
Active Pressure Ripple Reduction of a Self-Supplied Variable Displacement Pump with Notch Least Mean Square Filter

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mathematical Model
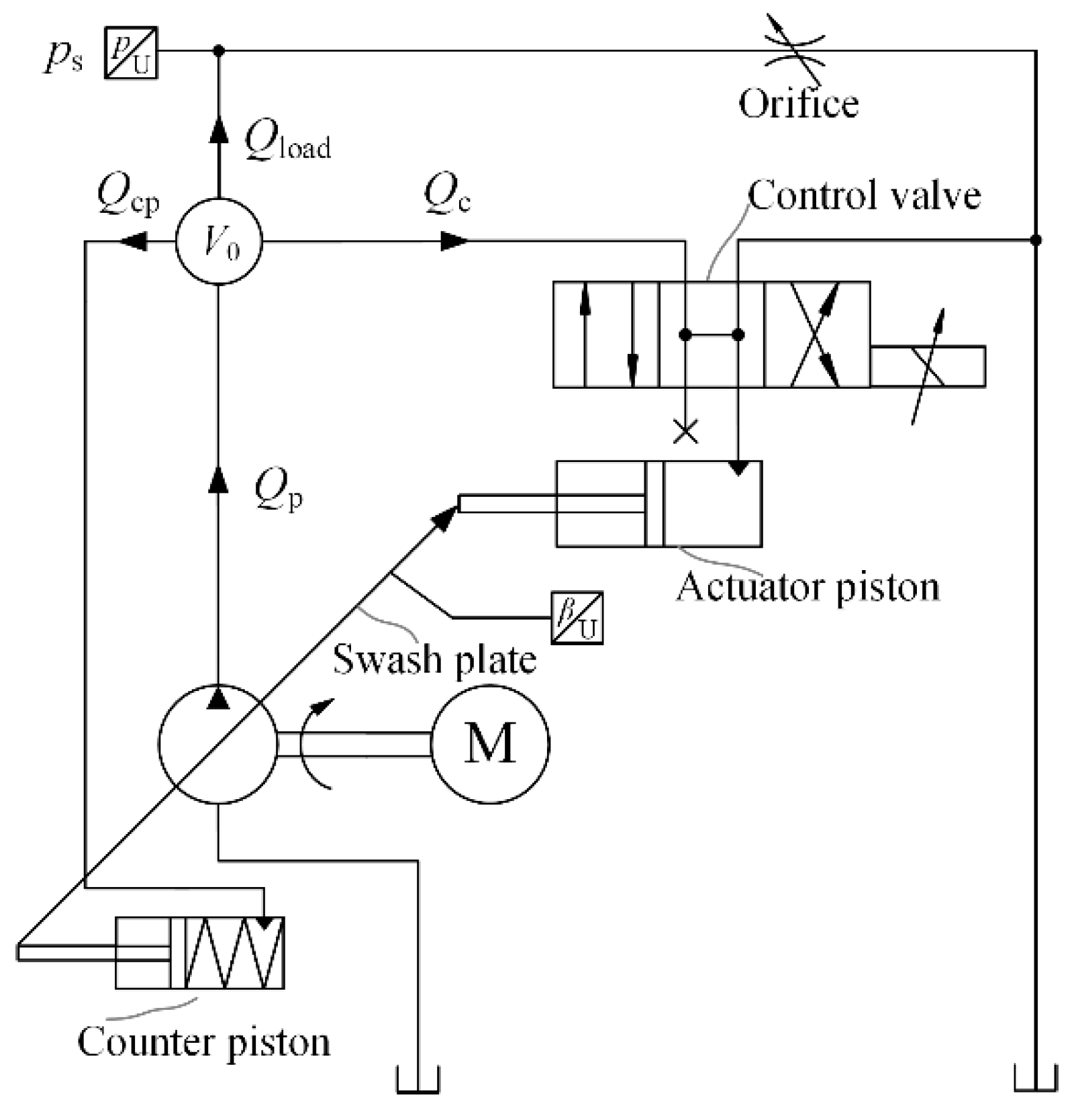
2.1. Description of the Physical System
