minimizing and, thus, MOSFET losses and improving power efficiency.
- (3)
- Traditional drivers have a fixed during operation and cannot adapt to load changes automatically. Our driver can detect the operating voltage of the three terminals of the MOSFET in real time and recalculate the appropriate operating voltage when the load changes, such that the MOSFET can keep working in the critical saturation region and maintains high power efficiency.
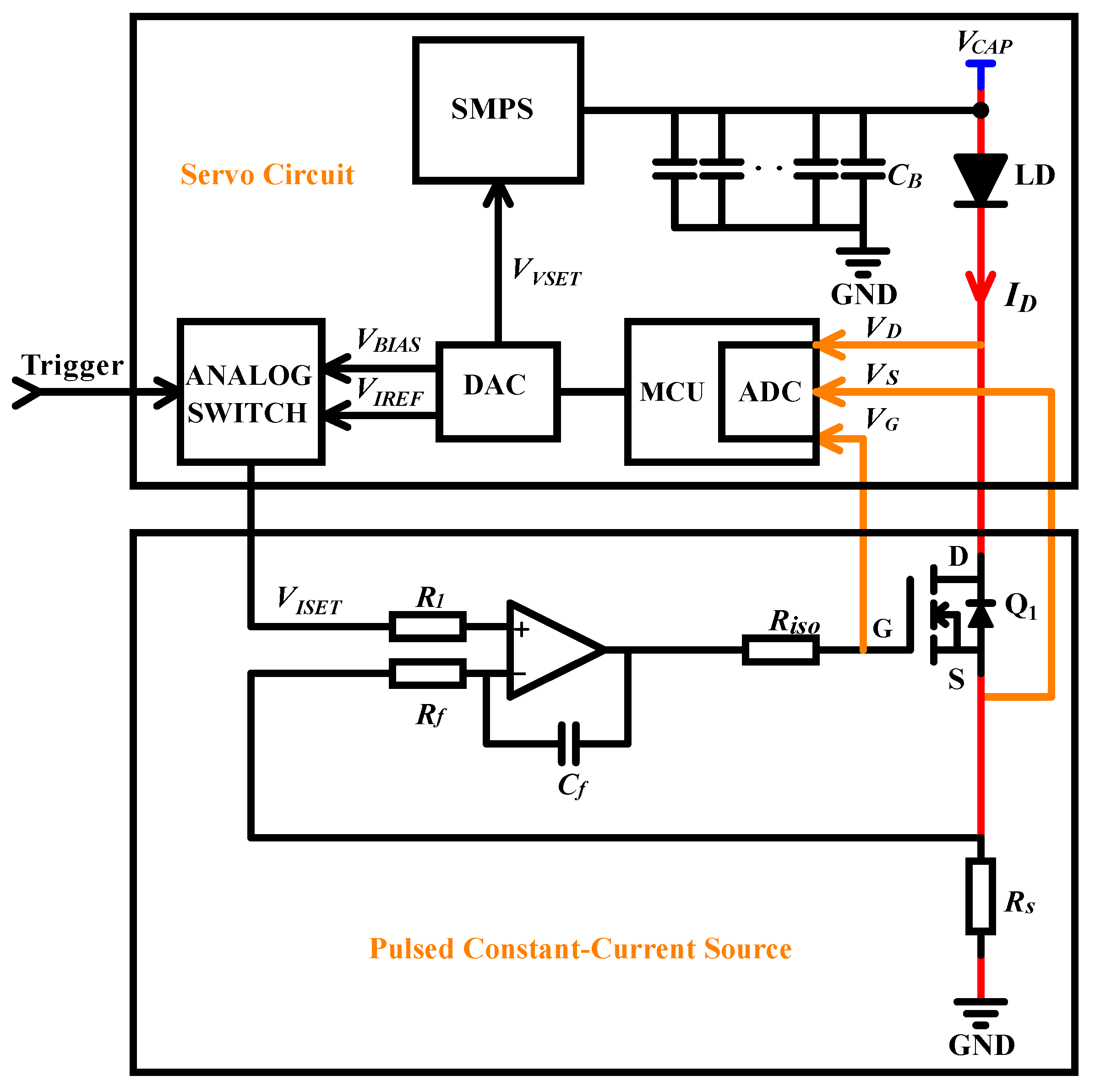
2. Design and Implementations
2.1. Design Specifications and Block Diagrams
2.2. Selection of the Main Components
2.2.1. Selection of a MOSFET
2.2.2. Selection of the Op-Amps
2.2.3. Capacity of the Capacitor Bank
2.2.4. Selection of the SMPS
2.2.5. Selection of the Sampling Resistor
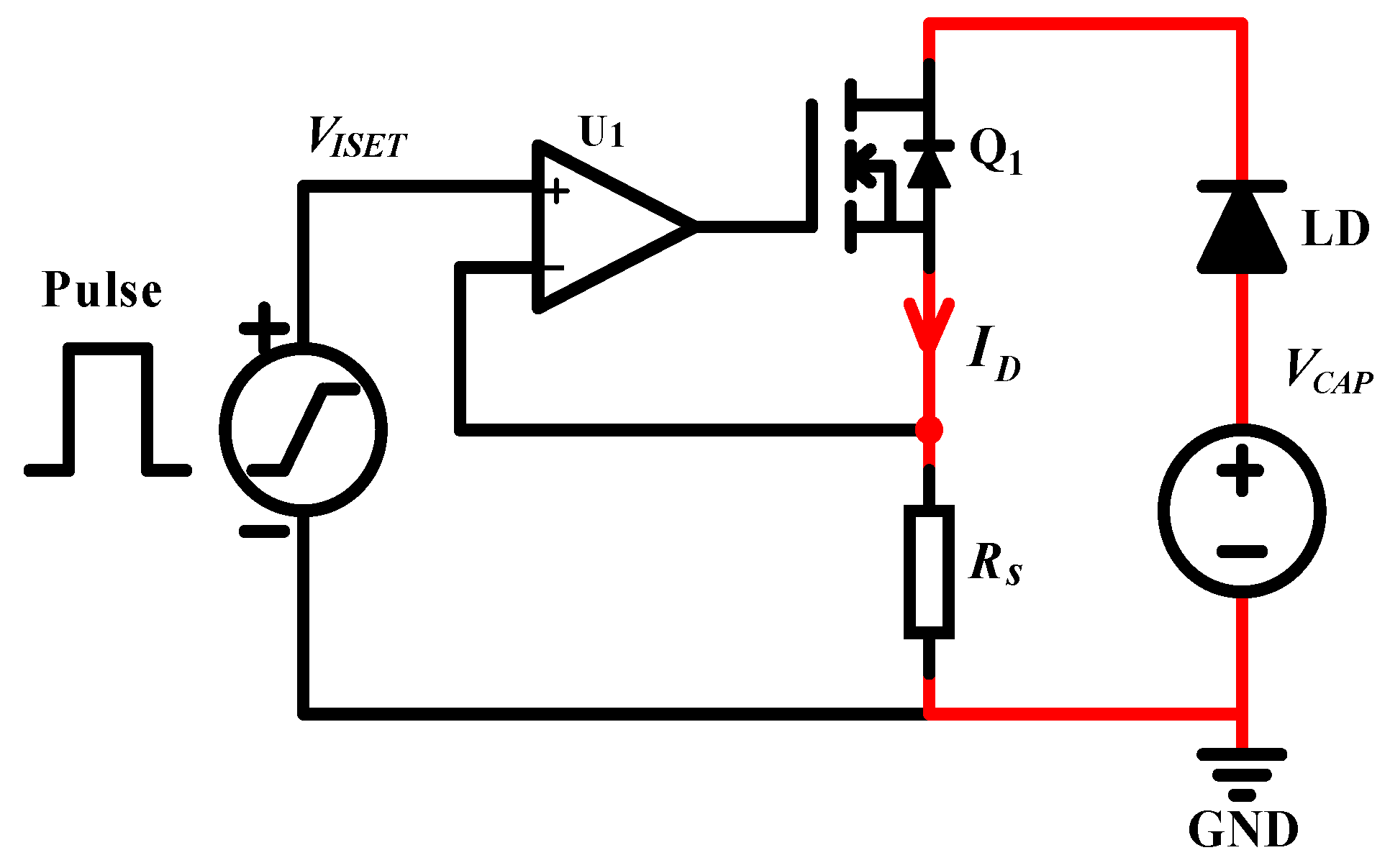
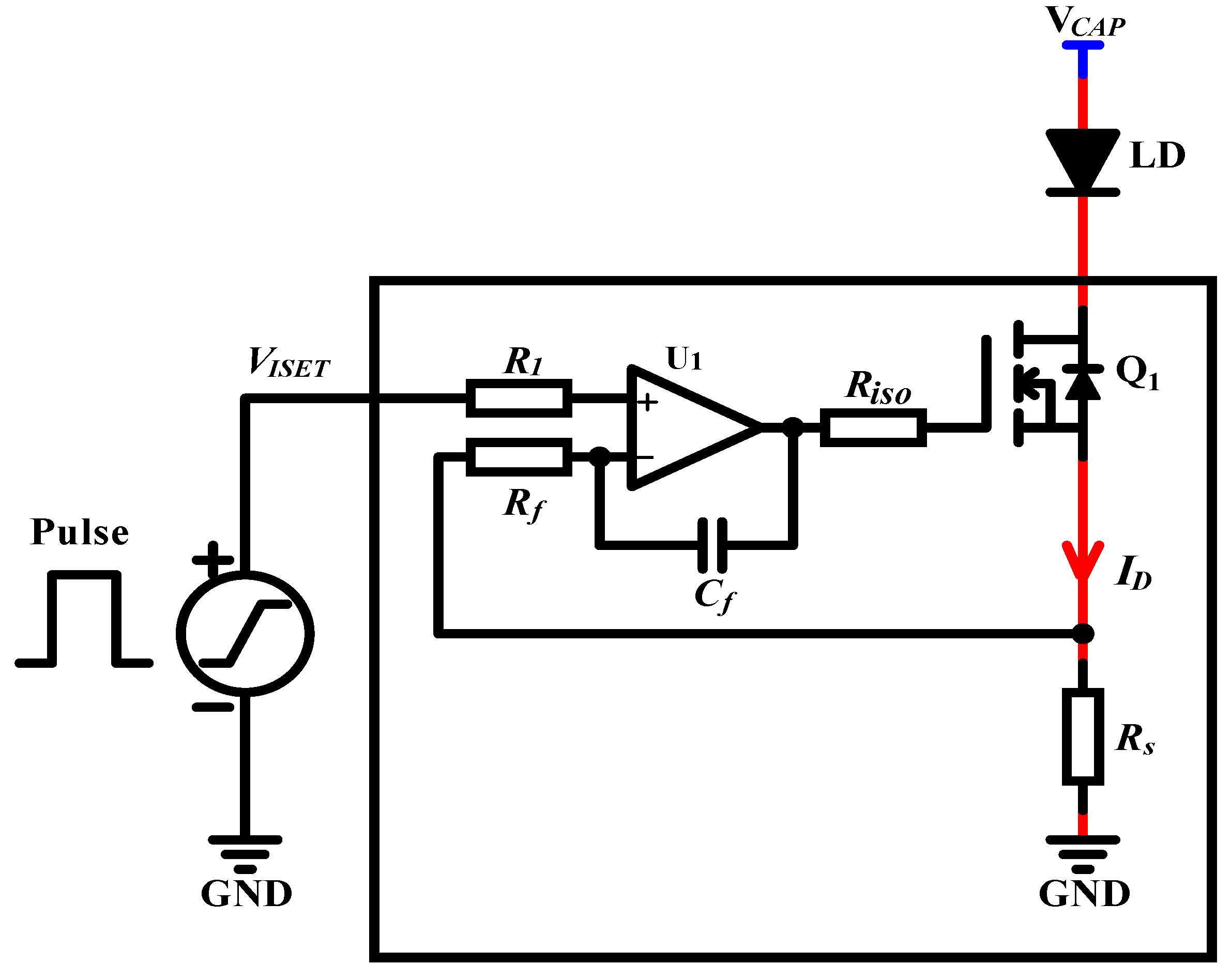
2.3. Pulsed Constant-Current Source Circuit
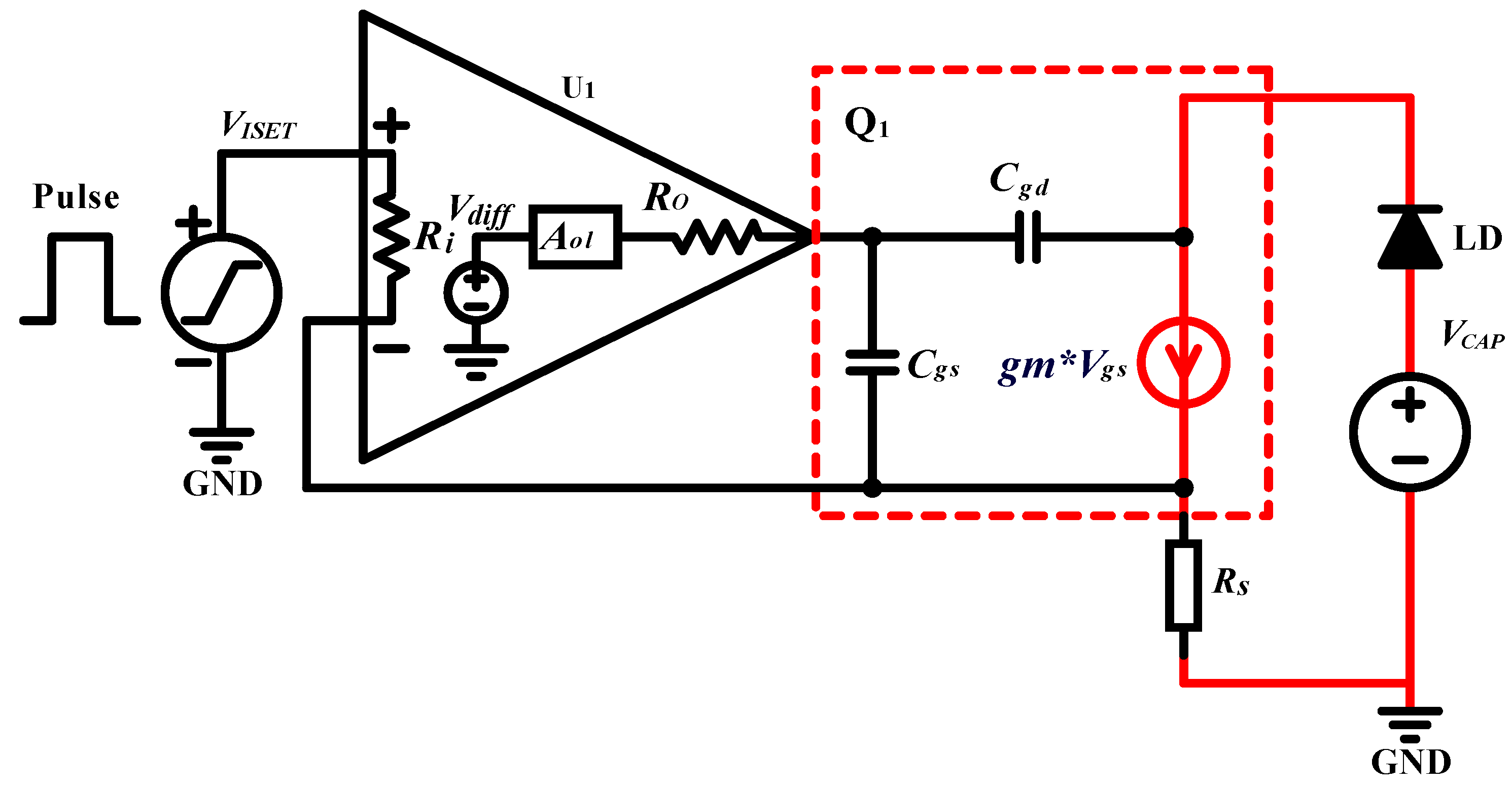
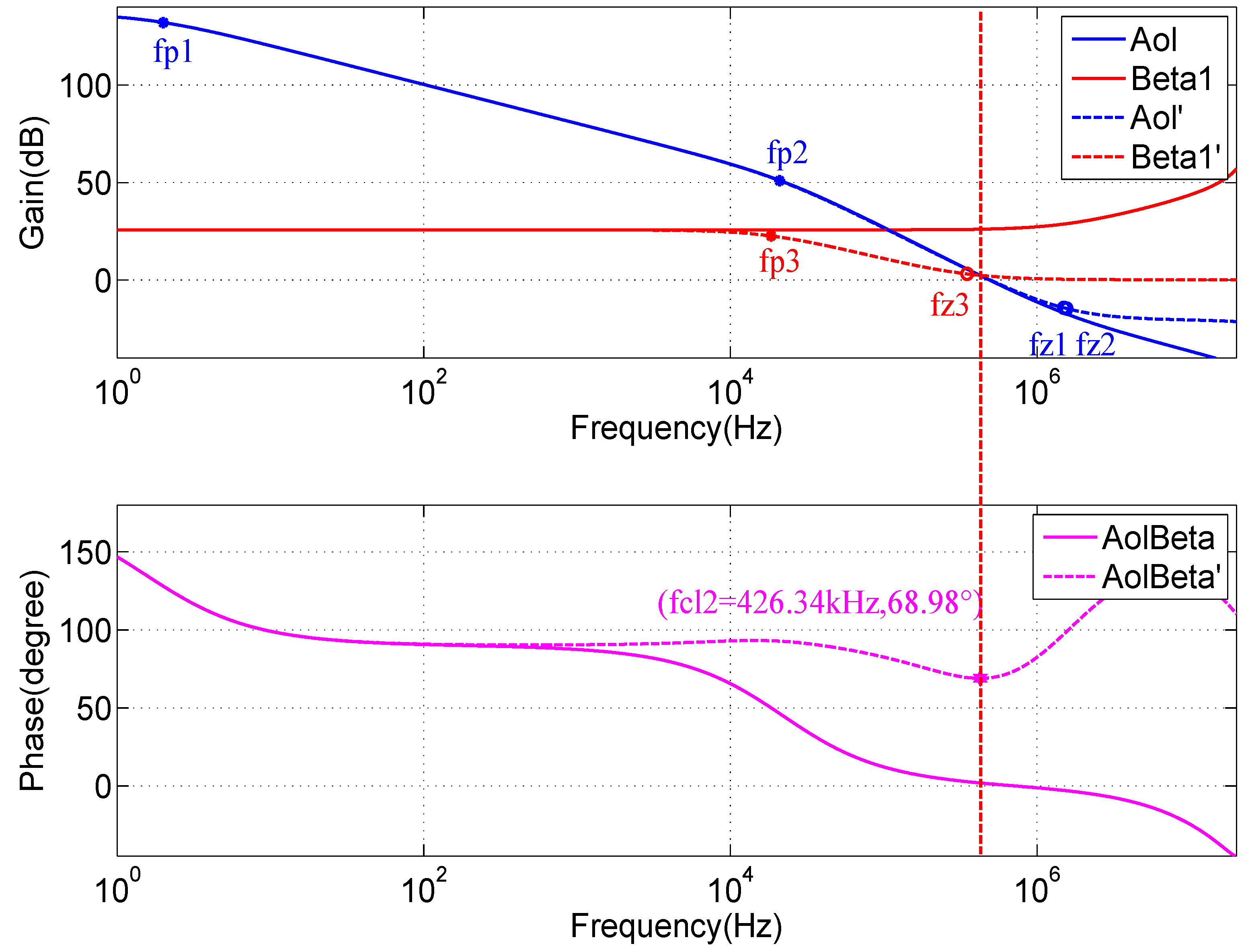
2.3.1. Stability Analysis
2.3.2. Compensation
2.3.3. Effect of Compensation on the Curve
2.3.4. Effect of Compensation on the Beta1 Curve
2.3.5. Stability Analysis
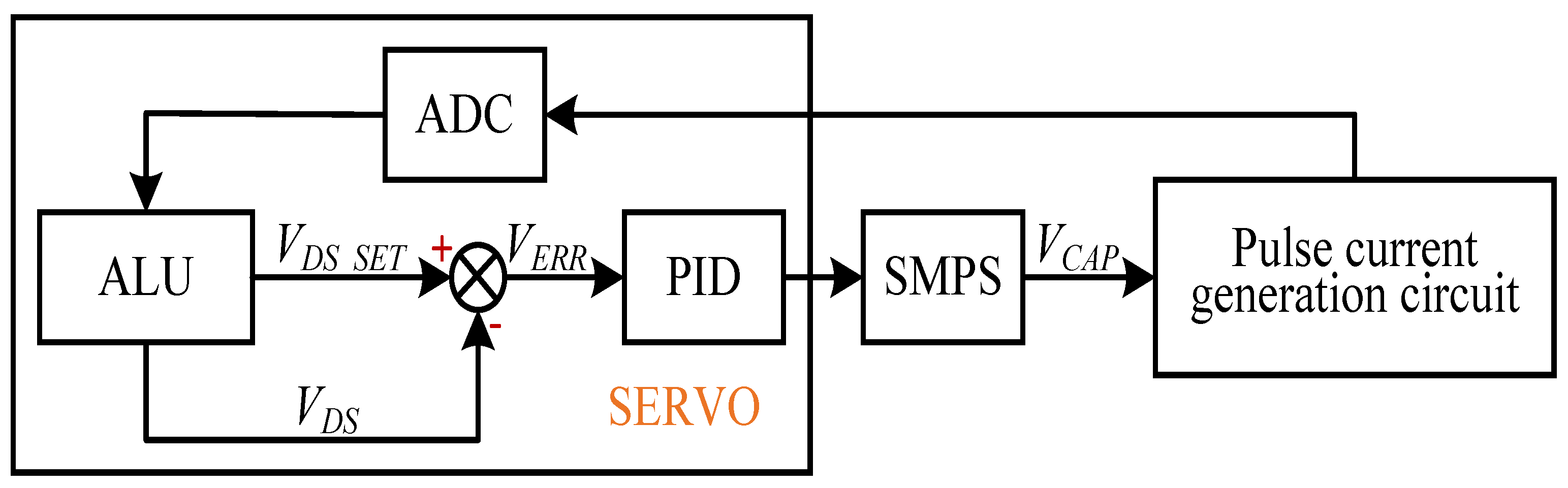
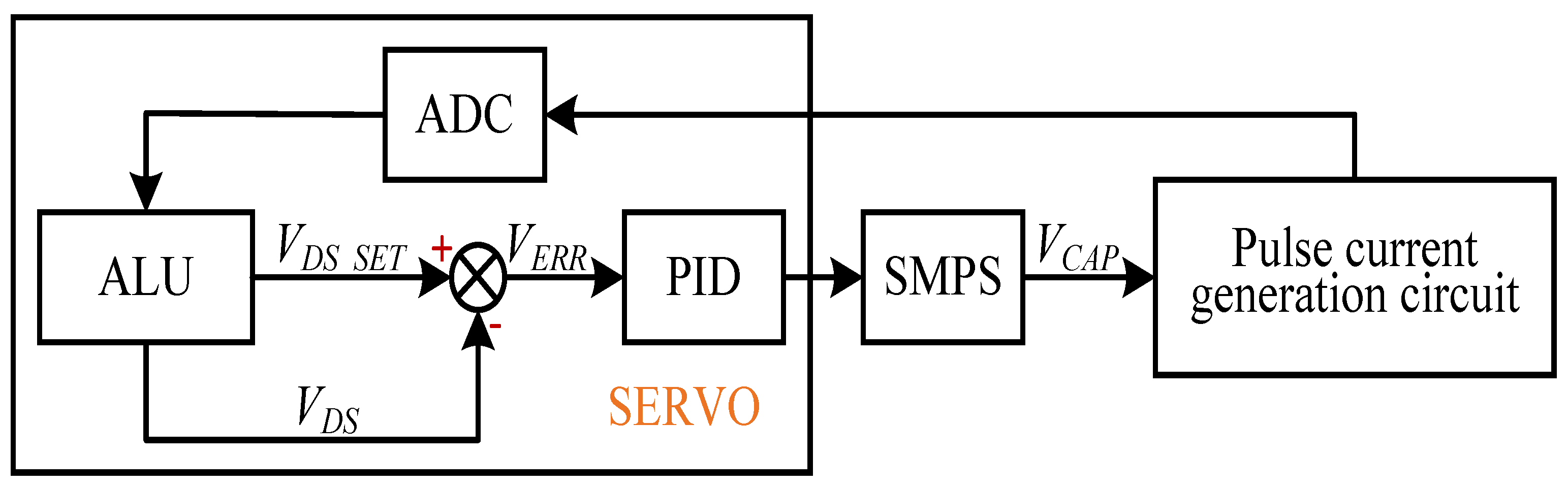
2.4. Implementation of the Load-Adaptive Driving Methods
2.4.1. PID Control Theory
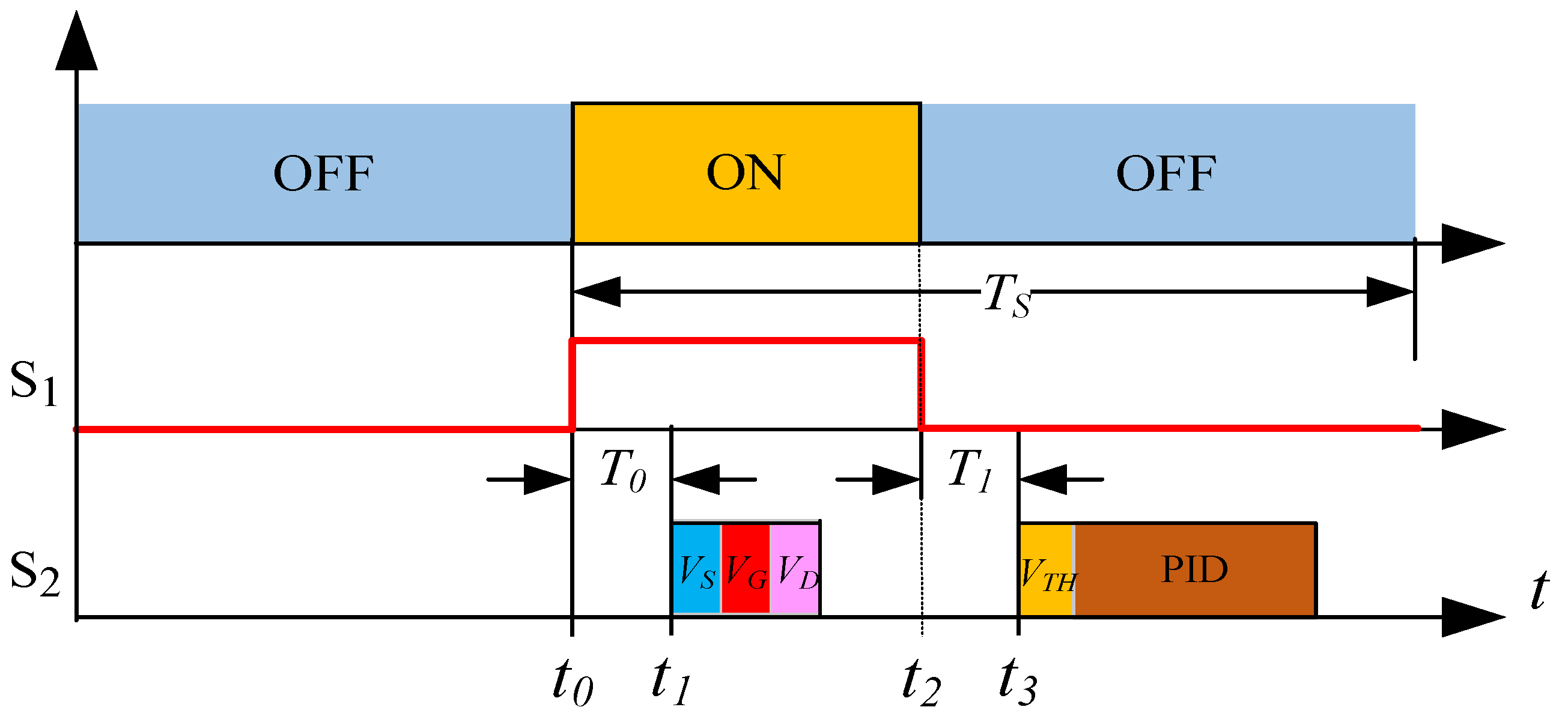
