
Finite Element Study for Mass Sensitivity of Love Surface Acoustic Wave Sensor with Si3N4-SiO2 Double-Covered Waveguiding Layer


Abstract
:1. Introduction
2. Device Design and Simulation Methods
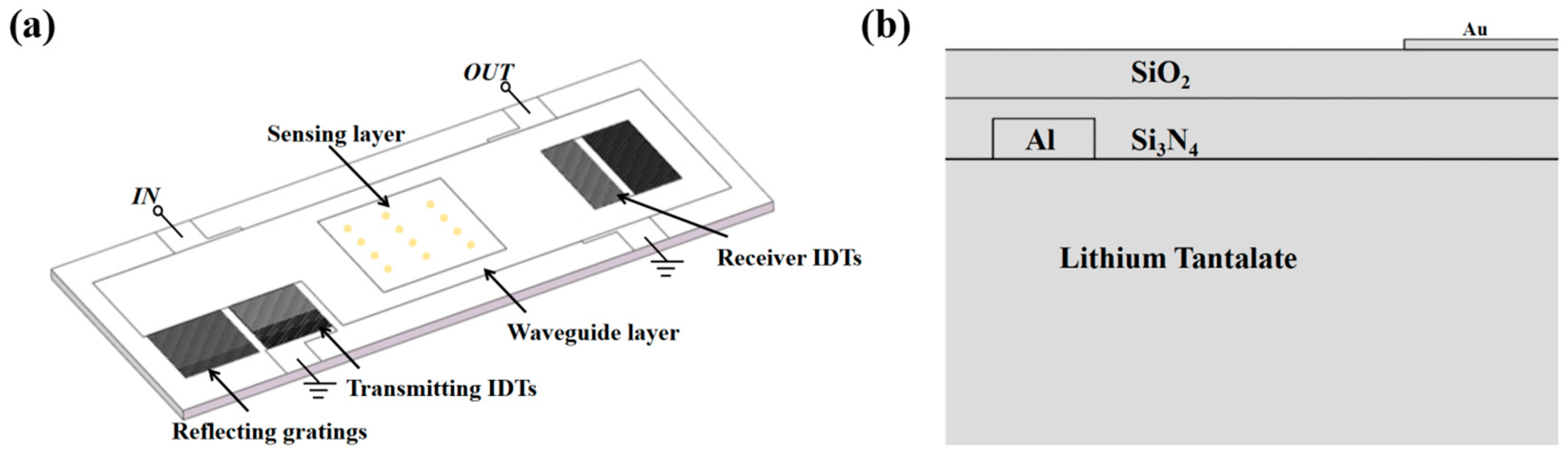
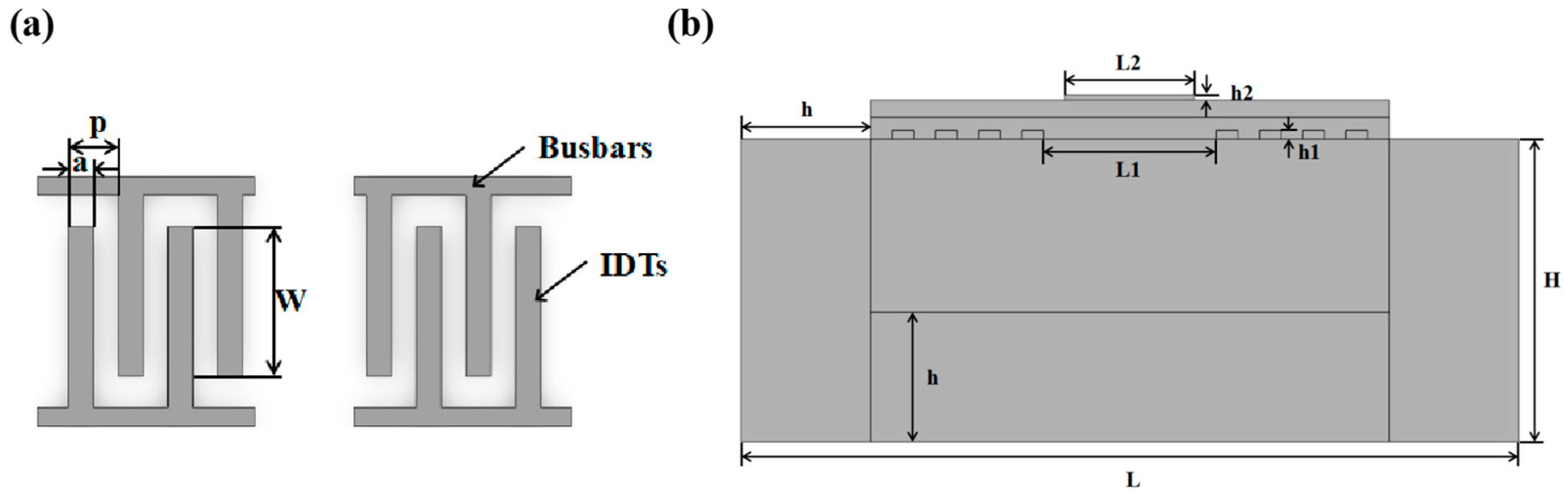
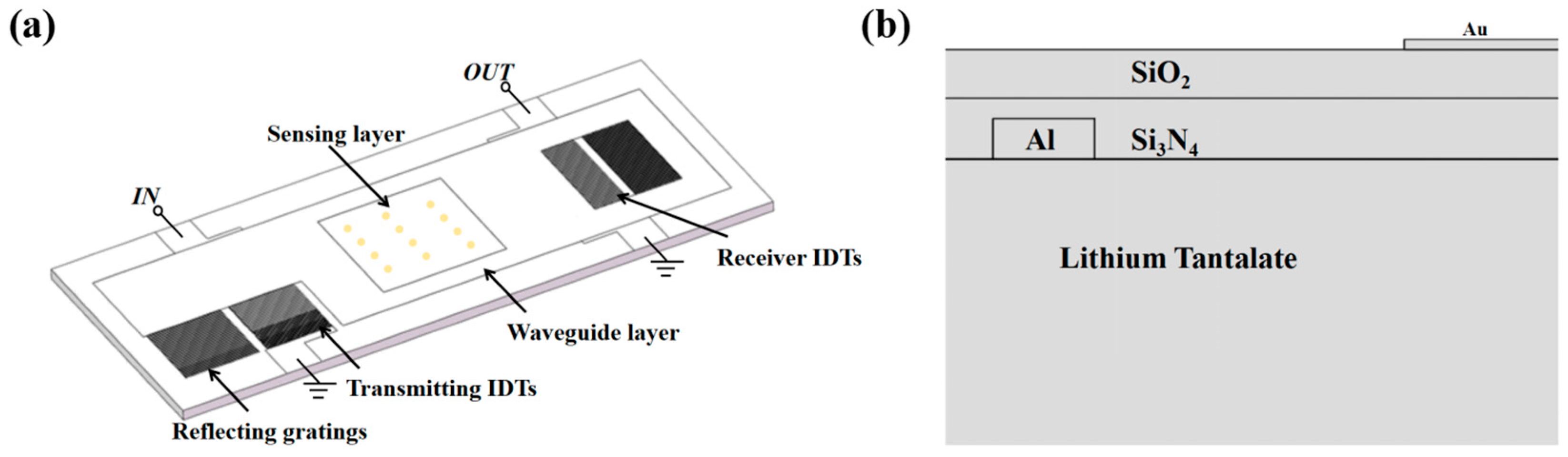
2.1. Device Design and Working Principle
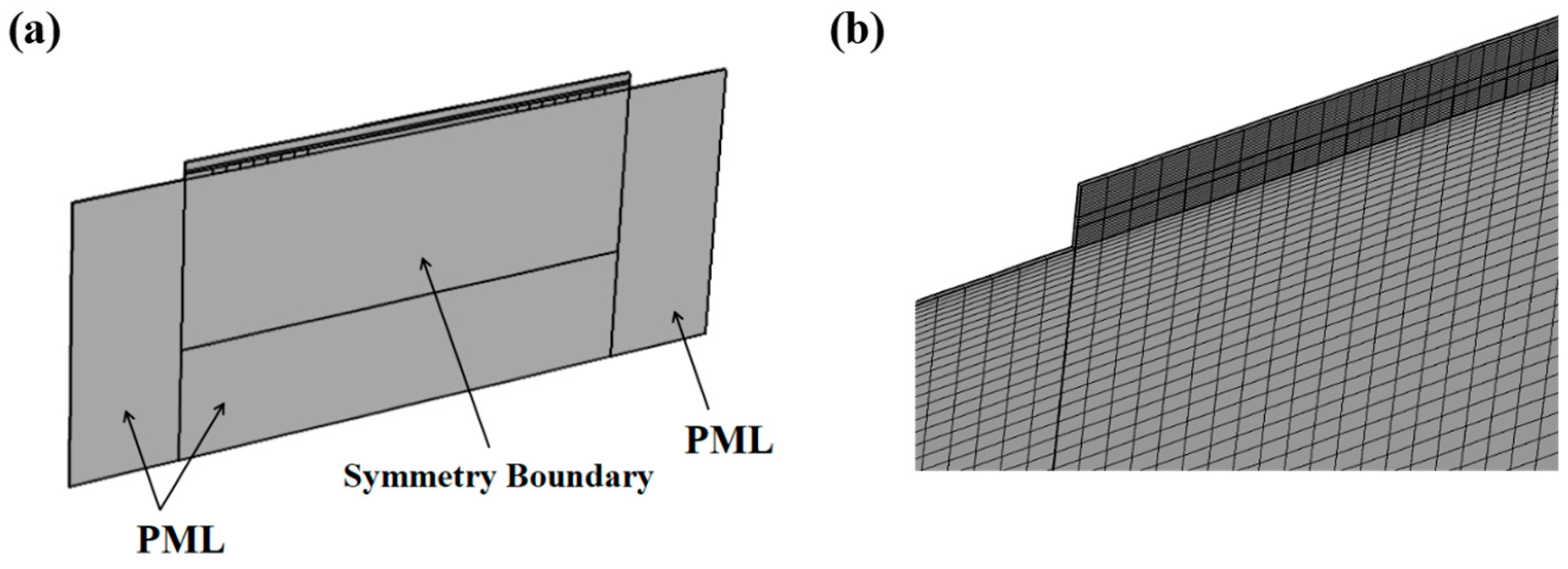
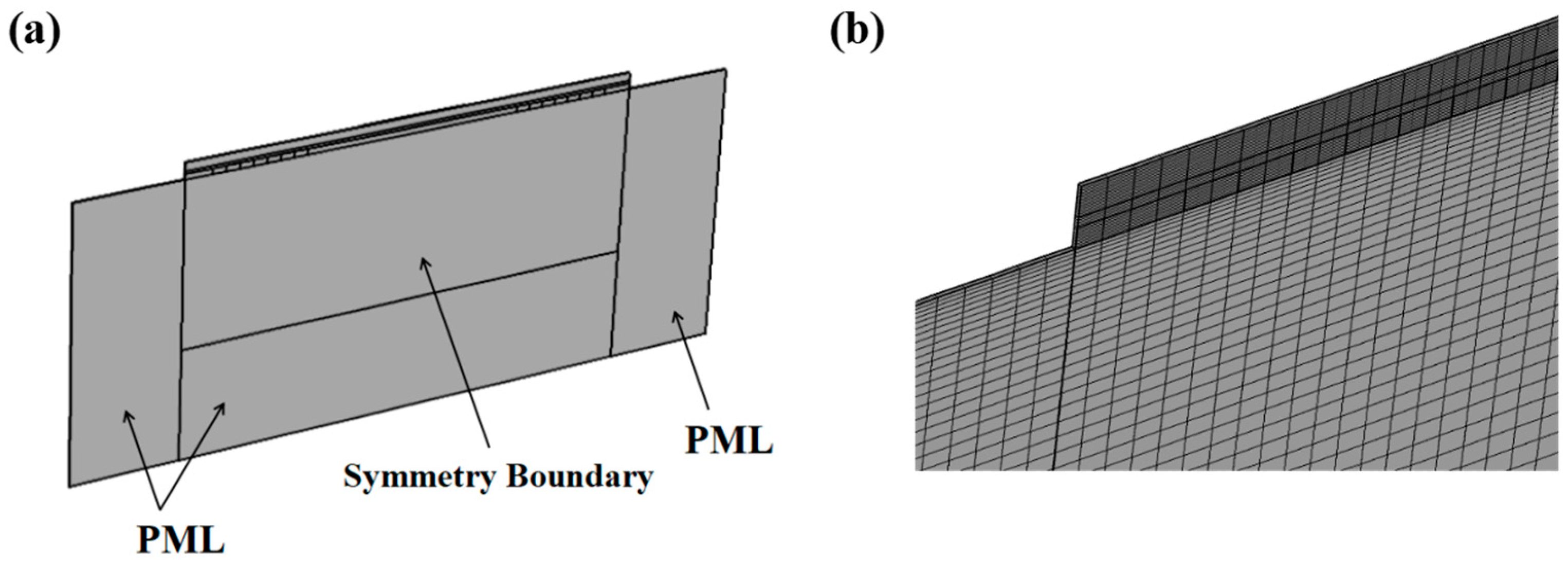
2.2. Simulation Methods and Modelling
3. Results and Discussion
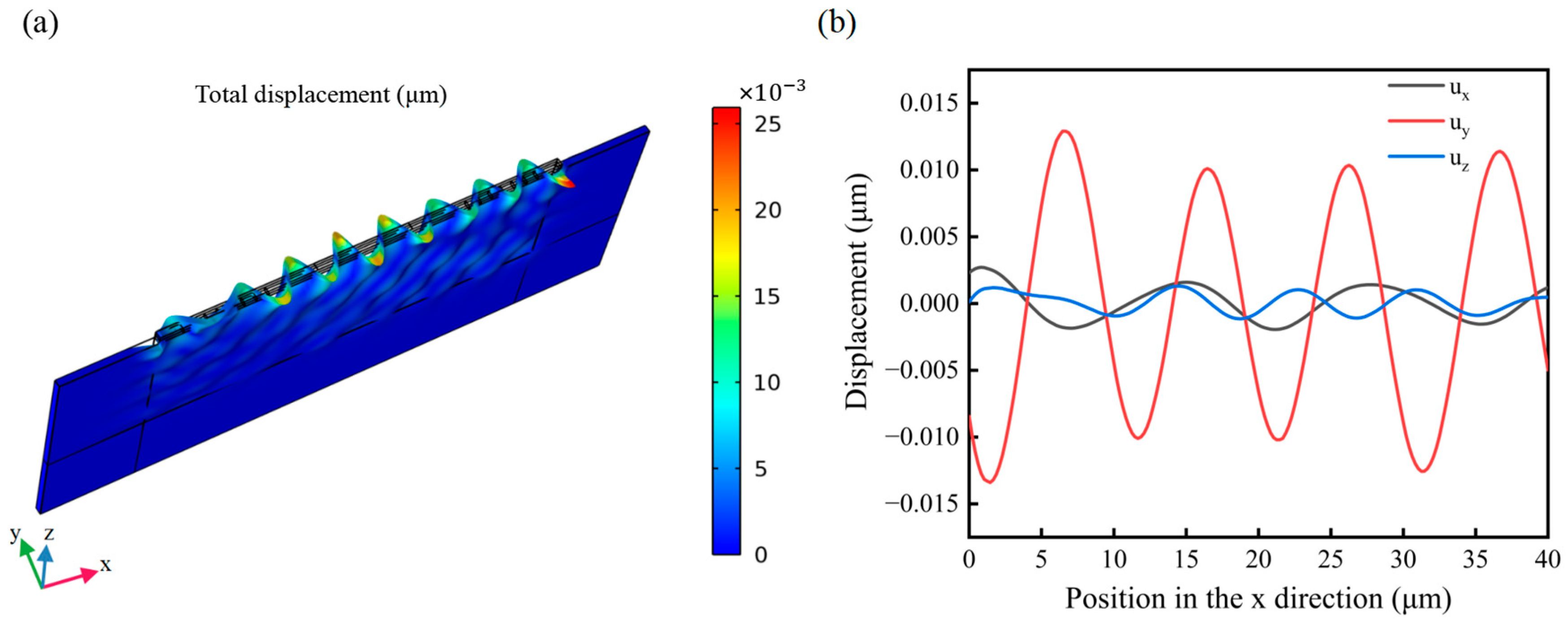
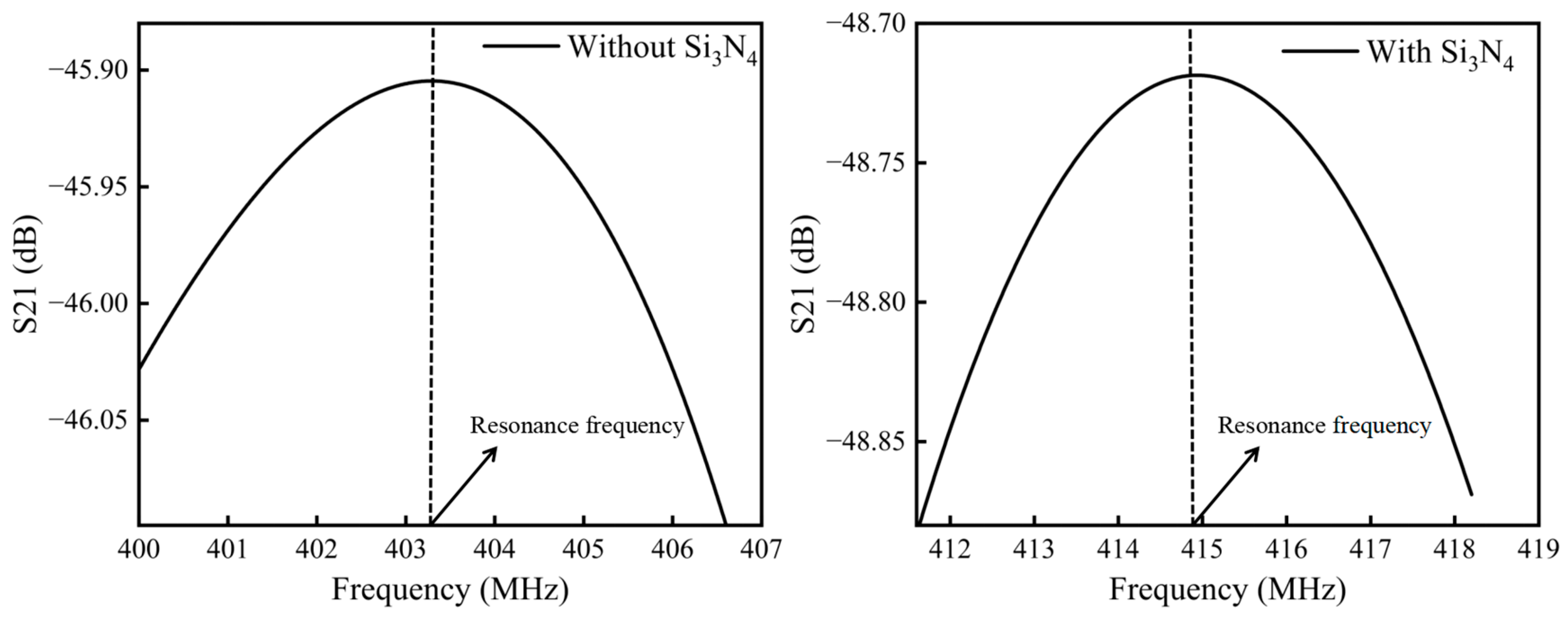
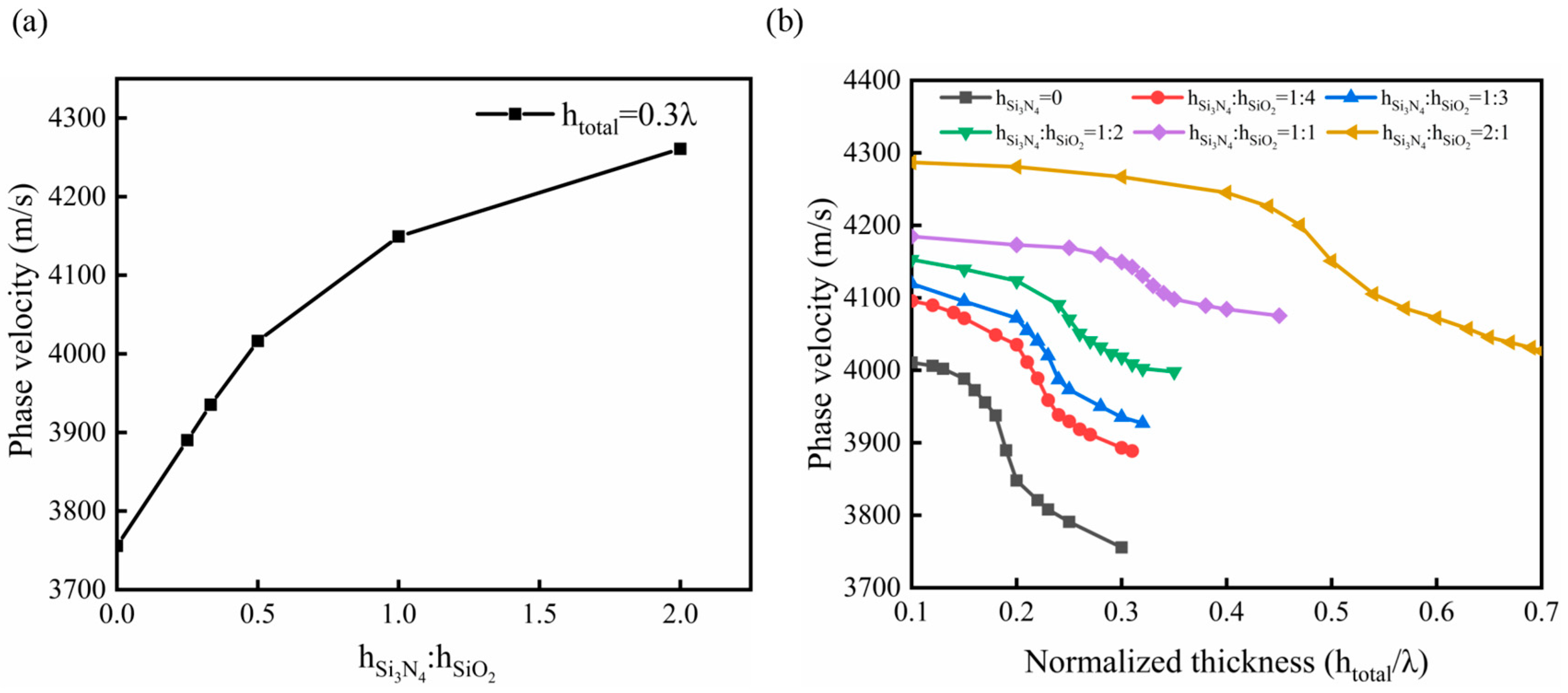
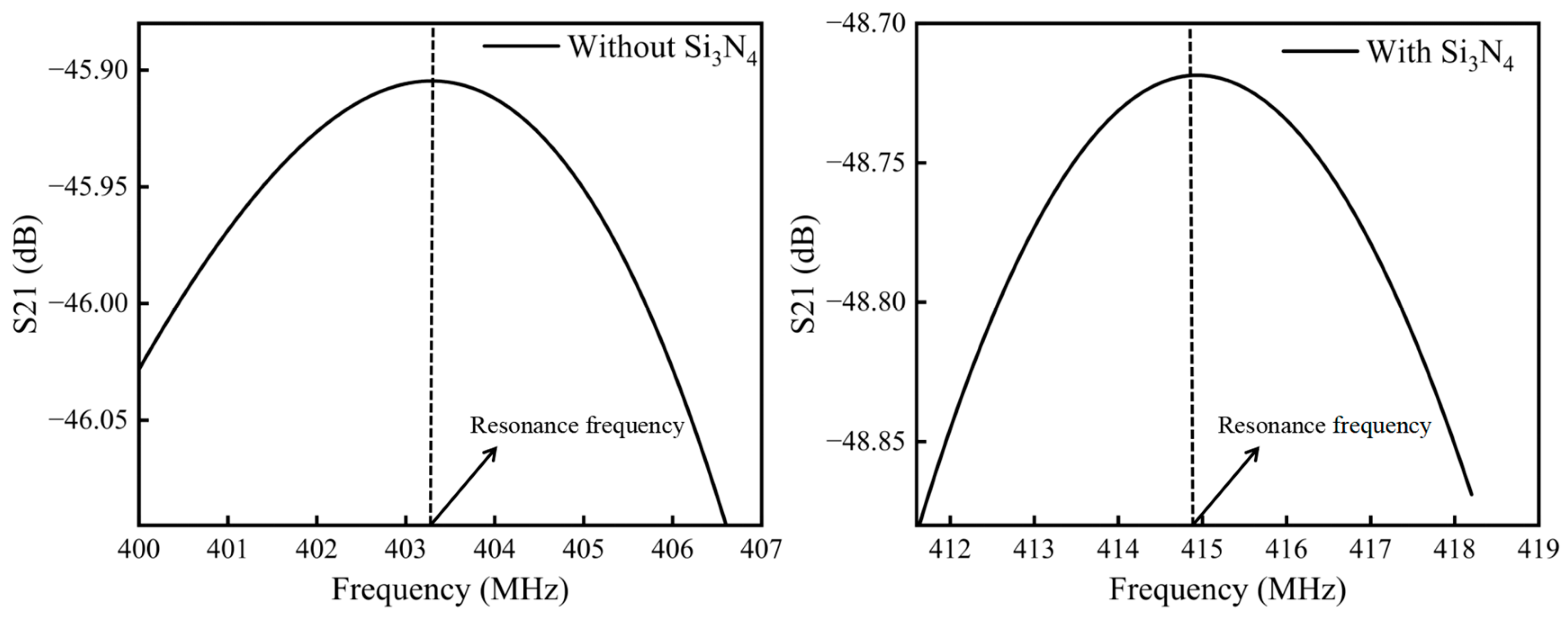
3.1. Simulation Results of Surface Displacements and Phase Velocity
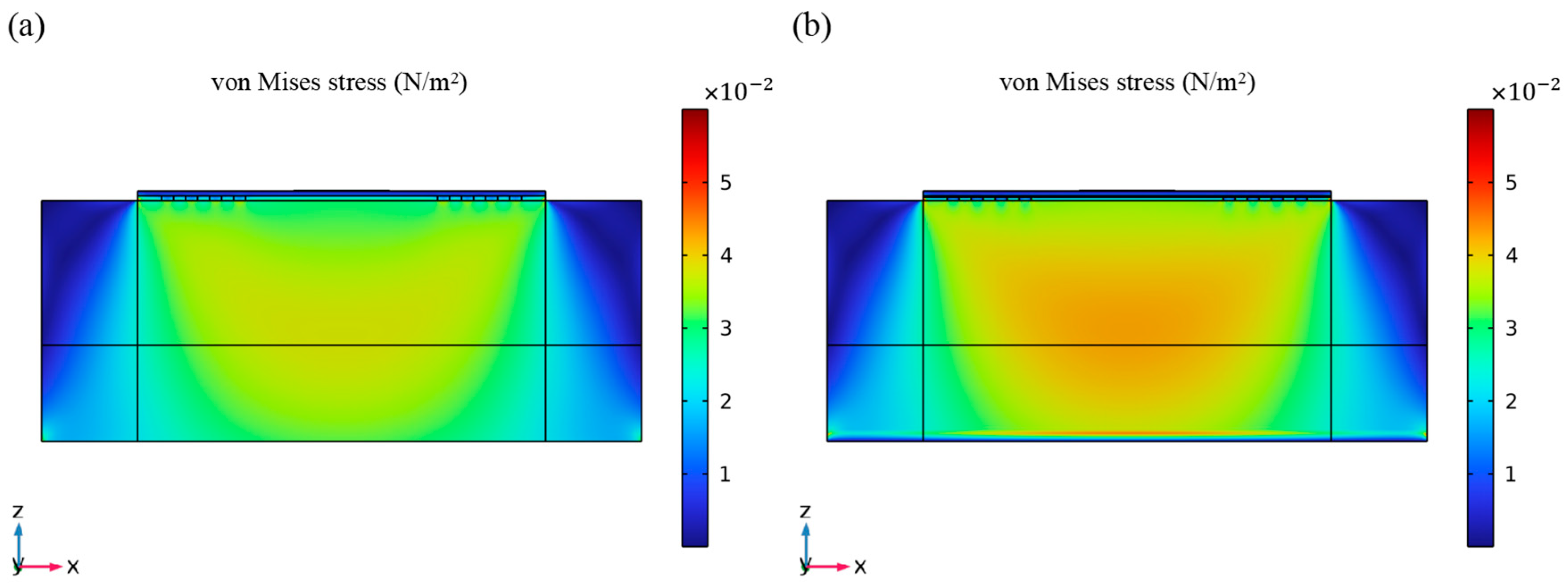
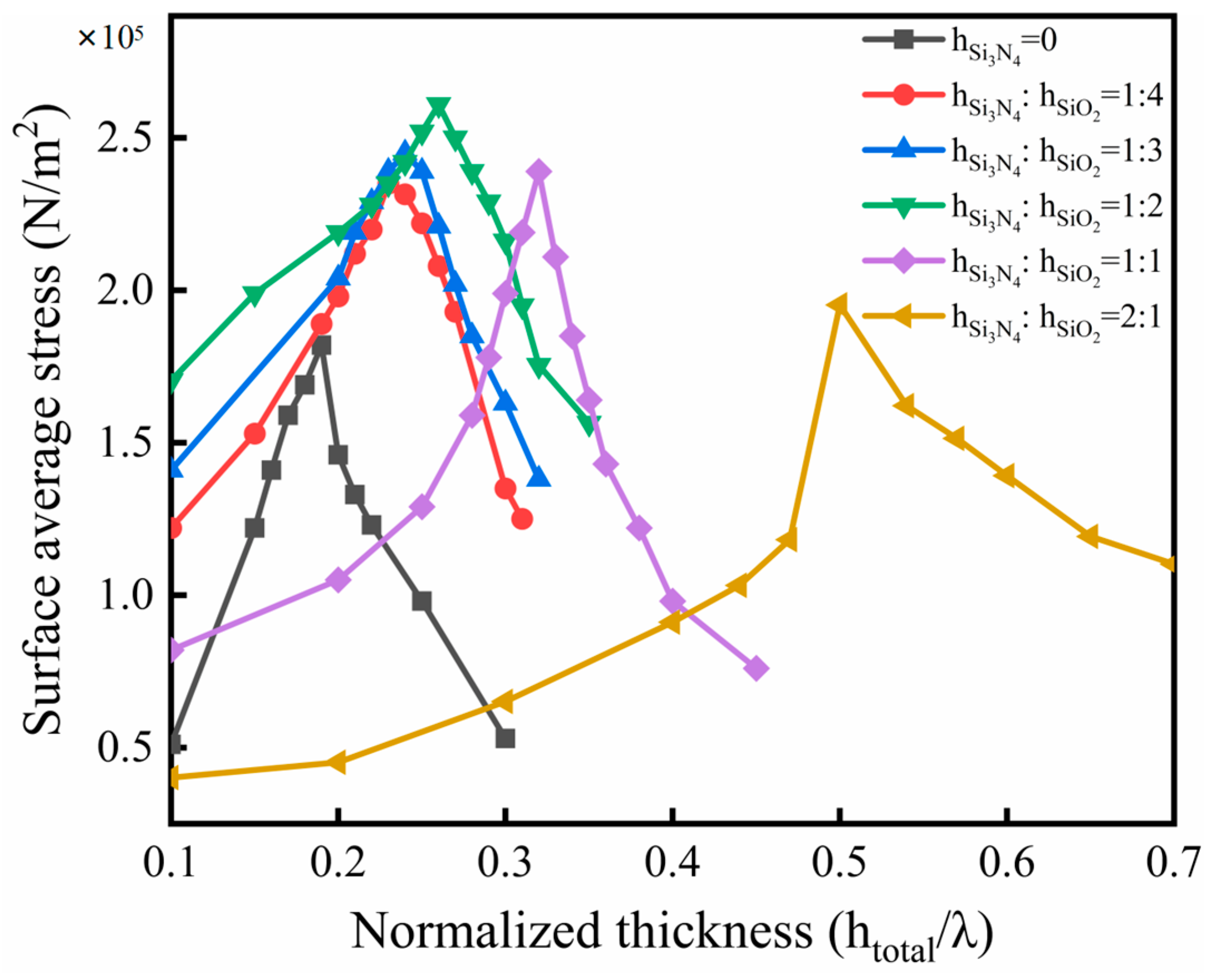
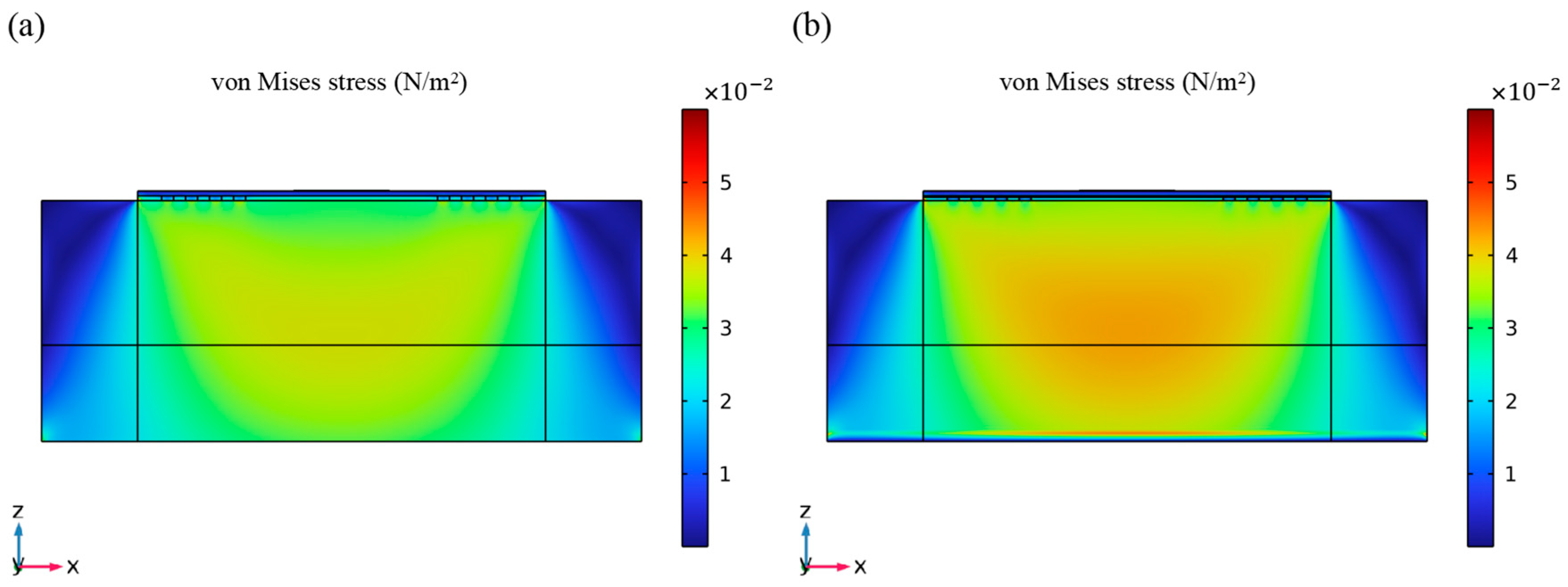
3.2. Analysis of Surface Average Stress
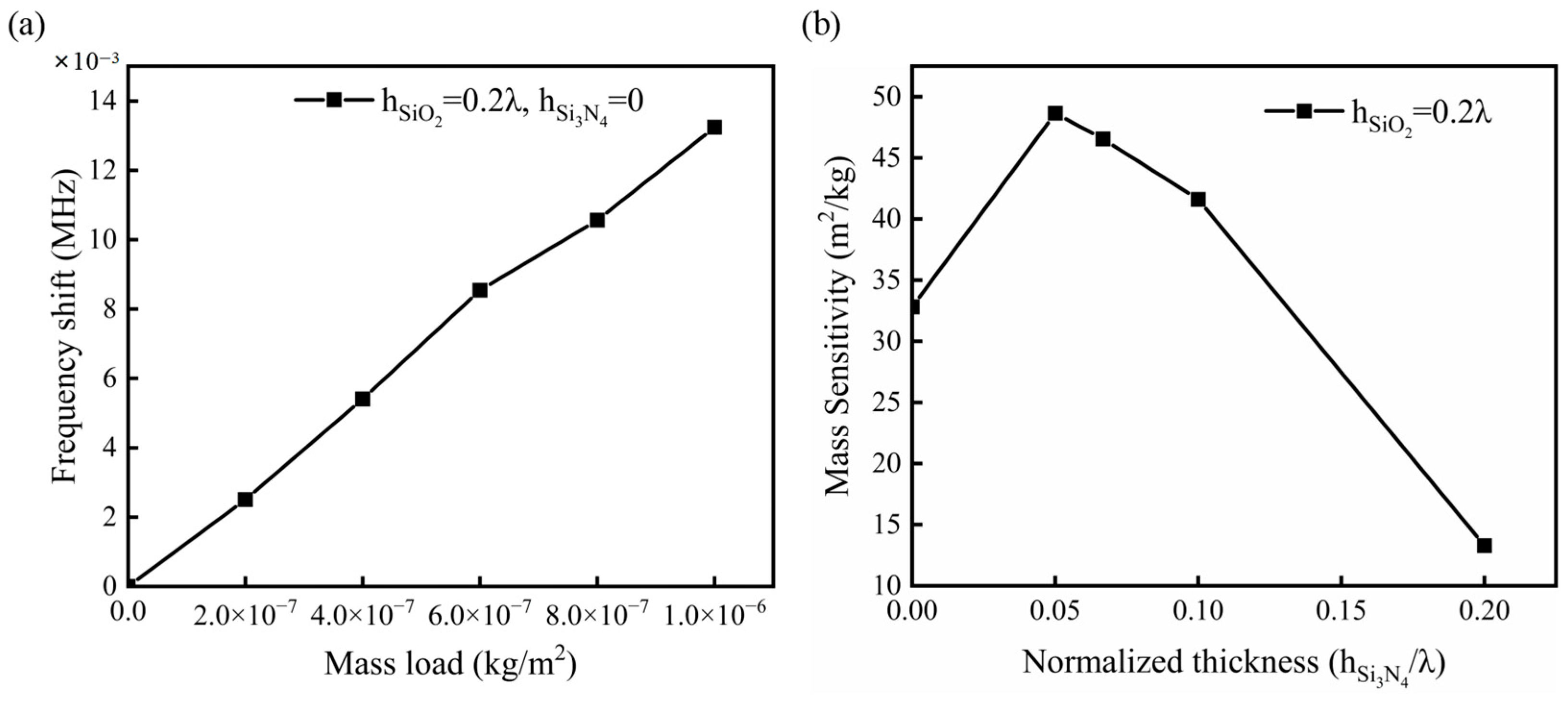
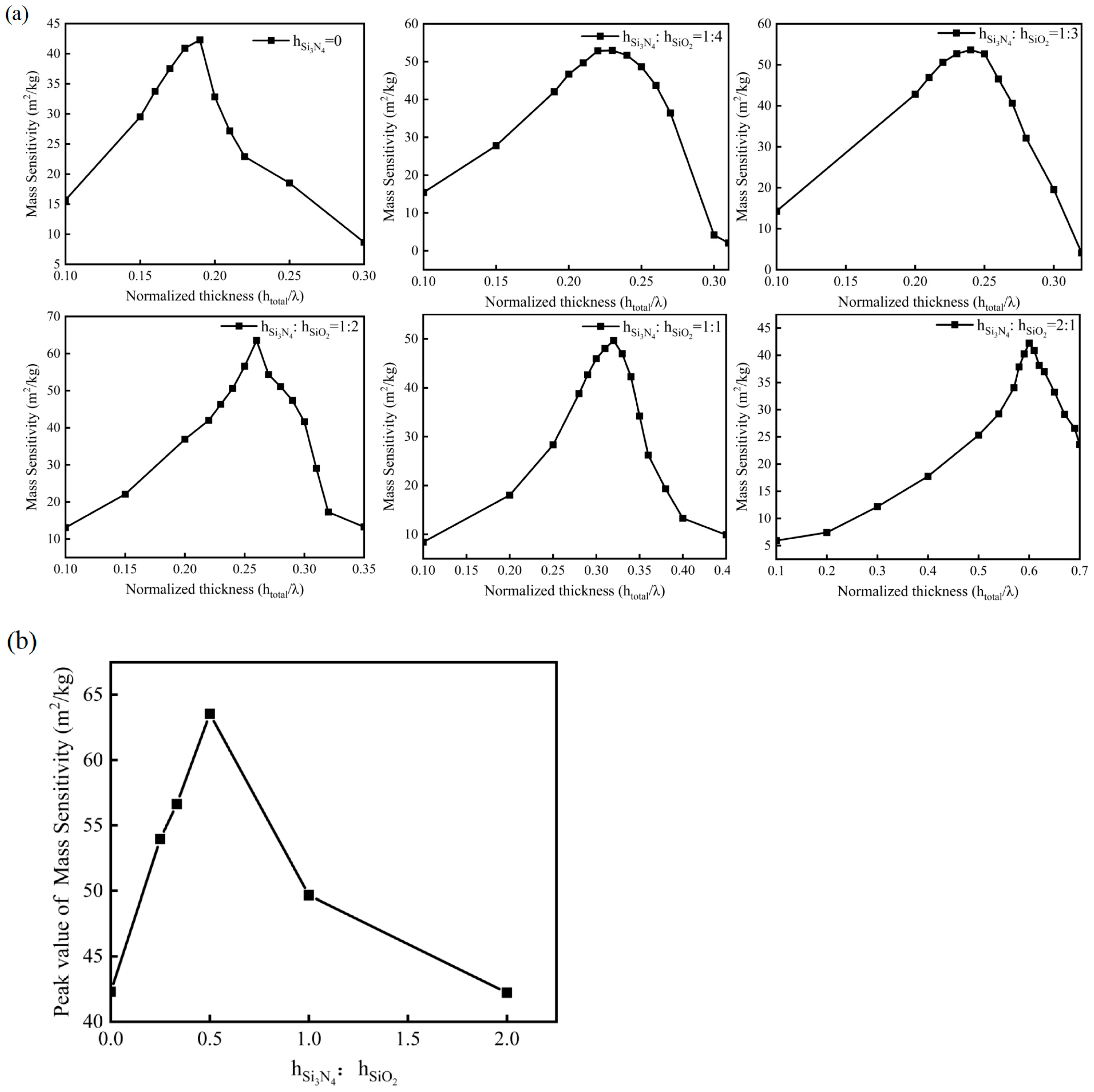
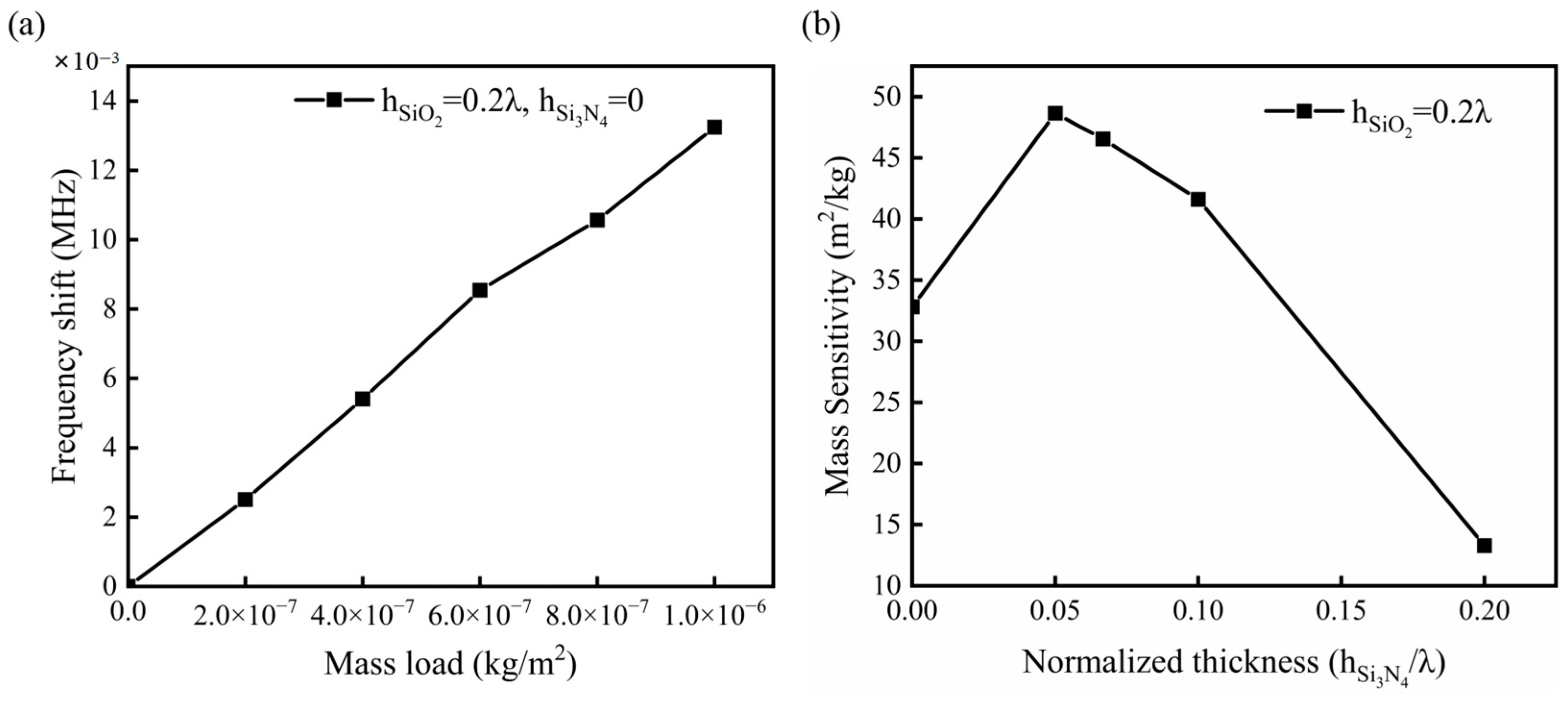
3.3. Analysis of Mass Sensitivity
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shu, L.; Wang, X.; Li, L.; Yan, D.; Peng, L.; Fan, L.; Wu, W. The investigation of integrated SAW strain sensor based on AlN/TC4 structure. Sens. Actuators A Phys. 2019, 293, 14–20. [Google Scholar] [CrossRef]