2.2. Axial Piston Pump
2.3. Swash Plate Control System
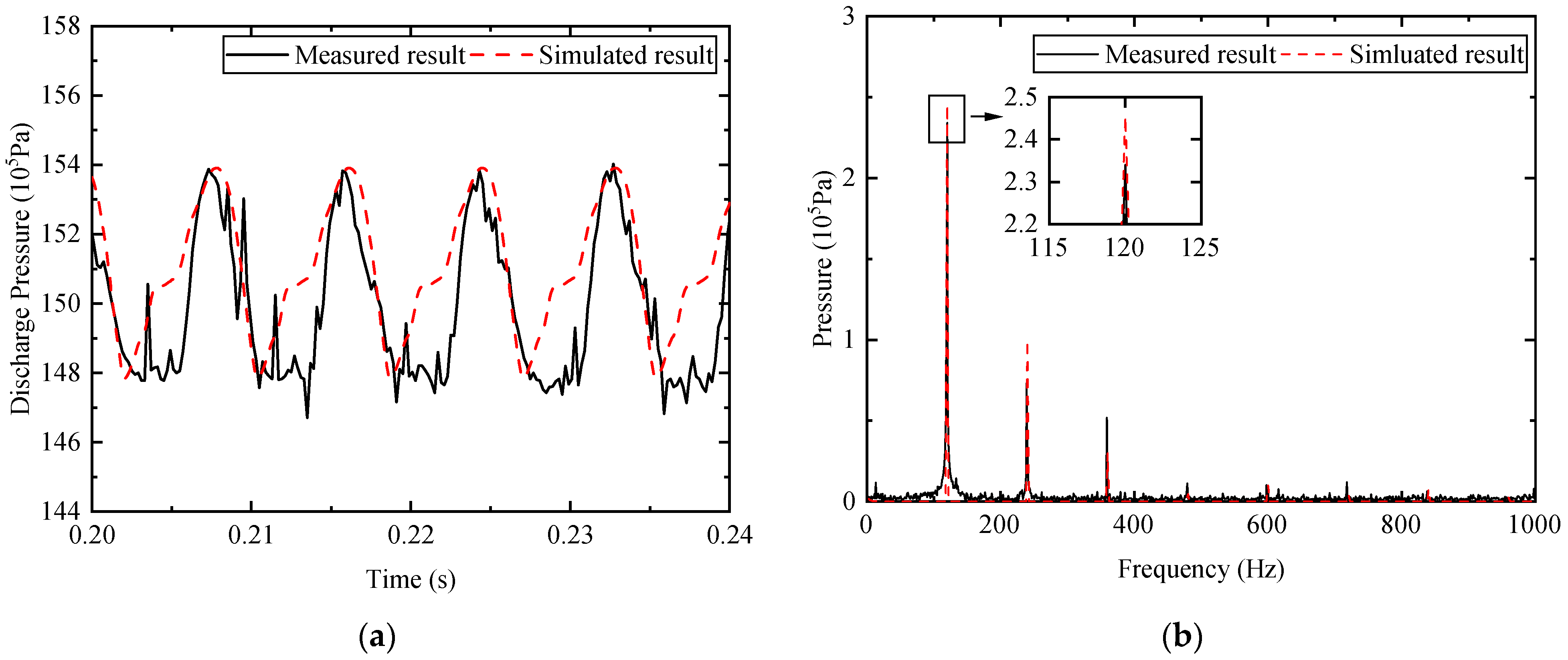
2.4. Model Validation
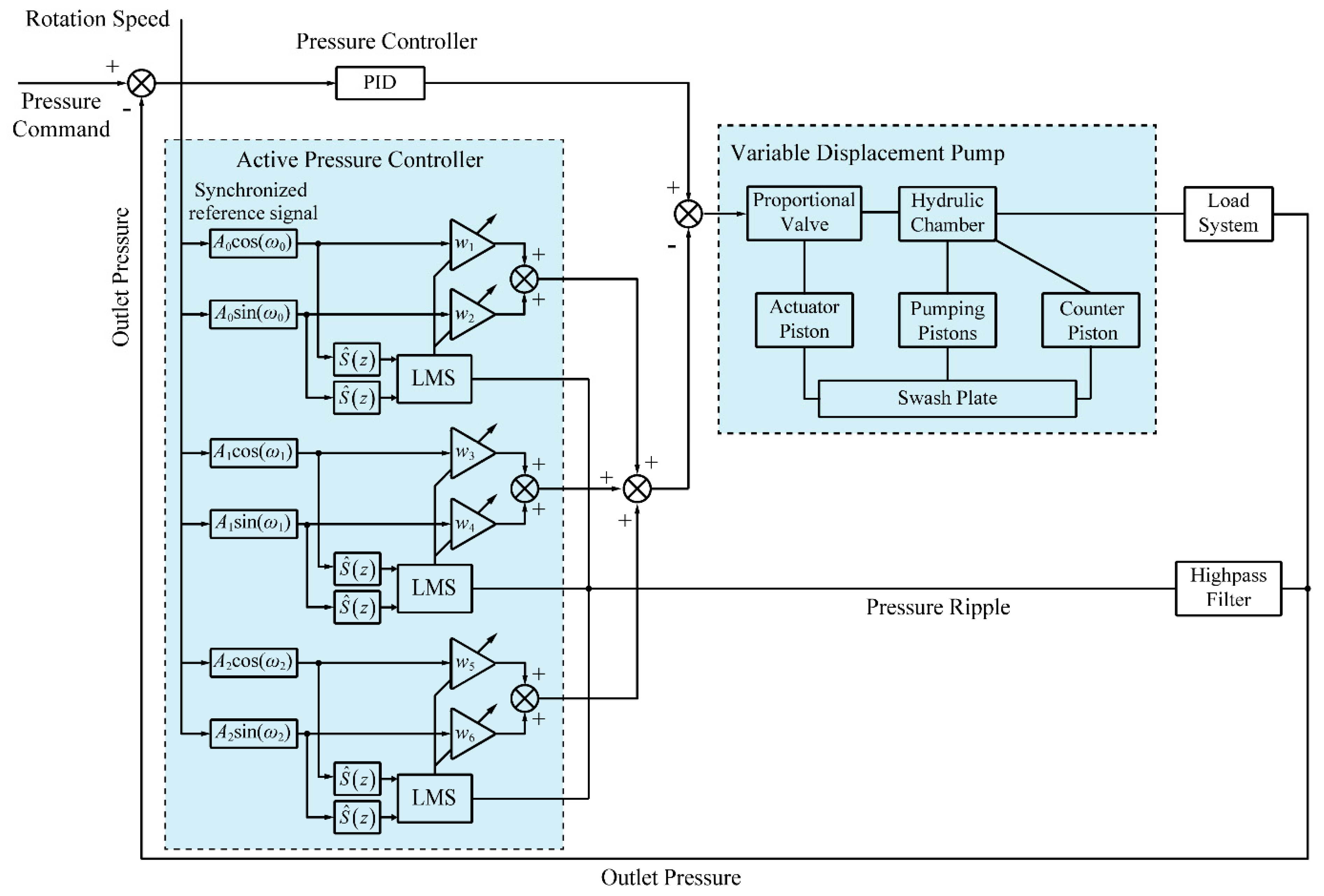
3. Active Pressure Ripple Control
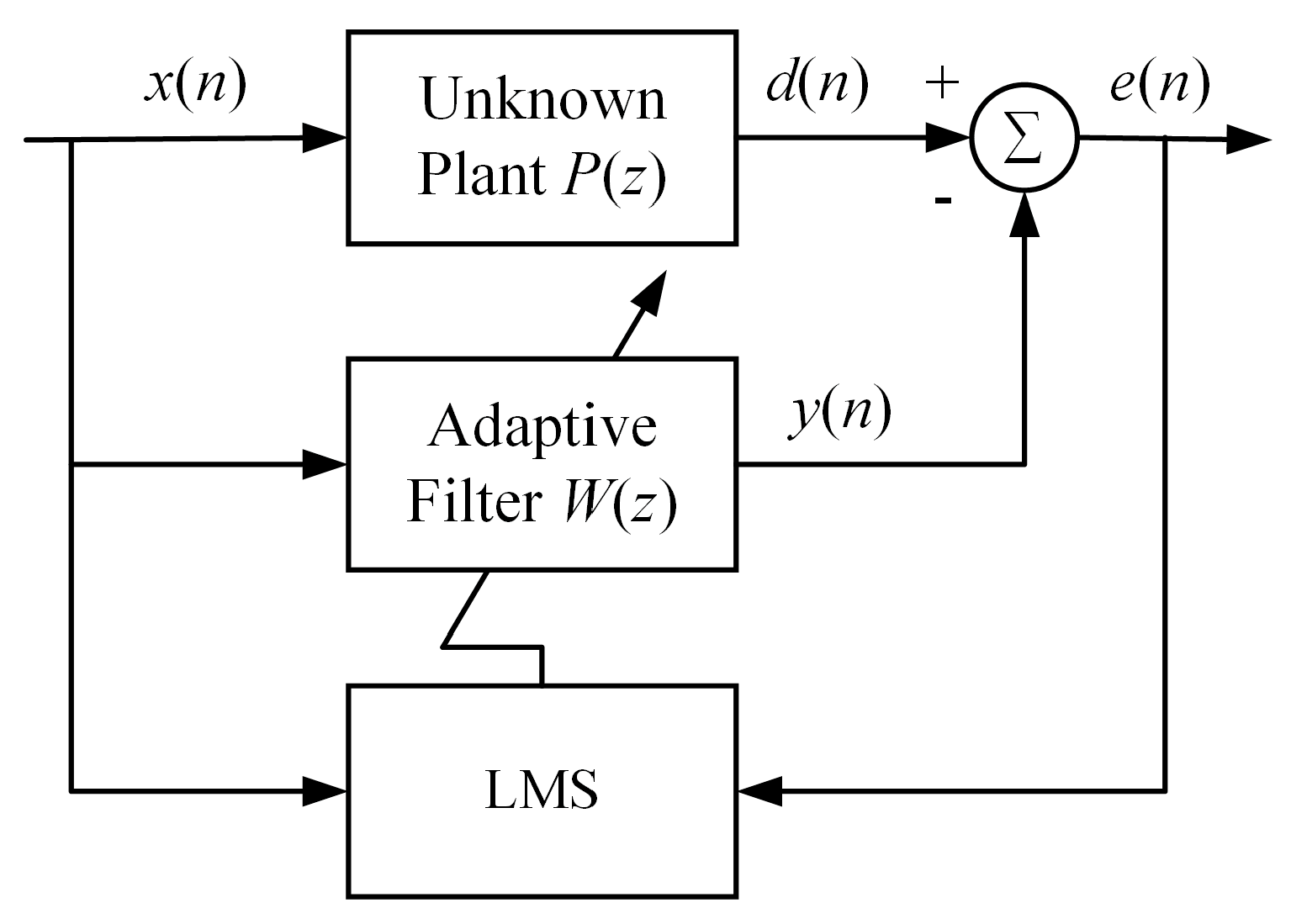