2.4.2. Control Process of the Load-Adaptive Driving Method
3. Experimental Result
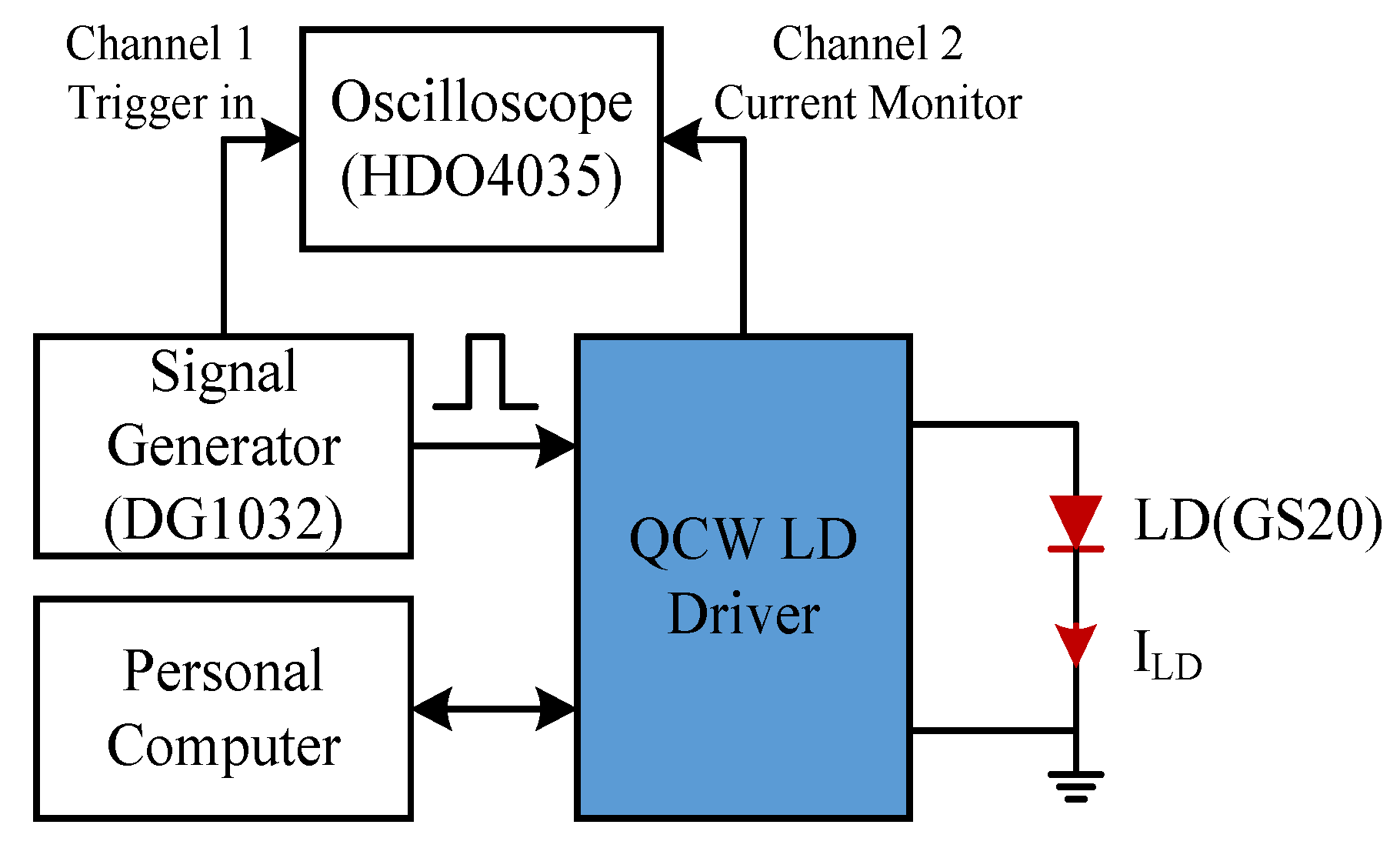
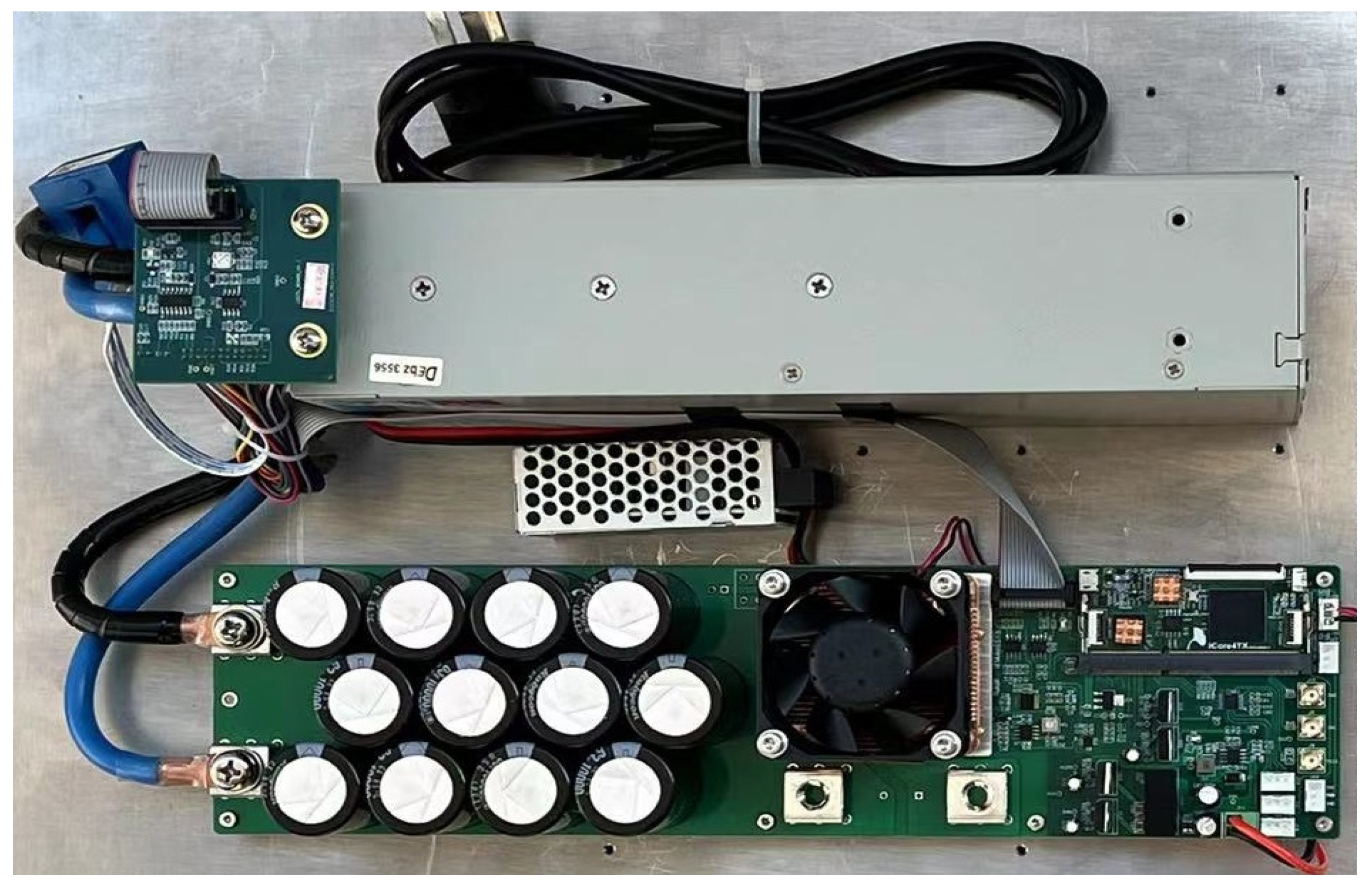
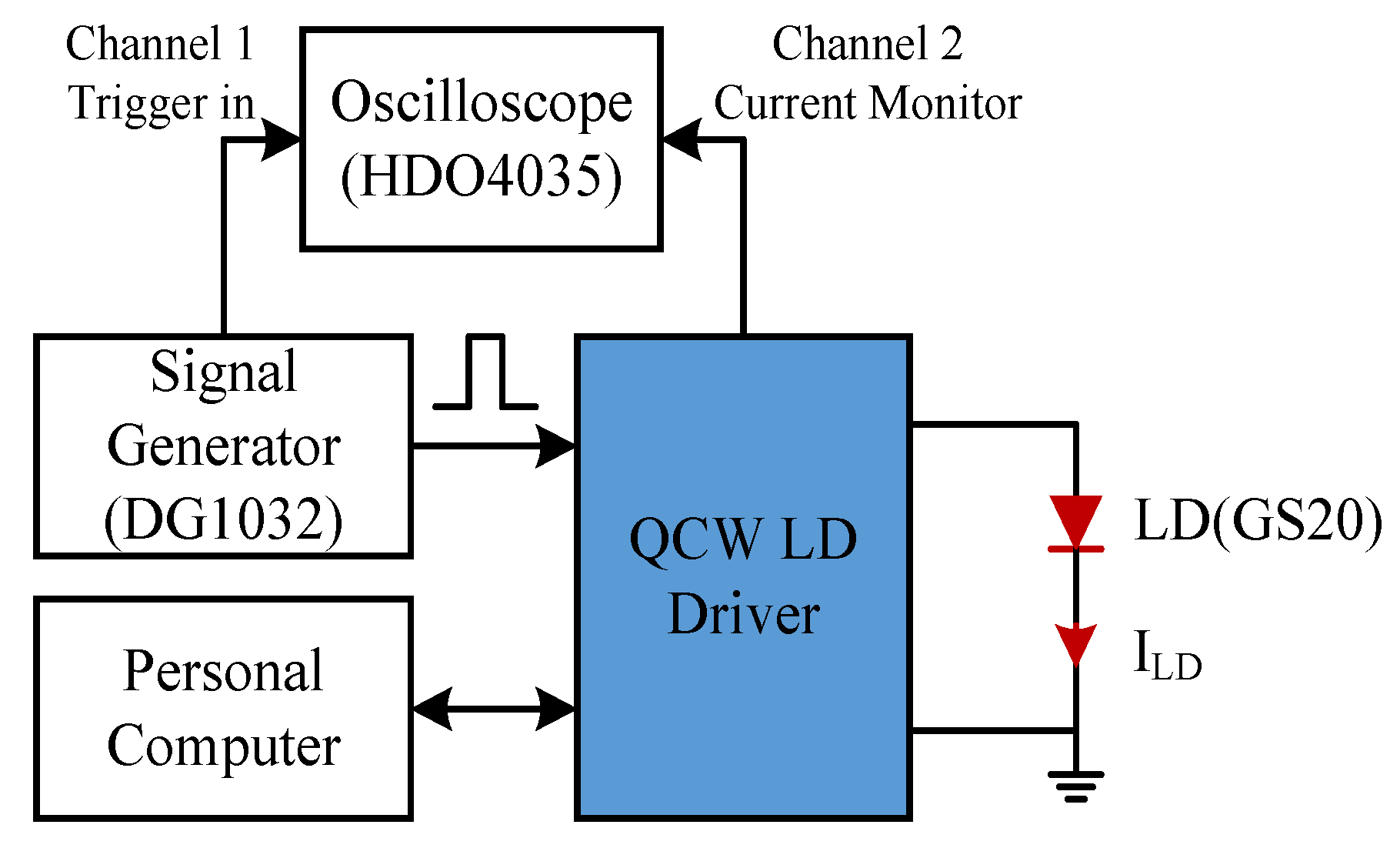
3.1. Experiment Setup
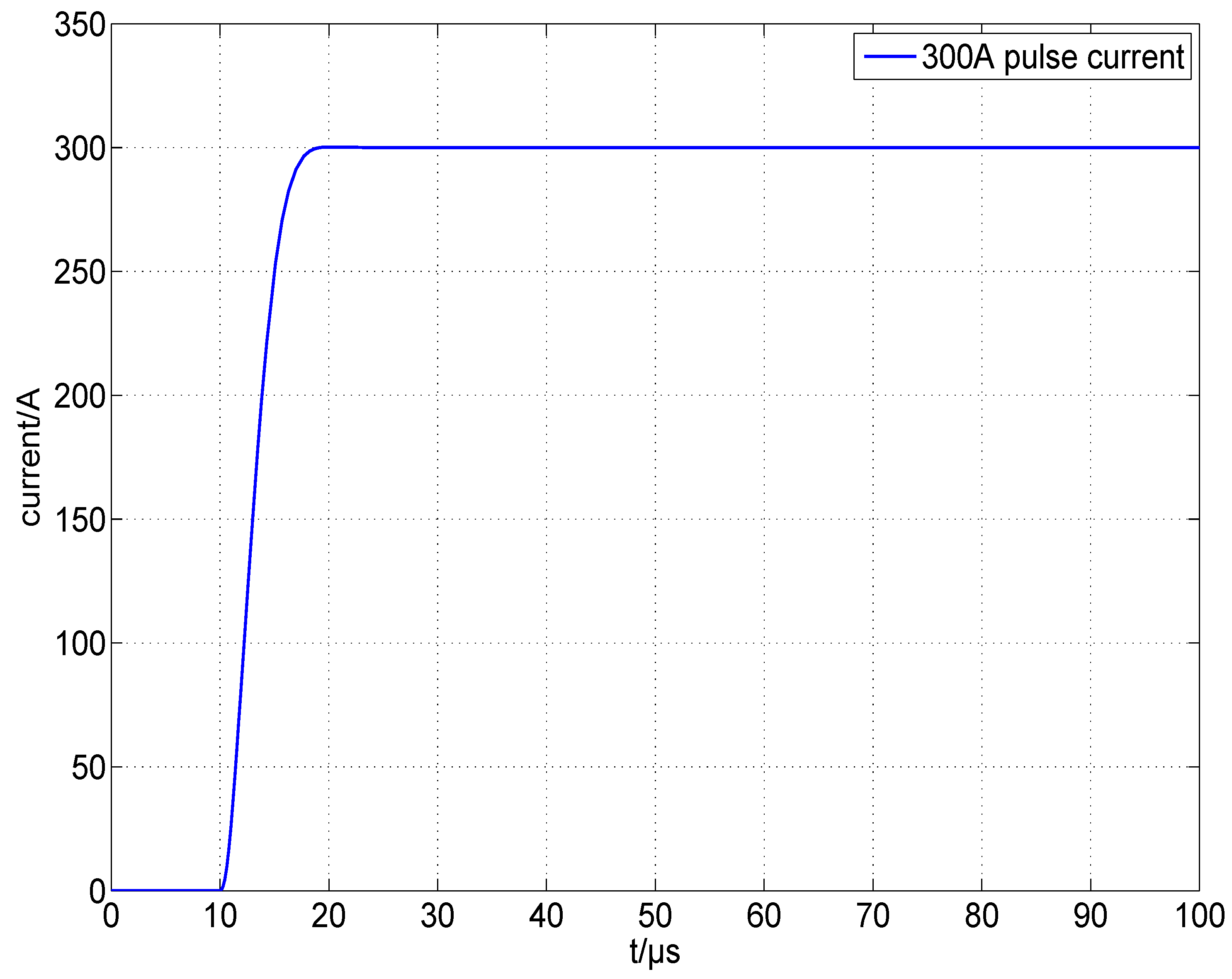
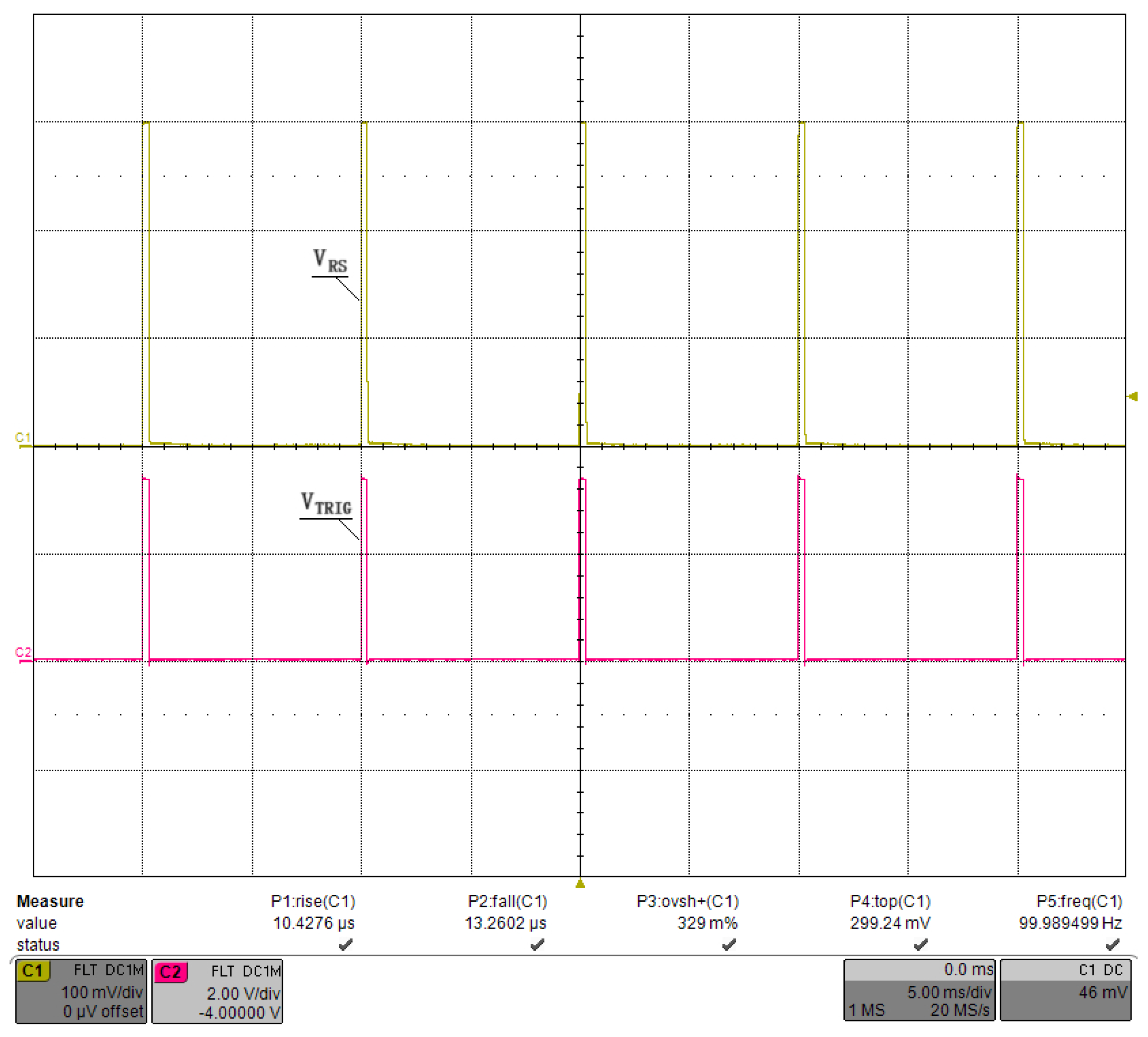
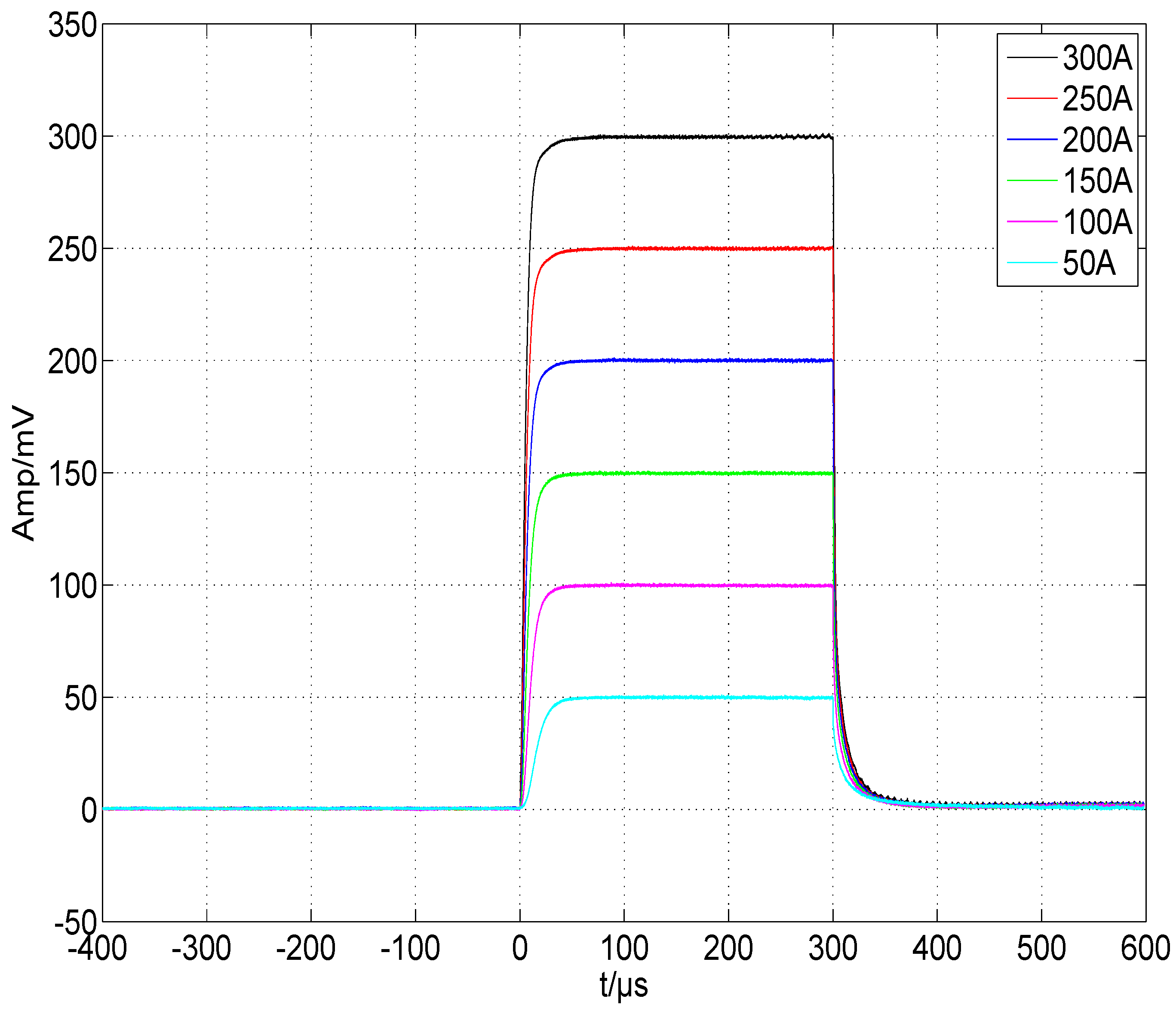
3.2. Pulsed Constant-Current Source Test
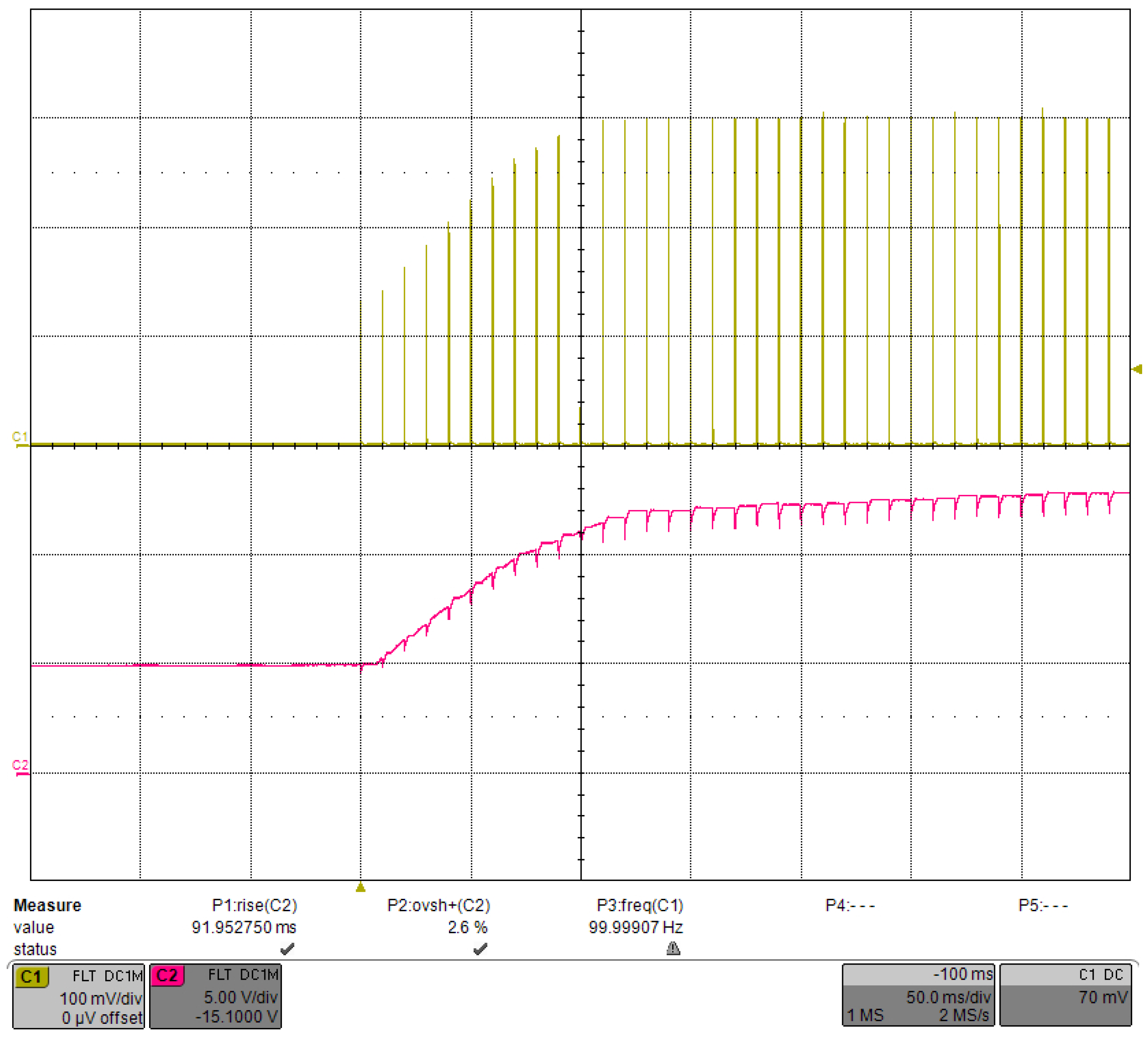
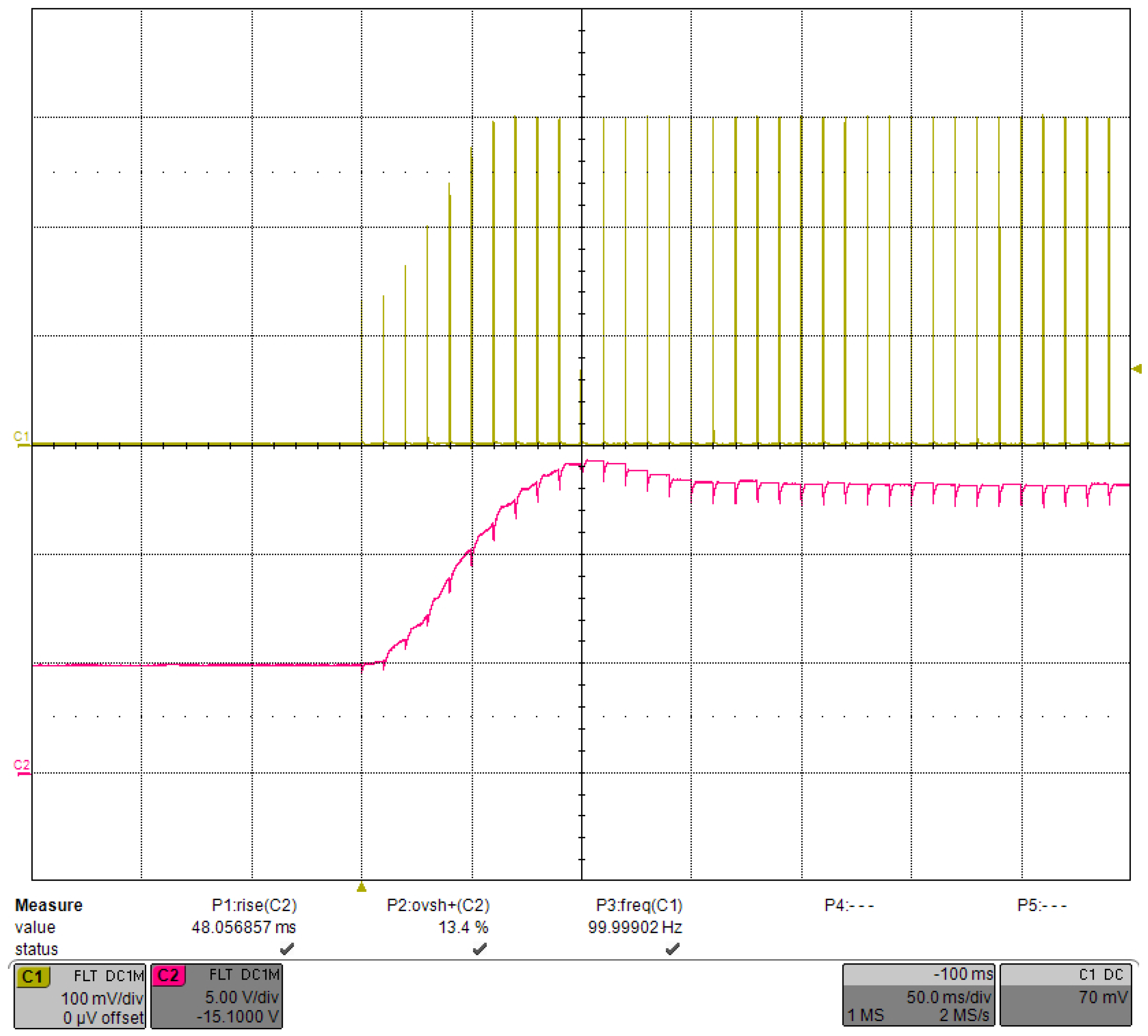
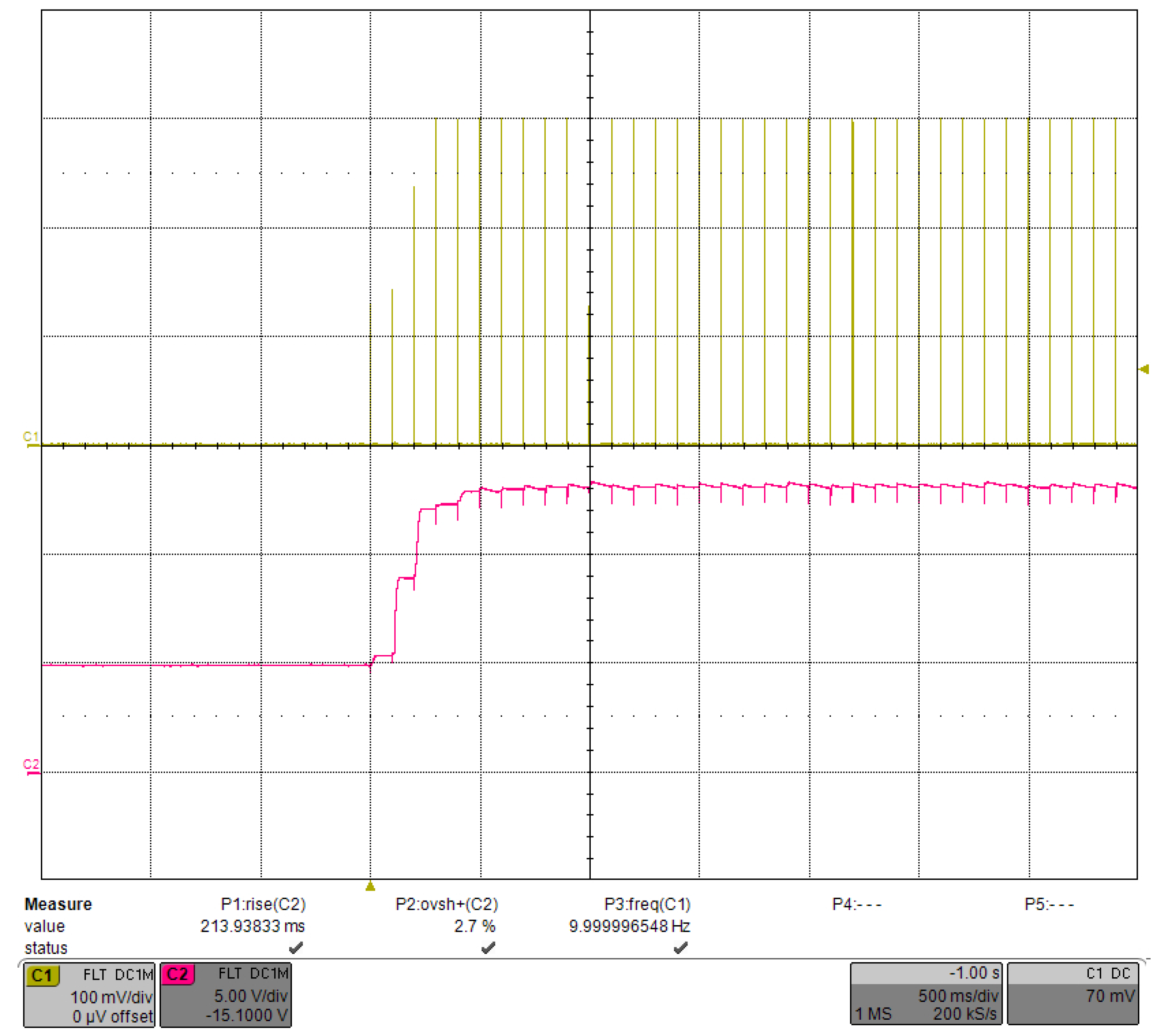
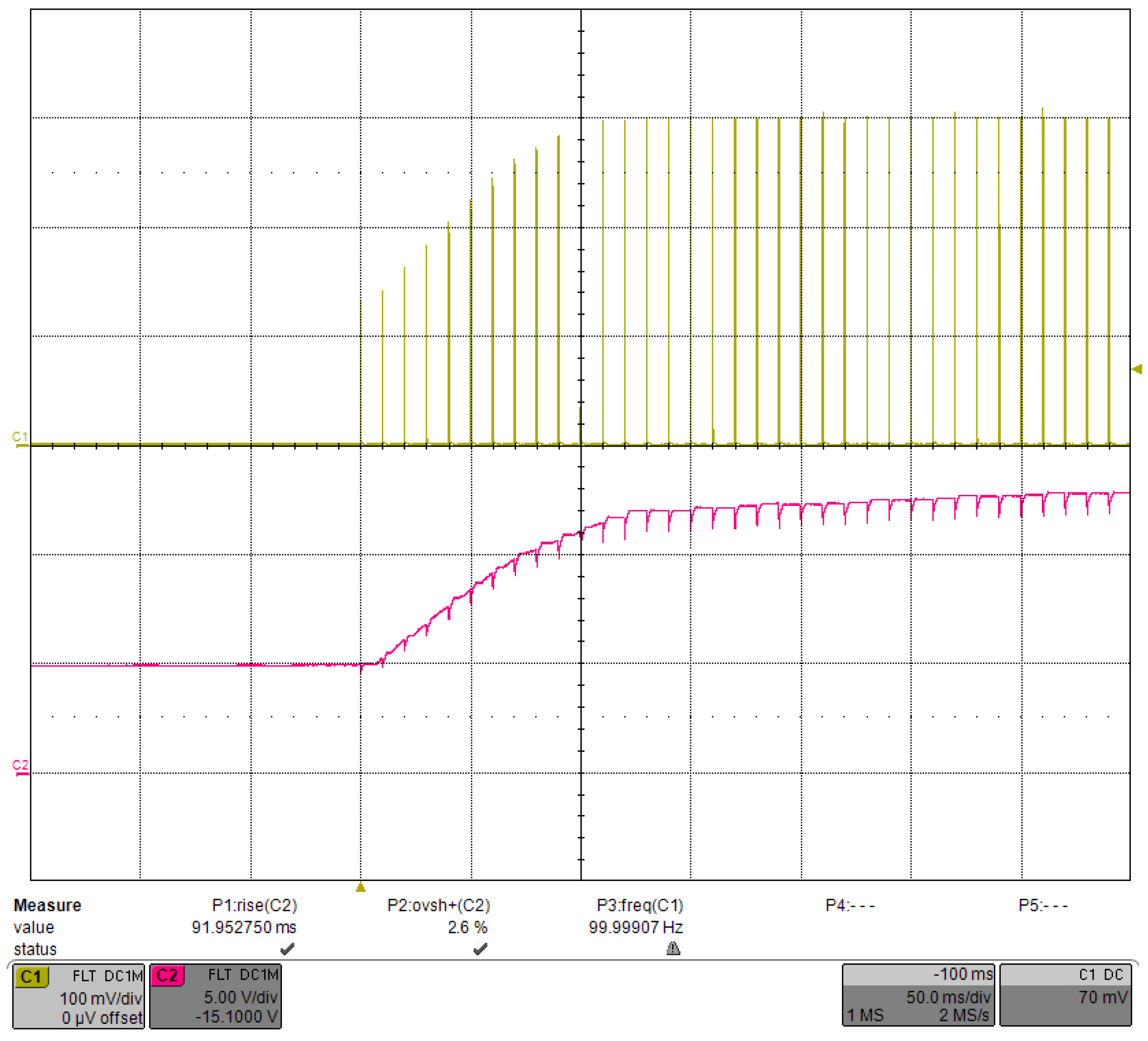
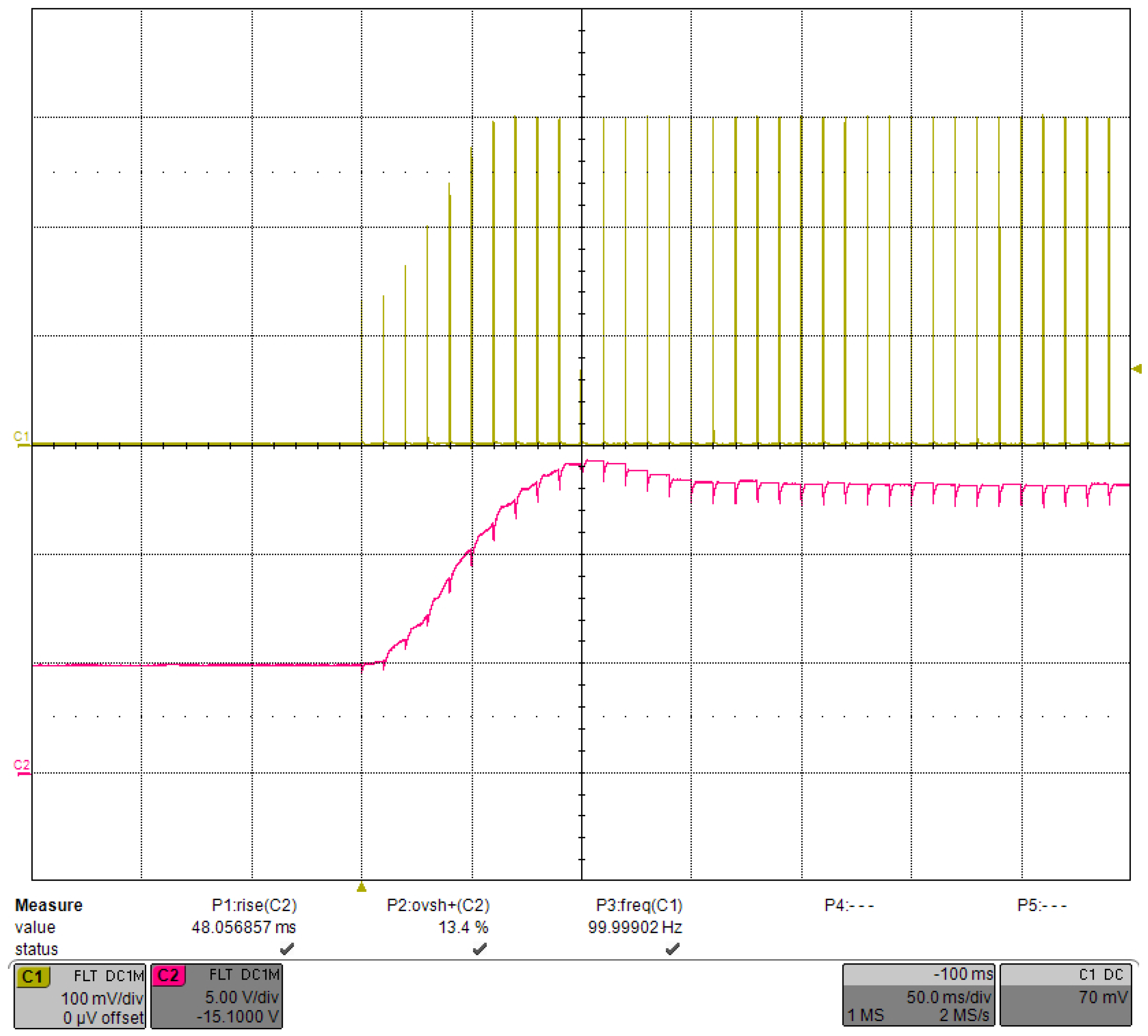
3.3. Load-Adaptive Driving Test
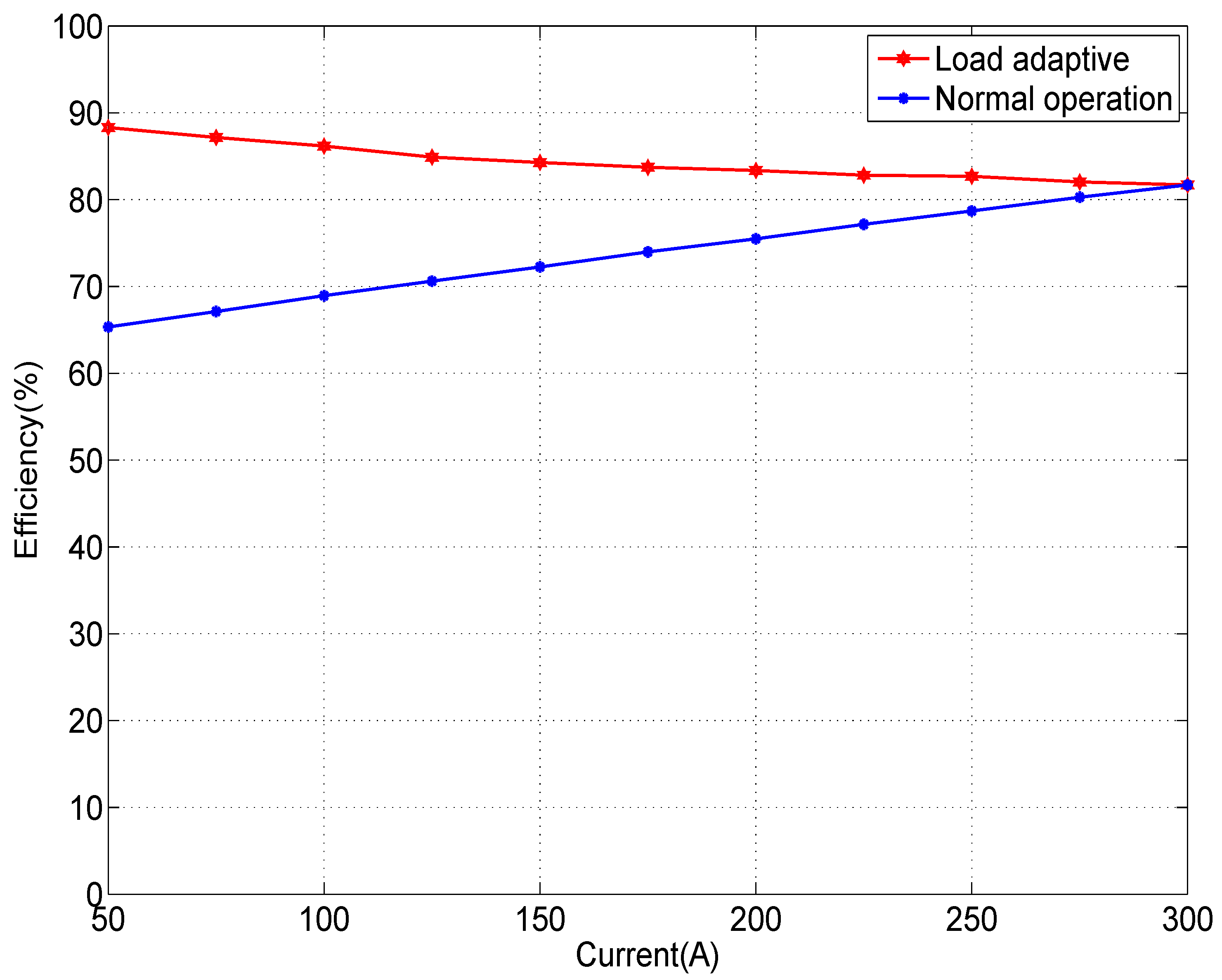
3.4. Power Efficiency Test
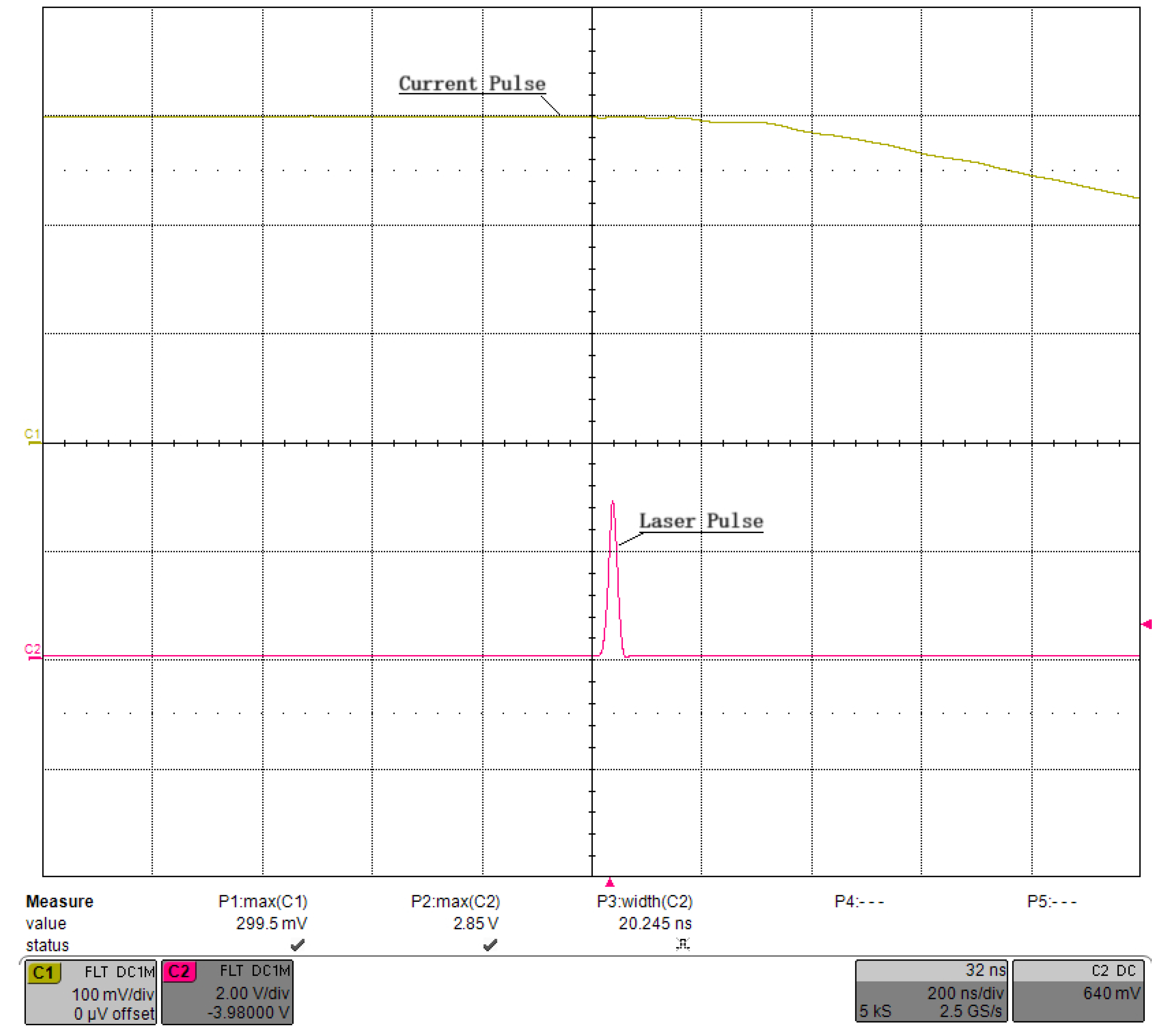
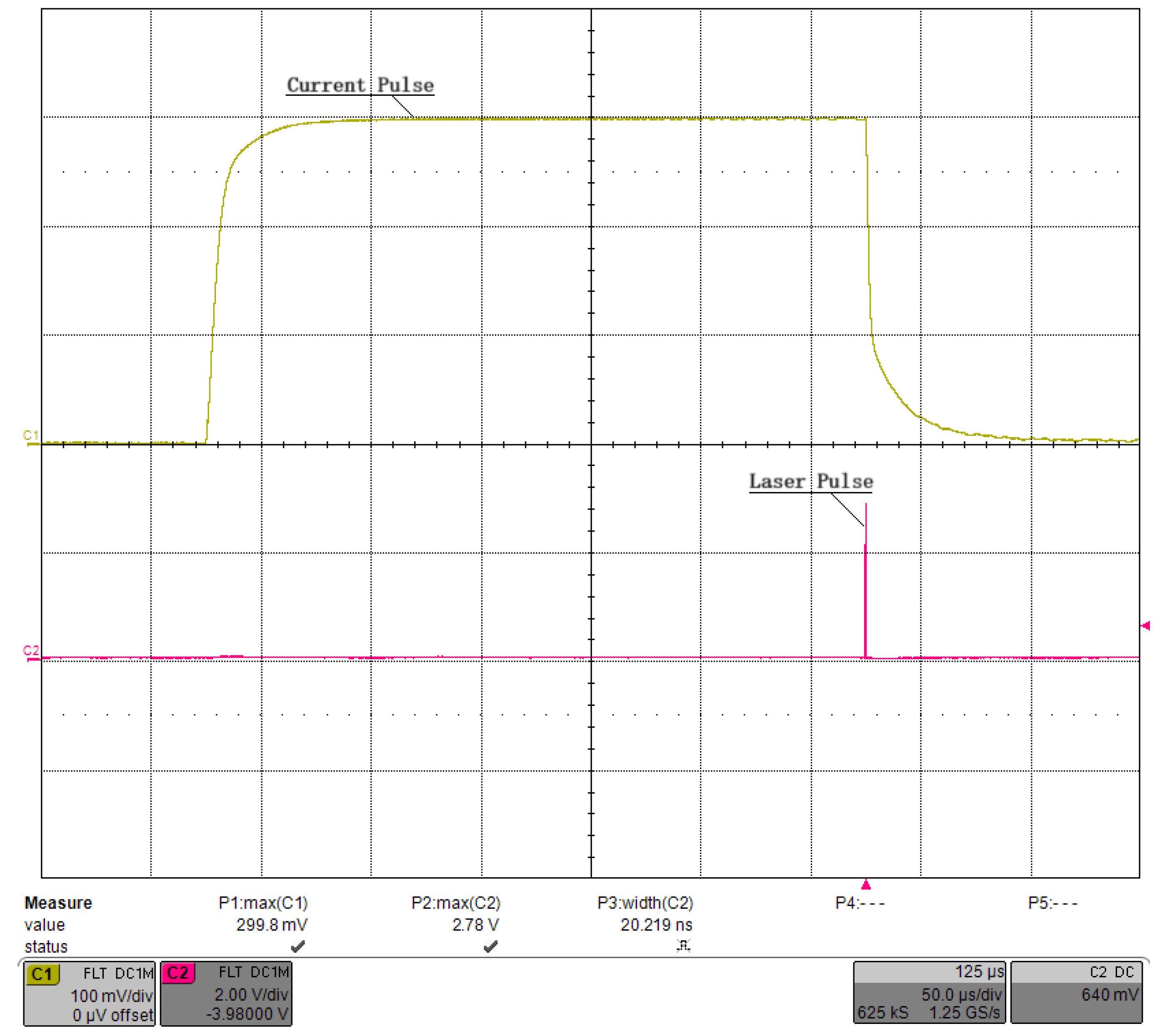
3.5. Test of Driving a QCW Laser
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Orth, C.; Payne, S.; Krupke, W. A diode pumped solid state laser driver for inertial fusion energy. Nucl. Fusion 1996, 36, 75. [Google Scholar] [CrossRef]
- Kunna, H.; Zhiyi, W.; Zhiguo, Z. Overview on laser diode pumped solid-state laser with direct pumping scheme. Chin. J. Lasers 2009, 36, 1679–1685. [Google Scholar] [CrossRef]
- Novák, O.; Miura, T.; Smrž, M.; Chyla, M.; Nagisetty, S.S.; Mužík, J.; Linnemann, J.; Turčičová, H.; Jambunathan, V.; Slezák, O.; et al. Status of the high average power diode-pumped solid state laser development at HiLASE. Appl. Sci. 2015, 5, 637–665. [Google Scholar] [CrossRef]