- Wang, T.; Tang, Z.; Lin, H.; Zhan, K.; Wan, J.; Wu, S.; Gu, Y.; Luo, W.; Zhang, W. A Low Temperature Drifting Acoustic Wave Pressure Sensor with an Integrated Vacuum Cavity for Absolute Pressure Sensing. Sensors 2020, 20, 1788. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Huang, Y.; Liu, X.; Liang, Y. Surface acoustic wave acceleration sensor with high sensitivity incorporating ST-X quartz cantilever beam. Smart Mater. Struct. 2015, 24, 015015. [Google Scholar] [CrossRef]
- Lu, L.; Liu, J.; Li, Q.; Yi, Z.; Liu, J.; Wang, X.; Chen, X.; Yang, B. High Performance SnO2/MoS2-Based Surface Acoustic Wave Humidity Sensor with Good Linearity. IEEE Sens. J. 2019, 19, 11027–11033. [Google Scholar] [CrossRef]
- Scholl, G.; Schmidt, F.; Wolff, U. Surface Acoustic Wave Devices for Sensor Applications. Phys. Status Solidi A 2001, 185, 47–58. [Google Scholar] [CrossRef]
- Peng, T.; Zhou, M.; Yuan, S.; Fan, C.; Jiang, B. Numerical investigation of particle deflection in tilted-angle standing surface acoustic wave microfluidic devices. Appl. Math. Model. 2022, 101, 517–532. [Google Scholar] [CrossRef]
- Zhgoon, S.A.; Shvetsov, A.S.; Sakharov, S.A.; Elmazria, O. High-Temperature SAW Resonator Sensors: Electrode Design Specifics. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2018, 65, 657–664. [Google Scholar] [CrossRef]
