
Design of a Double-Layer Electrothermal MEMS Safety and Arming Device with a Bistable Mechanism



Abstract
:1. Introduction
2. Modeling
2.1. Fundamental Mechanism of the S&A Device
2.2. Driving Principle of the S&A Device
3. Fabrication
4. Tests and Discussions
4.1. Test of the Actuators’ Performance
4.2. Test of the Operation Process with Constant-Voltage Driving
4.3. Test of the Operation Process with Capacitor–Discharge Driving
5. Conclusions
- (1)
- In this paper, we propose the design and characterization of a double-layer electrothermal MEMS S&A device with a bistable mechanism. Four groups of the bistable mechanism in the S&A device can effectively improve the safety and reliability of the weapon system. Each bistable mechanism drives a semi-circular barrier and a pawl independently through two V-shape electrothermal actuators and controls their engagement through a specific operation process. The four groups of the bistable mechanism are axisymmetrically placed in two layers, two mechanisms for each layer, to constitute a double-layer barrier structure in the center of the S&A device. When a voltage is applied on the actuators, the barriers and the pawls can be driven to an arming position. The test results of the actuators’ static performance show that the applied voltage is at least 12 V to drive the S&A device. The test results of the dynamic performance show that the actuators gain a faster response with the increase of the applied voltage.
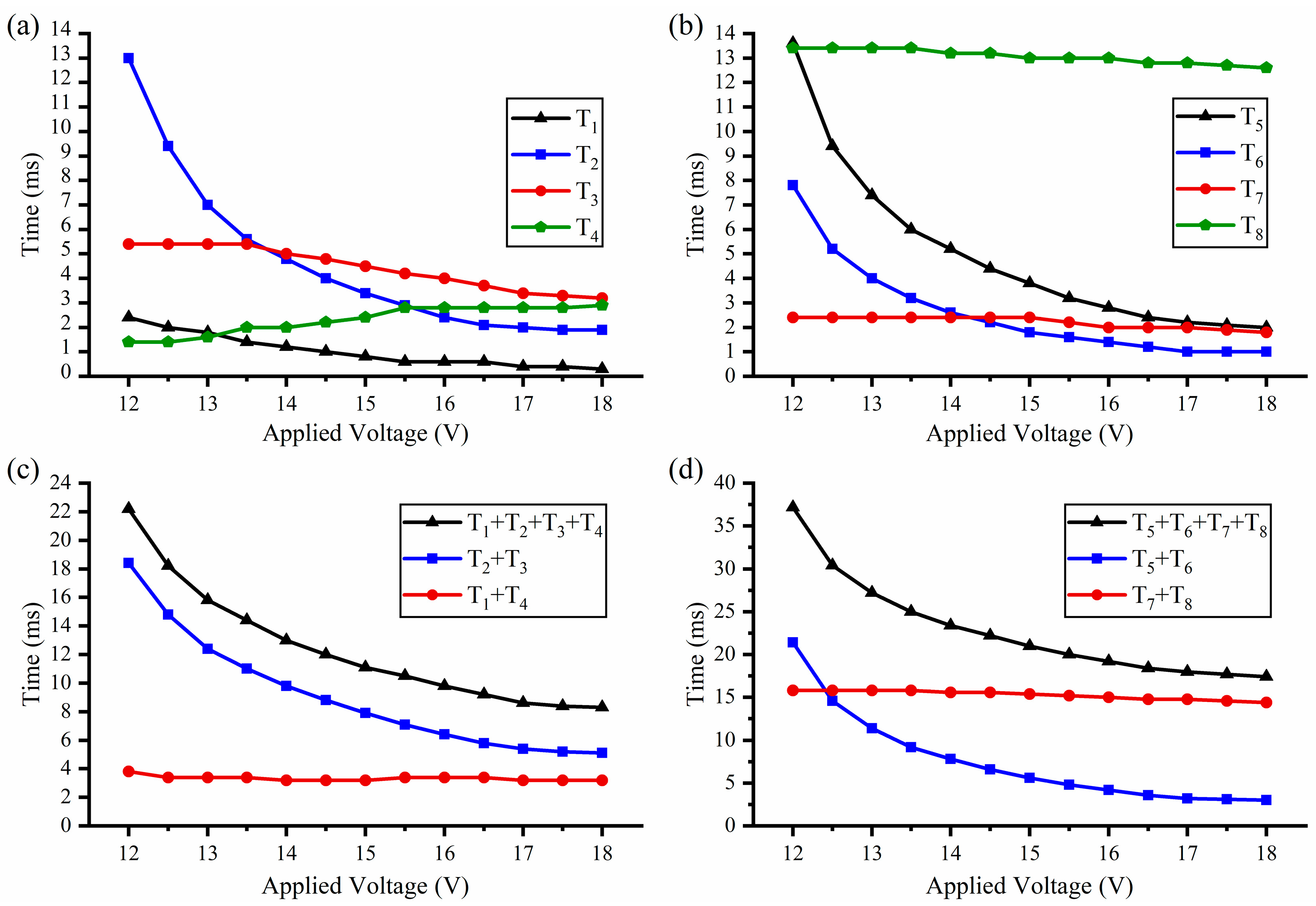
- (2)
- Only according to a specific operation process can the S&A device switch the conditions between the safety and the arming. The arming to safety process is the inverse of the safety to arming process, and all of them have four steps. Due to the faster response, the total time of the two processes decreases with the increase of applied voltage, but the two processes are hardly faster when the applied voltage is more than 18 V. When the applied voltage is set at 17 V, the S&A device can use minimum electric energy to switch the condition to the arming within 8.6 ms or the safety within 18 ms. Besides the constant-voltage driving, the S&A device can also switch the condition through the discharge of a capacitor of 2000 μF. When the charging voltage is set at 17 V, the S&A device can switch the condition to the arming within 9.6 ms or the safety within 20.8 ms. Thus, the test results show that the S&A device can use constant-voltage driving or the capacitor–discharge driving to drive the double-layer barrier to the safety or the arming position and keep it on the position passively by the bistable mechanism.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, M.; Hu, T. Research status and development trend of MEMS S&A devices: A review. Def. Technol. 2021, 17, 450–456. [Google Scholar]