- Divoky, M.; Smrz, M.; Chyla, M.; Sikocinski, P.; Severova, P.; Novak, O.; Huynh, J.; Nagisetty, S.; Miura, T.; Pilař, J.; et al. Overview of the HiLASE project: High average power pulsed DPSSL systems for research and industry. High Power Laser Sci. Eng. 2014, 2, e14. [Google Scholar] [CrossRef]
- Al-Muhanna, A.; Mawst, L.J.; Botez, D.; Garbuzov, D.; Martinelli, R.; Connolly, J. 14.3 W quasicontinuous wave front-facet power from broad-waveguide Al-free 970 nm diode lasers. Appl. Phys. Lett. 1997, 71, 1142–1144. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, J.; Peng, C.; Li, X.; Xiong, L.; Liu, X. A new package structure for high power single emitter semiconductor lasers. In Proceedings of the 2010 11th International Conference on Electronic Packaging Technology & High Density Packaging, Xi’an, China, 16–19 August 2010; pp. 1346–1349. [Google Scholar]
- Garbuzov, D.; Menna, R.; Martinelli, R.; Abeles, J.; Connolly, J. High power continuous and quasi-continuous wave InGaAsP/InP broad-waveguide separate confinement-heterostructure multiquantum well diode lasers. Electron. Lett. 1997, 33, 1635–1636. [Google Scholar] [CrossRef]
- Dascalu, T.; Taira, T.; Pavel, N. 100-W quasi-continuous-wave diode radially pumped microchip composite Yb: YAG laser. Opt. Lett. 2002, 27, 1791–1793. [Google Scholar] [CrossRef]