- Kwon, Y.; Roh, Y. Development of SH-SAW sensors for underwater measurement. Ultrasonics 2004, 42, 409–411. [Google Scholar] [CrossRef]
- Trivedi, S.; Nemade, H.B. Coupled resonance in SH-SAW resonator with S1813 micro-ridges for high mass sensitivity biosensing applications. Sens. Actuators B Chem. 2018, 273, 288–297. [Google Scholar] [CrossRef]
- Li, Y.; Yang, J.; Jiang, B.; Cao, L.; Shen, X.; Shao, M. Finite element simulation for sensitivity measurement of a shear horizontal surface acoustic wave micro pressure sensor with a groove structure. Meas. Sci. Technol. 2021, 32, 015103. [Google Scholar] [CrossRef]
- Mandal, D.; Banerjee, S. Surface acoustic wave (SAW) sensors: Physics, materials, and applications. Sensors 2022, 22, 820. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Kim, K.-B.; Kim, Y.-I. Love wave SAW biosensors for detection of antigen-antibody binding and comparison with SPR biosensor. Food Sci. Biotechnol. 2011, 20, 1413–1418. [Google Scholar] [CrossRef]
- Zhang, F.; Li, S.; Cao, K.; Wang, P.; Su, Y.; Zhu, X.; Wan, Y. A Microfluidic Love-Wave Biosensing Device for PSA Detection Based on an Aptamer Beacon Probe. Sensors 2015, 15, 13839–13850. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Jones, Y.; Hossenlopp, J.; Cernosek, R.; Josse, F. Analysis of Liquid-Phase Chemical Detection Using Guided Shear Horizontal-Surface Acoustic Wave Sensors. Anal. Chem. 2005, 77, 4595–4603. [Google Scholar] [CrossRef]