- Rehan, M.; Mansoor, M. Application of MEMS in safety and arming devices: An overview. Microsyst. Technol. 2021, 27, 3599–3610. [Google Scholar] [CrossRef]
- Qin, Y.; Shen, Y.; Zou, X.; Hao, Y. Test and improvement of a fuze MEMS setback arming device based on the EDM Process. Micromachines 2022, 13, 292. [Google Scholar] [CrossRef] [PubMed]
- Robinson, C.H.; Wood, R.H.; Hoang, T.Q. Miniature MEMS-Based Electromechanical Safety and Arming Device. U.S. Patent Number 6964231, 15 November 2005. [Google Scholar]
- Jeong, J.; Eom, J.; Lee, S.; Lim, D.; Jang, Y.; Seo, K.; Choi, S.; Lee, C.; Oh, J. Miniature mechanical safety and arming device with runaway escapement arming delay mechanism for artillery fuze. Sens. Actuators A 2018, 279, 518–524. [Google Scholar] [CrossRef]
- Seok, J.; Jeong, J.; Eom, J.; Lee, S.; Lee, C.; Ryu, S.; Oh, J. Ball driven type MEMS SAD for artillery fuse. J. Micromech. Microeng. 2018, 27, 015032. [Google Scholar] [CrossRef]
- Lei, S.; Cao, Y.; Nie, W.; Xi, Z.; Yao, J.; Zhu, H.; Lu, H. Research on Mechanical Responses of a Novel Inertially Driven MEMS Safety and Arming Device Under Dual-Environment Inertial Loads. IEEE Sens. J. 2022, 22, 7645–7655. [Google Scholar] [CrossRef]
- Wang, D.; Lou, W.; Feng, Y.; Zhang, X. Design of High-Reliability Micro Safety and Arming Devices for a Small Caliber Projectile. Micromachines 2017, 8, 234. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hu, T.; Fang, K.; Zhang, Z.; Jiang, X.; Zhao, Y. The Research on MEMS S&A Device with Metal-Silicon Composite Structure. J. Microelectromech. Syst. 2019, 28, 1088–1099. [Google Scholar]
- Hu, T.; Zhao, Y.; Li, X.; Zhao, Y.; Bai, Y. Integration design of MEMS electro-thermal safety-and-arming devices. Microsyst. Technol. 2017, 23, 953–958. [Google Scholar] [CrossRef]
- Maurer, W.H.; Soto, G.H.; Hollingsworth, D.R. Method for Utilizing a MEMS Safe Arm Device for Microdetonation. U.S. Patent Number 7007606, 7 March 2006. [Google Scholar]
- Maurer, W.H.; Soto, G.H.; Hollingsworth, D.R. MEMS Safe Arm Device for Microdetonation. U.S. Patent Number 7040234, 9 May 2006. [Google Scholar]
- Xi, Z.; Nie, W.; Li, Q. A MEMS interrupter mechanism for fuze safety & arming device. In Proceedings of the International Conference on Mechanical Engineering & Mechanics, Beijing, China, 21–23 October 2009. [Google Scholar]
- Sun, Y.; Lou, W.; Feng, H.; Zhao, Y. Study on characteristics of electromagnetic coil used in MEMS safety and arming device. Micromachines 2020, 11, 749. [Google Scholar] [CrossRef] [PubMed]