- Li, C.; Peng, Q.; Wang, B.; Bo, Y.; Cui, D.; Xu, Z.; Feng, X.; Pan, Y. QCW diode-side-pumped Nd: YAG ceramic laser with 247 W output power at 1123 nm. Appl. Phys. B 2011, 103, 285–289. [Google Scholar] [CrossRef]
- Hübner, M.; Wilkens, M.; Eppich, B.; Maaßdorf, A.; Martin, D.; Ginolas, A.; Basler, P.; Crump, P. A 1.4 kW 780 nm pulsed diode laser, high duty cycle, passively side-cooled pump module. Opt. Express 2021, 29, 9749–9757. [Google Scholar] [CrossRef]
- Dellunde, J.; Torrent, M. Optoelectronic feedback stabilization of current modulated laser diodes. Appl. Phys. Lett. 1996, 68, 1601–1603. [Google Scholar] [CrossRef]
- Shy, J.T.; Yang, C.R. Two-mode frequency stabilization of a 543-nm He–Ne laser using current feedback. Appl. Opt. 1989, 28, 4977–4978. [Google Scholar] [CrossRef]
- Sasaki, A.; Ushimaru, S.; Hayashi, T. Simultaneous output-and frequency-stabilization and single-frequency operation of an internal-mirror He–Ne laser by controlling the discharge current. Jpn. J. Appl. Phys. 1984, 23, 593. [Google Scholar] [CrossRef]
- Willke, B.; Brozek, S.; Danzmann, K.; Quetschke, V.; Gossler, S. Frequency stabilization of a monolithic Nd: YAG ring laser by controlling the power of the laser-diode pump source. Opt. Lett. 2000, 25, 1019–1021. [Google Scholar] [CrossRef] [PubMed]