- Li, S.; Sankaranarayanan, S.K.R.S.; Fan, C.; Su, Y.; Bhethanabotla, V.R. Achieving Lower Insertion Loss and Higher Sensitivity in a SAW Biosensor via Optimization of Waveguide and Microcavity Structures. IEEE Sens. J. 2017, 17, 1608–1616. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, J.; Zou, L.; Zou, Y.; Lang, L.; Gao, F.; Hu, N.; Wang, P. A novel sensitive cell-based Love Wave biosensor for marine toxin detection. Biosens. Bioelectron. 2016, 77, 573–579. [Google Scholar] [CrossRef]
- Wang, T.; Green, R.; Guldiken, R.; Wang, J.; Mohapatra, S.; Mohapatra, S.S. Finite Element Analysis for Surface Acoustic Wave Device Characteristic Properties and Sensitivity. Sensors 2019, 19, 1749. [Google Scholar] [CrossRef]
- Lo, X.-C.; Li, J.-Y.; Lee, M.-T.; Yao, D.-J. Frequency Shift of a SH-SAW Biosensor with Glutaraldehyde and 3-Aminopropyltriethoxysilane Functionalized Films for Detection of Epidermal Growth Factor. Biosensors 2020, 10, 92. [Google Scholar] [CrossRef]
- Wang, C.; Wang, C.; Jin, D.; Yu, Y.; Yang, F.; Zhang, Y.; Yao, Q.; Zhang, G.-J. AuNP-Amplified Surface Acoustic Wave Sensor for the Quantification of Exosomes. ACS Sens. 2020, 5, 362–369. [Google Scholar] [CrossRef]