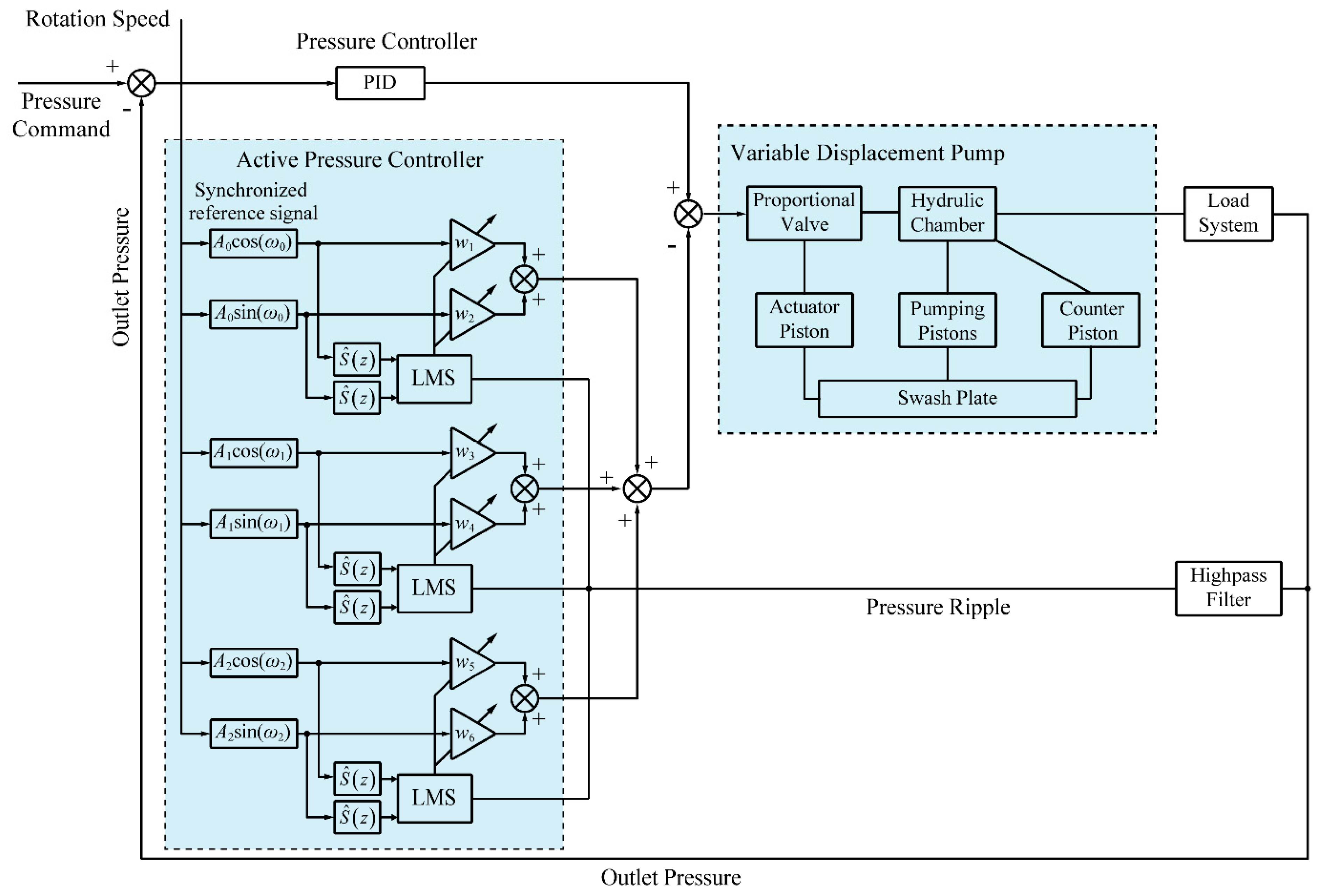
3.1. Active Pressure Controller
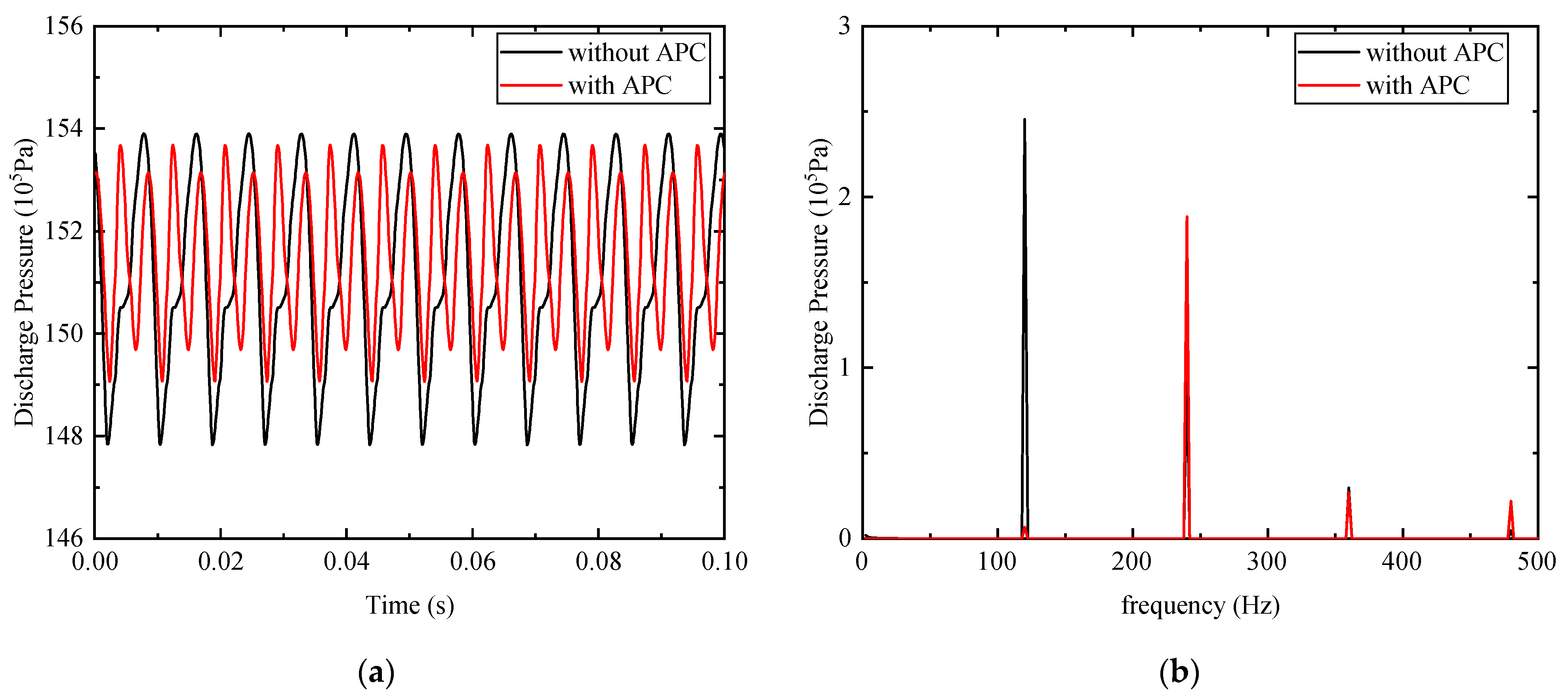
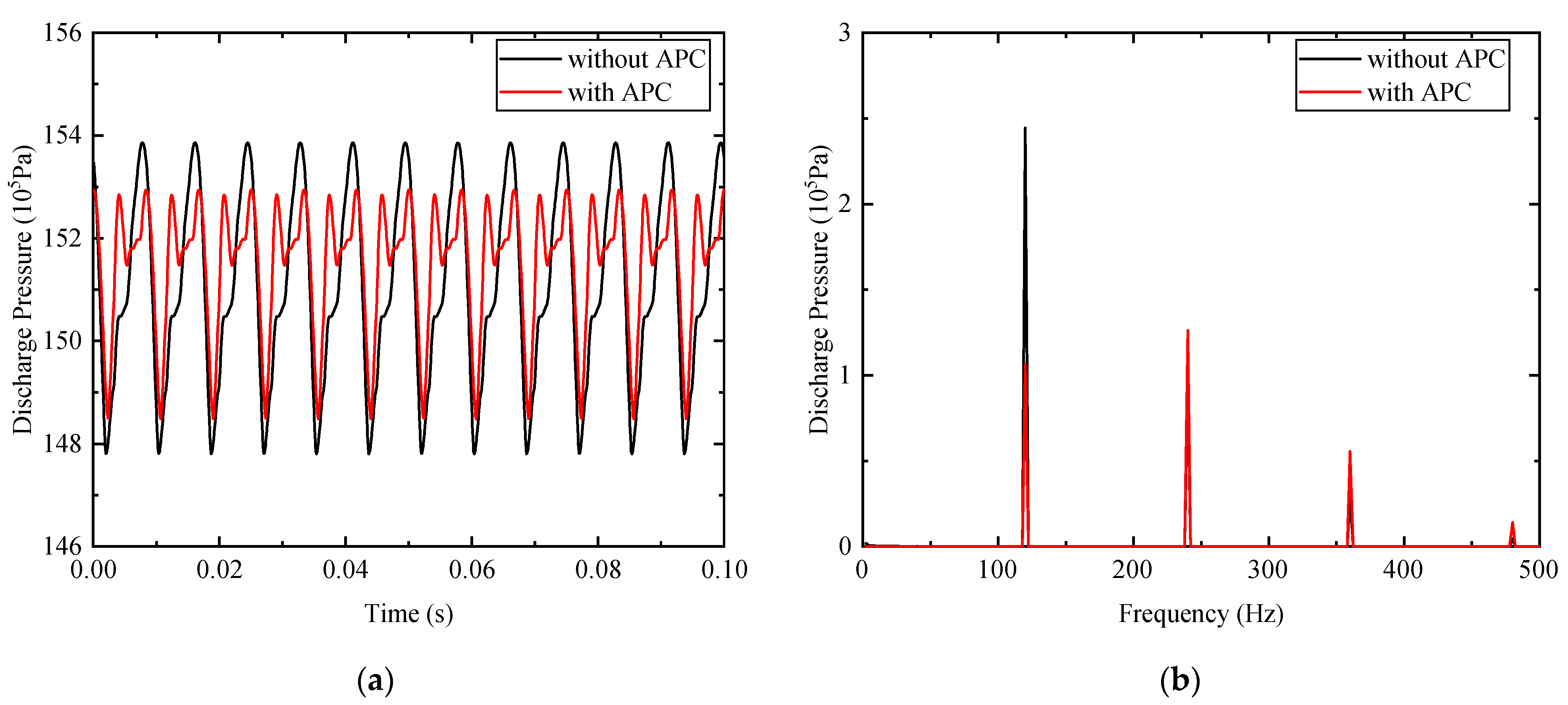
3.2. Simulation Results
4. Analysis and Discussion
5. Conclusions
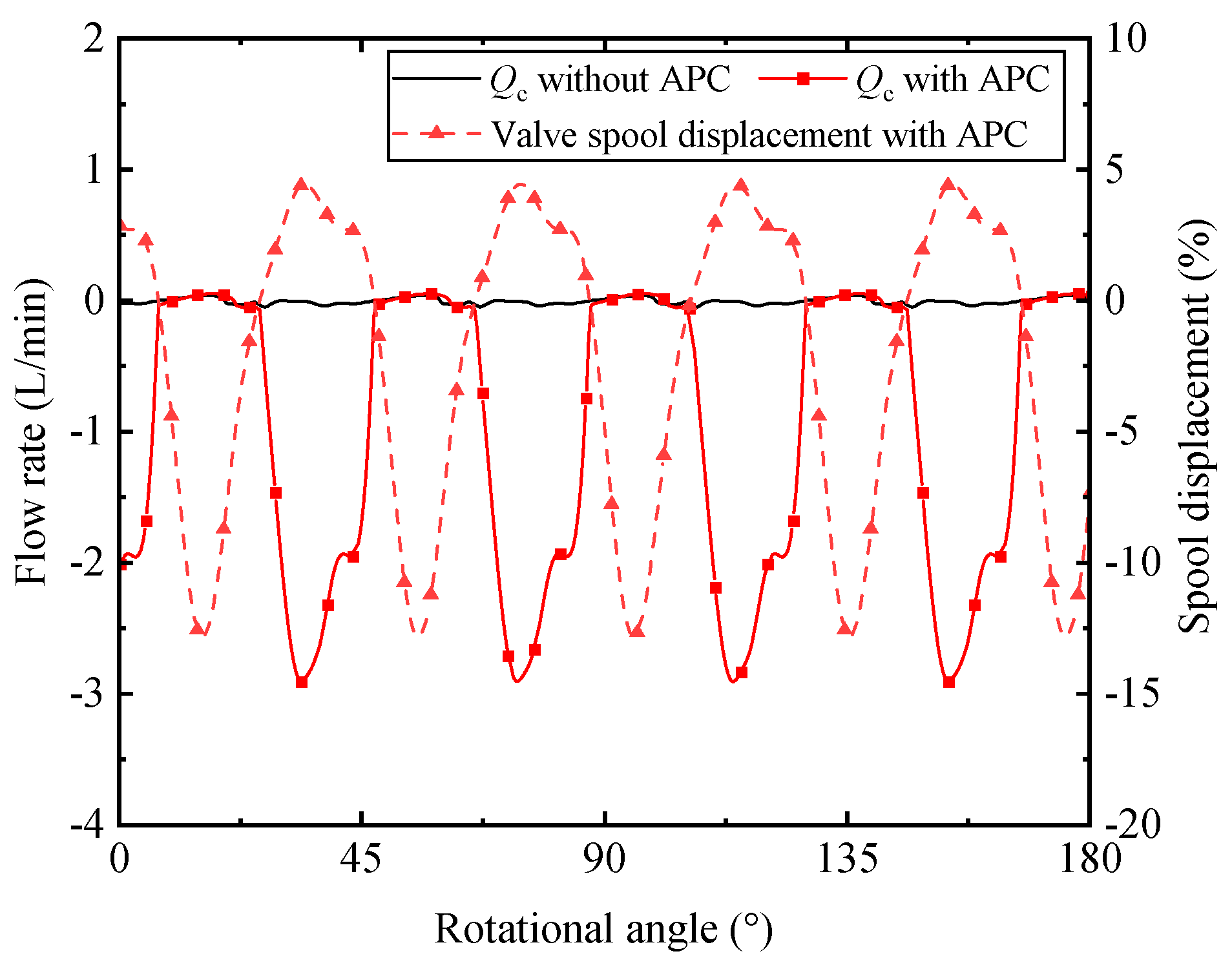