- Sharma, A.; Panwar, C.; Arya, R.; Nath, A. Design of a high frequency SMPS powering laser diode. J. Instrum. Soc. India 2008, 38, 63–70. [Google Scholar]
- Sharma, A.; Panwar, C.; Arya, R. High power pulsed current laser diode driver. In Proceedings of the 2016 International Conference on Electrical Power and Energy Systems (ICEPES), Bhopal, India, 14–16 December 2016; pp. 120–126. [Google Scholar]
- Yankov, P.D.; Todorov, D. A DC 5-MHz 100-A laser-diode driver. In Integrated Optical Devices, Nanostructures, and Displays; SPIE: Bellingham, WA, USA, 2004; Volume 5618, pp. 90–95. [Google Scholar]
- Miao, W.; Huang, J.; Chen, H.; Wang, Y. Design and Implementation of High Power Pulse Constant Current Source. IOP Conf. Ser. Earth Environ. Sci. 2021, 632, 042061. [Google Scholar] [CrossRef]
- Li, H.; Bao, H. Design and key parameter analysis of high speed and large current pulse width adjustable pulse constant-current source. In Proceedings of the 2020 3rd International Conference on Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Shenzhen, China, 24–26 April 2020; pp. 868–871. [Google Scholar]
- Singh, R.; Dangwal, N.; Agrawal, L.; Pal, S.; Kamlakar, J. Design of a QCW laser diode driver for space-based laser transmitter. In Lidar Remote Sensing for Environmental Monitoring VII; SPIE: Bellingham, WA, USA, 2006; Volume 6409, pp. 306–311. [Google Scholar]