- Li, S.; Wan, Y.; Su, Y.; Fan, C.; Bhethanabotla, V.R. Gold nanoparticle-based low limit of detection Love wave biosensor for carcinoembryonic antigens. Biosens. Bioelectron. 2017, 95, 48–54. [Google Scholar] [CrossRef]
- Tang, P.; Wang, Y.; Huo, J.; Lin, X. Love Wave Sensor for Prostate-Specific Membrane Antigen Detection Based on Hydrophilic Molecularly-Imprinted Polymer. Polymers 2018, 10, 563. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Tan, C.Y.; Tan, S.Y.; Wong, M.S.F.; Chen, Y.F.; Zhang, L.; Yao, K.; Gan, S.K.E.; Verma, C.; Tan, Y.-J. SAW sensor for Influenza A virus detection enabled with efficient surface functionalization. Sens. Actuators B Chem. 2015, 209, 78–84. [Google Scholar] [CrossRef]
- Shen, J.; Fu, S.; Su, R.; Xu, H.; Wang, W.; Lu, Z.; Feng, Q.; Zeng, F.; Song, C.; Pan, F. Structure with thin SiOx/SiNx bilayer and Al electrodes for high-frequency, large-coupling, and low-cost surface acoustic wave devices. Ultrasonics 2021, 115, 106460. [Google Scholar] [CrossRef] [PubMed]
- Richardson, M.; Sankaranarayanan, S.K.R.S.; Bhethanabotla, V.R. Low Insertion Loss and Highly Sensitive SH-SAW Sensors Based on 36° YX LiTaO3 Through the Incorporation of Filled Microcavities. IEEE Sens. J. 2015, 15, 787–796. [Google Scholar] [CrossRef]
- Länge, K.; Grimm, S.; Rapp, M. Chemical modification of parylene C coatings for SAW biosensors. Sens. Actuators B Chem. 2007, 125, 441–446. [Google Scholar] [CrossRef]