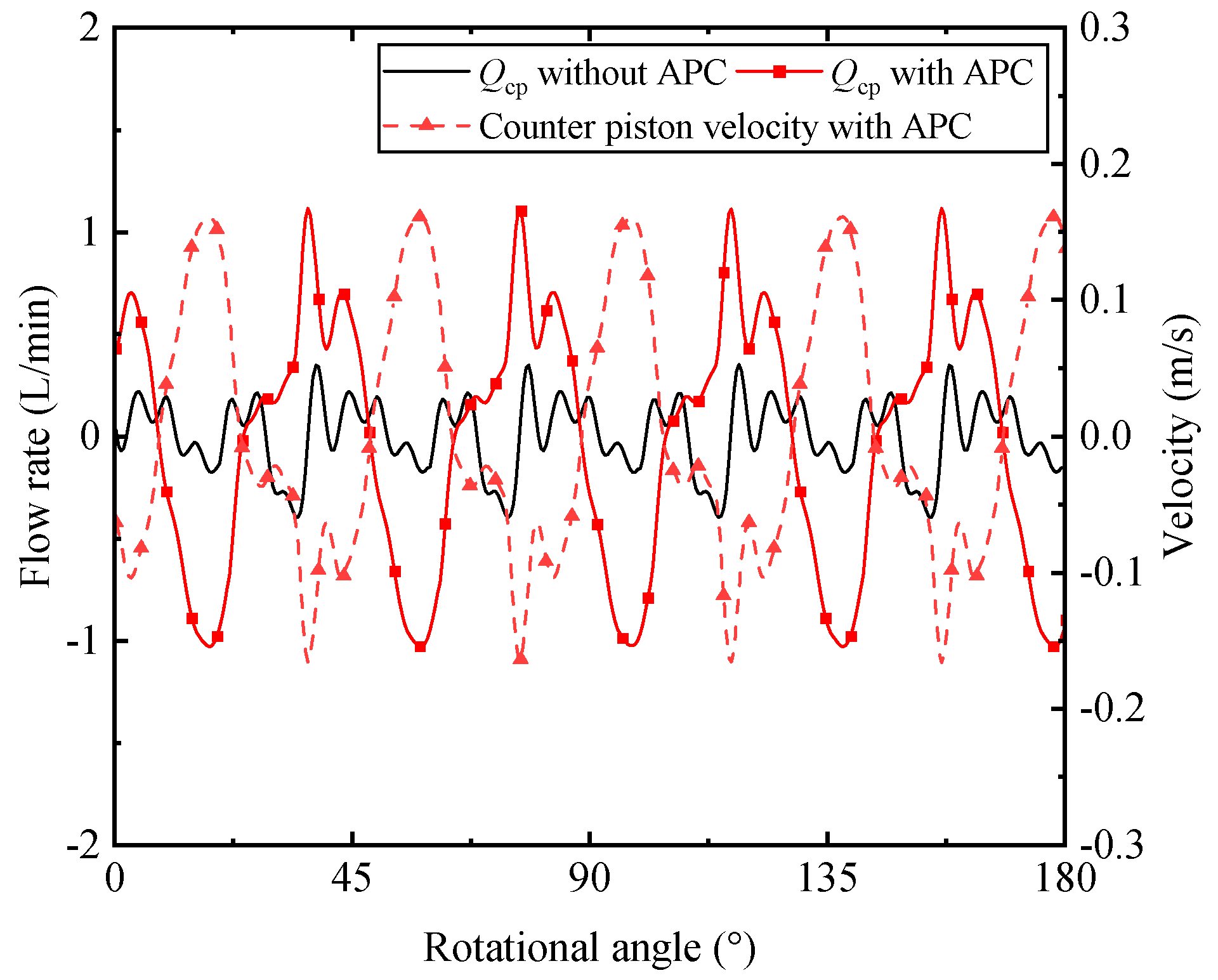
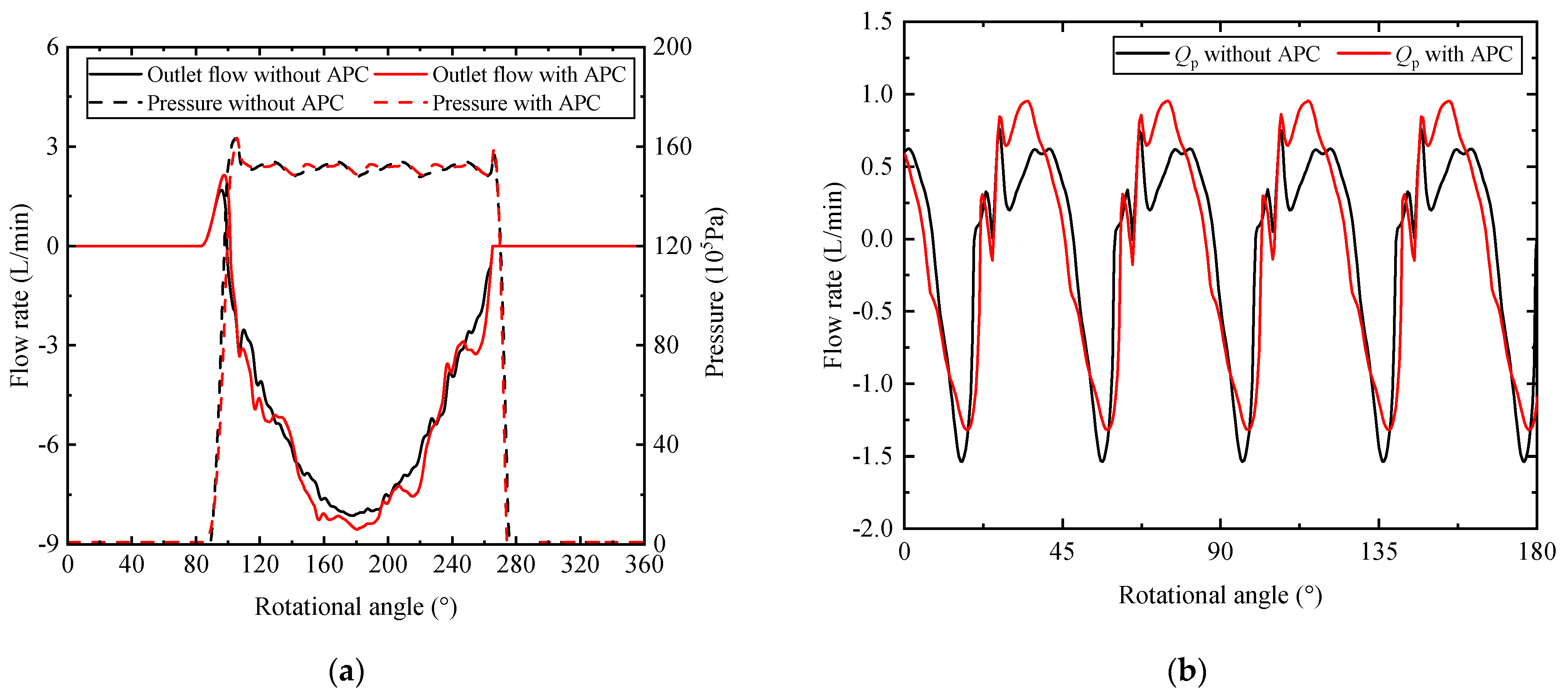
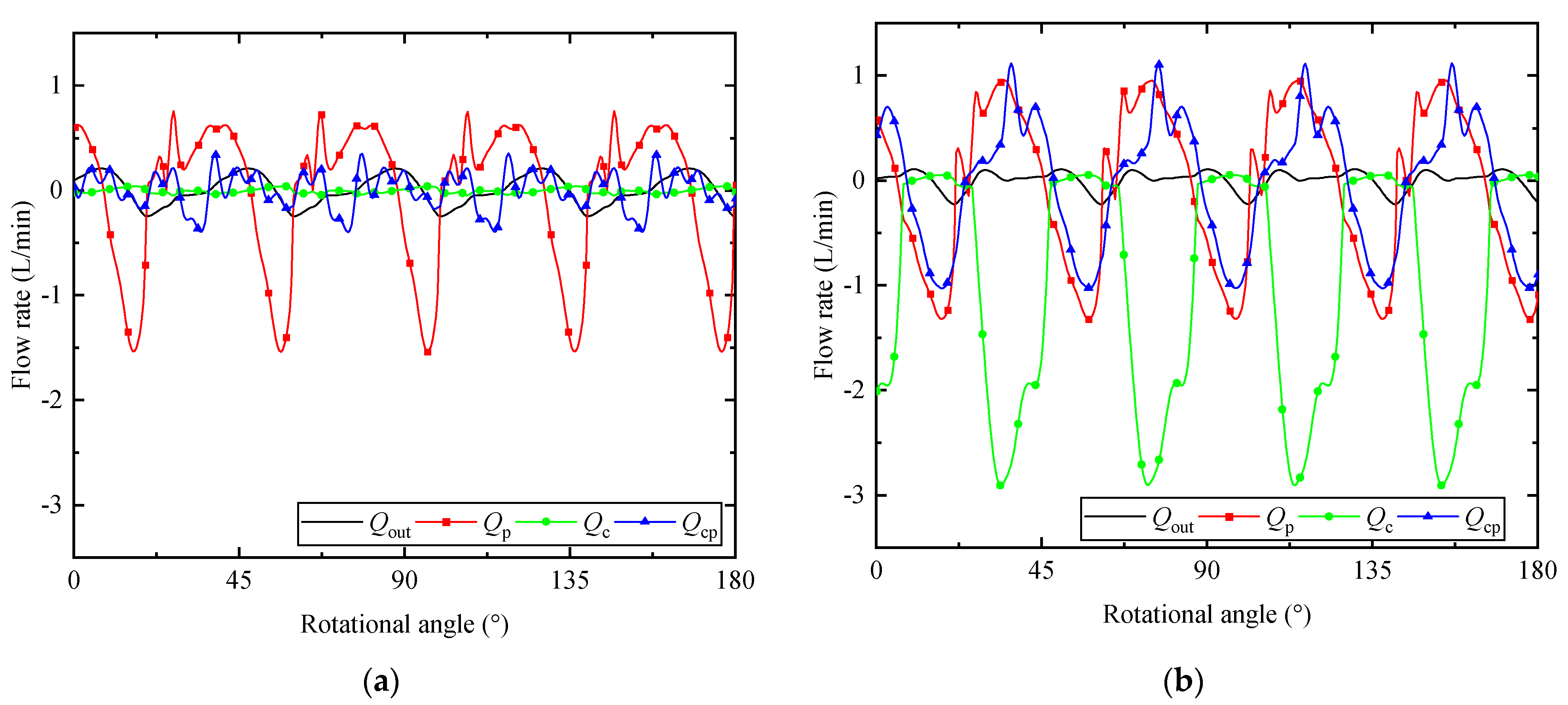
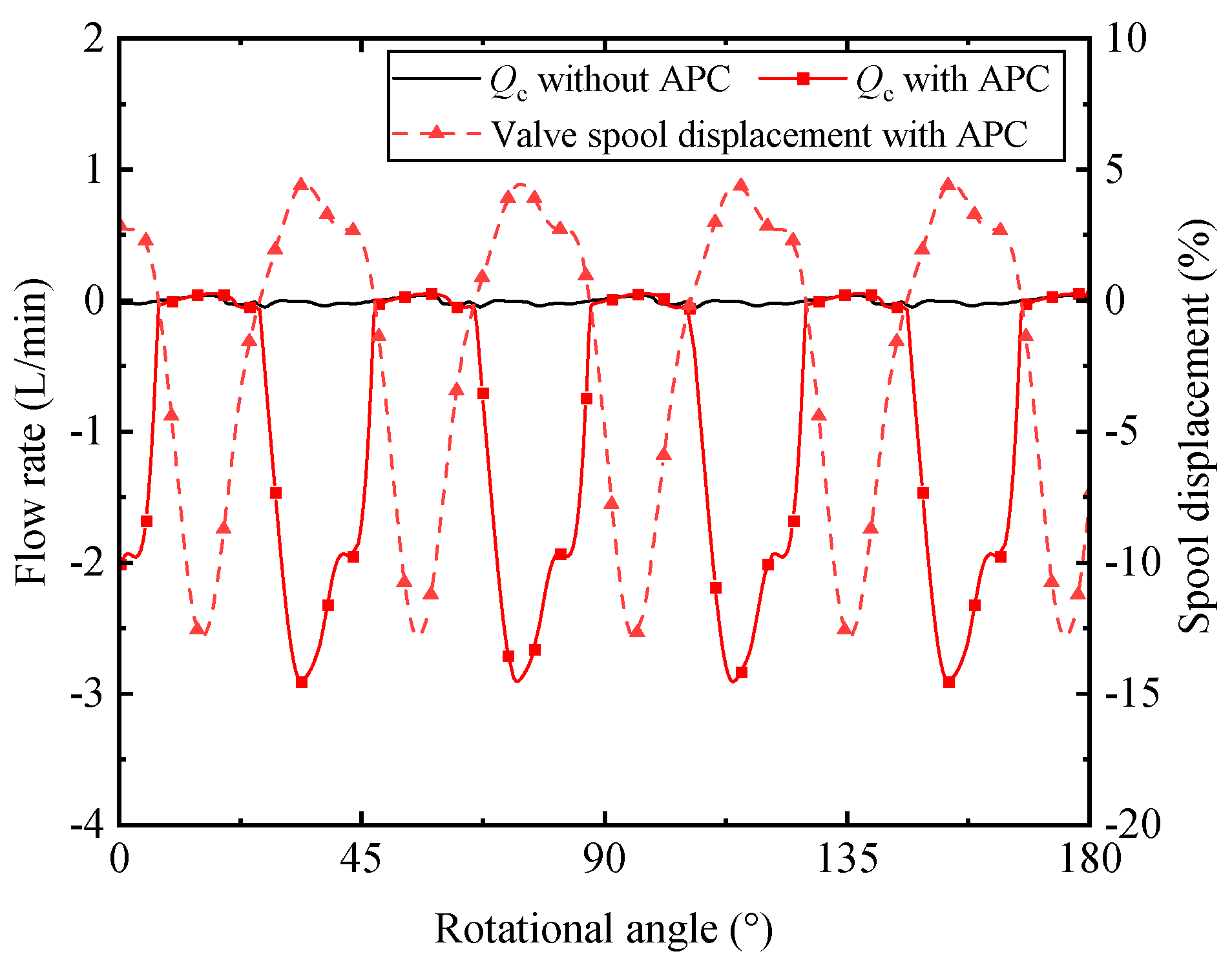
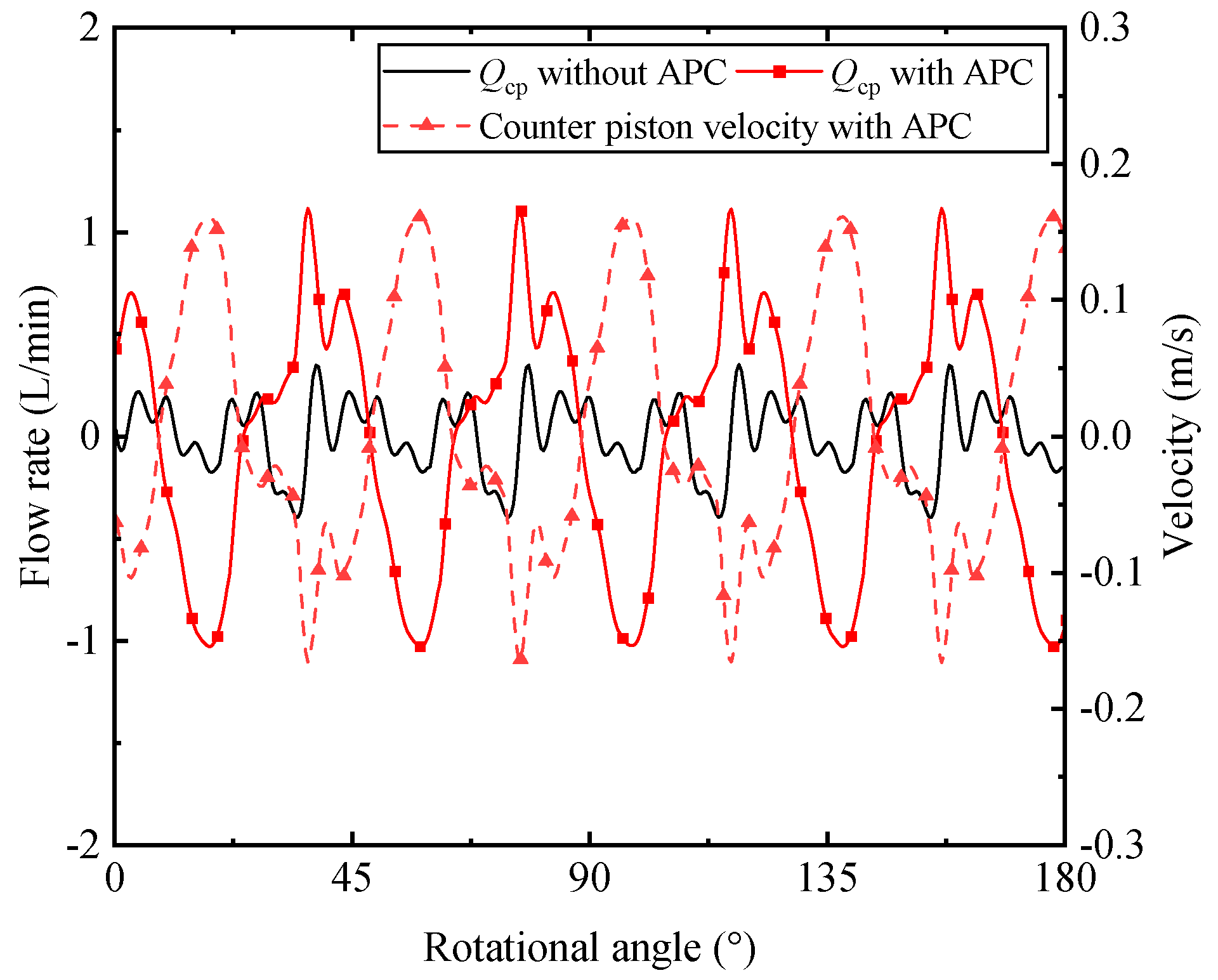
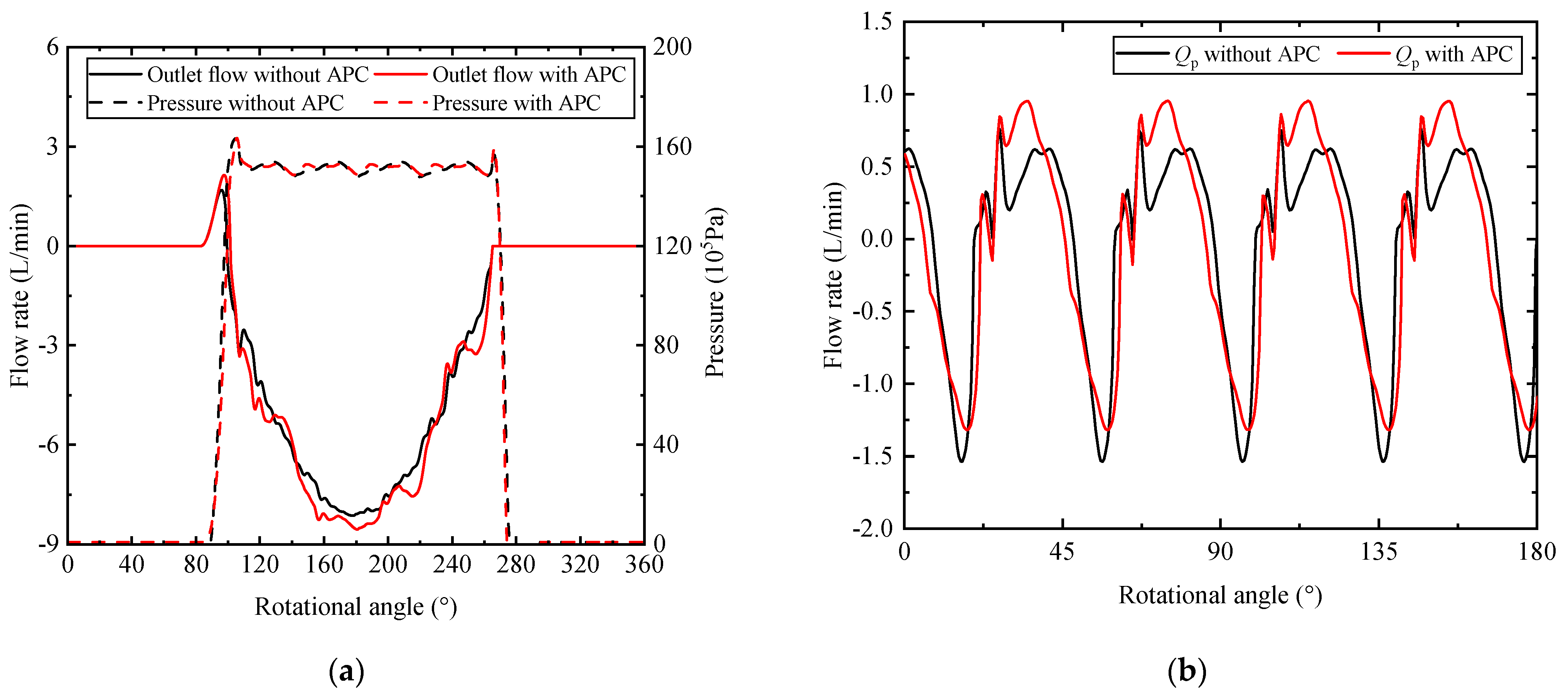