- Zhenyu, Y.; Liuxia, L.; Qin, Z.; Hua, L.; Fuchang, L. Development of 600 A repetitively pulsed constant current source. High Power Laser Part. Beams 2022, 34, 095017-1. [Google Scholar]
- Zhao, Q.; Li, S.; Cao, R.; Wang, D.; Yuan, J. Design of pulse power supply for high-power semiconductor laser diode arrays. IEEE Access 2019, 7, 92805–92812. [Google Scholar] [CrossRef]
- Zhao, Q.; Cao, R.; Wang, D.; Yuan, J.; Li, S. Pulse power supply for high-power semiconductor laser diode arrays with micro-current pre-start control. IEEE Access 2018, 6, 76682–76688. [Google Scholar] [CrossRef]
- Katz, J.; Margalit, S.; Harder, C.; Wilt, D.; Yariv, A. The intrinsic electrical equivalent circuit of a laser diode. IEEE J. Quantum Electron. 1981, 17, 4–7. [Google Scholar] [CrossRef]
- Kang, S.M.; Leblebici, Y. CMOS Digital Integrated Circuits; MacGraw-Hill: New York, NY, USA, 2003. [Google Scholar]
- Yu, Y.; Kang, Z. Research on Maximum Efficiency Output Control of Voltage Controlled Adjustable Constant Current Source. J. Phys. Conf. Ser. 2022, 2290, 012057. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, Z.; Han, B.; Li, Z.; Lu, Y. A 250 mA high-precision DC current source with improved stability for the Joule balance at NIM. In Proceedings of the 29th Conference on Precision Electromagnetic Measurements (CPEM 2014), Rio de Janeiro, Brazil, 24–29 August 2014; pp. 644–645. [Google Scholar]