- Li, S.; Wan, Y.; Fan, C.; Su, Y. Theoretical Study of Monolayer and Double-Layer Waveguide Love Wave Sensors for Achieving High Sensitivity. Sensors 2017, 17, 653. [Google Scholar] [CrossRef]
- He, X.L.; Li, D.J.; Zhou, J.; Wang, W.B.; Xuan, W.P.; Dong, S.R.; Jin, H.; Luo, J.K. High sensitivity humidity sensors using flexible surface acoustic wave devices made on nanocrystalline ZnO/polyimide substrates. J. Mater. Chem. C 2013, 1, 6210–6215. [Google Scholar] [CrossRef]
- Wang, Y.; Hashimoto, K.-Y.; Omori, T.; Yamaguchi, M. A Full-Wave Analysis of Surface Acoustic Waves Propagating on a SiO2 Overlay/Metal Grating/Rotated Y-Cut X-Propagating LiNbO3 Substrate Structure. Jpn. J. Appl. Phys. 2009, 48, 07GG06. [Google Scholar] [CrossRef]
- Li, Y.; Shao, M.; Jiang, B.; Cao, L. Surface acoustic wave pressure sensor and its matched antenna design. Meas. Control 2019, 52, 947–954. [Google Scholar] [CrossRef]
- Isobe, A.; Hikita, M.; Asai, K.; Sumioka, A. A miniature high-Q grating-mode-type SAW resonator and a wide-band 1-GHz SAW-VCO for mobile communications. In Proceedings of the 2000 IEEE MTT-S International Microwave Symposium Digest, (Cat. No.00CH37017), Boston, MA, USA, 11–16 June 2000; Volume 912, pp. 917–920. [Google Scholar]