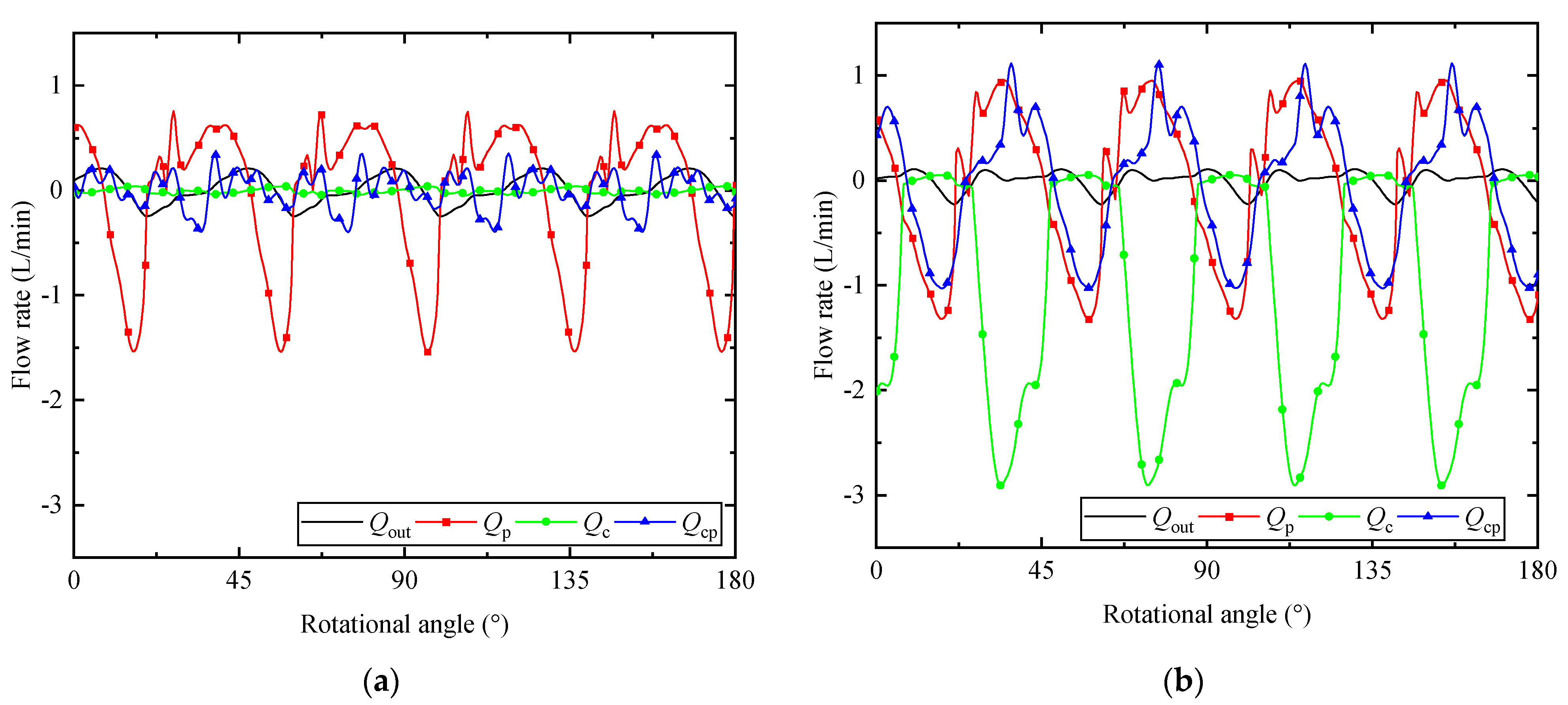
- The amplitude and angular position of the peak value in the flow curve have been changed due to the swash plate oscillation and valve spool movement. The major reason is that the flow from the actuator piston neutralizes the peak value of the flow ripple generated by the nine pistons and the counter piston. The pumping dynamic has been altered due to the larger swash plate oscillation, which might account for the vibration and noise reduction.
- For a better suppression effect, the higher frequency response of the control valve is required. In general, the amplitude of the swash plate oscillation is limited by the poor dynamic characteristic of the swash plate control system, which restricts the utility of the nine pistons flow.