- Wang, N.; Li, Z.; Zhang, Z.; He, Q.; Han, B.; Lu, Y. A 10-A high-precision DC current source with stability better than 0.1 ppm/h. IEEE Trans. Instrum. Meas. 2014, 64, 1324–1330. [Google Scholar] [CrossRef]
- Stitt, R.M. Implementation and Applications of Current Sources and Current Receivers; Burr-Brown Application Bulletin; Burr-Brown Corporation: Tucson, AZ, USA, 1990; pp. 1–30. [Google Scholar]
- Green, T. Operational Amplifier Stability Part 4 of 15: Loop-Stability Key Tricks and Rules-of-Thumb; Burr-Brown Corporation: Tucson, AZ, USA, 2006. [Google Scholar]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A.; Powell, J.D. Feedback Control of Dynamic Systems; Prentice Hall: Upper Saddle River, NJ, USA, 2002; Volume 4. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Operating current | 50–300 A |
| Pulse width | 50–300 s |
| Repetition rate | 10–100 Hz |
| Load voltage | <10 V |
| Parameters | Values |
|---|---|
| Drain-to-source breakdown voltage | 55 V |
| Drain-to-source current capability | 360 A |
| Gate-to-source voltage | ±20 V |
| Gate threshold voltage | 2.0-4.0 V |
| Drain-to-source on-resistance | ∼2.4 m |
| Parameters | Values |
|---|---|
| Gain bandwidth | 10 MHz |
| Open-loop gain | 134 dB |
| Differential input impedance | 100 M |
| Open-loop output impedance | 375 |