- Brugger, M.S.; Schnitzler, L.G.; Nieberle, T.; Wixforth, A.; Westerhausen, C. Shear-horizontal surface acoustic wave sensor for non-invasive monitoring of dynamic cell spreading and attachment in wound healing assays. Biosens. Bioelectron. 2021, 173, 112807. [Google Scholar] [CrossRef]
- Memon, M.M.; Pan, S.; Wan, J.; Wang, T.; Peng, B.; Zhang, W. Sensitivity Enhancement of SAW Pressure Sensor Based on the Crystalline Direction. IEEE Sens. J. 2022, 22, 9329–9335. [Google Scholar] [CrossRef]
- Trivedi, S.; Nemade, H.B. Finite element simulation of a highly sensitive SH-SAW delay line sensor with SiO2 micro-ridges. Microsyst. Technol. 2018, 24, 3537–3547. [Google Scholar] [CrossRef]
- Lan, T.; Xi, X.; Chu, Q.; Zhao, L.; Chen, A.; Lu, J.J.; Wang, F.; Zhang, W. A preliminary origin-tracking study of different densities urinary exosomes. Electrophoresis 2018, 39, 2316–2320. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Piezoelectric Materials | Wave Velocity (m/s) | Electromechanical Coupling Coefficient K2 (%) | Temperature Coefficient of Frequency (10−6/°C) |
|---|---|---|---|
| ST-90° Quartz | 5050 | 0.1 | 0 |
| 36°Y-X LiTaO3 | 4200 | 5 | −32 |
| 36°Y-X LiNbO3 | 4690 | 10.5 | −70 |
| 128°Y-X LiNbO3 | 3980 | 5.5 | −74 |
| Waveguiding Materials | SiO2 | Si3N4 |
|---|---|---|
| Density (kg/m3) | 2200 | 3100 |
| Phase velocity (m/s) | 2850 | 6040 |
| Relative permittivity | 4.2 | 9.7 |
| Young’s modulus (Pa) | 70 × 109 | 250 × 109 |