- Pezous, H.; Rossi, C.; Sanchez, M.; Mathieu, F.; Dollat, X.; Charlot, S.; Salvagnac, L.; Conedera, V. Integration of a MEMS based safe arm and fire device. Sens. Actuators A 2010, 159, 157–167. [Google Scholar] [CrossRef]
- Zhu, P.; Hou, G.; Wang, H.Y.; Xu, C.; Zhao, S.; Shen, R. Design, Preparation, and Performance of a Planar Ignitor Inserted with PyroMEMS Safe and Arm Device. J. Microelectromech. Syst. 2018, 27, 1186–1192. [Google Scholar] [CrossRef]
- Hussein, H.; Khan, F.; Younis, M. A monolithic tunable symmetric bistable mechanism. Smart Mater. Struct. 2020, 29, 075033. [Google Scholar] [CrossRef]
- Joshitha, C.; Santhosh, C.; Sreeja, B.; Rooban, S.; Rao, G. Bistable microdevice with electrothermal compliant mechanism. Trans. Electr. Electron. Mater. 2021, 23, 262–271. [Google Scholar] [CrossRef]
- Thachil, G.; Nair, D.; DasGupta, A. Design and fabrication of reliable power efficient bistable MEMS switch using single mask Process. J. Microelectromech. Syst. 2020, 29, 1225–1233. [Google Scholar] [CrossRef]
- Yadav, D.; Murthy, N.; Palathingal, S.; Shekhar, S.; Giridhar, M.; Ananthasuresh, G. A two-terminal bistable electrothermally actuated microswitch. J. Microelectromech. Syst. 2019, 28, 540–549. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Width (w) | Length (L) | Thickness (h) | Angle(θ) | Number of Beams |
|---|---|---|---|---|---|
| Barrier Actuator | 38 | 1370 | 50 | 3 | 6 |
| Pawl Actuator | 38 | 1305 | 50 | 3 | 3 |
| Unit | μm | μm | μm | ° | None |
| Item | Width (w’) | Length (L’) | Distance between Two of the Soft Beams (Ld) | Enlarged Proportion |
|---|---|---|---|---|
| Barrier Actuator | 14 | 450 | 100 | 47.44 |
| Pawl Actuator | 14 | 350 | 100 | 23.26 |
| Unit | μm | μm | μm | None |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Hu, T.; Zhao, Y.; Ren, W.; Liu, J. Design of a Double-Layer Electrothermal MEMS Safety and Arming Device with a Bistable Mechanism. Micromachines 2022, 13, 1076. https://doi.org/10.3390/mi13071076
Wang K, Hu T, Zhao Y, Ren W, Liu J. Design of a Double-Layer Electrothermal MEMS Safety and Arming Device with a Bistable Mechanism. Micromachines. 2022; 13(7):1076. https://doi.org/10.3390/mi13071076
Chicago/Turabian StyleWang, Kexin, Tengjiang Hu, Yulong Zhao, Wei Ren, and Jiakai Liu. 2022. "Design of a Double-Layer Electrothermal MEMS Safety and Arming Device with a Bistable Mechanism" Micromachines 13, no. 7: 1076. https://doi.org/10.3390/mi13071076
APA StyleWang, K., Hu, T., Zhao, Y., Ren, W., & Liu, J. (2022). Design of a Double-Layer Electrothermal MEMS Safety and Arming Device with a Bistable Mechanism. Micromachines, 13(7), 1076. https://doi.org/10.3390/mi13071076