| Input offset voltage | ±25 V |
| Input offset current | ±5 pA |
| Supply voltage | ±18 V |
| Parameters | Values |
|---|---|
| Voltage range | 0–24 V |
| Current range | 0–62.5 A |
| Rated power | 1500 W |
| Efficiency (max.) | 92% |
| Minimum Value (A) | Maximum Value (A) | Mean Value (A) | Standard Deviation (A) |
|---|---|---|---|
| 299.1 | 300.7 | 299.9 | 0.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Liu, W.; Sun, X.; Chen, J.; Cheng, G.; Chen, X.; Fu, Y.; Liu, P.; Zhang, T. A Load-Adaptive Driving Method for a Quasi-Continuous-Wave Laser Diode. Micromachines 2024, 15, 355. https://doi.org/10.3390/mi15030355
Wu Y, Liu W, Sun X, Chen J, Cheng G, Chen X, Fu Y, Liu P, Zhang T. A Load-Adaptive Driving Method for a Quasi-Continuous-Wave Laser Diode. Micromachines. 2024; 15(3):355. https://doi.org/10.3390/mi15030355
Chicago/Turabian StyleWu, Yajun, Wenqing Liu, Xinhui Sun, Jinxin Chen, Gang Cheng, Xi Chen, Yibin Fu, Pan Liu, and Tianshu Zhang. 2024. "A Load-Adaptive Driving Method for a Quasi-Continuous-Wave Laser Diode" Micromachines 15, no. 3: 355. https://doi.org/10.3390/mi15030355
APA StyleWu, Y., Liu, W., Sun, X., Chen, J., Cheng, G., Chen, X., Fu, Y., Liu, P., & Zhang, T. (2024). A Load-Adaptive Driving Method for a Quasi-Continuous-Wave Laser Diode. Micromachines, 15(3), 355. https://doi.org/10.3390/mi15030355