| Poisson’s ratio | 0.17 | 0.23 |
| Substrate height, H | 5 λ | Sensing layer length, L2 | 2 λ |
| Substrate length, L | 10.5 λ | IDT height, h1 | 0.1 λ |
| Substrate width, T | 0.2 μm | Sensing layer height, h2 | 0.1 μm |
| PML width, h | 2 λ | Electrode width, a | 0.25 λ |
| Delay path length, L1 | 2.5 λ | Finger pitch, p | 0.5 λ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Zhou, M.; Huang, L.; Jiang, B. Finite Element Study for Mass Sensitivity of Love Surface Acoustic Wave Sensor with Si3N4-SiO2 Double-Covered Waveguiding Layer. Micromachines 2023, 14, 1696. https://doi.org/10.3390/mi14091696
Li L, Zhou M, Huang L, Jiang B. Finite Element Study for Mass Sensitivity of Love Surface Acoustic Wave Sensor with Si3N4-SiO2 Double-Covered Waveguiding Layer. Micromachines. 2023; 14(9):1696. https://doi.org/10.3390/mi14091696
Chicago/Turabian StyleLi, Luming, Mingyong Zhou, Lei Huang, and Bingyan Jiang. 2023. "Finite Element Study for Mass Sensitivity of Love Surface Acoustic Wave Sensor with Si3N4-SiO2 Double-Covered Waveguiding Layer" Micromachines 14, no. 9: 1696. https://doi.org/10.3390/mi14091696
APA StyleLi, L., Zhou, M., Huang, L., & Jiang, B. (2023). Finite Element Study for Mass Sensitivity of Love Surface Acoustic Wave Sensor with Si3N4-SiO2 Double-Covered Waveguiding Layer. Micromachines, 14(9), 1696. https://doi.org/10.3390/mi14091696