- Like other active pressure control techniques, the proposed method affected the volumetric efficiency due to the additional flow to the tank port, and the reciprocal motion of the control valve does challenge its reliability. In future work, a possible approach to tackle this issue could be to combine the passive technique in the high frequency with the active technique in the low frequency.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, H.-Y.; Pan, M. Engineering research in fluid power: A review. J. Zhejiang Univ. Sci. A 2015, 16, 427–442. [Google Scholar] [CrossRef] [Green Version]
- Ye, S.; Zhang, J.; Xu, B.; Hou, L.; Xiang, J.; Tang, H. A theoretical dynamic model to study the vibration response charac-teristics of an axial piston pump. Mech. Syst. Signal Process. 2021, 150, 107237. [Google Scholar] [CrossRef]
- Liu, Y.-Y.; Li, Y.-R.; Wang, L.-Q. Experimental and theoretical studies on the pressure fluctuation of an internal gear pump with a high pressure. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 233, 987–996. [Google Scholar] [CrossRef]
- Ivantysyn, J.; Ivantysynova, M. Hydrostatic Pumps and Motors: Principles, Design, Performance, Modelling, Analysis, Control and Testing; Akademia Books International: New Delhi, India, 2003. [Google Scholar]
- Gao, P.; Yu, T.; Zhang, Y.; Wang, J.; Zhai, J. Vibration analysis and control technologies of hydraulic pipeline system in aircraft: A review. Chin. J. Aeronaut. 2021, 34, 83–114. [Google Scholar] [CrossRef]
- Shang, Y.; Tang, H.; Sun, H.; Guan, C.; Wu, S.; Xu, Y.; Jiao, Z. A novel hydraulic pulsation reduction component based on discharge and suction self-oscillation: Principle, design and experiment. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2019, 234, 433–445. [Google Scholar] [CrossRef]
- Ye, S.; Zhang, J.-H.; Xu, B. Noise reduction of an axial piston pump by valve plate optimization. Chin. J. Mech. Eng. 2018, 31, 57. [Google Scholar] [CrossRef] [Green Version]
- Pan, Y.; Chen, A.; Wang, Z. Fluid dynamic characteristics and flow distribution structure optimization of axial piston pump considering cavitation bubble evolution. J. Appl. Fluid Mech. 2021, 14, 1603–1616. [Google Scholar]
- Hesheng, T.; Ren, Y.; Xiang, J.; Guo, C. Effect of damping groove on flow dynamics and vibration characteristics of axial piston pump. AIP Adv. 2019, 9, 035014. [Google Scholar] [CrossRef] [Green Version]
- Kalbfleisch, P.K.; Ivantysynova, M. Computational Valve Plate Design in Axial Piston Pumps/Motors. Int. J. Fluid Power 2019, 20, 177–202. [Google Scholar] [CrossRef]
- Marinaro, G.; Frosina, E.; Senatore, A.; Stelson, K.A. A Fast and Effective Method for the Optimization of the Valve Plate of Swashplate Axial Piston Pumps. J. Fluids Eng. 2021, 143, 091203. [Google Scholar] [CrossRef]
- Johansson, A.; Övander, J.; Palmberg, J.-O. Experimental verification of cross-angle for noise reduction in hydraulic piston pumps. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2007, 221, 321–330. [Google Scholar] [CrossRef]
- Liselott, E. On fluid power pump and motor design-tools for noise reduction. Ph.D. Dissertation, Linkoping University, Linkoping, Sweden, 2011. [Google Scholar]
- Shang, X.; Zhou, H.; Yang, H. Numerical study on a compound hydraulic pulsation attenuator based on string-fluid resonance. J. Mech. Sci. Technol. 2020, 34, 4091–4106. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, S.; Wang, H.; Luo, X.; Deng, J.; Zhu, Y. The approach on reducing the pressure pulsation and vibration of seawater piston pump through integrating a group of accumulators. Ocean Eng. 2019, 173, 319–330. [Google Scholar]
- Wang, Y.; Shen, T.; Tan, C.; Fu, J.; Guo, S. Research status, critical technologies, and development trends of hydraulic pressure pulsation attenuator. Chin. J. Mech. Eng. 2021, 34, 1–17. [Google Scholar] [CrossRef]
- Guan, C.; Jiao, Z.; Wu, S.; Shang, Y.; Zheng, F. Active control of fluid pressure pulsation in hydraulic pipe system by bilateral-overflow of piezoelectric direct-drive slide valve. J. Dyn. Syst. Meas. Control 2014, 136, 031025. [Google Scholar]
- Zhai, J.; Li, J.; Wei, D.; Gao, P.; Yan, Y.; Han, Q. Vibration Control of an Aero Pipeline System with Active Constraint Layer Damping Treatment. Appl. Sci. 2019, 9, 2094. [Google Scholar] [CrossRef] [Green Version]
- Pan, M.; Johnston, N.; Hillis, A. Active control of pressure pulsation in a switched inertance hydraulic system. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2013, 227, 610–620. [Google Scholar] [CrossRef]
- Pan, M.; Yuan, C.; Ding, B.; Plummer, A. Novel Integrated Active and Passive Control of Fluid-Borne Noise in Hydraulic Systems. J. Dyn. Syst. Meas. Control. 2021, 143, 091006. [Google Scholar] [CrossRef]
- Ohuchi, H.; Masuda, K. Active Noise Control of a Variable Displacement Axial Piston Pump with Even Number of Cylinders. Proc. JFPS Int. Symp. Fluid Power 1999, 1999, 79–84. [Google Scholar] [CrossRef]
- Kim, T.; Ivantysynova, M. Active vibration control of axial piston machine using higher harmonic least mean square control of swash plate. In Proceedings of the 10th IFK International Conference on Fluid Power, Dresden, Germany, 8–10 March 2016; pp. 91–104. [Google Scholar]
- Kim, T.; Ivantysynova, M. Active vibration control of swash plate-type axial piston machines with two-weight notch least mean square/filtered-x least mean square (LMS/FxLMS) filters. Energies 2017, 10, 645. [Google Scholar] [CrossRef] [Green Version]
- Kim, T.; Ivantysynova, M. Active vibration/noise control of axial piston machine using swash plate control. In Proceedings of the ASME/BATH 2017 Symposium on Fluid Power and Motion Control, Sarasota, FL, USA, 16–19 October 2017. [Google Scholar]
- Casoli, P.; Pastori, M.; Scolari, F.; Rundo, M. Active pressure ripple control in axial piston pumps through high-frequency swash plate oscillations—A theoretical analysis. Energies 2019, 12, 1377. [Google Scholar] [CrossRef] [Green Version]
- Ericson, L. Movement of the swash plate in variable in-line pumps at decreased displacement setting angle. In Proceedings of the International Congress of Mechanical Engineering, Ribeirão Preto, Brazil, 3–7 November 2013. [Google Scholar]
- Huang, X.; Xu, B.; Zhang, J. The influence of the swash plate oscillation on pressure ripple in variable displacement axial piston pump. In Proceedings of the 12th International Fluid Power Conference, Dresden, Germany, 9–11 March 2020. [Google Scholar]
- Widrow, B.; Hoff, M.E. Adaptive Switching Circuits; Stanford Univ Ca Stanford Electronics Labs: Stanford, CA, USA, 1960. [Google Scholar]
- Kuo, S.M.; Morgan, D.R. Active noise control: A tutorial review. Proc. IEEE 1999, 87, 943–975. [Google Scholar] [CrossRef] [Green Version]
- Song, P.; Zhao, H. Filtered-x least mean square/fourth (FXLMS/F) algorithm for active noise control. Mech. Syst. Signal Process. 2019, 120, 69–82. [Google Scholar] [CrossRef]
- Meng, H.; Chen, S. A modified adaptive weight-constrained FxLMS algorithm for feedforward active noise control systems. Appl. Acoust. 2020, 164, 107227. [Google Scholar] [CrossRef]
- Zhao, T.; Liang, J.; Zou, L.; Zhang, L. A New FXLMS Algorithm with Offline and Online Secondary-Path Modeling Scheme for Active Noise Control of Power Transformers. IEEE Trans. Ind. Electron. 2017, 64, 6432–6442. [Google Scholar] [CrossRef]
- Pan, Y.; Li, Y.; Huang, M.; Liao, Y.; Liang, D. Noise source identification and transmission path optimisation for noise reduction of an axial piston pump. Appl. Acoust. 2018, 130, 283–292. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, X.; Xu, B.; Huang, W.; Xu, H.; Lyu, F.; Su, Q. Active Pressure Ripple Reduction of a Self-Supplied Variable Displacement Pump with Notch Least Mean Square Filter. Micromachines 2021, 12, 932. https://doi.org/10.3390/mi12080932
Huang X, Xu B, Huang W, Xu H, Lyu F, Su Q. Active Pressure Ripple Reduction of a Self-Supplied Variable Displacement Pump with Notch Least Mean Square Filter. Micromachines. 2021; 12(8):932. https://doi.org/10.3390/mi12080932
Chicago/Turabian StyleHuang, Xiaochen, Bing Xu, Weidi Huang, Haogong Xu, Fei Lyu, and Qi Su. 2021. "Active Pressure Ripple Reduction of a Self-Supplied Variable Displacement Pump with Notch Least Mean Square Filter" Micromachines 12, no. 8: 932. https://doi.org/10.3390/mi12080932
APA StyleHuang, X., Xu, B., Huang, W., Xu, H., Lyu, F., & Su, Q. (2021). Active Pressure Ripple Reduction of a Self-Supplied Variable Displacement Pump with Notch Least Mean Square Filter. Micromachines, 12(8), 932. https://doi.org/10.3390/mi12080932